國立臺灣大學工學院機械工程學研究所 碩士論文
Department of Mechanical Engineering College of Engineering
National Taiwan University Master Thesis
受弧形邊界拘束之彈性樑的變形及穩定性分析 Deformation and Stability of an Elastica
Constrained by Curved Surfaces
洪紹育 Hung, Shao-Yu
指導教授:陳振山 博士 Advisor: Chen Jen-San, Ph.D.
中華民國 100 年 6 月
June, 2011
致謝
短短的兩年一眨眼就過了,碩一當學弟時的種種回憶還歷歷在 目,卻已成為要踏入社會的畢業生。想著當初進入研究所的迷惘及無 知,到現在終於也能幫忙解決問題,我想這就叫做成長吧!但這一切,
除了自己的努力之外,應歸功於許多人的幫助。
首先感謝指導教授陳振山老師的器重,在這兩年中我親身感受到 老師對學術的熱情以及儉樸的生活,他總是在我遇到難關時給予方向 及鼓勵,我想我永遠忘不了繚繞在工綜七樓的爽朗笑聲!
接著要感謝最愛我的家人,對我的選擇全力支持,並讓我衣食無 慮,可以專心在研究上。雖說從小就出外求學,但是彰化老家永遠是 我的避風港,返校前的那一聲加油常在我心。
Lab403 的各位,你們正是這段日子難忘的原因。學長們:偉嘉、
書豪、弘基、家瑋和明叡,在我初學乍練時給與我信心,以及每個汗 流浹背的熱血午後籃球。同梯們:耀億、以翔、唯中、頌庭和孟軒,
天天打嘴砲、天天裱唯中、天天迷失在118 巷,這些每天再普通不過 的例行公事將成為研究生回憶最難忘的一頁。學弟們:智文、佑承、
昇祐、徐穎及名哲,請好好照顧本實驗室首位學妹,延續我們優良的 傳統。
紹育于 Lab403
受弧形邊界拘束之彈性樑的變形及穩定性分析
摘 要
本文中我們考慮在底部平面兩端夾持(clamped-clamped)的彈性 樑(elastica)在受到頂部牆面側向壓縮後的變形及穩定性。我們考慮三 種頂部牆面:分別為凹面(concave)、凸面(convex)及平面(plane)。首先 建立受壓縮彈性樑的變形軌跡圖,接著由振動法決定各式變形的穩定 性。當頂部牆面以半靜態方式(quasi-statically)壓縮時,我們架設實驗 驗證理論上預測的變形演變。當頂部牆面為平面時,free fold(與牆面 發生點接觸前的變形)恰接觸到牆面時,壓縮外力會減少到零。當頂 部牆面不再是平面時,此現象就不見得存在。當頂部牆面不再是平 面,線接觸變形的多樣性會受到破壞。當頂部牆面為凹面時,頂面不 會發生二次挫曲,反而是底部平面兩端的線接觸持續變長。當頂部牆 面為凸面不會發生頂部線接觸。
關鍵字:彈性樑、變形、穩定性、弧形邊界。
Deformation and Stability of an Elastica Constrained by Curved Surfaces
Abstract
In this paper we consider the deformation and stability of a clamped-clamped elastica resting on a bottom plane and pressed by a top wall laterally. Three types of top walls are considered; they are concave, convex, and plane surfaces. Deformation maps of the pressed elastica are first constructed. The stability of various deformation patterns is determined via a vibration method. The theoretical predictions on the deformation evolution when the top wall presses quasi-statically are verified experimentally. In the case of plane top wall, the external pressing force reduces to zero whenever the free fold of a previous deformation starts to touch the wall. In the case when the top wall is not a plane, this is in general no longer true. The multiplicity of line-contact deformations in the case of plane top wall is destroyed when the top wall is curved. No secondary buckling will occur when the top wall is concave.
Instead, line contact on the sides of the bottom plane will develop. In the case when the top wall is convex, no line contact on the top wall is possible.
Keyword: Elastica, Deformation, Stability, Curved Surface.
目 錄
第一章 導論...1
第二章 理論模型 ...4
第三章 彈性樑的靜態變形 ...5
3.1 在兩接觸面皆為點接觸 ...6
3.2 頂部弧面為線接觸 ...8
第四章 振動和穩定性分析 ...11
4.1 在兩接觸面皆為點接觸 ...11
4.2 邊界條件 ...15
4.3 接觸條件 ...16
4.4 ε1與ε2座標間的轉換...17
4.5 求解方法 ...18
4.6 頂面為線接觸 ...21
第五章 彈性樑的變形軌跡圖 ...22
5.1 凹面(Concave wall)...22
5.2 凸面(Convex wall) ...25
5.3 與平面的比較 ...27
5.3.1 頂面為平面的變形軌跡圖...27
5.3.2 多樣性的消失 ...28
5.3.3 基頻(Fundamental natural frequencies)...30
5.3.4 變形分類 ...30
第六章 結論...32
參考文獻...34
附表目錄...36
附圖目錄...41
附錄目錄...60
第一章 導論
彈性桿與剛性牆面的側向接觸在工程上時常發生。當桿的變形大 時,由於變形屬於非線性,我們需要採用彈性樑(elastica)模型進行分 析。為了解兩剛性牆面間彈性桿的行為,產生一個研究領域稱為:受拘 束的彈性樑(constrained elastica)。
拘束彈性樑的剛性牆面可以是任何形狀,最為常見的是平面。其 中一種情況為:平面拘束面被固定在空間中,推進彈性桿時因空間的限 制而產生變形。可參閱Feodosyev [1]、Vaillette 和 Adams [2]、Adams 和Benson [3]、Adan 等人[4]、Domokos 等人[5]、Holmes 等人[6]、Chai [7]和 Ro 等人[8]。另一種情況有點不同,是藉由移動拘束牆面來壓縮 挫曲樑。參見Roman 和 Pocheau [9] [10]。受拘束彈性樑在這兩種設定 之下的行為是類似的。
在某些應用中,彈性樑的拘束面除了平面外也可以是弧面。Wu 和 Juvkam-Wold [11]研究井孔的曲率對鑽油管挫曲的影響。Kuru 等人[12]
研究鑽油管在油井中的挫曲行為與其對軸向力傳遞的影響。Chen 和 Li [13]及 Lu 和 Chen [14]研究心導管在動脈中的變形。普遍來說,受弧面 拘束彈性樑的研究跟受平面拘束的比起來相對較少,主要是因為它的
幾何較複雜。
受拘束彈性樑分析的一大難題在於其解的多樣性。根據靜態分 析,我們可建立變形軌跡圖(deformation map),表示力連續變化時的變 形軌跡。當在相同的受力情況下,多於一組的靜態解存在是很常見的。
所以,雖然建立了變形軌跡圖,我們還是無法準確知道實際的情況,
因為並不是所有計算出的變形皆存在於現實中,只有穩定變形才存在 於現實中。
近來,Chen 和 Ro [15]及 Ro 等人[8]使用振動法計算受點拘束和平 面拘束彈性樑的自然頻率並決定穩定性。他們指出在振動分析時必須 考慮彈性樑和拘束面間的滑動,為了完成分析,使用 Eulerian 形式的 運動方程式取代傳統的 Lagrangian 形式。上述研究專注於平面拘束牆 面,而考慮到許多包含弧形拘束面的應用,將受拘束彈性樑的穩定性 理論推廣到受弧形牆面拘束是必要的。
在本文中我們考慮:兩端夾持的樑一開始置於平面上,接著使樑挫 曲離開平面並將兩端固定在空間中。弧狀邊界於側向壓縮彈性樑,強 迫彈性樑在底部平面和弧狀牆面間產生變形,如圖3-1 所示。此模型可 視為Roman 和 Pocheau [9] [10]研究平面牆面拘束問題的延伸。
在本文的第一部分,當給定受力和幾何參數後,我們建立包含各 種變形patterns 的變形軌跡圖。接著我們提出可求得受拘束彈性樑自然
頻率的振動理論,從振動分析中,受拘束彈性樑的穩定性可被決定。
本文理論忽略摩擦力影響。最後,我們架設實驗觀察受拘束彈性樑的 變形路徑並與理論的預測作比較。
第二章 理論模型
我們考慮不可拉伸彈性樑的總長為L0,彎曲強度和彈性樑單位長 度的密度分別為 EI 及μ。彈性樑一開始為無應力的直樑並置於剛性平 面上,樑的兩端為側向夾持固定。隨著端點外力的施加,樑挫曲離開 平面且兩端的距離縮短為L,端點的移動量定義為e=L0−L。在此變形 之後,挫曲樑(彈性樑)的兩端在空間中完全固定。我們將 xy-座標系統 的原點定在點A,如圖 3-1 所示。曲率半徑ρ的弧形剛性面藉著縮減高 度壓迫彈性樑,使得彈性樑產生變形。弧面的高度 h 為沿著中心線
/ 2
x=L 測量從底部平面到弧面的距離,假設剛性弧形邊界對中心線對 稱。頂部的滑塊只允許 y 方向的平移,為了達到指定的高度縮減,頂 部剛性面受到−y方向的外力 N 作用。弧狀邊界可以是凹面(如圖 3-1 所示)或是凸面,我們也會討論頂面為平面的特殊情形。本文的目的為 研究彈性樑在頂部弧狀牆面影響下的變形及穩定性。
第三章
彈性樑的靜態變形
在靜態分析遇到的第一個問題為:當受力條件給定之後將會產生什 麼變形?不幸的是,並沒有理論明確告訴我們有多少可能的變形存在,
或應該是怎樣的變形。實際操作上我們必須先猜出變形的型態才能繼 續分析,而被猜出的變形是否真的存在則需要進一步作檢驗。如果我 們根據猜測出的型態可以找到解,那此變形就的確存在。另一方面,
若根據猜測出的型態在數值上找不到解,我們並沒有結論指出此變形 型態是否存在,也有可能是變形事實上存在但我們找不到。我們依靠 一些輔助方法來決定是否有些變形在我們的分析中沒被考慮到。在此 分析中我們建立變形軌跡圖(deformation map),表示出當力連續變化時 的變形軌跡。若在變形軌跡圖中有遺漏的軌跡,那就表示有變形沒考 慮到,這提醒了我們應專注於尋找遺漏的變形,直到變形軌跡圖中的 軌跡都完整連接在一起。
在本文中我們使用shooting method 求得受拘束彈性樑的變形。我 們用兩個例子來說明我們採用的方法:其中一個只包含點接觸另一個則 只包含線接觸。混合點接觸和線接觸的複雜變形則為此兩基本例子的 簡單延伸。
3.1 在兩接觸面皆為點接觸
我們首先考慮圖3-1 中受拘束彈性樑的變形。底部的面為平面,頂 部接觸面為曲率半徑
ρ
的凹面。我們先“猜”彈性樑在s=s1與頂部凹面產 生點接觸,然後在s=s2與底部平面有另一個點接觸。s 為從 A 端量起 彈性樑的長度。此變形假設彈性樑在s=s2到1 的區域有一個 free fold。顯然地,此假設變形為非對稱變形。當前的任務為決定此種變形是否 可能發生。
我們假設所有的接觸為無摩擦。彈性樑在兩接觸點上受到R1及R2 兩正向反力,R1指向凹面的曲率中心,而R2則垂直向上。R1的方向可 由角度φ1(逆時針方向為正)指定,其中φ1為接觸點在凹面上的切線與 x 軸的夾角。彈性樑的平衡方程式可表示為:
( ) d
M s EI ds
= θ =F s yx( ) −F s xy( ) (3.1)
其中
1 1 1
( ) sin ( )
x xA
F s = −F −R φ H s−s (3.2)
1 1 1 2 2
( ) cos ( ) ( )
y yA
F s = −F +R φH s−s −R H s−s (3.3) ( )
M s 為彎矩,F sx( )和F sy( )分別為 x 及 y 方向的內力,θ( )s 為受力後彈 性樑的切線角度,H 為步階函數,FxA、FyA和MA為A 端的反力及彎矩。
為了方便起見我們導入以下無因次參數(有星號):
* * * * * *
0
( , , , , , ) ( , , , , , ) s e h x y
s e h x y
L
ρ = ρ , ( *, *) 220 ( , ) 4
x y x y
F F L F F
π EI
= , * 20
4
M L M
π EI
= ,
2 0
1 EI
t t
L μ
∗ = , L20
EI
ω∗ = μ ω (3.4)
t 為時間且ω為自然頻率,之後的動態分析將會討論到。將(3.4)式的關
係代入(3.1)-(3.3)式後,並為了簡化將星號省略,我們得到無因次化的 平衡方程式:
d 4 2
(
F xy F yx)
ds
θ = π − + (3.5)
將(3.5)式對 s 微分,並利用幾何關係式:
dy sin
ds = θ (3.6) dx cos
ds = θ (3.7) 可以得到:
( )
2 2
2 4 xsin ycos
d F F
ds
θ = π θ − θ (3.8)
在A 端的邊界條件為:
0 0
θ s= = (3.9)
0 0
xs= = (3.10)
0 0
ys= = (3.11)
在B 端的邊界條件為:
1 0
θ s= = (3.12)
1 1
xs= = −e (3.13)
0
y = (3.14)
在圓弧凹面上的接觸條件為:
1 1
1 sin
2
s s
x = = −e−ρ φ (3.15)
1 (1 cos )1
ys s= = −h ρ − φ (3.16)
1 1
θ s s= =φ (3.17) 底部平面點接觸條件為:
2 0
θ s s= = (3.18)
2 0
ys s= = (3.19) 我們指定ρ、e 和 h。在 shooting method 中,給定 8 個參數的初猜 值:FxA、FyA、MA、s1、s2、R1、R2和φ1。藉由從 0 到 1 積分(3.6)-(3.8) 三式,用(3.9)-(3.11)式及曲率和彎矩的關係:
2 0
4 A
s
d M
ds
θ π
=
= (3.20)
作為初始條件。由(3.12)-(3.19)式 8 個條件檢查解的準確度,若解的準 確度不符合要求,則再嘗試新的一組初猜值。我們使用牛頓法來加速 迭代的收歛。在得到受拘束彈性樑的變形之後,我們可以決定造成此 變形的外力N =R1cosφ1。當弧面為凸面時,曲率半徑ρ和角度φ取負。
3.2 頂部弧面為線接觸
圖3-2(a)為彈性樑在頂部弧面產生線接觸的變形。我們將彈性樑分 成 3 個區域: 沒有接觸的兩個區域(從 s=0 到s1、從 s=s2到 1)和在頂面
的一段線接觸(從 s=s1到s2).
在 s=0 到s1的區域,(3.8)式平衡方程式中的內力
F s
x( )
和F s 為: y( )x xA
F = −F (3.21)
y yA
F = −F (3.22) 我們將點 s=si處內力的切向及法向分別表示為Pi和Qi(i=1, 2)。在整段線 接觸區域中(s=s1到s2),內力的切線分量保持常數,也就是說P1=P2。由 圖3-2(b)的自由體圖,我們可將 s=s2到1 區域的內力F sx( )和F sy( )表為:
1 1 2 2 2
( ) ( cos sin ) cos sin
x xA yA
F s = − F φ +F φ φ −Q φ (3.23)
1 1 2 2 2
( ) ( cos sin )sin cos
y xA yA
F s = − F φ +F φ φ +Q φ (3.24) A 端及 B 端的邊界條件一樣可由(3.9)-(3.14)式給定。在點 s=s1和s2 的接觸條件為:
i i
θ s s= =φ (3.25) 1
s si
d ds
θ
= ρ
= − (3.26)
1 sin
2
i i
s s
x = = −e−ρ φ (3.27) (1 cos )
i i
ys s= = −h ρ − φ (3.28) (3.25)-(3.28)式的下標 i 可以是 1 或 2。由於彈性樑的不可伸張性,在 (3.25)-(3.28)式中的s2可被表示為:
( )
2 1 1 2
s = +s ρ φ +φ (3.29) 使用shooting method 求解,我們需要 7 個初猜值:F 、F 、M 、
s1、φ1、φ2和Q2。我們在 s=0 到s1的範圍(無接觸區域)積分(3.6)-(3.8)三 式((3.8)式中的Fx和Fy為(3.21)-(3.22)式),初始條件為(3.9)-(3.11)式和 (3.20)式。我們接著在 s=s2到 1 的範圍(無接觸區域)積分(3.6)-(3.8)三式 ((3.8) 式 中 的Fx 和 Fy 為(3.23)-(3.24) 式 ) , 初 始 條 件 為 (3.25)-(3.28) 式 (i=2)。最後檢查 7 個條件來確定解的準確性((3.25)-(3.28)式, i=1;
(3.12)-(3.14)式)。
求得受拘束彈性樑的變形後,我們可決定線接觸段邊界處的集中 反力R1、R2,以及線接觸段的正向均佈力。舉例來說: R1等於恰在點s=s1 之前的剪力(線接觸段s1< <s s2的剪力為零)
1 yAcos 1 xAsin 1
R =F φ −F φ (3.30) 為了計算 q,我們從s1< <s s2範圍中取出任意線段 CD 並畫出其自由體 圖,如圖3-3 所示,對 C 點作力矩平衡我們得到以下關係:
PC
q= ρ
(
FxAcosφ1 FyAsinφ1)
ρ
= + (3.31)
得到 q 之後,由線接觸段剪力為零的條件可知:
2 2
R =Q (3.32)
最後,此變形的外力 N 可由下式計算出來:
2
1cos 1 2cos 2 s ss s1
N =R φ +R φ +q x == . (3.33) 値得注意的是,在此變形中我們並無假設對稱,但代入初猜値之 後都收斂到對稱的變形,因此我們推論此變形實際上是對稱的。
第四章
振動和穩定性分析
彈性樑為非線性問題,尤其是還受到剛性牆面的拘束,在相同的 受力情況下可能有不只一個平衡解同時存在。在第三章中我們示範了 找出圖 3-1 和 3-2(a)變形的流程。數值分析顯示這些靜態變形的確存 在,但是並不能說這些變形在現實中真的存在。如圖3-2(a)的變形可由 直覺判斷應該存在於現實中,但圖3-1 的變形就很難直接由觀察形狀決 定其穩定性。一個變形只有當其為穩定變形時才存在於現實中。在兩 邊拘束牆面皆為平面的特例中,Ro 和 Chen [8]發展了一套方法,可用 振動法計算出受拘束彈性樑的自然頻率,進而決定各變形的穩定性。
經由適當修正,同樣的方法可以應用在此文章的弧形邊界上。此理論 的重點在於考慮了彈性樑與拘束面的接觸點會隨著振動不停變動,為 了加入此影響,需要將運動方程式由Lagrangian 轉換為 Eulerian 形式。
為了精簡,此章只提到關鍵步驟,流程的細節可參閱Ro 和 Chen [8]。
4.1 在兩接觸面皆為點接觸
首先我們建立圖3-1 接觸點s=s1附近微小元素 ds 的自由體圖,如 圖4-1 所示,F s tx( , )和F s ty( , )分別為 x 和 y 方向的內力。運動方程式包 含了(3.6)-(3.7)式和下列 4 式:
( , )
( , )sin ( , ) ( , ) cos ( , )
x y
M s t
F s t s t F s t s t
s θ θ
∂ = −
∂ (4.1)
( )
21 1 1 2 2
( , ) 1 ( , )
( ) ( )
4
x
x
F s t x s t
R t s s t
s δ η t
π
∂ − − − = ∂
∂ ∂ (4.2)
( )
21 1 1 2 2
( , ) 1 ( , )
( ) ( )
4
y
y
F s t y s t
R t s s t
s δ η t
π
∂ − − − = ∂
∂ ∂ (4.3)
( , ) 2
4 ( , ) s t M s t s
θ π
∂ =
∂ (4.4)
1
Rx 和Ry1為反力R t1( )在 x 方向和 y 方向分量:
1( ) 1( )sin 1
Rx t = −R t φ (4.5)
1( ) 1( ) cos 1
Ry t =R t φ (4.6) (4.1)-(4.3)式為彎矩和 x、y 方向力平衡的結果。(4.4)式為 Euler-Bernoulli 樑模型彎矩和曲率的關係。(4.2)-(4.3)式適用於彈性樑 s=0 至s2之間的 區域。
由於彈性樑與拘束面的接觸點在振動時可能會滑動,如此的話彈 性樑的接觸點可能由 s=s1改變為s= +s1 η1,其中的η1( )t 為一個微小量。
圖 4-2 表示接觸點位置的改變,且在(4.2)-(4.3)式被表示出來,實線和 虛線分別代表接觸點s=s1附近的靜態變形和振動後的位置。虛線上的 點s=s1代表彈性樑在平衡位置時的接觸點。當振動發生後,虛線上的 點s= +s1 η1變成新的接觸點。δ
( )
⋅ 為無因次的脈衝函數。這些方程式可 被稱為Lagrangian 形式的統御方程式,s 則為 Lagrangian 座標上彈性樑 的一個點。(4.2)-(4.3)式中的脈衝函數裡隨時間改變的函數η1( )t 在作受拘束彈
性樑的動態分析時會造成困難。Chen 和 Ro [15]指出若忽略這個小變量 將會產生穩定性預測的錯誤。為了克服這個困難,我們定義一個新的 變數ε1:
1 s 1
ε = −η (4.7)
並將(3.6)-(3.7)式和(4.1)-(4.4)式的靜態解表示為x se( )、 y se( )、θe( )s 、
e( )
M s 、Fxe( )s 、Fye( )s 和R1e,這些靜態解已在 3.1 節被解出。我們假設 ( , )
F s tx 、F s ty( , )、x s t( , )、y s t( , )、θ( , )s t 和M s t( , )的動態解可被表示為靜 態解和一個小擾動的疊加。在一些代數運算之後,動態解可被表示為:
1 1
ˆ ( , )x xe( )
F ε t =F ε + ⎡⎣Fˆ ( )xd ε1 +Rx d1 H
(
ε1−s1)
⎤⎦sinωt (4.8)1 1
ˆ ( , )y ye( )
F ε t =F ε + ⎡⎣Fˆ ( )yd ε1 +Ry d1 H
(
ε1−s1)
⎤⎦sinωt (4.9)1 1 1
ˆ( , ) e( ) ˆd( )sin
x ε t =x ε +x ε ωt (4.10)
1 1 1
ˆ( , ) e( ) ˆd( )sin
y ε t = y ε +y ε ωt (4.11)
1 1 1
ˆ( , )t e( ) ˆd( )sin t
θ ε =θ ε +θ ε ω (4.12)
1 1 1
ˆ( , ) e( ) ˆd( )sin
M ε t =M ε +M ε ωt (4.13) 其中Fˆ ( , )x ε1 t =Fx(ε η1+ 1, )t 。ω為彈性樑的自然頻率。Fxe( )ε1 等符號為靜態 分析所得到的靜態解,只是獨立變數 s 被換成ε1。下標“d”的變數表示 下標“e”靜態解相對應的小擾動。(4.8)-(4.9)中接觸點反力的小擾動Rx d1 和Ry d1 定義為:
1( ) 1 sin 1 1 sin
x e x d
R t = −R φ +R ωt (4.14)
1( ) 1 cos 1 1 sin
y e y d
R t =R φ +R ωt (4.15) (4.7)式所定義的ε1可被稱為Eulerian 座標下彈性樑上的點。
經由 1 1 s ε
∂ =
∂ ,Lagrangian 形式的統御方程式(3.6)-(3.7)、(4.1)-(4.4) 式可被轉換為Eulerian 形式:
1 1
1
ˆ( , ) cos ( , )ˆ x t
ε θ ε t ε
∂ =
∂ (4.16)
1 1
1
ˆ( , ) sin ( , )ˆ y t
ε θ ε t ε
∂ =
∂ (4.17)
1
1 1 1 1
1
ˆ ( , ) ˆx( , )sin ( , )ˆ ˆy( , ) cos ( , )ˆ
M t
F t t F t t
ε ε θ ε ε θ ε
ε
∂ = −
∂ (4.18)
( )
21 1
1 1 1 2 2
1
ˆ ( , ) 1 ˆ( , )
( ) 4
x
x
F t x t
R t s
t
ε δ ε ε
ε π
∂ − − = ∂
∂ ∂ (4.19)
( )
21 1
1 1 1 2 2
1
ˆ ( , ) 1 ˆ( , )
( ) 4
y
y
F t y t
R t s
t
ε δ ε ε
ε π
∂ − − = ∂
∂ ∂ (4.20)
1 2
1 1
ˆ( , )t 4 ˆ( , )
M t
θ ε π ε
ε
∂ =
∂ (4.21)
其中(4.19)和(4.20)式中的脈衝函數在 Eulerian 形式之下對時間是獨立 的。將(4.8)-(4.15)式以及下式:
1( )t 1dsin t
η =η ω (4.22)
同時代入(4.16)-(4.21)式中,並忽略高階項,我們可得到下列六個函數
ˆ ( )d 1
x ε 、yˆ ( )d ε1 、θ εˆ ( )d 1 、Mˆ ( )d ε1 、Fˆ ( )xd ε1 和Fˆ ( )yd ε1 所組成的線性方程式:
1
1 1
1
ˆ ( )d ˆ ( )sin ( )d e dx
d
ε θ ε θ ε
ε = − (4.23)
1
1 1
1
ˆ ( )d ˆ ( )cos ( )d e dy
d
ε θ ε θ ε
ε = (4.24)
1 2
1 1
ˆ ( )d 4 ˆd( )
d M
d
θ ε π ε
ε = (4.25)
( )
1
1 1 1 1 1 1
1
ˆ ( )d xe( ) ( )ˆd ˆyd( ) y d cos e
dM F F R H s
d
ε ε θ ε ε ε θ
ε =⎡⎣ − − − ⎤⎦
+⎡⎣Fye( ) ( )ε θ ε1 ˆd 1 +Fˆxd( )ε1 +Rx d1 H
(
ε1−s1)
⎤⎦sinθe (4.26)[ ]
1 2
1 1 1
2 1
ˆ ( ) 1
ˆ
cos ( ) ( )
4
xd
e d d
dF x
d
ε ω θ ε η ε
ε = π − (4.27)
[ ]
1 2
1 1 1
2 1
ˆ ( ) 1 sin ( ) ˆ ( ) 4
yd
e d d
dF y
d
ε ω θ ε η ε
ε = π − (4.28)
(4.23)-(4.28)式適用於0< <ε1 s2的範圍。
以上式子只需將下標“1”換成“2”,以及一個上標(xˆd)改成兩個上標 (xˆˆd)就可在s=s1到1 的範圍使用。所以引進另一個 Eulerian 座標變數ε2 後:
2 s 2
ε = −η (4.29)
我們可得到另一組類似(4.23)-(4.28)的方程式。
其中s1 <ε2 <1。η2代表在接觸點s=s2的滑動量。在(4.23)-(4.28)式中的 函數xˆ ( )d ε1 、yˆ ( )d ε1 、θ εˆ ( )d 1 、Mˆ ( )d ε1 、Fˆ ( )xd ε1 和Fˆ ( )yd ε1 被另一組不同的函 數xˆˆ ( )d ε2 、yˆˆ ( )d ε2 、θ εˆˆ ( )d 2 、Mˆˆ ( )d ε2 、Fˆˆ ( )xd ε2 和Fˆˆ ( )yd ε2 取代。
4.2 邊界條件
左端A 點的邊界條件為:
1 1
0 ˆ 1
( , )s ( , ) 0
x s t = =x ε t ε=−η = (4.30)
1 1
0 ˆ 1
( , )s ( , ) 0
y s t = = y ε t ε=−η = (4.31)
1 1
0 ˆ 1
( , )s t s ( , )t 0
ε η
θ = θ ε
= =− = (4.32)
這三個邊界條件可被線性化為下列形式:
1 1
1 0 1 0 1
ˆ ( )d cos ( )e d
x ε ε= = θ ε ε= η (4.33)
1 1
1 0 1 0 1
ˆ ( )d sin ( )e d
y ε ε= = θ ε ε= η (4.34)
1 1
2
1 0 1 0 1
ˆ ( )d 4 Me( )ε d
θ ε ε π ε η
= = = (4.35)
B 點線性化後的邊界條件可由相同方法導出:
2 2
2 1 2 1 2
ˆˆ ( )d cos ( )e d
x ε
ε ε θ ε =η
= = (4.36)
2 2
2 1 2 1 2
ˆˆ ( )d sin ( )e d
y ε
ε ε θ ε = η
= = (4.37)
2 2
2
2 2 1 2
1
ˆˆ ( )d 4 Me( ) d
ε ε
θ ε π ε = η
=
= (4.38)
4.3 接觸條件
振動期間彈性樑總是與頂面和底面保持接觸並允許無摩擦滑動。
點
s = s
1的接觸條件為:1 1
1 1 1 1 1 1
1 ˆ
ˆ
( , ) ( , ) sin ( , )
2 s
s s s
x s t = +η =x ε t ε= = −e−ρ θ ε t ε= (4.39)
1 1
1 1 ˆ 1 1 1 ˆ 1
( , )s s ( , ) s (1 cos ( , )) s
y s t = +η =y ε t ε= = −h ρ − θ ε t ε= (4.40)
1 1
1cos ( , )ˆ 1 1sin ( , )ˆ 1 0
x y
s
R t R t
θ ε θ ε ε
⎡ + ⎤ = =
⎣ ⎦ (4.41)
線性化之後,這三式可表為:
1 1 1 1
1 ˆ 1 1
ˆ ( )d s d( ) cos ( )e s
x ε ε= = − ⎣ρ θ ε⎡ θ ε ⎤⎦ ε= (4.42)
1 1 1 1
1 ˆ 1 1
ˆ ( )d s d( )sin ( )e s
y ε ε= = − ⎣ρ θ ε⎡ θ ε ⎤⎦ ε= (4.43)
1 ˆ ( )cos ( )1 1 1 sin ( )1
y e d e y d e
R θ ε θ ε R θ ε
⎡ + −
⎣
1 1
1 ˆ ( )sin ( )1 1 1 cos ( )1 0
x e d e x d e
s
R R
θ ε θ ε θ ε ε
⎤ =
+ ⎦ = (4.44)
點s=s2的接觸條件為:
2 2
2 2
ˆˆ 2
( , )s s ( , ) 0
s
y s t η y t
ε ε
= + = = = (4.45)
2 2
2 2
ˆˆ 2
( , )s s ( , ) 0
s
s t η t
ε
θ = + θ ε
=
= = (4.46)
這兩個條件不需線性化,可直接改寫為:
2 2
ˆˆ ( )d 2 0
s
y ε ε
= = (4.47)
2 2
ˆˆ ( )d 2 0
ε s
θ ε
=
= (4.48)
4.4 ε1與ε2座標間的轉換
我們定義了兩個Eulerian 座標:ε1和ε2。函數可同時表示為ε1或ε2的 形式。舉例來說:圖 3-1 在底部平面的接觸點可被定義為ε2 =s2或是
1 s2 2 1
ε = +η η− ,此點的旋轉角度可表示為:
2 2 1 2 2 1
2 2
2 1
ˆˆ ˆ
( , )s s ( , ) ( , )
s s
s t η t t
ε η η
ε
θ = + θ ε θ ε
= + −
=
= = (4.49)
接著我們在靜態解上加上一個微小簡諧擾動,(4.49)式可寫為:
2 2
2 2
2 ˆˆ 2
( ) ( ) sin
e s d
s ε t
ε
θ ε = θ ε ω
=
+ =
1 2 2 1 1 2 2 1
1 ˆ 1
( ) ( ) sin
e ε s η η d s t
ε η η
θ ε = + − θ ε ω
= + −
+ (4.50)
接著將(4.50)式等號右邊的函數θ ε( )與θ εˆ ( )對ε =s 作泰勒級數展開
並線性化可得到ε1=s2時θ εˆ ( )d 1 與θ εˆˆ ( )d 2 之間的轉換:
2 2
ˆˆ ( )d 2 ε s
θ ε
=
=
( )
1 2
1 2
1 2 1
1
ˆ ( )d e d d
s
s
ε ε
θ ε θ η η
ε
= =
+∂ −
∂ (4.51)
ˆ ( )d 1
θ ε 只在0≤ ≤ε1 s2的範圍被定義,當材料點超過s2就必須改用θ εˆˆ ( )d 2 。 用同樣的方法xˆˆd、yˆˆd、Mˆˆd、Fˆˆxd和Fˆˆyd可被表示為類似的式子。
4.5 求解方法
ω在(4.27)-(4.28)式中只以ω2形式出現過。因此,如果特徵値ω2是 正的,它所對應的變形為穩定且頻率為ω。另外,若ω2為負值則表示 此平衡位置為不穩定。我們使用shooting method 求特徵値ω2的解。首 先給定
1 1 0
ˆ ( )d M ε ε
= =1,並猜測八個變數
1 1 0
ˆ ( )xd F ε ε
= 、
1 1 0
ˆ ( )yd F ε ε
= 、Rx d1 、Ry d1 、
2
Ry d、η1d、η2d和ω2。如同一個初始值問題,我們可對xˆd、yˆd、θˆd、Mˆd、
ˆxd
F 和Fˆyd六條齊性微分方程式(4.23)-(4.28)從ε1 =0積分到ε1=s2。在A 端 的三個邊界條件(4.33)-(4.35)式提供了所需的初始條件。根據類似(4.51) 式的轉換式,當ε1=s2時,
1 2
ˆ ( )d 1 s
x ε ε= 、
1 2
ˆ ( )d 1 s
y ε ε= 、
1 2
ˆ ( )d 1 ε s
θ ε = 、
1 2
ˆ ( )d 1 s
M ε ε
= 、
1 2
ˆ ( )xd 1 s
F ε ε
= 和
1 2
ˆ ( )yd 1 s
F ε ε
= 的 値 可 被 用 來 計 算
2 2
ˆˆ ( )d 2 s
x ε ε
= 、
2 2
ˆˆ ( )d 2 s
y ε ε
= 、
2 2
ˆˆ ( )d 2 ε s
θ ε
=
、
2 2
ˆˆ ( )d 2 s
M
ε
ε
=
、
2 2
ˆˆ ( )xd 2 s
F
ε
ε
=
和
2 2
ˆˆ ( )yd 2 s
F
ε
ε
=
。從ε2 =s2到ε2 =1的積分,
ε2取代ε1作為新的獨立變數。利用ε2 =1的三個邊界條件(4.36)-(4.38) 式 、ε1 =s1 的 三 個 接 觸 條 件(4.42)-(4.44) 和 ε2 =s2 的 兩 個 接 觸 條 件 (4.47)-(4.48)式來檢查猜測的準確性。我們使用 Newton-Raphson method
改善猜測值。
將上述的系統視為由八個非線性方程式與八個未知數所組成:
1 1 2 3 4 5 6 7 8
2 1 2 3 4 5 6 7 8
3 1 2 3 4 5 6 7 8
4 1 2 3 4 5 6 7 8
5 1 2 3 4 5 6 7 8
6 1 2 3 4 5 6 7 8
7 1 2 3 4 5 6 7 8
( , , , , , , , ) 0 ( , , , , , , , ) 0 ( , , , , , , , ) 0 ( , , , , , , , ) 0 ( , , , , , , , ) 0 ( , , , , , , , ) 0 ( , , , , , , , f u u u u u u u u f u u u u u u u u f u u u u u u u u f u u u u u u u u f u u u u u u u u f u u u u u u u u f u u u u u u u u
=
=
=
=
=
=
8 1 2 3 4 5 6 7 8
) 0 ( , , , , , , , ) 0 f u u u u u u u u
⎧⎪
⎪⎪
⎪⎪
⎨⎪
⎪⎪
⎪ =
⎪ =
⎩
(4.52)
其中
1
1
1 1 0
2 1 0
3 1
4 1
5 2
6 1
7 2
2 8
ˆ ( ) ˆ ( )
xd
yd
x d
y d
y d
d
d
u F
u F
u R
u R
u R
u u u
ε
ε
ε ε
η η ω
=
=
⎧ =⎪
⎪ =⎪
⎪ =
⎪⎪ =
⎨⎪ =
⎪⎪ =
⎪ =
⎪⎪ =
⎩
(4.53)
(4.53)式代表八個未知數。而八個非線性方程式:
2 2
2 2
2 2
1 1 1 1
1 1 1 1
1 2 1 2 1 2
2 2 1 2 1 2
2
3 2 2 1 2
1
4 1 1 1
5 1 1 1
6 1
ˆˆ ( ) cos ( ) 0
ˆˆ ( ) sin ( ) 0
ˆˆ ( ) 4 ( ) 0
ˆ ( ) ˆ ( ) cos ( ) 0
ˆ ( ) ˆ ( )sin ( ) 0
ˆ
d e d
d e d
d e d
d s d e s
d s d e s
y e d
f x f y
f M
f x f y
f R
ε ε
ε ε
ε ε
ε ε
ε ε
ε θ ε η
ε θ ε η
θ ε π ε η
ε ρ θ ε θ ε
ε ρ θ ε θ ε
θ
= =
= =
= =
= =
= =
= − =
= − =
= − =
⎡ ⎤
= + ⎣ ⎦ =
⎡ ⎤
= + ⎣ ⎦ =
=
1 1
2 2
2 2
1 1 1 1
1 1 1 1 1
7 2
8 2
( ) cos ( ) sin ( )
ˆ ( )sin ( ) cos ( ) 0 ˆˆ ( ) 0
ˆˆ ( ) 0
e y d e
x e d e x d e
s
d s
d
s
R
R R
f y f
ε
ε
ε
ε θ ε θ ε
θ ε θ ε θ ε
ε θ ε
=
=
=
⎧⎪
⎪⎪
⎪⎪
⎪⎪
⎪⎪
⎪⎨
⎪ ⎡
⎪ ⎣ + −
⎪⎪ + ⎤⎦ =
⎪⎪
= =
⎪⎪
⎪ = =
⎪⎩ (4.54) 疊代未知數的方法為:
1 [ ]1
i+ = i− i − i
u u J f (4.55)
其中u={ , , , , , , , }u u u u u u u u1 2 3 4 5 6 7 8 T,f ={ , , , , , , , }f f1 2 f3 f4 f5 f6 f7 f8 T,J為Jacobian matrix。(4.55)式也可寫成以下形式:
1 1 1
1 1 2 8
1 1 1
2 2 2
2 2 2
1 2 8
8 8 8
8 8 8
1 2 8
i
i i i
f f f
u u u
u u f
f f f
u u f
u u u
Inverse
u u f
f f f
u u u
+
∂ ∂ ∂
⎡ ⎤
⎢∂ ∂ ∂ ⎥
⎢ ⎥
⎧ ⎫ ⎧ ⎫ ⎧ ⎫
∂ ∂ ∂
⎢ ⎥
⎪ ⎪ ⎪ ⎪ ⎪ ⎪
⎪ ⎪ =⎪ ⎪ − ⎢∂ ∂ ∂ ⎥ ⎪ ⎪
⎨ ⎬ ⎨ ⎬ ⎢ ⎥ ⎨ ⎬
⎪ ⎪ ⎪ ⎪ ⎢ ⎥ ⎪ ⎪
⎪ ⎪ ⎪ ⎪ ⎢ ⎥ ⎪ ⎪
⎩ ⎭ ⎩ ⎭ ⎢∂ ∂ ∂ ⎥ ⎩ ⎭
⎢∂ ∂ ∂ ⎥
⎣ ⎦
"
"
# # #
# # % #
"
(4.56)
至於(4.56)式中的偏微分項,計算的方法為:
[ ]
1 1 1 2 3 8 1 1 2 3 8
1
( , , , , ) ( , , , , ) / 2
f f u u u u f u u u u
u ε ε ε
∂ = + − −
∂ " " (4.57)
其中ε代表微小量,而其他的偏微分項也是依照類似的方法計算。則可 利用此方法求解特徵值ω2來判斷其穩定性。
4.6 頂面為線接觸
圖3-2(a)線接觸變形的線接觸部分承受相同大小的均佈正向力。在 振動分析中我們把此種變形當作兩點接觸變形,假設線接觸段沒有均 佈力,兩接觸點ε1 =s1和s2的接觸條件類似於(4.42)-(4.44)式。在 shooting method 中,首先設
1 1 0
ˆ ( )d M ε ε
= =1,並猜測九個變數
1 1 0
ˆ ( )xd F ε ε
= 、
1 1 0
ˆ ( )yd F ε ε
= 、
1
Rx d、Ry d1 、Rx d2 (圖 3-1 變形沒有的未知數)、Ry d2 、η1d、η2d和ω2。我們 可以對xˆd、yˆd、θˆd、Mˆd、Fˆxd和Fˆyd的六條式子(4.23)-(4.28)從ε1 =0積分 到ε1=s2 。 九 個 條 件 被 用 來 檢 查 積 分 的 準 確 性:ε2 =1的 邊 界 條 件 (4.36)-(4.38)式、ε1 =s1和ε2 =s2的接觸條件(4.42)-(4.44)式。在得到解之 後必須檢查模態圖是否有違反牆面拘束,若模態圖在振動時超出牆 面,那這個模態是無效且無法使用的。
第五章
彈性樑的變形軌跡圖
5.1 凹面(Concave wall)
圖5-1 為頂部受凹面拘束彈性樑的變形軌跡圖。凹面的曲率半徑ρ 為 5,彈性樑在接觸凹面前之初始形狀的中點高度為 0.1,端點移動量 e 為 0.025。圖 5-1 中的Δh代表頂部牆面向下的移動量,N 代表要產生
Δh需要給頂部牆面的外力。圖中的實、虛線分別代表穩定和不穩定的 變形,各軌跡對應的變形標示在圖的下方。
在說明變形軌跡圖前,我們先解釋如何描述變形:我們定義 fold 為 從一牆面到另一牆面間的彈性樑線段,所以圖3-1 的變形有兩個 folds。
而開始到結束都在同一牆面的為free fold,所以圖 3-1 的變形有一個 free fold。有些變形有線接觸段,舉例來說:圖 3-2 的變形有兩個 folds 和一 段線接觸。
彈性樑一開始以中點與頂面接觸(變形 1,a 點和 b 點之間)。在 b 點,一點接觸的變形開始轉變為一線接觸(變形 2)。彈性樑在變形 1 和 2 對底面並無接觸。 當頂面繼續往下壓,變形 2 在 c 點演變為變形 3-1,
除了在頂面的線接觸,彈性樑在底面的兩端也產生線接觸。我們將變 形3 的軌跡用 e 點分為 3-1 和 3-2。
圖5-2 為沿著軌跡 1、2、3-1 和 3-2 ω2的變化。在b 點和 c 點附近 的ω2曲線在插圖中加以放大。當Δh小的時候,最低的兩個自然頻率互 相接近然後匯合於b 點。在變形 1、2 和 3-1 中,所有的ω2皆為正。另 一方面,在變形3-2 至少有一個ω2是負的。在圖5-2 靠近 e 點處有一條 接近垂直的ω2曲線,在e 點右側會變為負的,所以我們得到變形 1、2 和3-1 是穩定,而變形 3-2 是不穩定的。
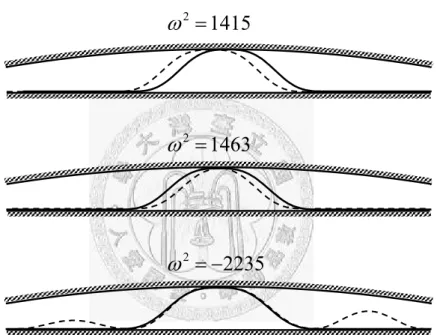
圖 5-3 為當Δ =h 0.037(e 點右邊一點),圖 5-2 中軌跡 3-2 線接觸變 形的前三個模態圖,實線和虛線分別代表靜態變形和振動模態。其中 對應最低ω2 = −2235的模態從底面發生挫曲而頂面還是保持線接觸,第 二和第三模態分別為對稱及反對稱的模態。
根據穩定性的預測,彈性樑會在e 點從線接觸變形跳到變形 4,軌 跡4 在垂直切線處有極點。軌跡 17 也有類似情況,只是極點上方不穩 定部分很小。軌跡4 和軌跡 5(在 d 和 e 間不穩定)在 d 點交會。當Δh持 續增加,變形4 在 f 點演變為變形 7,此時變形 4 的 free fold 接觸到頂 部牆面而且外力 N 下降到零。Δh繼續增加到g 點,在底部兩端開始出 現線接觸(變形 8-1)。當Δh達到i 點,彈性樑會跳到變形 11,其為與頂 面三點接觸和底面兩點接觸的變形。當Δh達到 k 點,彈性樑轉變為變 形12-1,在此變形中底面兩端產生線接觸,彈性樑在軌跡到達 i 點時跳 至變形16。
從f 點開始,變形 7 的點接觸變形在 g 點轉為變形 8 的線接觸變形。
這個情況與變形 1 到 2 的演變不同,因為變形 7 到 8 的變形無頂面線 接觸。我們計算變形 7 和 8 的ω2發現,它並沒有像圖 5-2 一樣匯合,
變形 11 到 12 和變形 15 到 16 的情況與變形 7 到 8 類似,所以最低兩 個頻率會匯合的現象只有在變形1 到 2 的時候才會發生。
軌跡17(含極點,介於 p 和 f 間)和 18 (不穩定,p 點以上)在 p 點相 接。軌跡17 在接近 p 點的垂直切線處有極點,極點以上不穩定的部份 很小(圖中觀察不到)。極點以下的部份為穩定,不過在實驗中並不會自 然發生,除非人為加以調整。軌跡19(不穩定,介於 q 和 s 間)和 20(不 穩定,介於q 和 r 間)在 q 點相接。s 點的叉號表示軌跡 19 的終點,超 過此點後變形19 就不再存在,因為其在頂部凹面點接觸的反力會變為 拉力。軌跡21(含極點,在 u 和 t 間)和 23(不穩定,u 點以上)在 u 點相 接。軌跡22(含極點,在 v 和 w 間)和 24(不穩定,w 點以上)在 w 點相 接。軌跡9(含極點,介於 j 和 h 間)和 10 (不穩定,h 點以上)在 h 點相 接。軌跡13(含極點,介於 n 和 m 間)和 14 (不穩定,m 點以上)在 m 點 相接。以上變形皆含有 free folds,它們在數學上存在,但在現實中卻 很少自然發生,即使其中有些變形為穩定。
我們比較圖5-1 中的 f、j 和 n 點,在這三個點,含有 free fold 的變 形(4、9 和 13)開始接觸到牆面。三點中,只有 f 點對應的外力 N 為零,