行政院國家科學委員會專題研究計畫 成果報告
行人運動模式的信號量測與定位應用 研究成果報告(精簡版)
計 畫 類 別 : 個別型
計 畫 編 號 : NSC 97-2221-E-011-079-
執 行 期 間 : 97 年 08 月 01 日至 98 年 09 月 30 日 執 行 單 位 : 國立臺灣科技大學機械工程系
計 畫 主 持 人 : 高維文
計畫參與人員: 碩士班研究生-兼任助理人員:陳倫彬 碩士班研究生-兼任助理人員:林子閔 碩士班研究生-兼任助理人員:陳呈羽
報 告 附 件 : 出席國際會議研究心得報告及發表論文
處 理 方 式 : 本計畫可公開查詢
中 華 民 國 99 年 04 月 25 日
行政院國家科學委員會補助專題研究計畫 ■ 成 果 報 告
□期中進度報告 行人運動模式的信號量測與定位應用
計畫類別:■ 個別型計畫 □ 整合型計畫 計畫編號:NSC 97-2212- E-011-079-
執行期間:2008 年 8 月 1 日至 2009 年 10 月 31 日
計畫主持人:高維文 共同主持人:
計畫參與人員:
成果報告類型(依經費核定清單規定繳交):■精簡報告 □完整報告
本成果報告包括以下應繳交之附件:
□赴國外出差或研習心得報告一份
□赴大陸地區出差或研習心得報告一份
■出席國際學術會議心得報告一份
□國際合作研究計畫國外研究報告書一份
處理方式:除產學合作研究計畫、提升產業技術及人才培育研究計畫、
列管計畫及下列情形者外,得立即公開查詢
□涉及專利或其他智慧財產權,□一年□二年後可公開查詢 執行單位:國立臺灣科技大學機械系
中 華 民 國 98 年 4 月 15 日
摘要
個人的定位應用才方興未艾,將繼汽車導航技術之後成為下一世代的重要科技。本計 畫專注於如何以感測器量測人體的運動特性,判別人體在室內環境的運動模式(如平面行 走或上下樓梯等),更進ㄧ步以量測信號希冀能推導出人體行動後的位置。
由於人體運動的複雜性,一般感測器量取的信號有許多的不確定性。本計畫的首要目 標是找出適當的感測器並架構適當的安裝方式,同時先以無安裝誤差的環境下先找出量測 信號與運動特性的相關性及感測器誤差所造成的可能影響。由於一般的感測器誤差均隨時 間環境而變,唯有不斷的修正感測器誤差才能保有合理的量測效能,因此本計畫另一個重 點是針對人體的運動特性提出感測器誤差的修正方式。最後,由於感測器在人體上的佩戴 將隨不同人有很大的變異,裝置上的誤差將產生極大的姿態偏差,因此在感測器整合法則 部分探討如何利用個人行動過程中的特質,例如較大的動態範圍使感測器偏差的影響減 少、較頻繁的動作間斷使感測器有較多機會能做零速修正、以及感測器彼此間可互相校正 等可能均為個人定位感測器整合可資利用的一些方法以提升定位功能。在使用的感測器方 面,我們使用加速規、電子羅盤、陀螺儀、氣壓高度計等在個人定位使用的特性,以設計 適當的定位方法。
本計畫運用過去在不同載具定位應用的 MEMS 感測器的整合經驗,完成一套針對人身 運動在位置與姿態均有效的感測器整合運算法則。
關鍵詞:行人定位, 方位推估法, 加速規, 磁羅盤, 陀螺儀, 感測器校正
Abstract
Pedestrian positioning and navigation is going to emerge as the next popular navigation application following vehicle navigation systems. In this project we focus on using MEMS sensors to measure human body motions under maneuvers including horizontal surface walking or climbing upstairs and downstairs motions. Using the sensor measurements the human body position can then be deduced.
Due to the complexity of human kinematics compared with vehicle motions, there are a lot of uncertainties in the sensor measured signals. The first objective of this project is to find suitable sensors and their corresponding mounting positions in the human body for positioning purpose. Under the situation of perfect sensor alignment, the relationship between the sensor measurements and the human motions are studied and errors due to sensor parameter change are modeled. As the sensor parameters varies with times and environments, continuous sensor calibration is necessary to guarantee the positioning performance. For this reason, the next objective of the project is to propose suitable sensor calibration algorithms for pedestrian positioning applications. Finally, as sensors wear by human beings are subjected to misalignment errors caused by different wearing method and different person, some characteristics of pedestrian navigations, such as larger sensor dynamic range resulting less effects from sensor bias, frequent ZUPT enabled by more frequent motion interrupts during human kinematics, and calibration algorithms between sensors are explored to help come up with suitable sensor integration algorithms. Properties of MEMS sensors, including magnetic compass, gyroscope, accelerometer, and barometer with applications in pedestrian navigation are studied and suitable positioning system architecture are proposed
.
This project apply the extensive MEMS sensors integration experiences obtained in the past projects on pedestrian navigation applications. Suitable sensor integration algorithm for both the positioning and attitude determination problems of pedestrian navigation are developed.
Keywords: Pedestrian Navigation, Dead-Reckoning, Accelerometer, Magnetic Compass, Gyroscope, Sensor Calibration
一、前言
近年來由於 GPS(全球衛星定位系統)接收器的商業化,使導航設備已經廣泛的應用。
在汽車導航已經成為日常生活中普便的應用後,許多業者也開始將目光轉向個人定位與導 航這項應用。在個人導航應用開始成為熱潮的現在,其實許多廠商忽略了個人定位所需面 臨的技術挑戰。根據一位美國學者 Smith 於 1993 年統計研究顯示,人類一天待在室內的時 間約佔全部時間的 89%,顯示人類日常生活處於室內環境的時間遠遠大於室外。由於人所 活動的範圍大多在樹蔭、騎樓下或室內,因此造成衛星被遮蔽或脫鎖的情況常常發生,所 以 GPS 的可依賴性相對降低。要完全仰賴 GPS 希望能涵蓋個人定位的需求幾乎是沒有可 能,甚至有許多時候 GPS 完全無法有任何貢獻。因此許多導航系統的研究集中於利用感測 器輔助 GPS 定位以提升其定位功能的領域。本計畫主要目的即希望使用感測器量測人體步 行運動的特性以協助後續的定位應用。
二、研究目的
在量測人體運動的感測器選擇上,本計畫選擇使用加速度計量測位移量(包含水平移 動與上下距離),電子羅盤量測行進方向與感測器姿態,另外氣壓高度計量取高度。由於人 體運動有許多不可預測的雜訊,因此加速度計量測的信號很難直接積分得到位移量。在過 去的研究裡有人曾利用加速規信號判斷步伐,再直接乘以固定步伐長度得到位移,但此種 方式與使用計步器無異,似乎浪費了加速度計可量出的細微信號內容,因此本計劃將透過 信號分析的上先了解步行時的加速度量測與人體運動的關係,在試圖由中找出信號與步伐 大小的相關性。另外感測器由於本身設計的限制,誤差常受環境影響須經常校正才能保持 效能。如果我們觀察個人行動的特性,可以發現人的動作與動作中其實常有經常性的停止。
這個特性使得感測器經常有機會在運動停止時,藉由靜止的一些特性進行所謂的零速修正
(Zero velocity UPdaTe, 又稱 ZUPT),以修正或抑制慣性感測器常有的量測偏移現象。
本計畫探討以下子題:
1. 感測器人身不同安裝位置的信號特性,並決定以腰間安裝感測器作為研究的平台。
2. 探討前向加速規量測之加速度與行人步行步伐距離間的關係,並瞭解如何以人體運動 的特性在踏地瞬間進行速度與距離之校正。
3. 探討垂直加速度與行人步行距離間的關係,並比較何者更適合步伐之量測。
4. 由於三維電子羅盤量測之方位角受到人體姿態的影響,因此利用靜態之三維加速規量 測判斷姿態以改善方位角之量測。
5. 測試其他感測器包含陀螺儀與氣壓計在一般行人運動之性能以作為後續改善運動量測 之參考。
三、文獻探討
在行人的室內導航定位這類領域已經有許多研究學者深入研究,較常見的定位方式大 致分為兩個方向,其一是使用慣性感測器,由感測器的量測而得到人體本身運動之物理量,
如加速度及角速度等,進而推得移動後的位置,這類方法具有相當自主性、定位平台簡單 而且不易受到環境限制影響等的優點;另一類則是使用無線通訊如 RFID 與 WiFi 等等,藉 由環境基地台與使用者佩帶的標籤(tag)連線後,利用傳輸訊號的強弱而推得每個基地台與
使用者的距離,經過整合後可直接定位出使用者之位置,此方法精準度較高且無累積誤差 之缺點。
感測器方面,Koichi 和 Hikaru 與 Tadashi 使用加速儀搭配氣壓計訊號辨識人體步行特 徵與上下樓,之後並計算出步行直線與垂直距離[2][3];Lee 和 Mase 則是使用雙軸加速儀 透過 Auto-correlation 和 Cross-correlation 來辨識上下樓之步行訊號[5];Cho 和 Park 單純僅 使用加速儀量測人體步行直線距離[1];Kim 和 Jang 分析人類步行加速度的訊號,推得加速 度與步伐大小之通式且利用加速儀與電子羅盤分別偵測步伐數與角度的變化[4][6];Lauro 和 Johann 將慣性感測器(陀螺儀與加速規)放置於鞋子的側面,以量測人步行的速度以及方 位,其中應用 ZUPT(Zero Velocity Update)的觀念來校正加速規飄移現象,對於陀螺儀誤差 校正則是提出使用電子羅盤輔助校正[10]。
在無線模組方面:G.Retscher 利用 GNSS 與 WiFi 以及氣壓計來進行室內定位[7];Shohei 和 Masami 則是利用 RFID 來校正慣性感測器並整合 GPS 以達到室內室外整合的定位系統。
四、研究方法
4.1 感測器安裝位置
對於個人定位而言,人體的運動常隨時改變,也因此可能需要有不同的量測範圍。不 同的安裝位置也會影響量測的範圍(因可能量測人身不同部位的動作)。下圖為三維加速度 感測計安裝於不同部位之量測信號:
a. 安裝於手腕之量測信號 b. 安裝於胸前之量測信號
c. 安裝於腰側之量測信號 d. 安裝於腰前之量測信號 圖 1. 不同感測器安裝位置量測結果
雖然乍看之下各信號大同小異,但其實除垂直加速度(藍線)因均對應行走時的上下 震動故有些相似外,其餘兩平面軸加速度量測可說完全不同。本計劃將感測器放置於人體 腰部中間的位置,主要考量其他部位如手腕可能運動量依人而異且分歧過多,胸前不易佩 戴,腰側則較易受側向運動(如扭腰)影響。,實際佩帶位置如圖 2
圖 2、感測器放置位置圖
4.2 人類步行運動分析
人類每一步伐可分為三個階段,如圖 3 所示:
第一階段:當跨出一個步伐時,主軸(左)腳的腳跟就由貼近地面變成離開地面,然後身體上 半部會移動一段距離。
第二階段:擺動(右)腳往前跨步,身體同樣被往前帶一段距離,接著擺動(右)腳的腳跟會先 接觸到地面。
第三階段:最後主軸(左)腳的腳尖離開地面往前擺動,同時擺動(右)腳由腳間接觸地面變成 整個腳掌接觸著地面。
此時,擺動(右)腳又要與主軸(左)腳交換,周而復始地進行重複循環,直到步行運動結束。
第一階段 第二階段 第三階段 第一階段 第二階段 第三階段
圖 3、步行運動分析示意圖
圖 4 為進行步行測試後得到的加速度訊號結果圖,測試步行者身步行 3.6 公尺直線所 量測出的加速度圖,步伐數為 6 步。
圖 4、加速儀量測步行訊號結果圖
圖 4 前進加速度訊號可清楚有一定規律性的輪廓圖(pattern)如圖 5 所示。
時間 (sec)
加速度
第一階段 第二階段 第三階段
時間 (sec)
加速度
第一階段 第一階段 第二階段 第三階段
圖 5、單步伐之前進加速度輪廓示意圖
可看出步行開始有輕微的下降趨勢(加速度以前進方向為正,步行時因慣性關係使得 MEMS 內部質量向後移動,故量到負的訊號),這就是前述第一階段身體往前些微移動所量測到的 訊號;接著有較陡下降直到谷底,其代表第二階段擺動(右)腳擺動帶動身體往前大幅度移 動之訊號;緊接出現最峻峭的上升訊號,是擺動(右)腳腳跟接觸地面所量測到的減速訊號;
過波峰後下降訊號則是第三階段主軸(左)腳腳尖離地而擺動(右)腳腳尖接觸地面所帶出的 前進訊號。
4.3 前向加速訊號與步伐關係
理論上前向加速度積分二次後可得前向位移量即為步伐長度,但實際上因為加速規無 法感測行路時因身體接觸地面產生的震動,因此會損失高頻的量測連帶使二次積分位移尚 須乘上一固定之比例因子。實驗證明此比例因子可能因不同感測器而不同。以本計畫使用 之 Kionix KXR94 三維加速規之因子大約為 1.73。另外,加速規因常有飄移偏差,且每一步 伐可能不同,若無法修正亦導致所的步伐產生誤差。本計畫另提出兩種修正誤差的方法:
1. 規律性落地速度校正:將前向加速度直接積分後可得圖 6 之單步速度與步行 4 米之位移 結果,圖中可輕易看出角度落地之速度因加速信號飄移的影響可達 1.8m/s,顯然不符合 實際情況,若不修正此項誤差則計算出之累積步伐可達近 6 米。
圖 6、加速儀量測直線之速度與位移圖
依照[12]提出的實驗結果,歸納出實際行人步行時每一步落地速度應該相同,其 結果如圖 7 所示。
圖 7、影像分析單步步伐速度結果圖擷(節錄自[12])
藉由此微小關係並且搭配加速儀短時間量測精準度,利用每一段步行第一步速度 校正後續每一步的速度,抑制長時間量測發生的發散現象。校正結果如圖 8。可 看出利用此原則移除加速信號飄移後,無論單步速度或累積位移均接近實際狀 況。
圖 8、規律性校正後之速度圖
2. 步伐大小與速度關係:以上之規律性落地速度校正確實能夠有效地抑制加速儀發散現 象,距離量測的誤差也明顯縮小,不過因速度校正之參考速度僅利用每一段第一步伐的 速度,假使第一步速度量測有誤差,後續速度規律性校正將跟著出錯,最後積分得到位 移值也不正確。根據[5]Seon-Woo Lee 和 Kenji Mase 提出步伐大小與步伐速度之關係:
步行速度越快,步伐越大。藉此觀念將步行步伐大小與步行時間記錄下來(如圖 9 的 點),利用二階線性迴歸推出步伐大小和步行速度之關係,如圖 9 實線部分。往後只要 將加速儀量測到的第一步步伐間距時間帶入方程式中,即可推得第一步可能之步伐大 小,藉此達到更強健的直線距離量測。
圖 9、步伐大小與步伐時間關係圖
前向加速儀數據處理流程如圖 10。數據擷取之後,首先使用簡單一階低通濾波將高頻 雜訊濾除;接著藉由門檻值的設定分開站立訊號與步行訊號;下一步則是挑出步行訊號峰 值,此峰值為步行的分隔點,得到之後可推得步伐數以及每個步伐的輪廓(pattern);由於 加速儀量測藏有白色雜訊,故利用每一段步行的步伐平均來消除此段步行每一個步伐的白 色雜訊,當然每個步伐的訊號點數不盡相同,因此須先做步伐訊號數正規化(normalize),
訊號點數設定為 20 點;完成上述步驟並積分得速後,即開始實現校正過程,最終可得到校 正後之直線距離量測值。
圖 10、前向加速儀訊號處理流程圖
經此處理流程的實驗結果如下,實驗路段長為 6.97 公尺,下圖可看出校正前與叫症候 之步伐量測結果。
圖 11、前向加速儀校正過程之訊號圖比較圖
4.4 對地加速訊號與步伐關係
直覺上步行時垂直對地加速度似乎與步伐大小無直接關係,但[13]中提出行走步伐與 對地加速度間有以下之關係式:
K A A
D
4 max
min
其中 D:步行一步的位移
Amax:步行一步的最大對地加速度 Amin:步行一步的最小對地加速度
K:常數,與步行者之腳長度有關。
4.5 陀螺儀方位量測與信號校正
步行轉彎需依賴陀螺儀或電子羅盤量測轉彎量。陀螺儀與電子羅盤有類似之誤差特性
(飄移現象),一般步行時可利用步伐間角速度為零之特性進行陀螺儀飄移量判定。另外本 計畫並使用直線運動進行陀螺儀之偏差校正。
圖 12、陀螺儀偏移特性圖
圖 13、陀螺儀校正偏移量前後之比較 4.6 姿態校正
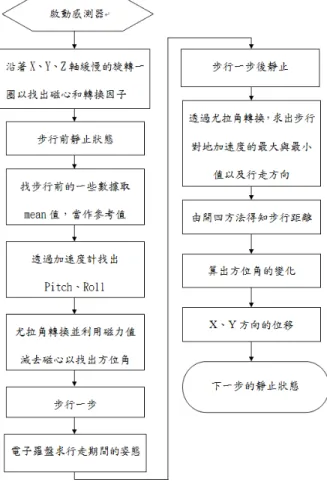
由於慣性感測器置於人身受到人體行動時之肢體運動導致其量測軸隨時變化,因此需 經姿態校正後將加速規量測量旋轉回正確之慣性座標方向始能進行必要運算。本計畫另一 貢獻為加入一三軸電子羅盤與三軸加速規重合,並在行人運動的過程中在踏步瞬間使用重 力量測及電子羅盤數據計算感測器姿態量測。整體之流程如下圖:
圖 14 步行感測器流程圖
五、結果與討論
5.1 前向加速儀直線步伐量測實驗
測試距離分短、中、長等三種不同的距離,驗證確實能夠抑制加速儀長時間發散之現 象。短距離與中距離實驗場地為 T3 教學大樓走廊,長度分別為 6.97 公尺及 22.1 公尺,長 距離實驗場地則為 E1 大樓的走廊,長度 65.6 公尺。加速儀使用規律性校正與規律性搭配 步伐校正量測直線步行距離結果比較如表 1,單純使用規律性校正產生誤差遠大於規律性 搭配步伐校正所產生的誤差,由量測結果隱約可得知中距離的量測準度優於其他兩種量測 距離。
表 1、前向加速儀直線距離量測結果表
測量距離 規律性校正誤差 規律性+步伐校正誤差
短距離 56.87% 3.93%
中距離 45.92% 2.18%
長距離 59.3% 5.11%
5.2 對地加速儀直線步伐測實驗
使用前節所述對地加速儀與步伐長度之實驗公式,並先行量得實驗者對應之 K 參數為 0.53,並在長度 5.4 米的路徑上行走 9 步,每步長度 60 公分,量得對地加速度以公式求得 步伐分別為下表所示:
表 2、對地加速儀直線距離量測結果表 Step Distance(m) Error(%)
1 0.57 -5.00 2 0.56 -6.67 3 0.58 -3.33 4 0.58 -3.33 5 0.52 -13.3 6 0.58 -3.33 7 0.57 -5.00 8 0.58 -3.33 9 0.57 -5.00
5.3 姿態補償實驗
為瞭解加速規在姿態改變下量測產生的影響,我們在 4 步的實驗過程中同時加入大幅 的俯仰角及側滾角的改變,並利用電子羅盤及加速規於每部間停頓時間進行姿態校正。圖 15 顯示姿態校正前後之加速度量測比較。
圖 15 姿態補償前後的加速度值
補償前後的加速度計算之加速度比較如下(正確步伐長度為 0.6 米):
姿態校正前 姿態校正後
步數 步伐 誤差百分比 步伐 誤差百分比
1 0.72 20.00 0.54 -10.00 2 0.68 13.33 0.59 -1.67 3 0.67 11.67 0.55 -8.33 4 0.7 16.67 0.52 -13.33 由此實驗結果可看出姿態誤差對定位結果的影響。
5.4 三維步行軌跡方位推估實驗
三維步行軌跡方位推估實驗使用三維加速規,陀螺儀及氣壓計,實驗過程間盡量不產 生感測器姿態誤差,測試路徑含平面路徑與兩種不同高度樓層的大樓一二樓,如圖 16 的 軌跡所示。直線距離最長為 60 公尺,最短 27.5 公尺,角度包括 90 度與 180 度,北面與東
面二樓的高度經量測後分別為 3.25 公尺及 4.52 公尺。圖 17 為感測器推估軌跡。
圖 16、立體空間步行軌跡實驗場地 (台科大 E1 大樓)
圖 17、立體空間方位推估結果
5.5 結論
本研究利用各種不同感測器研究行人步行運動的特性,並針對三維加速規提出規律性 及步伐校正兩種不同方式校正加速儀訊號,經實驗證明有效提升了步行距離的量測精度。
在步行的方位量測部分本研究使用陀螺儀與電子羅盤,並使用偏移量校正法校正陀螺儀訊 號。另外在高度量測上使用氣壓高度計。綜合了各感測器不同的校正與實驗,二維與三維 空間室內定位而得以實現。
另外,本研究也提出使用加速度計以及電子羅盤處理行走過程間感測器可能遭到的姿 態改變。當然,單憑感測器並無法處理長時間用動後感測器誤差累積的問題,因此未來若 能在行人運動上找到其他可運用的限制條件,或是其他有利的參考訊號如室內無線電定位 輔助慣性感測器量測,並利用非線性狀態估測理論整合不同感測系統的信號達到最佳位置 估測,相信室內定位的位置推估精準度能有更理想的結果
參考文獻
[1] Seong Yun Cho, Chan Gook Park and Gyu In Jee,“Measurement System of Walking Distance Using Low-Cost Accelerometers”, The 4th Asian Control Conference(ASCC), 25-27 Sept. 2002.
[2] Koichi Sagawa, Hikaru Inooka and Yutaka Satoh,“Non-restricted measurement of walking distance”, IEEE International Conference on Systems, Man, and Cybernetics. Volume 3, Page(s): 1847-1852, 8-11 Oct. 2000.
[3] Koichi Sagawa, Tadashi Ishihara, Atsushi Ina and Hikaru Inooka,“Classification of Human Moving Patterns Using Air Pressure and Acceleration”, Proceedings of the 24th Annual Conference of the IEEE Industrial Electronics Society. Volume 2, Page(s): 1214-1219, 31 Aug. - 4 Sept. 1998.
[4] H.-J. Jang, J.W. Kim and D.-H. Hwang,“Robust step detection method for pedestrian navigation system”, Electronics Letters. Volume 43, Issue 14, 5 July 2007.
[5] Seon-Woo Lee and Mase K. , “ Recognition of Walking Behaviors for Pedestrian Navigation”, Proceedings of the IEEE International Conference on Control Applications, Page(s): 1152-1155, 5-7 Sept. 2001.
[6] Jeong Won Kim, Han Jin Jang, Dong-Hwan Hwang and Chansik Park,“A Step, Stride and Heading Determination for the Pedestrian Navigation System ” , Journal of Global Positioning System, Volume 3, No.1-2: 273-279, 2004.
[7] G. Retscher,“Location Determination in Indoor Environments for Pedestrian Navigation”, IEEE/ION Position, Location, and Navigation Symposium, Page(s): 547-555, 25-27 April, 2006.
[8] Arikawa M. and Konomi S. , Ohnishi K. ,“Navitime:Supporting Pedestrian Navigation in the Real World”, IEEE, Pervasive Computing, Volume 6, Issue 3, Page(s): 21-29, July-Sept.
2007.
[9] Gunther Retscher,“Test and Integration of Location Sensors for a Multi-sensor Personal Navigation“, The Journal of Navigation, Volume 60, Issue 1, Page(s): 107-117, Jan. 2007.
[10] Lauro Ojeda and Johann Borenstein,“Non-GPS Navigation for Emergency Responders”, International Joint Topical Meeting: “Sharing Solutions for Emergencies and Hazardous Environments,”February 12-15, 2006, Salt Lake City, Utah, USA, February, 2006.
[11] Rommanee Jirawimut, Piotr Ptasinski, Vanja Garaj, Franjo Cecelja and Wamadeva Balachandran, “ A Method for Dead Reckoning Parameter Correction in Pedestrian Navigation System”, Proceedings of the 18th IEEE Instrumentation and Measurement Technology Conference, Volume 3, Page(s): 209-215, 21-23 May 2001.
[12] 王淑惠,『人類步態轉換過程下肢運動學因子及機械能的探討』,碩士學位論文,成功 大學醫學工程研究所,2004。
[13] Harvey Weinberg, ”Using the ADXL202 in Pedometer and Personal Navigation Applications”, Analog Devices, Inc., 2002.
[14] 劉建良,『感測器於個人定位之步行分析與應用』,碩士學位論文,國立台灣科技大學 機械工程研究所,2008。
[15] 陳倫彬,『加速度計與電子羅盤於行人定位之應用』,碩士學位論文,國立台灣科技大 學機械工程研究所,2009。
計畫成果自評
本計畫探討行人運動的感測器特性,並瞭解現有低價位感測器在量測行人步伐時遭遇 的許多實際問題,但藉由計畫研究成果提出的許多處理方法,可利用行人在行動時不同階 段的運動特性校正感測器誤差,提升定位精度,另外步伐間停頓的感測器資料可偵測感測 器姿態,提供感測器姿態校正以取得較正確的方位角,這些是未來使用感測器量取行人運 動時實用的處理方法。本計畫雖未提出理論的創新,但指出感測器量測人體運動的常見困 難,及對應的處理方式,在應用研究與未來技術發展具備較高的參考價值。
可供推廣之研發成果資料表
■ 可申請專利 ■ 可技術移轉 日期:99 年 4 月 15 日
國科會補助計畫
計畫名稱:行人運動模式的信號量測與定位應用 計畫主持人:高維文
計畫編號:NSC97-2212-E-011-079 學門領域:系統生物研究
技術/創作名稱 行人步行感測量測系統 發明人/創作人 高維文
中文:
本系統利用低價位加速度規及電子羅盤量測一般行人步行運動之 步伐與方向,推估行人行進軌跡,適用於個人定位服務的各項可攜 式消費電子產品在室內無衛星定位下的行人位置決定應用。加速規 信號可判斷運動狀態及步伐大小,並判斷感測器姿態以提升電子羅 盤方位量測。
技術說明 英文:
This system utilize low cost accelerometer and electronic compass sensors to measure the orientations and step lengths of pedestrian motions to determine the human tracks. It is useful to many portable devices in the Location Based Service applications. The
accelerometer signal is used to determine the human motion and step length and also the sensor attitudes to improve the accuracy of orientation determined by E-compass.
可利用之產業 及 可開發之產品
手機,個人導航器,個人定位服務
技術特點
可自動偵測不同運動模式下之位移大小,改善位移精度,並使用三 維電子羅盤配合加速規推估感測器姿態,提升方位角精度,整合後 可得較正確室內行人步行軌跡。
推廣及運用的價值
提昇室內行人運動定位精度,拓展下世代個人定位應用領域
表 Y04
行政院國家科學委員會補助國內專家學者出席國際學術會議報告
99 年 4 月 10 日 報告人姓名
高維文 服務機構
及職稱 國立台灣科技大學機械系副教授 時間
會議 地點
2009.9.22~2009.9.25
Savannah, Georgia, USA
本會核定 補助文號
NSC- 97-2212E011079
會議 名稱
(中文)美國導航學會 2009 全球導航衛星系統年會 GNSS-2009 (英文)ION GNSS-2009
發表 論文 題目
(中文) (英文)
表 Y04
一、參加會議經過
美國導航學會(Institute of Navigation, ION)成立於 1945 年,為美國專注於導航領域之 專業學會,每年舉辦數次不同主題之學術研討會,ION-GNSS 會議為 ION 每年一度主題為衛 星定位與導航系統的會議,亦為全球在此領域的最重要會議。此會議慣例於每年九月份舉行 並每二年更換會議地點,ION-GNSS 2009 年會於 2009 年 9 月 22 日至 25 日於美國喬治亞州 賽凡那市舉行,此次是第二次在賽凡那市舉行(明年將改到奧勒岡州波特蘭市舉行)。此次會 議共有相關領域人士 1216 人參加,除來自美國與加拿大的學術與研究單位外,還包含歐洲、
亞洲等,大陸有 20 位註冊,而台灣僅有 10 位註冊(成大 6 位,台大 1 位,台科大 1 位,聯 發科 2 位)。
除學術會議外,大會並有相關產業儀器設備展覽,許多 GPS 領域的領導廠商過去往往也 選擇在此一盛會發表最新產品與相關技術。近年由於 GPS 商業應用已非常發達,因此較具商 業性的 GPS 相關產品有轉移到 CES,CeBIT 等消費性電子產品展覽的趨勢,但專業的衛星接 收器廠商及國防工業的供應商仍多選擇此一展覽展出產品。
本人於 9 月 22 日晚間經舊金山飛抵賽凡那市,因班機時間因素無法參加 22 日晚間之開 幕式,於 23 日上午開始參加相關之論文研討會。由於導航應用環境的變化,此次會議的相關 議題已不侷限於衛星定位系統之研究,會議分項討論議題如下:
September 23, 2009
Morning Afternoon
A1 GNSS Interference & Spectrum Aspects A2 Military GPS & GPS-INS Integration B1 Multi-sensor Navigation B2a Surveying & Geodesy
B2b Marine Applications C1 GNSS Ground Based Augmentation
Systems (GBAS)
C2 GNSS Space Based Augmentation Systems (SBAS)
D1 Urban & Indoor Navigation Technology 1
D2 Land Based Applications 1 E1 GNSS Simulation and Testing E2 Multipath Effects & Mitigation F1 Galileo Integrity, Multi-constellation
RAIM
F2 Galileo Signal Structure, GPS/Galileo Interoperability
P1 Program Updates (GPS, GLONASS, Galileo, COMPASS, IRNSS, QZSS)
P2 Program Updates: High Integrity Systems
P2b SVN-49 Review Panel September 24, 2009
Morning Afternoon
A3 GNSS Receiver Algorithms 1 A4 Software Receivers
B3 Algorithms for Multi-sensor Fusion 1 B4 Alternatives and Backups to GNSS C3 Next Generation GNSS Integrity C4 Space Applications
D3 New Product Announcements D4 Modeling and Algorithms E3 PPP and Network-Based RTK 1 E4 Atmospheric Effects & Modeling F3 Galileo System Design & Services F4 GNSS-Inertial Navigation Systems 1 P3 GNSS in Uninhabited Vehicles P4 GNSS Challenges and Opportunities for
Government Use September 25, 2009
表 Y04
Morning Afternoon
A5 GNSS Antenna & Radio Technology A6a Remote Sensing with GNSS &
Integrated Sensors
A6b Urban & Indoor Navigation Technology 2
B5 GNSS-Inertial Navigation Systems 2 B6a Wireless Sensor Networks
B6b Unmanned and Autonomous Vehicles C5 Enhanced and Developing Systems C6 Aviation Applications
D5 Portable Navigation Devices D6a Land Based Applications 2
D6b Algorithms for Multi-sensor Fusion 2 E5 GNSS Receiver Algorithms 2 E6 PPP and Network-Based RTK 2 F5 Galileo & GPS/Galileo Reference &
User Receivers
F6a GLONASS Modernization, QZSS, &
Other GNSS
F6b Timing & Scientific Applications 藍字部分為我較長程參與場次。
由討論議題分項可看出近年衛星定位系統已由過去專注於美國之 GPS 系統擴展至歐盟的 Galileo 與俄羅斯的 Glonass 系統,導航技術則已由之前專注於衛星定位系統之研究轉移至與 其他感測器整合之技術,在應用領域則由傳統之航海、航空應用擴展到陸地車輛、行人、及 室內應用。由於本人近年研究領域偏向行人定位與室內無衛星狀況下的定位應用,因此亦選 擇相關議題論文發表場次,計參加以下論文發表:
9 月 23 日:
B1-1: “AnIntegrated IMU,GNSS and Image Recognition SensorforPedestrian Navigation”, C. Hide, T. Botterill and M. Andreotti, Geospatial Research Centre (NZ) Ltd
B1-2: “Developmentand Evaluation ofa Combined WLAN & InertialIndoorPedestrian Positioning System”,Korbinian Frank, Bernhard Krach, German Aerospace Center (DLR), Germany, Noel Catterall, HW Communications Ltd., England, and Patrick Robertson, German Aerospace Center (DLR), Germany
B1-3: “Augmenting Low-cost GPS/INS with Ultra-Wideband Transceivers for Multi-platform RelativeNavigation”, Arun Vydhyanathan, Henk Luinge, Makoto Tanigawa, Fred Dijkstra, Xsens Technologies B.V., The Netherlands, and Michael.S.Braasch, Maarten Uijt de Haag, Ohio
University, USA
B1-4: “A NovelYaw Rate SensorBiasErrorContainmentMethod Using Existing Vehicle Sensors”,Chaminda Basnayake, GM R&D Center
B1-5: “Multi-sensor Bayesian Estimation Interior Positioning for Stationary and Mobile Structures”,B. Tanju, S. Sarkani, and T. Mazzuchi, The George Washington University
B1-6: “A Tightly-Coupled Reduced Multi-SensorSystem forUrban Navigation”, Tashfeen Karamat, Jacques Georgy, and UmarIqbal,Queen’sUniversity
B1-7: “NonlinearModeling and Identification ofInertialErrorswith Application to 2D Vehicle Navigation”, Zhi Shen, Jacques Georgy, and Michael J. Korenberg, Queen's University
B1-8: “Vision Aided GPS/INS System forRobustLand VehicleNavigation”,Jianguo Jack Wang, Sarath Kodagoda and Gamini Dissanayake, University of Technology, Sydney, Australia
D2-1: “Vehicle Heading Determination Using OnlySingle-antenna GPS and a SingleGyro”,
表 Y04
Paul D Groves, Robin J Handley and Simon T Parker, QinetiQ ltd, United Kingdom
D2-2: “Performance Evaluation ofUltra-tight Integration of GPS/Vehicle Sensors for Land VehicleNavigation”,Tao Li, Mark G. Petovello and G. Lachapelle, University of Calgary, and C.
Basnayake, General Motors Technical Centre
D2-3: “RobustCarLocalization foran AutonomousVehicle in Urban Environments”,Andreas Sasse, Tobias Nothdurft and Peter Hecker, Technische Universität Braunschweig, Germany
D2-7: “Multiple IMU Integration forVehicularNavigation”,Jared B. Bancroft, University of Calgary
9 月 24 日:
B3-1: “Multi-sensor Fusion Using a Kalman Filter and Knowledge-based Systems”,Retscher G., Vienna University of Technology, Austria
B3-2: “Estimating Motion ParametersofHead byUsing Hybrid Extended Kalman Filter”, Sejong Heo, Oksik Shin and Chan Gook Park, Seoul National University, South Korea
B3-3: “Using OrthoSLAM and Aiding TechniquesforPrecisePedestrian IndoorNavigation”, Christian Ascher, Christoph Kessler, Matthias Wankerl, and Gert F. Trommer, University of
Karlsruhe, Germany
B3-A1: “Maps And Floor Plans Enhanced 3d Movement Model For Pedestrian Navigation”, Mohammed Khider, Susanna Kaiser, Patrick Robertson, and Michael Angermann, German
Aerospace Center (DLR)
B3-6: “Integrated Multi-Aperture Sensor andNavigation Fusion”,Andrey Soloviev,
University of Florida, and Jimmy Touma, Timothy Klausutis, Mikel Miller, Adam Rutkowski, Kyle Fontaine, Air Force Research Laboratory (AFRL)
B3-7: “Multi-SensorFusion forLocalization:Conceptand Simulation Results”,Damien Kubrak, Thales Alenia Space, François Le Gland, Liyun He, INRIA, and Yann Oster, Thales Alenia Space, France
D3-8: “AnOpen Source AGPS/DGPS Capable C-coded SoftwareReceiver”,Scott Gleason, QinetiQ Limited, UK., Morgan Quigley, Stanford University, and Pieter Abbeel, University of California at Berkeley
B4-1: “Integration ofLadarVision and InertialData forGNSS Denied Navigation”,Andrey Soloviev, University of Florida, David Eaton, Air Force Research Laboratory, and Maarten Uijt de Haag, Zhen Zhu, Ohio University
F4-2: “Using an AccelerometerConfiguration to Improve thePerformanceofa MEMS IMU:
FeasibilityStudywith a Pedestrian Navigation Application”,Thomas Williams, Anshu Pahadia, Mark Petovello and G´erard Lachapelle, University of Calgary
B4-3: “UseofVision Sensorsand LaneMapsto Aid GPS/INS undera Limited GPS Satellite Constellation”,John W. Allen and David M. Bevly, Auburn University
B4-4: “Terrain-based Navigation:Using Mobile LiDAR Systemsin Irban Environments”,C. K.
Toth and D. A. Grejner-Brzezinska, The Ohio State University
B4-5: “Integration ofa RFID Time-based CoO Positioning with INS Using a Time Data CaptureToolforVerification”,Fu Q. and Retscher G., Vienna University of Technology, Austria
表 Y04
B4-6: “Method and ApparatusforHigh Precision GNSS/UWB Surveying”,Glenn D.
MacGougan, University of Calgary, and Richard Klukas, University of British Columbia Okanagan, Canada
B4-7: “Non-GNSS Radio Positioning using the DigitalAudio Broadcasting (DAB)Signal”, Palmer, D, Moore, T, Hill, C, University of Nottingham, and Andreotti, M, Park, D, Geospatial Research Centre Ltd, New Zealand
F4-8:“Improving Accuracy with Multiple Sensors:Study ofRedundantMEMS-IMU/GPS Configurations”,St´ephaneGuerrier,SwissFederalInstitute of Technology
9 月 25 日:
D5-1: “A peer-to-peerKalman FilterforPedestrian Navigation”,Isabelle Kraemer and Bernd Eissfeller, University FAF, Munich, Germany
D5-2: “FarStart,NeitherWarm NorCold;Rapid TTFF Aftera Long Flight”,F. van Diggelen and C. Abraham, Broadcom Corp.
B5-4: “Performance AnalysisofLow CostINS/GPS POS SystemsforLand Based MMS Utilizing LC and TC Integration”,Y. W. Huang, K. W. Chiang, National Cheng Kung University, and Y. S. Lin, J. C. Lin, J. S. Tsai and C. H. Shih, National Land Surveying and Mapping Center, Taiwan
D5-5: “ContextDetection forImproving Positioning Performance and Enhancing User Experience”,Mahesh Chowdhary, SiRF Technology, USA, and Manish Sharma, Arun Kumar, Kolin Paul, Mahaveer Jain, Chinmay Agarwal, Gagan Narula, IIT, India
D5-6: “Multipath Detection and Mitigation by Means of a MEMS Based Pressure Sensor for Low-CostSystems”,Johannes Gutmann, Lukas Marti, Robert Bosch LLC, Research and
Technology Center, USA, and Gerhard Lammel, Bosch Sensortec GmbH, Germany
D5-7: “AnEconomicaland EffectiveMulti-sensor Integration for Portable Navigation System”,X. Zhao, Z. Syed, D.B. Wright, and N. El-Sheimy, University of Calgary, Canada
D5-8: “SimultaneousLocalization and Mapping forPedestrian Navigation witha
Foot-mounted IMU”,P. Robertson, M. Angermann, B, Krach, and M. Khider, German Aerospace Center, Germany
9 月 23 日中午在展覽場進行午餐,場內主要攤位為國防廠商如 Boeing,Lockheed Martin,
Northrop,高端衛星定位儀廠商如 Javad,Trimble,Novatel,Topcon,Spirent 及一些衛星定 位相關政府機構如 Galileo 及 IFEN 等,其他較小攤位則為一些感測器元件,天線,系統整合 廠商等。
我在 9 月 24 日晚間並受邀參加 GPS World 雜誌社舉辦的 GPS 50+ leaders 晚宴,此晚宴 邀請歷屆此榮譽得主及業界重要人士,並討論產業最新趨勢。9 月 25 日午間則參加 ION 舉辦 之頒獎午宴,頒發 Kepler Award 及 Parkson Award,前者為頒發給對衛星定位技術發展有卓越 貢獻之學者,本年度頒發給 Dr. Penina Axelrad,她畢業於 Stanford,現任教於 University of Colorado 航太系,在 GPS RAIM,衛星軌道姿態等有相關的研究。後者則頒發給在衛星定位 領域研究的優秀畢業研究生,本年度頒給 Dr. José Ángel Ávila Rodríguez。由於班機行程,我 於頒獎午宴後便離開賽凡那市,於 9 月 27 日清晨經舊金山返抵桃園國際機場。
表 Y04
二、與會心得
第一天上午參加的 B1:Multi-sensor Navigation 及下午的 D2 :Land Based Applications 1 分組,可以看出目前導航領域的研究趨勢已經由單獨衛星定位的技術研究轉向多感測器整 合,其實導航領域一直是依應用的環境選擇不同的感測器,由過去的航海使用羅盤、星象,
航空使用慣性導航,接著進入衛星定位系統,但受限於衛星信號僅在戶外接收良好。而為擴 展導航應用到室內環境及行人導航應用,目前可以看到 GPS 與 IMU 慣性感測器的整合是一 個研究的重點,室內則更加入無線定位(例如使用 WLAN、ZigBee 或 UWB)及影像辨識定 位或是雷射測距儀,整合理論也針對非線性的狀態模型與量測方程式採用 EKF、UKF 或粒子 濾波 PF 估測理論,另外在智慧型機器人定位應用中常見的 SLAM 同時建圖與定位技術也被 應用在發表的多篇論文,看起來衛星定位研究領域已經和智慧機械人定位領域合流,也使用 類似的理論與技術,因此在其他 IEEE 相關會議中未來也會看到有相關的研究。
第二天上午參加的 B3:Algorithms for Multi-sensor Fusion 1 分組同樣專注於衛星定位外 其他多感測器的信號整合。B3-3 論文提出一有趣的觀察為步行的步伐長度與步伐頻率及步伐 加速度能量相關,其中步伐加速度能量則被定義為三軸加速規的量測量和開根號,這是一個 有趣的觀察可在未來行人步行研究中實驗一下。B3-A1 論文則指出人類步行運動為 Target driven movements 與 Non-target driven movements 的混合,前者較適合以拘束條件描述和後者 則適合以 Bayesian model 如粒子濾波描述。另外我參加 D3-8 論文了解目前開放程式碼的 GPS 軟體接收器發展進度。下午參加的 B4:Alternatives and Backups to GNSS 分組使用的定位感 測器更是五花八門,Laser、Vision、地圖、UWB,甚至 RFID 和 DAB 都紛紛被用於定位而有 不同程度的成功。值得一提的是我與 B4 分組主持人 Dr. Frank van Diggelen 是舊識,他發明不 少高敏感度 GPS 和 AGPS 定位領域的關鍵技術,如 Massive Correlator 加強接收機靈敏度,
Long Term Orbit 估測伺服器由無線網路傳輸衛星軌道資訊等,目前在 Broadcom 任職,但他 們現在也積極朝個人定位及多感測器整合的領域研究,因為在下一波的商業應用中大家都看 好持手機的個人定位需求可為導航產業帶來下一階段的榮景。
第三天上午主要參加 D5:Portable Navigation Devices 分組,討論之論文同樣集中於行人 定位。D5-5 提出使用信號處理的分析方法辨識人體的不同運動模式,如靜止、走路、跑步、
駕駛車輛、上下樓梯、電梯等,從而可使用不同之運動方程式定位,也許是傳統感測器整合 理論之外在行人定位研究的一個方向,D5-8 則嘗試使用裝於腳上的 IMU 結合室內建築平面 圖與 SLAM 技術進行定位,與作者目前正在進行之研究相當類似。
整體而言參與這三天的研討會讓我清晰瞭解目前導航定位領域意圖解決的問題已逐漸轉 向室內與行人定位的應用,並與本人近年研究方向互相吻合,也讓未來的走向能更加清晰。
三、建議
導航領域是一個快速變化的研究領域。本人在 1990 年剛開始進入此領域時 GPS 全球衛 星定位系統才開始商業化,當時的研究重心多在基本的衛星定位方法如 DGPS、載波相位處
表 Y04
理等,後來隨著接收機硬體的普及進入 2000 年後有段時間集中在新的接收機技術如高靈敏度 處理技術、Multipath mitigation 等。在基本的 GPS 軟硬體技術都有長足進步後,衛星定位本 身的研究相對減少,反而是如何解決其應用限制的研究如加入 IMU 感測器等在前幾年成為主 流。在這次研討會中感覺這個趨勢更朝向 IMU 以外任何能改善定位性能,加大應用範圍的其 他定位技術如影像、雷射、室內無線網路等又被納入大家的關注,導航定位領域的寬廣與間 容多研究領域的特性在此表現無遺。在這樣的狀況下,及時參與國際會議瞭解此領域研究重 點的演變對相關研究人員非常重要。雖然在國內從事衛星定位研究領域的人員相較較少,但 以此領域逐漸往室內行人定位及智慧機器人定位的應用研究演進的趨勢,再加上目前國外手 機與行動通信大廠如 Nokia、Apple、Google 相繼在手機上加入導航功能以爭食未來 LBS 定 位服務大餅的外在環境,相信此研究領域之後將更形重要,值得國科會加以持續的關注。
四、攜回資料名稱與內容 (1)會議議程
(2)研討會論文集光碟(於 2009 年 12 月另行寄到)
五、其他 無