Volume 25, No.4, 2020, pp. 241-252 DOI:10.6574/JPRS.202012_25(4).0004
1國立臺灣海洋大學通訊與導航工程學系 碩士 收到日期:民國 109 年 12 月 22 日
2國立臺灣海洋大學通訊與導航工程學系 碩士生 修改日期:民國 109 年 12 月 25 日
3國立交通大學電控工程研究所 博士生 接受日期:民國 109 年 12 月 29 日
4國立交通大學電控工程研究所 教授
5國立臺灣海洋大學通訊與導航工程學系 副教授
* 通訊作者, E-mail: [email protected]
應用低成本雙頻 GNSS RTK 技術 於無人機定位定向之研究
王士益
1劉瑋傑
2顏永哲
3歐陽盟
4林修國
5*摘要
無人機在戶外定位仰賴全球衛星導航系統 (Global Navigation Satellite System, GNSS) ,透過即時動 態定位 (Real-Time Kinematic, RTK) 技術可達到公分等級的定位精度。無人機利用電子羅盤 (E-compass) 來取得載具的方向角,但磁力感測器易受干擾產生明顯誤差。若是透過兩組 GNSS 接收機求得高精度坐 標即可求得載具方向角,這可與慣性感測元件 (Inertial Measurement Unit, IMU) 搭配,經由卡爾曼濾波器 輸出穩定的方向角。
本文使用兩組 PMGN1 GNSS 接收機,靜態實驗中 RTK 定位成功率可達 99%,坐標誤差約為 1 cm;
動態實驗中 RTK 定位成功率為 97%,在兩 GNSS 都為固定解的情況下能提供精度 3 度的航向角,使無人 機的航向角判別能不單依靠磁力計運作。
關鍵詞:全球衛星導航系統、即時動態定位、無人機、航向角
1. 研究動機
無人機已廣泛使用 GNSS (Global Navigation Satellite System) 進行導航,不過使用上還是以單 頻單天線為主,過往雙頻具有 RTK (Real-Time Kinematic) 功能的 GNSS 接收機體積龐大且較昂 貴,不利於無人機使用,但隨著低成本輕量化雙 頻具 RTK 功能的 GNSS 接收機的出現,無人機 搭載雙頻 RTK 功能的 GNSS 接收機成為無人機 戶外定位的解決方案之一。本研究目的為利用具 有 RTK 功能的雙頻 GNSS 接收機使無人機具公 分級定位精度,另外透過雙 GNSS 接收機取得無 人機航向角,此航向角不受磁場干擾影響,整合 公分級定位精度與定向能力於無人機飛控系統 系統,達成無人機精密控制的能力,並透過靜態 測試及實際飛航測試分析定位情況。
2. 研究背景
2.1 無人機應用
近年來有許多使用 GNSS RTK 接收機於 UAV 進 行 航控 攝影測量 的研究 。Ekaso et al.
(2020) 利用大疆航測用無人機分析影像控制點 的實際精度,直接計算航測影像地面坐標時其誤 差來自拍照時間遲延、相機定位及定向誤差。於 航高 40 m 的情形下直接以地面控制點評估的精 度為 30 至 60 cm。
Rabah et al. (2018) 以 e-bee 定翼無人機使用 GNSS RTK 技 術 與 IMU (Inertial Measurement Unit) 搭配外方位參數估計軟體,於航高約 85 m 的情形下,利用地面 18 個控制點評估以直接計 算影像座標的精度,以虛擬主站技術估計得水平
精度為 2.9 cm 高度精度為 2.6 cm。以一般 RTK 主站,估計得水平精度為 3.4 cm 高度精度為 2.9 cm。
Hugenholtz et al. (2016) 分析了利用 RTK 技 術與未利用 RTK 技術的 GNSS 接收器,進行直 接計算影像座標的精度分析,實驗對照組是以地 面控制點協助計算的影像座標,最後以 17 個水 平控制點與 180 個高度控制點進行評估。直接計 算影像座標時具 RTK 技術者,精度優於無 RTK 技術者 10 到 100 倍,而具 RTK 技術者與以地面 控制點協助求解者進行比較時,平面座標精度相 當而高度精度則 RTK 技術者經度差 2~3 倍。
2.2 PMGN1
PMGN1 整合了 U-blox ANN-MB-00-00 雙頻 GNSS 天線、電子羅盤 (E-compass) 及低成本高 精度雙頻 GNSS 接收機晶片 U-blox F9P,可透過 micro usb 連接至電腦上使用 U-blox 的 u-center 進行 F9P 的設定,其輸出腳位對應本研究使用的 飛控主板 pixhawk 4 mini 的 GPS Module port。
圖 1 PMGN1 正面
圖 2 PMGN1 背面
3. 無人機系統
3.1 硬體架構
本文採用自組式四旋翼無人機系統,四旋翼
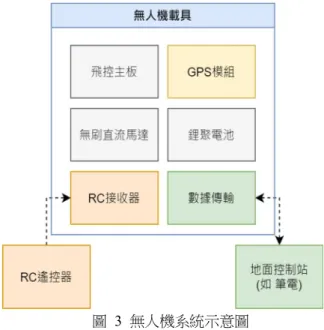
無人機多採用質地輕巧堅固的碳纖維做為機架 的材料,搭配無刷直流馬達做為動力的輸出,並 以電子變速控制器控制其輸出轉速,使用鋰聚電 池做為無人機的整體電源供應,而控制部分是由 飛控主板做為無人機的運算核心,另外也使用遙 控裝置及數據傳輸。(ArduPilot Dev Team, 2020b)
圖 3 無人機系統示意圖
3.1.1 馬達及電子變速控制
馬達與電子變速控制為無人機動力輸出部 分,由飛控板輸出脈波寬度調變 (Pulse Width Modulation, PWM) 訊號給連接在各馬達上的電 子變速控制器 (Electronic Speed Controller, ESC),
再透過電子變速控制器控制馬達,達到調節馬達 轉速的功效。在無人機上所使用的是直流無刷馬 達,可由其 KV 值計算其轉速,KV 值定義為每 伏特電壓可產生多少轉速,在相同電壓下,低 KV 值的馬達須配合較長的螺旋槳,高 KV 值的馬達 轉速高則須配合較短的螺旋槳,若將低 KV 值的 馬達配上較短的槳會造成推力不足的情況,高 KV 值的馬達若配上較長的獎則會遭成電流過大,
若超過馬達能負荷的範圍則能會造成馬達燒壞 的情況。
3.1.2 遙控與無線數據傳輸系統
無人機自動飛行時無法確定其飛行軌跡是 否會遇到障礙物,因此需要透過遙控系統可以隨
時介入,用來控制飛機的飛行與飛行模式切換,
保障飛行安全,遙控裝置多使用 2.4GHz 頻段進 行點對點的無線通訊。無人機上使用的無線數據 傳輸系統遵循 MAVLink (Micro Air Vehicle Link) 通訊協定,MAVLink 是一種非常輕量的訊息傳 輸協議,專門用於與無人機以及地面控制站之間 進行通信,使得地面控制站能即時監視無人機在 航 行 中 的 飛 行 數 據 ( 高 度 、 方 位 、 速 度 等 ) (Wikipedia, 2020)。
圖 4 數據傳輸裝置 圖 5 遙控裝置發射端
3.1.3 飛控主板
飛控板為無人機最主要的運算核心,其最大 的任務是根據不同的感測器來決定每個馬達輸 出的轉速來達到機體的姿態平衡或是位置控制,
若是有越多不同種類的感測器則能使飛控板有 更多依據來判斷機體的姿態平衡或位置控制。其 判斷的原則及計算方式則會因所使用的飛控韌 體不同而有所差異。本文所使用的飛控板為 pixhawk 4 mini (圖 6),可相容 PX4 及 Ardupilot 兩種飛控韌體,本文使用 Ardupilot 作為飛控韌 體。pixhawk 4 mini 完整硬體規格如表 1,其內建 加速規、陀螺儀、磁力計及氣壓計,可供飛控系 統直接使用,其餘感測器則可透過外部接口連接,
動力輸出方面,pixhawk 4 mini 具有 8 組 PWM 輸 出,可適用至 8 軸多旋翼。
圖 6 pixhawk 4 mini 飛控板
表 1 pixhawk 4 mini 硬體規格 pixhawk 4 mini
處理器 STM32F765
32Bit Arm®
Cortex®-M7 216MHz 2MB memory 512KB RAM 感測器
Accel/Gyro ICM-20689 、 BMI055
Magnetometer IST8310 Barometer MS5611 傳輸介面
2 I2C ports 5 UART ports 8 PWM outputs
1 CAN port microSD card slot
尺寸 Dimensions:38x55x15.5mm Weight: 37.2g
3.2 地面控制站
無人機系統的地面控制站為一電腦視窗程 式,可透過數據傳輸系統接收無人機的狀態,亦 可直接接上傳輸線進行無人機參數調整。地面控 制站也是遵循 MAVLink 通訊協定,將無人機訊 息解碼後以視覺化方式呈現供使用者查看。
ArduPilot 相 對 應 的 地 面 控 制 站 軟 體 為 Mission Planner,也是屬於開源的軟體可讓開發 者進行修改。Mission Planner 可以連接 RTK 的參 考站,將參考站資料傳送至無人機,使無人機能 進行 RTK 定位,連接參考站的方式支援電腦本 地 COMport、TCP、UDP 以及常用於 GNSS 定位 的 NTRIP。
圖 7 Mission Planner 地面控制站程式畫面
圖 8 Mission Planner RTK 參考站連線畫面
3.3 飛控韌體
在本文所使用的飛控板可相容的開源飛控 韌體有 PX4 及 ArduPilot 兩大專案,ArduPilot 因 發行時間較早且調整軟體支援多國語系,多為業 餘或自組無人機玩家所使用的主流飛控韌體,對 於定翼機、旋翼機、無人船及自走車開發出具備 完整且出色的飛行控制系統,同時兼具跨平台及 較多的驅動程式支持,故此本文使用的飛控韌體 即為 ArduPilot。
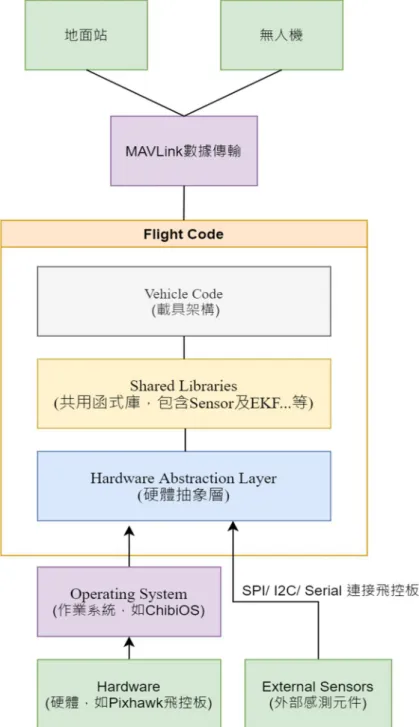
ArduPilot 韌體架構如圖 9,由架構中得知 ArduPilot 的飛行控制核心是由 Flight Code 負責,
其 中 分 為 三 個 階 層 : Vehicle Code 、 Shared Libraries 、 Hardware Abstraction Layer (HAL) (ArduPilot Dev Team, 2020a)。Vehicle Code 定義 了不同型式的載具,根據所選擇的載具,系統會 調整成所選載具的硬體架構。Shared Libraries 為 共用函式庫,其中包括感測器驅動程式,姿態和 定位估計及 PID 控制。HAL 為硬體抽象層,使 ArduPilot 可移植到許多不同平台。
圖 9 ArduPilot 架構 (修改自 ArduPilot Dev Team, 2020b)
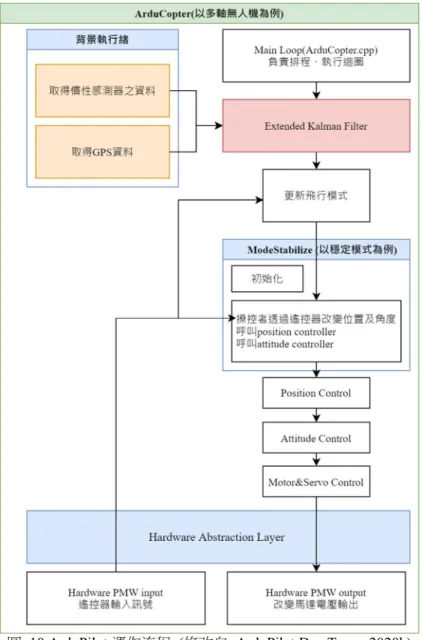
圖 10 ArduPilot 運作流程 (修改自 ArduPilot Dev Team, 2020b) 圖 10 為 ArduPilot 韌體運作流程,ArduPilot
處理飛行任務是由一主要迴圈反覆執行,逐一呼 叫函式。
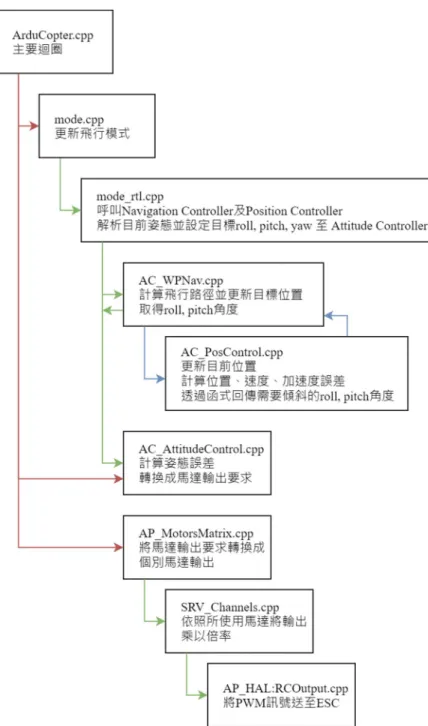
圖 11 為 ArduPilot 韌體在自動返航模式時的 流程,飛行中將不斷的反覆執行,第一步檢查目 前飛行的模式並呼叫該模式,圖中為自動返航模 式;第二步解析目前姿態並設定目標 roll、pitch、
yaw 值至姿態控制器,計算飛行路徑並更新目標 位置;第三步為計算位置、速度、加速度及姿態 誤差;第四步將上述誤差參數轉換為馬達個別的 PWM 訊號;最後將 PWM 訊號傳至 ESC,藉此 驅動馬達以反應飛行任務。
無人機系統飛行狀態使用三軸加速度計、三 軸陀螺儀及三軸電子磁力計、以及 GNSS 所提供
的 位 置 及 速 度 , 透 過 擴 展 卡 爾 曼 濾 波 器 (Extended Kalman Filter, EKF) 預估外插及更新 狀態來修正狀態向量。
一般的卡爾曼濾波器是利用遞迴的方式,將 前一時刻之估測值及新的觀測量進行解算,得出 當前時刻之估測值,在動態系統中會利用狀態轉 移矩陣 (State Transition Matrix),將當前時刻之 狀態向量進行估測,並藉由觀測量來修正。
在 擴 展卡 爾曼 濾波 器中 ,狀 態轉 換模 型 (State Transition Model) 和 觀 測 模 型 (Measurement Model) 不需要是狀態的線性函數,
可以是可微函數。擴展卡爾曼濾波器是卡爾曼濾 波器的非線性版本,可對當前均值和協方差的估 計線性化。
圖 11 ArduPilot 自動返航模式程式流程 (修改自 ArduPilot Dev Team, 2020b)
4. 實驗成果與分析
4.1 實驗設備與規劃
本實驗使用兩部 PMGN1 (見 2.2 節) 搭載在 自組式四旋翼無人機,做為實驗的平台。無人機 飛控板為 holybro pixhawk 4 mini,內建 9 軸 IMU,
實驗平台如圖 12。
圖 12 實驗平台 20 cm
F9P 定位使用 4 個星系,GPS、BDS、GLO、
GAL,使用頻段為 L2OF、L2C、E1B/C、B2I、
E5b、L1C/A、L1OF、B1I,定位頻率為 5Hz,使 用 UBX-NAV-PVT 訊息提供飛控板定位資訊,
GNSS 2 另外提供 UBX-NAV-RELPOSEND 訊 息,以提供飛控板 GNSS 觀測航向角資訊。
實驗平台兩天線相距約為 20 cm,其中一個 天線為移動參考站 (Moving Base),其也能提供 RTK 定位結果,另一天線為待測站 (Rover),接 收來自移動參考站的資料,使其也能進行 RTK 定 位,也就是說無人機會有兩個 RTK 定位的坐標。
靜態實驗目的是要來驗證在靜置情況下 RTK 的 定位精確度,動態實驗目的是透過固定飛行路線 來分析飛行過程 RTK 的定位情況,以上實驗之 參考站位置皆相同,使用的接收器等級與 UAV 上為 PMG 同系列產品皆為低成本接收器,其天 線固定於國立臺灣海洋大學延平大樓 11 樓。
4.2 靜態實驗
靜態實驗透過靜置無人機於國立臺灣海洋 大學延平大樓 11 樓戶外空曠場域進行 RTK 定 位,透過飛控板紀錄的 log 檔分析定位狀態及其 他相關資訊,Alt 為正高,σx為求得的航向角。實 驗中兩個 GNSS 天線之 RTK fix rate 皆可達 99%,
GNSS1 為天線一的成果,GNSS2 為天線二的成
果,兩天線定位成果接近,平面重覆性精度約為 0.6 cm,高程重覆性精度約為 1.4 cm,而 POS 欄 位為加入慣性導航經 EKF 運算後的成果,精度 稍為劣化應是慣性導航感測器等級較低影響了 定位成果。
圖 13 參考站天線位置
圖 14 靜態實驗載具擺放
表 2 靜態實驗量測結果分析
日期 時間 時長(s)
2020/05/25 09:51:56 - 10:25:06 1990 總筆數 Y N No Signal RTK Fix rate GNSS 1
9953 9953 0 0 100%
GNSS 2 9896 0 57 99.4%
平均(m) 標準差(cm)
GNSS 1
E 328395.9721 0.65
N 2799548.5481 0.58
Alt 44.3975 1.31
GNSS 2
E 328396.1658 0.63
N 2799548.5326 0.50
Alt 44.3875 1.46
POS
E 328396.2604 1.45
N 2799548.5224 0.66
Alt 44.4352 1.72
天線差值 0.2059 0.51
σx(deg) 8.97
圖 15 靜態實驗量測誤差及定位狀態
4.3 動態實驗
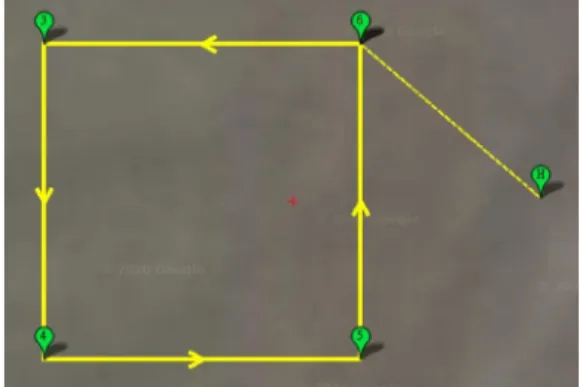
動態實驗透過固定路線的飛行計畫進行測 試,測試場域為國立臺灣海洋大學育樂館前 X 廣 場,實驗目的為分析載具在飛行時運動及姿態的 狀態,圖 16 為飛行計畫的路線及其起飛位置,
飛行計畫為從起點起飛 3 m 飛往圖 17 中矩形右 上角,一逆時針方向飛置矩形其他三角,最後飛 置起點上空降落。
圖 16 動態實驗周遭環境
圖 17 動態實驗飛行路線
圖 18 動態實驗起飛位置
在 2020/6/16~2020/6/19 進行共 12 次動態實 驗,因篇幅需求以下放入第一次動態實驗。
表 3 動態實驗天線差值 (fix) 比較與降落位置 比較
動態實驗 天線差值(fix)
平均(cm)
天線差值(fix)
標準差(cm) σx(deg) 降落位置誤差 (cm)
一 20.73 0.62 10.68 5.23
二 20.77 0.79 13.69 10.23
三 20.70 0.79 13.80 12.89
四 20.72 0.74 12.83 7.87
五 20.64 0.65 11.30 10.79
六 20.78 0.97 16.83 6.67
七 20.63 0.58 10.05 8.87
八 20.63 0.58 10.48 14.65
九 20.59 0.78 13.62 8.64
十 20.48 0.89 15.59 8.35
十一 20.56 0.70 12.18 5.67
十二 20.47 0.84 14.82 9.51
平均 12.98 9.11
標準差 2.13 2.77
80 cm
圖 19 動態實驗降落位置比較
4.3.1 動態實驗一
表 4 動態實驗一:結果分析
圖 20 動態實驗一:立體飛行軌跡
日期 時間 時長(s)
2020/06/16 16:35:44 - 16:37:30 106.4 總筆數 Y N No Signal RTK Fix rate GNSS 1
532 526 6 0 98.8%
GNSS 2 503 28 1 94.5%
平均(cm) 標準差(cm)
天線差值(fix) 20.73 0.62
天線差值(no fix) 34.91 5.89
σx(deg) 10.68
總平均:9.113 cm 標準差:2.770 cm
5.233 cm 10.233 cm 12.885 cm 7.80 cm
10.786 cm 6.668 cm 8.867 cm 14.650 cm
8.638 cm 8.350 cm 5.665 cm 9.509 cm
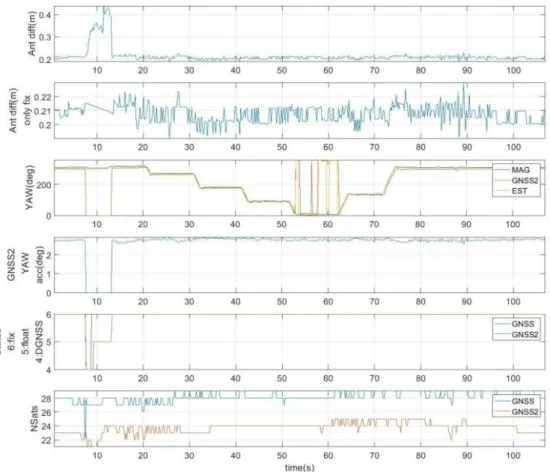
圖 21 動態實驗一:天線差值、航向角及定位狀態
動態實驗中,GNSS1 之 RTK fix rate 可達 96%,GNSS2 之 RTK fix rate 可達 76%,根據計 算出的天線差值,動態實驗的天線差值與靜態實 驗的天線差值之相差皆落在 0.5 cm 左右,歷次動 態實驗誤差標準差皆低於 1 cm。飛行過程中皆有 衛星丟失之情況,以至於無法鎖定在 fix 的狀態,
其中多次是發生在無人機起飛的時候。各動態實 驗降落位置與起飛位置相比,每次降落都能降落 在直徑 80 cm 的人孔蓋內。在兩組 GNSS RTK fix 的情況下可提供無人機載具的航向角,圖 21 中 顯示由 EKF 參數估算時估算得之航向角理論精 度約莫在 2.7 度,無法 fix 時則無法提供無人機 載具的航向角,但無人機系統能透過磁力計及慣 導系統持續輸出載具的航向角度。
5. 結論與未來展望
本文使用低成本雙頻 GNSS 接收機於無人機 飛行並使用 RTK 技術,使無人機飛行時有更高
的定位精度,以達到更廣泛的飛行應用及提升飛 行安全。此接收機還附有移動參考站的功能,同 時搭載兩個接收機及兩個天線能提供無人機的 航向角,可以讓無人機對載具航向角的判別有另 外一個觀測量,藉此能避免磁力計因磁場干擾而 失準。搭配飛控韌體的擴展卡爾曼濾波器可將各 感測器的觀測量進行融合,使載具有相對穩定且 準確的位置、速度及姿態。
在靜態實驗中,RTK fix rate 皆可達 99%,平 面誤差約為 0.5 cm 而高程誤差約為 1.5 cm,其成 果與測量等級高價 GNSS 接收器相當。在動態實 驗中,RTK fix rate 為 97%及 76%,天線差值與 靜態實驗的天線差值相差皆在 0.5 cm 左右,在兩 組 GNSS 都為固定解的情況下,GNSS 接收機提 供的航向角精度為 2.7 度。
由於本研究所使用的無人機為小型無人機,
所能乘載的重量有限,雙頻 GNSS 接收機及其天 線相較過去的單頻系統在重量上重上許多,雖可 以提供較好的定位效果但會影響到無人機的續
航時間及載具的運動性表現。另外,也受制於較 小的機型,兩 GNSS 天線距離無法拉大,僅能提 供精度 3 度的航向角。未來若能改用較大的機型,
兩 GNSS 天線距離拉大,GNSS 所提供的航向角 可以越精準,雙頻 GNSS 系統的重量對載具的影 響也會較小。
本研究使用 GNSS 系統與慣性導航系統結合,
使無人機有準確穩定的位置、速度及姿態,若是 未來能搭配其他感測器,如 Lidar、深度攝影機等 等,將能使無人機有更多的資訊判別載具的各項 狀態,進而使無人機更加穩定且安全。
致謝
本文因科技部計畫 (108-2321-B-009-001) 支持得 以順利完成。
參考文獻
ArduPilot Dev Team, 2020a. ArduPilot Code Overview, Available at:
https://ardupilot.org/dev/docs/apmcopter-code- overview.html, Accessed December 01, 2020.
ArduPilot Dev Team, 2020b. Introducing Copter,
Available at:
https://ardupilot.org/copter/docs/introduction.h
tml, Accessed December 01, 2020.
Ekaso, D., Nex, F., and Kerle, N., 2020. Accuracy assessment of real-time kinematics (RTK) measurements on unmanned aerial vehicles (UAV) for direct geo-referencing, Geo-Spatial Information Science, 23(2): 165-181.
Hugenholtz, C., Brown, O., Walker, J., Barchyn, T., Nesbit, P., Kucharczyk, M., and Myshak, S., 2016. Spatial accuracy of UAV-derived orthoimagery and topography: Comparing photogrammetric models processed with direct geo-referencing and ground control points, Geomatica, 70(1): 21-30.
Rabah, M., Basiouny, M., Ghanem, E., and Elhadary, A., 2018. Using RTK and VRS in direct geo- referencing of the UAV imagery, NRIAG Journal of Astronomy and Geophysics, 7(2):
220-226.
Wikipedia, 2020. MAVLink, Available at:
https://en.wikipedia.org/wiki/MAVLink, Accessed December 01, 2020.
1 Master, National Taiwan Ocean University Received Date: Dec. 22, 2020
2 Master Student, National Taiwan Ocean University Revised Date: Dec. 25, 2020
3 Ph.D. Candidate, National Chiao Tung University Accepted Date: Dec. 29, 2020
4 Professor, National Chiao Tung University
5 Associate Professor, National Taiwan Ocean University
* Corresponding Author, E-mail: [email protected]
UAV Positioning and Heading Angle Estimation Using Low-Cost Dual-Frequency GNSS Receivers
Shi-I Wang
1Wei-Chieh Liu
2Yung-Jhe Yan
3Mang Ou-Yang
4Shiou-Gwo Lin
5*Abstract
Real-Time Kinematic (RTK) technology can provide centimeter level positioning accuracy. In this study, using RTK technology on UAV navigation control is very helpful. Two RTK GNSS receivers place on UAV can provide a heading angle measurement. It can co-work with E-compass to obtain the heading angle of the vehicle.
GNSS compass can avoid magnetic disturbance problem.
This article uses two sets of PMGN1 GNSS receivers. In static experiment, RTK fix rates can reach to 99%, and the coordinate error is about 1 cm. In dynamic experiment, RTK fix rates are 97%. The accuracy of the heading angle is less than 3 degrees when the baseline of two antenna is about 20 cm. This result can let the UAV heading angle determination not only rely on E-compass.