第三章 研究方法
本研究主要在探討運用機器人於高中程式設計對學習的影響,以瞭解機器人 對學習是否有幫助及如何產生幫助。以下說明本研究的研究設計、實施對象、視 覺化程式設計環境、教學計劃,及研究工具,最後說明實驗步驟。
第一節 研究設計
本研究以準實驗研究法(quasi-experiment)實施,研究的自變項為是否使用 機器人進行教學,依變項為學生的程式設計成就及對程式設計的興趣與態度。實 驗時將學生分為實驗組與控制組二組。課程劃分為兩部分,實驗組第一部分使用 機器人教導程式設計的基本控制結構,教學時間為 4.5 週,控制組則用流程圖學 習程式規劃,但不使用機器人,流程圖活動共規劃 2 週。實驗組學生在第一部分 結束後,接受成就測驗及填寫一份問卷,以瞭解學生使用機器人後的成效及態 度。第二部分從第 6 週開始至第 11 週,共經歷 6 週,兩組均使用傳統的教學方 式學習 VB( Visual Basic)程式設計,兩組的授課教師及教學時間、教材內容均 相同。二組學生在第二部份結束後,也接受成就測驗及態度問卷,以比較二組學 生的學習成效,藉以瞭解機器人的學習是否對後來學習 VB 程式設計產生學習遷 移的效果。表 3-1 列出研究設計規劃。
表 3-1 教學時間規劃
時間(weeks) 實驗組 控制組
W1-W3 W4-W5
LEGO Mindstorms
流程圖
W6-W11 VB 程式設計 VB 程式設計
第二節 研究對象
本研究以南港高中一年級兩班學生共有 77 人作為研究對象,其中一個班級 為實驗組,另一班級則為控制組。參與實驗的學生正在修習「計算機概論」課程,
由於考慮學生先前若曾經學習程式設計,可能影響實驗的結果,因此調查學生程 式能力的背景,在資料分析階段將已學過程式設計的學生排除,因此,最後有效 樣本為實驗組 35 名學生,控制組 35 名學生。
第三節 機器人及視覺化程式設計環境
市面上販售的機器人眾多,其中以 LEGO Mindstorms 的接受度較高,因為學 生不必瞭解硬體構造便能操控機器人,減少認知上的額外負荷,且由於 LEGO Mindstorms 在教育上的應用普遍,因而發展出多種相應的軟體,教師可視需要選 擇不同軟體搭配,增加教學的彈性,故本研究亦選擇 LEGO Mindstorms 作為教學 輔助工具。
LEGO Mindstorms 是由 RCX(Robotics Command eXplorer)與積木組合而成,
其他可組合的零件包括輪子及各種感應器。RCX 類似機器人的大腦,裡面包含微 處理器,使用者經由撰寫程式控制 RCX,即操控機器人的動作,在教學過程中,
學生經由程式觀察機器人的動作通常需要歷經以下步驟:
1、 撰寫程式控制機器人完成特定任務;
2、 透過連接到電腦的紅外線傳輸器(Infrared transmitter)下載程式至機器 人;
3、 執行並觀察程式,若程式執行與預期不符,則修改程式,並重覆第 2 至 第 3 步驟,直到程式執行正確。
控制 LEGO Mindstorms 的程式可以在兩類軟體中撰寫,第一類是視覺化的程
式語言,例如 LEGO 公司提供的 ROBOLAB;第二類是使用一般程式語言的程式 編輯環境,在此環境內可以使用一般程式語言操控機器人。黃世隆(2005)使用 Java 程式語言操作機器人,但教學過程發現學生在 Java 的程式編輯環境裡,雖然 可以同時編譯 Java 程式及操控機器人的程式,但每次編譯程式需要額外選擇編譯 器,環境相對地複雜,學生在編譯的過程中經常遇到問題,而且使用文字化的編 輯環境,學生必需額外記憶操控機器人的指令,對學生造成認知上的負擔。為了 改善這些困境,減少學生花費時間在這些不必要的問題,讓學生有較多的時間實 地操作 LEGO Mindstorms,且配合培養程式規劃能力的教學目標,我們選擇視覺 化程式設計環境。
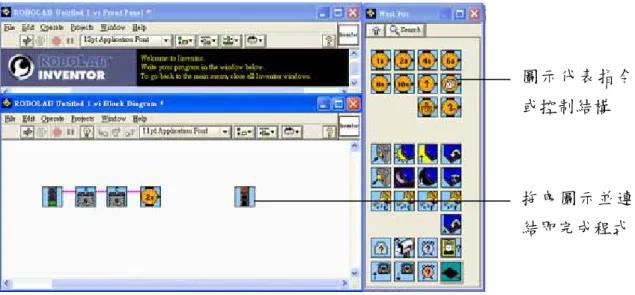
Reichert、Nievergelt 與 Hartmann(2001)設計的 Kara 程式設計環境,亦包 含 LegoKara 讓使用者在 Kara 視覺化環境裡編輯程式,直接下載至 LEGO Mindstorms 機器人執行,但由於 LegoKara 是使用 finite state machines 的邏輯撰寫 程式,所以必須先培養學生 finite state machines 的概念。ROBOLAB 是 LEGO 公 司隨機器人附贈的視覺化程式編輯軟體,其程式編輯環境如圖 3-1,使用者用拖 曳圖示的方式編輯程式,每一個圖示代表機器人的動作或控制結構,將拖曳的圖 示之間用線連接便完成程式,完成的程式如同流程圖,一眼就能明瞭程式的架 構,而且語法趨近於零,若程式尚未完成就下載至機器人,ROBOLAB 會圈選未 完成的部分,提醒使用者,非常適合初學者使用。為了減少學生在認知上的負荷,
讓 學 生 將 時 間 用 來 思 考 與 解 決 問 題 , 我 們 選 擇 ROBOLAB 為 操 控 LEGO
Mindstorms 的軟體。
圖示代表指令 或控制結構
拖曳圖示並連 結即完成程式
圖 3-1 ROBOLAB 程式編輯環境
第四節 教學規劃
Chen & Morris(2005)認為要讓程式設計更容易被初學者接受,必須將程式 設計觀念簡化,但仍然保有程式設計的本質,而程式設計的本質便是發展演算 法,所有演算法的設計皆可簡化為三大結構:循序結構、條件判斷以及迴圈,此 三大結構為程序性程式語言共有的基本概念。故本研究教學的重點為程式基本控 制結構-循序、條件判斷、迴圈的學習,希望學生建立基本的程式設計概念,培 養學生程式規劃的能力。以下分三部分詳述機器人、流程圖及程式設計教學規劃。
壹、實驗組機器人教學
實驗組以九堂課的時間學習 LEGO Mindstorms 機器人程式設計概念,每週二 堂課,每堂課 50 分鐘,共規劃五個單元,如表 3-2 所示。
表 3-2 機器人教學規劃
時間 單元名稱 教學目標 教學內容
1 堂 ROBOLAB 簡介 學 習 操 作 ROBOLAB 軟體 及認識機器人
在 ROBOLAB 軟體上編輯、修 改程式、傳送程式到機器車、操 作機器車
2 堂 單元一 誰來叫我起床
熟悉機器人的操 作及瞭解程式的 循序執行
操作機器人按照指令順序執行 動作,如前進、後退、轉彎、發 出聲音等
1.5 堂 單元二 機器人放煙火
瞭解程式的循序 執行
設定機器人馬達動力及執行時 間
2.5 堂 單元三
我的機器人會看路
學習條件控制的 觀念與使用時機
使用觸碰感應器,若機器車發生 碰撞時執行一連串動作
1 堂 單元四 找出口
瞭解條件迴圈的 使用時機與用法
讓機器人運用觸碰感應器尋找 出口
1 堂 單元五 機器人走迷宮
綜合運用前幾個 單 元 學 到 的 知 識,增強概念
讓學生運用學到的知識操作機
器人走出迷宮
為了讓學生在機器車的情境中自然而然地培養程式設計觀念,在教學過程中 並不特別強調特定的程式概念,而是將程式概念隱含在設計的情境中,學生在操 作機器車完成任務時必需使用該概念,並在觀察機器車執行時驗證、增強觀念。
除了單元一與單元五之外,每一個單元均提供一個範例與兩個習題作練習,每個 範例均提供完整的程式讓學生下載執行與修改。每個單元教學架構依序為範例教 學、實作習題 1、實作習題 2。單元開始時講解範例,接著讓學生下載執行範例,
學生依照習題 1 的要求嘗試修改範例並觀察程式執行,若需要用到任何新的指 令,可以查閱講義,之後再練習習題 2。
由於剛開始學生對程式編輯環境及控制機器人並不熟稔,所以第一單元設計 三個範例及習題,讓學生從範例中學習最基本的機器車操作,如前進、後退、轉 彎、控制時間…等,接著在習題解決類似的問題,同時學習使用程式編輯環境。
第五單元則設計迷宮,每位學生必需綜合運用單元一到五學到的技巧,獨立設計 程式讓機器人走出迷宮。
本研究共使用 20 套機器人,實驗組班級人數 40 人,因此,兩個人共同使用 一個機器人。每一台機器人都附有一個紅外線傳輸器,透過紅外線傳輸器,可以 將程式由 PC 傳送到機器人。雖然兩人共同使用機器人,但每位學生都要實作習 題,紅外線傳輸器的介面是隨插即用的 USB,因此當學生需要使用機器人時,直 接將紅外線傳輸器安裝在自己的電腦上即可。
貳、控制組流程圖教學
為了讓控制組的學生也瞭解程式的規劃及流程,我們安排 4 堂課讓控制組學 生學習畫流程圖,教材內容主要為教導學生利用流程圖,規劃解決問題的程序,
流程圖使用三種基本控制結構:循序、條件判斷與迴圈,並且提供 10 個範例供
學生練習畫流程圖,教師以寫黑板的方式,逐一講解流程圖符號,接著讓學生用
紙筆練習,詳細內容請參閱附錄一。實驗組與控制組都接受演算法規劃的課程,
兩組的不同只有在於實驗組用機器人輔助學習,而控制組沒有使用機器人。接著 實驗組與控制組同時進行 VB 程式設計教學。
參、VB 程式設計教學
以何種語言作為初學者學習的第一種語言向來有多種不同的看法,然而只要 能習得程式設計的基本觀念,使用任何程式語言皆可。我們的教學內容包含循序 結構、條件判斷以及迴圈。由於這三大結構為程序性程式語言共有的基本概念,
因此使用任何程式語言並無差異。由於授課教師具有多年的 Visual Basic 教學經 驗,故我們選擇 Visual Basic 進行教學。
VB 程式設計教學共 6 週。此部份係由參與實驗的授課教師依其程式設計的 授課經驗及需要自行規劃,以反應真實的授課情形,但研究者請其授課內容中至 少包含循序結構、條件判斷與迴圈等的程式規劃基本觀念。教學的單元內容包括 變數、運算式、循序、選擇結構、迴圈、副程式等(詳細的內容參見附錄二),
教材實施的方式主要為教師示範並講解程式的基本觀念,接著要求同學們能照著
老師示範的動作,依樣畫葫蘆地自己做一遍並且交出自己的作品。授課目標主要
在程式執行的理解,而非程式的設計規劃,學生只要能聽懂上課的內容,自己練
習一次,並不需要自己思考解決問題的步驟、方法。實驗組與控制組在 Visual Basic
的授課時間相同,教材內容也完全相同。
第五節 研究工具
本 研 究 使 用 之 工 具 包 括 : LEGO Mindstorms ( 如 第 三 節 所 述 )、 LEGO Mindstorms 教材、流程圖教材、VB 程式設計教材、成就測驗與問卷。各工具詳 述如下:
一、LEGO Mindstorms
本研究選用的機器人為 LEGO Mindstorms,詳細的內容如本章第三節所述。
二、LEGO Mindstorms 教材
實驗組在教學的前半段,需要使用 LEGO Mindstorms 建立該單元欲學習的概 念,故 LEGO Mindstorms 教材是為了配合課堂上使用 LEGO Mindstorms 而設計。
在使用 LEGO Mindstorms 之前,學生需要學會如何正確使用機器人,因此安排 一節課的時間讓學生接觸 LEGO Mindstorms 的軟硬體,包括 ROBOLAB 的使用、
傳輸程式到 LEGO Mindstorms、執行程式,並提供小程式供學生練習。
除了 LEGO Mindstorms 的簡介之外,還包括五個單元的課程,每單元均提供 範列讓學生手動操作 LEGO Mindstorms,觀察程式的執行,除了範例之外,還有 兩個練習題,希望藉由調整參數及動手操作,讓學生體會程式觀念,LEGO Mindstorms 教材如附錄三所示。
三、Visual Basic 教材
Visual Basic 教材是為了配合 Visual Basic 程式設計教學而編製,實驗組與控 制組使用相同的教材,教學內容由授課教師自行編製,每個單元闡述程式概念,
並提供範例作為使用情形的參考,說明範例使用的語法,最後提供練習題讓學生 上機練習。教材內容參見附錄二。
四、成就測驗
程式能力一般可以分為兩種,第一種是程式理解能力,給予一段程式,學生
能夠清楚明白這段程式的功能;另一種是程式設計能力,學生面對問題時,能夠
發展程式以解決問題的能力(Robins, Rountree & Rountree, 2003) 。測驗程式理解 能力的方式包括學生是否能追蹤並預測程式執行結果,或讓學生修改程式以解決 類似的問題;而測驗程式設計能力的方法,便是讓學生根據問題發展部分或整個 程式。
成就測驗主要在瞭解學生程式設計的學習成果,成就測驗分為兩部分,第一 部分是在 LEGO Mindstorms 教學結束後實施,該測驗的目的是為了瞭解學生使 用機器人輔助學習的結果,因此只有實驗組學生需要參與該測驗;第二部分是在 VB 程式設計教學結束之後實施,實驗組與控制組的學生都要進行測驗,目的是 為了瞭解學生在一般程式設計上的表現。對於程式設計的學習而言,程式設計能 力與程式理解能力是判斷學習結果的兩個主要依據,本研究的成就測驗分別包括 這兩部分。
(一)LEGO 成就測驗
LEGO 成就測驗共有六題,前三題是程式理解部分,後三題為程式設計部分,
測驗題目如附錄四所示,說明如下:
1、程式理解
LEGO 程式理解在於能夠追蹤程式的執行過程及預測執行結果。試題共包含 三題問答題:
第一題:測驗學生是否知道程式的執行順序,答對得 1 分。
第二題:測驗學生是否瞭解條件判斷結構。學生知道條件判斷結構會依條件 執行某一部分的程式,但是條件寫錯的得一分;條件正確者得二分。
第三題:測驗學生是否瞭解迴圈。具有迴圈重覆執行的概念,但是條件描述 錯誤者得 1 分;迴圈條件描述正確者得 2 分。
2、程式設計
LEGO 程式設計主要測驗是否能根據問題情境,設計程式以解決問題。試題
共三題,包括:
第一題:測驗學生是否明瞭循序結構,並用以解決問題。計分時視程式指令 的前後順序判斷是否具有循序的觀念,全部動作正確者得 2 分,若 順序正確,但設計的動作有錯誤,則得 1 分。
第二題:測驗學生能否根據題意,正確使用條件判斷結構。學生知道條件判 斷結構會依條件執行某一部分的程式,但是條件寫錯的得一分;若 條件正確,但條件成立下應執行的動作敘述有錯者得二分;若所有 動作皆描述正確者得三分。
第三題:測驗學生能否正確使用迴圈解決問題。具有迴圈重覆執行的概念,
但是條件描述錯誤者得 1 分;迴圈條件雖然描述正確,但是迴圈內 執行的動作有錯者得 2 分;所有迴圈動作皆描述正確者得三分。
(二)VB 成就測驗
VB 成就測驗共有六題,前三題是程式理解部分,後三題為程式設計部分,
測驗題目如附錄五所示。VB 成就測驗亦分為程式理解與程式設計能力,計分標 準與 LEGO 成就測驗相同。
五、問卷
問卷分別於兩個階段實施,第一次在 LEGO Mindstorms 程式設計課程結束 後,問卷內容在瞭解學生對機器人程式設計的態度,問卷內容如附錄六所示;第 二次於 Visual Basic 程式設計課程結束後,兩組均需填答,目的在瞭解學生對 VB 程式設計的態度,但給實驗組的問卷還包含 LEGO 與 Visual Basic 課程活動的比 較,問卷內容如附錄七、八所示。
(一)LEGO 問卷
LEGO 問卷內容主要在瞭解學生對教學、機器人軟硬體及學習程式設計的興 趣與態度;第 1~13 題為李克特 5 點式量表;第 14~18 題則為半開放式問題,但 保留空間讓學生填寫意見。LEGO 問卷內容包括:
第 1~2 題:瞭解對習題的看法。
第 3~5 題:瞭解學生對 ROBOLAB 程式編輯環境的看法。
第 6~8 題:瞭解機器人實際提供學生的幫助。
第 9~13 題:瞭解學生對於機器人程式設計學習的興趣及意願。
第 14~16 題:瞭解學生實作習題時遇到困難的原因及處理方式。
第 17~18 題:瞭解學生對 LEGO Mindstorms 程式設計活動的看法。
(二)VB 問卷
VB 問卷主要在瞭解學生在 Visual Basic 教學之後,對程式設計的看法與態 度。第 1~12 題採李克特 5 點式量表,13~15 題為開放式問題,第 9~12 及第 14 題,因為牽涉到機器人,所以只有實驗組需要回答,控制組則無這些題目。VB 問卷內容包括:
第 1~2 題:瞭解學生對 Visual Basic 程式編輯環境的看法。
第 3~6 題:瞭解學生對程式設計的觀感、興趣與信心。
第 7~ 8 題:瞭解學生經過 Visual Basic 程式設計課程後,是否具備演算法思 考的能力。
第 9~10、14 題:瞭解學生在學習 Visual Basic 程式設計課程時,是否能將機 器人程式設計所學融會貫通。
第 11~12 題:比較學生對機器人與 Visual Basic 程式設計的態度。
第 13 題:瞭解學生學習 Visual Basic 過程中遇到的困難。
第六節 實施步驟
本研究實驗實施時間共 4.5 週,實驗實施的程序如圖 3-2 所示,並分述說明 於後。
LEGO 成就測驗 LEGO 問卷
實驗組 控制組