國 立 台 灣 科 技 大 學 機 械 工 程 系
實 務 專 題 報 告
學 號 : B9603222
敞篷車窗升降機構之最佳化尺寸合成
專 題 生:張宏賓
指導教授:王勵群 博士
中華民國一百年一月
目錄
第一章、緒論 ... 1
第二章、構造分析... 4
2.1 Tokarz S.P.專利簡介 ... 4
2.2 Tokarz S.P.構造分析 ... 6
第三章、尺寸合成... 8
3.1 敞篷車窗機構之設計需求 ... 8
3.2 拘束式條件式之推導 ... 8
3.2.1 迴路方程式 ... 8
3.2.2 極限位置限制式 ... 12
3.2.3 不等式限制式 ... 12
3.3 尺寸合成之流程 ... 14
第四章、尺寸最佳化... 16
4.1 目標函數之建立 ... 16
4.2 最佳化流程 ... 21
第五章、數值範例... 23
4.1 數值範例(一) ... 23
4.2 數值範例(二) ... 25
4.3 數值範例(三) ... 26
4.2 數值範例比較 ... 28
第六章、結語 ... 30
參考文獻 ... 32
第一章 緒論
人類的第一台汽車早在一百多年前被發明,而最早的車窗就如同 今日一般的家用窗戶並沒有機構,當時關於車窗的專利大多為防盜 鎖。
直到 19 世紀初才逐漸被手搖車窗取代,近年來由於科技的進 步,電動車窗與手搖車窗產生結合,甚至取代了手搖車窗,但內部的 機構並未改變很多,只是以馬達作動來替代人力。
車窗升降機構大略分為五類,其機構以專利為例分別為:
Brown H. P.[3]如圖 1-1、Graf E.L.[6]如圖 1-2、Fenelon P.J.[5]
如圖 1-3、Sessa T.[9]如圖 1-4、Tokarz S.P.[10]如圖 1-5 等所設 計之機構。
圖 1-1 圖 1-2 (http://www.google.com/patents)
大部分的車窗機構雛形仍不脫離 Brown H.P.和 Graf E.L.所設計 的機構。但有些較重或大型的車窗則會用 Fenelon P.J.的設計。車 窗機構種類中以上述三種為最大宗。
圖 1-3 圖 1-4 (http://www.google.com/patents)
圖 1-5
(http://www.google.com/patents)
敞篷汽車邊窗大多和車頂連為一體,如圖 1-6[8]。但因為收藏 上的不便,因此便有許多不同的改良方式,其中以 Tokarz S.P.最為 完整獨立。
圖 1-6
(http://www.google.com/patents)
在上學期製作了「車窗升降機構之分析與比較」之專題。經過分 析比較後,這學期專題將對 Tokarz S.P.之敞篷車窗升降機構做最佳 化尺寸合成。
本文章節安排如下:第二章為構造分析;Tokarz S.P. 敞篷車窗 機構專利及構造分析。第三章為尺度合成;利用函數產生的方法進行 敞篷車窗機構的合成。第四章為尺度最佳化;建立目標函數並詳述最 佳化流程。第五章為數值範例與實作;以增加整體的機械利益為目標 函數進行尺度最佳化,進而提高其機械利益最小值。第六章為結論;
針對本文之言又結果做一總結。
第二章 構造分析
這一章要討論 Tokarz S.P.之敞篷車窗升降機構之專利簡介與分 析。有關於車窗機構的專利,在前一學期已針對資料庫做過搜尋與比 較,多數車窗機構採用 Graf E.L.[6]。這次我們將針對敞篷車窗升 降機構做最佳化。此章節將分析其構造。
2.1 Tokarz S.P.[10]專利簡介
這個專利是一個普遍的自動車邊窗升降機構(如圖 2-1),利用樞 軸為中心,以垂直的方式使窗戶由高位置轉動到低位置(如圖 2-2)。
窗戶為四分之一圓,可與敞篷機構一起作動。
近年來在汽車工業中,汽車外型趨勢為流線型,具有大曲率及斜 角,可是這使得邊窗也有曲率,這將會增加窗戶的收納空間,讓外型 較不美觀且減少乘坐的空間,於是便有許多經過改良的敞篷汽車機 構,此專利便是一例。
此外,邊窗大部分都具有外框,但外框增加了收納的困難和玻璃 的重量,也使得收納空間增加。因此,此專利便將窗框去掉只留玻璃 的部份。
總和以上所言此專利特別的地方在於,不和敞篷機構連結在一
起,並可獨立收納。
圖 2-1
(http://www.google.com/patents)
圖 2-2
(http://www.google.com/patents) 2.2 Tokarz S.P.構造分析
此為一車窗之升降機構,利用馬達帶動 83 件之扇形齒輪,作順 時針轉動以帶動第 73 桿,使得 59 桿以一銷作為圓心旋轉,並在 57 件上焊接的滑槽做滑動,用以帶動定在 57 件上四分之一圓的玻璃,
以 45 之樞軸為中心作旋轉,如圖 2-3 所示。
將上述之機構繪為一骨架圖如圖 2-4,由 2-1 式得自由度為 1,
並根據 Euler 公式(2-2 式)來求此機構之獨立迴路數目,並得知此機 構具有 2 個獨立迴路。
圖 2-3
(http://www.google.com/patents)
圖 2-4
m=3(n-1)-2
j 1
-j 2
(2-1) m = 3
(5-1)-2
5-1 = 1L =
n
j n 1
+1 (2-2) Where
n
j:接頭總數n 1
:桿件總數L = 6-5+1 = 2
此機構的 2 個獨立迴路,迴路一由桿 1、桿 2、桿 3 構成;迴路 二由桿 1、桿 3、桿 4、桿 5 所構成。
第三章 尺度合成
在本章中,進一步的探討敞篷車窗機構之基本設計需求。並以車 窗之開闔位置,用函數產生之兩點運動合成,來合成各桿件的尺寸。
3.1 敞篷車窗機構之設計需求
關於敞篷車窗機構之設計需求。首先為了讓操作便利,以單自由 度機構可簡便的單一步驟完成型待轉換之動作,應避免多自由度機構 容易造成使用者混淆的弊病;另外車窗開與闔為旋轉的方式使得兩種 型態夾角必頇為 80 度,亦需考慮車身門板收納空間與關閉位置。
3.2 拘束式條件式之推導
將 Tokarz S.P.[10]專利做為設計基底,將其開闔位置會成如圖 3-1 及圖 3-2。並讓窗戶開闔夾角為 80 度。因此我們用函數產生之兩 點運動合成來求得各桿長度。
3.2.1 迴路方程式
由 2.2 節知敞篷車窗機構有 2 個迴路以圖 4-6 分別寫為 Loop 1
和 Loop 2。
圖 3-1 圖 3-2
圖 3-3 Loop 1
a
b
d
c
Loop 2
e f c 1
x-component
a cosθ
2
+ b cosθ3
+ d cosθ1
= c cosθ4
(1) e cosθ + f cosθ6
= c1
cosθ4
(2)y-component
a sinθ
2
+ b sinθ3
+ d sinθ1
= c sinθ4
(3) e sinθ + f sinθ6
= c1
sinθ4
(4)Loop 1
(1)
2
+ (3)2
;設 X1
= d cosθ1
; X2
= d sinθ1
得(2 a c sinθ
2
+ 2 c X2
) sinθ4
+ (2 a c cosθ2
+ 2 c X1
) cosθ4
=2 a X
1
cosθ2
+ 2 a X2
sinθ2
+ X1 2
+ X2 2
+ a2
–b2
+ c2
設 A
1
= 2 a c sinθ2
+ K1
; A2
= 2 a c cosθ2
+ K2
;A
3
= 2 a X1
cosθ2
+ 2 a X2
sinθ2
+ X1 2
+ X2 2
+ a2
–b2
+ c2
且 K1
= 2 c X2
; K2
= 2 c X1
得
A
1
sinθ4
+ A2
cosθ4
= A3
(5)Loop 2
設 Y
1
= f cosθ6
; Y2
= f sinθ6
且由(2)得e =
cosY - cos
4 1 c 1
將 e 代入(4)得
c
1
cosθ sinθ4
– c1
sinθ cosθ4
= Y2
cosθ – Y1
sinθ設 B
1
= c1
cosθ ; B2
= c1
sinθ;B3
= Y2
cosθ – Y1
sinθ 得B
1
sinθ4
+ B2
cosθ4
= B3
(6) 對(5)、(6)做聯立方程得下 2 式sinθ
4
=1 2 2 1
3 2 2 3
B A B A
B A B A
(7)cosθ
4
=1 2 2 1
1 3 3 1
B A B A
B A B A
(8)代入 sin
2
θ + cos2
θ = 1 得(A
3
B2
– A2
B3
)2
+ (A1
B3
– A3
B2
)2
– (A1
B2
– A2
B1
)2
= 0 (9)由 Mathmatica 展開(9)得下(10)式
(10) 式中
3.2.2 極限位置限制式
在設計此車窗升降機構時,我們希望車窗關閉時能一次關到指定 位置,而不要先達到極限位置再回到關閉位置,因此限制關閉位置即 為極限位置。如圖 3-4 所示,利用餘弦定理可得限制條件如下:
0 )
14 cos(
) (
2 )
( b a 2 d 2 b a d c 2
(11)圖 3-4
3.2.3 不等式限制式
(1.)由於希望車窗在轉換形態的運動過程中,避免 a 、b、c、d 四連桿達到死點位置,故將四連桿設限定為 Grashof Class I
Mechanim,將最短桿 a 設為輸入桿,並設之為 1,將可使整組機構等 比例縮放,將
b
設為最長桿,因此其限制條件為a=1 (12)
a<b (13)
a<c (14)
a<d (15)
c<b (16)
d<b (17)
a + b < c + d (18)
(2.)此機構之迴圈 Loop2 為反曲柄滑塊機構,我們希望車窗從關 閉至開啟位置時,輸出桿能依順時針方向轉動;車窗從開啟至關閉位 置時,反之。其限制條件為 c
1
<f (19)c<c
1
(20)(3.)由於車身門板空間有限,接頭 1 的位置不能超過上方水平線 的位置,圖 3-5 所示,鏈線即為車身門板之範圍,以接頭 2 為基準, 至上方水平線的高度為 6.8,在尺寸合成時,固定桿 d 之限制式如下: d × sin50 ° < 6.8 d<8.88 (21)
圖 3-5
3.3 尺寸合成之流程
由(10)式可知此機構有 a、b、c、c
1
、d、f、θ、θ2
共八個設計 變數,而在做兩點合成時,我們將指定開啟及關閉位置的輸入角(θ2
) 與輸出角(θ),將此兩組角度代回(10)式,可得兩條方程式,加上極 限位置限制式,共可得三條方程式,及六個未知數,也由此可知此機 構將可做最佳化設計。以下針對上述之各組方程式,擬定一套尺寸合成之流程,藉由給 定輸入輸出角及自由指定設計變數,即可求得其餘未知設計變數之 值。詳細步驟如下:
步驟一:首先將開啟及關閉位置的輸入角(θ
2
)與輸出角(θ)代回(10) 式,得兩條方程式。步驟二:自由指定三個變數,代回上述二式及極限位置限制式,聯立 此三式,求解剩餘未知數。
步驟三:驗證各桿長是否符合不等式限制條件,若不合即重新計算。
表 3-1、敞篷車窗升降機構之各項參數
設計需求 θ、θ
2
指定的設計變數 a、b、d
求解的設計變數 c、c
1
、f第四章 尺寸最佳化
本章將利用未知的設計變數做為尺寸最佳化的設計參數。訂定其 目標函數,最後將目標函數、設計參數,同前一章的拘束條件,整理 成一組基因演算法(Genetic Algorithm)做為尺寸最佳化的流程,以 MATLAB 合成敞篷車窗升降機構的最佳尺寸。
4.1 目標函數之建立
一般而言,車窗機構皆希望達到操作時節省扭力的目的,故提升 最小機械利益(Mechanical Advantage)即為一重要的課題。本節將機 械利益做為尺寸最佳化的目標函數。
若運動過程中不考慮重力、磨擦力、與慣性力的影響,則輸入桿 與輸出桿之角速度比值即為機械利益,也可以用力矩之反比來表示,
如下所示
機械利益(M.A.) =
輸入力 輸出力=
in out
T
T
=ou t i n
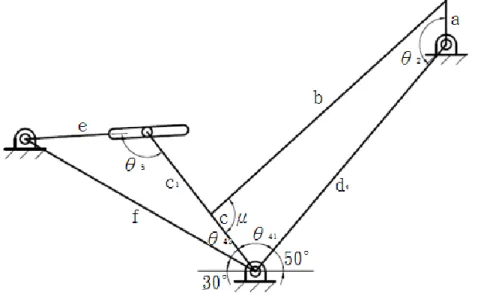
在 Tokarz S.P.型機構為一個四連桿機構與反曲柄滑塊所合成的 一個六連桿機構,求取機械利益時候,須先將兩個迴路的機械利益公 式個別求出,將其公式化成輸入角(此為輸入桿之轉角)的函數,將兩
個機械利益公式合併,最後利用四連桿之輸入角與反曲柄滑塊之輸出 角之間的角度關係,化成整個機構的機械利益公式。
圖 4-1 將圖 4-1 之四連桿畫成圖 4-2,求四連桿的機械利益:
圖 4-2
Using instant center
V
2 I24
=P1
ω2
V4 I24
=P2
ω4
V
2
= V4
= Pω = Pω4 2
=1 2
P P
From similar trangles
2 4
T T
=1 2
P P
=' c'
a
=
sin a
sin
c
(1)求其μ及β代入(1),首先由圖 4-2 求四連桿的傳輸角μ
b
2
+ c2
– 2 b c cosμ(θ2
) = a2
+ d2
– 2 a d cosθ2
= m2
將μ整理為的函數 θ
2
得(2)μ(θ
2
) = cos-1
[bc
21 (a
2
+ d2
- b2
- c2
– 2 a d cosθ2
)] (2)由圖 4-2 可知β為 θ
31
和 θ32
的補角β =
180 31 32
(3)利用餘弦和正弦定理來求 θ
31
,用 cos-1
函數,角度回傳的範圍在 0∘到 180∘之間,而使用 cos-1
函數,角度回傳的範圍在 -90∘到 90∘之間,因此無法找到 θ31
的確定角度,所以需用正切 tan 來找,如(4);在 matlab 則是用(5)的指令來求。而 θ
32
用餘弦定理求如(6)。cosθ
31
= - a m 2
1 (d
2
- m2
- a2
)sinθ
31
= sinθ2
md
tanθ
31
=3 1 3 1
cos sin
=2 2 2 2
a m d -sin d a 2
(4)θ
31
= atan2(2 a d sinθ2
﹐-d2
+ m2
+ a2
) (5)θ
32
= cos-1
[mb
21
(c2
- m2
- b2
)] (6) 將圖 4-1 之四連桿畫成圖 4-3,求反曲柄滑塊的機械利益:圖 4-3
4 6
T T
=6 4
=1 2
P
P
=
sin c
sin e
1
μ=90∘
6
T
T
=c sin
e
(7)求其 e 及β代入(7),以圖 4-3 用餘弦定理求 e(8),由瞬心所畫之圖 4-3 可求得β(10)。
e
2
= c1 2
+f2
-2 c1
f cosθ42
(8) 由圖 4-3 可知 θ42
其角度關係為(9)θ
42
= 260 2 31 32
(9)β =
90 5
(10) 由圖 4-3 可求知 θ5
如(10)θ
5
= cos-1
[f c 1 2
1
(f2
– c1 2
- e2
)] (11)將β與 e 帶回反曲柄滑塊機械利益(7)式中得(12)
4 6
T T
=5 1 sin 90 - c
e
(12)圖 4-1 之機械利益公式,由(1)式與(12)式整理可得 4-3 式
M.A. =
2 6
T T
=5 1 sin 90 - c
sin a
sin e c
(4-1)μ(θ
2
) = cos-1
[bc
21 (a
2
+ d2
- b2
- c2
– 2 a d cosθ2
)]β =
180 31 32
θ
31
= tan-1
(2 2 2 2
a m d -sin d a 2
)θ
32
= cos-1
[mb 2
1
(c2
- m2
- b2
)]目標函數為機械利益最佳化問題,因此將輸入角之運動範圍,以 1 度為單位做等分,將每個角度代入機械利益公式中,最後加總起來,
做為此最佳化之目標函數,其表示如下:
327
194
2
2
M.A.
J 1
(4-2)將(4-2)式的目標函數最小化,以達到敞篷車窗升降機構之尺寸 最佳化的目地。
4.2 最佳化流程
在對敞篷車窗機構做最佳化時,需符合第三章所提之拘束條件,
使最佳化所產生的機構尺寸適合其機構之用。由前節求得之目標函數 值與前章求得之拘束條件,可知此設計問題為非線性的最佳化問題,
難用解析的方法求得最佳解,因此我們利用具隨機多點平型式的基因
演算法(GA)來搜尋,以進行尺寸最佳化,在此最佳化方法中需先給定 目標函數及各設計變數之初始值,且設計變數要滿足上章之等式拘束 式與不等式拘束式。這類問題可能有許多區域最佳解,為了找出全域 最佳解,我們將以尺寸合成多組數值作為初始值,執行最佳化後,求 得各組目標函數,在比較其機械利益最小值。最佳化尺寸合成步驟如 下:
步驟一:以專利圖面的數值來給定已知的設計變數,帶入尺寸合成步 驟,即求出剩餘之設計變數,將求出的結果做為最佳化的初 始值,並設定各變數的上下邊界值。
步驟二:將所推導出的拘束方程式,做為尺寸最佳化之拘束條件 式,執行 MATLAB 之基因演算法的副程式,來做最佳化的演 算,可得最佳化後之設計變數。
步驟三:將所得知設變數做為新的初始值,以重複疊代的方式,
求得最小的目標函數值,即為此機構的最佳函數值
第五章 數值範例
在本章中,以第三章所推導的尺寸合成與第四章尺寸最佳化流程 中,實際以基因演算法合成出車窗機構的桿件尺寸,使機構之最小機 械利益提高,為了找出全域最佳解,我們將以尺寸合成多組數值作為 初始值,執行最佳化後,求得各組目標函數,在比較其機械利益最小 值。
5.1 數值範例(一)
各設計需求與設計參數之初始值,皆參考原專利機構尺寸作為尺 寸最佳化的初始值。如下表所列
設計需求 θ
(關閉位置)
θ(開啟位置)
θ2 (關閉位置)
θ2 (開啟位置)
數值 10∘ 291.3∘ 36∘ 263∘設計變數 a b c
數值 1.100 7.930 1.825
設計變數 c
1
d f數值 4.405 7.400 6.620 表 5-1、尺寸最佳化初始值
將設計需求與最佳化初始值代入(4-2)式得其目標值為 1.8707×
10
-5
,機械利益最小值為 0.707;而尺寸最佳化所得出的設計變數,經由(4-2)式計算後亦可得一目標函數值為 1.2969×10
-10
,機械利益最 小值為 0.7621。比較最佳化前後之結果,可以發現機械利益最小值 提高 7.79%。由圖 5-1 可以清楚看出機械利益最小值提高。設計變數 a b c
數值 1.000 8.584 1.943
設計變數 c
1
d f數值 4.125 7.999 6.000 表 5-2、尺寸最佳化結果
圖 5-1、尺寸最佳化前後之機械利益曲線
M.A.
θ
2
(輸入桿之轉角)最佳化前之 M.A. min =0.707
最佳化後之 M.A. min =0.7621
5.2 數值範例(二)
由第三章之尺寸合成步驟,合成一組尺寸作為尺寸最佳化的初始 值。如下表所列
設計需求 θ
(關閉位置)
θ(開啟位置)
θ2 (關閉位置)
θ2 (開啟位置)
數值 10∘ 290∘ 36∘ 263∘設計變數 a b c
數值 1.000 7.000 1.602
設計變數 c
1
d f數值 4.000 6.500 6.012
表 5-3、尺寸最佳化初始值
將設計需求與最佳化初始值代入(4-2)式得其目標值為 9.2895×
10
-7
,機械利益最小值為 0.6821;而尺寸最佳化所得出的設計變數,經由(4-2)式計算後亦可得一目標函數值為 9.4183×10
-11
,機械利益最 小值為 0.7620。比較最佳化前後之結果,可以發現機械利益最小值 提高 11.71%。由圖 5-2 可以清楚看出機械利益最小值提高。設計變數 a b c 數值 1.000 9.072 2.040
設計變數 c
1
d f數值 4.195 8.423 6.000 表 5-4、尺寸最佳化結果
圖 5-2、尺寸最佳化前後之機械利益曲線
5.3 數值範例(三)
由第三章之尺寸合成步驟,合成一組尺寸作為尺寸最佳化的初始 值。如下表所列
最佳化前之 M.A. min =0.6821
最佳化後之 M.A. min =0.7620 M.A.
θ
2
(輸入桿之轉角)設計需求 θ
(關閉位置)
θ(開啟位置)
θ2 (關閉位置)
θ2 (開啟位置)
數值 10∘ 291.8∘ 36∘ 263∘設計變數 a b c
數值 1.000 6.3 1.489
設計變數 c
1
d f數值 2.000 5.900 3.071
表 5-5、尺寸最佳化初始值
將設計需求與最佳化初始值代入(4-2)式得其目標值為 7.1824×
10
-8
,機械利益最小值為 0.6646;而尺寸最佳化所得出的設計變數,經由(4-2)式計算後亦可得一目標函數值為 9.0227×10
-12
,機械利益最 小值為 0.7651。比較最佳化前後之結果,可以發現機械利益最小值 提高 15.12%。由圖 5-2 可以清楚看出機械利益最小值提高。設計變數 a b c
數值 1.000 8.500 1.929
設計變數 c
1
d f數值 5.000 7.931 7.301 表 5-6、尺寸最佳化結果
圖 5-3、尺寸最佳化前後之機械利益曲線
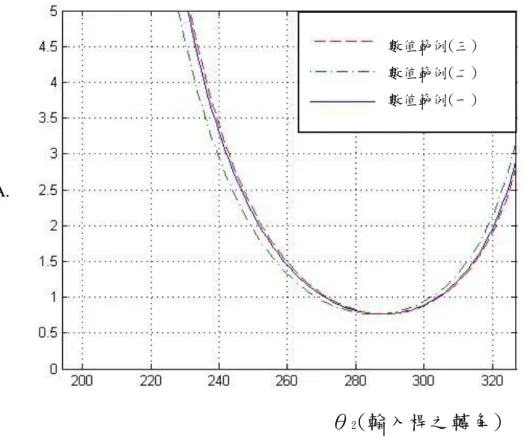
5.4 數值範例比較
比較三組尺寸最佳化後之機械利益最小值,數值範例(一)之機械 利益最小值為 0.7621;數值範例(二)之機械利益最小值為 0.7620;
數值範例(三)之機械利益最小值為 0.7651。三組尺寸最佳化後之機 械利益最小值皆大約為 0.76 上下,如圖 5-4,機構最佳化後機械利 益最小值僅能提高至此,滿足此機械利益最小值及其限制式之各桿桿 長,即為最佳解。
最佳化前之 M.A. min =0.6646
最佳化後之 M.A. min =0.7651 M.A.
θ
2
(輸入桿之轉角)圖 5-4、三組尺寸最佳化後之機械利益曲線
M.A.
θ
2
(輸入桿之轉角)數值範例(三)
數值範例(二)
數值範例(一)
第六章 結語
此次專題是由上學期之專題「車窗升降機構的分析與比較」裡選 出裡面其中一種較特別的車窗機構,即敞篷車窗升降機構做分析與設 計,最終目的是要對敞篷車窗升降機構作最佳化尺寸合成,首先以專 利圖面畫出機構構型,寫出迴路方程式,找出其設計變數數目,依照 其設計需求,寫出限制條件,最後利用函數產生與兩點運動合成,以 解析的方法合成一組機構尺寸。此專題我們使用基因演算法對合成出 的機構尺寸做最佳化,以提高最小機械利益,為了找出全域最佳解,
我們合成多組機構尺寸,並分別做最佳化,比較各組尺寸最佳化後最 小機械利益之結果。
以下為討論出幾種影響機械利益最小值之因素:
(一、)在尺寸最佳化時,合理的改變設計變數之上下限,會影響 最佳化的結果。
(二、)在尺寸合成時由於車身門板的空間有限,因此考慮(3-21) 式,但我們之前沒有考慮此限制時,曾經做出一組機械利益最小 值為 0.8504 之結果,或許可以經由改變車身門板外型的設計,
而獲得更好的機械利益最小值。
(三、)本專題以兩點運動合成來合成機構桿長,而我們選擇的兩 點為開啟位置即關閉位置,其角度是參考原專利指定的,若改變 其輸入角(θ
2
),或許能做出更好的設計。最後,本專題中,最佳化設計的目標函數為機械利益沒有考慮到 摩擦力、重力與慣性力的影響,因此機械利益會與實際狀況有誤差。
由於車身門板空間有限,在此專題只限定敞篷車窗升降機構不要超出 此範圍,或許在做最佳化時可以把空間的因素加進去,使得整組機構 可以用較少的空間達到省力之目的,而這些問題都值得進一步研究。
參考文獻
[1] Becker H.,“Window Lift Mechanism”,United States Patent, Patent NO.:4118893 10/10/1978
[2] Beauprez G.M.,“Window Lift Mechanism”,United States Patent, Patent NO.:5085004 2/4/1992
[3] Brown H.P.,“Window Operating Mechanism ”,United States Patent, Patent NO.:US1924706 4/5/1932
[4] Dupuy R.E.,“Vehicle Door Glass Regulator”,United States Patent, Patent NO.:5255470 10/26/1993
[5] Fenelon P. J.,“Window Lift Mechanism”,United States Patent, Patent NO.:US2007/0125000 A1
[6] Graf E.L.,“Window Regulator”,United States Patent, Patent NO.:US2010075 10/12/1933
[7] Halliwell M.C.,“Window Regulator”,United States Patent, Patent NO.:5027555 7/2/1991
[8] Moy et al.,“Apparatus And Method Of A Convertible Top With Hard Glass With Bottom Sealing”,United States Patent, Patent NO.:4784428 11/15/1988
[9] Sessa T.,“Cable actuated,car side window lifting mechanism”, United States Patent, Patent NO.:US4110935 9/5/1978
[10] Tokarz S.P.,“Window Lift Mechanism For An Automotive Vehicle”, United States Patent, Patent NO. : US5685596 11/11/1997