國立臺灣大學工學院機械工程學研究所 碩士論文
Department of Mechanical Engineering College of Engineering
National Taiwan University Master Thesis
脈波振幅調變驅動器之研製與性能測試比較 Pulse Amplitude Modulation Inverter Design and
Performance Comparison
譚仁傑 Jen-Chieh Tan 指導教授:楊士進 博士 Advisor : Shih-Chin Yang, Ph.D.
中華民國 108 年 7 月
誌謝
首先,誠摯的感謝指導教授 楊士進 教授,在楊教授細心的指導和適時的
提供建議下,除了讓我能夠深入瞭解馬達的各種理論知識以外,同時也學會了 馬達驅動軟體最主要的工具: Code Composer Studio,讓我在這次實驗中得到不 只是一份研究成品,也從中獲得了一股成就感。
值得一提的是實驗室的夥伴們,陳冠任學長,專題生黃靖倫學弟,還有同 屆的劉承鑫以及簡達任的幫助,在實驗的過程中,雖然曾遇到許多挑戰與挫 折,但是有實驗室的夥伴們的幫助讓我能夠一一克服了這些困難,以破斧成舟 的心態面對種種難題,勇於面對並成功解決,實屬難能可貴的經驗;這一年多 相處的時間裡,在不知不覺中重新認識了各式解決問題的方法、團隊合作精神 的態度以及誠實的面對自己所擔負的責任,才能在時間之內完成這份論文。
當然也要謝謝實驗室的學弟,我們能夠互相交流、鼓勵、共同成長,有類 似的題目、相同工具的組別,也能夠交換意見成為可靠的戰友,不時提供具有 建設性的建議供我們做為參考,專題研究才能順利進行 。
也要感謝我的女朋友陳思妤,在各種文書處理格式以及排版上能夠適時給 我建議,並且在我陷入低潮時能給我支持與鼓勵,讓我最終能夠順利完成此份 論文。
中文摘要
現今,永磁同步馬達的發展愈趨完善,不論是表面貼磁式或者內藏磁鐵式馬 達,在移動式動力系統上,都往高速化及輕量化的方向前進,為了達到上述目的,
除了從馬達本身結構縮小,亦需縮小驅動器的體積,故本論文將利用脈波振幅調 變(Pulse Amplitude Modulation-PAM)之技術驅動馬達,並利用其電感較高儲能密 度優勢有效地縮小變頻器電源端之穩壓電容,再推導其數學模型加以探討。此外,
考慮到脈波振幅調變無感測器驅動的應用,本論文亦提出了相關的角度估測方法。
在驅動器硬體架構上,脈波振幅調變系統前級需要由轉換器改變電壓,本論 文將採用雙向降壓型轉換器,透過數學模型探討並結合馬達驅動之使用條件,得 到轉換器電容與電感的設計依據;而無感測器驅動部分將比較傳統的30°與 90°延遲驅動法,並於不同負載狀態加以驗證;最後透過效率分析比較(1)向量控 制脈寬調變、(2)六步方波脈寬調變、(3)六步方波脈幅調變,分析其變頻器效率、
馬達效率以及整體效率,最後證實本論文所提出的脈幅調變在高速高切換頻率之 下,擁有較好的整體馬達驅動效率。
關鍵詞:直流電機、交流電機、脈寬調變、脈幅調變、效率分析、無感測器
ABSTRACT
Nowadays, both surface permanent magnet (SPM) machine and interior permanent magnet (IPM) machine are well-developed. Elevate the power density through increasing machine speed within a specified size becomes a major goal on traction applications. In addition, the inverter size should be reduced in order to achieve this goal. In this thesis, a pulse amplitude modulation (PAM) technology is developed to reduce the inverter size. By properly designing the LC filter, the volume of DC capacitor could be substantially reduced.
In general, PAM inverter contains a front-end DC-DC converter and LC filter to regulate bus voltage. The DC converter and LC filter are co-designed to minimize the inductance and capacitor size. Besides, the six-step trapezoidal driving scheme using 30-deg and 90-deg commutation angle are compared for PAM sensorless drive. The proposed trapezoidal PAM drive also compared with conventional sinusoidal FOC and trapezoidal BLDC driving scheme on a PM motor. It is concluded that trapezoidal PAM achieves the highest efficiency under high speed and high switching frequency operation.
Keywords:DC motor, AC motor, PWM, PAM, Efficiency, Sensorless.
目錄
口試委員會審定書... i
誌謝... iii
中文摘要... ii
ABSTRACT ... iv
目錄... v
表目錄... ix
圖目錄... xi
符號列表... iv
第1 章 緒論... 1
1.1 研究背景... 1
1.2 文獻回顧... 2
1.2.1 提升系統功率密度:馬達本體 ... 3
1.2.2 提升系統功率密度:變頻器 ... 6
1.2.3 提升系統功率密度: 變頻器被動元件 ... 12
1.2.4 PAM 之應用 ... 16
1.2.5 無感測器於PAM 之發展 ... 20
1.2.6 研究參考產品:Celeroton CC-100-1000[45] ... 22
1.3 論文目的... 25
1.4 論文大綱... 26
第2 章 降壓型轉換器數學模型及電感電容選擇... 27
2.1 降壓型轉換器數學模型... 27
2.2 轉換器數學模型應用於電感電容選擇... 33
第3 章 PAM 電路及無感測器驅動 ... 39
3.1 PAM 架構介紹 ... 39
3.2 變頻器開關之動態響應... 41
3.3 PAM 無感測器驅動法 ... 45
第4 章 實驗結果... 49
4.1 實驗平台... 49
4.2 實驗測試列表... 52
4.3 降壓型轉換器模型驗證... 53
4.4 𝟑𝟎°延遲與𝟗𝟎°延遲之無感測器驅動驗證 ... 56
4.5 馬達加速及負載變動實驗... 62
4.6 方波PAM、方波 PWM 以及弦波 FOC 效率比較 ... 66
第5 章 結論與未來工作... 73
5.1 結論... 73
5.2 未來工作... 74
參考文獻... 77
表目錄
表 1-1 各文獻之實驗方法與容值結果 ... 14
表 1-2PAM 與 FOC 之效率比較[8] ... 18
表 1-3CELEROTON CC-100-1000 相關參數 ... 25
表 4-1 大銀50W馬達規格 ... 49
表 4-2 磁滯型煞車器規格 ... 50
表 4-3 轉換器參數與計算值 ... 53
表 5-1 本論文研製之PAM 驅動器與 CELEROTON CC-100-1000 之比較 ... 74
圖目錄
圖 1.1 馬達能量流示意圖 ... 2
圖 1.2 有槽式馬達之轉子損失圖[8] ... 4
圖 1.3 無槽式馬達之轉子損失圖[8] ... 4
圖 1.4 不同結構與材料之定子損失圖[10] ... 5
圖 1.5 有槽式馬達轉子損失[11] ... 5
圖 1.6 無槽式馬達轉子損失[11] ... 5
圖 1.7 一般馬達變頻器示意圖 ... 7
圖 1.8A 組實驗路徑圖[18] ... 8
圖 1.9B 組實驗路徑圖[18] ... 8
圖 1.10C 組實驗路徑圖[18] ... 9
圖 1.11D 組實驗路徑圖[18] ... 9
圖 1.12 四組實驗項目之損失比較圖[18] ... 9
圖 1.13 驅動器效率圖[19] ... 9
圖 1.14 作者實驗平台圖[20] ... 10
圖 1.15 未加入查表補償波形圖[21] ... 11
圖 1.16 加入查表補償波形圖[21] ... 11
圖 1.17 未加入方波補償波形圖[22] ... 11
圖 1.18 加入方波補償波形圖[22] ... 11
圖 1.19 未加梯形波補償波形圖[23] ... 11
圖 1.20 加入梯形波補償波形圖[23] ... 11
圖 1.21 變頻器與薄膜電容[29] ... 13
圖 1.22 無主動阻尼控制波形圖[30] ... 14
圖 1.23 以主動阻尼控制波形圖[30] ... 14
圖 1.24 馬達測試波形圖[31] ... 15
圖 1.25 小電容之馬達控制方塊圖[32] ... 15
圖 1.26 不含穩定策略之波形圖[32] ... 16
圖 1.27 包含穩定策略之波形圖[32] ... 16
圖 1.28PAM 電路架構[34] ... 16
圖 1.29PAM 驅動系統[35] ... 17
圖 1.30PAM 實驗結果[35] ... 17
圖 1.31 馬達3390RPM滿載效率[36] ... 18
圖 1.32 馬達4600RPM滿載效率[36] ... 18
圖 1.33 六步方波PWM 波形圖[37] ... 19
圖 1.34PAM 之波形圖[37] ... 19
圖 1.35 雙DSP 之 PAM 電容電流漣波改善架構[38] ... 20
圖 1.36 不加抑制之電容電流曲線[38] ... 20
圖 1.37 加入抑制之電容電流曲線[38] ... 20
圖 1.38 利用反三角函數之無感測器驅動[43] ... 21
圖 1.39 用比較器之無感測器電路[44] ... 22
圖 1.40 無感測器驅動訊號[44] ... 22
圖 1.41 以降壓-升壓型轉換器為前級之 PAM 電路[47] ... 23
圖 1.42 降壓-升壓型轉換器與 PFC 架構[48] ... 23
圖 1.43 升壓型轉換器與PFC 架構[36] ... 23
圖 1.44CELEROTON CC-100-1000PAM 式高速馬達驅動器 ... 24
圖 1.45 參考產品變頻器訊號 ... 25
圖 1.46 參考產品驅動之馬達電壓電流訊號 ... 25
圖 2.1 非同步降壓型轉換器 ... 28
圖 2.2 同步降壓型轉換器 ... 28
圖 2.3 同步降壓型轉換器電感及開關波形圖 ... 28
圖 2.4 同步降壓型轉換器電感及電容波形圖 ... 31
圖 2.5 輸出電壓與電感最小值關係圖 ... 35
圖 2.6 輸出電壓與電容最小值關係圖 ... 36
圖 3.1PAM 整體硬體架構 ... 39
圖 3.2PWM 馬達六步控制訊號 ... 40
圖 3.3PAM 馬達六步控制訊號 ... 40
圖 3.4PAM 控制架構圖 ... 41
圖 3.5 馬達三相示意圖 ... 42
圖 3.6 變頻器換相示意圖 ... 45
圖 3.7 變頻器換相波形圖 ... 45
圖 3.8 變頻器三相對地電壓(輕載) ... 46
圖 3.9 變頻器三相對地電壓(重載) ... 46
圖 3.10 經低通濾波器之變頻器相對地電壓 ... 47
圖 3.11RC 濾波器 ... 48
圖 3.12RC 濾波器之波德圖 ... 48
圖 3.13 90°延遲無感測器驅動 ... 48
圖 4.1 磁滯型煞車器輸出電流力矩圖[55] ... 50
圖 4.2 馬達與負載裝置圖 ... 51
圖 4.3 同步直流降壓型轉換器 ... 51
圖 4.4 驅動控制系統 ... 52
圖 4.5 直流電阻式負載 ... 54
圖 4.6 使用電阻性負載之轉換器電壓電流波形圖 ... 55
圖 4.7 馬達於4500RPM無載之轉換器電壓電流波形圖 ... 55
圖 4.8 馬達於4500RPM滿載之轉換器電壓電流波形圖 ... 56
圖 4.9 利用30°延遲之馬達 4500RPM無負載波形圖 ... 57
圖 4.10 利用30°延遲之馬達 4500RPM加載波形圖 ... 58
圖 4.11 利用90°延遲之馬達 1000RPM無載波形圖 ... 59
圖 4.12 利用90°延遲之馬達 1000RPM滿載波形圖 ... 59
圖 4.13 利用90°延遲之馬達 3000RPM無載波形圖 ... 60
圖 4.14 利用90°延遲之馬達 3000RPM滿載波形圖 ... 61
圖 4.15 利用90°延遲之馬達 4500RPM無載波形圖 ... 61
圖 4.16 利用90°延遲之馬達 4500RPM滿載波形圖 ... 62
圖 4.17 馬達於50%負載下加速測試圖 ... 63
圖 4.18 加速測試圖之放大圖 ... 63
圖 4.19 馬達於4500RPM之步階負載測試圖 ... 64
圖 4.20 馬達於900RPM之步階負載測試圖 ... 65
圖 4.21 馬達於500RPM之步階負載測試圖 ... 65
圖 4.22 10KHZ變頻器效率比較圖 ... 67
圖 4.2320KHZ變頻器效率比較圖 ... 67
圖 4.2440KHZ變頻器效率比較圖 ... 68
圖 4.2510KHZ切換頻率之馬達效率比較圖 ... 69
圖 4.2620KHZ切換頻率之馬達效率比較圖 ... 69
圖 4.2740KHZ切換頻率之馬達效率比較圖 ... 70
圖 4.2810K切換頻率之整體效率比較圖 ... 71
圖 4.2920K切換頻率之整體效率比較圖 ... 71
圖 4.3040K切換頻率之整體效率比較圖 ... 72
圖 5.1 非連續導通模式下之電感電流 ... 75
圖 5.2 同步直流升壓型轉換器與馬達控制架構 ... 75
圖 5.3 加入功率因數校正之升壓型轉換器與馬達控制架構 ... 75
圖 5.4 有槽式馬達[11] ... 76
圖 5.5 無槽式馬達[11] ... 76
符號列表
𝐶𝑚𝑖𝑛 最小電容值。
𝐶𝑉𝑅 電容電壓漣波比。
𝐷 工作週期。
𝑒𝑎、𝑒𝑏、𝑒𝑐 馬達三相反電動勢
𝑓𝑠𝑤 開關切換頻率。
𝑖𝑎、𝑖𝑏、𝑖𝑐 馬達三相電流。
𝐼𝑜𝑢𝑡.𝑚𝑎𝑥 最大輸出電流。
𝐿 馬達三相電感。
𝐿𝐼𝑅 電感電流漣波比。
𝐿𝑚in 最小電感值。
𝑀 馬達互感。
𝑅 馬達三相電阻。
𝑅𝐷𝑆,𝑜𝑛,𝐻𝑆、𝑅𝐷𝑆,𝑜𝑛,𝐿𝑆 上臂與下臂開關導通電阻。
𝑡𝑜𝑛,𝐻𝑆、𝑡𝑜𝑓𝑓,𝐻𝑆 轉換器上臂導通時間。
𝑇𝑠𝑤 轉換器開關切換週期。
𝑉𝑎𝑛、𝑉𝑏𝑛、𝑉𝑐𝑛 馬達三相電壓。
𝑉𝑎𝑁、𝑉𝑏𝑁、𝑉𝑐𝑁 變頻器三相對地電壓。
𝑉𝑑𝑐,𝑖𝑛𝑣 變頻器電源電壓。
𝑉𝐻𝑆、𝑉𝐿𝑆 上臂與下臂開關導通壓降。
𝑉𝑖𝑛、𝑉𝑜𝑢𝑡 轉換器輸入與輸出電壓。
𝑉𝐿,𝑜𝑛,𝐻𝑆、𝑉𝐿,𝑜𝑓𝑓,𝐻𝑆 上臂導通時與不導通時電感電壓。
𝑉n 馬達中性點電壓。
θ 馬達驅動延遲角度
𝜑 變頻器對地電壓落後相位角度。
∆𝑖𝐶 電容電流變化量。
∆𝑖𝐿 電感電流漣波。
∆𝑖𝐿+、∆𝑖𝐿− 電感電流漣波上升量與下降量。
∆𝑄𝐶 電容電荷變化量。
∆𝑡 時間變化量。
∆𝑉𝐶 電容電壓漣波。
第1章 緒論
1.1 研究背景
現在二十一世紀是一個發展極為迅速的時代,在各方面成熟技術的發展下,
科技所帶來的便利性也是一日更勝一日,除了日新月異的科技外,同時也是一個 資訊爆炸的時代,任何發生在世界各角落的重大事件,我們幾乎可以立即從媒體 得知,科技始終來自於人性,而人性往往不會滿足於任何現況,因此科技愈是發 展快速,隨之而來的需求也愈多,進而衍生出其他更為人性化的設備。然而科技 的發展並非百利而無一害,現今人們的環保意識高漲,隨之產生的問題也逐一浮 現,在各國工業迅速的發展茁壯下,所衍生出的環保問題是由全球所承擔,也因 此各國制定了氣候變化綱要公約(Framework Convention on Climate Change, FCCC) 與京都議定書(Kyoto Protocol)等抑制碳排放量的國際條約,為了減少溫室氣體的 產生,其中一種替代方案即是再生能源,再生能源係以風、水力等無害於環境的 方法進行發電,雖然對於環境的損害十分低微,但其發電量相較於成熟的火力發 電卻也非常的小,發展上也較為緩慢,因此其二便是減少能源的浪費進而提升轉 換效率,而現今的能源發展也從傳統的燃料動力逐漸轉變為電力,並且加上相對 應的能源轉換效率規範,以實現有效利用的環保政策。現代的工業發展舉凡工具 機、家電或是汽車工業等,都逐漸由碳排放量較高的動力引擎發展為較為環保的 油電混合,甚至是純電動馬達,盡管只是將原本的化學能改由電能取代,但若考
慮到內燃機與發電廠的能源轉換效率,後者所提升的幅度將大大超越前者,而馬 達的應用範圍極為廣泛,包括瓦數較大的汽車工業、壓縮機,到低瓦數的吸塵器、
吹風機,甚至是幾十瓦的鑽孔機等皆是由馬達所帶動,而小瓦數的馬達有往愈來 愈高速的趨勢發展,不只可以提升功率密度,也可提高利益價值,而馬達的驅動 方法,主要分為脈波寬度調變(Pulse Width Modulation, PWM)與脈波振幅調變 (Pulse Amplitude Modulation, PAM)。
1.2 文獻回顧
馬達驅動系統的能量流一般是由電源供應變頻器足夠的電壓,而變頻器在依 照所控制之策略改變六臂開關之導通時間,提供馬達三相電壓與電流,最後由馬 達出力令負載達到應有的速度或力矩,其能量流如圖1.1 所示[1],然而整個過程 中並非理想狀態,故存在著能量損失,這些損失主要為轉換器損失[2](converter loss)、銅損(copper loss)、鐵芯損[3](core loss)與馬達轉子損失[4](rotor loss)。
Power Supply Inverter Motor
Converter Loss Copper Loss
Core Loss
Rotor Loss
Load
圖 1.1 馬達能量流示意圖
1.2.1 提升系統功率密度:馬達本體
存在於馬達本體中的損失主要為鐵芯損與馬達轉子損失,前者是因為導磁物
體受到變動磁場影響,在鐵芯中損耗的能量,又可以細分為導磁物體本身的磁滯 損(hysteresis loss)與電磁感應產生渦電流所造成的渦流損(eddy-current loss)[5, 6],
而後者為馬達定子電流產生的感應磁場與轉子永久磁鐵磁場交互作用下所產生 的能量損失。若要降低上述損失,可以透過改變永久磁鐵之種類[7]降低磁滯損以
及以矽鋼片之形式組成鐵芯進而提高電阻率和降低渦流損,而馬達轉子損失的部 分在文獻[8]中提到,其並非主要受到馬達空間諧波成分的影響,反而是受到馬達 有效氣隙(air gap)大小影響,圖 1.2 為有槽式(slotted)定子馬達之轉子損失與電流 諧波關係圖,而圖 1.3 則為無槽式(slotless)定子馬達之轉子損失與電流諧波關係 圖,從圖中可看出,一般由於有槽式馬達的有效氣隙較大,因此其轉子損失是大 於無槽式馬達的,而圖中轉子損失隨著電流諧波增加而飽和之現象,是由於電流 頻率愈高,則產生的渦電流阻止馬達電流進入導電區域的現象會愈明顯之緣故。
圖 1.2 有槽式馬達之轉子損失圖[8] 圖 1.3 無槽式馬達之轉子損失圖[8]
由上述可知,馬達的結構[9]對於本體效率有重大的影響,而磁性材料的選擇 亦是,隨著科技的進步,發展出了很多可用的磁性材料,在文獻[10]中,作者比 較了不同的鐵芯磁性材料以及馬達結構所產生的定子損失(stator loss),即銅損與
鐵芯損,如圖1.4 所示,在相同的磁性材料條件下,有槽式的馬達之定子損失皆 高於無槽式馬達;而在文獻[11]中,作者則比較了不同轉子永久磁鐵保護套 (retaining sleeve)[12]的磁性材料與馬達結構所產生的轉子損失,如圖 1.5 與圖 1.6 所示,盡管與轉速的趨勢相同,但無槽式馬達的轉子損失遠小於有槽式馬達,且 不同的磁性材料亦有相異的結果,由此可見,馬達元件材料之選擇也大幅影響了 其損失以及效率。
圖 1.4 不同結構與材料之定子損失圖[10]
圖 1.5 有槽式馬達轉子損失[11] 圖 1.6 無槽式馬達轉子損失[11]
然而磁性材料的選擇將影響馬達的成本,而馬達的結構則與其用途相關,一 般而言,高速馬達因使用力矩較小,故體積也往小型化發展,而其變頻器切換頻 率與電氣頻率皆較高,因此多使用輸出轉矩較小與較無齒槽轉矩(cogging torque) 的無槽式馬達降低定子與轉子損失;而較泛用的中低速馬達力矩需求較高體積也 較大,且因速度較低所以電氣頻率不高,故多使用成本較低的有槽式馬達。綜上
所述,馬達的結構與體積一般與其用途相關,故較難以縮小其體積,進而提升系 統之功率密度;而磁性材料的選擇亦與成本有大幅的相關性,因此提升系統效率 與其材料之選擇便需要做取捨。
1.2.2 提升系統功率密度:變頻器
除了馬達本體外,變頻器之體積與能量損耗也扮演非常重要的角色,一般馬
達變頻器如圖1.7 所示,而變頻器的能量損耗主要為轉換器損失,來自於供給馬 達三相電流電壓的六臂開關,這種主動元件(active component)[13]是透過低壓訊
號來決定大電路徑是否導通,然而現實中訊號的接收與路徑的導通並不會同時發 生,必定會有延遲,因此就產生了所謂的開關切換損失(switching loss)[14];同樣 地,理想的開關元件現實並不存在,因此在開關的路徑導通後便會有一導通阻抗 存在於元件路徑中,而導通後所流過的電流便會與此產生所謂的導通損失 (conduction loss)[15];除此之外,現在馬達多利用磁場導向控制(Field Oriented Control, FOC)驅動,而此法是利用空間向量脈波寬度調變(Space Vector Pulse Width Modulation, SVPWM)驅動六臂開關,為了避免上下臂同時導通,在控制端 多利用一死區時間(dead time)遲延兩開關之切換,這便會造成馬達電流具有諧波 成分,進而降低系統之效率。
Switch1
Vin C
Switch2 Switch3
Switch4
Switch5
Switch6
PhaseA PhaseB PhaseC
圖 1.7 一般馬達變頻器示意圖
若是從硬體元件端下手,現在較為普遍的開關為雙極性接面型電晶體 (bipolar junction transistor, BJT)、金屬氧化物半導體場效電晶體(Metal-Oxide- Semiconductor Field-Effect Transistor, MOSFET)與絕緣閘雙極電晶體(Insulated Gate Bipolar Transistor, IGBT),其中 BJT 具有較低的導通阻抗,但驅動電流較大 且開關速度較低;MOSFET 則是具有較快的切換速度與較小的驅動電流,但導通 阻抗較大;而IGBT 則是結合了前二者的優點,驅動電流與導通阻抗皆小,其切 換速度介於MOSFET 與 BJT 之間。近年來也發展出了較新的開關元件,碳化矽 (Silicon Carbide, SiC)與氮化鎵(Gallium Nitride, GaN)[16]所製造的功率元件,其結 合了上述優點,即導通阻抗小、開關切換速度快且體積更小,其中SiC 的技術發 展較為成熟,而GaN 則相對需要時間成長。
雖然寬能隙(Wide Band Gap, WBG)功率半導體元件尚未發展完全,但已經有 學者提出相關方法應用於馬達控制上,在文獻[17]中,作者在馬達驅動應用中利
用耐壓650V 電流 30A 的 GaN 元件代替原始元件,套用至 1.5kw 的三相變頻器 並以 100kHz 的切換頻率驅動,其結果為利用 GaN 元件後,變頻器之效率高達 97%;而在文獻[18]中,作者比較 GaN 元件變頻器之能量損失於不同控制方法,
其實驗項目如圖1.8 至圖 1.11 所示,其中 A 組為利用上下兩臂開關進行 PWM 切 換搭配原本回流路徑;B 組同為利用上下兩臂開關進行 PWM 切換,但利用二極 體替代元件之寄生二極體;C 組為單臂 PWM 切換搭配被動電流回流路徑;D 組 則為單臂PWM 切換,且以主動式切換改變電流回流路徑,最後結果如圖 1.12 所 示,利用外加二極體的B 組與主動式開關路徑的 D 組導通損失遠小於另外兩者,
有效地提升了變頻器的效率;最後在文獻[19]中,作者比較了 GaN 元件與串接 Si-IGBT 之驅動器效率,結果如圖 1.13 所示,由 GaN 組成的驅動器效率是高於 Si-IGBT 的。
圖 1.8 A 組實驗路徑圖[18] 圖 1.9 B 組實驗路徑圖[18]
圖 1.10 C 組實驗路徑圖[18] 圖 1.11 D 組實驗路徑圖[18]
圖 1.12 四組實驗項目之損失比較圖[18]
圖 1.13 驅動器效率圖[19]
除了縮小開關的切換損失以及導通損失外,亦有直接利用 WBG 元件縮小變 頻器本體之方法,在文獻[20]中,作者分析了 PWM 載子頻率與 WBG 型變頻器
體積大小之關係,最後將 300kHz 切換頻率且包含電磁相容性(Electromagnetic Compatibility, EMC)濾波器與散熱裝置的變頻器縮小了 81.6%,如圖 1.14 所示。
圖 1.14 作者實驗平台圖[20]
而因死區時間而造成電流諧波之影響,進而導致能量損失的項目中,雖然因
為開關硬體元件的非線性關係,導致數學模型難以建立,但亦有學者提出了相關 解決辦法,在文獻[21]中,因為元件的非線性關係,作者建立開關元件之電壓電 流表,並以查表之方式對變頻器輸出電壓進行補償,其補償與未補償之結果如圖 1.15 與 1.16;而文獻[22]中,作者則是以表格建立開關導通時間,決定開關電流
後再以方波作為變頻器電壓之補償方式,其結果如圖1.17 與 1.18 所示;最後文 獻[23]中,作者將變頻器建立數學模型後,在馬達鎖住轉子軸之狀態下,輸入 d 軸電壓觀察波形以找出飽和等效電阻,最後搭配梯形波補償變頻器輸出電壓,結 果如圖1.19 與 1.20 所示,以上三種方法皆對於馬達電流諧波有抑制之效果,如 此便可提升系統之效率。
圖 1.15 未加入查表補償波形圖[21] 圖 1.16 加入查表補償波形圖[21]
圖 1.17 未加入方波補償波形圖[22] 圖 1.18 加入方波補償波形圖[22]
圖 1.19 未加梯形波補償波形圖[23] 圖 1.20 加入梯形波補償波形圖[23]
1.2.3 提升系統功率密度: 變頻器被動元件
除了利用電壓補償方法以降低馬達電流諧波成分外,縮小變頻器之體積也可 以提升系統之功率密度,變頻器之元件之要包含六臂開關元件、閘極驅動(Gate Driver)電路、數位控制之小功率元件與儲能電容,而現今科技的發展,小功率元 件與閘極電路皆可以小型化包裝元件替代,開關部分如前述所說,可以較新的SiC
與 GaN 功率開關元件代替,而儲能電容則是用來儲存系統暫時性能量之元件,
故在固定切換頻率之情況下,較難以縮小其電容值。
盡管如此,由於電解電容的壽命、大體積與不穩定性[24-26],以及當變頻器 供給一恆定功率負載(Constant Power Load, CPL)時[27],會產生所謂的負阻現象 (negative impedance)[28],因有多數學者提出以小型的薄膜電容(film capacitor)代
替原本的電解電容,如圖1.21 所示[29],此外也有學者提出以控制策略解決小電 容所帶來的問題,在文獻[30]裡,作者以主動式阻尼(active damping)控制策略,
針對小電容值變頻器系統驅動內藏式永磁同步馬達,其結果如圖 1.22 與圖 1.23 所示,透過此控制方法,有效地改善了大電輸入端的電流,其薄膜電容值為20µF;
在文獻[31]中,作者提出不包含直流鏈儲能電容的硬體電路架構,並利用實際馬 達驗證其性能,其結果如圖1.24 所示,在所測試的速度域中,可進行步階載的測 試,馬達皆能正常地運轉,其薄膜電容值為25µF;而在文獻[32]裡,作者利用控 制端提出虛擬電阻(virtual resistor)的方法處理恆定功率負載的不穩定性,以及負
載快速變動所提出之策略,其控制策略與實測結果如圖1.25 至圖 1.27 所示,不 含穩定策略之結果於馬達加速過程中產生直流鏈(DC link)電壓過高的情況,加入 穩定性之方法後,變頻器之直流鏈電壓便穩定許多,使馬達能夠繼續加速,其薄 膜電容值為9µF。以上實驗方法與容值結果如表 1-1 所示,雖然縮小電容值後,
能透過控制方法使整體系統穩定進而縮小系統體積,但原本良好的效率同時也受 到了影響,這對於提升系統之功率密度需要加以確認。
Film Capacitor
圖 1.21 變頻器與薄膜電容[29]
表 1-1 各文獻之實驗方法與容值結果
文獻 薄膜電容值 使用策略 馬達額定功率
[29] 20µF 主動式阻尼控制 1kW
[30] 25µF 矩陣轉換器架構 7. 5kW
[31] 9µF 虛擬電阻控制 1. 8kW
圖 1.22 無主動阻尼控制波形圖[30] 圖 1.23 以主動阻尼控制波形圖[30]
圖 1.24 馬達測試波形圖[31]
圖 1.25 小電容之馬達控制方塊圖[32]
圖 1.26 不含穩定策略之波形圖[32] 圖 1.27 包含穩定策略之波形圖[32]
1.2.4 PAM 之應用
馬達驅動除了一般常見的弦波 FOC 與六步方波 PWM 外,還包含了脈波幅 值調變驅動(Pulse Amplitude Modulation, PAM)[33],如圖 1.28 所示[34],此方法 之電路架構是於變頻器前端加一級轉換器,並透過控制轉換器之開關導通時間 改變變頻器之輸入電壓,藉此達到控制馬達轉速與力矩之目的。
圖 1.28 PAM 電路架構[34]
PAM 控制一般用於高速馬達之驅動,由於馬達在高速狀態下,較大的電氣
頻率與切換頻率導致馬達有嚴重的切換損失,而PAM 前端之開關元件只包含上
臂與下臂兩個,相對於變頻器本身損失較小,而變頻器之六臂開關則是依照馬 達速度取決於其切換頻率。在文獻[35]中,作者便是以 PAM 驅動極高轉速的馬 達,其驅動系統與實驗結果如圖1.29 與 1.30 所示,從圖中可以看出,在極高速
的馬達驅動中,其100W 的變頻器之體積與火柴差不多,而馬達電流則是與六
步方波PWM 之波形相似。
圖 1.29 PAM 驅動系統[35] 圖 1.30 PAM 實驗結果[35]
而 PAM 之整體效率部分,雖然有效降低了變頻器效率的部分,但由於是以 六步方波驅動馬達,因此也降低了馬達的效率。在文獻[36]中,作者比較了 PAM
與六步方波PWM 之整體效率,其結果如圖 1.31 與圖 1.32 所示,從圖中可以看 出不論是在何種轉速下,PAM 之效率皆高於六步方波 PWM,而六步方波 PWM 則因為切換頻率的不同而有不同的結果;而在文獻[8]中也有提到 PAM 與 FOC 之 效率比較,其比較結果如表1-2 所示,無論是有槽式或是無槽式馬達,PAM 之變 頻器損失皆低於FOC,但同時 PAM 之馬達轉矩漣波也較大,而在無槽式馬達中,
PAM 的馬達損失則小於有槽式馬達;最後在文獻[37]中,作者比較了六步方波
PWM 與 PAM 之馬達驅動性能,如圖 1.33 與 1.34 所示,馬達在相近的轉速下,
六步方波PWM 由於其高切換頻率的影響,使相電流具有高頻成分,而 PAM 則 不具有高頻諧波。
圖 1.31 馬達 3390rpm 滿載效率[36] 圖 1.32 馬達 4600rpm 滿載效率[36]
表 1-2 PAM 與 FOC 之效率比較[8]
圖 1.33 六步方波 PWM 波形圖[37] 圖 1.34 PAM 之波形圖[37]
此外,亦有學者提出了 PAM 相關電路的改善,文獻[38]中,作者針對 PAM 直流鏈電容的電流漣波提出抑制方法,以兩個數位信號處理器(Digital Signal Processor, DSP)與速度控制變頻器電壓與固定調變指標(modulation index)之方式,
改善電容之電流漣波,其如圖1.35 所示,結果如圖 1.36 與 1.37 所示,相較於未 補償之前穩定且降低許多;而在文獻[39]中,作者則是利用軟切換(soft-switching) 方法於PAM 之功率因數校正(Power Factor Correction, PFC)電路中,藉此降低 PFC 電路之切換損失與降低電磁干擾(Electromagnetic Interference, EMI)。
圖 1.35 雙 DSP 之 PAM 電容電流漣波改善架構[38]
圖 1.36 不加抑制之電容電流曲線[38] 圖 1.37 加入抑制之電容電流曲線[38]
1.2.5 無感測器於 PAM 之發展
由於現今的馬達在某些狀態下無法添加編碼器(encoder),例如浸油的渦輪機,
無感測器驅動便顯得相對重要,一般利用d 軸與 q 軸之反電動勢進行估測之無感
測器驅動[40, 41]多適用於以弦波 FOC 驅動之馬達,而 PAM 驅動與六步方波 PWM 相似,因此可以利用反電動勢取代位置霍爾訊號(Hall signal)[42],再以其 作為變頻器開關之驅動訊號。
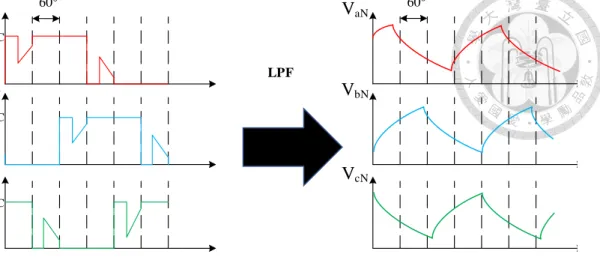
然而由於馬達中性點一般不好取得,故可利用變頻器對地之電壓訊號進行無 感測器驅動,在文獻[43]裡面,作者利用變頻器對地之電壓訊號經由低通濾波器 (low pass filter, LPF)與濾過後的相電流相減估測出馬達反電動勢,之後經由克拉 克轉換(Clarke Transformation)與反正切三角函數之運算,得到馬達的估測位置信
號,其架構如圖 1.38 所示,由於此方法中用到了兩個低通濾波器以及反三角函 數之運算,因此會使系統的頻寬(band width)降低且運算較慢。
圖 1.38 利用反三角函數之無感測器驅動[43]
而文獻[44]中,作者先利用低通濾波器處理三相變頻器對地之電壓,再經由 比較器得到估測霍爾訊號,最後利用隔離電路將訊號輸送到六臂開關之閘極電路,
其電路與估測霍爾訊號如圖1.39 與 1.40 所示,雖然作者利用 Y 接馬達之線電壓 會與相電壓差30°之特性,但是缺點在於此電路需要三個額外的比較器,增加了 系統之成本。
圖 1.39 用比較器之無感測器電路[44] 圖 1.40 無感測器驅動訊號[44]
1.2.6 研究參考產品:Celeroton CC-100-1000[45]
由於 PAM 電路須外加一前級轉換器電路,而轉換器電路之拓樸有非常多種,
像是文獻[46, 47]中,作者們利用降壓-升壓型轉換器(buck-boost converter)作為 PAM 前級電路驅動馬達,如圖 1.41 所示,而文獻[48]中,除了降壓-升壓型轉換 器外,作者還使用了圖1.42 的 PFC 電路使整體系統效率具有更高的水準,文獻 [36]中,作者則是使用了升壓型轉換器(boost converter)與 PFC 電路提供 PAM 變 頻器能量,如圖1.43 所示。
圖 1.41 以降壓-升壓型轉換器為前級之 PAM 電路[47]
圖 1.42 降壓-升壓型轉換器與 PFC 架構[48]
圖 1.43 升壓型轉換器與 PFC 架構[36]
而本論文則是採用降壓型轉換器[49-52]作為 PAM 電路之前級,關於降壓型 轉換器之電路模型則是參考了文獻[53],以連續導通模式(Continuous-Conduction
Mode, CCM)下的電感電流作為假設,並推導出同步降壓型轉換器之電感與電容 之最小值,而後透過實驗驗證不同負載電流下的電感電流漣波與電容電壓漣波。
此外,本論文亦利用 Celeroton CC-100-1000 型號 1kW 在 100V 的 PAM 架構 28 萬轉馬達驅動電路做為參考產品,如圖 1.44 所示,此電路也是利用同步降壓 型轉換器作為PAM 驅動電路之前級,其相關參數如表 1-3 所示,經由 PAM 前級 驅動電路的加入,可以發現其直流電容的體積大幅縮小,本研究試圖用此驅動器 控制一顆 12V 高速馬達,在轉速為 30krpm 之狀態下,得到其變頻器效率約為 95%,其相關波形如圖 1.45 與 1.46 所示,而其驅動之方法則是參考文獻[54]。
圖 1.44 Celeroton CC-100-1000 PAM 式高速馬達驅動器
表 1-3 Celeroton CC-100-1000 相關參數
參數 量值
直流鏈電感 157.08µH
直流鏈電容 22.56µF
開關切換頻率 80kHz
額定輸入電壓 24-100V
額定功率 1000W
圖 1.45 參考產品變頻器訊號 圖 1.46 參考產品驅動之馬達電壓電 流訊號
1.3 論文目的
本論文的目的在探討將文獻[53]的數學模型應用於 PAM 系統,並透過此模
型縮小電路之電容容值與體積,此外針對PAM 方波驅動系統,亦提出新的無位
置感測器驅動方法,最後透過實驗將前者逐一驗證,並且與文獻討論的高效率弦 波FOC 與方波 PWM 進行驅動整體效率比較。論文主要的研究項目如下:
(1) 根據文獻回顧提出的方法,進行驗證,達到縮小變頻器容值及體積之效果。
(2) 利用更少的被動元件及硬體,發展 PAM 架構之無感測器驅動理論。
High side signal
Vin
Vout Low side signal
20V
10V
10us/div
30000rpm
VaN
VcN
Phase A current VbN
10V
1A 10V
10V
(3) 推導直流轉換器之數學模型,決定 PAM 驅動器之電感值與電容值之選擇。
(4) 利用加速測試與負載變動測試,驗證所提出之 PAM 無感測器驅動效能。
(5) 弦波 FOC、方波 PWM 與方波 PAM 不同驅動方法綜合比較。
(6) 與參考產品 Celeroton 高速馬達驅動器整體規格比較。
1.4 論文大綱
本論文共分為五個章節:
第一章 本論文研究背景與提升系統功率密度和無感測驅動相關文獻回顧。
第二章 推導降壓型轉換器數學模型與應用。
第三章 PAM 電路及無感測器驅動理論。
第四章 實際系統之理論驗證與效率比較。
第五章 結論與未來研究方向。
第2章 降壓型轉換器數學模型及電感電容選擇
本論文是以脈波振幅調變(PAM)作為馬達驅動架構,此架構與一般脈波寬度 調變(PWM)不同,需於變頻器前端串接一級直流電壓轉換器,達到馬達轉速與工 作週期之電壓控制,根據前章文獻回顧以及 Celeroton 參考產品,將選用降壓型 轉換器之拓樸作為參考架構,而本章將推導此降壓型轉換器數學模型,並將其應 用於脈波振幅調變,進行濾波器電感與電容值之選擇,以達到縮小容值與體積進 而提升驅動器功率密度之作用。
2.1 降壓型轉換器數學模型
降壓型轉換器一般分為用二極體整流的非同步降壓型轉換器以及採用電晶體
替代的同步降壓型轉換器,如圖2.1 與 2.2 所示,由於一般非同步降壓型轉換器 上的二極體,使得能量只能單方向從電源端到輸出端,而因馬達剎車時會有大 量的機械能量回流,因此並不適用於馬達驅動。故本論文選用後者的同步降壓 型轉換器,由雙向導通的電晶體取代單向導通的二極體,便可使馬達急停的反 電動勢能量消耗掉,而本節將採用並推導其於連續導通模式下的數學模型。
圖 2.1 非同步降壓型轉換器 圖 2.2 同步降壓型轉換器
圖 2.3 同步降壓型轉換器電感及開關波形圖
圖 2.3 說明同步降壓型轉換器於連續導通模式下的電感及開關波形圖,根據 圖2.2 及 2.3,𝑇𝑠𝑤為切換週期,由上臂導通時間𝑡𝑜𝑛與上臂關閉時間𝑡𝑜𝑓𝑓組成,而 上臂開關與下臂開關的訊號必須相反,工作週期𝐷則為
𝐷 = 𝑡𝑜𝑛,𝐻𝑆
𝑡𝑜𝑛,𝐻𝑆+ 𝑡𝑜𝑓𝑓,𝐻𝑆 ≅ 𝑉𝑜𝑢𝑡
𝑉𝑖𝑛 (2.1)
其中下標HS 表示上臂開關,𝑉𝑜𝑢𝑡為輸出電壓,𝑉𝑖𝑛為輸入電壓。此外藉由電感電 壓方程式
𝑉𝐿,𝑜𝑛= 𝐿𝑑𝑖
𝑑𝑡≅ 𝐿 ∆𝑖𝐿
𝑡𝑜𝑛,𝐻𝑆 (2.2)
其中𝑉𝐿,𝑜𝑛為上臂導通時電感電壓、∆𝑖𝐿為電感電流漣波,將其移項後可推估最小 電感值
𝐿𝑚in =𝑉𝐿,𝑜𝑛× 𝑡𝑜𝑛,𝐻𝑆
∆𝑖𝐿 (2.3)
(2.3)式中的𝐿𝑚in定義為最小電感值,而由圖2.2 所表示,𝑉𝐿,𝑜𝑛可推導為
𝑉𝐿,𝑜𝑛 = 𝑉𝑖𝑛− 𝑉𝐻𝑆− 𝑉𝑜𝑢𝑡 (2.4)
其中𝑉𝐻𝑆為上臂開關導通電壓降,與開關導通電阻𝑅𝐷𝑆,𝑜𝑛,𝐻𝑆及導通電流成正比。
而工作週期𝐷亦可由開關切換頻率𝑓𝑠𝑤表示為
𝐷 =𝑡𝑜𝑛,𝐻𝑆
𝑇𝑠𝑤 = 𝑡𝑜𝑛,𝐻𝑆× 𝑓𝑠𝑤 (2.5)
將(2.4)與(2.5)兩式帶入(2.3)式便可得到
𝐿𝑚𝑖𝑛= (𝑉𝑖𝑛− 𝑉𝐻𝑆− 𝑉𝑜𝑢𝑡) × 𝐷
∆𝑖𝐿× 𝑓𝑠𝑤 (2.6)
其中電感的電流漣波∆𝑖𝐿可由電感電流漣波比𝐿𝐼𝑅,即為電感電流漣波之峰對峰 值和直流值之比例,與最大輸出電流𝐼𝑜𝑢𝑡.𝑚𝑎𝑥表示為
∆𝑖𝐿 = 𝐿𝐼𝑅 × 𝐼𝑜𝑢𝑡,𝑚𝑎𝑥 (2.7)
並將上式帶入(2.6)式後得
𝐿𝑚𝑖𝑛= (𝑉𝑖𝑛− 𝑉𝐻𝑆− 𝑉𝑜𝑢𝑡) × 𝐷
𝐿𝐼𝑅 × 𝐼𝑜𝑢𝑡,𝑚𝑎𝑥× 𝑓𝑠𝑤 (2.8) 由於連續導通模式穩態下電感電流漣波的上升量∆𝑖𝐿+及下降量∆𝑖𝐿−可假設一 樣,故∆𝑖𝐿+及∆𝑖𝐿−分別可表示為
∆𝑖𝐿+ =𝑉𝐿,𝑜𝑛,𝐻𝑆
𝐿 × 𝑡𝑜𝑛,𝐻𝑆 (2.9)
∆𝑖𝐿−= 𝑉𝐿,𝑜𝑓𝑓,𝐻𝑆
𝐿 × 𝑡𝑜𝑓𝑓,𝐻𝑆 (2.10)
其中上臂開關不導通時的電感電壓差𝑉𝐿,𝑜𝑓𝑓,𝐻𝑆可以表示為
𝑉𝐿,𝑜𝑓𝑓,𝐻𝑆 = 𝑉𝑜𝑢𝑡+ 𝑉𝐿𝑆 (2.11)
𝑉𝐿𝑆為下臂開關導通壓降,與導通電阻𝑅𝐷𝑆,𝑜𝑛,𝐿𝑆與導通電流成正比。上臂開關的 導通時間𝑡𝑜𝑛,𝐻𝑆與不導通時間𝑡𝑜𝑓𝑓,𝐻𝑆可以分別表示為
𝑡𝑜𝑛,𝐻𝑆 = 𝐷
𝑓𝑠𝑤 (2.12)
𝑡𝑜𝑓𝑓,𝐻𝑆 =1 − 𝐷
𝑓𝑠𝑤 (2.13)
利用(2.9)式與(2.10)式的相等關係後,將(2.4)、(2.11)、(2.12)與(2.13)四式帶入(2.9) 與(2.10)兩式可得到
𝐷 = 𝑉𝑜ut+ 𝑉𝐿S
𝑉𝑖𝑛− 𝑉𝐻𝑆+ 𝑉𝐿𝑆 (2.14) 最後將上式帶入(2.8)式後,可以得到
𝐿𝑚𝑖𝑛 = ( 𝑉𝑖𝑛− 𝑉𝐻𝑆− 𝑉𝑜𝑢𝑡
𝐿𝐼𝑅 × 𝐼𝑜𝑢𝑡,𝑚𝑎𝑥× 𝑓𝑠𝑤) × ( 𝑉𝑜𝑢𝑡+ 𝑉𝐿𝑆
𝑉𝑖𝑛− 𝑉𝐻𝑆+ 𝑉𝐿𝑆) (2.15) 由於功率元件開關的電壓降𝑉𝐻𝑆與𝑉𝐿𝑆相較於驅動器輸入電壓𝑉𝑖𝑛及輸出電壓𝑉𝑜𝑢𝑡 通常很小,因此(2.15)式可以藉由忽略上下臂開關的電壓降簡化得到
𝐿𝑚𝑖𝑛 ≅ (𝑉𝑖𝑛− 𝑉𝑜𝑢𝑡) × 𝐷
𝐿𝐼𝑅 × 𝐼𝑜𝑢𝑡,𝑚𝑎𝑥× 𝑓𝑠𝑤 (2.16) 接下來會繼續說明電容容值推導,由於電感上的電流可以分為直流與交流兩 部分,交流部分理論上會藉由轉換器輸出端的電容旁路消散掉,因此便可利用此 特性進行推導,圖2.4 為同步降壓型轉換器的電感及電容的波形圖。
圖 2.4 同步降壓型轉換器電感及電容波形圖
根據電容的電流方程式
𝑖𝐶 = 𝐶 ×∆𝑉𝐶
∆𝑡 (2.17)
並將其移項後可得
∆𝑡 × 𝑖𝐶 = 𝐶 × ∆𝑉𝐶 = ∆𝑄𝐶 (2.18)
其中∆𝑄𝐶為電容的電荷變化量,∆𝑉𝐶為電容電壓漣波,而∆𝑡為時間變化量,藉由圖 2.4 波形圖,可將∆𝑄𝐶表示為
∆𝑄𝐶 =1
2× ∆𝑖𝐶× ∆𝑡 (2.19) 其中時間變化量∆𝑡可以藉由上臂開關導通時間𝑡𝑜𝑛,𝐻𝑆、不導通時間𝑡𝑜𝑓𝑓,𝐻𝑆與(2.12) 及(2.13)兩式化簡為
∆𝑡 =1
2× 𝑡𝑜𝑛,𝐻𝑆+1
2× 𝑡𝑜𝑓𝑓,𝐻𝑆=1 2× 𝐷
𝑓𝑠𝑤+1
2×1 − 𝐷
𝑓𝑠𝑤 = 1
2 × 𝑓𝑠𝑤 (2.20) 電容的電壓漣波∆𝑉𝐶可以利用電容電壓漣波比𝐶𝑉𝑅,即為電容電壓漣波的峰對峰 值和直流值之比例,與輸出電壓𝑉𝑜𝑢𝑡表示為
∆𝑉𝐶 = 𝐶𝑉𝑅 × 𝑉𝑜𝑢𝑡 (2.21)
而電容電流變化量∆𝐼𝐶可以利用電感電流漣波∆𝑖𝐿表示為
∆𝑖𝐶 = ∆𝑖𝐿
2 (2.22)
將(2.20)與(2.22)帶入(2.19)後,可得到
∆𝑄𝐶 =1 2×∆𝑖𝐿
2 × 1
2 × 𝑓𝑠𝑤= ∆𝑖𝐿
8 × 𝑓𝑠𝑤 (2.22) 再將(2.18)帶入後得到
∆𝑖𝐿
8 × 𝑓𝑠𝑤 = 𝐶𝑚𝑖𝑛× ∆𝑉𝐶 (2.23)
最後將上式移項並帶入(2.7)與(2.21)兩式後,可得到
𝐶𝑚𝑖𝑛 = 𝐿𝐼𝑅 × 𝐼𝑜𝑢𝑡,𝑚ax
8 × 𝑓𝑠𝑤× 𝐶𝑉𝑅 × 𝑉𝑜𝑢𝑡 (2.24) 由於本論文旨在縮小驅動器被動元件體積及提升其功率密度,因此前級同步
降壓型轉換器電感與電容的取捨將格外重要,而本節透過同步降壓型轉換器的數 學模型,推導出最小電感值與最小電容值的方程式(2.16)與(2.24),將於下一小節 利用上述兩式,進行電感值與電容值的分析與選擇。
2.2 轉換器數學模型應用於電感電容選擇
前一小節所推導之數學模型是應用於電阻性負載,而本論文是將轉換器應用 在變頻器前端,以達到利用開關電壓工作週期進而控制馬達速度之目的,而馬達 本身根據不同的運轉條件會有不同的功率需求,例如重載高轉速下與輕載低轉速 下的馬達會需要不同的開關工作週期,即不同的輸出電壓。因此本節將化簡前一 節所推導出的模型,根據不同的操作條件,分析電感值與電容值的選擇。
從(2.16)式可以看出,電感最小值的決定是由輸入電壓𝑉𝑖𝑛、輸出電壓𝑉𝑜𝑢𝑡和 工作週期𝐷等條件決定,一般而言,切換頻率𝑓𝑠𝑤在整個系統中是固定的,不會因 馬達運轉條件不同而有所改變,而工作週期與輸入及輸出電壓有直接關係,因此 將(2.1)式帶入(2.16)式可得到
𝐿𝑚𝑖𝑛≅ (𝑉𝑖𝑛− 𝑉𝑜𝑢𝑡) × 𝑉𝑜𝑢𝑡
𝐿𝐼𝑅 × 𝐼𝑜𝑢𝑡,𝑚𝑎𝑥× 𝑓𝑠𝑤× 𝑉𝑖𝑛 (2.25) 再者,由於直流轉換器的輸出電流取決於馬達的轉速及負載,且電感電流漣波只 與電感及其跨壓相關,若馬達在高負載情況下的轉換器輸出電壓與低負載情況下 的轉換器輸出電壓相同,兩者將具有相同的電感電流漣波∆𝑖𝐿,但是會因為負載 電流不同而具有差異極大的電感電流漣波比𝐿𝐼𝑅,因此將前一小節(2.7)式帶入上 式便可得到(2.26)式,以直接決定電感電流漣波∆𝑖𝐿的方式來選擇電感值。
𝐿𝑚𝑖𝑛≅ (𝑉𝑖𝑛− 𝑉𝑜𝑢𝑡) × 𝑉𝑜𝑢𝑡
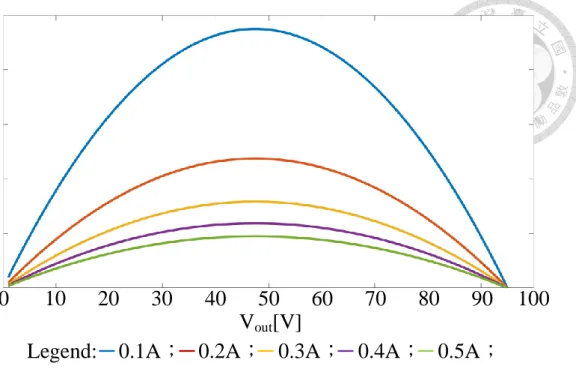
∆𝑖𝐿× 𝑓𝑠𝑤× 𝑉𝑖𝑛 (2.26) 由上式可以看出,由於切換頻率𝑓𝑠𝑤與輸入電壓𝑉𝑖𝑛均不會隨運轉狀態不同而 改變,便將其視為常數,若決定了電感電流漣波∆𝑖𝐿,那麼(2.26)式便為一由輸出 電壓𝑉𝑜𝑢𝑡決定的二次函數,因此根據電感電流漣波∆𝑖𝐿的不同,可以得到電感與輸 出電壓關係圖2.5,此圖所設定的條件為切換頻率𝑓𝑠𝑤為 100kHz,輸入電壓𝑉𝑖𝑛為 95V,與後續實驗相同,由圖中可以看出,電感最小值的最差情況是在工作週期
為50%的時候,且隨著電感電流漣波的上升而下降,越小的電感電流漣波意味著
系統越容易進入連續導通模式,但同時也代表著越大的電感值,即越大的體積和 越低的功率密度。
圖 2.5 輸出電壓與電感最小值關係圖
電容的部分如(2.24)式所示,同樣地由於切換頻率𝑓𝑠𝑤是固定的,且電感電流 漣波∆𝑖𝐿如前段敘述所說明,故一樣將(2.7)式帶入(2.24)式後可得到
𝐶𝑚𝑖𝑛 = ∆𝑖𝐿
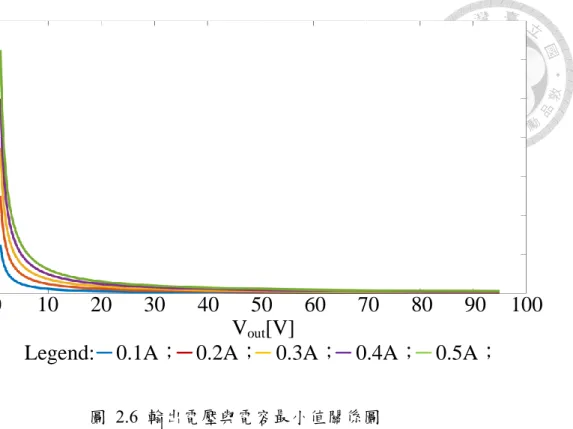
8 × 𝑓𝑠𝑤× 𝐶𝑉𝑅 × 𝑉𝑜𝑢𝑡 (2.27) 由上式可以看出,若是設定好切換頻率𝑓𝑠𝑤及電容電壓漣波比𝐶𝑉𝑅,根據不同的電 感電流漣波∆𝑖𝐿,(2.27)式便為一輸出電壓𝑉𝑜𝑢𝑡與電容最小值𝐶𝑚𝑖𝑛的函數,利用數 值繪製後可以得到圖2.6,模擬情況與圖 2.5 一樣之切換頻率𝑓𝑠𝑤及輸入電壓𝑉𝑖𝑛, 由圖中可看出與電感最小值的趨勢相反,隨著電感電流漣波的上升,電容的最小 值越大,且主要的考慮範圍皆是輸出電壓𝑉𝑜𝑢𝑡較小的時候,電容值需求會有明顯 的上升。
0 10 20 30 40 50 60 70 80 90 100 0
0.5 1.5 1 2 2.5
V
out[V]
L
min[mH ]
Legend: 0.1A; 0.2A; 0.3A; 0.4A; 0.5A;
圖 2.6 輸出電壓與電容最小值關係圖
由上述(2.26)與(2.27)兩式和圖 2.5 及 2.6 所表示,若轉換器需要供給變頻器 定量的能量,便需要電感以及電容兩者儲能元件,從能量觀點可看出電感值與電 容值的選擇是呈現反比,若是需具有較低的電感電流漣波,電感值的需求會較大 而電容值的需求會較小,然而圖2.5 中當輸出電壓為 50%最糟的情況下時,電感 最小值的需求是從約0.5mH 往上提升,而圖 2.6 中當輸出電壓為 5V 時,電容最
小值的需求是從約 3uF 往上提升,考量一般馬達運轉時,變頻器電壓很少低於
5V,因此從數量級來看,要有效提升功率密度,會選擇較大的電容值且較低的電 感值,如若系統可允許較大的電感電流漣波,那麼便可繼續利用較大的電感下降 幅度換取較小的電容上升幅度。
0 10 20 30 40 50 60 70 80 90 100 0
6
V
out[V]
C
min[µ F ]
2 4 8 10 12 14
Legend: 0.1A; 0.2A; 0.3A; 0.4A; 0.5A;
本節利用了前一小節所推導出的方程式,加以利用在PAM 幅值調變控制上,
透過方程式的分析與馬達工作點的決定,討論出轉換器電感值與電容值的取捨,
而本論文將在第五章實驗部分驗證本章所提出的方程式以及電感電容設計結果。
Equation Chapter (Next) Section 1
第3章 PAM 電路及無感測器驅動
圖 3.1 為本論文提出之 PAM 硬體架構,前端為一同步降壓型轉換器,透過
馬達速度控制上下兩臂開關之導通時間,經過LC 濾波後的輸出負責提供後端變
頻器的電壓,而變頻器根據不同的開關導通模式,提供馬達三相電壓以轉動,故
本章節分為兩部分,前一部分將說明基本的PAM 電路驅動架構以及變頻器的動
態響應,後一部分將介紹傳統的30°延遲無感測器驅動法與本論文所提出的90°延 遲無感測器驅動法,並分析其優劣。
圖 3.1 PAM 整體硬體架構
3.1 PAM 架構介紹
PAM 驅動方法與傳統直流無刷 BLDC 驅動方法類似,都是以六步方波(6-
step commutation)為基礎,分別如圖 3.2 與圖 3.3 所示,差異在於 PWM 為固定變 頻器電壓,即無前端的直流轉換器,透過控制六臂開關工作週期改變馬達的三相
Phase A Phase B Phase C S1
S2 S3
S4
S5
S6
電壓;而PAM 為利用控制前端直流轉換器的上下臂開關,改變變頻器之電壓,
而變頻器六臂之開關則是依位置訊號控制,且皆為100%工作週期。
圖 3.2 PWM 馬達六步控制訊號
圖 3.3 PAM 馬達六步控制訊號
圖 3.4 為本論文 PAM 的控制架構圖,與 PWM 控制不同的是,需透過電源
供應器供給降壓型轉換器直流電源,以馬達的速度訊號控制轉換器開關之工作週 期,而無感測器方法則為利用馬達的反電動勢與低通濾波器進行過零點探測(zero cross-point detection-ZCD),之後藉由補償器補償濾波器所造成的相位以及振幅落 後,用來控制變頻器六臂開關,詳細的無感測器驅動法會於3.3 及 3.4 節提出。
由於PAM 前端的轉換器電路,雖然增加了元件數量,但多了一電感元件儲存能
0 60 120 180 240 300 360 S1
0 60 120 180 240 300 S2
0 60 120 180 240 300 S3
0 60 120 180 240 300 S4
0 60 120 180 240 300 S5
0 60 120 180 240 300 S6
360
360
360
360
360
0 60 120 180 240 300 360 S1
0 60 120 180 240 300 S2
0 60 120 180 240 300 S3
0 60 120 180 240 300 S4
0 60 120 180 240 300 S5
0 60 120 180 240 300 S6
360
360
360
360
360
量,期望能藉此降低電容體積,以提升整體功率密度,故本節簡介了PAM 的基 本電路及控制架構,而後續的各項馬達測試也皆是以此架構進行控制。
圖 3.4 PAM 控制架構圖
3.2 變頻器開關之動態響應
本節將討論變頻器穩態以及換相時暫態電壓電流之變化,圖 3.5 為馬達三相 示意圖,假設馬達阻抗與電壓電流三相平衡,依照馬達電壓方程式,可以得到三 相電壓𝑉𝑎𝑛、𝑉𝑏𝑛與𝑉𝑐𝑛,如(3.1)、(3.2)與(3.3)三式
v an
v bn n v cn i a
i b i c
+
+ +
- - -
圖 3.5 馬達三相示意圖
𝑉𝑎𝑛 = 𝑒𝑎+𝑖𝑎𝑅 + 𝐿𝑑𝑖𝑎
𝑑𝑡 + 𝑀𝑑𝑖𝑏
𝑑𝑡 + 𝑀𝑑𝑖𝑐
𝑑𝑡 (3.1)
𝑉𝑏𝑛 = 𝑒𝑏+𝑖𝑏𝑅 + 𝑀𝑑𝑖𝑎
𝑑𝑡 + 𝐿𝑑𝑖𝑏
𝑑𝑡 + 𝑀𝑑𝑖𝑐
𝑑𝑡 (3.2)
𝑉𝑐𝑛 = 𝑒𝑐+𝑖𝑐𝑅 + 𝑀𝑑𝑖𝑎
𝑑𝑡 + 𝑀𝑑𝑖𝑏
𝑑𝑡 + 𝐿𝑑𝑖𝑐
𝑑𝑡 (3.3)
其中𝑒𝑎為a 相反電動勢,𝑖𝑎為a 相電流,b、c 相亦相同,由於假設馬達三相平衡,
所以三相的電阻𝑅、電感𝐿及互感𝑀皆相等,(3.1)、(3.2)與(3.3)三式可以用矩陣表 示為(3.4)
[ 𝑉𝑎𝑛 𝑉𝑏𝑛 𝑉𝑐𝑛
] = 𝑅 [ 𝑖𝑎 𝑖𝑏 𝑖𝑐
] + 𝑑 𝑑𝑡[
𝐿 𝑀 𝑀 𝑀 𝐿 𝑀 𝑀 𝑀 𝐿
] [ 𝑖𝑎 𝑖𝑏 𝑖𝑐
] + [ 𝑒𝑎 𝑒𝑏
𝑒𝑐] (3.4)
因三相電流平衡,故得到(3.5)式
𝑖𝑎+ 𝑖𝑏+ 𝑖𝑐 = 0 (3.5)
將上式移項且通乘互感𝑀,可得到(3.6)式
𝑀𝑖𝑏+ 𝑀𝑖𝑐 = −𝑀𝑖𝑎 (3.6)
𝑀𝑖𝑎+ 𝑀𝑖𝑐 = −𝑀𝑖𝑏 (3.7)
𝑀𝑖𝑏+ 𝑀𝑖𝑎 = −𝑀𝑖𝑐 (3.8)
矩陣(3.4)便可化簡為
[ 𝑉𝑎𝑛 𝑉𝑏𝑛 𝑉𝑐𝑛
] = 𝑅 [ 𝑖𝑎 𝑖𝑏 𝑖𝑐
] + 𝑑 𝑑𝑡[
𝐿 − 𝑀 0 0
0 𝐿 − 𝑀 0
0 0 𝐿 − 𝑀
] [ 𝑖𝑎 𝑖𝑏 𝑖𝑐
] + [ 𝑒𝑎 𝑒𝑏
𝑒𝑐] (3.9)
根據圖3.3 可得知,六步方波 BLDC 驅動是使馬達同時兩相導通,導通時的兩 相電流相等而浮接的第三相穩態為零電流,故當三相電流為常數時,可將(3.9) 式微分項去掉,進一步化簡為
[ 𝑉𝑎𝑛 𝑉𝑏𝑛 𝑉𝑐𝑛
] ≅ 𝑅 [ 𝑖𝑎 𝑖𝑏 𝑖𝑐
] + [ 𝑒𝑎 𝑒𝑏
𝑒𝑐] (3.10)
接著假設馬達處於 a、b 兩相導通,電流為𝑖,即圖 3.1 中的開關 S1 及 S6 導 通,此時變頻器之相對地電壓與電流如下
𝑉𝑎𝑁= 𝑉𝑑𝑐,𝑖𝑛𝑣 (3.11) 𝑖𝑎 = 𝑖 (3.12)
𝑉𝑏𝑁 = 0 (3.13) 𝑖𝑏 = −𝑖 (3.14)
𝑉𝑐𝑁 = 𝑒𝑐 + 𝑉n (3.15) 𝑖𝑐 = 0 (3.16)
𝑉𝑑𝑐,𝑖𝑛𝑣為變頻器電源,即前端轉換器之輸出電壓,下標n 表示馬達之中性點,下
標N 則為變頻器之接地,而三相電壓可藉由上述式子得到
𝑉𝑎𝑛 = 𝑉𝑑𝑐,𝑖𝑛𝑣− 𝑉𝑛 = 𝑒𝑎+ 𝑖𝑅 (3.17)
𝑉𝑏𝑛 = −𝑉𝑛 = 𝑒𝑏− 𝑖𝑅 (3.18)
𝑉𝑐𝑛 = 𝑒𝑐 (3.19)
將(3.17)與(3.18)相加,移項後代入反電動勢三相平衡,可得馬達中性點方程式
𝑉𝑛 = 1
2𝑉𝑑𝑐,𝑖𝑛𝑣+1
2𝑒𝑐 (3.20)
最後將(3.20)式代入(3.15)式,得到浮接相𝑉𝑐𝑁為
𝑉𝑐𝑁 =1
2𝑉𝑑𝑐,𝑖𝑛𝑣 +3
2𝑒𝑐 (3.21)
以上為六步方波驅動時的穩態電壓與電流,原本適用於 PWM 驅動,但亦適
用於本論文PAM 驅動,而其他相導通時的浮接相電壓推導亦同理。接下來為換
相部分,假設變頻器開關為S1 與 S6 導通變換為 S1 與 S2 導通,如圖 3.6 所示,
由於馬達為電感性負載,故當S6 關閉時,b 相電流需續流,此時 S3 的本體二極 體(body diode)會導通令 b 相電流可續流,如圖中藍色線,同時因 S2 開啟,所以 c 相電流會流經 S2 回到變頻器,如圖中綠色線,隨著 ic漸漸變大,S2 慢慢開啟,
ib也漸漸變小,如圖3.7 所示,在這過程,由於 S3 的本體二極體處於導通狀態,
故變頻器的b 對地電壓會產生一段電壓突波,其幅值為變頻器之電源電壓。對於
PAM 無感測器驅動,此幅值將會影響 ZCD 判斷,會在下一章節提出補償方法。
圖 3.6 變頻器換相示意圖 圖 3.7 變頻器換相波形圖
3.3 PAM 無感測器驅動法
由於永磁馬達本身內部具有磁鐵,因此當其旋轉時,根據不同的繞線方式會 有不同的感應電動勢產生,且與轉速成正比,這些反電動勢不論是梯形波或是弦 波皆會隨著馬達電子角度的不同會對應到不同的電壓值,就像是馬達內建的編碼 器一樣,然而利用反電動勢估測馬達角度也並非沒有缺點,當馬達處於低轉速狀 態下,由於反電動勢的低幅值,若此時的電壓量測誤差稍微大些,便有可能因掌 握不到正確的反電動勢導致馬達失控,此外當馬達進行步階負載測試時,也需掌 握好控制器頻寬,避免因頻寬太低造成馬達轉速過低而失控,但過高的頻寬亦會 造成過大的變頻器電壓變化,使馬達產生震動而失控,這是需要做取捨的地方。
一般而言,馬達的中性點不好取得,因此若要量測反電動勢,可利用變頻器 的相對地電壓,即前一小節所推導的𝑉𝑎𝑁、𝑉𝑏𝑁與𝑉𝑐𝑁,如圖3.8 與 3.9 所示,由於
S1
S2 S3
S4
S5
S6
i
ai
bi
cib ic VbN
![圖 1.4 不同結構與材料之定子損失圖[10] 圖 1.5 有槽式馬達轉子損失[11] 圖 1.6 無槽式馬達轉子損失[11] 然而磁性材料的選擇將影響馬達的成本,而馬達的結構則與其用途相關,一 般而言,高速馬達因使用力矩較小,故體積也往小型化發展,而其變頻器切換頻 率與電氣頻率皆較高,因此多使用輸出轉矩較小與較無齒槽轉矩(cogging torque) 的無槽式馬達降低定子與轉子損失;而較泛用的中低速馬達力矩需求較高體積也 較大,且因速度較低所以電氣頻率不高,故多使用成本](https://thumb-ap.123doks.com/thumbv2/9libinfo/9596903.628110/33.892.177.784.119.419/不同結構與材料之定子損失有槽式馬達轉子損失達轉子低定子與轉子.webp)
![圖 1.10 C 組實驗路徑圖[18] 圖 1.11 D 組實驗路徑圖[18]](https://thumb-ap.123doks.com/thumbv2/9libinfo/9596903.628110/37.892.156.788.118.283/圖11C組實驗路徑圖18圖111D組實驗路徑圖18.webp)
![圖 1.25 小電容之馬達控制方塊圖[32]](https://thumb-ap.123doks.com/thumbv2/9libinfo/9596903.628110/43.892.172.787.109.859/圖125小電容之馬達控制方塊圖32.webp)
![圖 1.28 PAM 電路架構[34]](https://thumb-ap.123doks.com/thumbv2/9libinfo/9596903.628110/44.892.159.728.669.907/圖128PAM電路架構34.webp)
![圖 1.35 雙 DSP 之 PAM 電容電流漣波改善架構[38]](https://thumb-ap.123doks.com/thumbv2/9libinfo/9596903.628110/48.892.172.769.118.464/圖135雙DSP之PAM電容電流漣波改善架構38.webp)
![圖 1.41 以降壓-升壓型轉換器為前級之 PAM 電路[47]](https://thumb-ap.123doks.com/thumbv2/9libinfo/9596903.628110/51.892.225.790.113.264/圖141以降壓升壓型轉換器為前級之PAM電路47.webp)
![表 1-3 Celeroton CC-100-1000 相關參數 參數 量值 直流鏈電感 157.08µH 直流鏈電容 22.56µF 開關切換頻率 80kHz 額定輸入電壓 24-100V 額定功率 1000W 圖 1.45 參考產品變頻器訊號 圖 1.46 參考產品驅動之馬達電壓電 流訊號 1.3 論文目的 本論文的目的在探討將文獻[53]的數學模型應用於 PAM 系統,並透過此模 型縮小電路之電容容值與體積,此外針對 PAM 方波驅動系統,亦提出新的無位](https://thumb-ap.123doks.com/thumbv2/9libinfo/9596903.628110/53.892.143.785.110.554/Celeroton相關參數參數量值直流鏈電H直流論文目的本論文系統並系統亦.webp)