國立臺灣大學工學院機械工程學研究所 碩士論文
Department of Mechanical Engineering College of Engineering
National Taiwan University Master Thesis
結合非線性力的旋轉式雙自由度壓電能量採集器分析 Analysis of a Rotational Nonlinear Two-degree-of-
freedom Piezoelectric Energy Harvester
李翔宇 Xiangyu Li
指導教授:蘇偉儁 博士 Advisor: Wei-Jiun Su, Ph.D.
中華民國 110 年 1 月
Jan, 2021
誌謝
首先最想要感謝的是蘇偉儁教授長期對我的指導和包容,在研究工作陷入困 難時,蘇教授總會給與適當的指點讓我茅塞頓開,此外還給與我一個寬鬆的環境 以自主安排研究進展和享受研究中的樂趣,因為轉專業導致的知識匱乏教授也予 以理解和幫助。其次感謝我的父母,予以我經濟上的幫助讓我專心完成學業;當 我遇到委屈時也是父母耐心聽我的埋怨,幫助我調整自己。還要感謝實驗室的學 長:文波、奕康、奕傑、紹增、文宇、佳翰、書群,他們總願意無私地給與我幫 助,特別要感謝奕傑學長在幾何非線性模型構建上的研究和傳授,給我以很大的 幫助;感謝實驗室的同儕:振廷、宗祥、麒翔、郁婷以及實驗室的學弟妹:子洋、
雨融等,一路上非常感謝能夠遇到你們。不論是什麼事情至少我自己是問心無愧 的,雖然還是有很多遺憾。最後感謝台灣大學機械工程學係,願意錄取我給我以 讀研的機會去提升自己和思考未來,希望台大和機械工程係能夠越來越好。
摘要
本論文提出一種用於旋轉環境的雙自由度壓電能量收集器。收集器設計為折 返樑結構以獲得低頻下頻率相近的兩個共振頻峰值的效果。模型上本文放寬傳統 古典樑假設中的小位移振動的限制,以幾何非線性的模型來探討旋轉環境大位移 振動下發電電壓之頻響與頻寬的數值解。研究中首先考慮改變折返樑結構參數對 發電效率的影響。特別研究了當上升模態,即共振頻率隨轉速提升而上升的模態,
其共振频率先於和後於模態轉向(mode veering)發生的兩種情況下的電壓掃頻 結果,並取得接近現實情況的模擬結果。為使系統頻寬拓寬,實驗還使用兩種非 線性外力作用:一種藉由機械檔板的碰撞產生非線性脈衝力來改變系統剛性;另 一種藉由磁力以非接觸的方式來改變系統的剛性。最後,對比實驗結果與模型數 值擬合結果,探討其現象。研究發現,引入非線性力在大部分情況下對雙自由度 系統的共振頻寬拓展效果顯著,在一些條件下情況則不夠理想,並且普遍存在發 電效率下降的情況。
關鍵字:幾何非線性、旋轉運動、壓電能量收集、雙自由度、擋板非線性、磁力
ABSTRACT
This thesis proposes a two-degree-of-freedom piezoelectric energy harvester for rotational excitations. The harvester is based on a cut-out beam structure to obtain two close resonant frequencies. In this model, we remote the limitation of small displacement vibration in the traditional classical beam theory, and use a geometric nonlinear model to obtain the numerical results of the frequency response and bandwidth of the generating voltage under large-displacement vibration in a rotating environment. First, we discuss the effect of different structure parameters in energy harvesting efficiency. Besides, we investigate the frequency sweeping results when the resonant frequency of the up mode, which is the case when the resonant frequency increases with the rotation speed, occurs before and after mode veering. The simulation results match the experiment results well. This study uses two types of nonlinear external force to broaden the bandwidth: the mechanical stopper which generates a nonlinear impulse force to change the rigidity of the system by colliding; the magnetic force which changes the rigidity of the system in a non-contact way. Finally, we discuss the phenomenon by compare the experimental results with the simulations. In conclusion, the nonlinear force is effective in bandwidth expanding of our two-degree- of-freedom piezoelectric energy harvester in most situations, while not so well in some other conditions. The decreasing of power generation efficiency is universal.
Keywords: geometric nonlinearity, rotational motion, piezoelectric energy harvester, two-degree-of-freedom, Impact-based nonlinearity, magnetic nonlinearity
目錄
誌謝... i
摘要... ii
ABSTRACT ... iii
目錄... iv
圖目錄... vii
表目錄... x
Chapter 1 緒論... 1
1.1 前言 ... 1
1.2 文獻回顧 ... 2
1.3 研究動機與方法 ... 8
1.4 論文架構 ... 9
Chapter 2 壓電理論 ... 10
2.1 壓電效應 ... 10
2.2 壓電本構方程式 ... 12
Chapter 3 旋轉壓電折返樑模型 ... 14
3.1 旋轉壓電折返樑力學模型 ... 15
3.1.1 強迫振動方程 ... 15
3.1.2 模態分析 ... 24
3.1.3 正規化處理 ... 27
3.2 旋轉壓電折返樑電學模型 ... 32
3.3 數值計算和模態處理 ... 34
Chapter 4 非線性模型 ... 37
4.1.2 脈衝模型 ... 39
4.2 磁力非線性模型 ... 44
4.2.1 磁力模型 ... 44
4.2.2 系統模型 ... 46
Chapter 5 實驗設計... 49
5.1 原型設計 ... 49
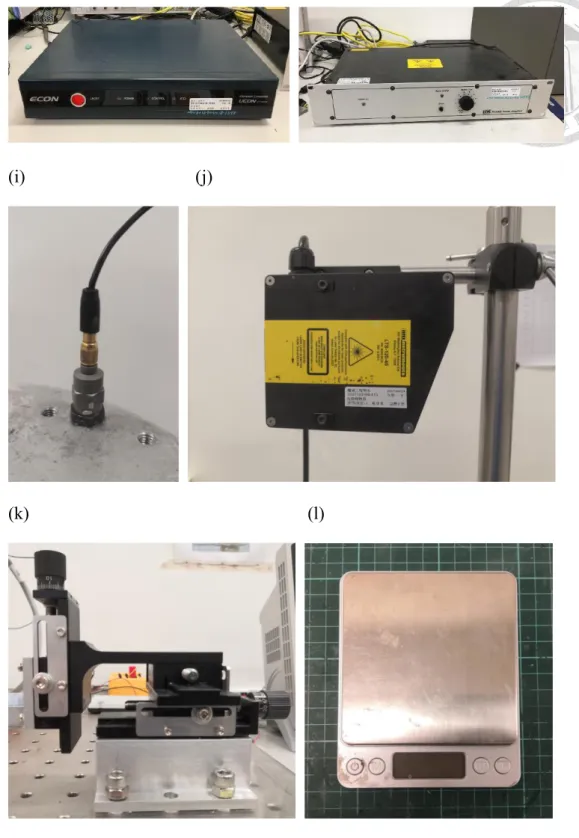
5.2 實驗儀器 ... 52
5.3 實驗流程 ... 55
5.3.1 基底激振實驗 ... 55
5.3.2 旋轉環境實驗 ... 57
Chapter 6 驗證與討論 ... 59
6.1 壓電材料簡化假設 ... 59
6.2 旋轉折返樑模型驗證 ... 62
6.2.1 旋轉折返基樑驗證 ... 62
6.2.2 結構參數調節影響與驗證 ... 65
6.3 擋板非線性模型驗證 ... 74
6.3.1 擋板驗證 ... 74
6.3.2 主樑末端擋板模型驗證 ... 75
6.3.3 副樑末端擋板模型驗證 ... 79
6.4 磁力非線性模型驗證 ... 82
6.4.1 磁鐵模型驗證 ... 82
6.4.2 主樑末端磁力模型驗證 ... 83
6.4.3 副樑末端磁力模型驗證 ... 88
Chapter 7 結論與未來展望 ... 93
7.1 結論 ... 93
7.2 未來展望 ... 94 參考文獻... 95
圖目錄
圖 1.1 幾何結構優化式採集器... 3
圖1.2 多模態採集器... 3
圖1.3 非線性採集器... 4
圖1.4 蒲公英狀多方向壓電振動能量採集器[24]; ... 5
圖1.5 旋轉式復合梁... 5
圖1.6 旋轉式採集器... 7
圖1.7 旋轉式雙自由度折返樑系統能量採集器示意圖... 8
圖 2.1 極化處理... 10
圖 2.2 壓電效應... 11
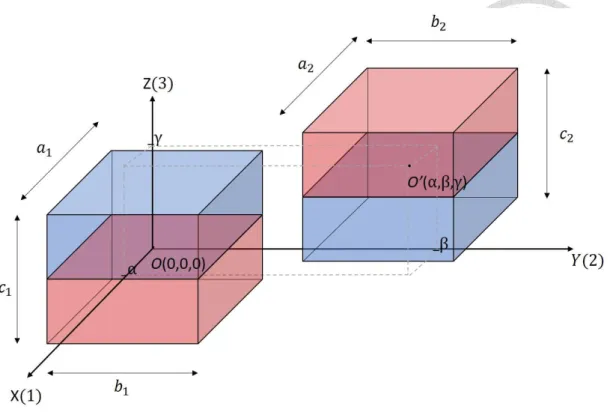
圖 3.1 四段折返樑系統坐標系圖... 15
圖 3.2 樑單位體連續性受力示意... 17
圖 3.3 壓電折返樑耦合部分橫截面示意圖... 19
圖 3.4 單位長度樑角度與位移偏移關係示意... 21
圖 3.5 壓電材料等效電路... 32
圖 3.6 折返樑轉速與自然頻率關係變化... 35
圖 3.7 模態轉向區域折返樑轉速與自然頻率關係變化... 35
圖 3.8 模態轉向區域折返樑轉振動形狀變化... 35
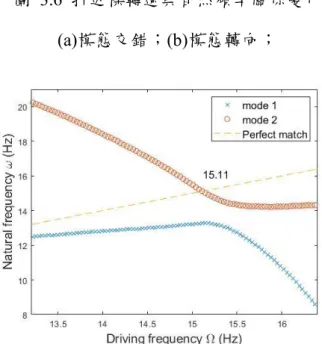
圖 3.9 上升模態先於和後於模態轉向到達旋轉共振頻... 36
圖 4.1 旋轉折返樑脈衝非線性能量採集器... 37
圖 4.2 副樑末端振動偏移示意... 41
圖 4.3 旋轉折返樑磁力非線性能量收集器... 44
圖 4.4 方形磁鐵坐標示意圖... 45
圖 5.1 實驗原型設計... 50
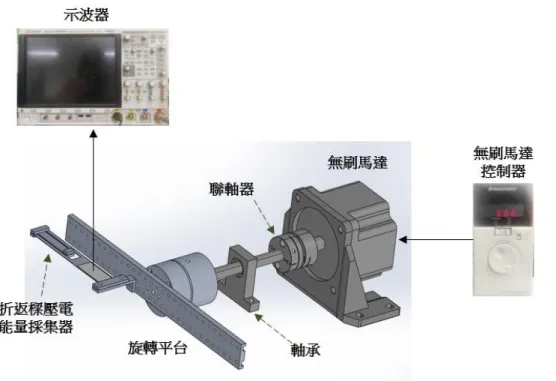
圖 5.2 旋轉測試平台... 51
圖 5.3 實驗儀器... 54
圖 5.4 基底激振實驗配置圖... 56
圖 5.5 旋轉環境實驗配置圖... 58
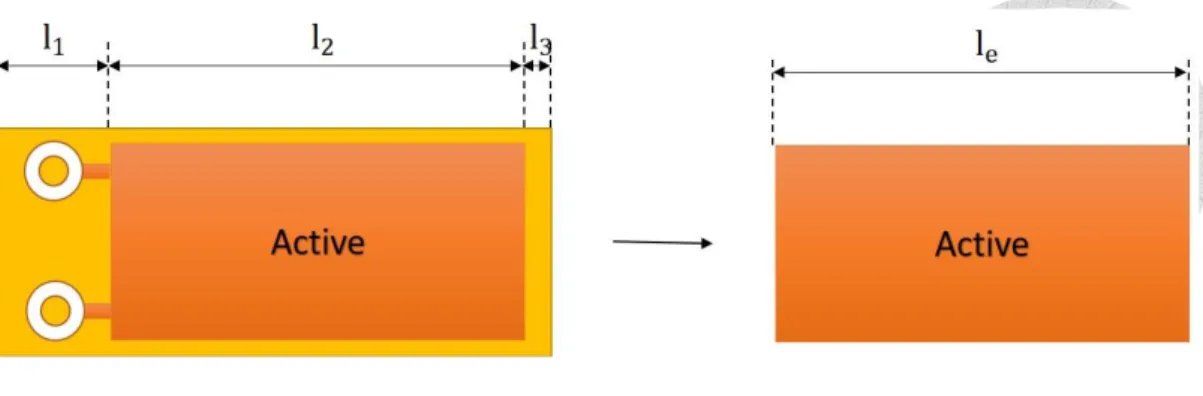
圖 6.1 壓電薄膜結構組成示意圖[51] ... 59
圖 6.2 壓電薄膜簡化示意圖... 60
圖 6.3 折返樑幾何結構... 62
圖 6.4 旋轉折返樑基樑 A 共振頻模擬圖與實驗圖 ... 64
圖 6.5 旋轉折返樑基樑 A 模擬實驗比較圖 ... 65
圖 6.6 旋轉折返樑改變主樑樑長L ... 67
圖 6.7 旋轉折返樑改變主樑長度L模擬實驗比較圖 ... 67
圖 6.8 旋轉折返樑改變M1 =3.5 g共振頻模擬圖與實驗圖 ... 69
圖 6.9 旋轉折返樑改變主樑末端質量塊M1模擬實驗比較圖... 69
圖 6.10 旋轉折返樑改變主樑末端質量塊模擬實驗比較圖... 70
圖 6.11 旋轉折返樑改變副樑末端質量塊M2 ... 71
圖 6.12 旋轉折返樑改變副樑末端質量塊模擬實驗比較圖... 72
圖 6.13 擋板 A(主樑擋板)掃頻共振頻實驗模擬對比 ... 75
圖 6.14 擋板 B(副樑擋板)掃頻共振頻實驗模擬對比 ... 75
圖 6.15 旋轉折返樑基樑 B 共振頻模擬圖與實驗圖 ... 77
圖 6.16 旋轉折返樑基樑 B 模擬實驗比較圖 ... 77
圖 6.17 旋轉折返樑主樑末端擋板系統在不同碰撞間距下實驗圖... 78
圖 6.18 旋轉折返樑主樑末端擋板系統在不同碰撞間距下模擬圖... 78
圖 6.19 旋轉折返樑主樑末端擋板系統正反掃實驗模擬比較圖... 79
圖 6.20 旋轉折返樑副樑末端擋板系統在不同碰撞間距下實驗圖... 80
圖 6.21 旋轉折返樑副樑末端擋板系統在不同碰撞間距下模擬圖... 80
圖 6.23 兩顆磁鐵之磁力模型驗證... 82
圖 6.24 4*4*4 mm與 5*5*5 mm 兩顆磁鐵在 X 方向偏移 5 mm 情況之磁力模型 驗證 ... 83
圖 6.25 旋轉折返樑主樑末端磁力系統在不同磁鐵間距下實驗圖... 84
圖 6.26 旋轉折返樑主樑末端磁力系統在不同磁鐵間距下模擬圖... 85
圖 6.27 旋轉折返樑主樑末端磁力系統正反掃實驗模擬比較圖... 85
圖 6.28 旋轉折返樑主樑末端磁力系統位能圖... 88
圖 6.29 旋轉折返樑副樑末端磁力系統在不同磁鐵間距下實驗圖... 89
圖 6.30 旋轉折返樑副樑末端磁力系統在不同磁鐵間距下模擬圖... 90
圖 6.31 旋轉折返樑副樑末端磁力系統正反掃實驗模擬比較圖... 90
圖 6.32 旋轉折返樑副樑末端磁力系統位能圖... 92
表目錄
表 5.1 實驗儀器... 52
表 6.1 DT1-028K/L 官方參數 ... 60
表 6.2 DT1-028K/L 簡化後參數 ... 61
表 6.3 旋轉折返樑基基底樑 A 參數 ... 63
表 6.4 旋轉折返樑基基底樑 A 數值模擬參數修正 ... 64
表 6.5 旋轉折返樑對比不同樑長的參數修正... 66
表 6.6 不同樑長L對發電面積比較 ... 68
表 6.7 旋轉折返樑對比不同主樑末端質量塊M1的參數修正... 68
表 6.8 不同主樑末端質量M1對發電面積比較... 70
表 6.9 旋轉折返樑對比不同副樑末端質量塊M2的參數修正 ... 70
表 6.10 不同副樑末端質量M2對發電面積比較 ... 72
表 6.11 擋板 A(主樑擋板)與擋板 B(副樑擋板)參數 ... 74
表 6.12 旋轉折返樑基基底樑 B 參數 ... 76
表 6.13 不同主樑末端擋板間距對發電面積的比較... 79
表 6.14 不同副樑末端擋板間距對發電面積的比較... 81
表 6.15 旋轉折返樑主樑末端磁力系統參數修正... 83
表 6.16 不同主樑末端磁鐵間距對發電面積的比較... 86
表 6.17 旋轉折返樑副樑末端磁力系統參數修正... 89
表 6.18 不同副樑末端磁鐵間距對發電面積的比較... 90
Chapter 1 緒論
1.1
前言隨著社會的發展,人類對環境保護的意識不斷加強,同時對穩定的不間斷電 力的需求促使人類去開發清潔、環保、可靠、廉價的新能源。人類已經使用了以 風能、水、潮汐能、地熱和太陽能等形式的能量收集技術來解決宏觀上的能源需 求;在微觀能量收集領域,人們的目光則集中在機械能,生物能和熱能等環境中 比較常見的能量上。其中振動能量是環境中最常見也最容易浪費掉的一種,將振 動能轉化為電能為微觀能量收集提供了一個解決思路。根據發電原理不同,振動 能量收集可以分為靜電式、電磁式與壓電式。其中,電磁式能量收集的輸出電壓 較低而靜電式則需要施加輸入電壓和電流[1];相比較而言壓電式能量收集有著 能量轉換效率高、結構簡單等優點而受到廣泛地研究和關注。同時,無線感測器 技術和超低功率的電子設備技術(MEMS)的發展對電池的壽命,穩定性和便攜 性都提出了更高的要求,壓電能量收集的技術特點則為其提供了強有力的支援。
目前,壓電技術應用前景廣闊,如微型發電機、運動鞋、心臟起搏器、健康監測 設備[2]、工業設備健康監測、風能和海洋能收集等都有壓電能量收集裝置的身影。
近些年來,旋轉環境下的能量收集愈發得到重視,與傳統的垂直能量收集相比,
旋轉系統體現出較為明顯的幾何非線性,受到離心力和剪切力影響較大,一些精 細的理論會將科氏力(Coriolis effect),扭轉(torsion),幾何截面形狀,離心硬 化效應(Centrifugal stiffening effect)組合納入考慮[3]。目前旋轉壓電能量收集系 統在風力渦輪機,工業風扇和蒸汽輪機都有較多應用。
1.2 文獻回顧
壓電材料根據電壓與應變方向之間的方向關係分為31 式和 33 式,Lee 等人 [4]比較了兩種模式的輸出功率,認為 31 模式下的性能優於 33 模式下的性能;
Kim 等人[5]則認為,對於 MEMS,當叉指電極(IDE)的寬度介於 8-20μm 之間 時,33 模式的 MEMS 有著更高的電壓和功率。
歐拉-伯努利樑理論是各種研究中最基本的理論,由於它忽略了橫向剪切形 變和旋轉慣性效應,因此低估了旋轉系統中樑的擾度(deflections),高估了系統 的自然頻率(natural frequency)[3]。經典的樑理論放寬了歐拉-伯努利樑的第二 個假設,它允許樑在變形時橫截面不保持平面。在此基礎上,加入了橫向剪切形 變的鐵木辛柯模型對樑寬厚比較小的厚樑的運動預測更為準確。大多數旋轉樑的 理論在處理橫截面的問題時均加入了特定的假設補充以簡化計算,但也因此不適 用於複合結構的樑。Chandiramani 和 Librescu [6]構建了一種精樑理論用於橫截 面形狀不均勻或複合結構的樑,討論了橫向剪切、翹曲(warpings)、離心力、科 氏力等非典型力的影響。除了各式各樣的有關理論模型的優化理論,拓寬採集頻 寬的工作也是壓電能量收集研究的重點。頻寬對最終的發電功率有著重要的影響,
為了提升壓電收集的頻寬,前人在壓電能量收集系統上進行很多優化。常見的優 化方法包括幾何結構的優化、多模態法、引入非線性項、多方向收集、外接電路 等。
懸臂樑是壓電能量收集中最常見的幾何結構,有著振動幅度大共振頻低等優 點,Erturk 和 Inman [7, 8]對傳統壓電懸臂樑的能量收集有著全面完整的理論模型 推導和實驗結果驗證;Roundy [9]指出由於結構優勢,錐形樑比矩形樑可以提供 更多的能量輸出;Sharpes 等人[10]使用之字形結構以通過降低懸臂結構的剛度 來降低共振頻率;Kim 等人分別在[11]和[12]中分析和實驗了在不同壓力下工作
(a) (b) (c)
圖 1.1 幾何結構優化式採集器
(a)之字形樑[10];(b) 壓電圓膜[12];(c) 鈸式樑[13];
多模態法主要通過增加系統的共振模態的方法,以增加頻寬。Tang 和 Zuo [14]提出並分析了一種將質量塊與換能器和彈簧串聯連接在一起的雙質量振動 能量收集器使其具有較寬的頻寬並證明該收集器比傳統的單質量振動能量收集 器能夠收集更多的能量;Kim 等人[15]和 Hu 等人[16]分別提出了基於兩階段折 疊和三階段折疊懸臂的多質量多彈簧壓電振動能量收集器,指出使用非對稱間隙 結構可以進一步提高能量轉換效率;Wu 等人[17]分析了雙自由度折返樑結構主 副樑在不同尺寸比例下振動的變化規律;Toyabur 等人[18]提出了一種與四個壓 電元件並聯彈簧橋結構,可以在10-20 Hz 的範圍內獲得四個峰值。
(a) (b)
(c)
圖1.2 多模態採集器
(a)兩段式折疊懸臂樑[15];(b) 三段式折疊懸臂樑[16];(c)彈簧橋[18];
非線性可以從系統固有的特徵引入,Triplett 和 Quinn [19]研究了壓電的本構 關係導致的非線性。相比系統固有特徵,外部引入的非線性效果往往更加顯著,
常見的如磁力,擋板等。Masana 和 Daqaq [20]利用磁力和擋板機械力為振動系統 引入非線性力;Liu 等人[21]通過加入擋板來達到降低共振頻的目的;Fan 等人 [22]通過對壓電懸臂樑同時引入一對擋板和對稱的磁力來限制樑的最大偏轉,使 之工作頻寬增加了54%,輸出功率增加了 253%。
圖1.3 非線性採集器 對稱磁力擋板壓電系統[20];
在實際生活中振動可能來自各個方向,增加不同採集方向具有增強能量收集 功率的現實意義。Su 和 Zu [23]提出了一種三向壓電能量收集器,能夠從三個正 交方向的較寬頻寬中收集振動能量;Chen 等人[24]提出了一種蒲公英狀的多方向 壓電振動能量採集器可以在不同的激勵下收穫相對更多的能量,但從各個方向上 獲得的能量則更少。
圖1.4 蒲公英狀多方向壓電振動能量採集器[24];
相比一般的振動環境,旋轉環境下的振動振幅更大,樑在旋轉中產生了較大 的軸向力和橫向偏轉,因此常常會體現出幾何非線性的現象。因此,有關旋轉條 件下的研究絕大部分會集中在理論模型的優化和擬合上。1988 年,Yigit 等人[25]
推導出旋轉懸臂樑完全耦合的非線性運動方程,並以數值解研究其波形;Gu 和 Livermore [26]以實驗驗證旋轉環境離心力對系統的被動調頻的作用;Hsu [27]構 建了旋轉懸臂樑末端質量塊結構的有限元素模型並以實驗結果驗證其準確性;
Turhan 和 Bulut [28]以雙自由度模型研究旋轉平面的非線性振動,認為系統硬軟 化條件與固有頻率的穩定性之間存在聯繫;Minguet 和 Dugundji [29]進行了大擾 度下複合材料樑旋轉的實驗和分析;Chandra 和 Chopra 研究了旋轉複合箱形樑 [30]和工字樑[31]的振動特性。
(a) (b)
圖1.5 旋轉式復合梁
(a)旋轉複合箱型樑[30];(b)旋轉工字樑[31];
除了理論研究的相關工作,旋轉環境常常會與非線性力法、多模態法等方法 相互結合以期得到更好的結果。磁鐵因其非接觸性和易於假設的特點而最常出現,
Li 等人[32]給出了結合末端磁力的懸臂樑旋轉能量收集器的理論模型和實驗驗 證;Zou [33]研究了一種雙自由度的結合磁力的朝內樑旋轉能量收集器,兩顆磁 鐵附著在朝內梁自由端,在振動過程中往復地相互作用;Guo 等人[34]在懸臂樑
末端和延伸處固定位置分別安裝兩顆磁鐵,研究其電壓輸出和磁鐵間距的最佳距 離;Mei 等人[35]在此基礎上再添加一顆磁鐵,使兩顆磁鐵對稱於樑末端的兩側,
形成三穩態的壓電能量收集系統;Fang 等人[36]對旋轉朝內樑的兩側安置擋板,
考慮離心軟化作用對系統的影響,並在[37]進一步研究該系統的特性和優勢;
Febbo 等人[38]提出了一種新式旋轉平面外式的壓電能量收集器,它以彈簧連接 朝外梁和朝內梁的末端質量塊,通過將該梁附接到旋轉輪轂上可以達到無線監控 系統能量的效果;Ramezanpour 等人[39]提出系統不旋轉,外部激勵的磁鐵旋轉 的陣列式架構;Xie 等人[40]同樣改變了激振的方式,以旋轉的雙磁鐵的磁力激 勵雙穩態的彎曲樑發生振動,獲得6-14 Hz 區間較寬的頻響;Sadeqi 等人[41]以 兩隻彈簧連接樑兩端的質量塊獲得旋轉環境下雙模態的電壓,並且通過改變彈簧 剛性實現對兩個模態共振頻的調節。
(a) (b)
(c) (d)
圖1.6 旋轉式採集器
(a)雙自由度朝內樑磁力旋轉能量收集器[33];(b)三穩態旋轉壓電能量收集器 [35];(c)旋轉朝內樑擋板系統[36];(d)旋轉平面外旋轉能量收集器[38];(e)旋轉
雙穩態彎曲樑能量收集器[40];(f)基于輪胎嵌入的耦合結構能量收集器[41];
在本文中,將以四段式的折返梁幾何結構為基礎,置於旋轉環境中,綜合以 多模態法和引入非線性力的方法達到拓寬頻寬的效果,希望藉此獲得低頻下相互 連接的雙模態寬頻效果。
1.3
研究動機與方法傳統的懸臂樑壓電能量採集器有著發電頻響窄的缺陷,並且發電共振頻位置 較難改變,從而無法得到便於使用的壓電能量。本論文通過折返樑的結構特性,
引入低頻下系統的第二模態,旋轉的特性又將兩個共振頻進一步拉近得到較寬的 頻響。在此基礎上引入非線性力,進一步拓寬頻響。由於通常情況下旋轉環境下 樑系統的振動幅度大,本文放寬經典薄樑理論裡小位移振動的假設,引入幾何非 線性模型去研究該配置下壓電能量收集器和引入非線性的擋板脈衝力、磁力作用 的能量收集器的頻響、頻寬以及最終的功率輸出。
圖1.7 旋轉式雙自由度折返樑系統能量採集器示意圖
1.4
論文架構本文分七個章節:
第一章:緒論部分,介紹該領域的研究背景,回顧相關的文獻與研究,提出研究 動機與方法。
第二章:壓電理論簡介與本構方程式。
第三章:旋轉折返樑幾何非線性模型的推導。
第四章:引入非線性力,對非線性力進行建模,在第三章基礎上得到非線性系統 的旋轉折返樑壓電能量採集器發電效果的數值解。
第五章:實驗設計,介紹實驗使用的器材和實驗的流程。
第六章:驗證與討論,通過實驗獲得的數據可視化地驗證理論模型,並探討理論 無法覆蓋到的實際問題。
第七章:總結研究得到的結果,提出問題和猜想,進行未來展望。
Chapter 2 壓電理論
2.1
壓電效應壓電效應是介電材料中一種機械能與電能互換的現象。根據機械能與電能的 轉換方向不同分為正壓電效應與負壓電效應。該現象最早由居裡兄弟于 1880 年 發現。壓電材料會有壓電效應是因為晶格內原子間的特殊排列方式。為了更好得 觀察壓電效應,往往會對材料進行預先的極化處理。在未經極化處理時,晶格的 電偶極矩方向是無序散亂的(圖 2.1(a))。在外電場作用下,電介質內部沿電場 方向產生感應偶極矩,原本隨機方向的電荷移動為有序的同方向排列(圖 2.1(b)), 該排列方向也稱極化方向。
(a) (b) (c)
圖 2.1 極化處理
(a)極化前;(b)極化過程;(c)極化後;
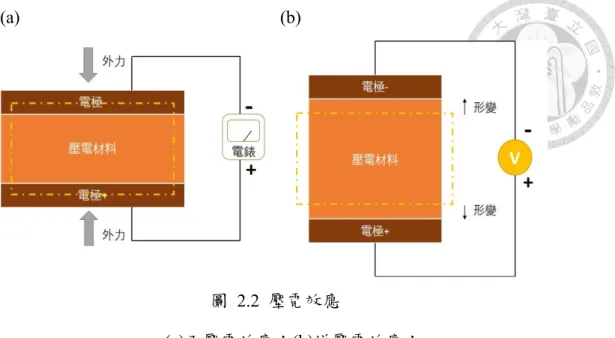
黨對極化後的材料施加物理壓力時,材料內的電偶極矩會因壓縮而變短,此 時壓電材料會為抵抗這種變化而在表面產生等量的正負電荷以保持原狀。這種因 為形變而產生的電極化的現象稱為正壓電效應(圖 2.2(a));當對極化後的材料 表面施加電場時,因為電場作用電偶極矩會被拉長,此時壓電材料為抵抗變化會 在沿電場方向伸長。這種通過電場作用而產生的機械形變的過程稱為逆壓電效應
(圖 2.2(b))。
(a) (b)
圖 2.2 壓電效應
(a)正壓電效應;(b)逆壓電效應;
在壓電材料中這兩種效應一般是同時存在的,在一些運用正壓電效應的場合 如果忽視逆壓電效應的存在將會導致熱力學的不一致性[42]。
2.2
壓電本構方程式壓電材料的線型本構方程式[43]描述的是壓電材料在應力場與電場的作用 下的關係。考慮到本文所用到的方程式形式為d-form,可表示為如下形式:
E T
dt
s
d
=
S T
D E (2.1)
其中,𝐒、𝐃、𝐓、𝐄表示應變、電位移、應力、電場。s、 d 、 代表柔度矩陣、
壓電常數矩陣、介電常數矩陣。上標𝑬、𝑻表示該常數在固定電場和固定應力下量 測所得。上標 t 表示轉置矩陣。
對於壓電材料,s 有 21 個參數, d 與E d 有 18 個參數,t T有6 個參數,將 其展開,並以壓電材料的對稱性消去部分參數得壓電材料的線型本構方程式 d- form 的展開式:
1 11 12 13 31
2 12 22 13 31
3 13 13 33 33
4 55 15
5 55 15
6 66
1 15
2 15 11
3 31 31 33 33
11
0 0 0 0 0
0 0 0 0 0
0 0 0 0 0
0 0 0 0 0 0 0
0 0 0 0 0 0 0
0 0 0 0 0 0 0 0
0 0 0 0 0 0 0
0 0 0 0 0 0 0
0 0 0 0 0
E E E
E E E
E E E
E E
E T
T T
S s s s d
S s s s d
S s s s d
S s d
S s d
S s
D d
D d
D d d d
=
1 2 3 4 5 6 1 2 3
T T T T T T E E E
(2.2)
本文以Euler-Bernoulli 樑理論為基礎,不考慮平面外的力;又因為本文使用的壓 電材料模型認為材料的電極平面與極化方向垂直,則公式(2.2)可進一步簡化為:
1 11 31 1
3 31 33 3
E
T
S s d T
D d E
=
(2.3)
對(2.3)進行變形:
−
這樣就得到了應力與電位移的e-form:
1 11 31 1
3 31 33 3
E S
T c e T
D e E
−
=
(2.5)
其中,
2 31
33 33
11
S T
E
d
= − s 。
Chapter 3 旋轉壓電折返樑模型
本章對旋轉環境下固定轉速的帶有兩個末端質量塊的折返樑的理論模型進 行受力分析,得到幾何非線性模型下旋轉折返樑系統的運動方程。
其中,折返樑的結構如圖3.1 所示,它由主樑和副樑以及兩個末端質量塊構 成,並在主樑第二段黏以壓電片,其中主樑按其結構不同可分為三段,加上線型 的副樑,折返樑由四段構成。根據Su 和 Zu [44],在相同的配置下,主副樑的夾 角越大,兩共振頻越接近,因此折返樑這樣設計有著理論上的共振頻拉近的最優 效果,同時為了盡可能避免平面外運動之扭轉的影響,沒有採用主副樑分離的雙 樑結構(Cut-out Beam),這可使樑結構的長寬比大大增加,從而減少可能的平面 外的振動之影響。
模型上,本文假設折返樑樑系統滿足Euler-Bernoulli 樑理論,但放寬其小位 移振動之假設以滿足旋轉環境下大位移振動之需要。Euler-Bernoulli 樑理論假設:
(1)橫截面在其自己的平面中是無限剛性的;(2)樑的橫截面在變形後保持平 面;(3)橫截面保持垂直於樑的變形軸[45]。此外,假設折返樑結構的長寬比足 夠大,不考慮平面外之振動與扭轉。對旋轉環境,假設其旋轉速度固定,不考慮 旋轉角加速度與科氏力。更細化的假設與考慮可參見之後的章節。
3.1
旋轉壓電折返樑力學模型首先,建立旋轉坐標系統。參照圖 3.1,以旋轉軸中心建立相對坐標系,以 樑固定端的樑的中性軸為X 軸,以垂直於旋轉平面的方向為 Y 軸,以旋轉平面 裡垂直於樑固定端的樑的中性軸方向為Z 軸。定義樑的單位元在 X、Y、Z 軸方 向時間為t 的相對位移為u x ti( )i, 、v x ti( )i, 、w x ti( )i, (下標i=1,2,3,4 表示第 i 段 樑,xi(0,Li))。由於假設不存在旋轉平面外的振動,故v x t =i( )i, 0。
圖 3.1 四段折返樑系統坐標系圖
3.1.1 強迫振動方程
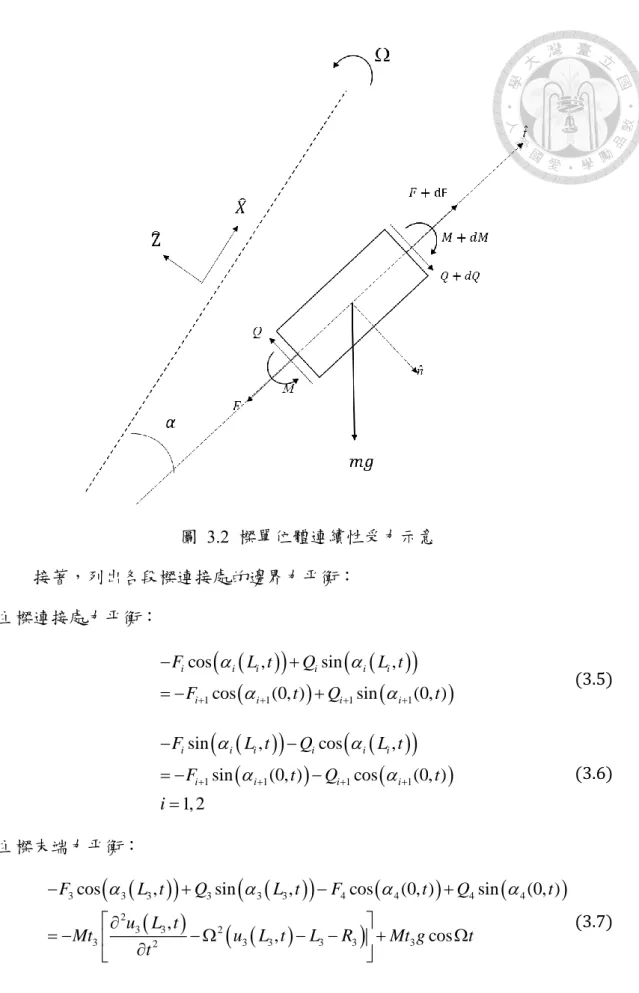
接下來,本文使用幾何非線性的方法推導折返樑系統的強迫振動方程式。本 文的幾何非線性模型在強迫振動方程的構建上很大程度參考了黃奕傑[46]的模 型結構。該理論方法與經典的強迫振動方程不同之處在於力學推導時考慮了軸向 力與軸向位移對振動方程的影響。
參考圖 3.2,將靜力平衡分解為垂直和平行與旋轉半徑方向的側向(Z)和軸 向(X)力平衡:
軸向力平衡:
(
( )) (
( ))
( )
(
( ))
2
2 2
cos , sin ,
, , cos
1, 2, 3
i i i i i i
i i
i i
i i i i i i
F x t Q x t
x x
u x t
m u x t x R m g t
t i
−
= − − − − +
=
(3.1)
( )
( ) (
( ))
( )
(
( ))
4 4 4 4 4 4
4 4
2
4 4 2
4 2 4 4 4 4 4
cos , sin ,
, , cos
F x t Q x t
x x
u x t
m u x t x R m g t
t
−
= − − − − −
(3.2)
側向力平衡:
(
( )) (
( ))
( ) ( )
2
2 2
sin , cos ,
, , sin
1, 2, 3
i i i i i i
i i
i i
i i i i
F x t Q x t
x x
w x t
m w x t m g t
t i
+
= − − −
=
(3.3)
( )
( ) (
( ))
( ) ( )
4 4 4 4 4 4
4 4
2
4 1 2
4 2 4 4 4
sin , cos ,
, , sin
F x t Q x t
x x
w x t
m w x t m g t
t
+
= − − +
(3.4)
其中,𝐹為 ˆt 方向上單位面積受力,𝑄為 ˆn 方向上單位面積受力,𝛼為單位樑 在 振 動 中 的 角 度 偏 移 , Ω 為 旋 轉 環 境 之 固 定 轉 速 , R1 =R , R2 = +R L1 ,
3 1 2
R = + +R L L ,R4 = −(R+ +L1 L2+L3)表示數學意義之旋轉半徑,mi為樑的線 密度質量。這是樑的連續性受力平衡,如圖3.2 所示。
圖 3.2 樑單位體連續性受力示意 接著,列出各段樑連接處的邊界力平衡:
主樑連接處力平衡:
( )
( ) (
( ))
( ) ( )
1 1 1 1
cos , sin ,
cos (0, ) sin (0, )
i i i i i i
i i i i
F L t Q L t
F t Q t
+ + + +
− +
= − + (3.5)
( )
( ) (
( ))
( ) ( )
1 1 1 1
sin , cos ,
sin (0, ) cos (0, ) 1, 2
i i i i i i
i i i i
F L t Q L t
F t Q t
i
+ + + +
− −
= − −
=
(3.6)
主樑末端力平衡:
( )
( ) (
( ))
( ) ( )( )
(
( ))
3 3 3 3 3 3 4 4 4 4
2
3 3 2
3 2 3 3 3 3 3
cos , sin , cos (0, ) sin (0, )
, , cos
F L t Q L t F t Q t
u L t
Mt u L t L R Mt g t
t
− + − +
= − − − − +
(3.7)
( )
( ) (
( ))
( ) ( )( ) ( )
3 3 3 3 3 3 4 4 4 4
2
3 3 2
3 2 3 3 3
sin , cos , sin (0, ) cos (0, )
, , sin
F L t Q L t F t Q t
w L t
Mt w L t Mt g t
t
− − − −
= − −
(3.8)
副樑末端力平衡:
( )
( ) (
( ))
( )
(
( ))
4 4 4 4 4 4 4
2
4 4 2
4 2 4 4 4 4
cos , sin , cos
, ,
F L t Q L t Mt g t
u L t
Mt w L t L R
t
− + +
= − − − −
(3.9)
( )
( ) (
( ))
( ) ( )
4 4 2 4 4 4 4
2
4 4 2
4 2 4 4
sin , cos , sin
, ,
F L t Q L t Mt g t
w L t
Mt w L t
t
− − −
= −
(3.10)
其中,Mt1=Mt2 =0,考慮主樑之一二段有一個不佔據空間的質量為0 的質量塊,
方便後續公式處理;Mt3 =M1、Mt4 =M2分別為主副樑末端質量塊的質量。由力 矩平衡:
i i i
i i i i i i i i i i
M I
M dM M P dw Q dx m I dx
=
+ − − + = (3.11)
其中M 為彎矩,I 為截面積慣性矩,接下來推導截面彎矩:
( )
2 1, b 2 c 2
a b
h h
s p
s p
h h
M x t = −
T b ydy−
T b ydy (3.12)( ) 2s
2
, 1, 3, 4
s
h s h
i i i s
M x t T b ydy i
= − −
=
(3.13)其中,上標𝑠和𝑝分別代表樑本身與附著的壓電材料,𝑇為截面應力。根據壓電本 構方程式的推導結果式(2.3):
1 11 1 31 3
p E p
S =s T +d E (3.14)
其中,中 11 3
1 (t)
E ,
p p
s E v
E h
= = − ,因此兩段樑之彎矩可以表示為:
( ) ( ) ( ) ( )
2 2
2 2 2 2 2 2
2 2 2 2
2 2
31
, ,
, b a
c b
a
b
h h
s s p p
h h
h
p p
h p
w x t w x t
M x t Y b y dy Y b y dy
x x
v t Y b d ydy h
= +
−
(3.15)( ) 2 2 ( ) 2
2 2
, ,
1, 3, 4
s
s
h
i i
h
i i s s
i
w x t
M x t E b y dy
x i
−
=
=
(3.16)其中,y 表示任意位置到中性軸的距離,bs、hs為樑自身的寬度與厚度,bp、hp
為壓電材料的寬度與厚度,ha為中性軸到樑自身底部的數值距離,hb為中性軸到 自身頂部的數值距離,hc為中性軸到壓電材料頂部的數值距離,可參考圖 3.3 示 意的幾何關係。考慮到樑與附著的壓電材料是復合的,因此中性軸存在偏移:
2 2
2 2
2 2
2
2 2
2 2
2
2 2
p p s s
a
s p
s p
b
s p
p p s s
c
s p
h h h nh
h nh h
nh h
h nh h
h nh h nh
h nh h
+ +
= − +
= −
+
+ +
= +
(3.17)
其中 s s
p p
n Y b
=Y b 為壓電復合樑的轉換因數。
圖 3.3 壓電折返樑耦合部分橫截面示意圖 結合幾何非線性的曲率半徑(3.23)將截面彎矩代入方程(3.11)後得到
( ) ( )
( ) ( ) ( )
( ) ( ) ( ) ( ) ( )
( )
3 2
2 3
2 2
2 2
3 3 2
3 3 2
3
, ,
, , ,
, 1 , , , ,
2 ,
i i i i
i
i i i i
i i i
i i i i i i i
i i i
i i i
i i i i i i i i i i
i
i i i i i
i i i
i i i
i
w x t w x t
Q M P m I
x x t x
YI x t w x t w x t
P m I
x x t x
w x t w x t w x t w x t w x t
YI x x x x x
w x t w
P m I
x
= − + +
= − + +
= − + +
+ +
( )
2 i,
i
x t
t x
(3.18)
其中,Pi為離心力作用,Pi = fc xi( )i ,其獲得過程參考(3.27)。 2
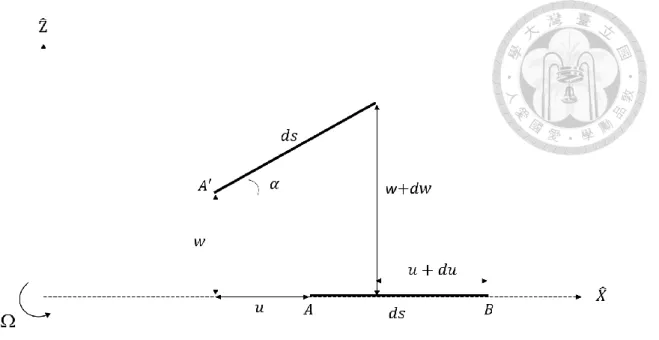
接下來考慮偏移角度的三角函數和側向位移的幾何關係。簡化單位元元長度 樑模型如圖 3.4,根據幾何關係有:
( ), 0xi1 1 i( , ) 2 0xi i( , ) 2
i i
w s t w s t
u x t ds ds
s s
=
− −
(3.19)(
( ))
( ),sin i, i i
i
w x t
x t x
=
(3.20)
(
( ))
1 ( ), 2cos , 1
2
i i
i
i
w x t
x t x
= −
(3.21)
( ) ( ),
, i i
i
dw x t
x t ds
(3.22)
曲率为:
2
2 2 2
2
2 2 2
1 1 2
1 2 d w
d ds d w d w dw
ds dw ds ds ds
ds
= − = +
(3.23)
圖 3.4 單位長度樑角度與位移偏移關係示意
對等式(3.1)(3.2)從𝑥𝑖到𝐿𝑖積分後代入主副樑末端側向力平衡等式(3.5)(3.7),獲得 𝐹𝑖與𝑄𝑖的關係:
( )
(
( )) (
( ))
( ) ( )( ) ( ) ( ) ( )
2 1
1 1
, 1 { sin , 0 Ω
cos ,
0 cos Ω , 0, }
1, 2
i i i i i i i i
i i
i i i i i i
F x t Q x t fc x fc
x t
fg x fg t fn x t fn t
i
+
+ +
= + +
− − + +
=
(3.24)
( )
(
( )) (
( ))
( ) ( )( ) ( ) ( ) ( )
2
3 3 3 3 3 3 4
3 3
3 3 4 3 3 4
, 1 { sin , 0 Ω
cos ,
0 cos Ω , 0, }
F x t Q x t fc xi fc
x t
fg x fg t fn x t fn t
= + −
− + + −
(3.25)
( )
(
( )) (
( ))
( )( ) ( )
2
4 4 4 4 4 4 4
4 4
4 4 4 4
, 1 [ sin , Ω
cos ,
cos Ω , ]
F x t Q x t fc x
x t
fg x t fn x t
= +
+ +
(3.26)
其中
( ) Li( ) ( )
i i i s i i i i i i
fc x =m
x +R dx +Mt L +R (3.27)( ) ( )
i i i i i i
fg x = L −x m +Mt g (3.28)
( ) ( ) ( )
( ) ( )
2
2 2
2
2 2
, , ,
, ,
1, 2, 3, 4
Li
i i
i i i i i
s
i i
i i i
u x t
fn x t m u x t ds
t u L t
Mt u L t
t i
= −
+ −
=
(3.29)
( ) 2
i i
fc x 為離心力 產生的項 , fg xi( )i cos Ωt 為重力的 軸向分力 產 生的項,
( ),
i i
fn x t 為慣性的軸向分力產生的項。將𝐹𝑖與𝑄𝑖的關係式(3.24)(3.25)(3.26)代回前 面主副樑末端軸向力平衡式(3.6)(3.8)(3.10)獲得折返樑系統在縱向平面的強迫振 動方程式為:
( ) ( ) ( ) ( )
( ) ( ) ( )
2 2
4 4
2 2
2
2 2
, ,
, ,
, ,
+ ,
sin 1, 2, 3
i i i i
i i
i i
i i
i i
i
i i
i i i i
i i i i
i
i
w x t w x t
x x
w x t
x x
w x t
YI x x
w x t w x t
m w x t AF
t x
m g t
i
+
− −
=
=
(3.30)
( ) ( ) ( ) ( )
( ) ( ) ( )
2
4 4 4 4
2
4 4
4 4
4
4 4 4 4
4 4
4 4
2 2
4 4 2 4 4
4 2 4 4 4 2
4
4
, ,
, ,
, ,
+ ,
sin
w x t w x t
x x
w x t
w x t x x
YI x x
w x t w x t
m w x t AF
t x
m g t
+
− −
= −
(3.31)
其中,代表軸向受力的AF 表示为:
( ) ( ) ( ) ( ) ( ) ( ) ( )
2
1 1
1
, 0 Ω 0 cos Ω
, 0,
1, 2
i i i i i i i i
i i i
AF x t fc x fc fg x fg t
fn x t fn t i
+ +
+
= + − −
+ +
=
(3.32)
( ) ( ) ( ) ( )
2
3 3 3 3 4 3 3 4
3 3 4
, (0) (0) cos
, (0, )
AF x t fc x fc fg x fg t
fn x t fn t
= − − +
+ − (3.33)
( ) ( ) 2 ( ) ( )
4 4, 4 4 Ω 4 4 cos Ω 4 4,
AF x t = fc x + fg x t+ fn x t (3.34) 此即旋轉折返樑之幾何非線性的強迫振動方程式。接下來給出運動方程的邊界條 件。主樑的固定端邊界條件為:
( ) ( )
1
1
1 1
1 0
0, 0
, 0
x
w t w x t
x =
=
=
(3.35)
主樑各段的連續條件為:
( , ) 1( )0,
i i i
w L t =w+ t (3.36)
( ) ( )
1
1 1
1 0
, ,
i i i
i i i i
i x L i x
w x t w x t
x x
+
+ +
= + =
= (3.37)
( ) ( )
1
2 2
i i 1 1
2 1 2
1 0
w , w ,
i i i
i i
i i
i x L i x
x t x t
YI YI
x x
+
+ +
+
= + =
= (3.38)
( ) ( ) ( ) ( ) ( )
( ) ( ) ( ) ( )
( ) ( ) ( )
1
2 2
3 2 3
i i i
3 2 3
2
i i 2
2
2
i 1 1 i 1 1
1 2 1 1
1 1
, , , , ,
, ,
sin Ω Ω ,
, ,
i i
i
i i i i i i i
i
i i i i i
i i
i i i i i i
i x L
i i
i i i
i i x
x t w x t w x t w x t w x t
YI x x x x x
w x t w x t
AF x Mt g t Mt w x t
x t
w x t w x t
YI AF x
x w
x +
=
+ + + +
+ + +
+ +
+ +
− + − −
= −
0
1, 2 i
=
=
(3.39)
主樑與副樑的連續條件為:
( ) ( )
3 3, 4 0,
w L t = −w t (3.40)
( ) ( )
3 3 4
3 3 4 4
3 4 0
, ,
x L x
w x t w x t
x = x =
= (3.41)
![圖 1.4 蒲公英狀多方向壓電振動能量採集器[24]; 相比一般的振動環境,旋轉環境下的振動振幅更大,樑在旋轉中產生了較大 的軸向力和橫向偏轉,因此常常會體現出幾何非線性的現象。因此,有關旋轉條 件下的研究絕大部分會集中在理論模型的優化和擬合上。 1988 年,Yigit 等人[25] 推導出旋轉懸臂樑完全耦合的非線性運動方程,並以數值解研究其波形;Gu 和 Livermore [26]以實驗驗證旋轉環境離心力對系統的被動調頻的作用;Hsu [27]構 建了旋轉懸臂樑末端質量塊結構的有限元素模型並以實驗](https://thumb-ap.123doks.com/thumbv2/9libinfo/9604623.630781/17.892.169.694.558.873/蒲公英狀多方向壓電振動能量採集相比一般振動環境旋轉環境下的.webp)
![圖 1.6 旋轉式採集器 (a)雙自由度朝內樑磁力旋轉能量收集器[33];(b)三穩態旋轉壓電能量收集器 [35];(c)旋轉朝內樑擋板系統[36];(d)旋轉平面外旋轉能量收集器[38];(e)旋轉 雙穩態彎曲樑能量收集器[40];(f)基于輪胎嵌入的耦合結構能量收集器[41]; 在本文中,將以四段式的折返梁幾何結構為基礎,置於旋轉環境中,綜合以 多模態法和引入非線性力的方法達到拓寬頻寬的效果,希望藉此獲得低頻下相互 連接的雙模態寬頻效果。](https://thumb-ap.123doks.com/thumbv2/9libinfo/9604623.630781/19.892.457.785.106.374/旋轉式採集器雙自由度朝內樑磁力旋轉能量收集器三穩態旋四段式.webp)