第參章 研究方法與步驟
第一節、實驗參加者
實驗參加者為男子羽球隊員 8 名,皆為現役甲組選手;
慣用側均為右側。實驗前參加者應先詳讀「實驗參加者需知 及參與同意書」(附錄一),並了解本實驗之目的與流程,且 參與實驗時無任何部位之運動傷害。實驗參加者基本資料如 表 3-1。
表 3-1 實驗參加者基本資料
年齡 (歲)
身高 (公分)
體重 (公斤)
球齡 (年)
人數=8
平均數
(M) 20.13 175.88 71.25 10.88 標準差
(SD) 1.13 2.95 6.43 1.36
第二節、實驗時間與地點
實驗時間:中華民國 96 年 4 月 19 日、20 日。
實驗地點:國立臺灣師範大學公館校區運動生物力學實驗室
第三節、實驗儀器與設備
本實驗主要之實驗儀器與設備有:
(一) VICON Motion Capture System 一套及高速數位影像擷取攝影機 10 部。
(二) L-frame 參考架和 T 型校正棒。
(三) Kistler 測力板 1 塊 (60cm x 40cm)。
(四) Foot Switch 開關 3 組。
(五) 燈號控制器及燈號架 (高 250 公分,長、寬各 100 公分)。
(六) 羽球柱 2 隻。
(七) 羽球網 1 面。
(八) 反光球 80 顆。
B
A C
圖 3-1 實驗器材,A:燈號架、B 燈號控制器、
C:測力板及 FootSwitch 開關
第四節、實驗場地配置
場地佈置如圖 3-2,場地為正式羽球競賽單打場地,配合實驗需 要,將羽球網往測力板方向移動 30 公分,三顆羽球分別吊於球網上,
第一顆 (左前方) 與第 3 顆 (右前方) 皆離邊線 30 公分,第二顆則在 正中央,羽球離地高度為 130 公分 (如圖 3-3),燈號架擺設於正前方,
攝影機配置如圖 3-4。Foot Switch 開關黏貼於測力板上,測力板中心 與羽球網之直線距離為 320 公分。
圖 3-2 場地配置圖 羽球網
Vicon
燈號控制器
◎ ◎ ◎ 燈號架
30cm
30cm 30cm
320cm
測力板
Foot switch 開關
圖 3-3 球柱、球網、球及燈光器配置圖
圖 3-4 攝影機配置圖(由正上方俯視) 130cm
1 2 3
X
Y
第五節、實驗流程
實驗開始前,研究者先向實驗參加者說明整個實驗的目的與流程,
並請實驗參加者詳讀並填寫「實驗參加者需知及參與同意書」。
(一)儀器同步
本實驗使用 VICON Motion Capture System 高速數位影像擷取攝 影機 10 部 (250Hz)、測力板 (1000Hz)、Foot Switch 開關及燈號控制 器進行同步。同步啟動的來源為 Foot Switch 開關,當實驗參加者準 備好時,右腳先站在 Foot Switch 開關上,然後當實驗參加者起跳離 開瞬間,由 Foot Switch 產生訊號,同時傳至 VICON Motion Capture System 系統及燈號控制器產生同步 (燈號器亮燈,亮燈順序為隨機),
並由 VICON Nexus 1.3 版軟體得知訊號產生時間,可與測力板進行同 步資料對照。
(二)空間與座標校正
1.動態校正 (dynamic calibration):第一步驟為動態校正,使用 T 型校 正棒在每一台攝影機範圍內揮動,揮動範圍盡量充滿每臺攝影機 的二維畫面。
2.靜態校正 (static calibration):第二步驟為靜態校正,將 L 參考架 (L-frame) 固定於實驗室中,由此定義出實驗室的座標系統位置。
3.實驗參加者校正 (subject calibration):實驗參加者貼好反光球後以 T-pose 姿勢 (雙腳與肩同寬、雙手平舉、掌心朝下、上身挺直),
站立於測力板上,由 VICON Nexus 1.3 軟體擷取畫面。
(三)實驗步驟:
1.向實驗參加者說明實驗流程。
2.填寫實驗參加者需知及參與同意書。
3.實驗參加者換穿束褲後貼上反光球(如圖 3-5、圖 3-6 及表 3-2)。
4.實驗參加者在一旁等待並熱身。
5.實驗參加者校正:以 T-pose 姿勢擷取畫面。
6.實驗參加者熟悉動作:在正式開始測試前,讓實驗參加者先熟悉動 作,並了解燈號的產生方式,同時檢查反光球是否黏貼牢固。
7.開始實驗:
(1)實驗參加者右腳站在測力板的 Foot Switch 開關上,等待口令(如 圖 3-7)。
(2)主試者喊開始後,實驗參加者依自己意願,在自己認為準備好的 情況下,開始動作。
(3)當實驗參加者開始起跳瞬間,燈號架隨機亮燈,1 號為往左前方 移動,2 號為往正前方移動,3 號為往右前方移動。
(4)實驗參加者起跳著地後,依照燈號所代表的方向,使用跨二步之 上網步法 (以最快速度移動,如圖 3-8),並用放小球方式讓球拍 碰觸羽球。
(5)每完成一次動作,讓實驗參加者休息 3~5 分鐘。
(6)每位實驗參加者至少要在每個方向都完成 3 次以上,才算完成。
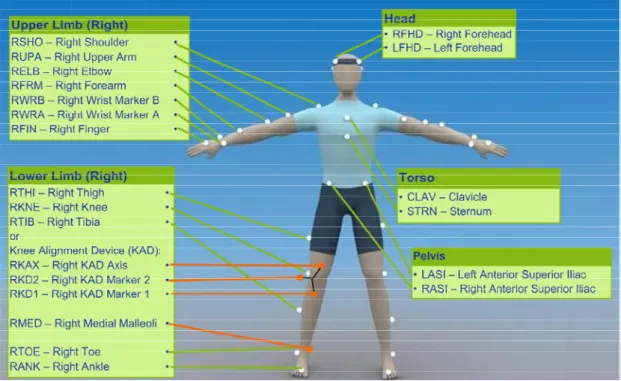
圖 3-5 反光球黏貼位置圖-正面
註:圖中 Knee Alignment Device(KAD)部分(橙色線條所標記之位置)不採用。資 料來源:Vicon, 2008
圖 3-6 反光球黏貼位置圖-反面
註:圖中 Knee Alignment Device(KAD)部分及 SACR(橙色線條所標記之位置)不 採用。資料來源:Vicon, 2008
表 3-2 反光球標記黏貼位置代號說明表
編號 代號 黏貼位置 編號 代號 黏貼位置
1 LFHD 額頭左前 19 RFIN 右第三掌骨末端 2 RFHD 額頭右前 20 LASI 左腸骨前上脊 3 LBHD 頭後左側 21 RASI 右腸骨前上脊 4 RBHD 頭後右側 22 LPSI 左腸骨後上脊 5 C7 第七頸椎脊突 23 RPSI 右腸骨後上脊 6 T10 第十胸椎脊突 24 LTHI 左大腿外側下部 1/3 處 7 CLAV 胸鎖關節 25 LKNE 左膝外側
8 STRN 胸骨 26 LTIB 左小腿外側下部 1/3 處 9 RBAK 右肩後側 27 LANK 左踝外側
10 LSHO 左肩鎖骨關節 28 LHEE 左後側跟骨 11 LELB 左肱骨外上髁 29 LTOE 左第二蹠骨前端 12 LWRA 左內側莖狀突 30 RTHI 右大腿外側上部 1/3 處 13 LWRB 左外側莖狀突 31 RKNE 右膝外側
14 LFIN 左第三掌骨末端 32 RTIB 右小腿外側上部 1/3 處 15 RSHO 右肩鎖骨關節 33 RANK 右踝外側
16 RELB 右肱骨外上髁 34 RHEE 右後側跟骨 17 RWRA 右內側莖狀突 35 RTOE 右第二蹠骨前端 18 RWRB 右外側莖狀突
圖 3-7 實驗參加者準備姿勢
A B C
D1 D2 D3
E1 E2 E3
F1 F2 F3
圖 3-8 實驗參加者動作圖,A 為準備姿勢,B 為起跳至最高點,C 為起跳後着地。D 為往左前方,E 為往正前方,F 為往右前方;數字 1 為左腳抬起,右腳推蹬 (右腳從着地到離地的支撐階段為本研究主 要動力學資料的擷取範圍),2 為左腳著地推蹬帶動右腳往前,3 為右 腳着地並以放小球方式讓球拍碰觸目標 (羽球)。
左腳 右腳
第六節、資料蒐集與處理
本實驗是使用 VICON Nexus 1.3 軟體當中的 Plug-in Gait Full Body Models 來進行運動學及動力學的資料處理與運算。利用 L-frame 參考架及 T 型校正棒進行空間與座標校正,在座標系統的設定上,以 笛卡兒右手定則座標系統 ( right-handed Cartesian coordinate system) 為原則,定義 X 軸、Y 軸與 Z 軸 (如圖 3-9)。
圖 3-9 實驗室座標軸圖
測力板的方向定義與空間坐標定義相同,X 軸向的力是左右方向 的力,正值表示反作用力往右,負值表示往左;Y 軸向的力是前後方 向的力,正值表示反作用力往前,負值表示往後;Z 軸向的力是垂直 方向的力,正值表示反作用力往上,負值表示往下。
X
Y Z
(一)關節中心
本實驗分析的數據以下肢為主,因此關節中心部分僅利用到下肢 各關節的關節中心:
1.髖關節中心
主 要 是 使 用 Newington-Gage Model{Newington Children’s Hospital (NCH) 在 1981 年對 25 個髖關節的放射學 (radiographic) 研 究 } 來 定 義 髖 關 節 中 心 在 骨 盆 (pelvis) 肢 段 當 中 的 位 置 (Davis, Ounpuu , Tyburski , & Gage, 1991; 吳信璋,2006)。以左髖關節中心位 置 (Xh,Yh,Zh) 為例 (圖 3-10),計算方式如下:
X S C sin θ dASIS 2
Yh ydis rmarker cos β C cos θ sin β
Z y r sin β C cos θ cos β
其中,C 0.115L 15.3,Y 0.1288L 48.56 符號說明:
S:左側為-1,右側為+1。
C:左腸骨前上脊與左髖關節中心 2 點在骨盆額狀面的直線距離,
為腿長平均值的函數,單位為公分。
dASIS:腸骨前上脊間距,單位為公分
Y :左腸骨前上脊與左髖關節中心 2 點在骨盆矢狀面上的直線距 離投影在水平線的長度,單位為公分。
L :左腿長。
L:左腿與右腿長的平均值。
r :反光球的半徑,單位為公分。
θ:為 28.4 度,所以sin θ=0.476,cos θ=0.88。
β:為 18 度,所以sin β=0.309,cos β=0.951
圖 3-10 髖關節中心在骨盆嵌入式系統位置圖
註:左圖為額狀面幾何關係、右圖為矢狀面幾何關係圖,X、Y、Z Pelvis 分別表 示骨盆嵌入座標系統的 X 軸、Y 軸與 Z 軸 (修改自 Davis 等, 1991)。
2.膝關節中心
當髖關節中心計算出來後,就可計算膝關節中心。由膝關節外側 反光球 (KNE)、大腿外側反光球 (THI) 及髖關節中心所構成的平面 上,位於股骨內上髁與股骨外上髁連線的中點,也就是股骨嵌入式座 標系統 (femur embedded coordinate system) 的原點 (origin),以左膝 關節為例,若髖關節中心到膝關節中心連線座標系統為 Z 軸 (Zfemur),
膝關節中心到膝關節反光球的連線座標系統為 X 軸 (Xfemur),求出 LKO (左膝關節的偏移量) 的長度 (Kadaba, Ramakrishnan, & Wootten, 1990; 吳信璋,2006):
LKO r Left Knee width 2
符號說明:
LKO:左膝關節偏移量,為左膝關節反光球與左膝關節中心之間 的直線距離。
r :反光球的半徑,單位為公分。
Left Knee width:左膝關節的寬度。
3.踝關節中心
當膝關節中心計算出來後,就可計算踝關節中心。由踝關節外側 反光球 (ANK)、小腿外側反光球 (TIB) 及膝關節中心所構成的平面 上,位於踝關節內髁與踝關節外髁連線的中點,也就是扭轉脛骨嵌入 式 座 標 系 統 (tortioned tibia embedded coordinate system) 的 原 點 (origin),以左踝關節為例,若膝關節中心到踝關節中心連線座標系統 為 Z 軸 (ZT-Tibia),踝關節中心到踝關節反光球的連線座標系統為 X 軸
(XT-Tibia),求出 LAO (左踝關節的偏移量) 的長度 (Kadaba 等, 1990;
吳信璋,2006):
LAO r Left ankle width 2
符號說明:
LAO:左踝關節偏移量,為左踝關節外髁反光球與左踝關節中心 之間的直線距離。
r :反光球的半徑,單位為公分。
Left ankle width:左踝關節的寬度。
圖 3-11 代號轉換與說明:
P1=Y pelvis、P2=X pelvis P3= Z pelvis
HIP=髖關節中心
T1=Y femur、T2= X femur T3=Z femur、□K=LKO KNEE TO=膝關節中心 S1=Y tortioned tibia、
S2=X tortioned tibia S3=Z tibia
□A =LAO
ANKLE SO=踝關節中心
圖片資料來源:Vicon, 2003
圖 3-11 左腳膝關節中心與踝關節中心模型
在圖 3-11 中,(1)左膝關節中心 (KNEE TO):當 HIP 位置計算出 來以後,接著計算□K 的長度,而因為 LKNE 與 LTHI 位置已知,且 HIP 到 LKNE 的長度可以求出,又 HIP、LKNE、LTHI 與 KNEE TO 在同一平面上(Plane T),最後可算出 KNEE TO 的位置。(2)左踝關節 中心 (ANKLE SO):當 KNEE TO 計算出來以後,接著計算□A 的長度,
而因為 LANK 與 LTIB 位置已知,且 KNEE TO 到 LANK 的長度可以 求出,又 KNEE TO、LANK、LTIB 與 ANKLE SO 在同一平面上 (Plane S),最後可算出 ANKLE SO 的位置。
以上關節中心皆以左腳為範例,可用相同計算式推導出右腳。
(二)運動學資料
當求出髖關節中心、膝關節中心與踝關節中心後,透過尤拉角 (Euler angles)的旋轉矩陣,計算相鄰肢段的在三度空間的相對角度,
本研究定義對參考座標 X 軸旋轉角度θχ ,亦即最先發生角度的θχ 的彎曲/伸直動作,接著對 Y 軸旋轉角度θy ,而發生角度θy的內收/
外展動作,最後對接著對 Z 軸旋轉角度θZ ,而發生角度θZ的內旋/
外旋動作。若已知移動肢段的單位向量為 (Iz, Jz, Kz),近端嵌入式系 統在絕對參考系統的單為 (I, J, K),則移動肢段與近端之間的角度θχ、 θy與θZ的關係如下 (Kadaba 等, 1990):
I J K
C1 C3 S1 S2 S3 C2 S3 S1 C3 C1 S2 S3 C1 S3 S1 S2 S3 C2 S3 S1 S3 C1 S2 C3
S1 C2 S2 C1 C2
I J K θχ sin 1 Kz I/ cos θ
θy sin K J
θZ sin 1 Iz J/ cos θ 符號說明:
C1:cos θ C2:cos θ C3:cos θ S1:sin θ S2:sin θ S3:sin θ
關節角度的定義是使用相鄰兩個肢段的空間相對方位,因此由 股骨嵌入式系統與骨盆嵌入式系統的關係可求出髖關節角度,由非扭 轉脛骨嵌入式系統與股骨嵌入式系統的關係可求出膝關節角度,由腳 掌嵌入式系統與扭轉脛骨嵌入式系統的關係可求出踝關節角度。
在本研究的各關節角度,在 X 軸方向表示在矢狀面的運動,Y 軸方向表示在額狀面的運動,Z 軸方向表示在水平面的運動,各關節 角度動作定義如下:
1.髖關節角度 (大腿與骨盆間的角度)
(1)X軸向:正值表示彎曲 (flexion),負值表示伸展 (extension)。
(2)Y 軸向:正值表示內收 (adduction),負值表示外展 (abduction)。
(3)Z 軸向:正值表示內旋 (internal rotation),負值表示外旋 (external rotation)。
2.膝關節角度 (大腿與小腿間的角度)
(1)X 軸向:正值表示彎曲 (flexion),負值表示伸展 (extension)。
(2)Y 軸向:正值表示內翻 (varus/adduction),負值表示外翻 (valgus/adbuction)。
(3)Z 軸向:正值表示內旋,負值表示外旋。
3.踝關節 (小腿與腳掌間的角度)
(1)X 軸向:正值表示背曲 (Dorsiflexion,踝關節彎曲),負值表示蹠 曲 (plantar flexion,踝關節伸展)。
(2)Y 軸向:正值表示內翻 (inversion/adduction),負值表示外翻 (eversion adbuction)。
(3)Z 軸向:正值表示內旋,負值表示外旋。
踝關節 X 軸向以站立時直角角度為 0 度。
(三)關節作用力、關節肌肉淨力矩與功率
關節作用力、關節肌肉淨力矩與功率的計算主要是利用已求得之 運動學資料、結合測力板的地面反作用力資料與人體肢段參數,使用 動力學逆過程求出下肢各關節的作用力、肌肉淨力矩與功率。在計算 的過程中,對於肢段關節鏈結模型的假設為:
1.每個肢段的質量是固定的不變的,而且集中在質心一點上。
2.在運動時質心的位置、肢段的長度以及轉動慣量是固定不變的。
3.所有的關節都是為絞鏈關節(hinge joint)。
以下為動力學逆過程計算公式介紹(Winter, 2004):
1.關節作用力
∑ m or m
∑ m or m
∑ m or mg m
符號說明:
、 、 :肢段質心在 x、y、z 軸方向的加速度。
、 、 、 、 與 :x、y、z 分別代表軸方向,p 為關節近端產生的作用力,d 為關節遠端產生的作用力。
m=肢段質量。
g=重力加速度。
2.關節肌肉淨力矩
∑
∑
∑
符號說明:
、 、 :在 x、y、z 軸向的轉動慣量。
、 、 :肢段質心在 x、y、z 軸方向的角速度。
、 、 :肢段質心在 x、y、z 軸方向的角加速度。
、 、 :關節遠端在 x、y、z 軸方向產生的肌肉淨力矩。
、 、 :關節近端在 x、y、z 軸方向產生的肌肉淨力矩。
、 、 、 、 與 :x、y、z 分別代表軸方向,p 為關節近端產生的作用力,d 為關節遠端產生的作用力。
:肢段質心到關節近端的距離。
:肢段質心到關節遠端的距離。
在動力學逆過程計算當中,由於運動學資料已先計算出,而由肢 段參數可以得知轉動慣量及肢段與質心的距離參數 (也就是 、 、 、
為已知),因此:
(1) 在踝關節部分
由測力板可得知 、 、 及 、 、 的數據,
因此可計算出踝關節的 、 、 及 、 、 的資料。
(2) 在膝關節部分
踝關節部分的 、 、 及 、 、 轉為計算膝
關節時的 、 、 及 、 、 ,因此可求出膝關節
的 、 、 。
(3) 在髖關節部分
膝關節部分的 、 、 及 、 、 轉為計算髖
節時的 、 、 及 、 、 ,因此可求出髖關節的 、
、 。
3.關節功率
當關節力矩求出後即可計算關節功率:
, ,
, ,
符號說明:
:關節遠端的功率。
、 、 :關節遠端在 x、y、z 軸方向的功率。
、 、 :關節遠端在 x、y、z 軸方向產生的肌肉淨力矩。
、 、 :關節遠端在 x、y、z 軸方向的角速度。
:關節近端的功率。
、 、 :肢段近端在 x、y、z 軸方向的功率。
、 、 :關節近端在 x、y、z 軸方向產生的肌肉淨力矩。
、 、 :關節近端 x、y、z 軸方向的角速度。
本研究使用 VICON Nexus1.3 版,套用 Plug-In Gait Full Body 模 式,經由計算所得出來的下肢各關節資料中,是採用遠端肢段肢體相 對於近端肢段座標 X、Y、Z 軸的資料進行運算。
在關節肌肉淨力矩的定義上:
(1) 髖關節 (肢段軸:大腿)
X 軸向:伸展力矩作用為正值,彎屈力矩作用為負值。
Y 軸向:外展力矩作用為正值,內收力矩作用為負值。
Z 軸向:外旋力矩作用為正值,內旋力矩作用為負值。
(2) 膝關節 (肢段軸:小腿)
X 軸向:伸展力矩作用為正值,彎屈力矩作用為負值。
Y 軸向:外翻力矩作用為正值,內翻力矩作用為負值。
Z 軸向:外旋力矩作用為正值,內旋力矩作用為負值。
(3) 踝關節(肢段軸:腳掌)
X 軸向:伸展 (蹠曲) 力矩作用為正值,彎屈 (背屈) 力 矩作用為負值。
Y 軸向:外翻力矩作用為正值,內翻力矩作用為負值。
Z 軸向:外旋力矩作用為正值,內旋力矩作用為負值。
在關節功率上,當關節肌肉淨力矩與關節角速度為同方向時,功 率 P 值為正,表式肌肉向心收縮產生能量;當關節肌肉淨力矩與關節 角速度相反方向時,功率 P 值為負,表示肌肉離心收縮吸收能量。肌 肉本身並不會自動作離心收縮,只有在外力的作用下才可使肌肉成為 離心收縮狀態,這個外力包括重力和地面反作用力 (Winter, 2004)。
第七節、資料分析
一、資料修勻與人體肢段參數
本實驗主要是利用VICON Nexus 1.3版軟體,收集攝影機 (250Hz) 的運動學資料與測力板 (1000Hz) 的動力學資料;使用Plug-In Gait Full Body模式點取35點反光球標誌點,並以Woltring filtering routine 進行資料修勻。人體肢段參數是採用Winter (2004) 的資料。將人體分 成頭、軀幹、右上臂、左上臂、右前臂、左前臂、右手掌、左手掌、
右大腿、左大腿、右小腿、左小腿、右腳掌、左腳掌,共十四個肢段。
各肢段間是以關節連接,並把每個肢段當成是一同密度的剛體 (Rigid Body)。
二、資料選擇與運算 (一)資料選擇:
透過軟體及影片資料,選擇各方向在完成時間上最快的作為分析 用的資料。
(二)資料運算:
所有資料經VICON Nexus 1.3版軟體運算後輸出 (Export),以 Microsoft○R Office Excel 2007軟體開啟副檔名為csv的檔案,配合 VICON Nexus 1.3影片與測力板數據,確認起跳瞬間到球拍碰觸羽球 瞬間的影片張數,並在Excel 2007工作環境下抓取所需要的資料(著地 支撐期間),先計算出地面反作用力的合力後,以CubicSpline函數公 式先將支撐期地面反作用力資料的時間標準化(將資料分成101點),
求得所需要之分期點(WA:體重承受期、PP:最大推蹬期及及FP:推 蹬後期)後,再將關節角度與關節力矩等資料時間標準化後,依照分 期點擷取各分期資料後進行計算。關節角度的單位為度,關節肌肉力
矩為除以體重後標準化單位:Nm/kg,關節功率為除以體重後標準化 單位:W/kg。
在關節功率的吸能及產能計算,是將擷取後的功率(power)資料,
先進行分類,負值為吸能,正值為產能。由於資料與資料間的相隔是 0.004 秒(影片為每秒 250 張),將所有負值資料相加後*0.004 即可得 到吸能資料,而所有正值資料相加後*0.004 即可得到產能資料,單位 為 J/kg。
三、統計方法
本研究使用SPSS 15.0 for Windows統計軟體,針對實驗參加者在 不同方向之表現以相依樣本單因子變異數分析進行考驗,達顯著差異 時,以LSD最小顯著差異法進行事後比較,統計水準設為α=.05。因 本研究之地面反作用力正(+)負號(-)代表方向,淨關節肌肉力矩正(+) 負號(-)代表作用肌群,因此在進行統計分析時,會以將資料轉成絕對 值進行分析。