Abstract—Some fuzzy rule interpolation methods have been presented for sparse fuzzy rule-based systems based on interval type-2 fuzzy sets. However, they have the drawbacks that they can not guarantee the convexity of the fuzzy interpolated result and may generate the same fuzzy interpolated result with respect to different observations. In this paper, we present a new method for fuzzy rule interpolation for sparse fuzzy rule-based systems based on the ratio of fuzziness of interval type-2 fuzzy sets. It can overcome the drawbacks of the existing methods. We also use some examples to compare the fuzzy interpolated results of the proposed method with the results by the existing methods. The proposed fuzzy rule interpolation method gets more reasonable results than the existing methods.
I. I
NTRODUCTIONIn recent years, some methods [1]-[3], [5]-[9], [11], [17]-[22] have been presented for fuzzy rule interpolation based on type-1 fuzzy sets [23]. Moreover, some methods [4], [13] have been presented to deal with fuzzy rule interpolation for sparse fuzzy rule-based systems based on interval type-2 fuzzy sets [15]. In [4], Chang and Chen presented a method for fuzzy rule interpolation based on principle membership functions and uncertainty grade functions of interval type-2 fuzzy sets. However, the method presented in [4] has the drawback that it can not guarantee the convexity of the fuzzy interpolated result. In [13], Lee and Chen presented a method for fuzzy rule interpolation based on the ranking values of interval type-2 fuzzy sets. However, the method presented in [13] has the drawback that it will generate the same fuzzy interpolated result with respect to different observations. Therefore, it is necessary to develop a new method for fuzzy rule interpolation for sparse fuzzy rule-base systems based on interval type-2 fuzzy sets.
In this paper, we present a new method for fuzzy rule interpolation based on the ratio of fuzziness of interval type-2 fuzzy sets. It can overcome the drawbacks of the methods presented in [4] and [13]. First, it calculates the weights of the closest fuzzy rules with respect to the observation to obtain an intermediate consequence fuzzy set. Then, it uses the ratio of fuzziness of interval type-2 fuzzy sets to infer the fuzzy interpolated result based on the intermediate consequence fuzzy set. We also use some examples to compare the fuzzy interpolated results of the proposed method with the results by the methods presented in [4] and [13]. The proposed fuzzy rule interpolation method gets more reasonable results than
S.-M. Chen and Y.-C. Chang are with the Department of Computer Science and Information Engineering, National Taiwan University of Science and Technology, Taipei, Taiwan, R. O. C. (e-mail:[email protected]; [email protected]).
the methods presented in [4] and [13].
II. P
RELIMINARIESIn this section, we briefly review the definition of polygonal interval type-2 fuzzy sets [4].
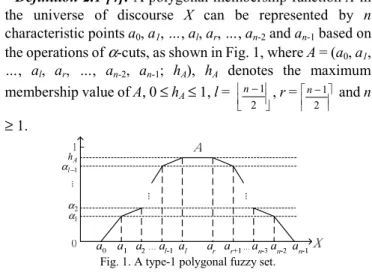
Definition 2.1 [4]: A polygonal membership function A in the universe of discourse X can be represented by n characteristic points a
0, a
1, …, a
l, a
r, …, a
n-2and a
n-1based on the operations of α -cuts, as shown in Fig. 1, where A = (a
0, a
1,
…, al
, a
r, …, a
n-2, a
n-1; h
A), h
Adenotes the maximum membership value of A, 0 ≤ h
A≤ 1, l =
⎥⎦⎥
⎢⎣⎢ − 2 1 n
, r =
⎥⎥⎤
⎢⎢⎡ − 2 1 n
and n
≥ 1.
−1
αl
α2
α1 hA
Fig. 1. A type-1 polygonal fuzzy set.
The representative value “Rep(A)” of the polygonal type-1 fuzzy set A shown in Fig. 1 is defined by [5], [8]
Rep(A) =
n a a
a
a0+ 1+ 2+ ...+ n 1−
. (1) Definition 2.2 [4]: A polygonal interval type-2 fuzzy set
A~is an interval type-2 fuzzy set whose upper membership function
A~Uand lower membership function
A~Lare polygonal membership functions, respectively. A polygonal interval type-2 fuzzy set
A~can be represented by
A~= <
A~L,
U>,
A~
as shown in Fig. 2, where
A~L=
(a0L ,a1L, ...,alL ,arL, ),; ,
..., L L
1 L
2 n A~
n a h
a− − A~U (a0U ,a1U, ...,alU,aUr ,...,anU2 ,anU1 ;hA~U),
−
= − hA~L
and
hA~Uare the maximum membership values of
A~Land
AU~
, respectively, and 0 ≤
hA~L≤
hA~U≤ 1.
AU
h~
0U
a a0L a1U a2U alU−1 alUarU aUr+1 anU−3anU−2aLn−1anU−1 1L
a a2L alL−1 alLarL arL+1 aLn−3anL−2
A~U
A~L
α2
α1 AL
h~
Fig. 2. A polygonal interval type-2 fuzzy set A~ .
A New Method for Fuzzy Rule Interpolation Based on the Ratio of Fuzziness of Interval Type-2 Fuzzy Sets
Shyi-Ming Chen, Senior Member, IEEE, and Yu-Chuan Chang
978-1-4244-8126-2/10/$26.00 ©2010 IEEE
Definition 2.3: Given an interval type-2 fuzzy set
A~, where
A~= <
A~L,
A~U>, the representative value Rep(
A~) of the interval type-2 fuzzy set
A~is calculated as follows:
⎪⎪
⎪
⎩
⎪⎪
⎪
⎨
⎧
=
−
>
−
−
×
−
×
=
0, ) ( ) ( if ), (
0, ) ( ) ( if
) ,
( ) (
) ( ) ( ) ( ) (
) (
L U
U
L U
L U
L L
U U
A~ Area A~
Area A~
ep R
A~ Area A~
Area A~ Area A~
Area
A~ Area A~ ep R A~ Area A~ ep R A~ ep
R
(2)
where Rep(
A~L) and Rep(
A~U) denote the representative values of the lower membership function
A~Land the upper membership function
A~U, respectively, and
(A~L)Area
and
)(A~U
Area
denote the areas of
A~Land
A~U, respectively.
Let Rep(
A~) and Rep(
B~) be the representative values of the interval type-2 fuzzy sets
A~and
B~, respectively. If
Rep(A~) ≤ Rep(
B~), then
A~is at the left-hand side of
B~. Otherwise,
A~is at the right-hand side of
B~.
Definition 2.4: Given an interval type-2 fuzzy set
A~, where
A~= <
A~L,
A~U>, the fuzziness Fuzziness(
A~) of the interval type-2 fuzzy set
A~is defined as follows:
2
) ( ) ) (
( U A~L
Area A~
A~ Area
Fuzziness = +
, (3) where
(A~L)Area
≤
Fuzziness(A~)≤
Area(A~U),
(A~L) Areaand
(A~U)Area
denote the areas of
A~Land
A~U, respectively,
)(A~L
Area
≥ 0 and
Area(A~U)≥ 0. The larger the value of
Fuzziness(A~), the larger the fuzziness of the interval type-2 fuzzy set
A~.
Definition 2.5: Let
A~be an interval type-2 fuzzy set in the universe of discourse X, where
A~= <
A~L,
A~U>. If both the lower membership function
A~Land the upper membership function
A~Uare convex, then
A~is called a convex interval type-2 fuzzy set.
III. A N
EWM
ETHOD FORF
UZZYR
ULEI
NTERPOLATIONB
ASED ON THER
ATIOS OFF
UZZINESS OFI
NTERVALT
YPE-2 F
UZZY SETSLet us consider the following multiple fuzzy rules interpolation scheme using polygonal interval type-2 fuzzy sets:
Rule 1: If X1 is A~1,1
and X2 is A~1,2
and … and Xm is A~,m
1 Then Y is B~1 Rule 2: If X1 is A~2,1
and X2 is A~2,2
and … and Xm is A~,m
2 Then Y is B~2 Rule t: If X1 is A~t,1
and X2 is A~t,2
and … and Xm is A~t,m
Then Y is B~t Observation: X1 is A~1∗
and X2 is A~2∗
and … and Xm is ∗
A~m
Conclusion: Y is B~∗
where X
jdenotes the jth antecedent variable, Y denotes the consequence variable, the jth antecedent fuzzy set
A~k j,
of the fuzzy rule Rule k is represented by
( ..., L ; L ),1 - L ,
1 L ,
0
, kj kjn A~k,j
kj ,a , a h
< a
, ) ; ...,
( U U
1 - , U
1 , U
0
, >
j , Ak n ~ kj kj
kj ,a , a h
a
the consequence fuzzy set
B~kof the fuzzy rule Rule k is represented by
<(bkL,0,bkL,1, ...,bkL,n-1 ;),
L,j
B~k
h (bkU,0 ,bkU,1, ...,bkU,n-1; U )>
j ,
B~k
h
, the observation fuzzy set
∗j
A~
is represented by
(a*Lj,0 ,a*Lj,1 ,a*Lj,2 ,... ,a*Lj,n-1 ;hA~*L),( a*Uj,0,< k
, ) ; ,
, *U *U
1 -
*U , 1
, jn A~k >
j ...a h
a
the fuzzy interpolated result
B~∗ isrepresented by
( , , ..., *L ; *L),1
*L 1
*L
0 b bn hB~k
b −
< (b0*U ,b1*U, ...,b*Un−1; ,
)
*U >
B~k
h
1 ≤ k ≤ t, 1 ≤ j ≤ m, t denotes the number of fuzzy rules and m denotes the number of antecedent variables of the fuzzy rules. Based on the multiple fuzzy rules interpolation scheme using polygonal interval type-2 fuzzy sets, the proposed method for fuzzy rule interpolation is now presented as follows:
Step 1: Choose p closest fuzzy rules with respect to the observation for fuzzy rule interpolation, where each antecedent fuzzy set
A~kj,
of the closest fuzzy rule Rule k is either the left nearest fuzzy set or the right nearest fuzzy set of the observation fuzzy set
A~∗j, 1 ≤ j ≤ m and 1 ≤ k ≤ p.
Step 2: Assume that Rule 1, Rule 2, …, and Rule p are the p closest fuzzy rules obtained in Step 1, then based on Eq. (2), calculate the representative values
(A~k, j)ep
R
and
Rep(A~∗j)of
j
Ak
~
,
and
A~∗j, respectively, where 1 ≤ k ≤ p and 1 ≤ j ≤ m.
Step 3: Calculate the weight W
kof the fuzzy rule Rule k, where 1 ≤ k ≤ p. Assume that
A~lj j,
and
A~rj j,
are the left nearest antecedent fuzzy set and the right nearest antecedent fuzzy set with respect to the observation fuzzy set
A~∗j, respectively, where 1 ≤ l
j≤ p, 1 ≤ r
j≤ p and 1 ≤ j ≤ m, then let
⎪⎪
⎪
⎩
⎪⎪
⎪
⎨
⎧
≤
≤
<
≤
≤
−
− −
=
∗
∗
∗
, 1 where ), ( ) ( if 1,
), ( ) ( ) ( if
), ( ) (
) ( ) 1 (
,
, ,
, ,
,
,
p k A~
ep R A~ ep R
A~ ep R A~ ep R A~ ep R
A~ ep R A~ ep R
A~ ep R A~ ep R
j j
k
j r j
j l
j l j r
j l j
j l
j j
j j
j
λj
(4)
⎪⎪
⎪
⎩
⎪⎪
⎪
⎨
⎧
≤
≤
<
≤
≤
−
− −
=
∗
∗
∗
, 1 where ), ( ) ( if 1,
), ( ) ( ) ( if
), ( ) (
) ( ) 1 (
,
, ,
, ,
,
,
p k A~
ep R A~ ep R
A~ ep R A~ ep R A~ ep R
A~ ep R A~ ep R
A~ ep R A~ ep R
j k j
j r j
j l
j l j r
j j
r
j r
j j
j j
j
λj
(5)
where 1 ≤ j ≤ m. Let
, min min
1 , 2 1 2, , 1
∑
= == p=
k
j m k ..., , , j
j m k ..., , j
Wk
λ
λ (6)
…
where W
kdenotes the weight of the fuzzy rule Rule k, 0 ≤ W
k≤
1,
11
∑
== p
k
Wk
and 1 ≤ k ≤ p. For each antecedent fuzzy set
A~kj ,of the closest fuzzy rule Rule k, we can see that 0 ≤ λ
k ,j≤ 1 and
0 ≤
kjm ..., ,
j ,
2, 1min
λ
=
≤ 1, where 1 ≤ k ≤ p and 1 ≤ j ≤ m. Therefore, we can see that
11
∑
== p
k
Wk
.
Step 4: Construct an intermediate interval type-2 fuzzy set
B~′ , where B~′ = ( , ,..., , ,..., L , L1 ; L),L 2 L 1L
0L b bl br bn bn hB~
b′ ′ ′ ′ ′− ′− ′
<
>
′
′
′
′
′
′ , ,..., , ,..., − , − ; ′ )
( U U
1 U
2 U U U 1 U
0 b bl br bn bn hB~
b
, where
∑
=×
′ =
p
k
i, k k
i W b
b
1 L
L
, (7)
∑
=×
′ =
p
k
i, k k
i W b
b
1 U
U
, (8)
1
L
L W h ,
h
p
k
B~ B~ k
∑
k=
′ = ×
(9)
1
U
U W h ,
h
p
k
B~ B~ k
∑
k′ = = ×
(10) where 0 ≤ W
k≤ 1,
11
∑
== p
k
Wk
and 1 ≤ k ≤ p.
Step 5: Calculate the average of the fuzziness
“Average_Fuzziness(
A~1∗, A~2∗, …, A~m∗ )” of the observationfuzzy sets
A~1∗,
A~2∗, … and
A~m∗and calculate the average of the fuzziness “Average_Fuzziness(
A~k,1, A~k,2
, …, A~k,m
)” of
the antecedent fuzzy sets
A~k,1,
A~k,2, … and
A~k,mof the fuzz rule Rule k, where
) , ) (
...
(
1 2
1
∑
=
∗ ∗
∗
∗ =
m
j
j
m m
A~ Fuzziness A~
, , A~ , A~ zziness
Average_Fu
(11)
), ) (
..., (
1 2
1
∑
=
=
m
j
j , k m
, k , k ,
k m
A~ Fuzziness A~
, A~ , A~ Fuzziness _
Average
(12)
and 1 ≤ k ≤ p. Calculate the ratio RF of the average of the fuzziness of the observation fuzzy sets to the weighted average fuzziness of the antecedent fuzzy sets of the p closest fuzzy rules, shown as follows:
, ) ..., , , (
) ..., , , (
1
2 1 2 1
∑
=∗
∗
∗
×
= p
k
m , k , k , k k
m
A~ A~ A~ Fuzziness _
Average W
A~ A~ A~ Fuzziness _
Average
RF
(13)
where RF ≥ 0, 0 ≤ W
k≤ 1,
11
∑
== p
k
Wk
and 1 ≤ k ≤ p.
Step 6: Get the fuzzy interpolated result
B~∗, ∗ B~=
..., , , ..., , , ( ), ; , ..., , , ..., , ,
( 0L 1L L L L2 L1 L 0U 1U U *U
* r
* l
* B~
*n
*n
*r
*l
*
* b b b b b h b b b b
b − − *
<
, )
;
, U U
1 U
2 − >
− * B~* n
*
n b h
b
where the values of the characteristic points
b0*L ,b1*L ,...,bl*L ,b*rL ,..., b*n−L2and
b*nL−1are calculated as follows:
cL
b′
=
2L
L r
l b
b′ + ′
, (14)
∗L
bl
=
2
L
L rL l
c
b RF b
b ′ − ′
×
′ −
, (15)
∗L
br
=
2
L
L rL l
c
b RF b
b ′ − ′
×
′ +
, (16)
⎪⎪
⎪
⎩
⎪⎪
⎪
⎨
⎧
−
≤
≤
′ +
′ −
× +
−
≤
′ ≤
′ −
×
−
=
∑
∑
−
=
+
−
=
+
, 1 1 if ,) (
, 1 0 if ,) (
1
L L
1 L
1
L L
1 L
L
n i r b b RF b
l i b
b RF b
b
i
r t
t t
* r
l
i t
t t
* l
i*
(17)
where 0 ≤ i ≤ n – 1; the values of
U U U U2 U 10 , * ,..., l* , *r ,..., *n
* b b b b
b −
and
b*nU−1are calculated as follows:
cU
b′
=
2U
U r
l b
b′ + ′
, (18)
∗U
bl
=
2
U
U lU r
c
b RF b
b′ − × ′ − ′
, (19)
∗U
br
=
2
U
U lU r
c
b RF b
b ′ − ′
×
′ +
, (20)
⎪⎪
⎪
⎩
⎪⎪
⎪
⎨
⎧
−
≤
≤
′ +
′ −
× +
−
≤
′ ≤
′ −
×
−
=
∑
∑
−
=
∗ +
−
=
∗ +
∗
, 1 1 if ,) (
, 1 0 if ,) (
1
U U1 U
1
U U
1 U
U
n i r b
b RF b
l i b
b RF b
b
i
r t
t t r
l
i t
t t l
i
(21)
where 0 ≤ i ≤ n – 1; and the values of
hB~*Land
hB~*Uare calculated as follows:
∑
=×
=
p
k
B~ B~ k
k
* W h
h
1
L
L
, (22)
∑
=×
=
p
k
B~ B~ k
* W h k
h
1
U
U
, (23) where 0 ≤ W
k≤ 1, 1
1
∑ =
= p
k
Wk
and 1 ≤ k ≤ p. Therefore, we can get the fuzzy interpolated result
B~∗,where
B~∗ =), ; , ..., , , ..., , ,
( L L
L 1 L 2 L 1L
0L * B~*
* n
* n
* r
* l
* b b b b b h
b − −
< (b0*U ,b1*U ,...,bl*U ,b*rU,
,
..., b*n−U2 −U; U)>
1 B~*
*
n h
b
.
Because each observation fuzzy set
A~∗jhas at least one
nearest neighboring antecedent fuzzy set and has at most two
nearest neighboring antecedent fuzzy sets, where 0 ≤ j ≤ m,
we can see that 1 ≤ p ≤ 2
m, where p denotes the number of closest fuzzy rules with respect to the observation.
Furthermore, the proposed fuzzy rule interpolation method also can guarantee the convexity of the fuzzy interpolated result.
Property 3.1: If the consequence interval type-2 fuzzy sets of the closest fuzzy rules with respect to the observation are all convex interval type-2 fuzzy sets, then the fuzzy interpolated result
B~∗of the proposed fuzzy rule interpolation method is also a convex interval type-2 fuzzy set.
IV. E
XPERIMENTALR
ESULTSIn this section, we use some examples to compare the fuzzy interpolated results of the proposed fuzzy rule interpolation method with the results by using the methods presented in [4]
and [13].
Example 4.1: Let us consider the following fuzzy rule interpolation scheme using polygonal interval type-2 fuzzy sets shown in Fig. 3:
Rule 1: If X is
A~1Then Y is
B~1, Rule 2: If X is
A~2Then Y is
B~2, Observation: X is
A~∗Conclusion: Y is
B~∗Fig. 3 shows a comparison of the fuzzy interpolated fuzzy sets of Example 4.1 for different methods. From Fig. 3, we can see that Lee and Chen’s method [13] and the proposed method generated a convex polygonal interval type-2 fuzzy set, whereas Chang and Chen’s method [4] generated a nonconvex polygonal interval type-2 fuzzy set. We also can see the fuzziness of the fuzzy interpolated result
B~∗of the proposed method is smaller than the fuzziness of the consequence interval type-2 fuzzy set
B~1 (i.e., (B~∗)Fuzziness
<
Fuzziness(B~1),whereas the fuzziness of the fuzzy interpolated result
B~∗by Lee and Chen’s method [13] is larger than the fuzziness of the consequence interval type-2 fuzzy set
B~1 (i.e., ( ) (B~1)).Fuzziness B~
Fuzziness ∗ >
Because the fuzziness of the observation
A~∗is smaller than the fuzziness
of the antecedent interval type-2 fuzzy set
A~1(i.e.,
)),( )
( A~1
Fuzziness A~
Fuzziness ∗ <
we can see that the proposed method gets a more reasonable result than Chang and Chen’s method [4] and Lee and Chen’s method [13].
Example 4.2: Let us consider the following fuzzy rules interpolation scheme with two cases of observations shown in Fig. 4 and Fig. 5, respectively:
Rule 1: If X is
A~1Then Y is
B~1, Rule 2: If X is
A~2Then Y is
B~2, Observation: X is
A~∗Conclusion: Y is
B~∗A~1
A~2
A*
~
[4]
Method s Chen' and Chang
B~1
B~2
B~*
[13]
Method s Chen' and Lee
B~1
B~2
B~*
Method Proposed The
B~1
B~2
B~*
Fig. 3. A comparison of the fuzzy interpolated results of Example 4.1 for different methods.
Fig. 4 shows a comparison of the fuzzy interpolated results of Example 4.2 for different methods with respect to the observation
A~∗= <(7.5, 7.5, 9.5, 9.5; 0.875), (7, 7, 10, 10;
1)>. From Fig. 4, we can see that Lee and Chen’s method [13]
and the proposed method generated a trapezoidal interval type-2 fuzz sets, whereas Chang and Chen’s method [4]
generated a polygonal interval type-2 fuzzy set. By comparing the shapes of the membership functions of the fuzzy interpolative reasoning results, we can see that Lee and Chen’s method [13] and the proposed method get more reasonable results than Chang and Chen’s method [4]. Fig. 5 shows a comparison of fuzzy interpolated results of Example 4.2 for different methods with respect to the observation
A~∗= <(8, 8, 9, 9; 0.75), (7, 8, 9, 10; 1)>. From Fig. 5, we can see that Chang and Chen’s method [4], Lee and Chen’s method [13] and the proposed method generated a trapezoidal interval type-2 fuzzy set. We also can see that the fuzziness of the fuzzy interpolated results
B~∗ by Chang and Chen’s method[4] and the proposed method are smaller than the fuzziness of the consequence interval type-2 fuzzy sets
B~1and
B~2, whereas the fuzziness of the fuzzy interpolated result
B~∗ byLee and Chen’s method [13] is larger than the fuzziness of the consequence interval type-2 fuzzy sets
B~1and
B~2. Because the fuzziness of the observation
A~∗ is smaller than thefuzziness of the antecedent interval type-2 fuzzy sets
A~1and
A2
~
, we can see that the proposed method gets a more reasonable result than Lee and Chen’s method [13]. From Fig.
4 and Fig. 5, we can see that the proposed method generated
two different fuzzy interpolated results with respect to the two
different observations, whereas Lee and Chen’s method [13]
generated the same fuzzy interpolated result with respect to the two different observations. Therefore, we can see that the proposed method gets a more reasonable result than Chang and Chen’s method [4] and Lee and Chen’s method [13].
A~1
A~2
A~*
[4]
Method s Chen' and Chang
B~1
B~2
B~*
[13]
Method s Chen' and Lee
B~1
B~2
B~*
Method Proposed The
B~1
B~2
B~*
Fig. 4. A comparison of the fuzzy interpolated results of Example 4.2 with the observation A~∗
= <(7.5, 7.5, 9.5, 9.5; 0.875), (7, 7, 10, 10; 1)>
for different methods.
A~1
A~2
A*
~
[4]
Method s Chen' and Chang
B~1
B~2
B~*
[13]
Method s Chen' and Lee
B~1
B~2
B~*
Method Proposed The
B~1
B~2
B~*
Fig. 5. A comparison of the fuzzy interpolated results of Example 4.2 with the observation A~∗ = <(8, 8, 9, 9; 0.75), (7, 8, 9, 10; 1)>
for different methods
.
V. C
ONCLUSIONIn this paper, we have presented a method for fuzzy rule interpolation based on the ratio of fuzziness of interval type-2 fuzzy sets. It can deal with fuzzy rule interpolation with polygonal interval type-2 fuzzy sets and can guarantee the convexity of the fuzzy interpolated result. Moreover, it can produce different fuzzy interpolated results with respect to different observations. First, it calculates the weights of the closest fuzzy rules with respect to the observation to obtain an intermediate consequence fuzzy set. Then, it uses the ratio of fuzziness of interval type-2 fuzzy sets to infer the fuzzy interpolated result based on the intermediate consequence fuzzy set. The experimental results show that the proposed fuzzy rule interpolation method gets more reasonable results than Chang and Chen’s methods [4] and Lee and Chen’s method [13].
A
CKNOWLEDGMENTThis work was supported in part by the National Science Council, Republic of China, under Grant NSC 97-2221-E-011-107-MY3.
R
EFERENCES[1] P. Baranyi, L. T. Koczy, and T. D. Gedeon, “A generalized concept for fuzzy rule interpolation,” IEEE Trans. Fuzzy Syst., vol. 12, no. 6, pp.
820-832, 2004.
[2] Y. C. Chang, S. M. Chen, and C. J. Liau, “Fuzzy interpolative reasoning for sparse fuzzy rule-based systems based on the areas of fuzzy sets,” IEEE Trans. Fuzzy Syst., vol. 16, no. 5, pp. 1285-1301, 2008.
[3] Y. C. Chang and S. M. Chen, “A new method for multiple fuzzy rules interpolation with weighted antecedent variables,” in Proc. 2008 IEEE Int. Conf. Systems, Man and Cybernetics, Singapore, 2008, pp. 76-81.
[4] Y. C. Chang and S. M. Chen, “A new fuzzy interpolative reasoning method based on interval type-2 fuzzy sets,” in Proc. 2008 IEEE Int.
Conf. Systems, Man and Cybernetics, Singapore, 2008, pp. 82-87.
[5] S. M. Chen and Y. K. Ko, “Fuzzy interpolative reasoning for sparse fuzzy-rule-based systems based on cutting and transformation techniques,” IEEE Trans. Fuzzy Syst., vol. 16, no. 6, pp. 1626-1648, 2008.
[6] S. M. Chen, Y. K. Ko, Y. C. Chang, and J. S. Pan, “Weighted fuzzy interpolative reasoning y interpolative reasoning based on weighted incremental transformation and weighted ratio transformation techniques,” IEEE Trans. Fuzzy Syst., vol. 17, no. 6, pp. 1412-1427, 2009.
[7] Z. H. Huang and Q. Shen, “Fuzzy interpolative reasoning via scale and move transformations,” IEEE Trans. Fuzzy Syst., vol. 14, no. 2, pp.
340-359, 2006.
[8] Z. H. Huang and Q. Shen, “Fuzzy interpolation and extrapolation: A practical approach,” IEEE Trans. Fuzzy Syst., vol. 16, no. 1, pp. 13-28, 2008.
[9] Z. H. Huang and Q. Shen, “Preserving piece-wise linearity in fuzzy interpolation,” in Proc. 2009 IEEE International Conference on Fuzzy Systems, Korea, 2009, pp. 575-580.
[10] C. F. Juang and Y. W. Tsao, “A self-evolving interval type-2 fuzzy neural network with online structure and parameter learning,” IEEE Trans. Fuzzy Syst., vol. 16, no. 6, pp. 1411-1424, 2010.
[11] L. T. Koczy and K. Hirota, “Approximate reasoning by linear rule interpolation and approximation,” Int. J. Approx. Reasoning, vol. 9, no.
3, pp. 197-225, 1993.
[12] L. W. Lee and S. M. Chen, “Fuzzy interpolative reasoning for sparse fuzzy rule-based systems based on the ranking values of fuzzy sets,”
Expert Systems with Applications, vol. 35, no. 3, pp. 850-864, 2008.
[13] L. W. Lee and S. M. Chen, “Fuzzy interpolative reasoning using interval type-2 fuzzy sets,” in Proceedings of the Twenty First International Conference on Industrial, Engineering & Other
Applications of Applied Intelligent Systems, Wroclaw, Poland, 2008, pp. 92-101.
[14] Q. Liang and J. M. Mendel, “Interval type-2 fuzzy logic systems,”
IEEE Trans. Fuzzy Syst., vol. 8, no. 5, pp. 535-550, 2000.
[15] J. M. Mendel and R. I. John, “Type-2 fuzzy sets made simple,” IEEE Trans. Fuzzy Syst., vol. 10, no. 2, pp. 117-127, 2002.
[16] J. M. Mendel, R. I. John, and F. L. Liu, “Interval type-2 fuzzy logic systems made simple,” IEEE Trans. Fuzzy Syst., vol. 14, no. 6, pp.
808-821, 2006.
[17] D. Tikk and P. Baranyi, “Comprehensive analysis of a new fuzzy rule interpolation method,” IEEE Trans. Fuzzy Syst., vol. 8, no. 3, pp.
281-296, 2000.
[18] K. W. Wong, D. Tikk, T. D. Gedeon, and L. T. Koczy, “Fuzzy rule interpolation for multidimensional input spaces with applications: A
case study,” IEEE Trans. Fuzzy Syst., vol. 13, no. 6, pp. 809-819, 2005.
[19] Y. Yam, P. Baranyi, D. Tikk, and L. T. Koczy, “Eliminating the abnormality problem of alpha-cut based fuzzy interpolation,” in Proc.
8th Int. Fuzzy Systems Association World Congress (IFSA’99), Taipei, Taiwan, 1999, pp. 762-766.
[20] Y. Yam and L. T. Koczy, “Representing membership functions as points in high-dimensional spaces for fuzzy interpolation and exptrapolation,” IEEE Trans. Fuzzy Syst., vol. 8, no. 6, pp. 761-772, 2000.
[21] Y. Yam, M. L. Wong, and P. Baranyi, “Interpolation with function space representation of membership functions,” IEEE Trans. Fuzzy Syst., vol. 14, no. 3, pp. 398-411, 2006.
[22] L. Yang and Q. Shen, “Towards adaptive interpolative reasoning,” in Proc. 2009 IEEE International Conference on Fuzzy Systems, Korea, 2009, pp. 542-549.
[23] L. A. Zadeh, “Fuzzy sets,” Information and Control, vol. 8, pp.
338-353, 1965.