行政院國家科學委員會補助專題研究計畫
行政院國家科學委員會補助專題研究計畫
行政院國家科學委員會補助專題研究計畫
行政院國家科學委員會補助專題研究計畫
□
□
□
□
成
成 果
成
成
果
果
果 報
報
報
報 告
告
告
告
■
■
■
■期中進度報告
期中進度報告
期中進度報告
期中進度報告
水下載具應用於海底管線檢修之關鍵技術研發--水面工作載
台動態定位之推進器及驅動控制系統設計與實現
計畫類別:□ 個別型計畫 ■ 整合型計畫
計畫編號:
NSC 97-2221-E-006-268-MY2
執行期間:2008 年 08 月 01 日至 2009 年 07 月 31 日
計畫主持人:謝旻甫
計畫參與人員:陳政宏、陳紀均、林易賢、陳泊翰、賴康裕、余守龍
成果報告類型(依經費核定清單規定繳交):■精簡報告 □完整報告
本成果報告包括以下應繳交之附件:
□赴國外出差或研習心得報告一份
□赴大陸地區出差或研習心得報告一份
□出席國際學術會議心得報告及發表之論文各一份
□國際合作研究計畫國外研究報告書一份
處理方式:除產學合作研究計畫、提升產業技術及人才培育研究計畫、
列管計畫及下列情形者外,得立即公開查詢
□涉及專利或其他智慧財產權,□一年□二年後可公開查詢
執行單位:國立成功大學系統及船舶機電工程學系
中 華 民 國 98 年 05 月 26 日
行政院國家科學委員會專題
行政院國家科學委員會專題
行政院國家科學委員會專題
行政院國家科學委員會專題研究計畫成果報告
研究計畫成果報告
研究計畫成果報告
研究計畫成果報告
水下載具應用於海底管線檢修之關鍵技術研發—
水面工作載台動態定位之推進器及驅動控制系統設計與實現
Design and Realization of Thrusters and the Driving Control System for
Dynamic Positioning of the Surface Supported Vessel
計畫編號:NSC 97-2221-E-006-268-MY2
執行期限:97 年 8 月 1 日至 98 年 7 月 31 日
主持人:謝旻甫
國立成功大學系統及船舶機電工程學系
計畫參與人員:
陳政宏、陳紀均、林易賢、陳泊翰、賴康裕、余守龍
一
一
一
一、
、
、中文摘要
、
中文摘要
中文摘要
中文摘要
本計畫配合總計畫「水下載具應用於海底管線 檢修之關鍵技術研發」之總體目標,在應用自行研 發之遙控載具進行檢測作業之需求下,達成其水面 工作載台動態定位之目的。動態定位能力,取決於 定位平台的模型、推進器之性能與配置、控制系統 之響應能力與強健度等因素。故本計畫著重以下幾 點:(1)開發高自主性、模組化、可攜式以及低成 本的高性能推進器及其設計方法;(2)以創新製程 與設計技術,解決永磁馬達大型化所造成的製作組 裝問題,並針對本計畫之推進器進行開發; (3)以 網路式架構進行自主性推進器之協調與控制,並確 保平台與推進器達成匹配;(4)實現完整之水面工 作平台動態定位系統。 關鍵字:動態定位;推進器;永磁馬達;後充磁Abstract
This project aims to develop powerful propulsors for dynamic positioning system of a surface vessel, which works with the self-developed ROV to explore, inspect and repair the piping on the seabed. The ability of a dynamic positioning system relies heavily on modeling of the vessel and the disturbances, the thruster capacity and allocation, response and robustness of the controller design, etc. Therefore, this project is dedicated to the following research topics: (1) development of indigenous thrusters as well as the design methodology, (2) to solve the manufacturing problem of large permanent-magnet motors by means of new design method and manufacturing processes, (3) network construction for control of thrusters and to ensure the thrusters match the vessel, (4) to construct and complete the dynamic positioning control system. Keyword: dynamic positioning, permanent-magnet motor, thruster, post-assembly magnetization
二
二
二
二、
、
、前言
、
前言
前言
前言
本計劃在研究團隊具備有遙控水下載具研發 能力的基礎下,擬發展 ROV 輔助進行海底管線追 蹤與檢測的方法。在水下作業部分,關鍵技術在於 ROV 之定位精確度、路徑追循能力以及機械手臂 之作業性能;在水面作業部分,主要需求為水面工 作船之動態定位能力。本計畫主要針對動態定位系 統作為本研究之重點,透過高功率大推力之大型推 進器開發,結合驅動技術與網路式控制系統,達成 水面工作平台之精確動態定位。動態定位平台所使 用之推進器,須具備高推力(馬達則需高扭矩),以 達成動態定位上高響應之控制需求。而高性能、高 功率馬達磁鐵之強力磁性,易造成製作過程組裝上 的困難。故本計畫採用後充磁之設計法,解決馬達 大型化之組裝問題。 本年度已完整設計出一環驅式推進器,建立後 充磁馬達之創新設計流程,結合葉片分析與後充磁 限制,並透過有限元素軟體驗證分析。延續上一年 所得之設計結果,製作推進器一組,以供目標工作 載台動態定位推力之所需。目前正進行加工當中, 預期六月可完成。後續規劃先以動力測試平台測量 其特性及性能,接下來則實際應用於動態定位平台 作為其推進器。此外,本年度支另一重要工作項目 為小型動態定位平台控制實現,目前已經完成所有 硬體組裝,並已於台南安平完成第一次水上實測, 預計七月可完成動態定位整合測試。三
三
三
三、
、
、相關研究與文獻
、
相關研究與文獻
相關研究與文獻
相關研究與文獻
本計畫利用後充磁作為解決永磁電動機大型 化組裝困難之問題,並有效節省製造成本[1-2]。一 般常見的後充磁法為利用充磁軛(Yoke)針對轉子 進行充磁[3],再將轉子置入定子組裝成馬達,此 法雖已簡化作業,但尚需組裝具磁性之轉子,故多 用於磁力較弱之 Ferrite 磁鐵。另一種方式為裝配 充磁法[4],此法組裝後利用定子線圈作為充磁軛 以將磁鐵充磁,因此馬達必須完全組裝完成,方進行充磁,因此過程中不涉及任何磁性物質之處理。 該方法組裝容易,組裝成本低,亦無附著鐵粉等問 題,可克服大功率馬達轉子強大磁力所造成之問 題。本計劃採用裝配充磁法,期能藉此發展應用於 推進器馬達之後充磁組裝與設計方法。 動態定位系統之控制系統根據環境外力因素 以及位置量測計算出的船舶所在位置,並決定適合 的推力大小與合力方向,使船舶能保持在目標位置 上。文獻[5]中推導出最佳控制的方法,以調整推 進器的推力與方向,達到動態定位的目的。其中使 用五個全向式螺槳,利用演算法求得各方向的合力 以及合力矩方程式之最佳解。文獻[6] 探討最佳控 制即時計算,整合於船舶的操縱系統,利用移動域 控制,進行船舶的路徑追蹤。其三個螺槳中之兩主 推進器放在船艉,一側推進器置於船艏,相較於五 個推進器的配置方式,可以大幅降低成本以及安裝 困難度。文獻[7]使用模糊邏輯控制器,調整舵角、 主推進器、側推進器,對船舶進行動態定位。過程 中利用船舶運動狀態去計算出控制器的輸入值,藉 由模糊規則產生控制器輸出,以調整船舶的位置與 姿態。文獻[8]為改善動態定位系統,將環境因素 造成的干擾進行補償以設計估測器,以及在 PID 控制器當中附上加速度項進行低速追蹤控制。文獻 [9]利用軟體繪製極化圖,來估測環境的外力,以 便計算螺槳所需推力。文中比較使用 Azimuth 螺槳 與隧道型螺槳,其結果發現使用 Azimuth 螺槳可以 得到較好的效果。此研究有利於選擇及配置推進 器,運用於船舶動態定位系統的設計。
四
四
四
四、
、
、研究方法與成果
、
研究方法與成果
研究方法與成果
研究方法與成果
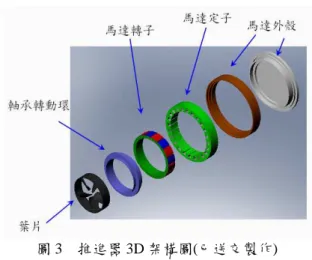
4.1 葉片與推葉片與推葉片與推葉片與推進器設計理論與方法進器設計理論與方法進器設計理論與方法進器設計理論與方法 一般船舶的推力來源,即藉由推進器之葉片旋 轉產生,然而若葉片設計不佳則會影響推力大小。 因此,本計劃以理論設計中之升力線理論作為初步 設計之工具[10],設計適合用於環驅式推進器之葉 片,並且配合 STAR-CD 及 MIT-PLL 等流場模擬 軟 體 進 行 分 析 與 設 計 , 在 葉 片 輸 入 轉 矩 達 12N-m@2000rpm 時,使推進器推力可達到 266N。 4.2 後後後後充磁環驅式推進器之設計充磁環驅式推進器之設計充磁環驅式推進器之設計充磁環驅式推進器之設計與製作與製作與製作與製作 (1)推進器額定數據: 葉片設計完成後,馬達額定輸出規格(12N-m@2000 rpm)也大致底定。在考量推進器之輸入電功率較 高,為了減少電流值以降低銅損與銅線成本,因此 選用輸入電壓為 310V。 (2)推進器馬達槽極配之選用: 後充磁式推進器馬達之槽極配選用上,第一點必須 符合槽極比為 1.5 之倍數,第二點要確認能夠達到 三相平衡的繞組,本計畫經由初步分析結果並配合 後充磁限制,決定採用 16 極 24 槽之槽極配。 (3)繞組設計: 本計劃依據[11]所提出之繞線法則,並將其設計方 法利用 MATLAB 語言撰寫該繞組設計程式,自動 計算繞組的各項參數,可得繞線結果如表 1 及圖 1 所示。 表 1 繞線結果 槽號(參考圖 1) In 1 4 7 10 13 16 19 22 Out 2 5 8 16 14 17 20 23 圖 1 繞線結果圖 (4)磁路設計與模擬: 馬達基本規格決定後,便可依此基本條件進行磁 路設計與分析,並進一步決定定子細部尺寸及電氣 特性等。馬達的磁路設計包括磁鐵尺寸、等效磁路 分析及定子細部尺寸。本研究利用等效磁路來設計 馬達尺寸後,最後再利用有限元素電磁軟體去模擬 並做小部分修改。本文根據前一年所提出之後充磁 設計方法以及推進器設計結果,在本年度製作時, 基於實務考量加以數次修正,以得最佳化設計結 果、符合現況需求,並完成推進器機構設計。設計 結果整理成如表2所示,其電磁模擬(Maxwell EM [12])結果則如圖2所示,其單相反電動勢常數峰值 為1.49 V·s/rad.,而理論反電動勢常數峰值為1.437 V·s/rad.,誤差為3.7%,模擬與設計相當吻合。最 後整體組裝圖如圖3所示,目前已送交廠商加工, 預計六月下旬完成製作組裝,並於七月完成測試。 表2 馬達設計之規格 馬達參數 數值與單位 額定輸出轉矩 12 N-m 額定輸出轉速 2000 rpm 輸入電壓 310 V 槽極配 24槽16極 定子外徑 247 mm 轉子外徑 190 mm 匝數 16 turn/coil 佔槽率 34.7 % 圖 2 單相反電動勢常數波形圖 3 推進器 3D 架構圖(已送交製作) 4.3 動態定位平台實驗動態定位平台實驗動態定位平台實驗動態定位平台實驗 現階段實驗所用動態定位平台為現有之 FRP 船模,加上兩組主推進器,以及一側推進器,主推 進器除提供船體推進動力外,亦提供左右 90 度轉 向調整,故可達成前後左右轉向,平時維持其 0 度角的位置作為前後修正,而側向之修正則依靠船 艏側端之側推進器(僅作側向修正而不提供轉向功 能)。該動態定位平台如圖 4 及圖 5 所示。 圖 4 動態定位平台 圖 5 本實驗平台之螺槳配置 4.3.1 系統架構系統架構系統架構系統架構 動態定位平台之電力設備,主要為提供推進器 馬達驅動器所需之電源 48V,因此目前採用四組 12V 之鉛酸電池,其他電源可配合相關之電壓轉換 器以提供不同電壓準位於推進設備、定位感測設 備、控制器等。動態定位動作主要經由位置與航向 定位後以推進器進行修正,位置偵測上使用高精度 之 DGPS 作定位量測,而航向定位則使用電羅經, 可判讀南北極方位。所有控制命令皆透過中央控制 器進行即時位置、航向偵測與計算後,並將推進命 令送至三組推進器以修正平台位置,達成動態定 位,該控制器為 NI Compact RIO (cRIO),其主要 為分散式 IO 之嵌入式系統。 4.3.2 推進器推進器推進器推進器 動態定位平台所利用的主推進器為 Azimuth 推進器,該推進器已被廣泛使用,並證實其效果十 分良好。本計畫此階段為初步小型化測試與驗證, 基於經濟效益之考量,以現有推進器達成類似 Azimuth 推進器之控制實現。 推進器馬達特性曲線配合螺槳特性曲線可檢 驗推進器與動態定位平台之匹配性,兩者匹配性可 分別透過實驗平台之推力與船速如圖 6 所示,其中 縱移特性經回歸後可得(1)式: 2 - 0.686 -14.7 F = ⋅ v ⋅v (1) 其中 F 為推力(N), v 為船速(m/s)。橫移特性 同樣經量測後回歸可得(2)式: 2 68.6 81.34 F = ⋅v + ⋅v (2) 而馬達與推進器匹配本計畫進行推進器馬達 之特性量測以及螺槳負載實驗,其中馬達特性經回 歸後如圖 7 所示,可得下式曲線: - 0.1263 33.782 T = × N + (3) 其中 T 為轉矩(Nm), N 為轉速(rad/s)。推進 器負載特性則為沉水式推進器主體在不同速度下 的穩態負載,經量測後回歸可得二次曲線如下式: 2 0.0003 - 0.0018 T = ×N ×N (4) 如圖 7 所示,可發現馬達與推進器負載交於轉 速為 180 rad/s,轉矩為 10Nm 之操作點。推進器馬 達之命令與轉速之關係同樣經量測後可回歸得(5) 式: 2 24.43 -38.96 7.9832 N = ⋅V ⋅V + (5) 其中 V 為命令電壓(V), N 為轉速(rad/s),其關係 如圖 8 所示。 推力對船速圖 y = -68.6x2 + 81.34x + 7E-15 y = 686x2 - 14.7x + 6E-14 0 20 40 60 80 100 120 0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 船速 (m/s) 推 力 ( N ) 縱移推力 橫移推力 圖 6 船速與推力圖 負載操作點 0 5 10 15 20 25 30 35 40 0 50 100 150 200 250 轉速(rad/s) 轉 矩 (N m ) 負載 馬達 For ω=180 rad/s , T=10Nm 虛線為估算之 不同速度下的 負載線 穩態操作線 圖 7 馬達與推進器負載匹配圖 主推進器 側推進器 船體 電器設備
命令對轉速圖 y = 24.43x2 - 38.96x + 7.9832 15 20 25 30 35 40 45 1.8 1.85 1.9 1.95 2 2.05 2.1 2.15 2.2 2.25 命令電壓(V) 轉 速 (r ad /s ) 圖 8 推進器命令對轉速圖 動態定位之動力源為推進器,當命令輸入推進 器後,將產生轉速,進一步可得到當時馬達的轉 矩,由上述實驗結果未來加上螺槳特性線後,透過 螺槳特性可得知該轉矩所對應之推力,藉由平台所 產生的推力與速度關係,將可了解輸入命令對於平 台所產生的推力與速度,此關係有助於動態定位架 構上控制法則的實現。 4.3.3 方位感測器與控制器方位感測器與控制器方位感測器與控制器方位感測器與控制器 船體偏移量透過感測器 (電羅經、 DGPS) 取 回,再經由控制器搭配計算後可得之船體之姿態及 偏移量,再透過控制策略將其修正至原位置。 電羅經是用來指引平台航向姿態,具自動方位 補償校正功能(船頭向右或向左繞圈 360 度,至少 繞 兩 圈 並 放 慢 船 速 ) 。 本 實 驗 所 使 用 的 KVH Azimuth 1000 電羅經,其精度為±5°,電力需求為 電壓 12V。資料輸出介面為 RS-232,格式如下: $HCHDM,153.9,M*27 其中的 153.9°為目前的磁偏角,需將電羅經再做逆 時針 25°修正。 DGPS 具多頻道衛星定位接收儀,具 Beacon 接收能力及衛星差分(L-BAND)及 WAAS 接收功 能,差分定位(DGPS)靜態水平精度 1 公尺以內。 本實驗所用的 DGPS 設備,本身具備 RTCM SC-104 輸入及 NMEA0183 輸出格式,傳輸介面則使用 RS232,本計畫所使用到的格式說明如下: $GPRMC,<1>,<2>,<3>,<4>,<5>,<6>,<7>,<8>,<9>, <10>,<11>,<12>*hh<CR><LF> <3> 緯度 ddmm.mmmm(度分)格式(前面的 0 也將被傳輸) <4> 緯度半球 N(北半球)或 S(南半球) <5> 經度 dddmm.mmmm(度分)格式(前面的 0 也將被傳輸) <6> 經度半球 E(東經)或 W(西經) <7> 地面速率(000.0~999.9 節,前面的 0 也將被 傳輸) 控制器方面,本實驗使用 NI cRIO 嵌入式系 統,能穩定地執行 LabView 程式,以應用於即時 控制、分析、資料記錄。實驗時,透過控制器來接 收與記錄電羅經、DGPS 以及命令等數據,並且將 命令傳達至驅動器,以控制推進器。 4.3.4 電力系統電力系統電力系統電力系統 本實驗使用之電源為鉛酸電池(俗稱電瓶),可 於放電後再行充電後再使用。小型動態定位平台上 裝有四顆 12V 的 100Ah 鉛酸電池,提供推進器 48V 之電源。另外有兩個 24V 電池,分別供電給 cRIO 控制器與 DGPS。另外還有一個 12V 電池提供電羅 經電源所需。圖 9 為其電力系統架構。 圖 9 電力系統架構圖 4.3.5 控制器控制器控制器控制器 控制器利用 DGPS 所測得的偏移位置量,以及 電羅經測出的偏移姿態角,去調整比例常數,以達 成船舶的動態定位。 圖 10 為整個動態定位架構的控制方塊圖,其 中控制方程式如下:
(
)
(
)
(
)
(
)
(
)
(
)
( )
1 1 2 3 2 1 2 3 3 4 5 (3) (4) (5) d d d d d i i i c K x x K x K c K x x K x K c K y y K y c t N K n t ψ ψ ψ ψ = ⋅ − + ⋅ + ⋅ − = ⋅ − + ⋅ − ⋅ − = ⋅ − + ⋅ − = ⋅ & & & ) 9 ( ) 8 ( ) 7 ( ) 6 ( 其中c
i為推進器之 Command,n
i為推進器之轉速, iK
為比例係數,N
為延遲時間,x
與y
各為 GPS 的經緯度座標,x
&
與y
&
各為縱移以及橫移方向的速 度,ψ
為平擺角,x
d,
y
d,
ψ
d為欲保持航向,K
i 為比例係數。 圖 10 控制方塊圖 4.4 實驗說明實驗說明實驗說明實驗說明 在動態定位系統控制方面之研究與實驗仍積 極進行整合中。第一次水上實測已於安平運河進 行,藉由此小型實驗平台,對動態定位系統進行初 步整合(包含各項硬體與電路等) 以發現各種潛在 問題,並實際利用 DGPS 以及電羅經進行控制, 以求得回授、命令與推進量之關係。 以圖 11-圖 14 的直線前進與側推修正結果為 Ref Input Ref Input 船 船 cRIO cRIO -(電羅經) 方位 (DGPS) 位置 推進器 推進器 伺服馬達 伺服馬達 + +例,可分析船舶直線前進的性能,由於本實驗船的 兩組主推進器推力大小不同,造成前進時會產生偏 差,因此使用側推進器來進行修正。由於兩主推進 器命令延遲時間不同的緣故,使得船舶方向無法保 持直線。本實測後將修正推進器推力與緩起動延遲 不均的問題,達到直線前進的動作。 從圖 11- 圖 12 可知,DGPS 定位路徑越稀疏 處表示船速越高,反之亦然;而航向角亦可與路徑 做進一步對照。而從圖 13 -圖 14 對照後可得知直 線推進時船速的響應大約為命令輸入 5 秒後,方始 作動,主推進器全開下的船速約為側推進器全開的 兩倍以上,由以上對照方式可整理得實測的命令對 於船速之關係,有助於動態定位上的實現。 本次實驗共進行直線前進、側推修正、最小迴 轉半徑、倒俥等測試,上述測試結果可整理出推進 命令對於船速之關係如表 3-6 所示,由推進命令對 船速之關係可進一步求出兩者間的增益調整量以 做為控制器參考命令。 55.0 0.0 5.0 10.0 15.0 20.0 25.0 30.0 35.0 40.0 45.0 50.0 經度航程 (m) 15.0 0.0 5.0 10.0 DGPS 紀錄路徑結果 圖 11 DGPS 定位路徑變化 400.0 0.0 50.0 100.0 150.0 200.0 250.0 300.0 350.0 時間 (sec) 80.0 0.0 10.0 20.0 30.0 40.0 50.0 60.0 70.0 航向角對時間變化圖 圖 12 航向角變化 3.0 0.0 0.5 1.0 1.5 2.0 2.5 時間 (sec) 80.0 0.0 10.0 20.0 30.0 40.0 50.0 60.0 70.0 航速對時間變化圖 圖 13 船速變化 4.0 -4.0 -3.0 -2.0 -1.0 0.0 1.0 2.0 3.0 時間 (sec) 80.0 0.0 10.0 20.0 30.0 40.0 50.0 60.0 70.0 右舷推進器 側推進器 左舷推進器 推進器命令電壓對時間圖 圖 14 直線前進與側推之推進器命令 圖 15 於安平運河所進行之實測 表 3 前進命令對應船速與響應 左舷推進 器命令(V) 右舷推進 器命令(V) 船速(knot) 響應時間 (sec) 2.5 4 2.8 5 2 2.5 1 5 3.5 3 1.8 5 4 3 1.1 5 3.5 3.5 1.8 5 表 4 倒車命令對應船速與響應 左舷推進 器命令(V) 右舷推進 器命令(V) 船速(knot) 響應時間 (sec) 4 4 1.5 10 緯 度 航 程 (m ) 推 進 器 命 令 電 壓 (V ) 航 速 (k n o t) 航 向 角 ( 度 )
表 5 迴轉命令對應船速與響應 左舷推進 器命令(V) 右舷推進 器命令(V) 船速(knot) 響應時間 (sec) 4 3.5 1 5 4 3 1 5 4 2.8 1.1 5 表 6 側推進命令對應船速與響應 側舷推進器命 令(V) 船速(knot) 響應時間(sec) 4 1.7 6 2.3 1.3 5 0.8 0.5 5
五
五
五
五、
、
、結論與成果進度評估
、
結論與成果進度評估
結論與成果進度評估
結論與成果進度評估
本計畫已成功設計出一環驅式推進器,並利用 後充磁技術解決具強磁馬達大型化之組裝問題。同 時,也建立後充磁馬達之創新設計流程,結合葉片 分析與後充磁限制,並透過有限元素軟體驗證分 析。此設計流程將有助於國內研發人員在設計大型 電動機時,於強磁性永磁電機大型化技術突破上之 參考。本計劃設計之環驅式推進器已於五月初進行 實體製作,並預計於六月底完工,七月初進行環驅 式推進器性能之測試,將測試結果與模擬值及設計 交叉比較。 動態定位平台方面,由實驗結果可了解命令與 推進量之關係,並有助於動態定位上的增益修正。 本小型動態定位平台硬體部份已經實現,各項測試 結果顯示出,對於船舶的操縱性,已經可以掌握, 實驗的記錄也表現出數據是可靠的。此部分研究將 做為未來目標工作載台動態定位控制之基礎。預計 七月底前將進行小型平台之動態定位功能實測。本 年度目前計畫達成率約 80%,俟七月底前將會達成 100%。 在成果發表方面,本計畫目前為止已投稿有SCI 國 際 知 名 期 刊 一 篇 (IEEE Transactions on Industrial Electronics)[13] , 目 前 文 章 修 訂 中 (in revision)。未來將陸續發表本計畫成果論文。
六
六
六
六、
、
、未來規劃
、
未來規劃
未來規劃
未來規劃
目前對於本實驗船的整個系統架構,已經有了 初步的實驗結果。以這些實驗數據為基礎,未來動 態定位平台須進行的工作: (a) 延遲時間:命令延遲時間長短,對於推進量之 修正速度,關係到平台響應的性能。本計畫將 修正驅動器設計以降低延遲時間。 (b) 推力與船速之關係:各螺槳推力與轉速、轉速 對應至當時船速的關係,密切影響著平台動態 定位的能力,因此必須利用實測的數據以作為 實際定位依據。 (c) 控制法則修正:要成功進行動態定位,控制法 則相當重要。未來尚須透過本次實驗結果釐清 各種轉換關係,來完成整個控制設計。七
七
七
七、
、
、參考文獻
、
參考文獻
參考文獻
參考文獻
[1]. C. K. Lee and B. I. Kwon, “Design of post-assembly magnetization system of line startpermanent-magnet motors using FEM,” IEEE Trans. Magn., vol. 41, no.5, pp. 1928-1931, 2005.
[2]. G. W. Jewell and D. Howe, “Computer-aided design of magnetizing fixtures for the post-assemblymagnetization of rare-earth permanent magnet brushless DC motors,” IEEE Trans. Magn., vol.28,no.5, pp. 3036-3038, 1992.
[3]. 廖福奕編譯,小型馬達技術,全華科技圖書,
2003。
[4]. P. Zheng et al, “Magnetization Analysis of the Brushless DC Motor Used for Hybrid Electric Vehicle,” IEEE Transactions on Magnetics, Vol.41, No.1, 2005.
[5]. C.C. Liang and W.H. Cheng, “The Optimum Control of Thruster System for Dynamically Positioned Vessels,” Ocean Engineering vol. 31, pp.97–110, 2004.
[6]. Yasuo Saito, Yukinobu Kohno, Masanori Hamamatsu, Hiroshi Ohnishi, Hiroshi Ikeda, Hiroaki Fujimoto and Kenichi Nakashima, “Development of Ship Maneuvering Control System with Online Nonlinear Optimal Control” Spring meeting of the Kansai Society of Naval Architects, 2002.
[7]. T.H. Lee, Y.S. Cao and Y.M. Lin, “Dynamic Positioning of Drilling Vessels with A Fuzzy Logic Controller,” International Journal of Systems Science, vol. 33, no. 12, pp. 979-993, 2002.
[8]. K.P.W. Lindegaard, Acceleration Feedback in Dynamic Positioning, Department of Engineering Cybernetics, Norwegian University of Science and Technology, 2003. [9]. A.B. Mahfouz and H.W El-Tahan,” On the Use
of The Capability Polar Plots Program for Dynamic Positioning Systems for Marine Vessels, ” Ocean engineering, vol. 33, pp.1070-1089, 2006.
[10]. Harbor Branch Oceanographic Institution, http://www.hboi.edu, 1 July 2008.
[11]. D. Hanselman, Brushless Permanent Magnet Motor Design Second Edition, The Writers' Collective, 2003.
[12]. Ansoft Corporation, Maxwell 2D field simulator user reference, 2000.
[13]. M.F. Hsieh, Y.C. Hsu, and D.G. Dorrell, “Design of Large Power Surface-Mounted Permanent-Magnet Motors Using Post-Assembly Magnetization,” IEEE Transactions on Industrial Electronics. (revised)