題 目: 電子式手眼協調評量工具的設計 組員姓名及學號: 王聰瑜 B9902205 組 別: 101C9
指 導 老 師: 林淵翔 教授
一 摘要
此專題為開發一套電子式手眼協調評量工具,這個工具可 以幫助教保人員(施測者)能夠更有效率地評估心智障礙者(受試 者)的手眼協調能力,也可幫助教保人員與治療師規劃更適性的 訓練課程 使心智障礙者獲得適當且有效的學習進展,提升其 獨立生活能力 加強其社區生活適應
所謂手眼協調能力為由眼睛將所看到的傳給大腦,大腦再
發出指 ,由手來操作之執行能力 此一能力常用以執行精細
作業,我們開發的評量工具就是讓受試者拿起跳棋棋子插入期
望的棋盤位子最後插滿整個棋盤 電子化中硬體是以微控制器
PIC18F4550 搭配紅外線感測器 CNY70 自動感應受試者操作的
數量 過程與步驟,與電腦軟體配合運作能正確輸出各次評量
後使用本工具的數據與結果做為能力狀態與課程規劃的參考
二 簡介
1 本專題特點:
開發出一套電子式手眼協調評量工具能提供教保員 更有效率地評估心智障礙者手眼協調能力 藉由受試者以 手拿取棋子,眼睛看到棋盤位子後將目的地經由神經回傳 給大腦,大腦下達指 操作手部肌肉把棋子插入棋盤目標,
模擬需要手眼協調的各種操作,使施測者從此電子式評量 工具所得到的數據資料能更有效率地評估受試者的各 能力;此 此 此電子式 此 電子式 電子式 電子式評量工具 評量工具 評量工具與傳統評量工具差別在於 評量工具 與傳統評量工具差別在於 與傳統評量工具差別在於能 與傳統評量工具差別在於 能 能 能自 自 自 自 動計時 動計時
動計時 動計時 記錄並 記錄並 記錄並 記錄並模擬出 模擬出 模擬出受試者插放 模擬出 受試者插放 受試者插放 受試者插放每步 每步 每步棋子時的路徑 每步 棋子時的路徑 棋子時的路徑與 棋子時的路徑 與 與 與 時間點 時間點
時間點 時間點,電腦端軟體可匯出三種資料:
(1)ini 檔 :紀錄每步棋子的路徑與時間點
(2)word 檔:紀錄單筆使用者基本資料與評量結果 (3)excel 檔:複寫更新每筆評量後的數據表格
這三種檔案中,ini 檔提供給電腦端軟體再次模擬回
顧棋子插放的過程;word 檔與 excel 檔提供給教保員與治
療師從受試者的健康資料與測試數據資料中評估能力狀
況
2 本專題的硬體規格:
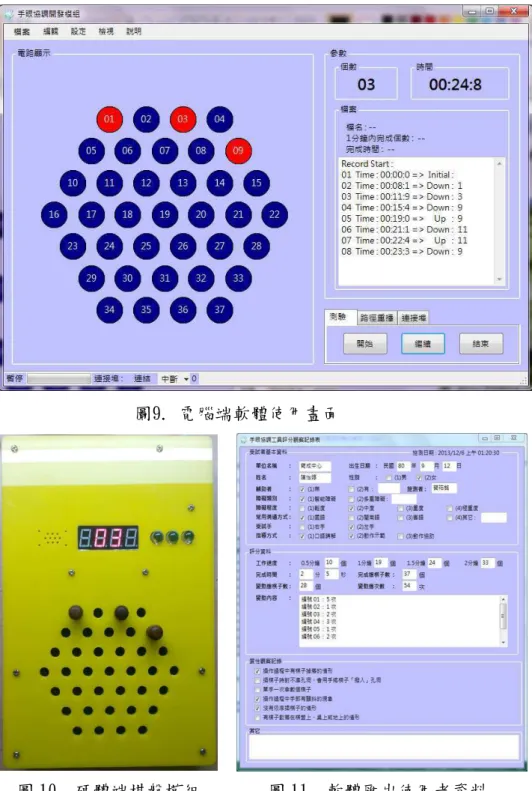
硬體模組為自行設計的棋子插放感測電路,配合傳統 的評量工具保持 37 個六角形排法棋子間距 18mm 孔徑 8mm,訂製的壓克力棋盤機殼(如圖 1)設計為黃色長方體 長 26.2cm 寬 17.5cm 高 4cm
感測電路(如圖 2)主要以微控制器 PIC18F4550 控制解 碼 IC-74HC238,以取樣頻率 25Hz 掃描 37 個紅外線感測 器 CNY70 電路輸出配置七段顯示器供受測者觀看 數,
三顆高亮度 LED 和喇叭在閒置過久未插入棋子時提醒受 試 者 繼 續 操 作 與 電 腦 端 軟 體 傳 輸 以 介 面 轉 換 IC- FT232RL 傳輸鮑率 11代200bps 的 USART 訊號
圖 1. 壓克力棋盤 圖 2. 棋盤內感測電路
3 本專題的軟體規格:
微控制器 PIC18F4550 為本專題韌體功能之單晶片,
所使用的軟體是 Microchip MPLAB IDE v8.89,並搭配 Microchip MPLAB C18 編譯器進行單晶片 C 語言的撰寫
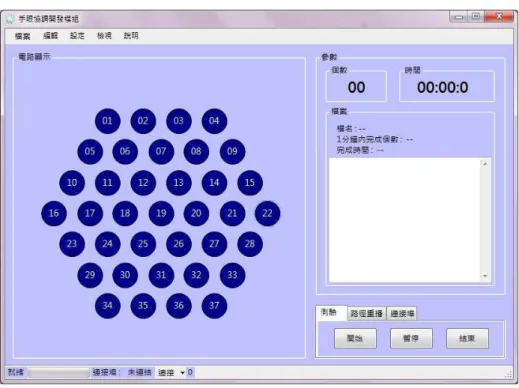
電腦端軟體則是使用 Microsoft Visual Studio Express 2012 進行 C#程式開發,程式設計具有測驗模式與路徑重 播模式 介面外觀如圖 3 所示,左方電路顯示部 顯示受 試者 37 個棋子插入狀況,右方顯示插入個數 花費時間 與每步棋插入拿取的時間點
圖 3. 電腦端軟體介面
三 使用方法
此專題需要即時偵測棋子插入的狀態,因此在硬體部 要 設計有相對應各個棋子的感測器元件,經感測器測得之訊號經 微控制器運算處理過後得到所有棋子的狀態,再配合電腦端軟 體的操作進行自動計時與紀錄棋譜,得以測試出評量手眼協調 能力所需的數據資料
本專題的硬體設計部 ,首先挑選用來感測棋子狀態的感 測器,我們列出了幾種方法與優缺點比較」如表 1)考慮正確性 與穩定性後決定使用紅外線感測器 CNY70 為本專題主要感測元 件 微控制器選擇 PIC18F4代代0 選擇的原因為其具有內建 13 通 道 ADC 電路,且具備較好的抗雜訊干擾與較快的指 週期 4T;
另一方面將來若有需要可以使用更快的 USB2.0 傳輸或 I2C 擴 充其他串列傳輸元件如 EEPROM 搭配多工掃描的方式完成的硬 體方塊如圖 4 所示
表 1. 感測器優缺點比較
感測器 CNY70 機械矩陣開關 光敏電阻 方便性 不須改造棋子 須改裝棋子 不須改造棋子 正確性 高」發射光自 產
生)
中」易因氧化造 成誤判)
低」易受環境光強弱 影響)
壽命
」穩定性)
高」不須接觸) 低」氧化易接觸 不良)
高」不須接觸)
擴充性 可從電壓變化偵 測距離變化
無 因環境光影響難從
電壓變化偵測距離
數顯示器
微控制器 PIC18F4代代0
感測器CNY70 讀出電路
資料傳輸 介面 解碼器
掃描電路
警示器 LED燈與喇叭
圖 4. 硬體方塊圖
本專題的韌體設計與軟體設計部份,首先以微控制器 PIC
之實驗板來做韌體撰寫與測試,為達成硬體需要用到 IO 讀入輸
出功能 類比數位轉換 串列傳輸…等,在硬體電路板上能完
成正確的感測器讀取後方能撰寫與電腦端軟體的封包傳輸程式
再來是電腦端軟體設計使用 C#製作出一個提供施測者操作手
眼協調評量過程的軟體,需要有串列傳輸 計時功能 輸出資
料檔案,並接收所有微控制器讀到的感測器狀態而傳到電腦的
封包數據,再運算完將對應的棋子狀態顯示出來與紀錄棋譜
四 實驗
1.
硬體製作:
以 Altium Designer 軟體繪製電路圖 電路板佈局 壓 克力棋盤機殼之機械鑽孔草圖
主要電路部 」如圖 代)為微控制器 PIC18F4代代0 控制解 碼 IC-74HC238 以輪流工作的方式來達到微控制器在有限輸 出埠上以最 的線路驅動最多的感測器,在接上緩衝 IC- ULN2803 UDN2981 增加輸出功率 讀入感測器與輸出顯示 器 數 使用多工掃描,同一時間只驅動一行感測器發射 端與七段顯示器因此也有省電的功效
圖 5. 主要電路圖
OSC1 OSC2
RC0 RC1 RC2 RC3 RC4 RC5
PGC PGD MCLR
+5V +5V
GND GND
RD6 RD7 SDA SCL
C2
22pF
C3 22pF
12
Y1 16Mhz GND
OSC1
OSC2
PGC PGD +5V GND MCLR
R4 51K R6 4.7K
GND +5V
MCLR 24 NC
8 NC
VCCIO4
RXD 5
RI 6
GND7
DSR 9
DCDCTS 1011
CBUS4 12 CBUS2 13 CBUS3 14 USBDP
15 USBDM 16
3V3OUT 17
GND18
RESET 19
VCC20 GND21
CBUS1 22 CBUS0 23
AGND25 TEST26
27 OSCI 28 OSCO
TXD 1 DTR 2 RTS 3 U5 FT232RL-Tray VBUS 1
D- 2 D+ 3 GND 4 6 5 J2
USB
C5
0.1uF C7 0.1uF
C8 100uF
R12 4.7K
R13 10K C10
0.1uF
GND
GND
GND GND
GND
GND PICRx
PICTx
RD0 RD1 RD2 RD3 RA4
RD4 RD5
GND
+5V +5V
Scan0 Scan1 Scan2 Scan3 Scan4 Scan5 Scan6 Scan7
P1
10K +5V
Scan8 Scan9 Scan10 Scan11
+5V
R15 470
D7 LED
GND Seg Scan
紅外線感測器 CNY70 電路使用矩陣式佈局(如圖 6) 在 全部的 CNY70 發射端上,正極加以電晶體控制 5V 電源讓 微控制器進行環境光判斷,負極則接上緩衝器 ULN2803 因 此能穩定的多工掃描 5 行 8 列共 37 個感測器;CNY70 接收 端拉回 PIC18F4550 的 PORTA,PORTA 具有數位類比兩種 輸入方式可以視情況調整選擇
數顯示電路也是使用掃描 換顯示位數(如圖 7) 四 連七段顯示器正端接上緩衝器 UDN2981,負端接上解碼器 74LS47 顯示掃描到的七段顯示器數 與 PIC18F4550 的 RA4 控制小數點
圖 6. 感測電路圖
圖 7. 數顯示電路圖
A K
C E X1
CNY70
A K
C E X2
CNY70
A K
C E X3
CNY70
A K
C E X4
CNY70
A K
C E X5
CNY70 A K
C E X6
CNY70
A K
C E X7
CNY70
A K
C E X8
CNY70
A K
C E X9
CNY70
A K
C E X10
CNY70 A K
C E X11
CNY70
A K
C E X12
CNY70
A K
C E X13
CNY70
A K
C E X14
CNY70
A K
C E X15
CNY70 A K
C E X16
CNY70
A K
C E X17
CNY70
A K
C E X18
CNY70
A K
C E X19
CNY70
A K
C E X20
CNY70 A K
C E X21
CNY70
A K
C E X22
CNY70
A K
C E X23
CNY70
A K
C E X24
CNY70
A K
C E X25
CNY70 A K
C E X26
CNY70
A K
C E X27
CNY70
A K
C E X28
CNY70
A K
C E X29
CNY70 A K
C E X30
CNY70
A K
C E X31
CNY70
A K
C E X32
CNY70
A K
C E X33
CNY70 A K
C E X34
CNY70
A K
C E X35
CNY70
A K
C E X36
CNY70
A K
C E X37
CNY70 R18
270->220
R19 270->220
R20 270->220
R21 270->220
R22 270->220
R23 51KR24
51KR25 51KR26
51KR27 51K
Scan0 Scan1 Scan2 Scan3 Scan4 Scan5 Scan6 Scan7
+5V+5V+5V+5V+5V
AN0 AN1 AN2 AN3 AN4 CNY70EN
GND
+5V +5V
RA4
SegA SegB SegC SegD SegE SegF SegG SegDot
SegA SegB SegC SegD SegE SegF SegG SegDot Dig0 Dig1 Dig2 Dig3
11 a 7 b 4 c 2 d 1 e 10 f 5 g
3 dp
D112 D29 D38 D46
SEG1 Number R35 220
R36 220 R37 220 R38 220 R39 220 R40 220 R41 220 R42 220 BI/RBO
4 5 RBI 3 LT
7 A 1 B 2 C
D(MSB) 6
a 13 b 12 c 11 d 10
e 9
f 15 g 14 VCC 16
8 GND U6
74LS47 RB2
RB3 RB4 RB5
2. 軟體發展:
程式 為硬體韌體端與電腦軟體端,韌體方面微控制 器PIC18F4代代0流程圖」如圖8)所示,PIC18F4代代0一上電後則 韌體主程式先設定各個IO對應的輸入輸出,接著初始化ADC 中斷優先權 Timer與USART等等,初始化完即 表主程式進 入休眠
當USART發生中斷時,程式進入中斷副程式立即對收到 的封包判斷所要進入的施測遊戲工作模式,主要 為開關 閒置警告 開關每0.1秒回傳棋子狀態封包的Timer 另外設有一個每8ms發生中斷的Timer負責讀取感測器 與輸出 數,每發生一次中斷則 換讀取另一行感測器與 顯示另一個七段顯示器,讀取感測器的同時在感測器發射 端加以脈波頻率來驗證其讀回信號,藉此克服外在環境光 對感測器CNY70接收端的影響,來達到讀回穩定的感測器上 方棋子狀態 讀完代排感測器後將更新七段顯示器顯示 數,
並將每個棋子狀態 到暫 器中供回傳封包使用 整體掃
描速度上讀取感測器與更新 數是2代Hz,四連七段 換顯
示是令2.代Hz,因此在實際使用下人體感覺是立即更新顯示
並不覺得有 換的延遲
圖 8. 微控制器韌體流程圖
電腦端軟體介面使用 C#設計而成,主要 為以下介面:
連接測驗或重播模式 換 開始結束按鈕 顯示感測棋子狀 態的區域 插入棋子數量與花費時間等等所組成
程式碼首先納入各定義檔,接著宣告所需用到的變數,
設定串列傳輸之鮑率與 COM Port,再來就是編寫各個功能
首先使用的 連接 按鈕功能為啟動串列傳輸 復規微控制
器狀態 開始 按鈕功能在測驗模式時包含:傳輸給微控
制器開始施測的封包 自動計時施測時間與紀錄棋譜;在重
播模式時包含:開始計時與回播棋譜紀錄 結束 按鈕功
能包含:傳輸給微控制器結束施測的封包 提前關閉自動計
時與統計插入棋子的完成速度等數據資料
3. 實測結果:
電腦端軟體連接硬體模組後,當施測者於電腦端按下 開始鍵後,一直到受試者將最後一個棋子 插好 之前,計 時器會一直計時,並且電腦端立即顯示各個棋子插放狀態 最後會將每個棋子之插入時間作紀錄,系統軟體會自動計 算一 鐘插完幾個棋子並顯示總花費時間,施測者只要在 電腦就可以觀看使用者於棋盤上操作棋子的各種狀況 如 圖 9 所示
硬體端棋盤模組立即顯示 數」正確插上棋子的數量) 在七段顯示器上,如圖 10 所示 當系統計算使用者閒置了 十秒 十五秒 二十秒時間未插入棋子,不只電腦軟體會記 錄閒置秒數,硬體棋盤三個警示 LED 燈依序點亮並配合喇 叭播放電子音樂用以提醒受試者停頓時間過久
電腦端軟體除了透過傳輸介面連接棋盤上微控制器
PIC18F4代代0 進行操作,也能錄製棋子插放的時間與路徑
序,再次播放供施測者評估使用者操作狀況 並將測試的結
果與使用者資料匯出成 ini 路徑檔案 excel 檔案與 word
檔案,以方便做上傳 資料建檔等進一步的處理討論,如圖
11 所示
圖9. 電腦端軟體使用畫面
圖 10. 硬體端棋盤模組 圖 11. 軟體匯出使用者資料
目前 目前 目前 目前 經與育成社會福利基金會合作並提供測試了三 經與育成社會福利基金會合作並提供測試了三 經與育成社會福利基金會合作並提供測試了三 經與育成社會福利基金會合作並提供測試了三 套 套
套 套插放棋子 插放棋子 插放棋子硬體 插放棋子 硬體 硬體 硬體模組 模組 模組, 模組 , , ,以 以 以各單位機構實測後提供 以 各單位機構實測後提供 各單位機構實測後提供 各單位機構實測後提供數據資料 數據資料 數據資料 數據資料 的 的
的 的完成總時間排序後 完成總時間排序後 完成總時間排序後 完成總時間排序後」 」」 」如表 如表 如表 如表 2) 2) 2) 2), , , ,可以發現此 可以發現此 可以發現此 可以發現此專題開發之 專題開發之 專題開發之 專題開發之電子 電子 電子 電子 式 式
式 式評量工具能有效地測驗 評量工具能有效地測驗 評量工具能有效地測驗評估 評量工具能有效地測驗 評估 評估 評估出不同使用者的手眼協調能 出不同使用者的手眼協調能 出不同使用者的手眼協調能 出不同使用者的手眼協調能 力 力
力 力 由於現階段此系統剛開發完成 由於現階段此系統剛開發完成 由於現階段此系統剛開發完成, 由於現階段此系統剛開發完成 , ,而我們相信將來廣泛使 , 而我們相信將來廣泛使 而我們相信將來廣泛使 而我們相信將來廣泛使 用 用
用 用此工具 此工具 此工具後 此工具 後 後除了 後 除了 除了 除了讓教保 讓教保 讓教保人員 讓教保 人員 人員 人員 治療師們更有效率地了解 治療師們更有效率地了解障 治療師們更有效率地了解 治療師們更有效率地了解 障 障 障 礙者 礙者
礙者 礙者能力狀況並將評量結果 能力狀況並將評量結果 能力狀況並將評量結果 能力狀況並將評量結果應用在教學設計上 應用在教學設計上 應用在教學設計上 應用在教學設計上, , , ,也能 也能 也能 也能將 將 將 將此 此 此 此 系統 系統
系統 系統規劃為 規劃為 規劃為 規劃為訓練 訓練 訓練課程 訓練 課程 課程之一 課程 之一 之一, 之一 , , ,藉此提升心智障礙者手眼協調 藉此提升心智障礙者手眼協調 藉此提升心智障礙者手眼協調, 藉此提升心智障礙者手眼協調 , , , 加強他們獨立生活的能力
加強他們獨立生活的能力 加強他們獨立生活的能力 加強他們獨立生活的能力
表2. 各單位機構實測後部 數據資料
編號 單位名稱 年齡 工作速度
秒個數
工作速度 分鐘個數
工作速度 分鐘個數
個棋子 完成時間 秒
恆德站 歲 --
PCP 團體 歲 --
PCP 團體 歲 --
夢想工坊 歲 --
蘭興 歲 --
恆德站 歲 --
夢想工坊 歲 --
蘭興 歲 --
夢想工坊 歲 PCP 團體 歲
蘭興 歲
夢想工坊 歲 夢想工坊 歲 夢想工坊 歲
蘭興 歲
蘭興 歲
五 討論
完成之功能如預期在大多環境下皆能正確偵測棋子插入的 狀態 但若以紙張遮蔽棋盤表面可能因為這種材質與距離上,
恰巧使紅外線感測器接收端的電壓正是微控制器 PIC18F4代代0 的數位轉態電壓,而造成即使發射端加以脈波驗證讀回頻率後 仍會有誤判
雖然各單位在實際施測時,並無發生此狀況過程 但若需
要解決此誤判狀況,可修改微控制器 PIC18F4代代0 韌體,將讀取
感測器的方式從多工數位輸入模式改成多工類比輸入,以程式
撰寫數位的窗型比較器讓轉態方式具有正轉態電壓與負轉態電
壓,藉此原理解決輸入正好為數位轉態電壓造成的誤判 甚至
可以設計一個校正副程式,讀取棋子完全插入與完全取出時的
兩個電壓值修正為窗型比較器之正負轉態電壓,搭配原本的發
射端加以脈波驗證讀回頻率,在這樣的雙重驗證下更能正確且
穩定的讀回棋子插放的狀態
六 結論
本專題經過多次實測意見回饋與修改後如預期之想法達成 預定的電子化目標:傳統的評量工具是需要施測者用碼表計時,
並且無法紀錄每步棋的間格時間 本專題的評量工具可以自動計 時 減 手動上的誤差,也能錄製插放棋子的路徑 時間點,並 將紀錄資料匯出建檔 如此可以減 施測者的操作負擔,也能將 評量工具的標準統一化,事後更可以針對單筆或全部評量資料進 行討論規劃適當的課程 因此用我們製作的工具,就好像一把尺 一樣,能有效辨別受試者的手眼協調能力狀態 測出的這些數據 可以提供給物理或職能治療師 教保員等,進行規劃更適當且個 別化的訓練課程,使身心障礙者獲得適當且有效的學習進展,提 升他們獨立生活的能力
經過這次的專題讓我學會從硬體電路設計 機殼製作 軟體
開發 使用意見回饋等等產品化的過程 未來育成社會福利基金
會或其他機構若須要開發更多的電子化使用工具,可以藉由此專
題經驗再把硬體模組電路中的 DIP 包裝 IC 與電阻換成 SMD 包裝
壓克力設計上增加隱藏螺絲的溝槽,完成更薄更美化後的新版電
子式產品!
七 參考資料
書籍文本:
微處理器原理與應用 : C 語言與 PIC 18 微控制器 / 曾百由著
網路資源:
http://www.alldatasheet.com/
http://www.microchip.com/
http://www.microchip.com.tw/Taiwan_CAE/APP013_Manual.pdf
實 務專題報告授權同意書
本授權書所授權之報告為本組在國立臺灣科技大學三翌J l耳多——系
f” I, 「 組 / 。 l 學 年 度第 —三 學 期修 習實務 專題 課程 之報 告。
專 題報 告名 稱 译 1萄寺 邑眨 IJn; 同盞 : ̄: 貝e勻截 +
本 組 就 具 有 著 作 財 產 權 之 報 告 全 文 資 料 , 同 意 提 供 本 校圖 書館 進行 機構 典藏 ,並 同 意 圖 書 館 因 典 藏 之 目 的 就 該 資 料 進 行 必 要 之 數 位 化 重製 ,且 依圖 書館 法、 著作 權 法 規 定 以 電 子 形 式 透 過 單 機 、 網 際 網 路 、 無 線 網 路 或其 他公 開傳 輸方 式, 提供 用 戶 進 行 檢 索 、 瀏 覽 、 下 載 、 傳 輸 、 列 印 等 。
上 述 授 權 內 容 均 無 須 訂 立 讓 與 及 授 權 契 約 書 。 依 本 授 權之 發行 權為 非專 屬性 發行 權 利 。 依 本 授 權 所 為 之 收 錄 、 重 製 、 發 行 及 學 術 研 發 利 用 均 為 無 償 。 本 組 擔 保 本 著 作 係 著 作 人 之 原 創 性 著 作 , 並 未 侵 害 任何 第三 人之 智慧 財產 權。 倘 若 有 抄 襲 行 為 進 而 造 成 侵 害 他 人 著 作 權 之 情 形 , 願 自 行 負 擔 相 關 法 律 責 任 。
請勾選電子全文檔授權公開年限:
口 立 即 公 開 口 一 年 復 公 開 口三 年 後 公 開 口 四 年後公開
指導老師姓名:裕iii}j;攔
學生簽名::i-只邑玉角,l 學號
(親筆正楷)
口 二 年 復 公 開 圃’ 五年後公開
(務必填寫)