第六章 實驗
本章主要討論本系統在不同條件下各場景的運作情形。討論的內 容包括本系統在各種天氣下的實驗結果、本系統在單一車道及多車道 的運作方法及實驗結果、以及在各種不同地點所做的實驗的結果。在 實驗中,我們都將說明每個實驗所在的地點、天氣、及單一車道或多 車道。圖 6-1 為本系統中各車種的圖示。本系統中影像解析度為 320*240,攝影機每秒拍攝 30 張,並使用 Pentium4 1.8GHz 的電腦當
主機。令 S 為實際車輛數,E 為錯誤車輛,則正確率 C 的算法為
S E
C S
= − %。首先 6.1 討論本系統在分別在晴天、陰天、及雨天三種
天氣下各車種的統計情形。6.2 討論本系統在單一車道及多車道各車 種的統計情形,並且討論系統如何使用在多車道場景。6.3 則是車輛 停留在監測行所得到的實驗結果及解決方法。
圖 6-1 本系統車輛分類圖,由上至下,由左至右,分別為小客車、
貨車、小卡車、載卡多、箱型車、大卡車。
6.1 天氣對本系統的影響
本節中主要比較在晴天、陰天、及雨天三種天氣對系統的影響。
我們在同一個地點的匝道上分別在這三種天氣下取得監測影像的資 料。
實驗一
地點:重慶北路接國道一號(台北交流道)
單一車道∕多車道:單一車道 天氣:晴天
圖 6-2 晴天匝道圖
實際數量 辨識數量 錯誤數量 正確率(%)
小客車 423 395 28 93.38
小卡車 82 70 12 85.36
大卡車 46 42 4 91.30 麵包車 132 121 11 91.66
箱型車 200 185 15 92.50
貨車 96 90 6 93.75
大客車 52 47 5 90.38 表 6-1 晴天車輛統計表
實驗二
地點:重慶北路接國道一號(台北交流道)
單一車道∕多車道:單一車道 天氣:陰天
圖 6-3 陰天匝道圖
實際數量 辨識數量 錯誤數量 正確率(%)
小客車 563 539 24 95.73
小卡車 126 113 10 89.68
大卡車 87 81 6 93.10 麵包車 164 150 14 91.46
箱型車 303 281 22 92.73
貨車 186 175 11 94.08
大客車 92 82 10 89.13 表 6-2 陰天車輛統計表
實驗三
地點:重慶北路接國道一號(台北交流道)
單一車道∕多車道:單一車道 天氣:下雨,且路面潮濕
圖 6-4 雨天匝道圖
實際數量 辨識數量 錯誤數量 正確率(%)
小客車 396 384 12 96.96
小卡車 84 75 9 89.28
大卡車 36 33 3 91.66 麵包車 113 107 6 94.69
箱型車 281 270 11 96.08
貨車 127 116 11 91.33
大客車 64 60 4 93.75 表 6-3 雨天車輛統計表
實際數量 辨識數量 錯誤數量 正確率(%)
小客車 1382 1318 64 95.36
小卡車 292 261 31 89.38
大卡車 169 156 13 92.30 麵包車 409 378 31 92.42
箱型車 784 736 48 93.87
貨車 409 381 28 95.01
大客車 208 189 19 90.86 表 6-4 統計總和
討論
由上述三個實驗結果看來,天氣對本系統沒有影響。天氣對本系 統無法造成影響的原因如下:由於攝影機架設於道路側面,鏡頭角度 與車輛行駛方向成 90°拍攝交通影像。這樣的架設位置使得道路路面 僅佔監測影像畫面面積的 1∕5,因此在晴天下不會有陰影的問題,
並且在雨天下不會有車輛倒影的問題。
在這三個實驗中,導致系統辨識錯誤的主要原因為,一、車輛載 運的物品影響辨識的效果,例如小卡車若載運一巨大的長方體,則系 統很容易會將其辨識為貨車。二、車行速度極度緩慢,或車輛停留在 監測行上,且系統無法正確合併車輛,導致系統無法取出正確的車輛
外型而產生錯誤。三、大客車車身上的彩繪亦會影響分類結果,花色 較為豐富的車身使得車輛在通過監測行時,車身的部分都能產生足夠 的變化點,因此能完整地表達車輛外型,故有較高的辨識率。一、車 行速度太快,導致系統無法取得足夠的變化點。車速太快使得系統無 法在車輛的各部位平均地取得外型,導致系統擷取車輛外型遭扭曲,
因此做出錯誤的車種判斷。
6.2 系統在多車道的運作情況
在多車道的場景,我們將監測行的位置設定於分隔島上的燈桿 處,利用燈桿來隔絕其他車道的車輛影像。利用這種方法,系統可以 在多車道的環境下進行單一車道的車輛辨識,以下是實驗結果。
實驗四
地點:信義路四段
單一車道∕多車道:多車道 天氣:陰天
備註:圖 6-5 為監測影像中監測行的位置。圖 6-6 為相對應的影片的 片段 EPI。
圖 6-5 信義路多車道
圖 6-6 影片 EPI-1
實際數量 辨識數量 錯誤數量 正確率(%)
小客車 35 35 0 100
小卡車 4 4 0 100
大卡車 0 0
麵包車 2 2 0 100
箱型車 16 15 1 93.75
貨車 2 2 0 100
大客車 0 0
表 6-5 多車道車輛統計表-1
實驗五
地點:松山路
單一車道∕多車道:多車道 天氣:陰天
時間:下午 1:30
備註:圖 6-7 為監測影像中監測行的位置。圖 6-8 為相對應的影片的 片段 EPI。
圖 6-7 松山路多車道
圖 6-8 影片 EPI-2
實際數量 辨識數量 錯誤數量 正確率(%)
小客車 51 49 2 96.07
小卡車 12 12 0 100
大卡車 6 6 0 100
麵包車 10 10 0 100
箱型車 26 24 2 92.30
貨車 8 8 0 100
大客車 0 0 表 6-6 多車道車輛統計表-2
討論
由圖 6-5 及 6-6 可以看出,我們將監測行的位置設定於監測影像 中的燈桿處,可以隔絕其他車道的影像,解決 occlusion 的問題。從 表 6-6 可看出,本系統可正確地在多車道的環境下執行。
6.3 車輛停留在監測行 實驗六
地點:重慶北路接國道一號(台北交流道)
單一車道∕多車道:單一車道 天氣:陰天
備註:車輛停留在監測行。圖 6-9 為影片中車輛停留在監測行時的片 段 EPI。
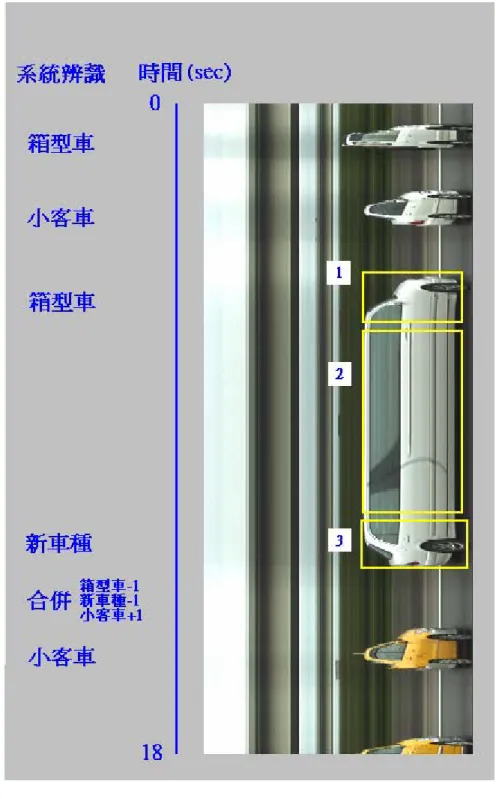
圖 6-9 影片 EPI-3
討論
當車輛停留在監測行上時,系統會不斷累積監測行的像點值至 EPI 上,導致系統誤將一台車輛誤判為兩台。如圖 6-8 中標示處 1,
由於車輛移動,因此會產生變化點。標示處 2 則因為車輛停留在監測 行上,因此不會產生變化點,使得系統誤判標示處 1 的車輛離開監測 行,並對該車輛作分類。當車輛再度啟動時,如標示處 3,則又會產 生變化點,此時系統又會誤判另一台車輛進入,並對該車輛作分類。
因此我們可以從圖左側的系統辨識知道,當系統每次做完辨識的工作 之後,系統便會將這次的車輛 EPI 與上次的車輛 EPI 做比較,以判斷 是否為同一台車。若是同一台車,則合併車輛,並且更改車輛的統計 數據。由上述得知,系統辨識的結果會先對箱型車數量加 1,接著建 立一個新車種。當系統發現為同一車輛,則作車輛合併的動作並且辨 識之,最後更正統計數據。由此可知,我們的系統可以解決車輛停留 在監測行上所造成的問題。