ht c 2006 臺灣大學教務處 Academic Affairs Division, National Taiwan University 管
國立臺灣大學工學院土木工程學系 碩士論文
Department of Civil Engineering College of Engineering
National Taiwan University Master Thesis
預力混凝土梁預力之非破壞檢測技術試驗研究 Development of a Non-Destructive Testing Technique for
Identification of Prestress Force in Concrete Beams
魏星池 Wei, Hsing-Chih
指導教授:張國鎮 教授
Major Professor: Chang, Kuo-Chun
中華民國 106 年 7 月
July, 2017
II
致謝
首先感謝恩師 張國鎮教授給予學生在課業與研究上的指導,讓學生能夠在 喜愛的橋梁領域上能夠更深入的學習,精進學問充實自我。
感謝口試委員 宋裕祺教授、陳振川教授及歐昱辰教授提供的寶貴意見,使 學生能從更多不同角度思考研究問題,使本論文能夠更加完整與充實。
感謝陳俊仲學長與 Dr.Bonopera 在研究探討與論文撰寫過程中,給予許多教 導與照顧,幫助我逐漸地於研究領域的學習成長,使得本論文能夠完成與豐富。
在研究所生活中,最感謝的就是 912 的勇安學長、毅恩、致寬、濤、繁嫣、
筑媛、雨潔、維苓的陪伴,大家真的太溫暖,願意給予我這依附在 912 的人支持 與鼓勵,每當感到想放棄時,912 的大家給予我堅持下去的毅力,每當傷心難過 時,912 的大家可以將我傷心的淚水轉變為感恩的淚水,沒有 912 大家,這本論 文絕對無法完成,對於 912 大家的感謝已經不是三言兩語能表示了,跟大家的相 處與歡樂時時刻刻都溫暖著內心,是我碩班人生中最大的收穫。
碩班兩年日子感謝正鴻學長幫助我這麻煩的學弟度過一切,給予我許多無論 是課業還是人生上的意見,能夠遇見這麼好的學長,真的很幸福。也感謝樊鵬學 長於研究與實驗上的協助,幫助我能更順利的進入研究的生活中。
感謝 514 同窗的宜甄與聖凱共同完成研究所許多的挑戰,特別感謝宜甄給予 我的包容,面對煩人、躊躇的我,願意耐心的處理與諒解。謝謝 514 學弟妹聖雯、
詠安、世昇幫助我的實驗順利完成,以及為研究室帶來朝氣。
最後要感謝的是我生命中最重要的家人,感恩爸媽、姊姊與妹妹成為我堅強 的後盾,讓我能無後顧之憂的完成學業,求學過程中離家跑遍台灣南北,但家總 能保護我、療癒我,使我充飽電,迎接與克服人生道路上各種挑戰與難關。
短短兩年的光陰中遭遇許多經歷,期許自己汲取獲得的經驗更加成長,不辜 負自我初心、不辜負所有真心支持與真誠關心我的人,成為能懷有夢想與實踐夢 想的人,真摯而成熟的人。
III
中文摘要
面對橋梁老化問題,須對橋梁全生命週期進行有效管理,掌控橋梁劣化及損 壞趨勢。預力橋廣泛應用於公路、鐵路等交通建設中,然而預力橋梁在其服務使 用年限中,會遭遇不同劣化原因,如混凝土潛變、鋼鉸線鬆弛、腐蝕等因素造成 預力損失,影響預力橋梁之耐久性,嚴重時可能損及其安全性。目前現有檢測技 術多為破壞性檢測方式,實際應用上較難以執行,因此本研究嘗試發展一套非破 壞性檢測方法用以檢測預力梁之預力。
本研究透過放大係數法及其演變方法應用於預力梁之預力檢測,由試驗得到 之變位與必要之參數,求得構件之軸力。本研究透過七米矩形混凝土梁與十五米 實尺寸混凝土梁驗證本方法於檢測預力梁之預力效果。由試驗結果顯示當具有較 明顯二階效應條件時,如預力越大或變位越大時更易獲得準確之預力識別結果。
且試驗結果亦顯示試驗施加集中力需小於軸力的十分之一條件才能得到符合理 論基礎之試驗結果。
由本研究試驗結果,建議試驗之橫向集中力不宜過大,以及量測位置建議以 變位最大處為佳,直線配置鋼腱之預力梁在滿足以上條件時可獲得準確之預力識 別結果,當試驗橫向力更大時或拋物線配置鋼腱之預力梁,其結構行為可能受鋼 腱與套管作用等因素影響,造成非預期之行為,此部分有待後續研究深入探討。
關鍵字:預力梁、預力檢測、變位量測、I型梁、直線鋼腱
IV
ABSTRACT
Facing the aged problem of bridges, it is necessary to administrate the full lifecycle of bridges. Prestressed bridges are widely applied in highway and railway. However, prestressed bridges encounter a variety of deteriorating reasons and affect the safety, like creep of concrete, relaxation of tendon…etc.
This study uses magnification factor method to develop a non-destructive testing method to identify the prestress force in the concrete beams. Using the deflections to get the axial force. In this study, verifying the method by the experiments of 7m and 15m prestressed beams. The results show that the identifications are well under the II- order effect is significant. The results also show the applied concentrated force couldn’t be larger than one tenth of prestress.
According the results of this study, it suggests the applied concentrated force shouldn’t be too large and the measured position is better at the position occurs the maximum deflection. For the prestressed beams with the straight tendon, it could get accuracy identifications under above conditions. For parabolic shape tendon case, it may be affected by some unknown reasons and need detail study in the future.
Keywords:prestressed beam, prestress force identification, deflection measurement, I- shape beam, straight tendon
V
目錄
致謝... II 中文摘要 ... II
ABSTRACT ... IV
第一章 緒論... 1
1.1 研究背景... 1
1.2 研究動機與目的 ... 1
1.3 研究流程與論文架構 ... 2
第二章 文獻回顧 ... 4
2.1 預力損失劣化特性 ... 4
2.2 預力構件預力檢測技術 ... 5
2.2.1 靜態方法... 5
2.2.2 動態方法... 7
2.3 相關試驗研究回顧 ... 8
第三章 研究方法 ... 16
3.1 簡支梁撓度應用公式 ... 16
3.2 連續梁撓度應用公式 ... 21
3.3 修正放大係數法 ... 27
3.4 小結 ... 28
第四章 矩形斷面單跨簡支梁試驗 ... 40
4.1 試體設計 ... 40
4.2 試驗規劃 ... 41
4.2.1 儀器配置... 41
4.2.2 試驗流程... 42
4.3 試驗結果 ... 44
4.3.1 抗壓試驗結果... 44
4.3.2 變位量測結果... 44
4.4 試驗分析與探討 ... 45
第五章 I 型斷面單跨簡支梁試驗 ... 71
5.1 直線型預力鋼腱配置 ... 71
VI
5.1.1 試體設計... 71
5.1.2 試驗規劃... 73
5.1.3 試驗結果... 76
5.1.4 試驗分析與探討... 81
5.2 拋物線型預力鋼腱配置 ... 86
5.2.1 試體設計... 86
5.2.2 試驗規劃... 87
5.2.3 試驗結果... 89
第六章 I 型斷面雙跨連續梁試驗 ... 123
6.1 試體設計 ... 123
6.2 試驗規劃 ... 124
6.3 試驗結果與探討 ... 128
第七章 結論與建議 ... 143
7.1 研究綜合結論 ... 143
7.2 未來研究建議 ... 145
參考文獻 ... 147
附錄 A I 型斷面簡支梁直線鋼腱配置變位量測結果與分析值比較 ... 150
附錄 B I 型斷面簡支梁拋物線鋼腱配置變位量測結果與分析值比較... 155
附錄C I 型斷面連續梁拋物線鋼腱配置變位整理結果與分析值比較 ... 159
VII
圖目錄
圖 1.3.1 研究流程圖... 3
圖 2.1.1 LOWE’S MOTOR 橋 ... 10
圖 2.1.2 圓山橋... 10
圖 2.1.3 KOROR BABELTHAUP 橋 ... 10
圖 2.2.1 十字弓法... 11
圖 2.2.2 校正試驗使用之圖表... 11
圖 2.2.3 扁平式千斤頂... 11
圖 2.2.4 切槽法示意圖... 12
圖 2.2.5 CONCRETE STRESS RELIEF CORE METHOD ... 12
圖 2.2.6 CONCRETE CORE TREPANNING METHOD ... 13
圖 2.3.1 空間框架二之設計圖... 13
圖 2.3.3 空間框架二柱軸力估計值與量測軸力值之比較... 14
圖 2.3.4 空間桁架之試驗配置圖... 14
圖 2.3.5 空間桁架軸向壓力估計值與量測軸力值之比較... 14
圖 2.3.6 預力混凝土梁試體試驗光纖位移傳感器佈置... 15
圖 2.3.7 預力箱型鋼梁試體強軸試驗實際預力值與預估預力值... 15
圖 3.1.1 考慮之簡支梁... 38
圖 3.1.2 (A)受軸力前變形與彎矩 (B)受軸力後變形與彎矩 ... 38
圖 3.1.3 初始變位... 38
圖 3.2.1 連續梁... 39
圖 3.2.2 連續梁化簡為簡支梁... 39
圖 3.2.3 受側力之剪支梁... 39
圖 3.2.4 受梁端彎矩簡支梁... 39
圖 3.2.5 集中載重與梁端彎矩作用(傾角變位法) ... 39
圖 4.1.1 預力矩形梁尺寸圖... 57
圖 4.1.2 梁端側視與正視尺寸圖... 57
圖 4.1.3 矩形混凝土預力梁... 57
VIII
圖 4.1.4 SAP2000:受預力 820KN 受壓情形 ... 57
圖 4.1.5 SAP2000:受預力 820KN 和側向力 25KN 情形 ... 58
圖 4.2.1 支承配置... 58
圖 4.2.2 致動器與門形構架... 58
圖 4.2.3 錨錠座與荷重計... 59
圖 4.2.4 施加預力側錨錠配置... 59
圖 4.2.5 荷重計配置... 60
圖 4.2.6 接觸式高感度位移計... 60
圖 4.2.7 位移計架設配置... 60
圖 4.2.8 位移計架設位置... 61
圖 4.2.9 試驗位移計設置位置... 61
圖 4.3.1 應力應變曲線圖... 62
圖 4.3.2 應力應變曲線圖... 63
圖 4.3.3 由鉸支承處求得各點待修正變位... 63
圖 4.3.4 由滾支承處求得各點待修正變位... 64
圖 4.3.5 考慮之等值外力預力梁模型... 64
圖 4.3.6 預力 625KN 及橫向力 20KN 下實驗變位與分析比較 ... 64
圖 4.3.7 預力 625KN 及橫向力 22.5KN 下實驗變位與分析比較 ... 65
圖 4.3.8 預力 625KN 及橫向力 25KN 下實驗變位與分析比較 ... 65
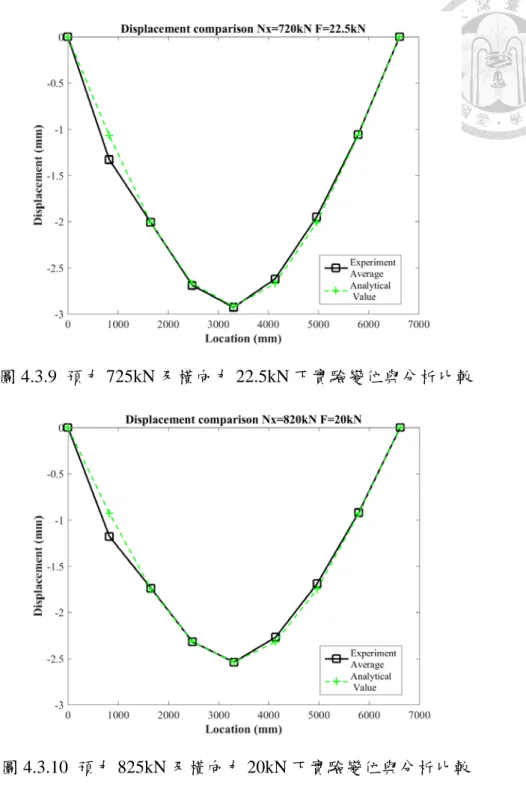
圖 4.3.9 預力 725KN 及橫向力 22.5KN 下實驗變位與分析比較 ... 66
圖 4.3.10 預力 825KN 及橫向力 20KN 下實驗變位與分析比較 ... 66
圖 4.3.11 預力 825KN 及橫向力 22.5KN 下實驗變位與分析比較 ... 67
圖 4.3.12 預力 725KN 及橫向力 20KN 下實驗變位與分析比較 ... 67
圖 4.3.13 預力 725KN 及橫向力 25KN 下實驗變位與分析比較 ... 68
圖 4.3.14 預力 825K 及橫向力 25KN 下實驗變位與分析比較 ... 68
圖 4.3.15 預力、橫向力與誤差三維關係圖... 69
圖 4.3.16 彎矩圖 NX=620KN ... 69
圖 4.3.17 彎矩圖 NX=725KN ... 69
圖 4.3.18 彎矩圖 NX=820KN ... 70
IX
圖 4.4.1 估算預力... 70
圖 5.1.1 I 型預力混凝土梁縱面圖 ... 101
圖 5.1.2 I 型預力混凝土梁斷面圖(直線配置) ... 101
圖 5.1.3 直線配置旋韌套管及預埋承壓座... 101
圖 5.1.4 坍流度試驗... 102
圖 5.1.5 梁斷面配筋... 102
圖 5.1.6 梁縱面配筋... 102
圖 5.1.7 試體組立與灌漿照... 103
圖 5.1.8 支承照片 (左:鉸支承 右:滾支承) ... 103
圖 5.1.9 軸力系統之油壓千斤頂與荷重計... 104
圖 5.1.10 軸力系統... 104
圖 5.1.11 轉接段 ... 105
圖 5.1.12 錨錠版... 105
圖 5.1.13 承壓環與前版... 106
圖 5.1.14 預力系統組立之情況... 106
圖 5.1.15 複線用油壓千斤頂... 106
圖 5.1.16 四百噸荷重計... 107
圖 5.1.17 高感度位移計... 107
圖 5.1.18 梁跨中點位移計... 108
圖 5.1.19 位移計架設情況... 108
圖 5.1.20 變位量測位置... 108
圖 5.1.21 抗壓試驗應力應變圖... 109
圖 5.1.22 預力 1570KN 位移比較圖 ... 110
圖 5.1.22 預力 1940KN 位移比較圖 ... 112
圖 5.1.23 (A)LOADCELL1 校正記錄 ... 112
圖 5.1.23 預力 160 噸至 180 噸量測記錄... 113
圖 5.1.24 預力 160 噸至 180 噸量測記錄(平移比較) ... 113
圖 5.1.25 預力滑動損失示意圖... 113
圖 5.1.26 分析值對應之模型... 114
X
圖 5.1.27 實驗變位處理流程... 114
圖 5.1.28 梁跨中點處變位求得之 EI 值 ... 114
圖 5.1.29 梁跨 3L/4 處點 3 變位求得之 EI 值 ... 115
圖 5.1.30 梁跨 3L/4 處點 7 變位求得之 EI 值 ... 115
圖 5.1.31 彈性模數 E 對時間(齡期)變化 ... 115
圖 5.1.32 識別結果與誤差... 116
圖 5.1.33 識別結果與誤差(一個標準差) ... 116
圖 5.1.34 四分之三跨點 3 之識別結果與誤差... 117
圖 5.1.35 四分之三跨點 7 之識別結果與誤差... 117
圖 5.1.36 梁跨中點敏感性分析結果(點位 5) ... 118
圖 5.1.37 梁四分之三跨處敏感性分析結果(點位 3) ... 118
圖 5.1.38 梁四分之三跨處敏感性分析結果(點位 7) ... 118
圖 5.2.1 拋物線鋼腱配置圖... 119
圖 5.2.2 拋物線 PVC 套管組立情形 ... 119
圖 5.2.3 梁端版模... 120
圖 5.2.4 軸力系統... 120
圖 5.2.5 預力系統... 120
圖 5.2.6 梁跨中位移計... 121
圖 5.2.7 應力應變圖... 121
圖 5.2.8 梁跨中點點位 4 處 12 組試驗對應之誤差分布... 122
圖 5.2.9 梁跨中點點位 5 處 12 組試驗對應之誤差分布... 122
圖 5.2.10 梁跨中點點位 6 處 12 組試驗對應之誤差分布... 122
圖 6.1.1 I 型連續梁縱面圖 ... 134
圖 6.1.2 I 型連續梁斷面圖 ... 134
圖 6.1.3 套管與承壓座... 134
圖 6.1.4 套管配置圖... 135
圖 6.1.5 坍流度試驗... 135
圖 6.1.6 連續梁縱向配筋圖... 135
圖 6.1.7 連續梁配筋剖面圖... 135
XI
圖 6.1.8 鋼筋組立照... 136
圖 6.1.9 試體灌漿及完成照... 136
圖 6.2.1 支承圖... 136
圖 6.2.2 軸力系統... 137
圖 6.2.3 施力介面之橡膠墊... 137
圖 6.2.4 預力系統(施拉端) ... 137
圖 6.2.5 預力系統(非施拉端) ... 138
圖 6.2.6 鋼鉸線配置方式... 138
圖 6.2.7 400 噸荷重計... 138
圖 6.2.8 位移計架設方式... 139
圖 6.2.9 施加集中力梁跨中點位移計... 139
圖 6.2.10 位移計架設位置... 140
圖 6.2.11 梁端支承沉陷變形 ... 140
圖 6.2.12 梁中支承沉陷變形... 140
圖 6.2.13 中間支承下沉對應之等值外力模型... 140
圖 6.2.14 梁端支承下沉對應之等值外力模型... 140
圖 6.3.1 抗壓試驗應力應變圖... 141
圖 6.3.2 預期之連續梁預拱狀態... 142
圖 6.3.3 實際試驗連續梁預拱狀態... 142
圖 6.3.4 梁受力行為變化情形... 142
圖 7.1.1 預力檢測流程圖... 146
XII
表目錄
表 3.1.1 分析所用各項參數... 30
表 3.1.2 分析結果... 31
表 3.1.3 位移取至 0.01MM 程度 ... 32
表 3.1.4 位移取至 0.01MM 程度結果 ... 33
表 3.2.1 連續梁結構條件... 34
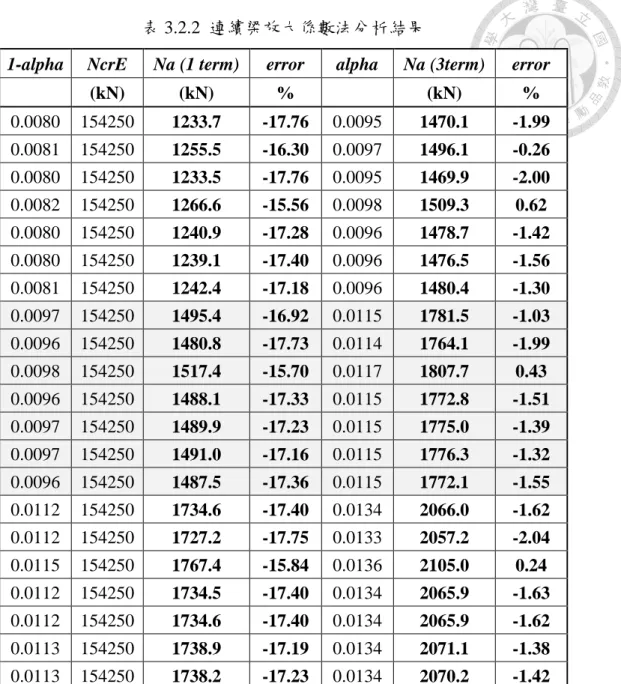
表 3.2.2 連續梁放大係數法分析結果... 35
表 3.2.3 變位值取至小數點後第二位... 36
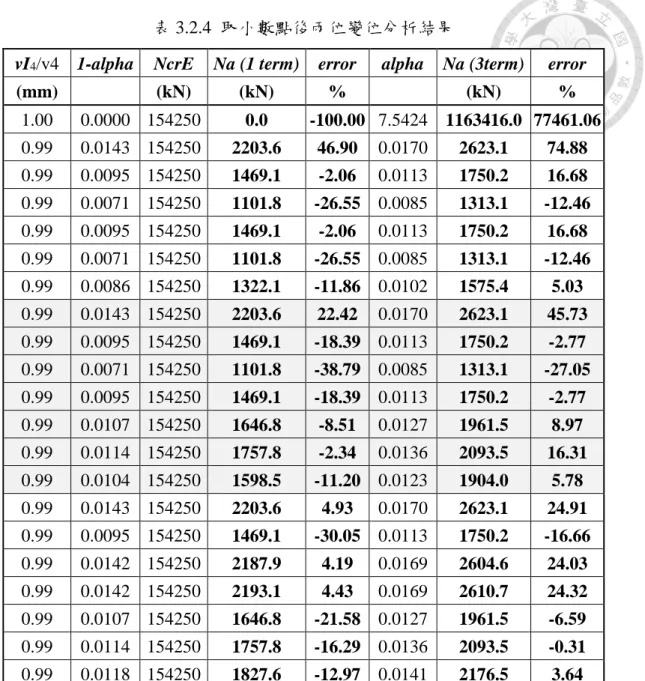
表 3.2.4 取小數點後兩位變位分析結果... 37
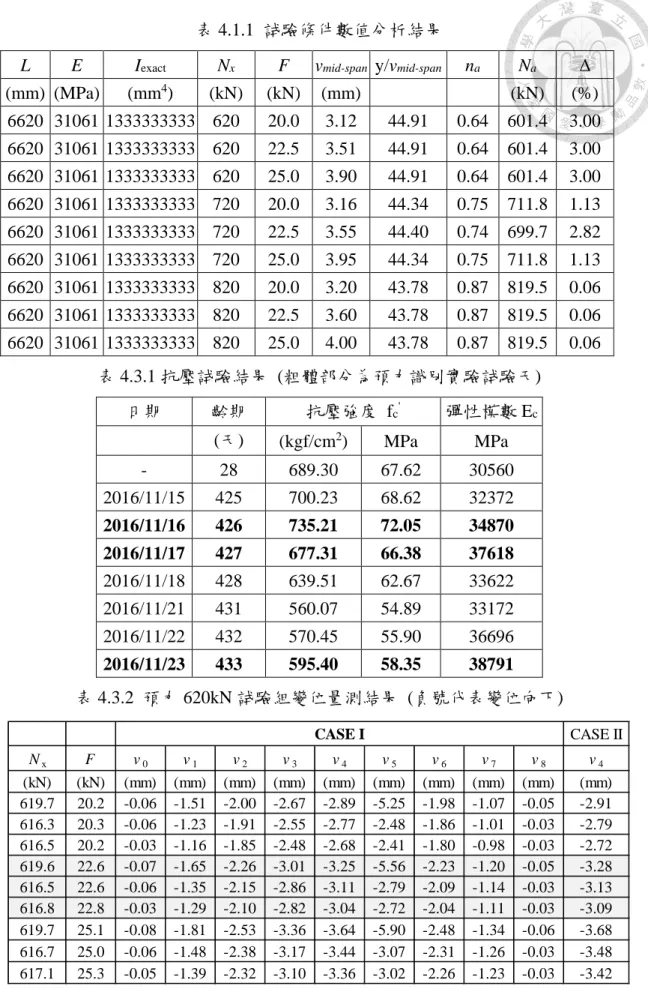
表 4.1.1 試驗條件數值分析結果... 48
表 4.3.1 抗壓試驗結果 (粗體部分為預力識別實驗試驗天) ... 48
表 4.3.2 預力 620KN 試驗組變位量測結果 ... 48
表 4.3.3 預力 720KN 試驗組變位量測結果 ... 49
表 4.3.4 預力 820KN 試驗組變位量測結果 ... 49
4.3.5 預力 620KN 修正後變位結果 ... 50
表 4.3.6 預力 720KN 修正後變位結果 ... 50
表 4.3.7 預力 820KN 修正後變位結果 ... 51
表 4.3.8 預力 620KN 分析值 ... 51
表 4.3.9 預力 720KN 分析值 ... 52
表 4.3.10 預力 820KN 分析值 ... 52
表 4.3.11 625KN 變位誤差比例 ... 53
表 4.3.12 725KN 變位誤差比例 ... 53
表 4.3.13 925KN 變位誤差比例 ... 53
表 4.4.1 梁跨中中點變位分析識別結果... 54
表 4.4.2 誤差平均與標準差... 55
表 4.4.3 四分之一跨處預力識別結果... 55
表 4.4.4 八分之一跨與八分之三跨處部分結果... 56
表 5.1.1 最大橫向力檢核... 91
XIII
表 5.1.3 直線配置變位分析... 91
表 5.1.4 抗壓試驗結果... 92
表 5.1.5 預力 1570KN 中點變位 ... 92
表 5.1.6 預力 1940KN 中點變位 ... 92
表 5.1.7 校正係數比較... 93
表 5.1.8 校正係數比較... 93
表 5.1.9 各荷重計預力記錄與比較... 93
表 5.1.10 規範建議之摩擦係數... 93
表 5.1.11 試驗預力與橫向力 ... 93
表 5.1.12 達開裂彎矩之橫向力... 93
表 5.1.13 試驗識別結果... 94
表 5.1.14 平均值與標準差... 94
表 5.1.15 四分之三跨處識別結果... 95
表 5.1.16 絕對平均誤差... 95
表 5.1.16 預力 1570KN 一階變位與含二階效應變位比較 ... 96
表 5.1.17 預力 1940KN 一階變位與含二階效應變位比較 ... 96
表 5.1.18 預拱量推算預力... 97
表 5.2.1 最大橫向力檢核... 97
表 5.2.2 拋物線配置預拱值... 97
表 5.2.3 拋物線配置變位分析... 98
表 5.2.4 抗壓試驗結果... 98
表 5.2.5 實際試驗施加橫向力組... 98
表 5.2.6 預力 1657KN 變位與比較 ... 99
表 5.2.7 預力 1829KN 變位與比較 ... 99
表 5.2.8 預力 1960KN 變位與比較 ... 100
表 6.1.1 最大橫向力檢核... 131
表 6.1.2 連續梁預拱值... 131
表 6.1.3 連續梁變位分析... 131
表 6.3.1 抗壓試驗結果... 132
XIV
表 6.3.2 各預力加載之預拱值... 132
表 6.3.3 消弭中間支承變位對應之橫向力... 132
表 6.3.4 預力 1444KN 中點修正結果 ... 132
表 6.3.5 預力 1689KN 中點修正結果 ... 133
表 6.3.6 預力 1871KN 中點修正結果 ... 133
1
第一章 緒論
1.1 研究背景
台灣橋梁受到台灣嚴苛的環境條件影響,例如洪颱、高溫多雨、車輛超載等因 素,使得橋梁可能於使用服務年限中受到損害或劣化,進而導致橋梁承載力不足、
服務功能喪失以及損害使用者安全。根據營建署針對北、南、東部分縣市調查得知 台灣大部分市區橋梁以鋼筋混凝土橋與預力鋼筋混凝土橋佔大多數[1],並且由於台 灣多數橋梁橋齡已高以及上述環境因素影響,橋梁的檢測與補強成為一項須要重 視與處理之課題。
預力混凝土梁為台灣橋梁常見型式,然而預力梁可能會由混凝土潛變、鋼鉸線 鬆弛、鋼腱腐蝕、震損等原因造成預力之損失。當預力梁受到傷害或預力損失時,
就極有可能導致橋梁功能喪失,產生重大傷害事件。因此,針對預力梁之現存預力 進行檢測,瞭解現存實際預力與設計預力之間預力損失情形,評估預力混凝土橋梁 狀態與使用性,為維持預力橋梁安全重要工作。過去近幾十年內,許多對於不同預 力損失檢測方法發展出來,如混凝土劣化、鋼腱腐蝕等因素檢測評估,亦有不同學 者提出許多靜態與動態檢測方法,用於檢測構件軸力,如斜張橋鋼索、桁架構件內 力等,部分研究亦探討預力梁軸力檢測方法。
1.2 研究動機與目的
由於橋梁老化耐久性因素,預力梁易受到混凝土乾縮潛變、鋼腱鬆弛等因素造 成預力損失,再加上大部分橋梁為預力梁形式,因此對於瞭解預力梁預力損失程度 或現存預力具有一定重要性以及掌握度,以維護橋梁安全。然而目前大部分預力橋 梁檢測大多專注外部目視檢測,或針對鋼腱腐蝕問題等進行檢測,而對於預力損失 部分,過往大多由長期潛變等因素下進行預力損失的估算,但對實際真正殘存預力 的掌握未必足夠,如此也代表對於預力橋梁安全程度的不確定。而其他較更為深入
2
詳細的預力檢測方式也常為破壞性檢測或透過動態方式等,然如破壞性試驗方法 較難於實際橋梁上應用,可執行性具有一定困難度,因此殘存預力值的檢測較為不 易且繁複。
本論文之研究目的為試著發展出一套藉由簡易不繁瑣的檢測方法,由量測預 力梁變位經過公式反算出梁構件所受之軸向預力,期望盡量透過簡明的非破壞性 檢測方法有效地檢測出現地混凝土預力梁現存之預力,並提出檢測方法有效的範 圍與條件,界定出本研究檢測方法之可行性與適用性。
1.3 研究流程與論文架構
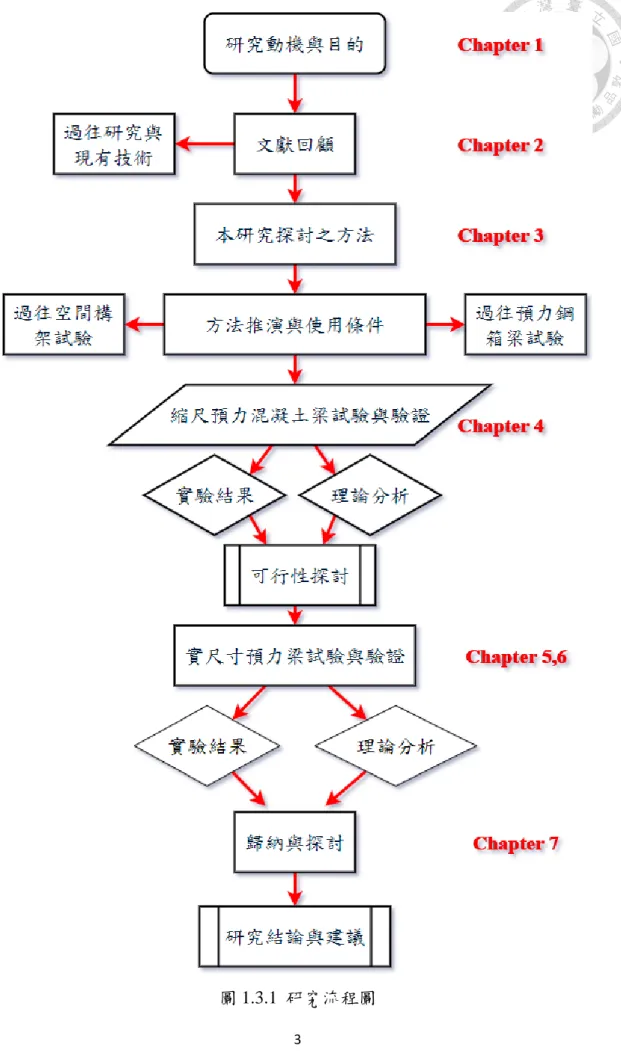
本研究利用所選檢測方法,先瞭解方法公式推導過程及假設條件,確立公式適 用條件,再進行試驗前分析與設計,接著透過混凝土預力梁試驗進行檢測方法可行 性驗證,最後分析歸納檢測方法準確性及適用性。本文第二章為回顧過去學者於結 構構件或預力構件之軸力檢測的理論與方法,以及現有實務預力檢測之技術,討論 相關理論方法與技術的發展,討論各方法面臨的問題與其優缺點,並由此確立本文 研究討論之方法。第三章為針對使用之檢測方法進行詳細闡述,本文方法由結構穩 定學中有關受軸力構件撓度分析中所推演之放大係數法推演而來,本研究參考 Timoshenko 於《彈性穩定理論》書中推演過程,因此檢測方法使用條件須緊扣放 大係數法之假設條件。第四章為利用小尺寸混凝土預力梁進行試驗,檢測預力梁所 承受預力,檢討各條件因素影響,確認本檢測方法之可行性。第五章進一步利用實 尺寸 PCI 梁進行預力檢測試驗,探討本檢測方法應用於實尺寸簡支型式預力梁時 之成效與面臨之問題,本試驗包含直線與拋物線鋼腱案例討論,前者為前一章節延 伸探討,後者為更貼近實際現地情況。第六章探討實尺寸 PCI 梁當支承條件變為 連續梁型式時,初步的試驗結果與現象,以及檢測方法面臨的挑戰。第七章歸納相 關試驗討論檢測方法應用於實尺寸梁之可行性,並嘗試初步界定出研究之檢測方 法的適用範圍與檢測流程,並討論試驗中發現的問題與應用現存橋梁之挑戰以利 今後研究與發展。
3
圖 1.3.1 研究流程圖
4
第二章 文獻回顧
2.1 預力損失劣化特性
混凝土橋梁若屬預力結構系統形式時,須對預力損失劣化於橋梁安全影響有 所瞭解。預力結構系統的預力劣化,可粗略分成材料與力學方面。
材料方面,如一般混凝土構件般,受混凝土潛變或其他不良化學反應造成劣化。
此外,鋼腱之腐蝕是預力系統與其他 RC 系統最大的不同的特徵。導致鋼腱腐蝕常 見的因素有下列幾點。如端錨無密封墊防止水滲入,混凝土潛變、乾縮生成裂縫,
套管品質不良產生滲水等因素,而最常見因素為套管中水泥砂漿的填充不確實或 蜂窩之生成,此因素為最重要讓鋼腱未受到保護,使得鋼腱與滲入水產生作用,導 致腐蝕狀況生成,進而使鋼腱受損及預力損失。如美國 Lowe’s Motor 橋鋼腱腐蝕 造成斷裂[26],事後發現 11 根鋼索皆腐蝕。檢測方式為利用目視檢查混凝土裂縫狀 況以及有無滲水,另有透過超音波方式檢測套管中水泥砂漿及鋼腱腐蝕斷裂狀況,
亦或以軟管式攝影機檢測套管內部。
力學方面有預力鬆弛或疲乏,這會導致鋼腱內預力減少,造成預力梁撓度增加 及減少乘載力,對於使用安全有一定影響。另外,溫度梯度、潛變收縮應變應力重 分配估算過低、鋼腱套管間摩擦力估算過低、套管漂浮等亦會導致預力與預期不同,
為導致撓曲裂縫的主因,使得構件劣化。國內案例如中山高圓山橋,其因為混凝土 之乾縮與潛變較預期來得大,以及鋼腱鬆弛等問題,導致橋梁於梁跨中間鉸點處撓 度變位較預估來得大,影響行車舒適度甚至可能影響使用安全。國外案例如帛琉的 Koror Babelthaup 橋為箱型懸臂式預力梁,其橋梁斷裂原因之一即為對於潛變影響 估算錯誤及預力鋼腱配置不足導致橋梁失敗造成人員傷亡。
綜合而言,與混凝土相關劣化特性,可由一般 RC 相同方式進行檢測處理,而 目前預力系統中預力損失劣化檢測主要著重於鋼腱之腐蝕問題,檢測方式以非破 壞檢測為主,針對構件內部變化進行檢查,以及目視檢查可見之缺失,減少水滲入
5
套管與鋼腱作用形成腐蝕,然亦有方法非以探查腐蝕為預力損失標的,而是試著求 出鋼腱或構件之預力,故以下將對於構件軸向預力檢測之方法進行文獻回顧與介 紹。
2.2 預力構件預力檢測技術
對於預力構件預力檢測,過去亦有眾多學者提出不同方法,嘗試識別受軸力構 件之內力。而這些方法可大約分類成靜態方法與動態方法,靜態方法主要透過位移 來反算構件之軸力,動態方法則由動態試驗求得頻率並搭配有限元素分析,識別出 構件之軸力。此外,目前現地檢測預力梁的技術主要為應力釋放法為概念,由求得 混凝土應力來得到鋼腱預力。以下分為靜態與動態方法,分別回顧過往之方法。
2.2.1 靜態方法
靜態檢測方法主要是將梁或構件施加一個或多個橫向力,並由位移或變形檢 測軸力。Beconcini[2]、Briccoli[3][4]等利用施加向下橫載於梁跨中,由位移與軸向變 形求出拉力和梁端彎矩。而 Rebecchi[5]及 Tullini[6]等提出由三點抗彎試驗中,量測 三個特定點位移,其理論模型為建立在有端部扭轉束制之簡支梁來進行軸力檢測。
此外 Tullini[7]亦提出另一檢測方法,此方法可以應用於任何細長構件,且此方法不 需已知長度及邊界條件下進行軸力檢測,方法理論基於尤拉梁,並且斷面幾何參數 及材料彈性性質為已知參數。此方法檢測時為於梁上施加集中橫向力,並且量測三 點或五點位移,得出構件軸向拉力或壓力,若五點進行位移量測及識別,可獲得較 高精度。
除了上述藉由位移等靜態參數反算構件軸向力等方法外,現今實務對於預力 檢測採用方法亦有下列數種之技術。
(1) 十字弓法
[20][21]十字弓法(crossbow method),此方法由法國發展而出,用於量測鋼鉸線所承受 之內力。此方法首先須將鋼鉸線周圍混凝土、套管、水泥砂漿(填充材)小心地清除,
6
露出至少 60cm 的預力鋼鉸線區域,之後施加一垂直力 F,同時記錄位移量,此拉 起距離為 4mm,如圖 2.2.1 所示,接著即可透過力平衡方式求出鋼鉸線之預力。不 過此方法受摩擦力、撓曲勁度、過度施加之張力等因素影響,因此需在實驗室先進 行相關因素的校正試驗,可由預先製作好之圖表進行查表計算。
十字弓法可應用於內置預力系統的檢測,而針對外置預力系統還可利用鋼鉸 線振動檢測鋼腱預力之方法。然而此方法屬於破壞性檢測,且須刨除混凝土、套管、
填充沙漿並拉起鋼鉸線,實際現地橋梁上對於做這些破壞性動作可能難以執行。
(2) 應力釋放法
[20][21][22]應力釋放法亦稱切槽法,為一種直接量測混凝土應力之方法,由法國發展而來。
此方法於切開混凝土前先量測兩個觀測點距離 d0,其後考量應力方向切出一寬 4mm、深 80mm 槽口後,因應力釋放與壓應力作用,使得兩觀測點距離變為 d1, 此時於槽內塞入扁平式千斤頂(圖 2.2.3),施加壓力使千斤頂將槽口推回至觀測點 距離為原先 d0,當下千斤頂壓力即為混凝土之內壓應力。倘若為拉應力,則將千斤 頂持續加壓,並記錄應力與位移曲線,將所得增量曲線圖外插至位移增量為零處,
對應之應力即為內拉應力,此方法精度取決於對於量測混凝土槽開口距離之精度 大小,但不須知道楊氏模數值為一項特點。
類似方法英國亦有發展,稱作鑽孔法,但鑽孔法精度取決於混凝土的楊氏模數,
但混凝土楊氏模數值變異性較大,因此成為這方法需要研究克服之挑戰。
除了以上介紹應力釋放法程序外,亦有其他同為應力釋放法概念之檢測技術,
只是執行方式上的些許差異。如 The steel stress relief hole technique 方法為於鋼筋 或預力鋼材上鑽直徑約 1.6mm、深 1.6mm 之孔洞,量測應力釋放後孔洞附近的應 變求出內預力值。而此方法缺點為須使鋼材暴露出來,且較適用於小尺寸的預力鋼 鉸線。
Center hole method 亦是應力釋放概念方法,由 Richardson 發展,此方法適用 於較短的鋼間或較剛性之構件。利用 VM strain gauge 於現有結構上鑽 78mm 直徑
7
孔洞,然後將 VM strain gauge 以輻射狀安裝上去進行量測。Owens et al.進一步提 出孔徑較小為 36~52mm,VM strain gauge 輻射狀長 50mm 之方法,透過有限元素 模型發現最理想孔徑大小為 50mm。
Concrete stress relief core method 為亦是混凝土應力釋放的方法,其先鑽心取 樣 50mm 寬、50mm 深之鑽心試體,拿去抗壓試驗求得楊氏模數,而孔洞周圍以十 字方式貼上應變計並求出應變,進而得出內預力值,但此方法於鑽心時會造成混凝 土的應變,因此若混凝土原先內應力很小時,易受此因素干擾造成較大誤差。
Concrete core trepanning method 與上述方法不同處在於,其先將應變計貼於混 凝土中心,然後在其周圍切出圓環,此方法優點為可以完整記錄應變變化過程,記 錄完後則可將混凝土取出做抗壓試驗求出楊氏模數,進而得到應力值。
Osborn 等[26]於 2012 年提出 the crack moment test,此方法為將梁先加壓至裂 縫形成,然後解壓並貼上 crack opening displacement gages,之後再次加壓使裂縫再 次張開,應變計量測之應變所對應之力量即為預力大小。
(3) 電磁法
[21]電磁法可應用於鋼鉸線斷裂與預力值之檢測。其利用磁致伸縮效應特性來進 行(Magnetostrictive effect),因為磁性材料在磁化後會發生形狀與大小改變的物理現 象。同理,若變形的發生會影響通磁能力,產生感應電流,因此若鋼腱發生斷裂,
則可透過電磁法找出該斷裂位置。而鋼腱預力檢測的發展,Washer 等人利用 EMAT 於鋼棒上激發超音波,發現超音波波速隨拉應力增加而下降,余與江於 8m 長鋼腱 上透過壓電式超音波探頭偵測超音波波速,亦發現隨鋼腱拉力增加時,訊號延遲時 間亦延長,因此電磁法也於鋼腱預力檢測發展中。
2.2.2 動態方法
動態檢測方法為利用梁振動測試,由相關動態參數來求得軸向力。過去 Blasi[8]
和 Sorace[9]提出利用靜態參數變形以及動態參數振動頻率來檢測構件軸向力近似 值之方法。Lagomarsino、Calderini[10]提出由前三個模態頻率透過最小化誤差分析的
8
過程,求得梁所受拉力撓屈勁度。Livingston[11]等人透過有限元素模型,選擇最低 二至三個頻率以及其對應之模態當作參數,使用最小二乘法分析作為檢測方法。
Tullini、Laudiero[12]亦提出動態檢測梁軸向力方法,此方法基於尤拉伯努力梁理論 基礎,梁斷面幾何與材料彈性性質均須為已知參數,透過選擇任一自然頻率與其對 應之模態下的三點位移,求取梁在受拉力或壓力下之軸向力以及端點旋轉勁度,於 受壓狀態下,求出端點旋轉勁度後,可由分析求出臨界荷載,得出實驗的安全係數,
然而此方法之準確會受選擇頻率與模態影響檢測精度,於應用上較難有特定流程 進行分析。
針對預力混凝土梁的有效預力值檢測,近年來亦有許多動態檢測方法出現。Lu、
Law[13]透過量測預力混凝土梁的動態反應,利用有限元素模型敏感性值更新步驟的 反算過程求出預力值。Law[14]亦研究尤拉伯努力梁基於模態疊加下外界刺激下時域 響應,利用一系列時域檢測步驟下求出預力值。Li[15]提出利用動態反應敏感性之有 限元素模型,量測車輛移動時橋梁動態反應,分析得到高速公路橋梁預力。
Abraham[16]研究一種利用計算損壞位置技術來檢測混凝土橋梁預力損失之可行性。
Kim[17]通過監測部分自然頻率之改變,利用基於振動方法檢測 PSC 梁之預力損失。
Xuan[18]通過利用光纖傳感器監測技術監測混凝土橋梁之鋼絞線數量,進而檢測預 力損失。Xu 和 Sun[19]利用速率反應敏感性之方法,檢測預力混凝土梁之預力。
2.3 相關試驗研究回顧
Timoshenko、Gere[23]和 Bazant、Cedolin[23]提出由已知軸力與挫屈力下,可以 得到放大係數,並由此放大係數乘上一階變位得到受二階效應下變位,故此方法可 以用於受軸向力之結構構件受外力變形的分析與預估。
Bonopera[25]提出將此公式經過左右項式改寫成放大係數由變位求出,進而由 變位關係求得構件軸力情況,檢測及分析出結構構件軸向力,並針對簡支梁受集中 載重作用條件下進行公式之演變簡化,此方法須已知斷面幾何性質與材料彈性模 數,檢測過程中施加橫向力情況時可獲得較高精準值。
9
Bonopera[25]及樊鵬透過小型鋁製空間構架,於其上佈置質量塊製造均佈荷載,
並由荷重計施加橫向力,並由千分儀量測頂部位移。目的在於探討空間構架柱結構 承受之軸壓力,用以判斷整體結構使否會達到挫屈狀態,作為結構穩定與安全評估 標準。其使用第一個方法為 Southwell 法,通過增加均布載重 q,可以量測到空間 框架的柱結構橫向位移,並代入公式計算得極限分布載重。第二種方法為放大係數 法,來進行識別,結果如圖 2.3.3 所示。第三種方法為 Tullini 提出之方法,該方法 於空間構架識別結果誤差小於 10%。
上述方法亦應用於空間桁架縮尺試驗,透過質量塊施加外加載重於結構終點,
相同地應用 Southwell 法、放大係數法與 Tullini 法等來進行識別計算,圖 2.3.5 為 放大係數法識別結果,透過上述於空間構架與桁架試驗中,驗證此些方法於細長構 架軸力識別具一定良好效果。
同時,也透過縮尺預力梁試驗進行可行性驗證,利用混凝土梁及鋼梁,分別試 驗三組及四組預力,並施加三組側向力,且對於預力梁之強弱軸階進行試驗。並由 位移計及光纖位移傳感器進行位移的量測,而試驗結果顯示檢測結果最好可將誤 差降至 10%左右,因此透過此預力梁試驗表明此方法提供一個有效預力檢測的手 段。而試驗中也嘗試使用具高精度之光纖位移傳感器量測系統量測變位,目的在於 獲得高精度量測結果以利後續預力計算。光纖傳感器系統基於連通管原理、漂浮機 制、光纖材料組成律等,藉由梁變位造成水面變化,改變光纖張力,影響光纖內光 波長,並記錄傳感器內光之波長變化量,進而求出變位。
放大係數法屬靜態方法,只需靜態參數即可,並不像動態方法需挑選出合適之 頻率進行分析,並且量測系統可設置於結構外,不須於結構建造過程中預先安裝量 測儀器,或事後對結構進行破壞性檢測,此方法已於小尺寸預力梁進行可行性研究,
本文將進一步探討於實尺寸預力梁應用的可行性與適用性。
10
圖 2.1.1 Lowe’s Motor 橋 (圖引用參考資料[27])
圖 2.1.2 圓山橋
(圖引用 http://www.ceci.org.tw/book/89/web/26-37)
圖 2.1.3 Koror Babelthaup 橋
(圖引用 https://structurae.net/photos/220888-koror-babeldaob-bridge)
11
圖 2.2.1 十字弓法[21](圖引用參考資料[21])
圖 2.2.2 校正試驗使用之圖表[21](圖引用參考資料[21])
圖 2.2.3 扁平式千斤頂[21](圖引用參考資料[21])
12
圖 2.2.4 切槽法示意圖[21](圖引用參考資料[21])
圖 2.2.5 Concrete stress relief core method (圖引用參考資料[22])
13
圖 2.2.6 Concrete core trepanning method (圖引用參考資料[22])
圖2.3.1 空間框架二之設計圖(左);
空間框架二之試驗配置(右)(圖引用參考資料[24])
圖 2.3.2 空間框架二之試驗配置圖(左)及右柱橫向力施加裝置荷重計(右)
(圖引用參考資料[24])
14
圖 2.3.3 空間框架二柱軸力估計值與量測軸力值之比較與敏感性分析曲線 (圖引用參考資料[24])
圖 2.3.4 空間桁架之試驗配置圖 (圖引用參考資料[24])
圖 2.3.5 空間桁架軸向壓力估計值與量測軸力值之比較與敏感性分析曲線 (圖引用參考資料[24])
0 100 200 300 400
500 Na[N]
0 100 200 300 400 500 Nx- Nx[N]
Simplified F.
Simplified F.
(exp id)
Comparison between the compressive axial loads and Sensitivity analysis functions
RIGHT COLUMN F = 24.5 N
0 100 200 300 400
500 Na[N]
0 100 200 300 400 500 Nx- Nx[N]
Comparison between the compressive axial loads RIGHT COLUMN
F = 24.5 N
-140 -100 -60 -20
Na[N]
-140 -100 -60 -20
Nx+ Nx[N]
F3= 21.6 N
15
圖 2.3.6 預力混凝土梁試體試驗光纖位移傳感器佈置 (圖引用參考資料[24])
圖 2.3.7 預力箱型鋼梁試體強軸試驗實際預力值與預估預力值及敏感性分 析(光纖位移傳感器)
(圖引用參考資料[24])
-500 -400 -300 -200 -100 0
Na[kN]
-500 -400 -300 -200 -100 0 Nx[kN]
Proposed Method (1 point) EI exp Proposed Method (1 point)
EI exp (exp id) STRONG Axis - EI exp
Optical deflection sensor F1= 20.0 kN
-500 -400 -300 -200 -100 0
Na[kN]
-500 -400 -300 -200 -100 0 Nx[kN]
STRONG Axis - EI exp Optical deflection sensor
F2= 22.5 kN
16
第三章 研究方法
在本章將詳細敘述 Timoshenko 針對放大係數法公式的推導,以及公式的改寫 應用於軸力檢測,並延伸討論於簡支梁和連續梁應用時,公式的變化與比較,以及 瞭解使用條件與限制。
3.1 簡支梁撓度應用公式
於 Timoshenko 和 Gere[23]彈性挫屈著作中,其基於 Euler 挫屈理論,透過挫屈 微分方程式解得構件受軸向力時,簡支梁構件中點變位之理論解析解為:
3
3
3(tan u-u) 48
v Ql
EI u
=
(公式 3.1)其中,Q 為作用於梁上集中載重,
l
為梁長,E 為彈性模數,I 為慣性矩,2
cru P
P
=
π ,P 為軸力,P 為挫屈載重。 cr
同時 Timoshenko 等人發現不同邊界條件構件其式子皆可化成一階變位乘上一 係數後得到受 P-δ 效應下之變位。
v = α v
I (公式 3.2) 其中,α:放大係數
因此 Timoshenko 接著以傅立葉級數方式表達受軸向力下構件之變位。首先考 慮簡支梁構件,如圖 3.1.1,梁長為 L。今考慮一橫向集中力 Q 作用於起始之梁端 c 處。
接著以公式 3.3 中傅立葉 sine 級數來表示此簡支梁之變位情況,透過不同項 次 sine 來擬合變位情況,同時因為 sine 級數可以自然滿足邊界條件。
1 2 3
2 3
sin x sin x sin x ...
y a a a
l l l
π π π
= + + +
(公式 3.3)17
其後利用應變能法與虛位移法解得傅立葉 sine 級數的傅立葉係數
a n
,並得出於無軸力下簡支梁受橫向力下之變位方程式:
3
4 4
1
2 1
sin sin
n
n
Ql n c n x
y EI n l l
π π
π
=∞
=
= ∑
(公式 3.4) 其中,
( )
n c
x n
為集中載重作用位置 距梁端 為對應之變位位置
為第 項次
同理亦可解得受軸向力 P 作用下之變位方程式:
3
4 2 2
1
2 1
sin sin
( )
n n
Ql n c n x
y EI n n l l
π π
π α
=∞
=
= ∑ −
(公式 3.5) 其中,2 2
=
cr
cr
P P P EI
l
α=
π得到上述兩公式後,為簡化公式方便使用,將兩條公式皆只取第一個項次進行簡化。
3
0 4
2 Ql sin c sin x
y EI l l
π π
δ = = π
(公式 3.6)3 4
2 1
sin sin (1 )
Ql c x
y EI l l
π π
δ = = π − α
(公式 3.7)其中,
δ
0為一階變位,δ
受二階效應下之變位。倘若更進一步考慮的問題為橫向集中力作用於跨中,求解點(量測點)亦位於跨 中,即
c = x = 𝐿𝐿 2
時對應之變位:3
0 4
y 2Ql
δ
EI= =
π
(公式 3.8)
18
3 4
2 1
(1 ) y Ql
δ
EI
π α
= = −
(公式 3.9)將公式 3.8 與公式 3.9 進行相除,即可得到 Timoshenko 推導之放大係數法之公式,
可由此公式將一階變位乘上放大係數,求出受軸向力下之變位。
0 0
1 1
cr
P P
δ δ
δ α
⇒ = =
− −
(公式 3.10)
其中 1 1
cr
P
− P
為所謂之放大係數。
而公式 3.10 可改寫成公式 3.11。
(1
0) P P
crδ
= − δ
(公式 3.11)其中,P 為挫屈載重,cr
δ
0為一階變位,δ 為包含二階效應之變位。因此由此公式,當掌握挫屈軸力,以及一階變位與含二階效應之變位,即可利用公 式 3.11 求出構件所受軸力值。
由於從公式之推演過程中,知此解為一近似公式,代表公式使用上可能會有系 統誤差之存在,因此須確保近似造成之誤差需在可接受之範圍內,故以下將 Timoshenko 之放大係數公式進一步推演至考慮取三個項次時,所得公式(視為更接 近解析解)與上述公式之差異。
將公式 3.4 以及公式 3.5 考慮至三個項次,可得下列公式:
3 3
0 4 4 4
2 1 2 82
(1+ )= ( ) 3 81
Ql Ql
y EI EI
δ
= =π π
(公式 3.12)3 3
4 2 2 4 2
2 1 1 2 82-10
(1 ) + 3 (3 - ) 81-90 +9
Ql Ql
y EI EI
δ α
α
π α π α α
= = − =
(公式 3.13)19
同樣將兩式進行相除之動作,解得對應之放大係數:
2
0
1- 10 +
9 9
= 5
1- 41 α α δ
δ α
2 2
0 0 0 0 0
0
5 5
10 10 4
- - ( - ) - (1- ) 107584+23616 +2025( )
9 41 41 9 9 45
= =5- -
2 82 82
9
δ δ δ δ δ
δ δ δ δ δ δ
α δ
⇒
(公式 3.14) 若近一步整理公式 3.14,即可得到三個項次所得求軸力之放大係數法公式
2
0 0
0
107584+23616 +2025( ) 5-45 -
82 82
P Pcr
δ δ
δ δ δ
δ
=
(公式 3.15)
得出考慮一個項次與三個項次之公式後,以下將透過數值分析方式探討兩條 公式之差異。首先分析之梁模型尺寸與受力狀況與次章試驗中梁相同,詳細敘述可 見第四章。公式中所需一階變位由勁度矩陣法求解,含二階效應之變位透過考慮二 階效應之精確有限元素法(Exact finite element method)解得。所使用各項參數如表 3.1.1 所示(與後續第四章試驗採用相同分析參數,以利比較)。
將表 3.1.1 中參數帶入公式計算可得表 3.1.2 之結果。由表 3.1.2 結果可知當代 入解析解時,可以求出近似公式的系統誤差,由結果可知取一個項次時誤差約為 1.2%,而當取三個項次時誤差為 0.2%,兩者差 1%。但兩者所得系統誤差對於實際 應用時仍在能接受之程度。接著進一部探討模擬實際量測時受量測精度因素,將位 移值只取至 0.01mm 程度,模擬實際量測可信之位數時對於分析結果之影響,此分 析使用位移呈現於表 3.1.3 結果呈現於表 3.1.4。
由表 3.1.4 結果,首先可先觀察到兩者誤差約在 1~3%之間,而位移誤差或大 或小現象,原因在於位移若只取至 0.01mm 程度時,會因進位因素其值偏離解析值
20
程度與增加或減小因素,以及近似公式本身存在之系統誤差因素,產生部分數值朝 正向貼近無誤差狀態,反之則呈現誤差增加現象。同時亦造成兩公式之差異因此位 數取捨產生模糊化,並無所謂孰準孰不準之言。因此亦證明出只取一個項次之公式 對於實際使用上即有很好表示與檢測能力,無須使用至 3 個項次之公式,且公式 更為簡潔,故對於簡支梁之情況透過公式 3.11 去檢測梁之軸向力更貼近實務使用 之可行性。
(1) 初始變形或偏心軸力情況探討
由前一節推導敘述可知,Timoshenko 之放大係數法公式其推導過程中,對於 位移值之定義皆以梁未受任何外力且呈現完美筆直之狀態下所得。但若將此方法 應用於實際預力混凝土橋梁上勢必遇到一問題,即為現有橋梁已存在一預力值,橋 梁勢必有一變形量,並非呈現當初 Timoshenko 推導之情形。對於此情況,於先前 試驗中提出位移值由預拱後狀態進行起算,故須證明此修改不會造成使用上誤用。
對於預力梁可視其預力偏心軸力可以移至中性軸位置,並加上偏心引致彎矩,
故可將此彎矩之造成變位視為初始變位。因此問題即形成探討有初始變位之非完 美筆直梁之問題。
首先探討偏心軸力問題,今考慮一簡支梁受到外力分布力 p 及梁端彎矩 M1和 M2,引致變形為 z0(x),對應內彎矩力為 M0(x),如圖 3.1.2 (a),接著引入一軸力 P,
變形為 z(x),彎矩內力為 M(x)=M0(x)-Pz(x),如圖 3.1.2(b)所示。而又知 M=EIz”,
因此:
0
0
2 0
M Pz EIz z P z
EI M EIz
M EI z k z M
EI
− = ′′
⇒ ′′ + =
= ′′
⇒
′′
⇒ + =
(公式 3.16)
由公式 3.16 知,偏心軸力引致之梁端彎矩可視為受軸力前之外力來考慮,並將此 受軸力前外力造成變形視為初始變形。接著進一步探討初始變位問題,考慮一有初
21
始變位 z0(x)之簡支梁,如圖 3.1.3 所示。
接著同樣引入軸力 P,其會更進一步產生變位
ω
,而內力彎矩平衡知 M=-Pz,因此:
2
0 0
( )
M = EI ω ′′ = EI z ′′ − z ′′ = − Pz ⇒ z ′′ + k z = z ′′
(公式 3.17) 又因
0 0
M = EIz′′
故
2
M
0z k z
′′ + = EI
(公式 3.18)
所以由上述推導可知縱使有為掌握初始變位,仍可透過受軸力後之變位獲得同樣 之微分方程式結果,指不必知道 z(x),知道ω 即可描述此問題。
3.2 連續梁撓度應用公式
於實際橋梁應用上,除了簡支梁型式之外,亦常見連續梁型式之預力混凝土橋 梁,因此本節將針對應用於連續梁時,放大係數法的推導與使用,並探討相關公式 應用的討論與比較。
考慮如圖 3.2.1 一由一個鉸支承與二個滾支承組成之預力連續梁,此梁為兩等 跨距之雙跨橋梁,並考慮一集中載重施加於其中一跨之跨中。
針對此梁問題時,嘗試將梁化簡為更簡單之結構形式,因此討論專注於施加集 中載重之跨單元上,即將原結構化簡為一簡支梁受到集中載重及梁端彎矩,梁端彎 矩為等效原結構的固端束制彎矩,化簡後結構形式如圖 3.2.2 所示。化簡過後之結 構受到兩種外力,分別為側向力 Q 與梁端彎矩 M,而根據疊加原理,分別探討此 兩種外力下推導的放大係數公式,之後再將其進行疊加獲得此結構條件之放大係 數法。
首先,受側向力之情況下,如圖 3.2.3,而此情況為 3.1.1 節探討之簡支梁。故
22
對應之一階變位與考慮二階效應之變位為公式 3.4 與公式 3.5:
一階變位:
3
0 4 4
1
2 1
sin sin
n n
Ql n c n x
y EI n l l
π π
δ π
=∞
=
= = ∑
(公式 3.4) 考慮二階效應變位:
3
4 2 2
1
2 1
sin sin
( )
n n
Ql n c n x
y EI n n l l
π π
δ π α
=∞
=
= = ∑ −
(公式 3.5) 接著當受梁端彎矩之結構如圖 3.2.4 所示。梁端彎矩之情況公式推導為透過將 集中載重視為作用於極靠近梁端時狀況(具梁端極小距離 c),即為
Qc = M
,同時sin n c n c
l l
π = π
,將此條件代入集中力推導出公式(公式 3.4 及公式 3.5),可整理得下列梁端彎矩作用時公式:
一階變位:
2
0 3 3
1
2 1
sin
n n
Ml n x
y EI n l
δ π
π
=∞
=
= = ∑
(公式 3.19) 考慮二階效應之變位:
2
3 2
1
2 1
( ) sin
n n
Ml n x
y EI n n l
δ π
π α
=∞
=
= = ∑ −
(公式 3.20) 於 Timoshenko[23]彈性穩定理論中推導說明,由於小應變條件及公式中變位與 外側向力 Q 關係,可知公式滿足疊加原理使用條件,即使有數個側向外力作用於 受壓桿件上,故可由疊加原理將上述所得之公式 3.4 與公式 3.19、公式 3.5 與公式 3.20 進行疊加分別得到下列公式:
一階變位:
3 2
0 4 4 3 3
1 1
2 1 2 1
sin sin sin
n n
n n
Ql n c n x Ml n x
y EI n l l EI n l
π π π
δ π π
=∞ =∞
= =
= = ∑ + ∑
(公式 3.21)
23
考慮二階效應之變位:
3 2
4 2 2 3 2
1 1
2 1 2 1
sin sin sin
( ) ( )
n n
n n
Ql n c n x Ml n x
y EI n n l l EI n n l
π π π
δ π α π α
=∞ =∞
= =
= = +
− −
∑ ∑
(公式 3.22) 接著進一步考慮當集中載重作用於跨中以及量測觀測點亦位於跨中,也就是式中
/ 2, / 2
c=l x=l 時,上述公式可代入整理為:
一階變位:
3 2
0 4 4 3 3
1 1
2 1 2 1
sin sin sin
2 2 2
n n
n n
Ql n n Ml n
EI n EI n
π π π
δ π π
=∞ =∞
= =
= ∑ + ∑
(公式 3.23)考慮二階效應變位:
3 2
4 2 2 3 2
1 1
2 1 2 1
sin sin sin
2 2 2
( ) ( )
n n
n n
Ql n n Ml n
EI n n EI n n
π π π
δ π α π α
=∞ =∞
= =
= +
− −
∑ ∑
(公式 3.24)與之前簡支梁同樣做法,分別討論取一個項次與取三個項次時公式近似程度 差異。故將公式 3.23 與公式 3.24 取一個項次時。分別化簡成公式 3.25 與公式 3.26。
3 2
0 4 3
2 Ql 2 Ml
EI EI
δ = π + π
(公式 3.25)3 2
4 3
2 1 2 1
1 1
Ql Ml
EI EI
δ = π − α + π − α
(公式 3.26)同樣做法將兩式進行相除動作,整理之後發現連續梁單跨變位之放大係數法 公式與先前簡支梁取一個項次時公式一致,若同理去化簡不同觀測點位對應之公 式,亦得相同之結果,故依據此推導過程之放大係數法公式取一個項次時,公式最 終形態皆為此形式。
0 0 0
1 1 P P
cr(1 )
δ α α δ δ
δ δ δ
⇒ = − ⇒ = − ⇒ = −
24
若考慮取三個項次時公式可整理成如下:
3 2 3 2
0 4 4 3 4 4 3
2 1 2 1 2 82 2 26
(1 ) (1 ) ( ) ( )
81 27
3 3
Ql Ml Ql Ml
EI EI EI EI
δ
=π
+ +π
− =π
+π
(公式 3.27)3 2
4 3
3 2
4 2 3 2
2 1 1 2 1 1
1 9(9 ) 1 3(9 )
2 82 10 2 26 2
81 90 9 27 30 3
Ql Ml
EI EI
Ql Ml
EI EI
δ π α α π α α
α α
π α α π α α
= − + − + − − −
− −
= − + + − +
(公式 3.28)
同樣將兩式相除並展開。
3 2
4 3
0
3 2
4 2 3 2
2 82 2 26
( ) ( )
81 27
2 82 10 2 26 2
81 90 9 27 30 3
Ql Ml
EI EI
Ql Ml
EI EI
δ π π
δ α α
π α α π α α
+
= − − + + − − +
⇓
2 3 4
0 0
2 3 4
0 0 2 0
2106 2214 4680 4920 2106 2214 +3068 520 26 9676 1640 82
+ +2502 2730 414
3 3 3
Ql Ql Ql
M M M M M M
Ql Ql Ql
M Ql M
δ δ
α α α α α
π π δ π δ
α α α δ δ δ
π π π α α α
δ π δ δ
+ − − − − − +
+ − + −
3 0 2 0 3 0
18 546Ql 30Ql 0
M
α δ α δ α δ
δ π δ π δ
+ − + =
解
得上式符合討論結構行為之α 值。
0 0
27 410 390 45 3 A
2(39 41 )
M Ql M Q
M Ql
δ δ
δ π δ
α
π
− − + +
= −
+
其中:
2 0 2 2 0 2 0 2 0
2
2 0 2 2 0
A = 81 ( ) 3744 ( ) 10816 270 ( ) 6432 ( )
68224 107584( )
225( ) ( ) 2624( ) ( )
3 9
Ql Ql
M M M M M
Ql Ql
M Ql Ql
δ δ δ δ
δ δ π δ π δ
δ δ
π π
π δ π δ
+ + + +
+ + + +
25
公式中梁端彎矩 M 與集中力 Q 關係透過傾角變位法考慮圖 3.2.5 結構解得
33 L
128 M = Q
,將此關係代入求得之α 中改寫。
改寫結果如下:
0 0
891 12870 5760 +192B+52480 2(1287 -5248)
δ δ
π π
δ δ
α π
− −
= −
其中:
2 0 0 2
0 0
2 0 2
2
0 2
127413 ( ) 4455 ( )
10496( )-23452 -6633 ( ) -
128 16
B =
88209 ( )
184041 430336
+ +900( ) + +
64 4096 9
δ δ
π π
δ π π δ δ δ
δ δ
π δ δ
π δ
δ
+
將 alpha 中軸向力與挫屈力關係展開可得公式 3.29,此公式即為取三個項次之連續 梁放大係數法公式。
0 0
891 12870 5760 +192B+52480 2(1287 -5248)
P P
crδ δ
π π
δ δ
π
− −
= × −
(公式 3.29)
其中:
2 0 0 2
0 0
2 0 2
2
2 0
127413 ( ) 4455 ( )
10496( )-23452 -6633 ( ) -
128 16
B =
88209 ( )
184041 430336
+ +900( ) + +
64 4096 9
δ δ
π π
δ π π δ δ δ
δ δ
π δ
π δ δ
δ
+
根據上述推導過程,分別得到連續梁取一個項次與三個項次對應的公式,亦仿 照簡支梁情形,將精確解位移分別代入公式中,觀察公式存在之系統誤差大小與比 較。設定的連續梁結構條件如表 3.2.1 所示,一階變位值由勁度矩陣法求得,含二 階效應之變位由精確有限元素法(exact finite element method)求得。
26
將上述結構條件代入分析之公式可分別得到兩種公式存在之近似誤差。計算 結果於表 3.2.2 所示。由分析結果可知當取一個項次時放大係數法公式會存在約 17%之近似誤差,與之前簡支梁相比增加許多,而取三個項次之公式其近似誤差約 1~2%,明顯地項次提升有效地降低近似誤差。當為連續梁結構時取一個項次近似 誤差較簡支梁近似誤差大,原因在於使用的放大係數法推導為由傅立葉 sin 級數去 擬合梁的變形,故一個項次對應的形態為半個 sin 函數去擬合,對於簡支梁變形以 半個 sin 函數去擬合時是已經足夠的,然而對連續梁受到旁跨之彎矩束制影響,其 單跨變位將變的不是對稱形態,只以一個半個 sin 函數擬合是不足夠的,需要更多 不同形式的 sin 函數來疊加擬合。這也就是一個項次下連續梁較簡之梁有更大近似 誤差原因,也是三個項次比一個項次公式近似誤差更小之原因。
然而一般試驗儀器量測理想精度可信位數大多至 0.01mm 程度,故將上述分析 所用變位取至 0.01mm 程度進行分析,以模擬試驗量測分析結果。一階變位值與含 二階效應變位值如表 3.2.3 所示。
接著將表 3.2.3 之變位代入公式求得兩個公式對應的放大係數與分析值比較,
結果列於表 3.2.4。從表 3.2.4 可發現當變位位數取至小數點後兩位時,取一個項次 與取三個項次公式結果兩者並無太大差異,原先近似誤差 17%與 1~2%的狀況消失,
也就是兩者計算結果被模糊化了,原因在於將變位取至小數點後兩位這個動作,使 得此值有趨向真值(精確值,位數較多情形)或偏離真值狀況,也就使得識別結果有 好有壞。舉例而言,取三個項次時近似誤差較小,也就是較接近精確解,反之取一 個項次時近似誤差較大,故當取至小數點後兩位這動作後的變位值趨近真值,代表 取三個項次的結果會較好,當偏離真值時極有可能取一個項次之結果較好,從表中 可觀察出此現象。然此討論為基於試驗量測精度考量,試驗中位移計精度約在 0.01mm,故才針對變位取至小數點後第二位討論,但由此分析可見得當量測精度 至小數點後第二位層級時,兩個公式計算近似誤差被模糊化,因此在此條件下兩者 分析計算結果至差不多的,若更進一步考慮工程上使用,雖兩者都可由寫好之程式