國 立 交 通 大 學
機械工程學系
碩士論文
適用 AlGaN/GaN HEMT 功率電晶體的兩種驅動電路設計
Two Gate Driver Designs for AlGaN/GaN HEMT
Power Transistors
研 究 生 : 黃士維
指導教授 : 陳宗麟 博士
適用 AlGaN/GaN HEMT 功率電晶體的兩種驅動電路設計
Two Gate Driver Designs for AlGaN/GaN HEMT
Power Transistors
研 究 生:黃士維 Student:Shih-wei Huang
指導教授:陳宗麟 博士 Advisor:Dr. Tsung-Lin Chen
國 立 交 通 大 學
機 械 工 程 學 系
碩 士 論 文
A Thesis
Submitted to Department of Mechanical Engineering College of Engineering
National Chiao Tung University in Partial Fulfillment of the Requirements
for the Degree of Master of Science
in
Mechanical Engineering June 2012
Hsinchu, Taiwan, Republic of China
中 華 民 國 一 零 一 年 六 月
適用 AlGaN/GaN HEMT 功率電晶體的兩種驅動電路設計
學生:黃士維 指導教授:陳宗麟
國立交通大學機械工程學系 碩士班
中文摘要
本論文針對操作於高電壓下的氮化鎵功率電晶體提出兩種驅動電路設計。一 個完整開關電路包含上橋開關電路及下橋開關電路,為了提升開關電路的性能, 上橋的功率電晶體採用 N 型電晶體,此作法使得上橋的功率電晶體的源極成為 浮動電壓,進而使得上橋驅動電路更為複雜。另外,一般功率電晶體為增強型 (enhancement mode),而氮化鎵電晶體為空乏型(depletion mode),因此傳統的 驅動電路設計無法直接應用於氮化鎵功率電晶體的驅動。 在上橋驅動電路中,其控制輸入為一具邏輯位準的輸入電壓,其輸出為一具 備控制功率電晶體的高電壓,因此必須藉由「電位位準轉換電路」來將邏輯位準 的電壓轉成高電壓。也由於此功能需求,傳統的「電位位準轉換電路」中的電晶 體必須能承受高的電壓差,例如採用高壓製程所生產的 LDMOS 來製作電位位準 轉換電路。本論文所提出的第一種驅動電路設計的特點在於採用電容來承受高電 壓差,因此相關的電晶體不需承受高電壓差,可由一般 IC 製程來製作,藉此降 低驅動電路的製作成本。 氮化鎵電晶體的特性與其電壓崩潰機制與閘極漏電流密切相關。本論文所提 出的第二種驅動電路的設計特點在於在驅動電路中包含電流限制電路來限制閘 極漏電流,並進而提升氮化鎵電晶體的崩潰電壓。 此兩種驅動電路皆透過 SPICE 模擬,並完成實驗驗證。在第一種驅動電路 設計中,我們成功製作 24V、10kHz 的上橋驅動電路,實驗證明驅動電路中的 電晶體皆不需承受高電壓差。在第二種驅動電路設計中,我們完成限流電路的設 計與製作,並實驗證明具備限流功能。惟氮化鎵電晶體的崩潰電壓提升有限,僅 10V 左右。Two Gate Driver Designs for AlGaN/GaN HEMT
Power Transistors
Student: Shih-wei Huang Advisor: Dr. Tsung-Lin Chen Department of Mechanical Engineering National Chaio Tung University
Abstract
This study proposes two gate driver designs for the AlGaN/GaN HEMT power transistors. A full bridge power control circuit consists of a high-side bridge and low-side bridge. And, in order to improve the performance, the power transistor in the high-side bridge is N-type. This would make the source of the power transistor floating and complicate the high-side gate driver design. Besides, most of the gate driver circuits are designed for the enhancement mode power transistors. However, the AlGaN/GaN HEMTs are depletion mode transistors. Thus, the conventional gate driver designs cannot be directly applied to drive the AlGaN/GaN HEMT.
The power transistor in the upper bridge controls the on/off of a high voltage (hundreds of volts). And, its control signals are in the level of logic signals. Therefore, a “level shifter” is needed to convert the logic level signal to a high-voltage level signal. This implies that the transistors in the level sifter must sustain a large voltage difference. Usually, these transistors, such as LDMOS, are fabricated from high-end process and thus expensive. In our first gate driver design, we use capacitance to sustain the high voltage and thus the transistors can be exempted from the high voltage. This can greatly reduce the fabrication cost of the transistors and the high-side gate driver circuit.
One of the unique properties of the AlGaN/GaN HEMT is that its breakdown voltage is closely related to the gate leakage current. Therefore, in our second gate driver design, we include a “current limiter” to constraint the gate leakage current and to boost the breakdown voltage of the AlGaN/GaN HEMT.
Both gate driver circuits are designed and simulated using SPICE, and then verified by experimental results. In the first gate driver design, the experimental results show that it can work at 24V, 10kHz. And, no large voltage drop on transistors. In the second gate driver design, the proposed circuit successfully limits the gate leakage current. However, the increase of the breakdown voltage of AlGaN/GaN HEMT is quite limited to 10V.
致謝
本論文能順利完成,首先要感謝指導教授 陳宗麟老師這些日子的細心教導, 使我在研究的過程中,不但學習到相關專業知識以及技術上的應用,更能了解如 何去面對各種問題並培養解決問題的能力。同時感謝博士班學長 許齡元對研究 與課業上的指導以及 蔡俊胤學長對找工作方面的幫忙;感謝張哲維學長在我開 始接觸電路給了我很大的幫助;感謝張正暘學長、吳健彰學長、李泓輝同學在我 實驗遇到難題的時候給予我協助;也感謝其他的同學以及學弟妹們在艱困的研究 之路上相互扶持與砥礪。 最後要將本論文獻給父親 黃英濱與母親 陳玲蘭,感謝他們多年來付出的辛 勞,提供最好的學習環境與資源,讓我能無後顧之憂地往學術與未來的道路上持 續前進,在此獻上最誠摯之謝意。目錄
中文摘要
... Ⅰ
英文摘要
... Ⅱ
致謝
... III
目錄
... IV
圖表目錄
... VⅡ
數學符號
... X
第一章 緒論
... 1
1.1 研究動機與目的 ... 1
1.2 閘極驅動電路運用 ... 2
1.3 AlGaN/GaN 功率電晶體崩潰電壓機制 ... 6
1.4 GaN HEMT 優勢與應用 ... 9
1.5 文獻回顧 ... 11
1.6 論文章節組織與安排 ... 11
第二章 基本閘極驅動電路設計理論
... 12
2.1 閘極驅動電路簡介 ... 12
2.2 下橋閘極驅動電路介紹 ... 13
2.3 上橋閘極驅動電路介紹 ... 14
2.3.1 自舉式電路與電位位準轉換電路 ... 15 2.3.2 光耦合器 ... 192.4 空乏型閘極驅動電路介紹 ... 21
第三章 功率電晶體閘極驅動電路設計實現
... 26
3.1 Si 電晶體和 AlGaN/GaN 電晶體在設計上的差異性 ... 26
3.2 下橋閘極驅動電路 ... 26
3.3 不使用高崩潰電壓元件之加強型上橋驅動電路 ... 29
3.3.1 改良加強型上橋驅動電路 ... 29 3.3.2 加強型上橋驅動電路之 Hspice 模擬結果 ... 36 3.3.3 加強型上橋驅動電路實驗結果 ... 373.4 空乏型上橋驅動電路設計 ... 40
3.4.1 使用負電壓源之啟動電路設計 ... 42 3.4.2 使用正電壓源之啟動電路設計 ... 43 3.4.3 空乏型上橋驅動電路之 Hspice 模擬結果 ... 48 3.4.4 空乏型上橋驅動電路實驗結果 ... 49第四章 提升氮化鎵電晶體崩潰電壓之驅動電路
... 50
4.1 漏電流對崩潰電壓之影響 ... 50
4.2 限制電流之電路 ... 51
4.3 限制電流之電路 Hspice 模擬結果 ... 59
4.4 實際元件量測與電路實驗結果 ... 60
第五章 結論與未來計畫
... 66
5.1 結論 ... 66
5.2 未來計劃 ... 67
參考文獻
... 68
圖表目錄
圖 1.1 現今電力能源使用效率 ... 2 圖 1.2 傳統升壓式轉換器 ... 3 圖 1.3 傳統降壓式轉換器 ... 3 圖 1.4 升壓轉換器電壓與電流對時間關係圖 ... 4 圖 1.5 閘極驅動電路運用在升壓式轉換器架構 ... 4 圖 1.6 閘極驅動電路運用在降壓式轉換器架構 ... 5 圖 1.7 傳統三相變頻器電路 ... 5 圖 1.8 AlGaN/GaN 為導通電荷分佈情形 ... 6 圖 1.9 AlGaN/GaN 為關閉電荷分佈情形 ... 7 圖 1.10 不同 VGS 所導致不同的接面崩潰 ... 8 圖 1.11 各種材料的崩潰電壓 ... 9圖 1.12 矽和氮化鎵電晶體的 raise time & fall time 比較 ... 10
圖 2.1 圖騰式驅動電路 ... 13 圖 2.2 上橋 P 通道驅動電路 ... 14 圖 2.3 自舉式電路 ... 15 圖 2.3(a) Cboot電容充電階段 ... 16 圖 2.3(b) 開關 MN 為導通階段 ... 17 圖 2.4 電位位準轉換電路 ... 18 圖 2.4(a) Cboot電容充電階段 ... 18 圖 2.4(b) 輸出電壓 Out 為零 ... 19 圖 2.5 光耦合器構造圖 ... 20 圖 2.6 光耦合器及其驅動電路 ... 20 圖 2.7 JFET/MOSFET 複合式加強型元件 ... 21 圖 2.8 下橋空乏型驅動電路 ... 22 圖 2.9 上橋空乏型驅動電路 ... 23 圖 2.9(a) 電容 C1 充電階段,開關 MH 為導通 ... 24 圖 2.9(b) 開關 MH 為關閉,輸出電壓 Vout 為零 ... 24 圖 3.1 正電壓控制之下橋空乏型驅動電路 ... 27 圖 3.1(a) 開關 ML 導通階段 ... 28 圖 3.1(b) 開關 ML 關閉階段 ... 28
圖 3.2 參考論文(Low power CMOS level shifters by bootstrapping technique)之電路 ... 29
圖 3.2(a) 開關 MP3 關閉,輸出電壓為零 ... 30
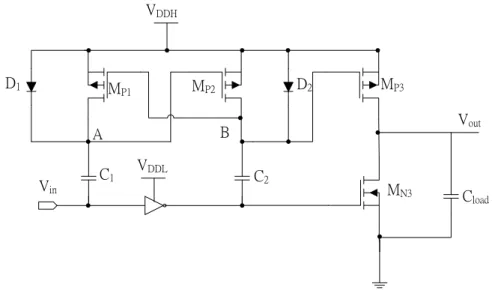
圖 3.3 本論文之電路架構 ... 32
圖 3.3(a) 初始狀態:對自舉式電容 Cboot充電 ... 33
圖 3.3(b) 電晶體 MH 關閉,輸出電壓 Vout為零 ... 34
圖 3.3(c) 電晶體 MH 導通,輸出電壓 Vout 為 VD ... 35
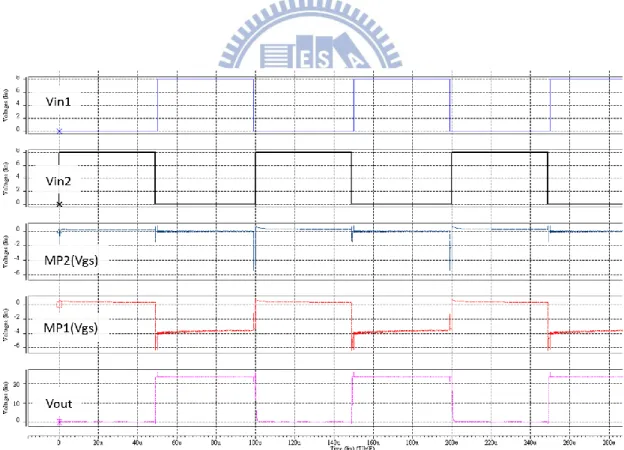
圖 3.4 HSPICE 模擬:Vin1、Vin2、MP2(VGS)、MP1(VGS)、Vout電壓變化圖 36 圖 3.5 HSPICE 模擬:VA、VB、VC1、VC2、Vtop 電壓變化圖 ... 37
圖 3.6 Altium Designer layout ... 38
圖 3.7 加強型上橋驅動電路實驗之電路 ... 38 圖 3.8 加強型驅動電路實際量測之波形圖 ... 39 圖 3.9 氮化鎵上橋驅動電路示意圖 ... 40 圖 3.10 氮化鎵上橋驅動電路圖 ... 41 圖 3.11 負電壓源之啟動電路 ... 42 圖 3.12 正電壓源之啟動電路 ... 43 圖 3.12(a) 初始狀態:電晶體 MH 導通,輸出電壓為 VD ... 44 圖 3.12(b) 啟動電路運作階段:使自舉電容 Cboot能夠充電 ... 45 圖 3.12(c) 電晶體 MH 完全導通,輸出電壓 Vout 為 VD ... 46 圖 3.12(d) 電晶體 MH 關閉,輸出電壓 Vout 為零 ... 47
圖 3.13 HSPICE 模擬:輸入電壓 Vin1、輸入電壓 Vin2、啟動電壓 Vstart、電晶 體 MH(VGS)、輸出電壓 Vout電壓變化圖 ... 48
圖 3.14 HSPICE 模擬:A 點電壓 VA、B 點電壓 VB、電容 C1 跨壓 VC1、電容 C2 跨壓 VC2、Vtop電壓變化圖 ... 48 圖 3.15 GaN HEMT 閘極驅動電路實驗結果 ... 49 圖 4.1 各極間的漏電流和 Vds 的關係圖 ... 51 圖 4.2 GaN 電晶體驅動電路 ... 51 圖 4.3 電流限制電路設計一 ... 52 圖 4.4 電流限制電路設計二 ... 54 圖 4.4(a) 驅動電晶體 MGaN 正常導通,限流電路不運作 ... 54 圖 4.4(b-1) 開關 M3 導通,使 MGaN 閘極能快速放電 ... 55 圖 4.4(b-2) 開關 M3 關閉,限流電路開始運作 ... 55 圖 4.5 電流限制電路設計三 ... 56 圖 4.5(a) 驅動電晶體 MGaN 正常導通,限流電路不運作 ... 57 圖 4.5(b-1) 開關 M3 導通,電阻 RG 短路,使 MGaN 閘極能快速放電 ... 58 圖 4.5(b-2) 開關 M3 關閉,開關 Madd 關閉,限流電路開始運作 ... 58 圖 4.6 限流電路:輸出電壓 Vout、閘極電壓 Vgate、電晶體 M3(Vgs)、電晶體 Madd(Vgs)、輸入電壓 In ... 59
圖 4.7 限流電路直流分析:輸入電壓 In、電晶體 MGaN 閘極電壓 Vgate、開 關 M3(Vgs)、開關 Madd(Vgs)、閘極漏電流 ig ... 60
圖 4.8(b) 交通大學大自行研發元件 ... 60
圖 4.9 崩潰電壓量測示意圖 ... 61
圖 4.10(a) IG_VD 曲線圖:上到下依序是沒限制任何閘極漏電流曲線、限制 閘極漏電流 260uA、限制閘極漏電流 280uA、限制閘極漏電流 300uA、輸出 電壓 Vout 電壓變化圖 ... 61
圖 4.10(b) ID_VD 曲線圖:上到下依序是沒限制任何閘極漏電流曲線、限制 閘極漏電流 260uA、限制閘極漏電流 280uA、限制閘極漏電流 300uA .. 62
圖 4.10(c) IS_VD 曲線圖:上到下依序是沒限制任何閘極漏電流曲線、限制 閘極漏電流 260uA、限制閘極漏電流 280uA、限制閘極漏電流 300uA ... 62
圖 4.11(a) IG_VD 曲線圖:上到下依序是沒限制任何閘極漏電流曲線、限制 閘極漏電流 50uA、限制閘極漏電流 60uA、限制閘極漏電流 80uA ... 63
圖 4.11(b) ID_VD 曲線圖:上到下依序是沒限制任何閘極漏電流曲線、限制 閘極漏電流 50uA、限制閘極漏電流 60uA、限制閘極漏電流 80uA ... 63
圖 4.11(c) IS_VD 曲線圖:上到下依序是沒限制任何閘極漏電流曲線、限制 閘極漏電流 50uA、限制閘極漏電流 60uA、限制閘極漏電流 80uA ... 64
圖 4.12 閘極漏電流 IG 和閘極電壓 VG 的關係圖 ... 65
圖 4.13 不同閘極電壓下的 ID_VD 曲線圖 ... 65
表 1 加強型驅動電路各參數值 ... 39
數學符號
變數符號
M𝐺𝑎𝑁:
GaN 材質之電晶體 M𝑁:
N 型電晶體 Mp:
P 型電晶體 V𝑡ℎ𝑁:
N 型電晶體導通所需電壓 V𝑡ℎP:
P 型電晶體導通所需電壓 V𝐷𝐷:
被驅動電晶體汲極電壓 V𝐷, V𝐶𝐶:
外加電壓 V𝐼𝑛1:
控制訊號 1,為方波輸入 V𝐼𝑛2:
控制訊號 2,為方波輸入 C𝑏𝑜𝑜𝑡:
自舉式電容C
𝑖𝑛:
電晶體寄生電容R
𝑔:
電晶體寄生電阻V
𝑖𝑛:
驅動電路輸入控制訊號 Q1, Q2, M1, M2:
電晶體v
𝑔:
閘極電壓v
𝐷:
汲極電壓變數符號
Vgs:
電晶體閘極-源極電壓差 VSD:
電晶體源極-汲極電壓差 Vtop:
電路最上層之電壓 GND:
電路接地端t
:
時間i
:
電流值 V𝐷𝐷𝐻:
電壓為高電位 V𝐷𝐷L:
電壓為低電位 VB:
B 點電壓 VA:
A 點電壓 C1, 𝐶2:
外加電容 D1, D2:
二極體 d𝑏1, 𝑑𝑏2 :電晶體之 body diode VOut : 輸出電壓 RO : 輸出電阻 VBV:
電晶體崩潰電壓第一章
緒論
本篇論文針對 GaN HEMT 電晶體操作在高功率下,設計出一組不需額外加 入 LDMOS 製程之閘極驅動電路,以及一組提升電晶體的崩潰電壓的保護電路, 使元件能節省製作成本和提高操作電壓。 本 章 節將 依 序介 紹: 1.1 研 究動 機 與目 的 1.2 閘 極驅 動 電路 運用 1.3 AlGaN/GaN 功率電晶體崩潰電壓機制 1.4 GaN HEMT 優勢與應用 1.5 文獻回顧 1.6 論文章節組織與安排1.1 研究動機與目的
隨著科技的發展,能源的需求愈來愈大,但是天然能源卻愈來愈少,除了發 展替代及再生能源之外,提高能源的使用效率也是重要的課題,其中又以電力的 節省最為重要。因為電力易於傳輸和易於控制等特性,其應用比其他能源更為廣 泛,所以電力在能源消耗上往往占了很大的比例,像是歐盟諸國約為 40%,美國 和日本則約為 41%,在未來石油等化石能源短缺的情況下,電力的使用比例只會 愈來愈增加。 然而現今的電力應用,處處顯現浪費的跡象,圖 1.1 是各應用面的效率統計, 也就是電力使用效率有很大改善空間。歐盟研究機構估算,其區域內的 25 國, 到 2020 年,若能改善電力使用效率以減少 30%耗電用量相當於 115 大型火力電 廠的發電量,對環境保護效能是很可觀的,在中短期內,電力使用的節省,遠比 再生能源的應用更有立竿見影之效,電力電子能明顯提升馬達驅動及電力轉換等 效能,是提升電力使用效率的重要技術。圖 1.1 現今電力能源使用效率 近年來功率元件發展之趨勢在於「智慧型高效能整合性功率模組之開發」, 其目的在於針對特定應用範疇,開發出符合該項應用之專用功率控制模組,甚至 將所有驅動功能、保護電路甚至診斷單元集成在單一功率晶片模組上,以期達到 高效能,高穩定性之要求,更重要的是讓系統應用工程師在設計時只需針對系統 上層需求做規劃設計,不須對各別元件之效能與安全性做浩瀚繁瑣之細部電路設 計,就算針對個別元件進行鉅細靡遺的後續細部電路設計,有時還是無法避免應 用上之盲點與障礙,因為可能的瓶頸有時是在於功率元件本身結構先天之缺陷, 如果沒有在晶片集成上做硬體驅動及製程的整合提出最佳化之解決方案,後天的 補償也是有限且低效益的。 其次,傳統高電壓功率裝置是採用矽 MOSEFT 架構。然而,多數應用在材 料上已經達到極限。由於氮化鎵裝置是基於 AlGaN/GaN 高電子遷移率電晶體 (high-electron mobility transistor);HEMT 具有優越切換特質與高電場的操作能力, 能夠在功率轉換解決方案帶來革命性的改進。因此,以 AlGaN/GaN 為主的各型 功率轉換器的開發已屬於一刻不容緩的議題,尤其是在大功率式電源轉換器的應 用,提高電源轉換器效率,對綠能的目標將有絕大的助益。
1.2 閘極驅動電路運用
本論文設計的半橋型閘極驅動電路可運用在以下兩種電路當中:(a)直流轉 換器(DC-DC converter),(b)變頻器(inverter)。(a)直流轉換器
此電路提供直流輸入以及直流輸出,當在一般電路運作時,輸入直流電壓太 高或太低無法達到電路運作的需求,需使用此直流轉換器將電壓調整到需要的輸 出電壓上,直流轉換器又可分為升壓式轉換器(如圖 1.2)和降壓式轉換器兩種(如 圖 1.3)。 Vin L S C R D 圖 1.2 傳統升壓式轉換器 Vin L S C R D 圖 1.3 傳統降壓式轉換器 以傳統升壓式轉換器為例,當開關 S 導通時,輸入電壓 Vin 將會對電感 L 儲存能量;接著將開關 S 關閉,則電感會將原本儲存的能量輸出,並藉由電感的 伏秒平衡(Volt-second balance)特性,我們可以得到下式: V𝑖𝑛 𝑜𝑛 ( 𝑖𝑛 𝑜 𝑡) 𝑜 (1.1) 並將上式整理可得:V𝑜 𝑡 𝑖𝑛 𝑜 (1.2) 其中 T 為圖 1.4 中,一次完整的開關循環週期,D 則是一次完整的開關循環週期 中開關導通所佔的時間比例(t )。由於 D 永遠小於 1,因此V 將永遠大於 1,輸 出電壓將比輸入電壓高。 圖 1.4 升壓轉換器電壓與電流對時間關係圖 在實際應用上,一般直流轉換器使用 Si-IGBT 為開關元件,而本論文設計之 驅動電路因使用 GaN HEMT 作為元件,其的能源效率遠高於 Si-IGBT (導通電阻 為 Si-IGBT 之 1/10),且 GaN HEMT 的開關速度遠高於 Si-IGBT 為(為 Si-IGBT 之 10 倍),其可大幅降低被動元件尺寸,使電路體積縮小化,圖 1.5 以及圖 1.6 為使用本論文的驅動的電路架構。 DC Gate driver High side MOS L Low side MOS C R 圖 1.5 閘極驅動電路運用在升壓式轉換器架構
DC Gate driver High side MOS L Low side MOS C R 圖 1.6 閘極驅動電路運用在降壓式轉換器架構
(b)變頻器
電路操作在輸入直流電壓,輸出交流電壓,需使用到變頻器把直流電轉交流 電,此作法廣泛運用在馬達驅動電路上,圖 1.7 為傳統三相變頻器電路連接至三 相負載的圖,其中共有三組半橋電路,分別為 M1、M2;M3、M4;M5、M6, 所以共需三組閘極驅動電路控制。 DC High side M1 High side M3 High side M5 Low sideM2 Low side M4 Low side
M6 Z Van Vbn Vcn n
Gate driver
圖 1.7 傳統三相變頻器電路1.3 AlGaN/GaN 功率電晶體崩潰電壓機制
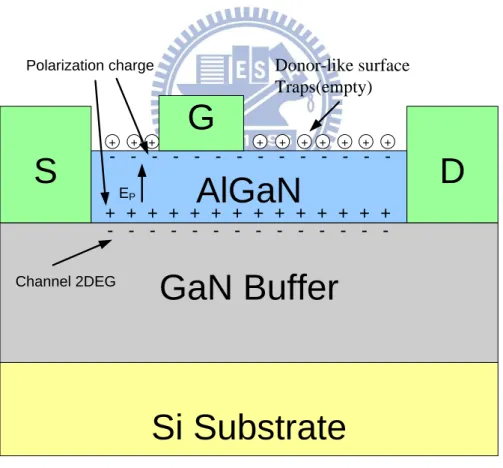
AlGaN/GaN HEMT 電晶體材質和一般市面上最常見的 Si 材質的功率電晶體 不同點為 AlGaN/GaN HEMT 傳輸通道是靠二維電子雲所形成,不需要靠任何的 摻雜就可形成 2DEG(2-D electron gas)層,電子傳輸是在 AlGaN/GaN 異質通道接 面處所產生的二維電子雲,電子在通道中是靠強大的極化電場在 AlGaN 所感應 出表面類施體(donor-like)[1][2]和表面空缺陷(trap)遺留正電荷所造成,2DEG 濃 度可在沒有任何內部摻雜的情況下可達 1×1013 ~4×1013 cm-2,圖 1.8 為 AlGaN/GaN 導通狀態(on-state)的電荷分佈情形。
Si Substrate
GaN Buffer
S
D
AlGaN
G
-+ -+ -+ -+ -+ -+ -+ -+ -+ -+ -+ -+ -+ -+ -+ + + + + + + + + + Channel 2DEG EPPolarization charge Donor-like surface Traps(empty)
元件的關閉狀態(off-state)可參考圖 1.9,AlGaN/GaN HEMT 操作在閘極偏壓 在截止(pinch-off)、汲極偏壓為正,電子會從閘極注入到表面 traps,表面的 traps 會被電子注入所填滿,通道內電荷以垂直式空乏以保持元件內部電中性。
Si Substrate
GaN Buffer
S
D
G
-+ -+ + + + + + + + + + + + -+ + -Channel 2DEGPolarization charge Donor-like surface
Traps(filled) VGS VDS e - - - -Depletion + + + + + + + + + + + + + EP + -- - -
-AlGaN
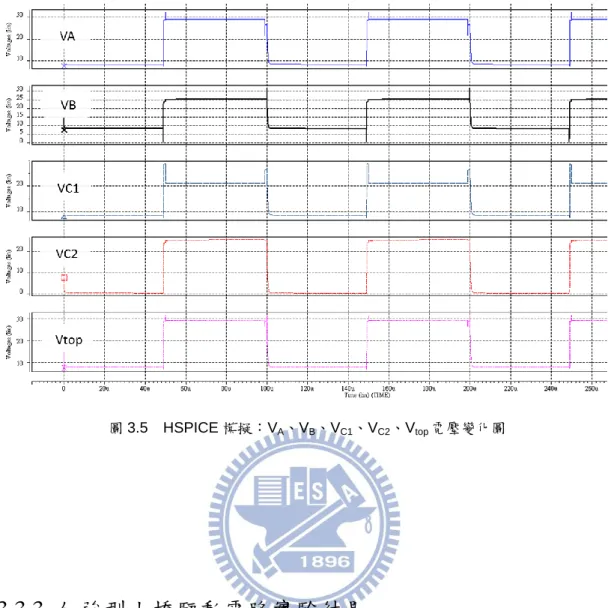
Charge injection 圖 1.9 AlGaN/GaN 為關閉電荷分佈情形 一般而言 AlGaN/GaN HEMT 崩潰電壓的定義為:在電晶體關閉情況下汲極 漏電流達 1mA/mm 時的汲極電壓,而不同 VGS的大小會使 AlGaN/GaN HEMT 功圖 1.10 不同 VGS所導致不同的接面崩潰
(1) 汲-閘極崩潰
當 VGS 輸入的跨壓較小,汲極電壓達崩潰電壓,閘極電場不足以阻止 Depletion 區通過的電流,大部分的漏電流將直接流到閘極造成電晶體損毀[4], 在此圖中約為-15V~-10V,而 VDS電壓為 50V~60V 之間,VDG電位差變化小(在 圖中 VDS_VGS曲線幾乎為正比關係),汲極電流急遽上升(從 10~60uA/mm),此現 象為汲-閘極崩潰。(2) 汲-源極崩潰
當 VGS 輸入的跨壓較大,汲極電壓達崩潰電壓,電流直接往下貫穿 GaN Buffer 從 Si Substrate 流出,在此圖中約為-7V~-4V,而 VDS電壓為 50V~60V 之 間,因 VDS 在相同的電壓下,汲極電流急遽上升(從 10~80uA/mm),此現象為汲 -源極崩潰。 本論文藉由設計限制閘極漏電流電路進而延後汲極-閘極崩潰的發生,將在 第四章有詳細討論。1.4 GaN HEMT 優勢與應用
目前功率元件以 GaN HEMT 電晶體為主要發展目標,主要是因為此新興材 料有以下優勢:(1)具有寬能隙,(2) 電子遷移率高、低內阻、低輸入電容,(3) 較高的導熱性 (1) 具有寬能隙 此半導體材料的晶體為六角型 wurtize 的結構,此結構的特性就是寬能隙 (bandgap
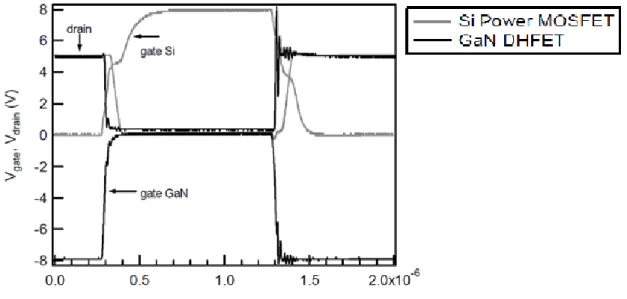
)較大,也就是說,需要很大的能量才能產生自由電子使其離子化,也 因此可以得到較大的崩潰電壓(圖 1.11)和能操作在高溫的環境下。 圖 1.11 各種材料的崩潰電壓 (2) 電子遷移率高、低內阻、低輸入電容 此特性使氮化鎵電晶體應用在閘極驅動電路的效果將會比一般的電晶體更 好。如圖 1.12,可以看到在同樣的脈衝波輸入之下,以氮化鎵為材料的電晶體在 開關切換時的時間只要一般電晶體的五分之一倍。圖 1.12 矽和氮化鎵電晶體的 raise time & fall time 比較
(3) 較高的導熱性
在實際應用上可使元件散熱較佳,更不容易燒壞。
在技術發展上,與 GaN 同列為新興功率電力電子元件材料的還有 SiC。 Baliga 性能係數(Baliga’s Figure of Merit, BFOM)顯示 GaN 還優於 SiC,若採用 GaN on Si 磊晶,雖會略犧牲磊晶品質,但預測及實驗證實元件特性可達到與 SiC 相當的程度,但有成本低於 SiC 的優勢。 目前可實際應用在無線通訊的 RF,可開發無電流、高電壓與低電阻的下一 代功率電子零組件;而潛在應用市場包含:在太陽能轉換器內之高功率切換、 AC-DC 功率轉換、DC-DC 功率轉換、馬達驅動、照明、高密度音效與混合電 汽車或切換模式的電源供應器。
1.5 文獻回顧
在一般閘極驅動電路的部分,2002 年 S. C. Tan 和 X. W. Sun [5] 發表一閘極 驅動電路改良一般驅動電路耗能問題,在輸入電壓為 5V,輸出電壓為 12V 的操 作下,至少比一般的驅動電路節省 50%的功率耗損,2007 年 Y.-J. Woo, G.-H. Cho and G.-H. Cho [6] 運用在升壓轉換器的驅動電路做改善,2010 年 Yan-Ming Li, Chang-Bao Wen 等人[7]改良降壓式轉換器,但以一般的 SiC 電晶體作為驅動元件 已經不足以應付更高功率以及高效能的需求,所以 2007 年 Torregrosa[8]發展 AlGaN/GaN 大訊號模型並包含溫度效應。Jardel[9]探討 AlGaN/GaN 於開關應用 中產生非線性效應並提出模型。Nomura[10] 將 AlGaN/GaN 應用於半橋架構並 討論晶體開關特性與溫度效應。Saito[11] 應用於電壓上升(boost)轉換器,其功率 為 120W。國際整流器公司(International Rectifier,簡稱 IR)於 2008 宣布成功開 發革命性氮化鎵 (GaN) 功率元件技術平台,但關於 AlGaN/GaN 晶體應用相關 論文能仍在元件特性與較簡單功率轉換器應用中。
1.6 論文章節組織與安排
本篇論文針對高功率電路設計出驅動控制電路並根據 GaN HEMT 電晶體特 性設計提升崩潰電壓的保護電路,論文共包含五個章節,第一章節介紹研究動機 與文獻回顧。第二章節介紹電晶體閘極驅動電路設計理論。第三章節介紹功率電 晶體閘極驅動電路設計實現。第四章節介紹提升氮化鎵電晶體崩潰電壓之電路。 第五章將本論文歸納整理後做出結論,並對未來發展做進一步探討。第二章
電晶體閘極驅動電路設計理論
控制器產生的 PWM 訊號需要經由閘極驅動電路來推動功率元件,在小功 率應用中,會使用單極共地驅動電路。而中高功率應用中,其驅動電路的架構分 別有半橋、全橋等開關方式,且扮演著保護控制器的腳色。本章節一開始會簡介 閘極驅動電路的主要功能和分類,然後介紹基本的上下橋閘極驅動電路。最後會 討論空乏型電晶體的驅動方式並討論這些方式的優缺點,以利於設計出適合的氮 化鎵閘極驅動電路。本章節將依序介紹:2.1 閘極驅動電路簡介 2.2 下橋閘極驅 動電路介紹 2.3 上橋閘極驅動電路介紹 2.4 空乏型閘極驅動電路介紹2.1 閘極驅動電路簡介
驅動電路為控制電路和功率開關之間的界面電路,主要的功能就是能正確切 換功率元件的導通與截止狀態,並在元件導通時提供適當的驅動電力(如 BJT 的基極電流或 MOSFET 的閘極電壓)使其維持在導通的狀態。 一般而言,功率電晶體可分為上橋和下橋,下橋元件因為其源極接地,電壓 固定為 0V 而易於控制,其驅動電路也較上橋單純。上橋元件在選擇上有 P 通 道和 N 通道兩種,P 通道元件雖然控制簡單,但在成本和性能的表現上皆不如 N 通道元件,所以應用上還是以 N 通道元件為主,但是 N 通道元件的源極電壓 並非定值造成控制上的困難,需要仰賴適當的閘極驅動電路穩定提供閘極電壓。 目前發展出許多不同的驅動方式,較常見的有自舉式驅動電路(Bootstrap Circuit)、 光耦合器(Photo-coupler)等。2.2 下橋閘極驅動電路介紹
要切換功率元件,最簡單的方式就是直接用 PWM(Pulse Width Modulation) 控制器產生的邏輯訊號作切換,這種方式的優點為便宜和節省空間,但是 PWM 控制器所能提供的驅動電流有限,會限制功率元件的切換速度。而且過大的電流 尖波(Current Spike)也容易破壞控制器內較敏感的電氣元件。為了提升功率開 關的切換速度和保護控制器等目的,使用上仍會添加驅動電路來做驅動。 圖 2.1 是一般常見的圖騰式(Totem-pole)驅動電路,(a)是由一個 NPN 和 一個 PNP 電晶體組成的 BJT 型式的驅動電路,(b)則是由 NMOS 和 PMOS 組 合而成。此兩種圖騰式驅動電路的功能及操作方法極為類似,最大的不同為 BJT 型式的驅動電路其輸入和輸出訊號同相,而 MOSFET 型式的驅動電路則為反向。 在切換功率元件導通或者關閉的過程中,圖騰式驅動電路能提供一個低阻抗的路 徑使驅動電流更大,進而提升元件的切換速度,且驅動電流並不會流進 PWM 控 制器內,避免控制器內的電器元件受到損害,達到保護的作用[12]。 VCC GND Vout Vin
(a)
VCC GND Vout Vin(b)
圖 2.1 圖騰式驅動電路 BJT 圖騰式電路的另一個好處為兩個電晶體的基極-射極接面可以互相保 護,避免接面二極體的反向崩潰現象(Reverse Breakdown)。且基極-射極接面二極體可以限制功率元件的閘極電壓在 Vcc + VBE 和 GND-VBE 之間,避免過高 的閘極電壓導致功率元件損壞。不過需要注意不能讓 BJT 電晶體進入到飽和狀 態,否則會降低切換速度。與 BJT 圖騰式驅動電路相比,MOSFET 因為材料特 性而更適合操作在高頻。且在功率元件閘極電壓的控制上,因為 BJT 基極-射 極接面造成的電壓降 VBE 使其不如 MOSFET 圖騰式電路來的準確,這也是 MOSFET 圖騰式電路被較多人作為驅動電路的原因。
2.3 上橋閘極驅動電路介紹
上橋驅動電路依照功率元件的型式不同可以分為 P 通道驅動電路和 N 通 道驅動電路。由於 P 通道功率元件的源極與電壓源 VD 相連接使其電壓值固定 不變,所以操作上也較為簡單。 R1 R2 Q1 VIN D1 RG VDLevel Shifter
Z 圖 2.2 上橋 P 通道驅動電路圖 2.2 為簡單的 P 通道閘極驅動電路[13],由電晶體 Q1 和兩個電阻 R1、 R2 組成一位準轉換電路(Level Shifter),目的就是提供一個相對於源極的負電 壓訊號將功率元件導通。而二極體 D1 的作用在於防止功率元件的閘-源極電壓 差(VGS)過大使元件損壞。此電路的功率損耗主要在上橋元件的輸入電容和 Q1 導通時流過 Level Shifter 的電流上。 在一般高效率、大功率的系統應用中,仍會採用性能較佳且價格也較便宜的 N 通道元件作為上橋功率電晶體,但是該功率元件的源極為浮動電壓,無法直 接用一固定的閘極電壓來進行開關控制,以下將介紹兩種常見的解決方法。
2.3.1 自舉式電路與電位位準轉換電路
圖 2.3 所示為一個簡單的自舉式上橋閘極驅動電路[12][14][15],用以驅動增 強型 N 通道功率電晶體 MN。為了解決 MN的源極電壓不固定的問題,添加一自 舉電容 Cboot 作為浮動的電壓源使用,讓 MN閘極電壓能隨著源極電壓一起改變。 VCC VD Ro Cboot M1 M2 MN Vout Dboot In 圖 2.3 自舉式電路此自舉式上橋閘極驅動電路的工作原理如下: (a) 第一階段:輸入電位 In 為高電位 Vh 開關 M1 為關閉,開關 M2 為導通, VCC 對電容 Cboot 充電,此時電容 Cboot 的負端(即 MN 之源極電壓)電壓為零,正端電壓為 VCC,當開關 MN的閘 -源極電壓 VGS 為零,開關 MN 為關閉 ,第一階段等效電路圖如圖 2.3(a)所 示。 VCC VD Ro Cboot M1 M2 MN Vout Dboot Vh 圖 2.3(a) Cboot電容充電階段 (b) 第二階段:輸入電位 In 為低電位 Vl 開關 M1 為導通,開關 M2 為關閉時,開關 MN之 VGS 即為 VCC 使其導通, 其等效電路圖如圖 2.3(b-1)所示。
在開關 MN為導通過程中,其源極電壓也隨之上升到 VD,此時電容 Cboot 跨 壓因為二極體 Dboot 逆偏的關係,幾乎維持不變,其正端電壓約為 VDD+VCC, 可提供 MN 穩定的 VGS,使其得以持續導通,等效電路圖如圖 2.3(b-2)所示。 VCC VD Ro Cboot M1 M2 MN Vout Dboot Vl VCC VD Ro Cboot M1 M2 MN Vout Dboot Vl
(b-1)
(b-2)
圖 2.3(b-1)、(b-2) 開關 MN為導通階段 (c) 第三階段:輸入電位 In 回到高電位 Vh 開關 M1 為關閉、開關 M2 為導通,開關 MN 之 VGS 為零,使開關 MN為關 閉,回到第一階段。 使用自舉式電路作法的困難點在於如何讓開關 M1 為關閉以及開關 M2 為導 通,因為此時 M2 的源極電壓已經是 VD(高電壓位準),因此必須藉由一個 level shifter 將控制訊號的邏輯位準提升至 VD 位準,方能將開關 M1 為關閉以及開關 M2 為導通,如圖 2.4 所示。VD MP2 MP1 MN1 MN2 In Out gnd A 圖 2.4 電位位準轉換電路 一般的電位位準轉換電路,工作原理舉例如下: (a) 第一階段:輸入電位 In 為低電位 Vl 開關 MN1為關閉,開關 MN2為導通,電壓 Out 被拉到零,開關 MP1為導通,A 點電壓為 VD,開關 MP2為關閉,如圖 2.4(a)所示。 VD MP2 MP1 MN1 MN2 Vl Out gnd A 圖 2.4(a) 輸出電壓 Out 為零
(b) 第二階段:輸入電位 In 為高電位 Vh 開關 MN1為導通,開關 MN2為關閉,A 點電壓被拉到零,開關 MP1為關閉,開 關 MP2為導通,電壓 Out 被拉到 VD。 VD MP2 MP1 MN1 MN2 Vh Out gnd A 圖 2.4(b) 輸出電壓 Out 為 VD 由以上的例子可得知電位位準轉換電路跨接於 VD 位準與 0V 中間,因此電 位位準轉換電路內的元件 MN1、MN2、MP1、MP2必須要能承受高電壓差。例如使
用 LDMOS(Laterally double diffused MOS)代替一般的 MOSFET。然而製作 LDMOS 或是其它具高崩潰電壓電晶體需要特殊的製程,製作上較為複雜,本論 文根據這點對電路做改良,詳細內容在第三章討論。
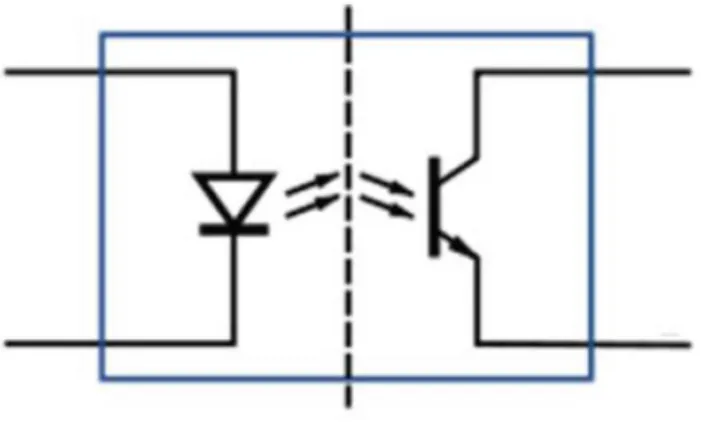
2.3.2 光耦合器
圖 2.5 中方框的部分即為光耦合器[16],一般由三部分組成,分別是光的發 射、光的接收及信號放大。輸入的電信訊號驅動發光二極體,使其發出一定波長 的光,被光探測器接收後產生電流輸出,完成電-光-電的轉換。由於光耦合器 輸入輸出間互相隔離,電信訊號的傳輸具有單向性特點,因此具有良好的電絕緣 能力和抗干擾能力,所以也可以在長線傳輸資訊中作為終端隔離元件。圖 2.5 光耦合器構造圖
圖 2.6 所示, PWM 控制器的輸出接腳需串連一個電阻 R1 做為限流用, 避免電流過大造成發光二極體毀壞,另外在光耦合輸出側加上一電阻 RG 可以 控制驅動速度的快慢。
2.4 空乏型閘極驅動電路介紹
空乏型電晶體與加強型電晶體的不同在於其臨界電壓(Threshold Voltage, Vth)為負值,所以當 VGS 為零時電晶體導通;VGS 為負值時電晶體關閉。為 了驅動空乏型電晶體,可以利用一 MOSFET 與高效能之空乏型元件結合,使之 成為一複合式的加強型元件(如圖 2.7),如此便可利用現有的加強型電晶體驅動 技術來進行元件開關控制[17]。但是這種作法會增加功率元件的導通電阻使效能 降低,且操作溫度也會被 MOSFET 限制而無法提升。在保有材料優勢的情況下, 本文將介紹二種下橋空乏型驅動電路和一種上橋空乏型驅動電路[18]。 圖 2.7 JFET/MOSFET 複合式加強型元件下橋空乏型驅動電路
如圖 2.8,此驅動電路是由一個 NMOS 和一個 PMOS 組成圖騰式的電路架 構,其操作方式也與加強型驅動電路相同,不同之處在於電路之中的 PMOS 源 極由 VCC 改為接地(GND),而原本 NMOS 的源極也由接地改為連接負的電 壓源 VSS。當開關 M1 為導通、開關 M2 為關閉時,VGS 約為零使電晶體 ML 導通;當開關 M1 為關閉、開關 M2 為導通時便藉由 VSS 提供負的電壓來關閉 空乏型電晶體,在設計上只需要符合|VSS| > |Vth|此一關係式即可。此驅動電路有兩個需要解決的問題,其一是要額外設計電路以提供負電壓源;其二是 PWM 控制器的邏輯訊號為正,無法直接控制此驅動電路,需要添加 Level Shifter 將正 訊號轉為負訊號。 Vout Vin Rg Rload VD VSS M1 M2 Vgs + -ML 圖 2.8 下橋空乏型驅動電路
上橋空乏型驅動電路
圖 2.9 為上橋閘極驅動電路,其架構與加強型的自舉式電路非常類似,都是 利用自舉電容來提供閘極需要的電壓。圖中電容 C1、二極體 D1 和浮動電壓源 VCC 形成新的空乏型自舉式電路,有別於加強型的自舉電容是在功率電晶體關 閉時被充電,此電路的充電時機則在功率電晶體導通時。Vout In Rg Rload VD C1 D1 VCC M1 M2 MH Level shifter 圖 2.9 上橋空乏型驅動電路 其操作原理如下: (a) 第一階段:輸入電位 In 為低電位 Vl 開關 M1 導通、開關 M2 關閉時,電晶體 MH 的 VGS 為零使其導通並使 Vout 電壓(電容 C1 的正端電壓)被拉到 VD,此時電容 C1 的負端電壓約等於 VD-VCC,VD 則藉由電容 C1、二極體 D1、VCC 形成的迴路對電容 C1 充 電,所以當電容 C1 被充飽時其跨壓會約等於 VCC,如圖 2.9(a)所示。
Vout Vl Rg Rload VD C1 D1 VCC M1 M2 MH Level shifter 圖 2.9(a) 電容 C1 充電階段,開關 MH 為導通 (b) 第二階段:輸入電位 In 為高電位 Vl 開關 M1 關閉、開關 M2 導通時,電晶體 MH 的閘極電壓約為-VCC 而被關 閉,其源極電壓會下降至零,這段過程空乏形元件的閘極電壓藉由電容 C1 維 持在-VCC,使其持續關閉。當 Vout 電壓為零時,電容 C1 的負端電壓會低 於零,約為-VCC,如圖 2.9(b)所示。 Vout Vh Rg Rload VD C1 D1 VCC M1 M2 MH Level shifter 圖 2.9(b) 開關 MH 為關閉,輸出電壓 Vout 為零
此作法雖可以解決空乏型電晶體上橋驅動的問題,但是在實際應用上會有困 難,最大的問題就在於需要額外提供電壓源,除了要設計 VCC 這個浮動電壓源 之外,當自舉電容 C1 的負端,也就是 M2 的源極電壓為負的時候,M2 的閘極 電壓也要為負才可關閉,所以還要另外設計出產生負電壓源的電路,且在 M1 和 M2 的切換上也無法直接使用正訊號作控制,增加其實現的困難度,本論文將在 第三章詳細介紹如何將電路改良成可直接使用正訊號控制,並且也不必設計負電 壓源電路。
第三章
功率電晶體閘極驅動電路設計實現
本章節將驅動電路分成上橋電路以及下橋電路討論,下橋驅動電路是使用 AlGaN/GaN 電晶體來作為驅動對象,上橋則是先使用一般 Si 材質之加強型電晶 體作為驅動對象,最後改為 AlGaN/GaN 材質之空乏型電晶體,並分別以 hspice 模擬與電路實作驗證。 本章節將依序介紹:3.1 Si 電晶體和 AlGaN/GaN 電晶體在設計上的差異性 3.2 下橋驅動電路 3.3 不使用高崩潰電壓元件之加強型上橋驅動電路 3.4 空乏型 上橋驅動電路設計3.1 Si 電晶體和 AlGaN/GaN 電晶體在設計上的差異性
由於本論文並不是使用一般的 Si 材質之 Power MOS 來當作電晶體材料,而 是使用 AlGaN/GaN 來作為電晶體之材質,這兩種材質在運作上最大的不同就是 Si 材質之 MOS 是加強型之電晶體,需要在閘極加入一個正伏特的電壓 Vth才能 使汲極-源極導通,而沒加電壓則會使之關閉;AlGaN/GaN 材質之 MOS 是空乏 型之電晶體,在閘極不需要加入任何電壓就會使汲極-源極導通,反而需要加入 一負電壓 Vth才能使其關閉,基本操作方法在第二章已詳細介紹過。3.2 下橋閘極驅動電路
本論文使用 AlGaN/GaN 電晶體當下橋主要開關,因 GaN 電晶體是空乏型電 晶體,符合第二章第四節的介紹,但第二章介紹的下橋驅動電路(圖 2.8)需要額外加入負電壓源 VSS,且控制訊號 Vin 也需要負電壓控制,不符合實際運用情形, 圖 3.1 為改良後之空乏型電晶體的閘極驅動電路。開關 M1 和開關 M2 同樣組 合成圖騰式架構,但是在電晶體閘極之前添加了電容 C1 和二極體 D1,用以提 供負的 VGS 使電晶體關閉。 Vout Vin Rg Rload VD VCC C1 D1 M1 M2 ML Vgs + -圖 3.1 正電壓控制之下橋空乏型驅動電路 其操作方式如下: (a) 第一階段:輸入電位 Vin 為低電位 Vl 開關 M1 導通,開關 M2 關閉,VCC 經由開關 M1、電容 C1、二極體 D1 形成 的迴路對電容 C1 充電,使其跨壓約等於 VCC,此時電容 C1 的負端電壓趨近 於零使功率電晶體 ML導通,如圖 3.1(a)所示。
Vout Vl Rg Rload VD VCC C1 D1 M1 M2 ML Vgs + -圖 3.1(a) 開關 ML 導通階段 (b) 第二階段:輸入電位 Vin 為高電位 Vh 開關 M1 為關閉、開關 M2 為導通,電容 C1 的正端電壓被拉到零,因為電容 C1 兩端電壓差使電晶體 ML 的閘極電壓為-VCC 而將功率電晶體關閉,如圖 2.9(b) 所示。 Vout Vh Rg Rload VD VCC C1 D1 M1 M2 ML Vgs + --VCC 圖 3.1(b) 開關 ML 關閉階段
由於功率開關的 VGS 值是由 VCC 決定,所以操作上需符合 VCC> |Vth|的條件。 此驅動電路的好處為不需要額外添加負電壓源,PWM 的邏輯訊號亦可直接控制 此驅動電路,省去設計 Level Shifter 電路的麻煩。
3.3 不使用高崩潰電壓元件之加強型上橋驅動電路
本小節先從改良加強型驅動電路做介紹,最後再將電路設計為可操作 AlGaN/GaN HEMT 功率電晶體之驅動電路,並分別以 hspice 電路設計軟體模擬 與實際電路實作驗證其設計的正確性。
3.3.1 改良加強型上橋驅動電路
在 2.3.1 節中有討論到上橋驅動電路設計與下橋驅動電路最大的差別是驅動 的功率電晶體源極是浮動電壓,需要多加一組自舉式電路與電位位準轉換電路, 但在電位位準轉換電路中(圖 2.4)有些電晶體必須承受零到 VD 的高電位差,本 論文根據這點做電路改良,使這些電晶體不必承受如此高的電壓差,本設計是參 考論文[5]並改善其缺點,並運用在高功率上橋驅動電路上,此論文的基本電路 如圖 3.2 所示,其中電晶體 MP3、電晶體 MN3分別為此驅動電路架構驅動的上橋 以及下橋元件。 VDDH MP3 MN3 MP1 MP2 C1 C2 D1 D2 A B Vin VDDL Cload Vout電路工作原理如下: (a) 第一階段:輸入電位 Vin 為電位零 開關 MP1為關閉,開關 MP2為導通,高電位 VDDH除了經由開關 MP2對電容 C2 充電,同時也經由二極體 D1 對電容 C1 充電,A 點的電位為V𝐷𝐷𝐻 V𝐷1,B 點電 位為 VDDH,此時開關 MP3為關閉,開關 MN3為導通,輸出電壓 Vout為零,如圖 3.2(a)所示。 VDDH MP3 MN3 MP1 MP2 C1 C2 D1 D2 A B Vin VDDL Cload Vout 圖 3.2(a) 開關 MP3 關閉,輸出電壓為零 (b) 第二階段:輸入電位 Vin 為電位 VDDL 瞬間 A 點電壓被提升到V𝐷𝐷𝐿 𝐷𝐷𝐻 𝐷1,B 點電壓被降低到V𝐷𝐷𝐻 𝐷𝐷𝐿,開 關 MP1為導通,開關 MP2為關閉,開關 MP3導通,開關 MN3 關閉,此時 A 點電 壓放電到 VDDH,B 點電壓提升到V𝐷𝐷𝐻 V𝐷2,輸出電壓 Vout為 VDDH,如圖 3.2(b) 所示。
VDDH MP3 MN3 MP1 MP2 C1 C2 D1 D2 A B Vin VDDL Cload Vout 圖 3.2(b) 開關 MP3 導通,輸出電壓為 VDDH 從以上兩階段可得知開關 MP1,開關 MP2在電路運作時的源-汲極(VSD)電壓 差被二極體 D1 與二極體 D2 限制在其導通電壓(VD1與 VD2)上,有效地解決其電 晶體開關的 VSD 需承受高電壓差 VDDH 的問題;但其電路中上橋電晶體是使用 PMOS 來做為電路的開關,性能會比以 NMOS 作為開關還要差,且不能用來驅 動以 AlGaN/GaN HEMT 作為開關的功率電晶體。 本論文根據此電路的優點將其改良後使用在上橋驅動電路的架構上,圖 3.3 為本論文先將其電路改良為可用一般 NMOS 電晶體作為開關的驅動電路。
VCC VD Ro Cboot M1 M2 MP1 MP2 C1 C2 D1 Db1 Db2 D2 A B Vtop MH Vout Vin1 Dboost Vin2 圖 3.3 本論文之電路架構 MH為上橋的功率電晶體,分別由 M1、M2 兩電晶體驅動。電路的控制電壓
由 Vin1、Vin2輸入,其位準分別為零以及 Vh,;Db1、Db2為二極體(body diode),
其導通電壓為 VDB;D1、D2為二極體,其導通電壓為 Vthd。MP1、MP2、M1為 PMOS,
其臨界電壓 VthP,M2 為 NMOS,臨界電壓為 VthN。此電路設計的要點之一在於 ,
V𝐶𝐶 > 𝑡ℎ𝑁,V𝑡ℎ𝑑 > | 𝑡ℎ𝑃|,Vh - Vthd > 0。
電路工作原理如下:
(a) 第一階段(初始狀態):輸入電位 Vin1 為電位零,輸入電位 Vin2 為電位零 瞬間開關 MP1為導通、開關 MP2為導通,A 點和 B 點電壓同時上升到 VCC,此
時開關 MP1為關閉,開關 MP2為關閉,電壓源 VCC 經由二極體 Dboot對自舉式電
VCC VD Ro Cboot M1 M2 MP1 MP2 C1 C2 D1 Db1 Db2 D2 VCC Vtop MH Vout Vin1 Dboot Vin2 VCC 圖 3.3(a) 初始狀態:對自舉式電容 Cboot充電 (b) 第二階段:輸入電位 Vin1 為電位零,輸入電位 Vin2 為電位 Vh 開關 MP1關閉,開關 MP2關閉,由於二極體 Db2的存在,此時電流主要由電容 C2 透過二極體 Db2對電容 Cboot充電直到 B 點電壓從 VCC + Vh 下降到 VCC+VDB 為止,而 A 點則維持電壓 VCC。而電容 C1 的跨壓為 VCC,電容 C2 的跨壓下 降到 VCC + VDB – Vh,開關 M1 關閉,開關 M2 導通,電晶體 MH的 VGS(閘-源 極電位差)為零,因此電晶體 MH關閉,輸出電壓 Vout電壓為零,如圖 3.3(b)所示。
VCC VD Ro Cboot M1 M2 MP1 MP2 C1 C2 D1 Db1 Db2 D2 VCC Vtop MH Vout Vin1 Dboot Vin2 VCC+VDB VCC+VDB-Vh + -圖 3.3(b) 電晶體 MH關閉,輸出電壓 Vout為零 (c) 第三階段:輸入電位 Vin1 為電位 Vh,輸入電位 Vin2 為電位零 輸入切換後,A 點瞬間電壓為 VCC + Vh,B 點瞬間電壓下降為 VCC + VDB - Vh,由於二極體 Db1的存在,A 點電壓下降到 VCC + VDB,因此開關 MP1導通, 開關 MP2關閉。此外,B 點電壓使得開關 M1 導通以及開關 M2 關閉,因此電晶
體 MH導通,Vout電壓開始上升。由於自舉式電容 Cboot的 Bootstrap 的技術,使
得 Vtop電壓往上提升,A 點電壓由於開關 MP1導通,其值約等於 Vtop。因此,開
關 MP2持續關閉、開關 MP1、開關 M1 持續導通。電壓提升至一定程度後,電容
Cboot透過二極體 D2 對電容 C2 充電。最後 Vtop電壓為 VCC+VD、A 點電壓約等
於 Vtop、B 點電壓約等於 Vtop- Vthd。此時,電容 C1 的跨壓為 Vtop - Vh,電容 C2
VCC VD Ro Cboot M1 M2 MP1 MP2 C1 C2 D1 Db1 Db2 D2 A B Vtop MH Vout Vin1 Dboot Vin2 圖 3.3(c) 電晶體 MH導通,輸出電壓 Vout為 VD (d) 第四階段:輸入電位 Vin1 為電位零,輸入電位 Vin2 為電位 Vh
輸入切換後,A 點瞬間電壓為 Vtop - Vh,B 點電壓為 Vtop- Vthd +Vh。由於二
極體 Db2的存在,B 點電壓維持在 Vtop,因此開關 MP1關閉,開關 MP2導通、開
關 M1關閉、開關 M2導通,進而使得電晶體 MH關閉,Vout電壓開始往下降,當
Vtop電壓比 A、B 點電壓低時,電容 C1、C2分別透過二極體 Db1、Db2對 Cboot充
電;A、B 點電壓約等於 Vtop + VDB,因此開關 MP1關閉,開關 MP2關閉。最後
Vtop約等於 VCC,Vout電壓為零。此時個開關運作的狀態和各點電壓與第二階段
相同。
因此,重複上述第三階段與第四階段,即可利用控制訊號(Vin1、Vin2)完 成加強型上橋功率電晶體的開關控制。
3.3.2 加強型上橋驅動電路之 Hspice 模擬結果
HSPICE 的電路模擬分別顯示於圖 3.4 與圖 3.5。在此電路設計中,輸出電壓 為 24V,開關切換頻率為 10KHz,此電路架構未來可運用在輸出電壓 600V 下運 作。此外,由模擬圖中可以看出,在圖 3.4 中開關 M1 與開關 M2 導通的 VGS(| VDS|)小於 VCC,開關 MP1的 VSD 即是開關 MP2的 VSG;開關 MP2的 VSD 即是開關 MP1的 VSG,其電壓皆小於 Vthd。因此開關 MP1、開關 MP2、開關 M1、 開關 M2 皆不需要具備高崩潰電壓,而在圖 3.5 中則顯示電容 C1 的跨壓 VC1以 及電容 C2 的跨壓 VC2代替電晶體承受高電位差,此作法的好處為未來電路整合 成積體電路架構,不須額外加入 LDMOS 製程,也可以使電路的運作功率更往上 提升。圖 3.5 HSPICE 模擬:VA、VB、VC1、VC2、Vtop電壓變化圖
3.3.3 加強型上橋驅動電路實驗結果
圖 3.6 為做完上橋模擬分析以後,以電路繪製軟體 Altium Designer layout 後 之結果,圖 3.7 為實際接上電路板上之情形,圖 3.8 為實際量測之波形圖,在此 實驗中各項參數如表 1 所示,其中 Vin1 和 Vin2為相位相差 180 度且工作週期(duty
cycle)為 50%之方波,從實驗結果可得知此電路架構可在輸出電壓 24V,開關切 換頻率 10KHz 下正常運作。
圖 3.6 Altium Designer layout
參數符號 參數值
VCC 10 V
VD 24V
In1 8 V 10K HZ(duty cycle 50%方波)
In2 8 V 10K HZ(duty cycle 50%方波)delay 180o
C1 33n F C2 33n F Cboost 470n F VthP -3.45 V VthN 3.79 V Ro 100 表 1 加強型驅動電路各參數值 圖 3.8 加強型驅動電路實際量測之波形圖
3.4 空乏型上橋驅動電路設計
在本論文第二章節討論到的上橋驅動電路雖然可以切換空乏型電晶體,但是 需要另外設計一個電路提供浮動電壓源,且在控制上也無法直接使用 PWM 控 制器提供的正訊號作控制,如此將增加電路的複雜性,其切換速度也會因為龐大 的附加電路而變慢,無法適用於高頻操作的氮化鎵電晶體。為了使控制簡單,本 研究將下橋閘極驅動電路的架構直接應用於上橋驅動電路中,其電路架構如圖 3.9 所示。 VCC VD Ro Cboot M1 M2 C3 MH Vout DbootLevel shfiter
D1 Vin1 Vin2 圖 3.9 氮化鎵上橋驅動電路示意圖 上橋驅動的方式使用之前介紹過的自舉式電路,利用自舉電容提供功率電晶 體穩定的 VGS,由於添加了 C3 和 D1 在驅動電路中,使自舉式電路的操作方 式與加強型的操作方式相同,我們將完整的驅動電路加入後如圖 3.10 所示。VCC VD Ro Cboot M1 M2 MP1 MP2 C1 C3 D1 Db1 Db2 D2 A B Vtop MH Vout Vin1 Dboot Vin2 D3 C2 圖 3.10 氮化鎵上橋驅動電路圖 但在實際操作上發現電路仍然不能運作,因為上橋功率電晶體為一空乏型電 晶體,其 Normally-on 的特性會使其一開始即無法關閉,縱使 M1/M2 關閉時, MH 之 VGS 仍然會藉由寄生電容 CGS 維持在 0V,MH 的源極電壓也會迅速到 達 VDD,使得 VCC 無法藉由 D 對 C1 充電進而導致電容跨壓不足,使 Mtop 無 法正常關閉。為解決此問題,尚須設計一電路來啟動上橋閘級驅動電路。
3.4.1 使用負電壓源之啟動電路設計
圖 3.11 中的虛線部分即為啟動電路的設計,包含電晶體 M3、Level Shifter 電路和負電壓源 VSS。在電路開始運作時,啟動電路中的電晶體 M3 導通,使 上橋空乏型電晶體的閘極電位約等於 VSS,將上橋電晶體 MH 關閉,此時電壓
源 VCC 經由二極體 Dboot 對自舉電容 Cboot 充電,當電容 Cboot 跨壓充至 VCC 時,
便可以將啟動電路的開關 M3 關閉。因為 Cboot 內存在足夠的跨壓,使此驅動電 路正常進行切換電晶體的動作。 VCC VD Ro Cboot M1 M2 MP1 MP2 C1 C3 D1 Db1 Db2 D2 A B Vtop MH Vout Vin1 Dboot Vin2
Start-up circuit
VSS Level shfiter VBB Vstart M3 D3 C2 圖 3.11 負電壓源之啟動電路 要控制 M3 的導通狀態,在啟動電路中需要設計一 Level Shifter 電路,將 邏輯訊號的正位準轉換成負位準,進行此一負電壓(VSS)的開關控制[18]。3.4.2 使用正電壓源之啟動電路設計
上述的作法雖然可以正確完成上橋空乏型電晶體的驅動,但是其啟動電路需 要一負電壓源 VSS 及複雜的 level shifter 電路。增加實行的困難性,因此本論文 設計出另一作法,如圖 3.12 所示。 VCC VD Ro Cboot M1 M2 MP1 MP2 C2 C3 D1 Db1 Db2 D2 A B Vtop MH Vout Vin1 Dboot Vin2Start-up circuit
D3 M3 D4 Vstart C1 圖 3.12 正電壓源之啟動電路 此作法將圖 3.11 的負電壓源(VSS)改為接地,如此便可以直接利用電位 VC 的脈衝訊號 Vstart(在一開始電路運作前半週期輸入 VC 電壓,後來皆為零)訊 號來控制啟動電路,不需要額外的 Level shifter。其操作方式與圖 3.11 相似,詳 細的電路運作如下:(a) 第一階段(初始狀態):輸入電位 Vin1 為電位零,輸入電位 Vin2 為電位零 瞬間開關 MP1為導通、開關 MP2為導通,A 點和 B 點電壓同時上升到 VCC,此
時開關 MP1為關閉,開關 MP2為關閉,開關 M1 關閉,開關 M2 導通,因為電晶
體 MH導通,輸出電壓 Vout為 VD,電容 Cboot因為還沒充電,所以 Vtop 無法拉
到電壓 VD,此時電容 C1 與電容 C2 的跨壓為 VCC,如圖 3.12(a)所示。 VCC VD Ro Cboot M1 M2 MP1 MP2 C1 C3 D1 Db1 Db2 D2 VCC VCC Vtop MH Vout Vin1 Dboot Vin2 D3 M3 D4 Vstart C2 圖 3.12(a) 初始狀態:電晶體 MH導通,輸出電壓為 VD (b) 第二階段:輸入電位 Vin1 為電位零,輸入電位 Vin2 為電位 Vh,輸入電位 Vstart為電位 VC 在一開始由於啟動電路中的開關 M3 導通,使上橋電晶體 MH 的閘極電位約為 零,如此電位 Vout 將會被限制在電晶體 MH的臨界電壓上(若是上橋電晶體的
Vth 為-4V,則 Vout 會約為 4V),電容 C3 的跨壓可充電到約|Vth|,開關 MP1 關 閉,開關 MP2 關閉,由於二極體 Db2的存在,此時電流主要由電容 C2 透過二極 體 Db2對電容 Cboot充電直到 B 點電壓從 VCC + Vh 下降到 VCC+VDB為止,而電 容 Cboot可充電到跨壓為 VCC - Vout,而 A 點則維持電壓 VCC。而電容 C1 的跨 壓為 VCC,電容 C2 的跨壓下降到 VCC + VDB – Vh,如圖 3.12(b)所示。 VCC VD Ro Cboot M1 M2 MP1 MP2 C1 C3 D1 Db1 Db2 D2 VCC VCC+VDB Vtop MH |Vth| Vin1 Dboot Vin2 D3 M3 D4 Vstart C2 VCC+VDB-Vh + -|Vth| + -圖 3.12(b) 啟動電路運作階段:使自舉電容 Cboot能夠充電 (c) 第三階段:輸入電位 Vin1 為電位 Vh,輸入電位 Vin2 為電位零,輸入電位 Vstart為電位零 開關 M3 關閉,A 點瞬間電壓為 VCC + Vh,B 點瞬間電壓下降為 VCC + VDB - Vh, 由於二極體 Db1的存在,A 點電壓下降到 VCC + VDB,因此開關 MP1導通,開關
MP2關閉。此外,B 點電壓使得開關 M1 導通以及開關 M2 關閉,因此電晶體 MH
導通,Vout 電壓開始上升。此時自舉式電容 Cboot在前一階段已經充電,使得 Vtop
電位可以往上提升,A 點電壓由於開關 MP1導通,其值約等於 Vtop。因此,開關
MP2持續關閉、開關 MP1、開關 M1 持續導通。電壓提升至一定程度後,電容 Cboot
透過二極體 D2 對電容 C2 充電,同時也透過開關 M1 對電容 C3 充電。最後 Vtop
電壓為 VCC+VD、A 點電壓約等於 Vtop、B 點電壓約等於 Vtop- Vthd。Vout電壓此
時為 VD,電容 C1 的跨壓為 Vtop - Vh,電容 C2的跨壓為 Vtop - Vthd,電容 C3 的 跨壓為 VCC - Vthd,如圖 3.12(c)所示。 VCC VD Ro Cboot M1 M2 MP1 MP2 C1 C3 D1 Db1 Db2 D2 A B Vtop MH Vout Vin1 Dboot Vin2 D3 M3 D4 Vstart C2 圖 3.12(c) 電晶體 MH完全導通,輸出電壓 Vout為 VD (d) 第四階段:輸入電位 Vin1 為電位零,輸入電位 Vin2 為電位 Vh,輸入電位 Vstart為電位零 A 點瞬間電壓改變為 Vtop - Vh,B 點電壓為 Vtop- Vthd +Vh。由於二極體 Db2的存 在,B 點電壓維持在 Vtop,因此開關 MP1關閉,開關 MP2導通、開關 M1關閉、
開關 M2導通,進而使得電晶體 MH的閘極電壓為-VCC,使電晶體 MH關閉,Vout
電壓開始往下降,當 Vtop電壓比 A、B 點電壓低時,電容 C1、C2分別透過二極
體 Db1、Db2對 Cboost充電;A、B 點電壓約等於 Vtop + VDB,因此開關 MP1關閉,
開關 MP2關閉。最後 Vtop約等於 VCC,Vout電壓為零,如圖 3.12(d)所示。 VCC VD Ro Cboot M1 M2 MP1 MP2 C1 C3 D1 Db1 Db2 D2 VCC VCC+VDB Vtop MH Vin1 Dboot Vin2 D3 M3 D4 Vstart C2 VCC+VDB-Vh + --VCC + -圖 3.12(d) 電晶體 MH關閉,輸出電壓 Vout為零 重複上述第三階段以及第四階段,即可利用控制訊號(Vin1、Vin2、Vstart) 完成加強型上橋功率電晶體的開關控制,值得注意的是一開始自舉式電容 Cboot 的跨壓只能充到 VCC – Vout(~VCC-|Vth|),因此必須選定 VCC,使得-(VCC-|Vth|) < Vth,方能將 MH 關閉。因此圖 3.12 中 Vout一開始不會被拉至零,需先對自舉 式電容 Cboot充電後便可在電位 VD 及電位零正常切換。另外,若電晶體 M3 具 有一 Body Diode,將使 MH 的閘極電壓無法低於零,導致 MH無法正常切換,故 需要添加二極體 D4 來限制電流流向。
3.4.3 空乏型上橋驅動電路之 Hspice 模擬結果
圖 3.13 與圖 3.14 為空乏型上橋驅動電路的模擬結果,由模擬圖中可得知: 空乏型驅動電路除了受驅動電晶體 MH 的 Vgs 跨壓確實有拉到零位準(導通)與 -VCC 位準(關閉)外,其餘各點電位與電路運作方式皆與 3.3.2 的結果相似,模擬 結果顯示可在輸出電壓 24V,開關切換頻率 10KHZ 下操作。 此空乏型驅動電路和上一節所介紹的加強型驅動電路最大的不同點為:雖然 在電位位準轉換器中不需要高崩潰電晶體,但在啟動電路裡的電晶體 M3 仍然需 要高崩潰電壓元件。圖 3.13 HSPICE 模擬:輸入電壓 Vin1、輸入電壓 Vin2、啟動電壓 Vstart、電晶體 MH(VGS)、輸
出電壓 Vout電壓變化圖
圖 3.14 HSPICE 模擬:A 點電壓 VA、B 點電壓 VB、電容 C1 跨壓 VC1、電容 C2 跨壓 VC2、Vtop
3.4.4 空乏型上橋驅動電路實驗結果
圖 3.15 為 GaN HEMT 驅動電路的實驗結果,從實驗結果可得知此電路架構 可在輸出電壓 24V,開關切換頻率 10KHz 下正常運作。 參數符號 參數值 VCC 10 V VD 24V Vstart 5V(pluse) In1 8 V 10K HZ(duty cycle 50%方波)In2 8 V 10K HZ(duty cycle 50%方波)delay 180o
C1 33n F C2 33n F C3 33n F Cboot 470n F VthP -3.45 V VthN 3.79 V Ro 100 表 2 空乏型驅動電路各參數值 圖 3.15 GaN HEMT 閘極驅動電路實驗結果
第四章
提升氮化鎵電晶體崩潰電壓之驅動電路
氮化鎵電晶體具有低的導通電阻、快速切換、等優點,因此被視為下一世代 的功率電晶體的可能作法之一。大量的金錢與研究人力也都在近期投入氮化鎵電 晶體的研發中。功率電晶體的崩潰電壓是其性能的重要指標之一,因此許多的氮 化鎵電晶體的研究都在於如何提升其崩潰電壓,惟大部分的作法都是利用特殊的 製程設計、元件設計,其技術層次高,且相當昂貴。本論文根據 1.3 節的介紹, 利用電路設計的方式來增加氮化鎵電晶體於操作時的崩潰電壓,且可應用於已製 作完成的氮化鎵電晶體,為一相當便宜且極具競爭力的作法。 本章節將依序介紹:4.1 漏電流對崩潰電壓之影響 4.2 限制電流之電路 4.3 限制電流之電路 Hspice 模擬結果 4.4 實際元件量測與電路實驗結果4.1 漏電流對崩潰電壓之影響
由 1.3 節的介紹可知當要發生汲-閘極崩潰時,汲極和源極的電壓差越高,漏 電流越大,且當到達崩潰電壓時,汲極漏電流會幾乎全部流向閘極。[3]利用製 程方式限制住閘極漏電流,圖 4.1(a)以及圖 4.1(b)所示為使用製程改善前和改善 後的 AlGaN/ GaN HEMT 電晶體操作在截止區(cut-off)時各個輸出/輸入端點 的電流(漏電流)關係圖,從兩圖可知使用製程改善後元件的崩潰電壓明顯提升, 本論文是利用此一 AlGaN/ GaN 電晶體獨有的特點,設計一電路來限制當 AlGaN/ GaN HEMT 電晶體關閉時汲極流向閘極的電流,進而提高電晶體的崩潰電壓。圖 4.1(a) 製程改善前各極間的漏電流和 Vds 的關係圖 圖 4.1(b) 用製程改善後各極間的漏電流和 Vds 的關係圖
4.2 限制電流之電路
圖 4.2 為本作法增加 GaN 電晶體崩潰電壓的方式。圖中的最右邊(MGaN)
為 GaN 電晶體,左邊為基本的電晶體驅動電路(gate driver),本發明在電晶體 的閘極位置加入一電流限制電路。此電流限制電路必須在不能影響 GaN 電晶體 的正常開關下,在電晶體關閉時,限制閘極電流大小 Current Limit Circuit
V
sM
1M
2M
GaNV
DDHV
DDR
LIn
Out
V
DDL 圖 4.2 GaN 電晶體驅動電路圖 4.3 所示為上述「電流限制」(current limit)電路的設計實例之一。其基 本概念為利用一電阻 RG來獲得流經閘極的電流,RG電阻值不能太大,因為它會 降低 GaN 電晶體開啟/關閉的切換速度。 然而若是 RG電阻值小,電流變化造成的電壓變化就會小,因此另外設計一 電路來獲得 Vref,透過 Vref的設計,只要 V1有些許的電壓變化,便可以開啟/關 閉 M3電晶體,進而達到限制電流的目的。為了說明方便起見,假設 M3, M4,的臨
界電壓(threshold voltage)皆為 VthN,Vs為 MGaN電晶體開/關的控制訊號,主
要有兩個位準 VDDH (使電晶體 MGaN導通的零位準)、VDDL(使電晶體 MGaN關閉的 負位準)。
R
GR
3R
2M
3M
4In
V
1Out
V
refV
DDLR
4D
圖 4.3 電流限制電路設計一 電路工作原理大致如下:當V = Vs DDL 時,M1導通,電流由電壓源 VDDH, 透過二極體,流向電晶體 MGaN,電晶體 MGaN可以順利開啟。當V = Vs DDH,開關 M2為導通,電流應由電晶體 MGaN閘極流向電壓源 VDDL,此時 V1電壓可表示成 如下: V1 𝐷𝐷𝐿 ∆ (4-1) 其中∆ 代表電阻 RG的壓降。此時 VREF 可表示如下:V𝑅𝐸𝐹 𝑡ℎ𝑁⌊ 𝑅2 𝑅3 𝑅2 ⌋ 𝐷𝐷𝐿 (4-2) M3的導通條件可表示如下: V𝑅𝐸𝐹 1 > 𝑡ℎ (4-3) 將方程式 1 和 2 帶入上式後可得: ∆V < V𝑡ℎ𝑁𝑅3 𝑅2 (4-4) 已知∆V代表電阻 RG的壓降,因此可表示成: ∆V i𝐺R𝐺 (4-5) 將方程式 5 代入 4 如下 i𝐺 < V𝑡ℎ𝑁𝑅𝑅3 2R𝐺 (4-6) 因此可知,當閘極的流出電流小於某一定值(4-6)時,開關 M3會導通。反之, 電流太大,開關 M3就會關閉,藉此提高電晶體 MGaN的崩潰電壓。 上述作法相當簡潔,惟必須考慮的是,若電晶體 MGaN的瞬間關閉電流與所 欲限制的崩潰時閘極電流相近,此作法很可能會降緩電晶體 MGaN的關閉速度。 因此提出另一設計實例(圖 4.4),讓電流限制電路僅在 MGaN電晶體關閉後才發揮 作用。 此作法與上述作法類似,但額外增加 M5與 M6電晶體。其中 VthG為介於 MGaN 電晶體臨界電壓與零電壓之間的負電壓,其數值會影響開關切換速度。
VDDL RG R3 R2 M3 M4 In V1 Out Vref M5 M6 VDDL VthG VthG V3 R4 Rref R5 圖 4.4 電流限制電路設計二 電路的工作原理如下: (a) 第一階段:輸入電壓 In 為 VDDH 電流經由電阻 RG通過二極體 D 流到輸出 Out,此時輸出電壓 Vout約為 VDDH,開 關 M6 關閉,開關 M5 導通,電位 V3被拉到 VthG,開關 M3 關閉,因 Vout電位為 VDDH,電晶體 MGaN正常導通,如圖 4.4(a)所示。 VDDL RG R3 R2 M3 M4 In V1 Out Vref M5 M6 VDDL VthG VthG V3 R4 Rref R5 圖 4.4(a) 驅動電晶體 MGaN正常導通,限流電路不運作
(b) 第二階段:輸入電壓 In 為 VDDL 電晶體 MGaN由開啟至關閉的瞬間,電晶體 MGaN的閘極電壓約為 VDDH,開關 M6 關閉、開關 M5 導通,V3大約等於 VthG,則開關 M3導通,電流順利由閘極 流出,如圖 4.4(b-1)所示;此狀況會一直維持直到 MGaN的閘極電壓約為 VthG+VthP, 確保 MGaN進入關閉狀態,此時 MGaN的閘極電壓會繼續降低,開關 M6 導通、開 關 M5 關閉,V3等於圖 4.3 中 Vref 的值,限流電路開始運作。 VDDL RG R3 R2 M3 M4 VDDL V1 VDDH Vref M5 M6 VDDL VthG VthG V3 R4 Rref R5 D 圖 4.4(b-1) 開關 M3 導通,使 MGaN閘極能快速放電 VDDL RG R3 R2 M3 M4 VDDL V1 VthG+VthP Vref M5 M6 VDDL VthG VthG V3 R4 Rref R5 D 圖 4.4(b-2) 開關 M3 關閉,限流電路開始運作 在使用圖 4.4 架構模擬電路運作時發現此電路架構操作頻率仍然不能很高, 因此再次將電路改成如圖 4.5 所示,此電路與圖 4.4 最大的差別在於在電阻 RG 上增加控制開關 Madd,並以 V1 電壓為回授電壓,使電路在電晶體 MGaN關閉瞬 間切換更為快速,其運作原理與電流限制電路設計二類似。
Rref R4 R3 R2 VDDL RG M3 M4 VthG R5 VDDL VthG M6 M5 VthG M7 R7 VDDL Madd Out D V4 V 3 V1 In 圖 4.5 電流限制電路設計三 電路的工作原理如下: (a) 第一階段:輸入電壓 In 為 VDDH 電流經由二極體 D 流到輸出 Out,輸出電壓 Vout約為 VDDH,開關 M6 關閉,開 關 M5 導通,電位 V3被拉到 VthG,開關 M3 關閉,同理開關 M7 導通,電位 V4
被拉到 VthG,因此控制開關 Madd關閉,Vout電位為 VDDH,電晶體 MGaN正常導通,
Rref R4 R3 R2 VDDL RG
In
M3 M4 VthG R5 VDDL VthG M6 M5 VthG M7 R7 VDDL Madd Out D V4 V3 V1 圖 4.5(a) 驅動電晶體 MGaN正常導通,限流電路不運作 (b) 第二階段:輸入電壓 In 為 VDDL 電晶體 MGaN由開啟至關閉的瞬間,電晶體 MGaN的閘極電壓約為 VDDH,開關 M6 關閉、開關 M5 導通,V3電壓大約等於 VthG,則開關 M3導通,同理 V1 被拉 到 VDDL後,開關 M7 導通,V3電壓大約等於 VthG,新增的控制開關 Madd導通, 電流順利由閘極流出,如圖 4.5(b-1)所示。Rref R4 R3 R2 VDDL RG M3 M4 VthG R5 VDDL VthG M6 M5 VthG M7 R7 VDDL Madd VDDH D V4 V3 V1 VDDL 圖 4.5(b-1) 開關 M3 導通,電阻 RG短路,使 MGaN閘極能快速放電 上述狀況會一直維持直到 MGaN的閘極電壓約為 VthG+VthP,確保 MGaN進入關閉 狀態,此時 MGaN的閘極電壓會繼續降低,開關 M6 導通、開關 M5 關閉,V3電 壓等於圖 4.3 中 Vref 的值,同理開關 M7 關閉,V4電壓等於 VDDL,限流電路開 始運作。 Rref R4 R3 R2 VDDL RG M3 M4 VthG R5 VDDL VthG M6 M5 VthG M7 R7 VDDL Madd VthG+VthP D V4 V3 V1 VDDL 圖 4.5(b-2) 開關 M3 關閉,開關 Madd關閉,限流電路開始運作
4.3 限制電流之電路 Hspice 模擬結果
圖 4.6 為此限流電路在 Hspice 模擬的結果,從模擬結果可得知此電路架構可 在輸入電壓 24V,操作頻率 10K Hz 下之 AlGaN/GaN 閘極驅動電路下運作正常。
圖 4.6 限流電路:輸出電壓 Vout、閘極電壓 Vgate、電晶體 M3(Vgs)、電晶體 Madd(Vgs)、輸入電
壓 In 雖然本論文在圖 4.6 分析了此電路在一般切換下正常運作,但是因 Hspice 無法分析電晶體的漏電流大小,所以本論文另外做了電路的直流分析,確保我們 所預期的限流電路所限制的電流大小是正確的,圖 4.7 為固定輸入電壓-7V,對 電晶體 MGaN閘極電壓做從電壓零到電壓-7 的直流分析,從模擬結果可得知在電 晶體 M3 以及電晶體 Madd皆關閉時,驗證確實可限制閘極漏電流 ig。

![圖 1.10 不同 V GS 所導致不同的接面崩潰 (1) 汲-閘極崩潰 當 V GS 輸入的跨壓較小,汲極電壓達崩潰電壓,閘極電場不足以阻止 Depletion 區通過的電流,大部分的漏電流將直接流到閘極造成電晶體損毀[4], 在此圖中約為-15V~-10V,而 V DS 電壓為 50V~60V 之間,V DG 電位差變化小(在 圖中 V DS _V GS 曲線幾乎為正比關係),汲極電流急遽上升(從 10~60uA/mm),此現 象為汲-閘極崩潰。 (2) 汲-源極崩潰 當 V GS 輸入的跨壓](https://thumb-ap.123doks.com/thumbv2/9libinfo/8742263.204413/21.892.208.683.107.467/區通過閘極造成電晶體損在此圖中約為V電壓VV之間V差變跨壓.webp)
![圖 2.2 為簡單的 P 通道閘極驅動電路[13],由電晶體 Q1 和兩個電阻 R1、 R2 組成一位準轉換電路(Level Shifter) ,目的就是提供一個相對於源極的負電 壓訊號將功率元件導通。而二極體 D1 的作用在於防止功率元件的閘-源極電壓 差(V GS )過大使元件損壞。此電路的功率損耗主要在上橋元件的輸入電容和 Q1 導通時流過 Level Shifter 的電流上。 在一般高效率、大功率的系統應用中,仍會採用性能較佳且價格也較便宜的 N 通道元件作為上橋功率電晶體,但是該](https://thumb-ap.123doks.com/thumbv2/9libinfo/8742263.204413/28.892.138.757.540.1087/為簡單二極體作用在於防止功率元件閘源極電在一般系統應用中仍.webp)