國 立 交 通 大 學
土木工程學系
碩士論文
三維雷射掃瞄儀反射標定位精度提升之研究
-以 Trimble Mensi GS200 為例
研究生:曾信翰
指導教授:陳春盛
中華民國九十七年七月
三維雷射掃瞄儀反射標定位精度提升之研究
-以 Trimble Mensi GS200 為例
A Study on the Improving 3D Laser Scanner Target's Positioning Precision and Accuracy -A Case of Trimble Mensi GS200
研 究 生:曾信翰 Student:Xin-Han Zeng
指導教授:陳春盛 Advisor:Dr. Chun-Sung Chen
國 立 交 通 大 學
土 木 工 程 學 系
碩 士 論 文
A Thesis
Submitted to Department of Civil Engineering College of Engineering
National Chiao Tung University in Partial Fulfillment of the Requirements
for the Degree of Master in
Civil Engineering July 2008
Hsinchu, Taiwan, Republic of China
中華民國九十七年七月
三維雷射掃瞄儀反射標定位精度提升之研究-以 Trimble GS200 為例 學生:曾信翰 指導教授:陳春盛 博士 國立交通大學土木工程研究所碩士班
中文摘要
使用三維雷射掃瞄儀掃描時,單一測站往往無法完整涵蓋被測物的範圍,常需要整 合多個測站的點雲資料來達成目的,點雲連結問題主要為求得各測站坐標系統間的轉換 關係,或轉換到相同坐標系統。其中磁性覘標控制點法為利用相鄰測站之重疊觀測區域 裡擺設磁性反射標當控制點,反射標主要作用是為了提供雷射掃瞄點雲資料一個明顯而 且定位精準的特徵,只要有三個以上的控制點,即可求得相連測站之三維座標轉換參數 ,故反射標的定位精度將會對點雲結合的精度有極大影響。 本研究擬以Trimble Mensi GS200 型三維雷射掃瞄儀掃瞄儀選定適當試驗場進行實 驗,欲提升反射標定位精度,主要考量因素有二:一為經三維雷射掃瞄儀掃瞄出來的點 雲資料會因為量測環境而產生雜訊,故使用六種雜訊濾除方法,距離濾除法、最小角度 濾除法、最適平面法、高斯平滑、中値平滑、平均平滑濾除反射標原始點雲中的量測雜 訊點,以求得更好的反射標定位精度;二為反射標選擇上也會影響到反射標定位精度, 不同的反射標會有不同的定位精度,除使用原廠所率定之反射標外,另選擇自製反射標 進行實驗,並比較自製反射標與原廠反射標定位精度差異。 研究分 30、60、90 公尺三段距離進行實驗,成果發現,使用六種雜訊濾除方法確 實能提升反射標定位精度,其中以最適平面法為最佳,無論是內部精度或外部精度。自 製反射標與原廠反射標定位精度比較後,內部精度方面,自製反射標優於原廠反射標; 外部精度方面,在 30 公尺及 60 公尺原廠反射標優於自製反射標,90 公尺處自製反射標 優於原廠反射標。A Study on the Improving 3D Laser Scanner Target's Positioning Precision and Accuracy -A Case of Trimble Mensi GS200
Student:Xin-Han Zeng Advisor:Dr. Chun-Sung Chen Department of Civil Engineering National Chiao Tung University
Abstract
When using 3D Laser scanner, multiple scans are required for a complete scan project. The point clouds of each scan is defined a local coordinate, data sets of multi-station must be merged into a uniform coordinate system or each coordinate system transforming parameter. One way is put at least three targets in overlapping scan stations to get coordinate system transforming parameter, so target’s positioning precision and accuracy is important.
The study use Trimble Mensi GS200 3D laser scanner to experiment. In order to improve target’s positioning precision and accuracy, we consider two factors: 1. Point clouds make noises with environment, and therefore use six noise filterings: remove scatter points、remove spikes、fit plane、gaussian smooth、median smooth、averaging smooth to filter point cloud’s noises. 2. Different targets have different precision and accuracy. Besides original targets, we use handmade targets and compare the relationship with both targets.
Experiment divide into three distances 30m、60m、90m, the result found using six noise filterings improve target’s positioning precision and accuracy certainly. Behind comparing the relationship with original targets and handmade targets, handmade targets are better than original targets in precision part. In 30m and 60m distances original targets are better than handmade targets in accuracy part, but in 90m distance handmade targets are better than original targets in accuracy part.
致謝
在交大的兩年眼睛眨一下就過去了,時間真是飛逝如梭,致謝是本論文最後一部 份,也將為我的碩士學位畫下一個最完美的句點。首先當然要先感謝我在學兩年的指導 教授陳春盛老師這兩年來的悉心教導,對論文的寫作及問題給予最大的鼓勵與批評改 正,幫助我渡過重重難關,雖然我已畢業,但老師您永遠是我的指導教授;接下來要感 謝的是陳老師旗下大弟子,也就是博士班學長:阿 KEN 塞、達哥、俊寰學長,特別是阿 肯學長在論文上提出的意見及改正,達哥快樂的澎湖之旅,俊寰學長課業上的指導。還 有已經畢業的學長:傑扣學長、胖虎學長、熱狗學長,這三位學長在我剛進交大懵懂無 知時,敎我如何面對種種難關,不論是課業上或者是做人處事上,各位學長們也是運動 時的好伙伴。 除了在課業上要感謝的人外,當然也要感謝在研究所中娛樂上的酒肉朋友:小悶、 小光、小亨利,我們除了在運動場上廝殺外,在電腦前面廝殺的更厲害,有了他們幾個, 使我的生活更多彩多姿,使我有動力繼續向前,也讓我的等級越來越高 Orz。當然也要 感謝我的同學:富傑、阿嵐、歷韋、逸晴、老吳、紫猗各位同學的幫助,如:富傑都會 在咪聽時帶東西給我們吃、阿嵐搞笑的講話方式、歷韋天兵天兵等,雖然我要畢業了, 但我不會忘記你們的。另外也要感謝學弟ㄟ毛、建成及我的女友,ㄟ毛幫我搬儀器,建 成幫我寫了一個小程式,我的女友也不時的督促我,都使我的論文更加順利快速完成。 要感謝的人實在太多太多了,這邊沒提到的先跟您說聲對不起,但我的內心還是由衷的 感謝你們的。 這一本論文,看起來是由一堆冰冷的文字構成的,但裡面有著大家的辛苦才完成 的,因此我相當珍惜它,最後將此論文獻給我最親愛的父母,以表示對你們的尊敬,沒 有你們就沒有這本論文,謝謝你們。目錄
中文摘要... I Abstract... II 致謝...錯誤! 尚未定義書籤。 目錄... IV 表目錄... VI 圖目錄... VIII 第一章 前言... 1 1-1 研究動機與目的 ... 1 1-2 研究方法 ... 3 1-3 研究流程 ... 4 1-4 論文架構 ... 6 第二章 理論基礎... 7 2-1 三維雷射掃瞄儀系統 ... 7 2-1-1 掃描原理 ... 8 2-1-2 坐標轉換 ... 11 2-1-3 誤差來源 ... 13 2-1-4 點雲結合 ... 14 2-2 基於三個控制點的點雲對齊方法 ... 16 2-2-1 控制點選擇 ... 17 2-2-2 三點對齊坐標變換方法 ... 18 2-2-3 三點定位的精度分析 ... 20 2-3 點雲雜訊濾除方法 ... 21 2-3-1 距離、最小角度率除法 ... 21 2-3-2 最適平面法 ... 222-3-3 點資料平滑化 ... 27 第三章 反射標內部精度... 29 3-1 外業掃描工作規劃 ... 29 3-2 使用儀器、軟體說明 ... 31 3-3 實驗設計與資料處理 ... 33 3-1-1 實驗設計 ... 33 3-1-2 實驗資料 ... 36 3-1-3 內業資料處理流程 ... 37 3-4 反射標內部精度 ... 42 第四章 反射標外部精度... 59 4-1 實驗設計與資料處理 ... 59 4-1-1 實驗設計 ... 59 4-1-2 實驗資料 ... 60 4-1-3 內業資料處理流程 ... 61 4-2 反射標外部精度 ... 64 第五章 結論與建議... 80 參考文獻... 82
表目錄
表 2-1 三維雷射掃描儀基本資料 ... 7 表 2-2、三維雷射掃瞄儀的誤差分類與誤差來源 ... 14 表 3-1、Trimble GS200 型三維雷射掃瞄儀規格 ... 31 表 3-2、30 公尺自製反射標(Object)擬合平面 RMS 值 ... 44 表 3-3、60 公尺自製反射標(Object)擬合平面 RMS 值 ... 44 表 3-4、90 公尺自製反射標(Object)擬合平面 RMS 值 ... 44 表 3-5、30 公尺原廠反射標(Target)擬合平面 RMS 值 ... 45 表 3-6、60 公尺原廠反射標(Target)擬合平面 RMS 值 ... 45 表 3-7、90 公尺原廠反射標(Target)擬合平面 RMS 值 ... 45 表 3-8、自製反射標(Obj)與原廠反射標(Tar)擬合平面之平均 RMS 值 ... 46 表 3-9、原始擬合平面 RMS 與六種雜訊濾除方法擬合平面 RMS 較差表 ... 47 表 3-10、30 公尺自製反射標(Object)中心點位標準偏差 σs ... 49 表 3-11、60 公尺自製反射標(Object)中心點位標準偏差 σs ... 49 表 3-12、90 公尺自製反射標(Object)中心點位標準偏差 σs ... 50 表 3-13、30 公尺原廠反射標(Target)中心點位標準偏差 σs ... 50 表 3-14、60 公尺原廠反射標(Target)中心點位標準偏差 σs ... 50 表 3-15、90 公尺原廠反射標(Target)中心點位標準偏差 σs ... 51 表 3-16、自製反射標(Obj)與原廠反射標(Tar)中心點位平均標準偏差 σs... 52 表 3-17、自製反射標(Obj)與原廠反射標(Tar)中心點位平均標準偏差 σs較差表... 52 表 3-18、自製反射標(Object)與原廠反射標(Target)擬合平面平均 RMS 值與中心點位 平均標準偏差 σs關係 ... 53 表 3-19、自製反射標與原廠反射標中心點位標準偏差 σs比較表... 57 表 3-20 自製反射標與原廠反射標中心點位標準偏差 σs較差表 ... 58 表 4-1 全測儀觀測計算所得之十八個反射標中心點位坐標 ... 60表 4-2、30 公尺自製反射標原始點雲中心點位坐標六參數轉換成果表 ... 62 表 4-3、30 公尺自製反射標六種雜訊濾除方法與原始點雲中心點位坐標較差表 .... 64 表 4-4、60 公尺自製反射標六種雜訊濾除方法與原始點雲中心點位坐標較差表 .... 65 表 4-5、90 公尺自製反射標六種雜訊濾除方法與原始點雲中心點位坐標較差表 .... 65 表 4-6、30 公尺原廠反射標六種雜訊濾除方法與原始點雲中心點位坐標較差表 .... 66 表 4-7、60 公尺原廠反射標六種雜訊濾除方法與原始點雲中心點位坐標較差表 .... 66 表 4-8、90 公尺原廠反射標六種雜訊濾除方法與原始點雲中心點位坐標較差表 .... 67 表 4-9、六種雜訊濾除方法與原始點雲 Δx、Δy、Δz 正負值差距最大表 ... 68 表 4-10、六參數轉換反射標原始點雲及六種雜訊濾除後點雲外部精度 ... 71 表 4-11、六參數轉換反射標原始點雲及六種雜訊濾除後點雲 RMS-s 值 ... 71 表 4-12、七參數轉換反射標原始點雲及六種雜訊濾除後點雲外部精度 ... 72 表 4-13、七參數轉換反射標原始點雲及六種雜訊濾除後點雲 RMS-s 值 ... 72 表 4-14、六參數轉換原始點雲與六種雜訊濾除後點雲 RMS-s 值較差表 ... 73 表 4-15、七參數轉換原始點雲與六種雜訊濾除後點雲 RMS-s 值較差表 ... 74 表 4-16、自製反射標與原廠反射標六參數與七參數轉換外部精度較差表 ... 76 表 4-17、自製反射標及原廠反射標中心點位坐標外部精度比較表 ... 78 表 4-18、自製反射標及原廠反射標中心點位坐標外部精度較差表 ... 79
圖目錄
圖 1-1.研究流程圖 ... 5 圖 2-1、時間差量測法示意圖 ... 8 圖 2-2、三角法:單相機法 ... 9 圖 2-3、三角法:雙相機法 ... 10 圖 2-4、三維雷射掃瞄儀與物體間相對坐標系示意圖 ... 11 圖 2-5、掃瞄儀坐標系與物空間坐標系之關係圖 ... 12 圖 2-6、基於三個控制點的點雲對齊方法示意圖 ... 16 圖 2-7、Mensi 生產之反射標 ... 17 圖 2-8、三點坐標變換示意圖 ... 19 圖 2-9、距離濾除法 ... 21 圖 2-10、最小角度濾除法 ... 22 圖 2-11、平均平滑法(Averaging) ... 27 圖 2-12、中値平滑法(Median) ... 28 圖 2-13、高斯平滑法(Gaussian) ... 28 圖 3-1 外業掃描流程圖 ... 30 圖 3-2、Trimble GS200 型三維雷射掃瞄儀距離與掃瞄精度關係圖 ... 32 圖 3-3、LiDAR 處理程式 ... 32 圖 3-4、左為自製反射標(Object);右為原廠反射標(Target) ... 33 圖 3-5、自製反射標與原廠反射標佈設方式 ... 34 圖 3-6、30m 處架設三維雷射掃瞄儀掃描情形 ... 34 圖 3-7、外業掃描點雲成果 ... 35 圖 3-8、將 ASC 點雲資料以記事本開啟 ... 36 圖 3-9、原廠反射標點雲 ... 37 圖 3-10、自製反射標點雲 ... 37圖 3-11、30m Target1 圓形部份原始點雲不同視角原始點雲資料 ... 38
圖 3-12、六種雜訊濾除後 30m Target1 之點雲資料 ... 38
圖 3-13、六種雜訊濾除後之點雲資料不同視角比較圖 ... 39
圖 3-14、RealWorks4.2 Registration Target Analyzer Tool ... 40
圖 3-15、Target Analyzer Tool 解算反射標中心點位坐標及 RMS 值 ... 40
圖 3-16、內業流程圖 ... 41 圖 3-17、自製反射標(Obj)與原廠反射標(Tar)平均擬合平面 RMS 值折線圖 ... 46 圖 3-18、高內部精度(精密度高);低內部精度(精密度低) ... 48 圖 3-19、自製反射標(Obj)與原廠反射標(Tar)中心點位平均標準偏差 σs 折線圖 .. 52 圖 3-20、30 公尺自製反射標(Object)RMS 與 σs關係... 54 圖 3-21、60 公尺自製反射標(Object)RMS 與 σs關係... 54 圖 3-22、90 公尺自製反射標(Object)RMS 與 σs關係... 54 圖 3-23、30 公尺原廠反射標(Target)RMS 與 σs關係... 55 圖 3-24、60 公尺原廠反射標(Target)RMS 與 σs關係... 55 圖 3-25、90 公尺原廠反射標(Target)RMS 與 σs關係... 55 圖 4-1、全測儀觀測反射標示意圖 ... 59 圖 4-2、六參數及七參數轉換程式 ... 62 圖 4-3、外部精度分析流程圖 ... 63 圖 4-4、自製反射標編號 1 三段距離原始點雲變化 ... 68 圖 4-5、原廠反射標編號 1 三段距離原始點雲變化 ... 68 圖 4-6、六參數轉換ΔRMS-s 折線圖 ... 73 圖 4-7、七參數轉換ΔRMS-s 折線圖 ... 74 圖 4-8、自製反射標六參數與七參數轉換外部精度較差圖 ... 76 圖 4-9、原廠反射標六參數與七參數轉換外部精度較差圖 ... 76 圖 4-10、六參數轉換自製反射標與原廠反射標原始點雲中心點位坐標外部精度 .... 78 圖 4-11、七參數轉換自製反射標與原廠反射標原始點雲中心點位坐標外部精度 .... 79
第一章 前言
1-1 研究動機與目的
近年來使用三維雷射掃瞄儀於各種工程應用上越來越受到重視,舉凡土木建設工 程、變形監測、數位古蹟典藏、隧道測量、逆向工程、自然景觀維護等,皆須實施現地 的測量以獲得被測物的三維空間資訊,是目前應用相當廣泛的技術。應用三維雷射掃瞄 儀測量具有以下優點,儀器只需要一個立足點,即能以不接觸到物體的情況下快速獲得 被測物體表面高密度以及高精度的三維點位,有別於傳統測量的針對被測物體單一特徵 點進行量測,三維雷射掃瞄儀可以說是屬於一種面的測量;三維雷射掃瞄儀除具有快 速、高精度、高密度獲得物體表面空間資訊的優點外,更解決了因觀測者所造成的人為 觀測誤差;三維雷射掃瞄儀為一主動式量測,在黑暗中亦可由儀器主動發射雷射光源進 行量測,對於在黑暗中的作業也有實質上的幫助。三維雷射掃瞄儀的發明突破了以往的 傳統測量方法,能精確、大量、快速獲得被測物的表面空間資料,對於從事空間資訊建 立及分析的專家而言,無疑將是一項強大而有力的空間資訊取得的工具。 經三維雷射掃瞄儀作業後所得之資料為均勻密佈於被測物體表面的三維點資料,一 般皆以點雲(Point Cloud)稱之,每一個點資料包含著空間坐標、反射強度値等資訊。 然而單一測站往往無法完整涵蓋被測物的範圍,常需要整合多個測站的點雲資料來達成 目的,不同測站的點雲資料具有不同的參考坐標系統,因此點雲連結的問題即是求得各 測站坐標系統間的轉換關係,或轉換到相同坐標系統,目前所知的點雲連結方法有四: 共軛面轉換法、磁性覘標控制點法、測站後視稜鏡法、及曲面匹配法(曾義星、史天元, 2002)。以上四種點雲連結方法中,磁性覘標控制點法為利用相鄰測站之重疊觀測區域 裡擺設反射標當控制點,反射標主要作用是為了提供雷射掃瞄點雲資料一個明顯而且定 位精準的特徵,只要有三個以上的控制點,即可求得相連測站之三維座標轉換參數,因 此反射標的定位精度將會對點雲結合的精度有極大的影響。
一般來說,三維雷射掃瞄儀的廠商會生產原廠磁性反射標以供使用者於點雲結合者 當控制點使用,反射標中心坐標計算方法為依反射標反射強度差異篩選出反射標圓形部 分點雲,再將圓形部份所有點雲資料取其平均坐標即得,而三維雷射掃瞄儀量測所得到 的點雲資料,會因量測的環境,如空氣粒子、測物材質、顏色等而產生一些量測的雜訊, 因此反射標中心坐標也易受原始點雲中雜訊而影響其定位精度。因此本研究以提升三維 雷射掃瞄儀反射標定位精度為主要研究對象,分 30 公尺、60 公尺、90 公尺三段距離, 使用六種不同雜訊濾除方法,距離濾除法、最小角度濾除法、最適平面法、點資料平滑 化(高斯平滑、中値平滑、平均平滑)濾除反射標原始點雲中的量測雜訊點,以求得更 好的反射標定位精度。 除使用雜訊濾除方法來提升反射標定位精度外,反射標的選擇也是一個影響定位精 度之重要因素,不同的反射標會有不同的定位精度,故本研究中除使用原廠反射標外, 亦使用自製之反射標進行試驗,主要原因為原廠反射標價格昂貴且購買管道僅有生產三 維雷射掃瞄儀公司,而自製反射標成本低廉並可自行製作,若自製反射標定位精度與原 廠反射標定位精度相比較下差異性不高或甚至更佳時,對於三維雷射掃瞄儀的使用者將 是另外一種選擇,因此可利用此次實驗得到原廠反射標與自製反射標定位精度的差異; 另一原因為若以單一反射標探討雜訊濾除對反射標定位精度的影響,會顯得太過主觀, 故選用兩種反射標來當作此次實驗的對象。
1-2 研究方法
在本研究所選用的三維雷射掃瞄儀是隸屬於法國 Trimble 的子公司 Mensi 所生產 的 GS200 型,適用於中長距離的掃瞄作業;反射標為 Mensi 原廠所率定製造的反射標 (Target)與自製反射標(Object)。 本論文主要以提升反射標定位精度為研究對象,分 30 公尺、60 公尺、90 公尺三段 距離進行測試,分別對這三段距離中原廠反射標與自製反射標之原始點雲使用六種濾除 方法加以改正其定位精度,並比較在各測試距離中能改善的幅度大小及兩種反射標的定 位精度差異。定位精度可分內部精度與外部精度,故本研究主要有兩個主要作業:1.反 射標中心點位坐標內部精度差異比較;2.反射標中心點位坐標外部精度分析。 1.反射標內部精度差異 本研究於試驗場牆面上佈設原廠反射標及自製反射標,使用 GS200 型三維雷射掃瞄 儀分三段距離分別掃描原廠反射標及自製反射標,對反射標使用距離濾除法、最小角度 濾除法、最適平面法、高斯平滑、中値平滑、平均平滑共六種雜訊濾除方法濾除反射標 原始點雲的雜訊後,再利用 RealWorks Registration Target Analyzer Tool 計算出反 射標中心點位坐標。利用重複觀測,比較三種距離以及六種濾除方法對反射標內部精度 的差異,以得到原始點雲與濾除雜訊後點雲後之反射標內部精度變化,並比較原廠反射 標與自製反射標內部精度差異。 2.反射標外部精度分析 欲了解反射標外部精度,因分析反射標內部精度時已經求得三段距離中原廠反射 標與自製反射標的中心點位坐標,故先比較三段距離中六個雜訊濾除方法中各反射標中 心坐標的差異量後,再使用全測儀對反射標進行觀測,以全測儀觀測所得之坐標當做參 考已知坐標,各距離掃描原始點雲定位坐標以及各種濾除方法所得之反射標中心點位坐 標當觀測坐標作六參數與七參數轉換來進行外部精度的分析作業。
1-3 研究流程
本研究流程圖如圖 1-1,詳細步驟說明如下: 一、確定研究目標 確定本身想要研究的目標,例如本論文以三維雷射掃瞄儀為主要的研究目標。 二、文獻回顧 以研究目標為主題收集國內外相關文獻,從文獻中找出可行之研究題目及方向,探 討可行度,試圖找出合適之題目。 三、建立研究題目 經由國內外文獻回顧後,確定合適作為研究之題目,並撰寫出研究之動機與目的。 四、設計研究方法 研究題目以及研究動機與目的確定後,即可設計一可合乎流程的研究方法,擬定研 究的流程及步驟。 五、實施外業計劃 外業計劃在整個研究流程中屬最重要,外業的成果影響了整個研究的結果,因此必 須按照設計之外業計劃,按部就班完成所有外業內容。 六、成果探討 屬內業作業部分,經由外業所得之各項數據,選定合適的數學模式進行數值分析之 動作。 七、結論與建議 歸納研究成果,提出結論以及後續研究之建議。
1-4 論文架構
本論文之基本架構共分為五個章節,各章節的研究內容依序簡要概述如下: 第一章 前言 簡述本研究之動機與目的、研究方法研究流程以及論文組織架構。 第二章 理論基礎 概述三維雷射掃瞄儀系統,包含掃瞄原理、坐標系統、點雲結合、誤差來源等,並 介紹基於三控制點點雲結合方法以及本研究所用之雜訊濾除方法。 第三章 反射標內部精度 包含外業規劃、使用儀器、軟體、實驗設計與資料處理及經由內業所得之數據進行 數據分析,此章節為比較三種距離以及六種濾除方法對反射標內部精度的差異,以得到 原始點雲與濾除雜訊後點雲後之反射標內部精度變化,並比較原廠反射標與自製反射標 內部精度差異。 第四章 反射標外部精度 實驗資料處理,比較第三章所解算之反射標中心定位坐標差異量,再以全測站觀測 之反射標中心點位坐標為已知坐標值,三維雷射掃瞄儀所得原始反射標定位坐標及雜訊 濾除後之反射標定位坐標當觀測值,進行六參數與七參數坐標轉換,分析其雜訊濾除前 後之外部精度差異及觀察七參數轉換是否能提升外部精度,最後比較自製反射標與原廠 反射標外部精度。 第五章 結論與分析 根據前述之研究過程與結果分析並進行總結,以提供未來進行相關研究可供加強的 地方,歸納出數點結論與建議。第二章 理論基礎
2-1 三維雷射掃瞄儀系統
三維雷射掃瞄儀(3D Laser Scanner)能快速掃描被測物,不須佈設反射稜鏡, 儀器只需要一個立足點,即能以不接觸到物體的情況下快速獲得被測物體表面高密度以 及高精度的三維坐標,相較於傳統測量儀器是針對待測物體表面單一特徵點進行量測的 方法,三維雷射掃瞄儀更適用於需物體表面的測量,且三維雷射掃瞄儀為主動式量測, 由儀器自行發射雷射光源,在黑暗中亦可作業,是一種精確且經濟的測量工具。三維雷 射掃瞄儀主要構造為雷射測距儀,加上反射鏡進行垂直方向的掃描,水平方向則以伺服 計步馬達轉動儀來達成,可達到 360 度的掃描。目前雷射掃瞄儀掃描速度可達上千點甚 至上萬點,瞬間產生大量觀測資料,因此需要連接電腦即時儲存資料,另外掃描的範圍、 密度及一些掃描參數相關設定也需要連接電腦來設定。表 2-1 所顯示為目前市面上各種 三維雷射掃描儀相關基本資料。 表2-1 三維雷射掃描儀基本資料(李文漢,2007) 製造商 商品型號 最長掃 描距離 (m) 掃描速 度(點/ 秒) 最大掃描 角度(d) 測點精 度@距 離 敷貼 影像 模型化處理 軟體 Z+F Imager 5003 53 125000 360H 310V 13mm @50m Photo LFM MODELLER Leica HDS 4500 53 125000 360H 310V 7mm @10m Photo Cyclone 5.5 Leica HDS 3000 300 2150 360H 270V 6mm @50m Photo Cyclone 5.5 Trimble GS200 100 5000 360H 60V 1.5mm @50m Photo RealWorks Riegl Z420i 1000 8000 360H 80V 6mm @100m 3D Image 3D-RiScan Optech ILRIS-3D 2000 2000 360H 180V 8mm @100m Photo PoyWorks I-site 4400-LR 700 4400 360H 80V 70mm @100m 3D Image I-Site Studio
2-1-1 掃描原理
Boehler(2001)依據三維雷射掃描儀測量原理之不同,將其分類為時間差量測 (Time-of-flight,TOF)及三角法(Triangulation)兩種,其中三角法又分為單相機 法與雙相機法兩種,茲分別詳述如下(徐元俊,2006): (一)時間差量測(Time-of-flight,TOF) 由雷射掃描儀發射出脈衝雷射光到待測物體的表面,再接收經由待測物體表面反射 回來的訊號,計算該期間之時間長度,圖一為其量測之示意圖,由光速 c、時間△t 算 出掃描儀與物體之間的距離ρ, = cΔt 2 1 ρ 。(如圖 2-1 所示)。 採用此種方法的雷射掃描儀比起三角法(triangulation)可以測量較遠的距離, 但在近距離時,精度卻顯得較差。一般而言,誤差仍隨著距離增加而增大。市面上之雷 射掃描儀多採用這種系統,如:Trimble GS200(本研究所選用之機型)、Riegl LMS-Z420、 Cyrax2500、Optech ILRIS-3D 等。 圖2-1、時間差量測法示意圖(修改自 Boehler,2001)物體
反射稜鏡
雷射
(二)三角法(Triangulation) 此方法利用三角形幾何關係求得距離。先由雷射掃描儀發射雷射光到待測物體表 面,經由入射光與反射光之間的夾角,利用在基線另一端之相機接收物體反射之訊號, 且雷射光源與 CCD 之間的基線長度經率定已知,經由三角形幾何關係推求雷射掃描儀與 待測物體之間之距離。採用此種方法的三維雷射掃描儀在近距離的精度較時間差系統為 佳,但其最大測距範圍也較短,測距精度與本身基線長度有關。而另外一種三角法是採 用兩台各自架設在基線兩端的相機,接收經待測物體反射之訊號,計算雷射掃描儀與物 體間之距離。(如圖 2-2 所示)
(1)單相機三角量測法(Triangulation principle-single camera solution): 利用雷射光撞擊於待測點上時,瞬間由另一側之相機攝影該光點形成三角關係,而 雷射頭與相機位置為固定基線長度,藉以計算待測點之坐標位置。 λ ρ cos L = ,其中 ρ 為距離,L 代表反射稜鏡到鏡頭的基線長,λ為鏡頭與基線之間的夾角。 圖2-2、三角法:單相機法(修改自 Boehler,2001) 物體 基線 L 雷射 CCD 雷射軸向 相機軸向 反射稜鏡
(2)雙相機三角量測法(Triangulation principle-double camera solution): 利用雷射光撞擊於待測點上時,瞬間由兩側之相機攝影該光點形成三角關係,而兩 相機位置為固定基線長度,藉以計算待測點之坐標位置。ρ =L1tanλ1 =L2tanλ2 2 1 L L L= + ,其中 ρ 為距離,L 代表兩個鏡頭的基線長,λ1、λ2為鏡頭與基線之夾角。 (如圖 2-3 所示) 圖2-3、三角法:雙相機法(修改自 Boehler,2001) 雖然三維雷射掃瞄儀可分為時間差量測法與三角法,基本上三維雷射掃瞄儀仍是距 離測量的一種,因此,三維雷射掃瞄儀的誤差大小也是隨著掃瞄儀與待測物體間的距離 增加而增加。對於較近物體的測量,因為其距離較短,在時間的準確度上便會影響距離 的精度,所以在近距離測量時,三角法的精度較時間差量測法為高,反之,對於較遠物 體的測量,距離增長,角度的偏差對於距離測量影響較大,故長距離的雷射掃瞄儀多採 用時間差量測法進行。
物體
CCD
CCD
雷射
鏡頭
鏡頭
2-1-2 坐標轉換
三維雷射掃瞄儀利用雷射測距的原理,由儀器本身發射出雷射光束,接觸到物體表 面後反射再接收物體所反射之訊號,經由相位或脈衝時間差的計算,可推求出被測物與 三維雷射掃瞄儀之間的斜距(SD),配合掃瞄的水平方向角(HA)與垂直方向角(VA), 可推求得出每一掃瞄點雲與測站之水平距(HD)與高差(VD),可得到掃瞄點雲與掃 瞄儀的三度空間相對坐標差值,再配合掃瞄角度的不同,可以計算出掃瞄儀中心至測點 的三維坐標差,且可同時記錄回訊之強度值。而三維雷射掃瞄之相對坐標定位,是以掃 瞄儀的雷射光源為原點,自成一個局部坐標系統,根據右手定則,以掃瞄儀的右側為X 方向,正對目標物的方向為 Y 方向,而垂直軸方向為 Z 方向,再藉由雷射光發射和接 收的時間差和相位差,計算出雷射光源與掃瞄點之間的距離和角度,以計算出待測掃瞄 物點的相對點位坐標值。(如圖2-4 所示) 圖2-4、三維雷射掃瞄儀與物體間相對坐標系示意圖 掃瞄儀坐標系與物空間坐標系之關係可表示如圖 2-5 所示,其中 S 為掃瞄儀的位 置,P 點為待測點的位置(三維雷射掃瞄儀坐標系原點),O 點為物空間坐標系的原點。 ρ 為 S 到 P 之間的距離,α 為 S 與 P 點之間的垂直角,θ 為其水平角。 X 物體 SD VD VA HA HD Y Z 掃瞄儀圖2-5、掃瞄儀坐標系與物空間坐標系之關係圖(修改自 Lichti et al,2000) 由掃瞄坐標系轉換到物空間坐標系的數學式可寫成如公式所示,利用三個或以上的物空 間之已知控制點坐標進行轉換(Lichti et al.,2002)。 s p p Mr R → → → + = R
[
]
T p p p p x y z r = → :P 點在掃瞄坐標系中的坐標向量。[
]
T p p p p X Y Z R = → :P 點在物空間坐標系中的坐標向量。[
]
T s s s s X Y Z R = → :掃瞄坐標系原點S 在物空間坐標系的坐標向量。 M 為一分別繞 X、Y、Z 軸旋轉(ω、φ、κ)角度之旋轉矩陣。 ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎣ ⎡ − + − − − + = φ ω φ ω φ κ φ ω κ ω κ φ ω κ ω κ φ κ φ ω κ ω κ φ ω κ ω κ φ cos cos cos sin sin sin sin cos cos sin sin sin sin cos cos sin cos cos sin cos sin sin cos sin sin sin cos cos cos M 而公式 p Mrp Rs → → → + = R 亦可改寫成: ⎟⎟ ⎟ ⎠ ⎞ ⎜⎜ ⎜ ⎝ ⎛ − = → → → s p R r M-1 Rp 物空間坐標系 z x y S X Y Z ρ O yp xp zp yp xp xs ys 掃瞄儀坐標系 θ α s P zp 反射稜 zs2-1-3 誤差來源
以三維雷射掃瞄儀掃瞄後可快速得到大量密佈於被測物的點雲,但此些大量密佈之 點雲中可能含有許多種誤差,這些誤差的來源可能跟儀器自身之掃瞄震動或環境因素以 及人為操作等等原因有關。就針對可能影響點雲坐標值的誤差類型進行分類,並對這類 誤差的可能來源加以說明。依傳統測量對觀測誤差的基本概念,將這些誤差分成以下三 類: A. 錯誤(mistakes): 以人為誤差為例大多是因為儀器操作不當或數據處理步驟錯誤所造成,只要小心謹 慎便能減少此類誤差的產生。此外由於三維雷射掃瞄儀測距是由物體反射回來的訊號的 時間,透過計算得出掃瞄儀與待測物之間的距離,但是雷射遇到強反射物(如:反射覘 標)時,會在物體前端產生許多的散射點,使得三維雷射掃瞄儀獲得的回訊可能不只一 個,此稱為多路徑效應,而多路徑效應普遍發生在掃瞄強反射的物體表面、近距離對於 待測物進行掃瞄工作以及在掃瞄物體角落時發生(Runne et al,2001),亦可能會產生較 大的距離誤差,此亦為一般測量作業中所見之錯誤,通常這種較大的距離誤差可以透過 人眼判斷或是點雲濾除門檻值的設定而消除掉,但是對於產生在角落凹面較小的誤差, 便會對於點雲產生不確定的距離誤差。故為避免此些誤差通常须事後重測或重複的觀測 將有利於錯誤的偵除。 B. 系統性誤差(systematic errors): 系統性誤差則是具有系統性或規律的誤差,產生原因主要是儀器的率定不夠完善, 例如當製造廠商儀器率定工作不嚴謹或儀器長久使用未送回原廠檢俢,便容易使得儀器 掃瞄得資料有系統性誤差存在。而系統性誤差又主要有測距誤差、掃瞄角誤差、參考原 點誤差、比例尺誤差以及坐標軸方向誤差等等因素。有時環境的因素也可能會造成系統 性誤差的行為。此種誤差是可以被發現的,例如雷射光束的寬度可能提高雷射測距儀在 測距準確度上的偏移量,特別是在雷射光束在特定的入射角度,其回訊無法準確被掃瞄儀判別時所產生。這樣的誤差 ϕ ρδ ρ tan 2 = Δ ,其中Δ 為測距的誤差,ρ ρ為產生Δ 誤差ρ 所處的距離,ϕ為雷射入射角,δ 為雷射光束在待測物上產生的雷射點直徑(Lichti, 2005)。以上述為例只要在掃瞄作業前,能透過適合檢定方法來確定儀器之系統性誤並 加以校正,將可避免因誤差造成掃瞄點雲資料精度過差,而提高資料的正確性。 C. 偶然誤差(accidental errors): 偶然誤差是無法以系統性參數描述的誤差,其大小及符號呈現”偶然性”且不可預期,隨 機誤差量的統計性質通常偏向正常分佈。雷射掃瞄的隨機誤差的中誤差可由雷射測距儀 的測距精度及反射稜鏡的測角精度來推估,此中誤差直接反應儀器本身的定位能力。(賴 志凱,2004) 表2-2、三維雷射掃瞄儀的誤差分類與誤差來源
2-1-4 點雲結合
雷射掃瞄所得的初步資料是均勻密佈於被測物表面的三維點雲(Point Cloud),在 土木工程的應用上,由於目標物(邊坡、樓房等)的覆蓋或體積甚大,且建物結構往往 相當複雜,加上掃瞄距離與掃瞄範圍的限制,致使無法從單一測站將整體建築或場景完 整掃瞄,而必須結合多測站掃瞄資料以達到場景建置的完整。,則需整合多個測站所產 生的點雲來達成任務。然而由於各觀測站的參考座標系統不同,因此點雲資料的連結 (Joint)並非單純的資料合併,必須找尋得參考座標系統的轉換關係,才能解決資料結 誤差類型 產生原因 改正方式 隨機性誤差 雷射測距及測角的隨機性誤差傳撥 無法直接改正 載台不穩、人為錯誤 重複觀測偵錯 粗差或錯誤 觀測位置誤差 無法直接改正 系統性誤差 儀器校正不完善,主要有測距、掃描角、參考原 點、比例尺及座標軸方向之系統性誤差等因素所 導致 儀器檢定 數學模式校正
合的問題。目前所知的點雲連結方法有四:共軛面轉換法、磁性覘標控制點法、測站後 視稜鏡法、及曲面匹配法(曾義星、史天元,2002),以下分別描述之。 (1)共軛面轉換法 在重疊的兩群點雲裡由使用者以人機互動方式將共面(或接近共面)的點形成平 面,然後指出三個以上不平行的共軛面,由這些共軛面求出三個平移及三個旋轉的三維 座標轉換參數。此方法不需在觀測時進行任何額外的佈標或量測工作,但必須於共同的 觀測範圍內找得三個轉換平面,而且內業工作較為繁複。 (2)磁性覘標控制點法 在相連測站之重疊觀測區域裡擺設磁性覘標當成控制點,則可利用雷射對磁性覘標 的特殊反射強度自動尋得控制點,只要有三個以上的控制點,即可求得相連測站之三維 座標轉換參數。此方法須於施測時在現場將覘標擺置於適當位置,內業的工作則可自動 化。 (3)測站後視稜鏡法 雷射掃瞄器掃視到稜鏡時亦會產生特別強的反射,而能辨識之,因此可建立測站與 稜鏡之三維相對關係,可稱為後視基線。此時若能觀測得稜鏡與測站之地面座標(定義 於共同參考座標系統),則可將點雲轉換到地面座標系統。一般可利用全測站來進行稜 鏡與測站之定位測量,其應用條件是必須於掃描器上方設計有稜鏡基座,以方便架設稜 鏡讓全測站觀測。亦可應用全球定位系統(GPS)來進行稜鏡與測站之定位測量,但必須 能於稜鏡與測站上架設GPS 天線。此種連結方法之內業工作也相當自動化。 (4)曲面匹配法 若所觀測的地物具有起伏的曲面,亦可透過曲面匹配的方式結合有重疊觀測區域的 點雲資料。以目前的曲面匹配理論尚無法全自動化,必須先以人為操作方式達到近似匹 配,才能進行最佳匹配的運算。
2-2 基於三個控制點的點雲對齊方法
上面章節簡單的介紹了三維雷射掃瞄儀系統,也提及了目前所知的四種點雲連結 (對齊)方法:共軛面轉換法、磁性覘標控制點法、測站後視稜鏡法、及曲面匹配法。 其中磁性覘標控制點法即為基於三個控制點的點雲對齊方法,而實際上是將點雲結合問 題轉換為坐標變換問題,也就是將各測站之三維坐標系轉換到相同的座標系統中,此方 法中控制點的選擇以及控制點的定位精度皆會直接影響到整體點雲結合的成果優劣,因 此控制點必須能夠精準定位,使用三維雷射儀掃瞄時通常以高反射值之反射標當測量時 的控制點。本章節將詳細介紹基於三個控制點的點雲對齊方法,包括了控制點的選擇、 三點對齊坐標變換方法、三點定位的精度分析。圖 2-6 為基於三個控制點的點雲對齊方 法示意圖。 圖2-6、基於三個控制點的點雲對齊方法示意圖
2-2-1 控制點選擇
三維雷射掃瞄儀測量時,被測物往往無法於單一測站完整掃描,而必須結合多測 站的點雲資料,使用磁性覘標控制點法時,須在各測站測量時架設三個或三個以上之控 制點,對於三維雷射掃瞄儀的使用者來說,這些控制點通常以磁性覘標佈設,這些磁性 覘標又可稱反射標,因此在外業工作時,使用者應該於被測物表面上或者單一測站範圍 內設置三個或三個以上之反射標。反射標的作用是提供地面雷射掃瞄資料中一個明確可 辨識的特徵點,讓我們能夠利用反射標所提供的特徵點當做不同坐標系間點雲合併的控 制點,亦或是局部坐標系與絕對坐標系兩者之間坐標轉換的控制點。如果直接利用屋 角、窗緣等建築本身的形貌作為疊合的共軛點,則在不同測站先後兩次對同一特徵物所 選取的點位坐標勢必有一個的人為判定的誤差,而無法正確地選擇控制點,但是反射標 則可利用固定規格的尺寸和不同反射率的材質,使我們可以直接利用軟體計算功能來定 出反射標的中心座標。 反射標設計的主要原則是要能夠明確定位,其定位能力的好壞會直接影響到坐標轉 換後的成果,因此所使用之材質需對雷射光波應具有高反射性質,形狀上以使用幾何對 稱的圖形為佳,利用其對稱的特性尋找其幾何對稱中心作為反射標的特徵點,而以圓盤 狀或球狀較為常見。圖 2-7 即為 Mensi 所生產的反射標,反射標的尺寸為 15 cm × 15 cm; 中央的圓形區域為白色的強反射材質所製成,其半徑為 7 cm,以上尺寸均經過 Mensi 原廠率定後求得。 圖2-7、Mensi 生產之反射標
2-2-2 三點對齊坐標變換方法
三維雷射掃瞄儀所得的初步資料是均勻密佈於被測物表面的三維點雲資料,這些 資料均是屬於隱性資料(Implicit),對於被測物並非顯性描述(Explicit),在被測物 表面的數據化過程中,由於測站的移動造成測量坐標系統的變化,相同的位置在不同的 測量過程中,數據是不同的,但對同一個點來說,相當於從一個坐標系變換到另一個坐 標系,因此可以將問題表述為坐標系的變換問題。 三維圖形的坐標變換包括平移、比例、旋轉、錯切等幾何變換,這裡測量數據點的 對齊問題僅是平移和旋轉變換。因為三點可以表示一個完整的座標,因此多次測量數據 變換只需由三個不同的基準點就能實現。三維幾何坐標變換方法為:測量基準點 p1、p2 和 p3。第二次測量時,基準點坐標變為 q1、q2 和 q3,剛體變換可通過以下三個步驟實 現(金濤、童永光,2005): (1)變換 p1 到 q1; (2)變換向量(p2-p1)到(q2-q1)(只考慮方向); (3)變換包含三點 p1、p2 與 p3 的平面到包含 q1、q2 與 q3 的平面。 以下步驟即為坐標轉換算法,圖 2-8 為三點坐標變換示意圖: Step1 作向量(p2-p1)、(p3-p1)、(q2-q1)與(q3-q1); Step2 令 V1= p2-p1 W1= q2-q1; Step3 作向量 V3 與 W3; V3=V1×(p3-p1) W3=W1×(q3-q1) Step4 作向量 V2 與 W2; V2=V3*V1 W2=W3*V2
顯然,向量 V1、V2 與 V3 構成右手正交系,向量 W1、W2 與 W3 同樣也構成右 手正交系 Step5 作單位向量 v1=V1/|V1|, v2=V2/|V2|, v3=V3/|V3| w1=W1/|W1|, w2=W2/|W2|, w3=W3/|W3| Step6 把系統[v]的任一點 Pi 變換到系統[w],用變換關係式 Pi'=Pi+T; Step7 因為[v]和[w]是單位向量矩陣,所以[w]=[v]R,於是所求的關於[W]系統的旋 轉矩陣為 R=inv[v][w]; Step8 使 Pi'=q1 和 P1=p1,把方程式代入,可得平移矩陣 T: T=q1-p1inv[v][w]; Step9 將方程式改為 P'=Pinv[v][w]-p1inv[v][w]+q1; 圖2-8、三點坐標變換示意圖(金濤、童永光,2005)
2-2-3 三點定位的精度分析
由上述不同坐標系轉換方法可以看出,被測物點雲的對齊精度取決於三個控制點 的測量精度,另外,在相同的測量誤差的情況下,基準點的位置選取不同,也會影響被 測物的點雲結合,但如果誤差控制在一定的範圍內,這樣的坐標變換是能夠滿足點雲結 合要求的,對測量設備來說,只有具有尋點及尋邊功能的測量儀器都可用於基於三個控 制點的對齊方法。如果採用三維雷射掃瞄儀進行測量時,由於進行被測物以及控制點測 量表面掃描時,點雲也會產生誤差,這些誤差的來源可能跟儀器本身量測能力、外在環 境因素、儀器率定或人為操作等等原因有關。因此,為保證對齊精度,採用基於三控制 點之點雲對齊方法時,控制點的應該盡量遵循下列原則(金濤、童永光,2005): (1)當誤差相同時,三點構成的三角形的面積越大,相對誤差越小,即控制點的選擇距 離越遠,測量誤差對點雲數據對齊的影響越小; (2)在測量誤差呈正態分布的情況下,三條邊的誤差趨於相同,為使各個點的影響相同, 相對誤差應趨於相等,即控制點的選取應盡量接近等邊三角形。 (3)控制點的位置應盡量選擇在與外界接觸下不會產生變形的地方,反射標(控制點) 盡可能牢貼於被測物或控制點選擇位置上。 (4)同一控制點的測量,應反覆測量幾次,取多次測量的平均值,也可避免錯誤的產生, 且多次測量應盡量在相同的環境中完成。
2-3 點雲雜訊濾除方法
經三維雷射掃瞄儀量測所得到的點雲資料,會因為量測的環境,如空氣粒子所造 成的散射以及背景光源等,或者又因被測物的材質而產生一些量測誤差或是量測的雜 訊,雜訊點的存在會影響後續的點資料處理工作,包括不同視角點資料的合併、點資料 區域分割、曲線與曲面的嵌合等,雜訊點必對於被測物而言是多餘的,雜訊點必須加以 濾除或降低影響,本章節將介紹本研究所使用之各種點雲雜訊濾除方法。
2-3-1 距離、最小角度率除法
距離濾除法是以設定距離閥值(Threshold Value)作為判斷標準, 假設一個點資料與 其前後點資料的距離都過大,則此點視為雜點,此種方法較適用於排序過的點資料。如 圖2-9為一筆排序過的點雲資料,使用距離濾除法時將距離閥值設定為39mm,則點雲資 料中前後所有距離大於39mm的點資料將會被刪除。 圖2-9、距離濾除法
最小角度濾除法,此種方法適用於掃瞄線型態的點資料,如雷射掃瞄的點資料。當 一個點資料與其前後的點資料以直線相連,會形成一個夾角,如圖2-10所示。此方法利 用角度的特徵作為雜訊點的判斷依據,先固定某角度作為閥值,小於此閥值的點一律視 為雜訊點,如圖2-9的A、B 點,若將閥值設定為150度,A、B兩點將會被剔除,閥值的 選擇必須考慮點資料的曲率分佈情形。 圖2-10、最小角度濾除法
2-3-2 最適平面法
本研究選用之反射標為平坦的紙面所佈設而成,而反射標形狀上以使用幾何對稱的 圖形為佳,利用其對稱的特性尋找其幾何對稱中心作為反射標的特徵點,故本研究的其 中一種方法將採用最適平面法(徐元俊,2006)來濾除反射標原始點雲的雜訊。 空 間 中 任 意 三 點 可 組 成 一 平 面 , 而 空 間 中 的 平 面 方 程 式 一 般 均 可 簡 化 為 0 = + + +by cz d ax 的形式,其中 a、b、c、d∈R 且 2 + 2 + 2 ≠0 c b a 。此外空間中平面 E 為通過不共線的三點A(x1,y1,z1)、B(x2,y2,z2)、C(x3,y3,z3),則平面E 的方程式 可以寫成: 0 1 3 1 3 1 3 1 2 1 2 1 2 1 1 1 = − − − − − − − − − z z y y x x z z y y x x z z y y x x空間中解算平面方程式的方法有相當多種,由於點雲資料是儲存為x、y、z 三維坐標的 型式,故採用第一種方法: 0 = + + +by cz d ax ,其中x、y、z 為三維雷射掃瞄點雲坐標值;a、b、c、d 為平面方程 式各項係數。可將上式改寫為: ' ' ' ' aY b Z c X = + + 其中X',Y,Z為點雲三軸之坐標值,a',b',c'為最適平面三個參數值。 若以X 軸向進行最適平面計算工作,先假設各點雲位於同一平面,並列出下列方 程式: fit fit fit x a Y b Z c V X'+ = + + 則可得出觀測方程式: AX V L+ = 其中各矩陣表示如下: ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ = n x X X X L : : 2 1 ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ = xn x x x v v v V : : 2 1 ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ = 1 : : : : : : 1 1 2 2 1 1 n n Z Y Z Y Z Y A ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎣ ⎡ = fit fit fit c b a X 以最小二乘法計算可得:
( )
A A A L X = T −1 T 經由最小二乘計算出點雲在最適平面X 軸方向上殘差v 為: xi i fit i fit i fit xi a Y b Z c X v = + + −獲得最適平面的各項參數a 、fit b 、fit c 後,再將所有計算最適平面的點雲相對坐標值fit 帶回最適平面計算得出點雲各點相對於最適平面的距離。
點雲各點與最適平面的距離d 為: xi 1 2 2 + + + − + = fit fit fit i i fit i fit xi b a c X Z b Y a d 標準誤差(Standard Deviation)為 u n V VT x x x − = σˆ ,n=該次最適平面所用的點雲總數,u為 未知參數個數3。 若我們將點雲資料與最適平面的距離視為誤差,並假設誤差為隨機分佈且獨立,則標準 誤差(standard deviation)如下: u n d dxT x dx − = σˆ ,n=該次最適平面所用的點雲總數 同理針對Y 軸向進行最適平面計算工作,假定點雲位於同一平面,可列出下列方 程式: fit fit fit y d Z e X f V Y+ = + +
其中X ,Y,Z為點雲三軸之坐標值,dfit,efit,ffit為最適平面三個參數值,以Y 方向坐標 為觀測量,其矩陣形式亦可表示為: AX V L+ = ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ = n y Y Y Y L : : 2 1 ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ = yn y y y v v v V : : 2 1 ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ = 1 : : : : : : 1 1 2 2 1 1 n n X Z X Z X Z A ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎣ ⎡ = fit fit fit f e d X 由最小二乘法可得出:
( )
A A A L X = T −1 T經由最小二乘計算出點雲在最適平面Y 軸方向上殘差v 為: yi i fit i fit i fit yi d Z e X f Y v = + + −
獲得最適平面的各項參數dfit、e 、fit f 後,再將所有計算最適平面的點雲相對坐標值fit
帶回最適平面計算得出各點雲相對於最適平面的距離。各點雲與最適平面的距離d 為: yi 1 2 2 + + + − + = fit fit fit i i fit i fit yi e d f Y X e Z d d 標準誤差(Standard Deviation)為 u n V V y T y y − = σˆ ,n=該次最適平面所用的點雲總數,u為 未知參數個數3。將點雲資料與最適平面的距離視為誤差,並假設誤差為隨機分佈且獨 立,則標準誤差(standard deviation)如下: u n d d y T y dy − = σˆ ,n=該次最適平面所用的點雲總數 同理針對Z 軸向進行最適平面計算工作,假定點雲位於同一平面,可列出下列方 程式: fit fit fit z g X h Y i V Z + = + +
其中X ,Y,Z為點雲三軸之坐標值,gfit,hfit,ifit為最適平面三個參數值。以Y 方向坐標為 觀測量,其矩陣形式亦可表示為: AX V L+ = ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ = n z Z Z Z L : : 2 1 ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ = zn z z z v v v V : : 2 1 ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ = 1 : : : : : : 1 1 2 2 1 1 n n Y X Y X Y X A ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎣ ⎡ = fit fit fit i h g X
由最小二乘法可得出: 經由最小二乘計算出點雲在最適平面Z 軸方向上殘差v 為: i i fit i fit i fit zi g X h Y i Z v = + + −
得最適平面的各項參數g 、fit h 、fit i 後,再將所有計算最適平面的點雲相對坐標值帶fit
回最適平面計算得出各點雲相對於最適平面的距離。各點雲與最適平面的距離d 為 zi 1 2 2 + + + − + = fit fit fit i i fit i fit zi h g i Z Y h X g d 標準誤差(Standard Deviation)為 u n V V z T z z − = σˆ ,n=該次最適平面所用的點雲總數,u為 未知參數個數3。將點雲資料與最適平面的距離視為誤差,並假設誤差為隨機分佈且獨 立,則標準誤差(standard deviation)如下: u n d d z T z dz − = σˆ ,n=該次最適平面所用的點雲總數,u為未知參數個數3。 利用上面所述最小二乘最適平面計算原理,在掃瞄作業完成後將位於同一平面上之所有 點雲相對坐標匯出成X,Y,Z 格式,代入最適平面方程式,透過最小二乘平差法,可 得此平面之標準偏差。
以上述之計算原理,並利用Microsoft visual basic 6.0 進行程式撰寫,將上述理論基礎轉
為程式運算。由於最適平面以X、Y 作為觀測量進行計算時,其成果較為穩定,且精度
較佳,且最適平面精度可由單次計算推測最終何者精度較佳(徐元俊,2006),故實驗中
計算最適平面將以X 軸與 Y 軸為觀測量進行單次計算。
( )
A A A L X = T −1 T2-3-3 點資料平滑化
點資料平滑化的主要目的是消除測量雜訊,以得到更精確的點雲資料和好的特徵 提取效果,採用點資料平滑方法處理點雲數據時,應力求保持點雲數據特徵不變。所謂 平滑化,直觀上就是新數據的"波動"不超過原始數據的"波動",實際應用實不單單 要求處理後的數據要比原始數據平滑,同使要求前後兩組數據的偏離也不能過大。目前 ㄧ般常用之點資料平滑化方法有平均平滑法(Averaging)、中値平滑法(Median)、高斯 平滑法(Gaussian)三種(陳文賢,2006)。 平均平滑法(Averaging),以空間中連續三個點資料所形成三角形的重心位置取代 中間點的座標。(如圖 2-11) 圖2-11、平均平滑法(Averaging) 中値平滑法(Median),應用統計中位數方式來取樣,可有效的解決不屬於本體的資 料,方法為取三維點資料 X、Y、Z 方向的中間點 X、Y、Z 值取代中間點的位置。中值 過濾法或平均值過濾法固然可以使資料點分佈的上下振幅平坦化而達到平滑化的效 果,但過度的平滑化卻可能會破壞原資料點之間的凹凸關係。(如圖 2-12)
圖2-12、中値平滑法(Median) 高斯平滑法(Gaussian),以連續三個點所形成三角形的重心位置及中間點的位置兩 者平均值取代中間點的位置,這方法適合用於雜訊多的點雲資料,利用高斯法較不會破 壞原先資料點的空間凹凸關係特徵關係,而且不會有像平均法那樣造成平均效應。(如 圖 2-13) 圖2-13、高斯平滑法(Gaussian)
第三章 反射標內部精度
3-1 外業掃描工作規劃
本研究主要目的為提升三維雷射掃瞄儀反射標定位精度提升之研究,使用六種雜訊 濾除方法過濾反射標原始點雲雜訊,此外在反射標的選擇上除了使用Mensi 原廠率定後 所生產的反射標外,亦有自製反射標。選擇兩種反射標原因有二:一為比較原廠反射標 與自製反射標之定位精度差異性;另一原因為使用兩種反射標能得知雜訊濾除方法在這 兩種反射標上是否有相同的效應存在。 本研究所使用之三維雷射掃瞄儀為 Trimble GS200,屬中長型雷射掃瞄儀,儀器架 設方法與傳統測量儀器相同。場地的選擇上,因本外業三維雷射掃瞄儀工作時程較長, 且同一反射標需多次掃描,為避免於室外作業時,工作時程過長時外部環境的變換,如 日照等因素影響到掃描所得點雲資料穩定性,故場地選擇於國立交通大學綜合一館地下 二樓室內停車場內進行實驗。此室內停車場為一日光照射不到之區域,場地總長約為90 公尺,是本實驗所用之Trimble GS200 所可掃描之掃瞄距離內,實驗將分三段距離掃描, 分別為30、60、90 公尺。 反射標與適當試驗場確定後,即可於現地探勘、拍照、預估作業時程,規劃出整個 外業掃瞄流程。掃描流程大致上為,首先於標的物表面上佈設反射標,擺設完反射標後 於試驗場上架設三維雷射掃瞄儀,一切準備工作完成後對目標物進行掃描;並於不同距 離下對反射標進行多次掃瞄作業以進行分析作業,掃描完畢即可檢視成果是否符合預期 或有錯誤,若成果不符合預期或有錯誤,針對不符合部分或錯誤重新再掃描;若成果符 合,便可進入內業處理作業。圖3-1 為外業掃描流程圖。3-2 使用儀器、軟體說明
本論文所採用儀器為Trimble公司生產的GS200型三維雷射掃瞄儀,其儀器規格如表 3-1所示,Trimble GS200型外業操作軟體為Trimble PointScape 3.2。外業掃瞄後所得之三 維點雲資料處理以Real Works Survey 4.2進行內業處理作業,例如:掃瞄點雲讀取、點雲 切割、ascII資料格式的輸出等工作。 由於三維雷射掃瞄儀是以雷射測角、測距利用數學公式來推算物體的相對坐標值, 點雲資料可以坐標值:X、Y、Z;強度值:intensity;色階值:R、G、B格式輸出。雷 射本身亦有強度等級之分,因此儀器掃瞄點雲的精度與三維雷射掃瞄儀器雷射有效掃瞄 距離有關。圖3-2為Trimble GS200型三維雷射掃瞄儀在各不同距離時儀器之標準誤差。 表3-1、Trimble GS200型三維雷射掃瞄儀規格(Trimble,2005) 使用介面 Windows XP/NT/2000 動態放射 8bits 資料介面 筆記型電腦/PDA (TCP/IP或無線網路Wifi) 掃瞄視角 水平:360度(400g) 垂直:上、下各30度 電源 交流:AC 110-240V-50/60Hz 直流:DC 24V nominal 掃瞄速度 每秒5000點
覘標規格 20 MENSI scan targets
光點尺寸、顏色 3 mm/50 m、綠光
圖3-2、Trimble GS200 型三維雷射掃瞄儀距離與掃瞄精度關係圖(Mensi,2005)
點雲雜訊濾除方面所使用軟體為USGS Imageware12及Microsoft Visual Basic 6.0所 撰寫LiDAR點雲處理程式。Imageware12主要使用於逆向工程之應用,功能有基本點雲 操作、點資料處理、曲線生成、曲面生成、物體建模等,為一完整之逆向工程軟體,主 要使用者大多為機械類專業人士。隨著三維雷射掃瞄儀的出現,土木測量近年來也逐漸 從單純的點資料逐漸往”面”資料及3D模型發展,都有賴於三維雷射掃瞄儀大量的三維點 資料,故以往機械逆向工程方面的軟體未來皆有可能應用於土木測量中。本研究中所使 用到Imageware12的功能為點資料處理,利用軟體中點資料處理功能之平滑化、距離濾 除法、角度濾除法來處理實驗掃描所得之三維雷射點資料,而Microsoft Visual Basic 6.0 所撰寫LiDAR點雲處理程式為最適平面法處理軟體(如圖3-3)。
3-3 實驗設計與資料處理
3-1-1 實驗設計
本實驗選擇兩種反射標進行實驗,其一為原廠反射標,另一為自製反射標。原廠反 射標成本昂貴且須向原廠購買,故自製反射標考慮到便利性以及價格兩種因素,選擇以 一般紙為材質,上面印有黑白兩色圖案可利用強度值分辨紙上黑白部份,且若反射標不 足或毀壞時影印即可使用。原廠反射標可直接於外業操作時利用PointScape3.2 軟體直接 計算出其反射標中心點位坐標,自製反射標則須經由一些內業處理方可得到中心點位坐 標,但若自製反射標定位精度比原廠反射標更好時,往後作業時便可使用自製反射標進 行掃描作業,不僅可確保定位精度,也可節省成本。圖3-4 所示,左邊為自製反射標, 簡稱為Object;右邊為原廠反射標,簡稱為 Target 圖3-4、左為自製反射標(Object);右為原廠反射標(Target) 實驗地點選擇於國立交通大學綜合一館地下二樓室內停車場,本實驗選擇使用九個 自製反射標及九個原廠反射標共十八個反射覘標平貼於標的物牆面上,如圖3-5 所示。 實驗所選擇之三維雷射掃瞄儀為Trimble GS200,屬中長距離之掃描儀,停車場總長為 90 公尺,為此三維雷射掃瞄儀掃描範圍內。實驗將分三段掃描,分別為 30 公尺、60 公 尺、90 公尺,對共十八個反射標進行各十次的掃描。掃瞄距離選擇 30 公尺、60 公尺、 90 公尺主要原因為探討不同距離下六種雜訊濾除方法對反射標中心點位定位精度的影 響,故距離的選擇並沒有一定的標準存在,有差異性即可。圖3-5、自製反射標與原廠反射標佈設方式
使用三維掃瞄儀在三段距離下掃描此十八個反射標,其中一個自製反射標與一個原 廠反射標為一組掃描各十次,故有九組反射標三段距離掃描十次,共270 筆資料,資料 量龐大且複雜,故每掃描一個反射標後需檢查其數據或者掃描成果是否有錯誤;若有錯 誤可立即重新掃描,若其成果符合預期,即可繼續掃描作業。 (a) (b) 圖3-7、外業掃描點雲成果 (a)30m Obj1+Tar1 掃描一次成果 (b)30m 所有反射標掃描成果
3-1-2 實驗資料
經由Trimble GS200三維雷射掃瞄儀掃描所得之點雲資料,除了有各個點雲相對於 三維雷射掃瞄儀的三維相對坐標值X、Y、Z外,Trimble GS200型三維雷射掃瞄儀尚可輸 出各點雲之強度值(intensity),點雲強度值最小為0,最大為255;與利用儀器上之照相機 所得之色階值 R、G、B。點雲資料利用Real Works Survey 4.2將包含上述格式之資料輸 出成ASC檔案,檔案可用記事本打開,如圖3-8所示。
實驗的主要目的在於將觀測所得到的點雲資料,以上述格式輸出,其中X、Y、Z、 intensity為內業處理所需要的數據,X、Y、Z解算反射標中心點位坐標;強度值用來分 辨自製反射標圓形部份點雲資料用途。
3-1-3 內業資料處理流程
三維掃瞄儀掃瞄後之資料為原始點雲資料,由於外業掃瞄時是以整個反射標進行掃 描,故必須將欲分析部份的部份切割出來,使用工具為RealWorks 4.2 Segmentation Tool。原廠反射標原始點雲如圖 3-9(a),經處理過原始反射標圓形部份點雲如圖 3-9(b)。 自製反射標原始點雲如圖3-10(a)所示,因自製反射標未經過特殊處理過,故原始點雲資 料不像原廠反射標可直接萃取出圓形部份,根據先前研究,目標物顏色與強度值有絕對 的關係,黑色對於三維雷射掃瞄儀所掃描出的點雲強度值均偏低(0~80),白色掃瞄點雲 強度值均偏高(80~255) (李宗儒,2007) ;故尚須利用強度值(intensity)差異剔除自製反射 標上黑色顏色部分點雲後,如圖3-10(b),才能得到自製反射標圓形部份點雲,如圖 3-10(C)。 (a) (b) 圖3-9、原廠反射標點雲 (a)Target 原始點雲 (b)Target 圓形部份點雲 (a) (b) (c) 圖3-10、自製反射標點雲取得原廠反射標與自製反射標圓形部份點雲後,即可利用 USGS Imageware12 及使 用Microsoft Visual Basic 6.0 所撰寫 LiDAR 點雲處理程式對點雲進行點資料平滑化(平 均平滑、中値平滑、高斯平滑)、距離濾除法、最小角度濾除法、最適平面法共六種雜 訊濾除方法濾除反射標點雲的雜訊,圖3-11~圖 3-13 為 30 公尺原廠反射標編號 1 雜訊 濾除前後點雲圖。 圖3-11、30m Target1 圓形部份原始點雲不同視角原始點雲資料 圖3-12、六種雜訊濾除後 30m Target1 之點雲資料 (a)平均平滑(b)中值平滑(c)高斯平滑(d)距離濾除法(e)角度濾除法(f)最適平面法
圖3-13、六種雜訊濾除後之點雲資料不同視角比較圖
(a)平均平滑(b)中值平滑(c)高斯平滑(d)距離濾除法(e)角度濾除法(f)最適平面法
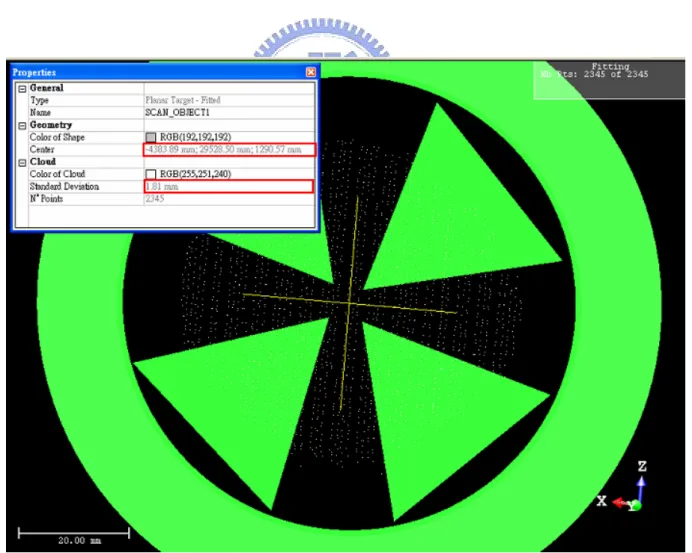
六種雜訊濾除方法處理點雲資料完畢後,便可開始解算九個自製反射標與九個原廠 反射標之定位坐標,所使用到的工具為RealWorks4.2 Registration Target Analyzer Tool。
此功能為RealWorks4.2 內建工具,主要目的為解算反射標點雲之中心點位坐標,解算方
式為將反射標圓形部份全部點雲坐標相加取平均,此功能除了解算反射標中心點位坐標
外,亦有擬合Target 平面的 RMS 值,此值越小,表示 Target 的精度越高。因此會解算
出共有三段距離十八個反射標,每個反射標有十次的中心點位坐標及RMS 值。圖 3-14
圖3-14、RealWorks4.2 Registration Target Analyzer Tool
3-4 反射標內部精度
此章節主要為探討自製反射標與原廠反射標原始點雲經過六種雜訊濾除方法後中 心點位定位坐標內部精度差異及兩種反射標之間的內部精度比較。故本章節將在試驗場 實驗及內業處理過後得到之30 公尺、60 公尺、90 公尺三段距離對每一個反射標重複觀 測十次的反射標中心點位坐標,利用重複觀測,進行資料統計與分析。 本章節主要統計分析共有以下四項:一、自製反射標與原廠反射標使用 Target Analyzer Tool 解算之擬合平面的 RMS 值,每一個反射標有十次原始擬合平面 RMS 值與 經六種點雲雜訊濾除後各十次之擬合平面RMS 值,將其取平均當成反射標的原始擬合 平面RMS 值及六種點雲雜訊濾除後擬合平面 RMS 值。二、因每一個反射標均有重複觀 測,利用重複觀測可記算每個反射標中心點位坐標標準偏差σs,σs計算方式如以下公式 3-1、3-2、3-3 所示,σs即為反射標內部精度,亦稱為精密度(Precision);每一個反射標 均會有原始點雲中心點位內部精度及六種雜訊濾除後之中心點位內部精度。三、比較擬 合平面RMS 值與中心點位坐標標準偏差 σs關係,理論上應該會有正相關的關係存在。 四、比較使用自製反射標內部精度與使用原廠反射標內部精度差異,並比較此兩種反射 標優劣。 假設有一組數據X1,……,Xn(皆為實數),其平均值為:∑
= = n i Xn n X 1 1 (3-1) 此組數據的標準偏差為:∑
= − − = n i i X X n 1 2 ) ( 1 1 σ (3-2) 利用以上公式即可求得σx、σy、σz 2 2 2 z y x s σ σ σ σ = + + (3-3)(一) 擬合平面 RMS 值:
由於反射標與使用時須平貼於標的物表面上,故經由三維雷射掃瞄儀掃描反射標之 點雲理論上應呈現出一平面點雲,但由於量測上的誤差,會造成點雲呈現凹凸不平而非 完全平面的現象產生。RealWorks4.2 Registration Target Analyzer Tool 除了計算出反射標
中心點位坐標外,也會根據反射標點雲擬合出Target 平面出來,而擬合出來的平面會因
為量測的雜訊會造成擬合平面精度上的不同,因此Target Analyzer Tool 也會計算出擬合
平面的RMS 值供使用者參考,RMS 值越低代表著此擬合平面的精度越高,也代表著點 雲資料越接近一平面。本研究分30 公尺、60 公尺、90 公尺三段距離掃描九個自製反射 標及九個原廠反射標共十八個反射標十次,且每個反射標原始點雲資料均經過六種雜訊 濾除方法處理過,表3-2~表 3-7 為三段距離自製反射標與原廠反射標十次擬合平面精 度RMS 值平均的比較。 從表 3-2~表 3-7 可以看出,自製反射標部分,30 公尺處以最適平面法改正之擬合 平面RMS 值為最佳,九個自製反射標平均 RMS 值為 0.9576mm;60 公尺和 90 公尺處 均以中值平滑法改正之擬合平面之RMS 值為最佳,九個自製反射標平均 RMS 值分別為 1.4521mm 與 2.2376mm。原廠反射標部份,在 30 公尺、60 公尺、90 公尺三段距離中均 以最適平面法所得之擬合平面RMS 值最佳,九個原廠反射標利用最適平面法後所計算 平均RMS 值分別為 0.9470mm、1.5596mm、2.0132mm。表 3-8 為 30 公尺、60 公尺、 90 公尺三段距離將九個反射標之擬合平面 RMS 值平均所得之表格,並將之以折線圖表 示,如圖3-17 所示。從圖表中可以看到,不論是自製反射標或者是原始反射標,所選 用之六種點雲雜訊濾除方法都可降低擬合平面的RMS 值,也代表著這六種雜訊濾除方 法確實能提升擬合平面的精度;而其中以中值平滑法及最適平面法為最佳,最差者為角 度濾除法。

![圖 2-5、掃瞄儀坐標系與物空間坐標系之關係圖(修改自 Lichti et al,2000) 由掃瞄坐標系轉換到物空間坐標系的數學式可寫成如公式所示,利用三個或以上的物空 間之已知控制點坐標進行轉換(Lichti et al.,2002)。 p spMrR→→→=+R [ p p p ] Tpxyzr→= :P 點在掃瞄坐標系中的坐標向量。 [ p p p ] TpXYZR=→ :P 點在物空間坐標系中的坐標向量。 [ s s s ] TsXYZR=→ :掃瞄坐標系原點 S 在物空間坐標系的坐標向量](https://thumb-ap.123doks.com/thumbv2/9libinfo/8037587.161723/23.892.263.680.129.498/或以上物空間之已知控制點坐標進行轉Lichti→=+向量坐標TsXYZR=→掃瞄.webp)