使用模糊邏輯之雙足機器人即時平衡控制系統設計
118
0
0
全文
(2) 使用模糊邏輯之雙足機器人即時平衡控制系統設計 The Development of Real-Time Balance Control System in Biped Robots Using Fuzzy Logic Algorithm. 研 究 生:邱耀賢. Student:Yao-Hsien Chiu. 指導教授:胡竹生 博士. Advisor:Dr.Jwu-Sheng Hu. 國 立 交 通 大 學 電機與控制工程學系 碩 士 論 文. A Thesis. Submitted to Institute of Electrical and Control Engineering College of Electrical Engineering and Computer Science National Chiao Tung University in partial Fulfillment of the Requirements. for the Degree of Master in. Electrical and Control Engineering June 2006 Hsinchu, Taiwan, Republic of China. 中華民國九十五年七月.
(3) 使用模糊邏輯之雙足機器人即時平衡控制系統設計 研究生:邱 耀 賢1. 指導教授:胡 竹 生 博士2. 國立交通大學電機與控制工程研究所碩士班. 摘 要 長久以來,即時平衡一直是雙足機器人急需解決的重要課題。傳統上解決平 衡問題之作法為利用動態方程式與逆向運動學來獲得機器人目前重心與相對姿 態,但此作法複雜且運算量龐大,只適用於使用高運算能力處理器之機器人。為 了解決此問題,本論文使用運算能力較為低階之微處理器(PIC-18F452)為控制核 心,以仿鴕鳥構造之雙足機器人『PAPA-Man』為研究發展平台。成功提出一個以 ZMP 觀點搭配智慧型演算法-模糊邏輯的平衡方法,並且發展出一套機器人雙足 穩定之分散式平衡控制系統架構,藉此能即時適應於不同地形與斜面。機器人並 協同以 Visual Basic 設計 pc 端人機介面的操控軟體-『Balance Control Agent』 ,透 過此視窗介面,可即時觀看目前機器人重心位置而下達行為操控之指令;進一 步,本研究整合二足步行機器人之電子模組與電腦端之軟體通訊,實現即時平衡 之適應能力。本設計亦同時希望以此達到低成本、高效率及高擴充性之優點。. 1 2. 國立交通大學電機與控制工程研究所碩士 國立交通大學電機與控制工程系教授,新竹市大學路 1001 號,Tel:886-3-5712121ext54318 i.
(4) The Development of Real-Time Balance Control System in Biped Robots Using Fuzzy Logic Algorithm Student: Yao-Hsien Chiu. Advisor: Dr.Jwu-Sheng Hu. Institute of Electrical and Control Engineering National Chiao Tung University. ABSTRACT Real-time balance in biped robots is an important research issue to be solved. Traditionally, inverse kinematics from dynamic equations is solved to obtain the centre of gravity and the gesture of the robot. But the computing effort induced from the complicated technique prohibits the realization of the real-time balance. In this thesis, an intelligent control algorithm using fuzzy logic and ZMP is developed to achieve real-time balance. Our research is implemented on a biped robot named “PAPA-Man” whose mechanical architecture mimics an ostrich. The goal of the system is to make the robots balance on different landforms and incline. Further, a “Balance Control Agent” is designed using Visual Basic as the control interface. The software computes the location of the central gravity synchronously and sends commands to the robot for balance control. This work integrates the electronics and firmware of the biped robots with the communication software on the personal computer to realize the ability of real-time balance. Other objectives such as low cost, high efficient and easy to expand are also considered.. ii.
(5) 誌 謝 交大研究所兩年的燦爛時光,深深感謝胡竹生教授對我悉心的指導,感謝入 學時能有緣從電子 IC 組跨組而成為老師的研究生。老師不僅給予我學術上的啟 發,更教導我一個研究生應有的研究態度、解決問題實事求是的精神與深入思考 的方法。或許漫長的學生生涯,隨著本論文的完成暫時劃下了句點,但相信老師 所帶給我的影響,不論在求學或是工作上,將是受用無窮。 而在研究生涯裡,感謝 905 實驗室的學長姐、同學和學弟們的協助與陪伴。 首先感謝機器人組博士班的頭頭立偉,不僅對本論文提出許多建議與指導,在我 徬徨時所給予的鼓勵,更使我多了一份堅持的力量!還有號稱史上最強的博士价 呈、熱愛漫畫與健身的劉大人、有很多正妹好友的宗敏、萬事通的安喬、胃不好 的帥哥士奇、愛碎碎念的群棋、風度翩翩的興哥、有許多網友的晏榮、很少吃飯 的鏗元和實驗室一姊的岑思,一起奮鬥畢業的同學螞蟻、鳥蕙、永融、恆嘉、朱 木和佩靜,有了你們的陪伴,讓原本平淡無奇的研究生活增添許多歡樂。另外也 謝謝研究所與大學部的學弟弘齡、楷祥、Alphar、正剛和阿吉,有您們則使研究 生活更多采多姿。亦感謝大學好友們真摯的友情,使我研究生活以外的世界更添 色彩。此外,感謝美玲長久以來關懷體貼的陪伴,貼心的鼓勵和不變的支持是我 完成學業的動力。 除此之外,還要感謝曾經幫助我以及輔助過我的人,感謝上天讓我一路平 順,讓我可以如願取得碩士學位。 最後,謹將此論文獻給我的家人,感謝父親邱富明先生、母親江美瑩女士含 辛茹苦的栽培與教養,不斷鼓勵我學習成長,不論是學業、待人處事上,我若有 任何一點成就都要歸功於您們!謝謝您們!. iii.
(6) 目 錄 中 文 摘 要 ........................................................................................................i 英 文 摘 要 .......................................................................................................ii 誌 謝 ................................................................................................................. iii 目 錄 ..................................................................................................................iv 圖 目 錄 ............................................................................................................vi 表 目 錄 ............................................................................................................ix 第一章 緒論 .......................................................................................................1 1.1 研究背景.......................................................................................................1 1.2 動機與目的...................................................................................................2 1.3 文獻探討.......................................................................................................3 1.3.1 雙足機器人之系統模型 ...................................................................3 1.3.2 雙足機器人之軌跡規劃 ...................................................................4 1.3.3 雙足機器人之零力矩點 (Zero Moment Point) ...............................5 1.3.4 雙足機器人之智慧控制 ...................................................................7 1.3.5 雙足機器人之開發實例與應用 .......................................................8 1.4 論文架構.......................................................................................................8 第二章 系統架構與通訊介面 .........................................................................11 2.1 雙足機器人『PAPA-Man』之機械本體 ...................................................11 2.2 『PAPA-Man』系統設計 ...........................................................................15 2.3 『PAPA-Man』之硬體架構 .......................................................................18 2.4 『PAPA-Man』致動器配置 .......................................................................21 2.5 『PAPA-Man』之通訊介面 .......................................................................24 第三章 即時平衡控制系統 .............................................................................29 3.1 機器人平衡之重要因子- ZMP ..................................................................29 3.1.1 傳統上 ZMP 點之推算 ...................................................................30 3.2 『PAPA-Man』 ZMP 點之實現 ................................................................33 3.3 閘道伺服層智慧型平衡演算之實現.........................................................39 3.3.1 模糊控制器程式演算流程 .............................................................40 3.3.2 控制器輸入與輸出之歸屬函數 .....................................................41 3.3.3 模糊規則庫......................................................................................43 3.3.4 模糊推論與解模糊化 .....................................................................48 3.4 ZMP 控制法則 ...........................................................................................49 第四章 平衡穩定性之改進 .............................................................................55 4.1 Data Moving Average .................................................................................55 4.2 智慧型馬達速度控制.................................................................................58 iv.
(7) 4.2.1 軟體速度控制..................................................................................58 4.2.2 模糊速度控制..................................................................................60 第五章 控制介面與實驗結果 .........................................................................65 5.1 控制介面軟體『Balance Control Agent』................................................65 5.2 軟體功能介紹.............................................................................................69 5.3 實驗平台架設與數據分析.........................................................................70 5.3.1 實驗平台架設..................................................................................70 5.3.2 數據分析..........................................................................................75 5.4 即時平衡實驗之連續圖.............................................................................98 第六章 結論與未來發展 ...............................................................................102 6.1 結論與貢獻...............................................................................................102 6.2 未來發展與建議.......................................................................................103 附錄 輸出變數 Δθ 之歸屬函數 .................................................................104 參考文獻 .........................................................................................................106. v.
(8) 圖 目 錄 圖 圖 圖 圖 圖 圖 圖 圖 圖 圖 圖 圖 圖 圖 圖 圖 圖 圖 圖 圖 圖 圖 圖 圖 圖 圖 圖 圖 圖 圖 圖 圖 圖 圖 圖. 1-1:單質量倒單擺模型(左)、雙質量倒單擺模型(右) ........................................4 1-2:控制流程圖與最佳化步態軌跡圖..................................................................5 1-3:ZMP 於雙腳支撐相之運算結果 ....................................................................5 1-4:簡化後之雙足機構以及單腳穩定區域 ZMP 位置圖 ...................................6 1-5:適應性類神經模糊系統之架構(ANFSI) .......................................................6 1-6:智慧型之控制架構..........................................................................................7 2-1:人類步行之運動模式 (小腿往後彎) ...........................................................11 2-2:鴕鳥步行之運動模式 (小腿往前彎) ...........................................................12 2-3:雙足機器人 PAPA-Man 正視圖(左) 與 後視圖(右) 之機械製圖.............12 2-4:PAPA-Man 左前視圖(左) 與 左後視圖(右) 之 3D 模擬繪圖...................13 2-5:機器人方向 Roll、Pitch、Yaw 座標示意圖 ..............................................14 2-6:PAPA-Man 機構自由度組合圖(左)、自由度說明圖(右)............................14 2-7:PAPA-Man 雙足機器人完成之實品圖 .........................................................15 2-8:三層式機器人系統設計架構........................................................................15 2-9:『Artificial Brain(人工頭腦)』硬體架構....................................................15 2-10:Motor board 之設計規劃圖(左) 與 硬體實施完成圖(右) .......................19 2-11:Sensor board 之設計規劃圖(左) 與 硬體實施完成圖(右) ......................20 2-12:Motor &Sensor board 之設計規劃圖(左) 與 硬體實施完成圖(右) ........20 2-13:PAPA-Man 之配電設計 ..............................................................................21 2-14:DS1013 數位伺服機外觀(左) 及 內部金屬齒輪構造(右).....................22 2-15:伺服馬達訊號輸入圖..................................................................................23 2-16:機器人與電腦端之藍芽通訊網..................................................................25 2-17:無 線 藍 芽 模 組 對 RS-232 轉 換 器 ........................................................25 2-18:益眾藍 芽 轉 換 器 之 靭 體 修 改 程 式 ......................................................27 2-19:PAPA-Man I2C 通訊網路架構圖 ................................................................28 3-1:腳掌之 ZMP 點與力矩分佈狀態 .................................................................29 3-2:雙足機器人連續動作中 ZMP 維持穩定之範圍 .........................................30 3-3:機器人腳底平面之受力狀況........................................................................33 3-4:ZMP 點之受力規劃圖...................................................................................34 3-5:Force Sensing Resistors 實體圖與其形狀規格 ...........................................35 3-6:Force Sensing Resistors 構造分析圖 ............................................................35 3-7:Force Sensing Resistors 壓力對電導特性圖 ...............................................36 3-8:FSR 於『PAPA-Man』腳底規劃配置圖 ......................................................36 3-9:FSR 於『PAPA-Man』腳底實際配置圖 ......................................................37 3-10:閘道伺服層與 FSR 轉換電路.....................................................................37 vi.
(9) 圖 圖 圖 圖 圖 圖 圖 圖 圖 圖 圖 圖 圖 圖 圖 圖 圖 圖 圖 圖 圖 圖 圖 圖 圖 圖 圖 圖 圖 圖 圖 圖 圖 圖 圖 圖 圖 圖. 3-11:平衡控制系統方塊圖..................................................................................39 3-12:模糊控制器方向示意圖..............................................................................40 3-13:模糊平衡控制器內部程式演算流程圖......................................................41 3-14:輸入變數 E 之歸屬函數圖 .........................................................................42 3-15:輸入變數 Ezmp 之歸屬函數圖.....................................................................42 3-16: 輸出變數 Δθ 之歸屬函數圖.........................................................................42 3-17:ZMP 控制過程圖.........................................................................................49 3-18:單腳站立時理想 ZMP 點示意圖 ...............................................................51 3-19:雙腳站立時理想 ZMP 點示意圖 ...............................................................51 3-20:左右平衡的馬達角度計算..........................................................................52 3-21:雙足機器人 PAPA-Man 於地面左傾、右傾時之模擬平衡 3D 圖 ...........53 3-22:前後平衡的馬達角度計算..........................................................................53 4-1:Data moving average 的資料流程圖 ...........................................................56 4-2:馬達的線性分割控速....................................................................................59 4-3:馬達的指數分割控速....................................................................................59 4-4:速度控制系統方塊圖....................................................................................61 4-5:馬達段速與補償角度之對應圖....................................................................63 4-6:控速過程的速度變化示意圖........................................................................64 5-1:ZMP 視窗軟體-Balance Control Agent ........................................................65 5-2:雙足機器人左右腳 ZMP 點座標移動分析圖 .............................................68 5-3:機器人即時平衡數據量測之整體實驗平台................................................70 5-4:電動翹翹板之 PC 端程式操控視窗介面.....................................................71 5-5:傾斜儀實體與其規格....................................................................................72 5-6:陀螺儀(Gyro)實體與其規格.........................................................................73 5-7:雙軸傾斜儀 X 軸與 Y 軸即時偵測傾斜角度視窗......................................73 5-8:陀螺儀(Gyro)即時偵測角速度視窗.............................................................74 5-9:實驗平台實際架設於雙足機器人 PAPA-man..............................................74 5-10:機器人站立姿態水平 0 度之穩定比較圖..................................................76 5-11:慢速左右傾斜 5 度之穩定比較圖..............................................................77 5-12:慢速左右傾斜 10 度之穩定比較圖............................................................77 5-13:慢速左右傾斜 15 度之穩定比較圖............................................................78 5-14:慢速左右傾斜 20 度之穩定比較圖............................................................78 5-15:慢速左右傾斜 25 度之穩定比較圖:........................................................79 5-16:中速左右傾斜 5 度之穩定比較圖..............................................................79 5-17:中速左右傾斜 10 度之穩定比較圖............................................................80 5-18:中速左右傾斜 15 度之穩定比較圖............................................................80 5-19:中速左右傾斜 20 度之穩定比較圖............................................................81 5-20:中速左右傾斜 25 度之穩定比較圖............................................................81 vii.
(10) 圖 圖 圖 圖 圖 圖 圖 圖 圖 圖 圖 圖 圖 圖 圖 圖 圖 圖 圖 圖 圖 圖 圖 圖 圖 圖 圖 圖 圖 圖 圖 圖 圖 圖 圖 圖 圖 圖. 5-21:快速左右傾斜 5 度之穩定比較圖..............................................................82 5-22:快速左右傾斜 10 度之穩定比較圖............................................................82 5-23:快速左右傾斜 15 度之穩定比較圖............................................................83 5-24:快速左右傾斜 20 度之穩定比較圖............................................................83 5-25:快速左右傾斜 25 度之穩定比較圖............................................................84 5-26:站立姿態傾斜 0 度之安定比較圖..............................................................86 5-27:慢速左右傾斜 5 度之安定比較圖..............................................................86 5-28:中速左右傾斜 5 度之安定比較圖..............................................................87 5-29:快速左右傾斜 5 度之安定比較圖..............................................................87 5-30:慢速左右傾斜 10 度之安定比較圖............................................................88 5-31:中速左右傾斜 10 度之安定比較圖............................................................88 5-32:快速左右傾斜 10 度之安定比較圖............................................................89 5-33:慢速左右傾斜 15 度之安定比較圖............................................................89 5-34:中速左右傾斜 15 度之安定比較圖............................................................90 5-35:快速左右傾斜 15 度之安定比較圖............................................................90 5-36:慢速左右傾斜 20 度之安定比較圖............................................................91 5-37:中速左右傾斜 20 度之安定比較圖............................................................91 5-38:快速左右傾斜 20 度之安定比較圖............................................................92 5-39:慢速左右傾斜 25 度之安定比較圖............................................................92 5-40:中速左右傾斜 25 度之安定比較圖............................................................93 5-41:快速左右傾斜 25 度之安定比較圖............................................................93 5-42:站立姿態下傾斜 0 度之左右腳 ZMP 平衡位置圖 ...................................94 5-43:慢速左右傾斜 5 度之左右腳 ZMP 平衡位置圖 .......................................95 5-44:中速左右傾斜 5 度之左右腳 ZMP 平衡位置圖 .......................................95 5-45:快速左右傾斜 5 度之左右腳 ZMP 平衡位置圖 .......................................96 5-46:慢速左右傾斜 10 度之左右腳 ZMP 平衡位置圖 .....................................96 5-47:中速左右傾斜 10 度之左右腳 ZMP 平衡位置圖 .....................................97 5-48:快速左右傾斜 10 度之左右腳 ZMP 平衡位置圖 .....................................97 5-49:『PAPA-Man』於右邊傾斜 20 度之即時平衡實驗分解圖 ........................98 5-50:『PAPA-Man』於右邊傾斜 30 度之即時平衡實驗分解圖 ........................98 5-51:『PAPA-Man』於左邊傾斜 45 度之即時平衡實驗分解圖 ........................99 5-52:『PAPA-Man』於前方傾斜 30 度之即時平衡實驗分解圖 ......................100 5-53:『PAPA-Man』於前方傾斜 20 度之”單腳”即時平衡實驗分解圖...........100 5-54:『PAPA-Man』受到未知外力”拉力”之即時平衡實驗分解圖.................101 5-55:『PAPA-Man』受到未知外力”推力”之即時平衡實驗分解圖.................101 0-1:機器人右傾對 ZMP 位置變化關係圖 .......................................................104 0-2:機器人左傾對 ZMP 位置變化關係圖 .......................................................105 0-3: 輸出變數 Δθ 之歸屬函數圖.........................................................................105 viii.
(11) 表 目 錄 表 表 表 表 表 表 表 表 表 表 表 表 表 表. 1-1:論文研究之架構流程....................................................................................10 2-1:PAPA-Man 硬體設備規格表 ........................................................................13 2-2:DS1013 數位伺服機硬體規格表..................................................................22 2-3:藍 芽 轉 換 器 之 規 格 ...................................................................................26 2-4:靭體修改程式說明........................................................................................27 3-1:左右腳之座標規劃表....................................................................................37 3-2:x 方向評分判定之模糊規則表.....................................................................45 3-3:x 方向經二維模糊切割之規則表.................................................................46 3-4:x 方向之模糊控制規則表.............................................................................46 3-5:y 方向之模糊控制規則表.............................................................................47 3-6:x 方向 49 條規則之模糊規則表...................................................................47 3-7:dzmp(x)、dzmp(y)與所受馬達影響之關係 ..................................................52 4-1:馬達段速之 look-up table..............................................................................61 4-2:馬達段速規格表............................................................................................62. ix.
(12) 第一章 緒論. 1.1 研究背景 機器人之研發已是廣為重視的科學,從以往發展的數十年中,世界上也已經 有許多專家學者提出相關的研究成果。而機器人的種類,隨著各類地形需求,一 般可分成輪式、軌道式和多腳式機械人等,但是無論如何,近似人類二腳步行模 式的雙足機器人仍舊是多數人關心之項目與研究發展之目標。不同於軌道式僅能 在固定的軌道中、輪式在平坦無障礙的環境下移動;雙足式機器人除去了地形環 境上的限制之後,具有非常高之機動性,不論是轉彎、避障或上下階梯等,皆以 雙足機器人表現的較為出色及有效率。 其實人類雙足運動是一件相當複雜的動作行為,實體化的完成更需要高度機 電整合的實務性研究,其結合了電子工程、結構力學、控制工程、機器人學、仿 生學、商業設計等學門而成。由於研發包含各種領域,因此雙足式機器人的發展 一直是各國研究人員的挑戰課題,也是宣揚各國科技發展的重要指標,特別是日 本等國對於高階機器人已經列入禁止輸出技術,可窺見其重要之一般。其主要的 研究內容有:機械人機構設計,步態規劃,步行軌跡,平衡及控制方法,智慧型 控制理論等。 二足步行機器人除去了地形環境上的限制之後,以其高自由度與靈活度的狀 態下,便可代替或協同人類處理各種事務,不僅能節省時間、更可提高工作效率。 不管是人體無法勝任惡劣環境下之未知區域的探勘,還是枯燥乏味的重覆性工作 等,甚至隨著高齡化社會的來臨,亦可驅使照顧老年人或病人。因此機器人對於 未來人類社會的獻貢在被高度期待下吸引了許多不同領域人士的投入,也更值得 現今的我們深入研究與發展。. 1.
(13) 1.2 動機與目的 由上節可知雙足機器人的研究內容主要包括了 1.機械人機構設計 2.步態規劃 3.步行軌跡 4.平衡及控制理論 5.人工智慧等,每一項皆是可以單獨分開詳細研究 的龐大主題,但縱觀此些項目可發現,機器人的各種動作不管是步態規劃還是步 行軌跡,都離不開”穩定性”這項議題,機器人若具有良好的穩定性,則不論各種 設計,都能發揮其最佳的效益。由此可推想,探討穩定性最直接的方式就是研究 其”平衡及控制理論” 。 在以往的文獻中,傳統擁有高階運算能力、高自由度的機器人往往本身造價 昂貴且不容易發展和使用。而現今人形機器人的運動模型發展,不外乎模仿生物 型態的運動軌跡為探討基礎、PID 控制以及倒單擺運動模型來完成步行運動行為 的實現。因此深究傳統解決平衡問題之方法,初始化的步足軌跡的獲得往往是一 個繁瑣的工作,其必須仰賴數學化的幾何空間描述,利用動態方程式與逆向運動 學所獲得機器人目前重心與相對姿態來反覆修正真實的機器人運動而獲得其平 衡的姿態。這過程中往往會遇到 Inverse kinematics 求解過程無解的困難情況。另 外在運動學分析重心過程必須要考慮到所有的板件重量、瞬時速度、瞬時角速度 等分佈細節,此作法複雜且運算量龐大、耗時,難以達成及時平衡之目的。因此 可知以往對於小型且低階運算之機器人的即時平衡控制理論議題並無一定或是 特定有效之方法;本論文即先由此平衡議題著手並且以仿鴕鳥構造之雙足機器人 『PAPA-Man』為發展平台,從近幾年來所提出的 ZMP 觀點搭配智慧型演算法模糊系統,發展出一套機器人平衡控制的系統架構,即時適應於不同地形與斜 面。並協同以 Visual Basic 設計 pc 端人機介面的操控軟體-『Balance Control Agent』,透過此視窗介面,即時觀看目前機器人重心位置並下達行為操控之指 令,目的為以模組化的方式,整合二足步行機器人之電子模組與電腦端之軟體通 訊,實現雙足機器人即時平衡於不同地形與斜面之適應能力。. 2.
(14) 1.3 文獻探討 此節之文獻探討,主要是對本論文研究相關之機器人發展歷程做一個回顧與 討論。首先針對雙足機器人之系統模型與控制理論進行相關之研究及探討;其次 涉獵二足機器人軌跡規劃、ZMP 零力矩點及智慧型控制理論等相關文獻,最後參 考國內外雙足機器人之開發實例與應用,希望從此獲取助益,使本研究之機器人 系統架構更趨於完善。. 1.3.1. 雙足機器人之系統模型. 1. Golliday and Hemami (1997) Golliday and Hemami[1]於 1997 年以 Lagrangian 的動態理論,推導出無膝蓋 (Kneeless)雙足運動機器人之數學模型。此方式將機器人系統以數學模型線性 化,簡化其原本複雜之非線性系統,而能以較簡易的方式分析其穩定性(stability)、 可控制性(controllable)及可觀察性(observable)。 2. Miyazaki and Arimoto (1980),Furusho and Masubuchi (1986) Miyazaki and Arimoto[2]、Furusho and Masubuchi[3]、Napoleon et al. (2002)[4] 等學者,將雙足步行機器人模擬成倒單擺(Inverted Pendulum)系統與雙質量倒單擺 模型,機器人的步行運動就像是以支撐腳為連桿,腰際重心為擺錘,為一連串的 倒單擺運動,如圖 1-1 左[4]所示。但此時並沒有考慮到遊擺腳之狀態,直到 1998 年,John H. Park and Kyoung D.Kim[5]提出以倒單擺模型為基礎,並考慮了遊擺 腳之動態,事先規劃遊擺腳的路徑並同時配合倒單擺 ZMP 之軌跡,最後可減少 成當只有一個倒單擺時的誤差,如圖 1-1 右[4]所示。由此可知,控制機器人之穩 態平衡與步行運動視同為倒單擺平衡的分析,可適度地簡化數學模型與非線性系 統,而更易於模擬分析,但由於只能滿系統定性分析上的需求,因此尚有不能被. 3.
(15) 用來設計實際機器人之缺點。. 圖 1-1:單質量倒單擺模型(左)、雙質量倒單擺模型(右). 1.3.2. 雙足機器人之軌跡規劃. 1. Vukobratovic (1970) Vukobratovic[6]使用數值方法計算產生雙足步行機器人動態步行之軌跡,但 是因為步行所需的參考軌跡計算運算量太大,相對地,所耗時間也長,幾乎不能 即時適應地形的變化,除非未來軌跡產生演算法則被簡化或者處理器運算速度加 快,否則以數值方法產生機器人步行軌跡還是存在著微處理器運算速度太慢或是 價格太過昂貴之問題。 2. Tesuro Kitazoe (1994) Tesuro Kitazoe[7]運用非監督式的學習法則來規畫雙足機器人之行走軌跡,考 量如何於達成最佳行為模式後再繼續保持,並藉由分析雙足之間的動作對應關係 以定義評估步行模式之準則。 3. Shih and Zhu (1991) Shih 和 Zhu 等學者[8]提出雙足機器人步態軌跡最佳化之方法。透過牛頓-尤 拉(Newton-Euler)方法推導出系統的動態模型,最對目標函數進行最佳化,求得零 力矩點 ZMP 與單腳支撐區域中心之最小誤差,用以產生一最佳的步態軌跡,其 步態軌跡與控制流程如下圖 1-2 所示: 4.
(16) 圖 1-2:控制流程圖與最佳化步態軌跡圖. 1.3.3. 雙足機器人之零力矩點 (Zero Moment Point). 1. Takanishi and Ichiro Kato (1991) 機器人使用零力矩點(ZMP)如圖 1-3 來控制其穩定度。ZMP 最早是由日本早 稻田的教授所提出的[9]。Takanishi 和 Ichiro Kato 實作之雙足機器人 WL-12RIII 設計了步行運動控制器,並以零力矩點作為判斷步行穩定之準則。. 圖 1-3:ZMP 於雙腳支撐相之運算結果 5.
(17) 2. Kim and Oh (2000) Kim and Oh 等[10]提出一最簡化之二足步行機器人機構設計,從圖 1-4 可看 出其最小自由度以及連桿狀態,恰符合正常行走之最簡機能。除此之外,並利用 ZMP 的控制法則,對機器人進行姿態軌跡控制與調整動態步行穩定度,以防止傾 倒之發生。. 圖 1-4:簡化後之雙足機構以及單腳穩定區域 ZMP 位置圖. 3. D. Kim, S.-j. Seo and G. –T. Park (2005) D. Kim 等學者[11]利用壓力感測器(Force Sensing Resistors, FSR),量測已規 劃好的雙足機器人步行軌跡之 ZMP 變化值,並且用適應性的類神經模糊系統 (adaptive neuron-fuzzy system,ANFS)來 model ZMP 的軌跡變化。如圖 1-5 所示, 利用 ANFS 來最佳化模糊系統的歸屬函數值與模糊法則。此方式證明用類神經系 統所判斷出 ZMP 的值與用 FSR 所量測出之 ZMP 是相近的,但由於使用類神經 網路,故仍然有系統複雜且需要大量訓練資料之缺點。. 圖 1-5:適應性類神經模糊系統之架構(ANFSI) 6.
(18) 1.3.4. 雙足機器人之智慧控制. 1. M. Y. Cheng and C. S. Lin (1995) M. Y. Cheng 和 C. S. Lin [12]使用基因演算法(Genetic Algorithms,Gas)來搜尋 5 連桿雙足機器人系統中最佳化之步態設計參數。相對於傳統的最佳化法是以微分 為基礎,作單目標最佳化的設計,且在面對複雜系統會因微分不易而導致限制過 多與容易落入區域最佳點之缺點;基因演算法則是不需作微分處理的零次單目標 最佳化設計法則(Zero-order optimization),且能隨機、平行的搜尋以求得全域最佳 解。最後此篇以模擬的方式,顯示以一定義好的步伐在崎嶇表面或地形上能用較 高速的方式步行。 2. Hani Hagras, Victor Callaghan and Martin Colley (1999) Hani Hagras 等學者[13]結合基因演算法則和模糊邏輯推論,對移動式機器人 之控制系統進行即時線上學習之發展。此控制法則藉由感測資訊之回授,用於同 步修改模糊邏輯系統以縮小搜索參數範圍值,故可快速收斂線上行為之學習。 3. T. Fukuda and Y. Komata (1997) T. Fukuda 與 Y. Komata 等學者[14]提出適應性多變環境之智慧型控制。利用 機器人感測元件訊號回饋,進行機器人穩定性之 ZMP 計算,並將此值輸入至基 因遺傳法則以求取最佳參數解;同時,訓練其類神經網路,得到一組最佳權重值, 以此權重之網路作遞迴運算,而可得到最佳化速度與角度值,使機器人系統具控 制強健性(Robust)與地形適應性。其智慧型之控制架構如圖 1-6 所示。. 圖 1-6:智慧型之控制架構 7.
(19) 1.3.5. 雙足機器人之開發實例與應用. 目前國內外已有不少研究機構發表實例成果,如美國南加大與 MIT、日本、 韓國…等大學機器人實驗室之研究用實體機器人,以及國際知名廠商如日本 HONDA 公司生產的 Asimo 及 SONY 公司生產的 Qrio 等,皆先後完成商業化雙 足機器人之原型製品,茲略舉如下:. 1 .Kato 和 Takanishi[9](1973) 設 計 了 世 界 上 首 次 能 步 行 運 動 的 雙 足 機 器 人 (WL-5),並在 1983 年設計了由靜態步行轉而能動態步行之半動態步行機器人。. 2. Furusho 和 Sano[15]設計的一系列 Biper-型雙足步行機器人,利用機器人上的 感測器量測步行之步態訊息。. 3. Honda 公司[16]於 1986 年開始研究,歷經十四年研發以及七代實驗機型 (E0-E6;1986-1993)和三代原型機型(P1-P3;1992-1997),家庭式機器人 Asimo 於 2000 年 10 月 31 日誕生[17]。. 4. Sony 公司推出的 Qrio[18],其利用各種知覺感測和記憶學習功能,實現了高運 動性和豐富互動能力的小型二足步行娛樂機器人。. 1.4 論文架構 本文研究架構如附表 1-1,共分五章,茲分述如下: 第一章為緒論,說明本篇論文之研究背景、動機與目的,簡述本論文之寫作 架構並對相關研究之機器人發展歷程做一個回顧與討論。. 8.
(20) 第二章為系統架構與通訊介面,闡述『PAPA-Man』之設計概念與機械本體製 造,並探討內部仿人腦之系統、三層架構設計與機器人對內、對外之通訊介面。 第三章為即時平衡控制系統,為本論文之核心重點,首先瞭解影響機器人平 衡之重要因子 ZMP 後,並藉由智慧型演算法-模糊邏輯來操控此平衡因子以達到 所預期機器人之最佳姿態,完成雙足機器人即時平衡控制系統設計。 第四章為機器人穩定性分析,我們藉由上一章所設計出之成果,進一步探討 機器人即時平衡動作上之穩定性,並提出以非主動性-Data Moving average 與主動 性-智慧型馬達控速兩種方式相互配合,改進機器人整體穩定性。 第五章為控制介面與實驗結果,結合前兩章所設計之成果,協同以 Visual Basic 設計 pc 端人機介面的操控軟體-『Balance Control Agent』 ,透過此視窗介面, 操控者能即時觀看目前機器人重心位置並下達行為操控之指令,增進了人機互動 的機制,並結合此視窗軟體,使機器人能擴展多元化的功能。最後此章分析機器 人即時平衡控制之實驗數據特性並將其實際實驗結果作一個相互驗證。 第六章為結論與未來發展,本文的貢獻為完整的以智慧型演算-模糊邏輯之方 式配合 FSR 電路擷取目前機器人之 ZMP 點,並進一步探討機器人之穩定性,建 立機器人即時穩定平衡系統;更有別於傳統 ZMP 演算之機器人,具有遭受到不 明外力後仍可自我保持平衡之優點。最後對本論文之研究做一個總結,闡述其設 計優點與未來發展。. 9.
(21) 表 1-1:論文研究之架構流程. 第一章. 緒論. 描述本論文研究之背景、設計之動機與目的。. 第二章. 系統架構與通訊介面. 闡述『PAPA-Man』之設計概念與機械本體製造,並 探討內部系統、分散式架構設計與機器人對內、對 外之通訊介面。. 第三章. 即時平衡控制系統. 首先瞭解影響機器人平衡之重要因子 ZMP 後,藉由 智慧型演算法來操控此平衡因子以達到雙足機器人 即時平衡控制系統設計。. 第四章. 平衡穩定性之改進. 進一步探討機器人即時平衡之穩定性,並提出以非 主動性 Data Moving average 與主動性智慧型馬達控 速的方式改進機器人之整體穩定性。. 第五章. 控制介面與實驗結果. 以 PC 端操控軟體來分析機器人即時平衡控制之實 驗數據特性。並實際建立一量測之實驗平台,藉以 驗證先前提出理論之正確性與即時平衡之能力。. 第六章 結論與未來發展. 10.
(22) 第二章 系統架構與通訊介面 本章節將介紹雙足機器人『PAPA-Man』之機構設計、系統架構與通訊介面。 由於本論文之機器人系統架構採模組化觀念設計,因此本章先縱觀『PAPA-Man』 的系統架構,之後章節再針對各模組分別進行深入介紹。. 2.1 雙足機器人『PAPA-Man』之機械本體 傳統上,仿人形之雙足機器人,其設計特點為模仿人類的雙足構造,採取小 腿往後彎之型態(如圖 2-1 所示)。因此,許多雙足機器人的步行控制研發也是 遵循此種架構。但深入研究人體的雙足運動後,可發現人類在步行運動時通常需 要同時以雙手來維持身體與雙腳的平衡,而目前所開發之多數雙足機器人,為了 簡化其機構與運動模型,通常將上半身與雙手之機構省略不計,但此機構設計已 和人體平衡的機制有所違背;令人不禁產生一個疑問,是否仿人二足之雙足機器 人在平衡與步行上為最良好之設計呢?. 圖 2-1:人類步行之運動模式 (小腿往後彎)[19][20]. 反觀自然界的生物,可以發現有許多雙足動物的架構並不是如同人類小腿般 只能夠往後彎曲。像是鴕鳥,其小腿即只能向前彎曲(如圖 2-2 所示)。然而生 物演化至此特徵上,可觀察到鴕鳥等的雙足生物擁有許多人類所沒有運動上的優 點特性,其一就是鴕鳥的生理結構使其運動速度可達到時速 72 公里,比人形體. 11.
(23) 態運動快的多,且在跳躍上活動能力較強。更值得一提的是,小腿往前彎曲的結 構使其在跌倒後能方便獨自以雙腳爬起,並不像人形的動物般必須仰賴雙手輔助 平衡才可直立站起。這一點在機器人科學上是很重要的特性,藉此我們可以不需 設計多餘的雙手來輔助雙足機器人,亦可以達到平衡之效果。. 圖 2-2:鴕鳥步行之運動模式 (小腿往前彎)[19][21]. 因此,雙足機器人『PAPA-Man』系統之機構設計模仿鴕鳥之生物骨骼構造, 充分融合其運動上步行與靈活跳躍之優點,為一創新的雙足機器人結構設計(如 圖 2-4 所示)。一般可知由於機器人的動力來源-馬達,其重量會隨著額定的力矩 而增加,因而存在著動力大小與負載相互對立的情況,所以機器人本體結構一般 以重量輕、體積小且剛性強為設計目標;由於仿鴕鳥之雙足生理架構,使 PAPA-Man 本身機構上亦有節省空間以及減輕馬達負載重量與成本之優點。 17 cm 11.5 cm. 5.5 cm 19 cm. 4 cm 4.5 cm. 11.5 cm. 2 cm 11.5 cm. 圖 2-3:雙足機器人 PAPA-Man 正視圖(左) 與 後視圖(右) 之機械製圖. 12.
(24) 本論文以『PAPA-Man』為發展平台,PAPA-Man 之製作流程為構想設計、自 由度配置,並根據致動器與感測器的尺寸、受力與結構,再以 3D 機構繪圖軟體 設計,進行動態的模擬與測試,試驗確定可行性後,最後則進行實體機構之製造, 如圖 2-4 所示,表 2-1 則為 PAPA-Man 之硬體規格。. Sensor Interface Controller. Multi-Motor Controller. motors x 12. Bluetooth. Force Sensor Resistor. 圖 2-4:PAPA-Man 左前視圖(左) 與 左後視圖(右) 之 3D 模擬繪圖 表 2-1:PAPA-Man 硬體設備規格表. 設備 自由度 高度 總重量 控制晶片 量測裝置 致動器 電源供應. 規格 Pitch 軸 2*2, Roll 軸 3*2, Yaw 軸 1*2 25 cm 2500 g Microchip PIC 18f452(8bit 30MHz) 0.2 Inch FSR*6 (Phidgets Inc.) RC servo motors (ACE DS1013 ) 6V for motors, 5V for control. 在自由度配置方面,首先定義三個轉動方向 Roll (滾動)、Pitch (擺動) 和 Yaw(搖動),如圖 2-5 所示。 Roll:沿著此軸作旋轉,會造成機器人機身前後晃動 (Ankle & Hip) Pith:沿著此軸作旋轉,會造成機器人機身左右擺動 (Ankle) Yaw:沿著此軸作旋轉,會造成機器人機身順或逆時滾動 (Pitch & Hip) 13.
(25) 圖 2-5:機器人方向 Roll、Pitch、Yaw 座標示意圖. PAPA-Man 共擁有 12 個自由度,如圖 2-6、圖 2-7,每一個滾筒皆代表一個 自由度的方向。左右之腳踝(Ankle)皆有 Roll 和 Pitch 兩個自由度,左右膝蓋(Knee) 皆有 Pitch 一個自由度,而左右髖部(Hip)則皆有 Roll、Pitch 和 Yaw 三個自由度, 因此左腳右腳各為 6 個自由度,故雙足機器人整體為 12 個自由度。. 圖 2-6:PAPA-Man 機構自由度組合圖(左)、自由度說明圖(右). 最後並且根據 Modified Link Parameters 的方法來定義連桿座標軸(frame),即 關節 i 是連接連桿 i-1 到連桿 i 的關節,座標(XYZ)i-1 的原點設在關節 i 的軸線 上,座標軸的設定需依照下列規則:. 14.
(26) (1) Zi-1 軸與關節 i 的軸線重合。 (2) Xi-1 軸在關節 i 軸線指向關節 i+1 的公法線上。 (3) 座標軸(XYZ)i 的原點在 Xi 軸跟 Zi 軸的交點上。 (4) Yi 軸用右手定則決定。 機器人在行走時,腳掌必定會貼緊地面,所以以腳掌中心為座標原點,圖 2-6 (右)即定義以 PAPA-Man 右腳腳掌為座標原點。. 圖 2-7:PAPA-Man 雙足機器人完成之實品圖. 2.2 『PAPA-Man』系統設計 深究現有的機器人電子控制系統之網路整合技術,我們發現傳統高階機器人 為了整合聲音、影像、運動控制與多個 Sensors 回授等複雜且龐大之資訊,主要 採取了 PC-Base、DSP、單晶片等架構為基礎。然而,PC-Base 等架構本身即需要 一個複雜作業系統和應用程式去整合,架構本身之性能同時也限制了機器人交錯 協調之控制能力與硬體計算之擴充。高複雜度更同時造成系統耗電與資源低重複 利用率的問題;除此之外,造價昂貴的成本為其最大之缺點(例如:ASIMO Robot)。 15.
(27) 另一方面以 DSP 及單晶片等架構為基礎之機器人系統往往容易面臨擴充不 便、對上下層資訊連結整合不易以及通訊協定不統一的繁瑣問題。因此近幾年科 學文獻上為了解決相類似的難題,提出的技術為 OPEN-R BUS 架構(例如: SONY 所屬之 QRIO、AIBO、SDR-3X、SDR-3X 等 robot 皆是此架構)。但由於 OPEN-R BUS 其頻寬僅有 12Mbps,且有系統不普遍與熟悉發展系統人數不多之缺失,故 目前仍期待有所改進。 因此為一個多軸控制雙足機器人設計軟硬體、韌體、電子電路系統本身是一 件複雜的問題。而技術上要組合如此複雜的控制系統會帶來幾個難題:1.多種類 sensor, actuator, CPU 之組合造成網路系統高複雜度、2.多種介面間通訊系統不易 整合、3.開發語言及分散式軟體計算技術和工具需要一個統一的整合協定、 4.網 路拓樸架構須有容易擴充的特性。為了克服上述困難,機器人之系統設計充滿了 挑戰性,很明顯必須在系統需求與技術瓶頸之衝突下擁有重大突破。因此本論文 在系統設計上注入新的組織系統的想法,我們試著從大自然中尋找解決途徑,在 研究哺乳類動物大腦內部的神經元之網路型態緊密分布後[22],本研究決定以此 為系統架構 (見圖 2-8) 。此架構是模仿人類的大腦,小腦和神經網路建置,運用 I2C 網路技術為神經通訊骨幹,將所有系統以 Master、Slave 的方式佈置成基本的 階層式架構。此階層架構主要可分三層: 1. Control and Sensing Layer(控制感測層) 2.Gateway Layer (閘道伺服層) 3. Internet Layer(網際網路層)。茲說明如下:. 圖 2-8:三層式機器人系統設計架構 16 16.
(28) 1.Control and Sensing Layer(控制感測層): 控制感測層如同脊椎動物的動器及受器,此層之核心為馬達控制器,整層由 多個馬達、Tilt、Gyro、Accel 等各種感測元件(偵測速度、聲音、影像等)所構成。 這些感測資訊為即時的(Real-Time),其資料種類繁多且運算量龐大,故獨立分散 為一層。其位於 I2C 網路中之 Slave 端,可運用 I2C 網路將感測運算後之結果與 資料封包整合與統一傳送到上層 Master 端(網際網路層),因此上層系統或使用者 只要知道封包格式和意義便可以輕鬆獲得控制感測層量測之運算結果而加以判 斷處理。此外,上層也可透過 I2C 網路直接對馬達控制器下達馬達操控之指令。 2.Gateway Layer (閘道伺服層): 閘道伺服層可視為機器人小腦,為本論文核心之發展重點,猶如人類小腦一 般,其負責機器人的即時平衡控制。本論文所發展之智慧型即時控制演算即運作 在此層。此層核心為 Fuzzy 平衡控制器,由 Sensor 電路板與壓力感測器 (FSR) 構 成,主要功能除了能得知目前機器人之重心與 ZMP 點外,還能即時偵測目前地 面環境的傾斜資訊。經由此層的平衡控制器運算,最後再把運算結果之 ZMP 資 料封包,利用 I2C 網路傳送到上層 Master 端(網際網路層),網際網路層接收此 ZMP 資訊後即會統籌決定該如何平衡運作,並將最後的判斷指令利用 I2C 網路傳達給 控制感測層的馬達控制器,致動馬達而保持機器人機身之平衡。 此閘道伺服層亦提供了網際網路層間的資訊整合,我們可以將其稱為一個 Robot Agent,其整合了上層與下層的資訊,簡化了上層溝通的訊息。如小腦一般, 統籌了許多具即時性且相當重要的反應訊息,並且分散了大腦端之運算量,讓上 層系統不需額外花時間處理,使得許多重要事情可以同步運作。 3. Internet Layer(網際網路層): 網際網路層之核心為 Motor&Sensor 電路版,其位於 I2C 網路的 Master 端。 網際網路層可視為機器人之大腦,為機器人決策之司令,其主要是對下層 Slave. 17.
(29) 端透過 I2C 網路所傳來之資訊作一個統整處理與命令判斷,並把決定好之結果經 由 I2C 網路將指令封包分別傳送到下層欲操控之 slave 端而命令其動作。除了對 內可經由 I2C 朝下層下達行為操控之指令外,若遭遇到難以判斷之資訊或運算量 過於龐大之處理,則可透過對外通訊如藍芽或網際網路將現有高速計算資源系統 整合起來(例如:桌上電腦、PDA、3G 手機、叢集伺服器等)。每一台計算系統都 可視為一顆腦神經元,由網路所組成的叢集式系統提供網際網路層可觀的擴充 性、無限大的記憶空間、計算能力和系統資源,而可對傳來之資訊做一週詳處理。 故綜合上述,此三層猶如人類的腦部神經系統結構組織,其中控制感測層為 人類的感測和運動神經叢集;而閘道伺服層則如同小腦操控平衡反應與整合即時 資訊,且分散大腦長時間之運算;最後網際網路層如大腦般對下層資訊作一個統 整處理與命令。在此三層架構下運用 I2C 網路 / Bluetooth 通訊使其達到更適合於 網路計算之環境,並擁有高傳輸率、高容錯性、高度系統整合之能力,且依機器 人功能需求,具有擴充 Slave 端而不影響其整體架構之優點;而低成本分散式架 構也提高了運算效率並同時達成即時通訊之能力,使得複雜的交錯協調控制簡 化,也更容易與叢集系統連結,因而降低研發門檻,節省模擬開發成本。. 2.3 『PAPA-Man』之硬體架構 如先前所述,PAPA-Man 之硬體架構為模仿哺乳類動物大腦小腦與神經網路 的運作,其精神上為專司即時反應及資料訊息之總管,不著重高速計算而在於資. 圖 2-9:『Artificial. 18 Brain(人工頭腦)』硬體架構。 18.
(30) 訊高度的整合與傳遞。因此我們亦稱此架構為『Artificial Brain (人工頭腦)』 ,圖 2-9 為實際之硬體架構;而控制感測層、閘道伺服層與網際網路層三層則以本實 驗室機器人團隊自行研發的三塊控制電路板為核心,分別為 motor board、sensor board 與 motor & sensor board,如上節所述,於各層中各司其職。每塊電路板皆 使用 8bit 的微控器「Microchip PIC18F452」來做電路板的處理核心,30Mhz 的 工作頻率則使機器人有較為省電之好處;其內建 AD 模組,方便用來讀取感測器 的輸出電壓,並經由 RS232 或是無線網路將輸出資訊回傳給電腦,即可在電腦端 顯示目前位置、速度、角度等感測資料。PIC18F452 有 PORT A、B、C、D、E, 5PORT 共有 34 個輸出入接腳可以使用,並規劃其周邊而擁有 RS232、I2C BUS、 I/O 與讀取感測器之能力。由於將系統簡化以 8bit-MCU 來整合整體架構,所以 系統本身亦有成本低廉之優點。 以下再分別對所使用之三塊電路板作一簡單之介紹: Motor board (控制感測層): 利用 PIC18F452 的 PORT B、D 輸出 PWM 訊號來控制馬達轉角,共可控制 16 顆馬達,藉此來控制機器人之動作;此外,也可接受感測器的量測輸入。而馬 達的電源跟 PIC 的電源分開輸入,則可避免馬達內部的電感對電源產生突波,影 響 PIC 的電源供應。. RS-232 指令輸入. 圖 2-10:Motor board 之設計規劃圖(左 ) 與 硬體實施完成圖(右). 輸出 PWM 訊號 給伺服馬達. 19.
(31) Sensor board (閘道伺服層): 本論文核心之模糊控制演算與壓力感測計(FSR)即在此塊板子完成,AD 資訊 擷取主要用來讀取壓力感測計的壓力輸出資料,其使用 PIC18F452 內建的 AD 模 組,可以轉換 FSR 的類比輸出電壓成數位值。. 圖 2-11:Sensor board 之設計規劃圖(左) 與 硬體實施完成圖(右) 8 組 A/D Pin 腳 特別設計的 Tilt 與 Gyro 角位 可供 Sensor 轉換. Motor & Sensor board(網際網路層) 前兩塊電路板之功能整合,為 I2C 網路中之 Master,因此接收到 I2C 下層 slave 端之資訊後即可在此區作運算決策,並同時可再經由 RS232 或是無線網路模組傳 給電腦叢集做複雜運算;在此特別設置了一個外接 EEPROM 的腳位,若大腦端 的資訊一時過於龐大,可另儲存於此外接記憶體。. 圖 2-12:Motor &Sensor board 之設計規劃圖(左) 與 硬體實施完成圖(右) 20. 外接記憶體.
(32) 為了達到機器人完全無線之設計,因此要考慮其電源配電之問題。三塊電路 板配電皆吃 5V 的直流電,以圖 2-13 (b)之廣營 GWS 所生產 11.1v/1300mAh 鋰電 池,轉接圖 2-13 (a)之變壓器模組後即可產生 5v 的直流電,因此把三塊電路板電 源串接以共地。同理,伺服馬達的配電也是類似,只是變壓器轉出的電壓為 6v。. (a) 配電之變壓器模組. (b) 娌電池. 圖 2-13:PAPA-Man 之配電設計. 最後,神經網路方面則運用先進的 RS232、I2C 資料傳輸以及 Bluetooth 技術, 用來作為多馬達控制板(Motor control board)和感測器模組(Sensor board)的溝通匯 流排。當要測試電路板的功能時,主要使用 RS232 跟電腦溝通,使用方便。當放 在機器人上使用時,可以透過 Bluetooth 跟無線模組溝通,透過無線方式傳送資 料給電腦。經由這樣的整合規劃,系統便擁有良好的周邊應用和上下層溝通的能 力;至於較詳細之機器人對內與對外通訊,則容後 2.5 節再加以敘述。. 2.4 『PAPA-Man』致動器配置 目前機器人所採用的動力來源為分散式直流伺服馬達,所謂分散式指的是在 機器人的各個關節上安置一致動器,如圖 2-6,每個自由度上皆配置馬達,由馬 達牽動連接於關節兩側的骨架,使得機器人的動作改變。在馬達的選配上採用市 售動態模型的 DS1013 伺服馬達,它包含一顆高轉速的直流馬達、減速齒輪組,. 21.
(33) 用以提高輸出扭力,以及 PID 控制電路。從外界觀之,它只有兩條正、負電源 輸入和一條白色控制轉角的 PWM 訊號輸入線,可由微控制器產生 PWM 訊號 來操作伺服馬達的角度。伺服馬達的外觀和內部構造如下圖 2-14 所示:. 圖 2-14:DS1013 數位伺服機外觀(左) 及 內部金屬齒輪構造(右) [23]. DS1013 數位伺服機為國產雷虎公司出品的高扭力數位伺服機系列[24],動力 中心採用高速高扭力無核心馬達,搭配全金屬齒輪,提供高速、高扭力、高精準 度反應,適合競賽與高階數位伺服機需求(硬體規格如表 2-2 所示),其優點如下。 1.全金屬材質驅動齒輪。 2.數位式控制核心機板。 3.高散熱效率鋁合金材質外殼。 4.高扭力、低耗電量無刷馬達。. 表 2-2:DS1013 數位伺服機硬體規格表. DS1013數位伺服機 扭 距 速 度 齒輪材質 軸承樣式 重 量 外殼尺寸. 規格 13.0(kg/cm) 0.108(sec/60°) @ 6V 金屬*4pcs 滾珠軸承 62g 40.4x20.0x37.9(mm). 22.
(34) 所謂 PWM 訊號即 Pulse width modulation 的縮寫,是一種常用於微處理器 控制類比電路的調變技術。顧名思義它是以脈衝寬度來承載資訊,如圖 2-15 所 示,所在意的是維持高電位的時間 ( 即脈衝寬度 ) ,而與脈衝之間隔無關。典 型的 RC 伺服控制信號 PWM 週期為 18~22 msec,duty cycle 安全範圍為 0.75~2.25 msec ,臨界值 0.5~2.5msec,若信號超出臨界範圍時,伺服機則有燒毀之可能。. 當 Duty cycle 小於此 虛線寬度時,伺服馬 達將 Release 放鬆. 圖 2-15:伺服馬達訊號輸入圖. 由於 Servo motor 是以 PWM 信號的 Duty cycle 來控制其轉動角度,但若由上 層的閘道伺服層或是網際網路層直接以 PWM 訊號來指揮各顆伺服馬達,勢必 會造成多項困擾,諸如必需持續產生多顆馬達的 PWM 訊號,以使伺服馬達的 位置固定,抵抗外力的推移;而持續、多頻道的 PWM 訊號將會佔用大量的通 訊頻寬,不符合經濟效益。再者經過長距離的傳輸,訊號恐將造成延遲,或被干 擾的現象,使得操作不易。為了改善這些缺點,因此目前『PAPA-Man』所發展的 三層架構中,控制感測層的馬達控制器,與伺服馬達一同安置於機器人身上,一 來可就近產生 PWM 訊號保持伺服馬達的轉角正確位置,而不用佔據大量的通 訊頻寬;二來即使馬達控制器與上層 ( 外界 ) 之間發上通訊干擾、斷訊,仍可 持續產生正確的 PWM 訊號,維持機器人正常的姿態,而不會做出超出預期以 外的動作,以致意外的發生。 本論文所使用之馬達控制器中,PIC 單晶片提供兩個硬體 PWM,但為了控 23.
(35) 制 12 顆馬達,兩個硬體中斷是不夠的,為了能達到同時控制 12 個馬達的效果, 所以利用 timer 中斷來做軟體式 PWM。其中之軟體設計有幾個要點: (1) 如何製造高精確度的脈衝寬度,若能在 Duty cycle 之間切出愈多區間,則就 能提高伺服馬達的角度控制精密度。 (2) 脈衝之間隔亦為考量之一,當脈衝輸入伺服馬達並被識別後,就會促使其內 部馬達出力保持伺服馬達齒輪組的輸出端在脈衝波的對應位置。 因此若能縮短脈衝之間隔,則表示馬達停止出力的時間縮短,相對地提高伺 服馬達的輸出動力。但過短的脈衝間隔將導致伺服馬達的不穩定,造成輸出轉軸 抖動,甚至扭力下降。至於拉長脈衝間隔則會使得伺服馬達動力輸出較為疲軟。. 2.5 『PAPA-Man』之通訊介面 在本論文中,機器人之通訊介面分為兩種,第一種是機器人對外的通訊連 結,第二種則是機器人本身對內之網路通訊,茲分別介紹如下: 對外通訊:藍芽( Bluetooth) 目前市面上已有許多資訊產品使用藍芽通訊技術,包括個人電腦、手機、 PDA … 等,這意謂藍芽通訊顯然已成為一種趨勢。這樣的潮流下,在機器人上 安裝藍芽通訊功能,除了順應潮流之外,更可以達到與各項眾多的藍芽資訊產品 交換資訊形成網路。由於藍芽無線技術主要是涵蓋低成本、低電力無線電介面的 個人區域網路 ( PAN ) ,在 2.4 ISM 頻寬中操作,並以即時 ( real time ) 傳遞數 據資料與語音訊號。不同於無線區域網路 ( WLAN ) ,它是以較大的資料流量和 較長的傳輸距離為特色,缺點就是比低功率的藍芽通訊較為耗電。以目前雙足機 器人「PAPA-man」的情況,操作範圍大都在 10 公尺之內 ( Bluetooth class 2) , 而且希求省電以達較長時間的運作,這項要求也就因應在機器人上裝配藍芽通訊 的另一個理由。. 24.
(36) 圖 2-16 為機器人與電腦端之藍芽通訊網,可知機器人是以網際網路層 Master 端與外界電腦溝通。這是一種雙向溝通的機制,當機器人的 Master 大腦端獲取底 下 slave 端的資訊而有所判決處理後,可同時透過藍芽將資訊送到外界電腦,在 外部電腦端做進一步後端的複雜運算;相對的,若使用者想傳達指令給機器人, 亦可透過電腦端的程式界面,以藍芽傳輸,傳遞操控指令給機器人的 Master 端。. 圖 2-16:機器人與電腦端之藍芽通訊網. 目前控制伺服器的微控器 PIC 18F452 具有對外以 UART( RS232 ) 的通訊 能力,因此建構藍芽通訊上採取較簡便的方式完成。採用益眾公司出品的無線藍 芽模組對 RS-232 轉換器,具有將 RS232 轉換為藍芽通訊的能力,如下圖所示:. RS-232 DSUB- 9(母) 連接於電腦 端. RS-232 DSUB-9 (公) 連結於機器 人. 狀態燈號 圖 2-17:無 線 藍 芽 模 組 對 RS-232 轉 換 器 [25] 25.
(37) 此藍芽轉換器各具有一個 RS-232 DSUB-9(公) 、RS-232 DSUB-9(母)連接 器,可與 RS-232 設備連結,達成藍芽無線通訊。下表為此轉換器的規格[25]: 表 2-3:藍 芽 轉 換 器 之 規 格. 項目 電源 藍芽版本 鮑率 調變方式 頻帶 功率 靈敏度 工作溫度 天線. 規格 5伏 1.1版 可更改,最高115200 bits/s GFSK 2.400~ 2.4835 GHz Class 1 - 82 dbm +5 ~ +55 ℃ 內建隱藏式天線. 目前網際網路層 Motor & Sensor 電路板安置於機器人身上,並擁有 RS-232、 IC2…等內外通訊功能,利用其中的 RS-232 通訊和無線藍芽模組對 RS-232 轉換 器,即可在機器人建立起對外藍芽通訊。而在客戶端方面也需具備一個 RS-232 通訊埠,轉接至另一個無線藍芽模組對 RS-232 轉換器,如此便完成客戶端的藍 芽通訊建構。在此種藍芽通訊建構上,雖然較方便、快速,但相對地自由度也較 少,必需使用相同的一對藍芽轉換器才行,不像只要客戶端具有藍芽通訊功能即 可建構藍芽通訊網;雖然藍芽轉接器只能彼此之間互相連線而已,並不能對外連 線,但其安全性與保密性則相較為高,不易受到資料資竊取與雜訊干擾之影響。 此外,機器人端和客戶端所使用的藍芽轉接器雖然外觀、硬體是相同的,但在靭 體上是不同的。客戶端所用的是”master”的靭體;而機器人端則是用”slave”,兩 者是不同的。在機器人端和客戶端通電後,屬”master”的藍芽轉接器會主動 與”slave” 的藍芽轉接器建立連線而開啟通訊。 此藍芽轉接器是可以透過電腦程式和 RS-232 通訊完成靭體的修改,該廠商 所提供之修改程式[25]如下圖所示:. 26.
(38) 圖 2-18:益眾藍 芽 轉 換 器 之 靭 體 修 改 程 式. 藍芽轉接器所提供更改的項目很多,如裝置的名稱、修改的版本…等。與通 訊方面相關之設定則如下表: 表 2-4:靭體修改程式說明. 欄位 Role. 說明 設定該藍芽連接器是"master",還 是"slave"。1.1版 UART 中設定停止位元的長度。 UART 中傳輸速度的設定,最高到 119200 bits/s 填入連入對方轉接器的地址 填入本機轉接器的地址. Stop Bit Baud Rate Peer Address Local Address. 因此我們可知,利用此藍芽轉接器所建立的藍芽通訊系統是一種簡單的結 構,且比起一般使用藍芽模組所建立的藍芽通訊網,還有其他的藍芽裝置並無法 切入藍芽轉接器之間通訊之優點,在某種程度上可增加保護性與安全性,故為 PAPA-Man 機器人之分散式系統建構於此種通訊方式上的重要原因。. 27.
(39) 對內通訊: I2C PAPA-man 機器人的三階層人工頭腦架構便是以 I2C 界面為內部神經網路, 使各階層相互溝通,傳遞重要的封包資訊。一般而言,單晶片有串列匯流排與平 行匯流排兩種與周邊設備溝通的傳輸方式,常見的串列匯流排包括三線式的非同 步串列通信(RS232)和同步串列通訊(SPI)、與兩線式同步串列通訊(I2C/USB)等。 I2C 是 Inter-Integrated Circuit 的縮寫,原始目的是用於電路板上 IC 之間的 通訊,由 Philips 於 1980 年代所發展的雙向兩線式串列匯流排標準[26],具有 I2C 界面的元件彼此只需要兩條線便能傳輸資料,較平行傳輸架構之可靠性與安全性 更佳,且節省空間與成本,通訊速度可達 1 MBit/sec,通訊距離一般低於數公尺, 但加上放大器後亦可達數十公尺之遠。. I2C 優勢: 依照功能之 需求,可擴 充其 Slave 端而不影響 其整體架構. 圖 2-19:PAPA-Man I2C 通訊網路架構圖. 如圖 2-19 所示,為 PAPA-man I2C 通訊網路架構。I2C 的 SCL 線是用於產 生時脈 clock, SDA 的線則用以資料傳輸。圖中以網際網路層為 Master,其餘各 層則在 Slave 的工作模式下,每個 Slave 必須有自己唯一的位址(偶數值) ,Master 先對 I2C 上所有元件廣播,並送出所要溝通元件的位址,所指定的 Slave 開始與 Master 連線進行溝通、資料傳遞,其餘 Slave 不作回應,溝通結束後回到初始狀 態,等待下一次動作。當 Master 要對 Slave 寫入資料時,是先送出位址(一個 偶數值) ,而 Master 讀取 Slave 時,則是送出位址+1(一個奇數值) 。故利用 I2C, 即可依機器人功能之需求,具有擴充低成本的 Slave 端而不影響整體架構之優勢。 28.
(40) 第三章 即時平衡控制系統 接下來的章節為論文發展之核心重點,首先瞭解影響機器人平衡之重要因子 ZMP 後,利用 FSR 壓力感測器來獲取機器人即時 ZMP 點,接著藉由智慧型演算 法則來操控此平衡因子以完成雙足機器人之即時平衡控制系統設計。. 3.1 機器人平衡之重要因子- ZMP 在對雙足機器人作平衡的控制分析前,首先要瞭解影響機器人平衡之重要因 子為何,而零力矩點 ZMP(Zero Moment Point)的觀點從提出至今已有三十餘年 了,現在已經成為機器人步行控制與平衡分析中最主要的方法之一,像 ASIMO 與 QRIO 的行走也都是依據 ZMP 來達成,只是詳細的應用方式有所不同。 下圖 3-1[27]表示人類在接觸地面時腳上的反作用力分佈情形,若將地面的 反作用力集中於 P 點,則可定義出正向力 N 與力矩 M。若 P 點位在地面上,且 此點周圍不管是由內力或重力所產生的淨力矩皆為零,即可定義 P 點為零力矩點 (ZMP)。. 圖 3-1:腳掌之 ZMP 點與力矩分佈狀態. 同理,將上述定義套用在雙足機器人可知,當機器人在活動時,各桿件會產 生加速度而具有慣性力。假設全部桿件的合力矩由地面一反作用力矩相互抵消 29.
(41) 後,地面反作用力作用之點仍在腳掌內,即表示全部桿件的合力作用在腳掌範 圍,因此機器人穩定且不傾倒。故單腳支持時,ZMP 使機器人保持平衡的範圍為 圖 3-2 所示深灰色領域的支持腳腳掌內;雙腳支持時,ZMP 則只要在圖 3-2 所 示淺灰色領域內的所有色塊即可,其中深灰色區塊是機器人單腳腳掌的幾何形 狀。由上述可知,ZMP 可隨著機器人連續性或非連續性的行動方式而改變,當 ZMP 落在這些範圍內就表示此步行機器人可以很穩定的行走,ZMP 落在範圍之 外,則很有傾倒之可能。除此之外,ZMP 與安全範圍間的關係可以視為一種相 對穩定度的分析方法。當離安全範圍越遠,其越接近不穩定狀態;當越靠近安全 範圍中心時,越遠離不穩定狀態,因此本論文所控制機器人之 ZMP 點,皆是使 其設法靠近安全範圍中心,而接近理想穩定之狀態。. 圖 3-2:雙足機器人連續動作中 ZMP 維持穩定之範圍. 3.1.1. 傳統上 ZMP 點之推算. 傳統上推算 ZMP 點,是利用 Kinematic Chain 的方式來推導 ZMP。且由上 節可知, ZMP 點上之淨力矩為零,故可利用 D’Alambert 觀點來列出其公式, 其傳統已知公式如下:. ur ur ⎛ v.. ur ⎞ uur uur uur ⎤ ⎡ m r P r g I α ω I ω − × + + + × ⎜ i ⎟ i i ∑i ⎢⎣ i i i i i⎥ ⎝ ⎠ ⎦ uuur uur ur uur + ∑ M j + ∑ Sk − P × Fk = 0. (. j. k. ) (. ). 30. (3-1).
(42) 若將各桿件視為單一質點,且無外力與外力矩作用,則(3-1)式可簡化為. ur ur ⎛ v.. ur ⎞ ⎤ ⎡ m r ∑i ⎢⎣ i i − P × ⎜⎝ ri + g ⎟⎠⎥⎦ = 0. (. ). (3-2). 因為在機器人運動中,支撐腳一定位於地面上,所以 ZMP 值恆為零,其 ur ur ur ur uur P = X zmp e1 + Yzmp e2 ,且 g x = g y = 0,故重力加速度 g = − ge3 。由以上條件,可將(3-2). (. ). 式展開成: ... ur. i. 1. ⎡ ⎤ ∑ m ⎢⎣(Y − Y ) × ⎛⎜⎝ Z − g ⎞⎟⎠ − Z Y ⎥⎦e ... i. i. zmp. i. i. +. i. .. ⎡ ⎤ uur ⎛ .. ⎞ m X X Z g Z X − − × − + ( ) ∑i i ⎢⎣ i zmp ⎜⎝ i ⎟⎠ i i ⎥⎦e2 +. .. .. ⎡ ⎤ ur m X − X Y − Y − Y X ∑i i ⎢⎣( i zmp ) i ( i zmp ) i ⎥⎦e3 = 0. (3- 3). 接著將(3-3)式依X、Y、Z各軸方向依序拆解成下列三式: ⎡ ∑ m ⎢⎣ (Y i. i. i. .. ⎤ ⎛ .. ⎞ − Y zmp ) × ⎜ Z i − g ⎟ − Z i Yi ⎥ = 0 ⎝ ⎠ ⎦. (3- 4). ∑ m ⎢⎣ − ( X. ⎡. i. .. ⎤ ⎛ .. ⎞ − X zmp ) × ⎜ Z i − g ⎟ + Z i X i ⎥ = 0 ⎝ ⎠ ⎦. (3- 5). ∑ m ⎢⎣⎡( X. .. .. ⎤ − X zmp ) Yi − (Yi − Yzmp ) X i ⎥ = 0 ⎦. (3- 6). i. i. i. i. i. 最後將(3-4)式和(3-5)式經過移項整理可得:. X zmp. .. ⎡⎛ .. ⎤ ⎞ m Z g X Z X − − ∑i i ⎢⎣⎜⎝ i ⎟⎠ i i i ⎥⎦ = ⎛ .. m ∑i i ⎜⎝ Zi − g ⎞⎟⎠. ⎡. Yzmp =. ⎤. ∑ m ⎢⎣⎛⎜⎝ Z − g ⎞⎟⎠ Y − Z Y ⎥⎦ i. ... ... i. i. i. .. ∑i mi ⎛⎜⎝ Zi − g ⎞⎟⎠. 31. i. (3- 7). i. (3- 8).
(43) (3-7)式與(3-8)式即為一般機器人在 X-Y 平面穩定運動,所需滿足的 ZMP 公式。其中,Mi 為第 i 個桿件質量; Xi 、Yi、Zi 為第 i 個桿件位置向量,分 ... ... ... 別是 P 向量中各分量的 X、Y、Z 值; X i Yi Z i 為第 i 個桿件加速度向量,其值由 對 Pi 二次微分而得;g 則為重力加速度。在此,二足機器人運動中的速度、加 速度向量等參數是以線性化的方式利用動力學中基本定義來求解,因此將所需參 數算出並代入(3-7)及(3-8)式後,最後即可求得 ZMP 點 X 軸與 Y 軸之位置。 除此之外,若機器人遭受到外力時, (3-7)式及(3-8)式於分子項便皆增加 了外力項 f x、f y ,而可改寫成(3-9)式與(3-10)式。 ⎡. X zmp =. Yzmp. .. ⎤ − Z X i i i i ⎥ + ∑ fx ⎦ .. ∑i mi ⎛⎜⎝ Zi − g ⎞⎟⎠. ∑ m ⎢⎣⎛⎜⎝ Z − g ⎞⎟⎠ X i. i. ... .. ⎡⎛ .. ⎤ ⎞ m Z g Y Z Y − − ⎜ ⎟ ∑i i ⎢⎣⎝ i ⎠ i i i ⎥⎦ + ∑ f y = .. ∑i mi ⎛⎜⎝ Zi − g ⎞⎟⎠. (3- 9). (3- 10). 總結可知,當機器人遭遇到外來的力量,使得機器人重心上造成影響時,若 我們能確實知道此外來力量之量值,便能以此公式算出目前機器人遭受到外力後 所改變之 ZMP 位置,而可進一步設法控制機器人之姿態以保持平衡。但此為理 想狀態,一般而言,機器人所遭受之外來力量為未知的,因此無法把此未知外力 值帶入(3-9)及(3-10)式以算出機器人改變姿態後之 ZMP 位置。故傳統上計 算 ZMP 機器人平衡之方法,大多有無法顧及外力的影響而當面對外力之狀況下 機器人具有無法自我平衡之缺點。以此情況而言,可能並不是一擁有最良好計算 ZMP 點之方式。. 32.
(44) 3.2 『PAPA-Man』 ZMP 點之實現 由上節所述,傳統 ZMP 的計算具有無法考慮未知外力的缺點,除此之外, 最大之缺點為其計算公式將各桿件假設為位於桿件重心之單一質點,且參數中除 了需得知機器人每個板件之質量外,甚至要求知目前機器人正在運動中每個板件 之位置向量、速度向量與加速度向量等;但要獲取這些機器人運動中的即時參 數,不僅作法複雜且運算量龐大,且即便可算出 ZMP 點,也幾乎難以低運算量 即時算出 ZMP 而達成即時平衡之目的;有鑑於許多國內外之文獻,在計算機器 人 ZMP 點時,為了簡化上述 ZMP 參數的複雜取得,常改以模擬之方式,利用 Adams 等機構軟體來模擬取得各個所需之參數與角度,帶入傳統之 ZMP 公式而 得知其目前之 ZMP 狀況,但由於本論文為機器人之實做,故於論文中並不考慮 此種軟體模擬的方式。 在此是以另一種方法- 直接以腳底受力資訊的觀點來算出其 ZMP 點,如圖 3-3 所示。若地面的反作用力集中機器人腳底 P 點,且沿著 P 點之 X 軸與 Y 軸, 不管是內力或重力產生的淨力矩皆為零,即可定義 P 點為零力矩點(ZMP) 。 X. Ty=0 P ZMP. Tx=0. 圖 3-3:機器人腳底平面之受力狀況. 為了計算出上述之 ZMP 點,我們可以規劃機器人腳底的受力狀況[11]來完 成,如下圖 3-4 所示。. 33.
(45) 圖 3-4:ZMP 點之受力規劃圖. 已知通過 ZMP 點之 X 軸與 Y 軸,不管是由內力或重力所產生的淨力矩皆為 零,在此即利用此觀點對其 X 軸與 Y 軸之受力狀況分開分析此規劃圖 X 座標系. (X zmp - X1 ) f1 +(X zmp - X 2 ) f 2 +(X zmp - X3 ) f3 =0. (3- 11). Y 座標系. (Yzmp - Y1 ) f1 +(Yzmp - Y2 ) f 2 +(Yzmp - Y3 ) f 3 =0. (3- 12). 最後將(3-11)式和(3-12)式經過移項整理可得所求之 ZMP 公式. X zmp =. X1f1 +X 2f 2 +X3f3 f1 +f 2 +f3. (3- 13). Yzmp =. Y1f1 +Y2 f 2 +Y3f 3 f1 +f 2 +f 3. (3- 14). 在此重點為如何得知 f1、f2、f3 的壓力值,若可求得目前其分別的壓力值, 則代入(3- 11)、 (3- 12)式後即可計算出雙足機器人即時之 ZMP 點了。 34.
(46) 為了得知 f1、f2、f3 的壓力值,在此以 Phidgets Inc.[28]所生產的壓力感測器 (Force Sensing Resistors, FSR),量測上述規劃好之雙足機器人腳底壓力分佈點 f1、f2、f3。圖 3-5 為 FSR 實體圖與規格大小。. “ 圖 3-5:Force Sensing Resistors 實體圖與其形狀規格. 壓力感測器為多層薄膜的聚合體,其構造如下圖 3-7,功能為當外力施展到 其主動表面的區域時,FSR 會隨著外力的增加而電阻隨之下降。除此之外,雖然 特性與應變規有很多相似之處,但它們仍有所不同,且當壓力感測器使用在人類 觸碰控制的電子元件中,壓力敏感度為最佳化。. 圖 3-6:Force Sensing Resistors 構造分析圖[28] 35.
數據




+7


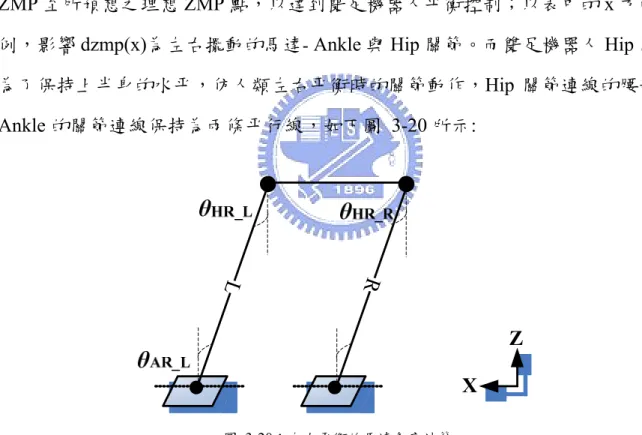


Outline
相關文件
蔣松原,1998,應用 應用 應用 應用模糊理論 模糊理論 模糊理論
情境感知巡檢路線即時導引機制之研製 Development of a Real-time Patrol Routing Mechanism in a Context-Aware Environment
In the proposed method we assign weightings to each piece of context information to calculate the patrolling route using an evaluation function we devise.. In the
在軟體的使用方面,使用 Simulink 來進行。Simulink 是一種分析與模擬動態
The scenarios fuzzy inference system is developed for effectively manage all the low-level sensors information and inductive high-level context scenarios based
本研究主要以 But-for 崩塌竣工時程分析技術為基礎進行理論推導,確認此延遲分析技術 計算邏輯之問題與完整性,之後提出修正之計算邏輯,使
最後特別提出說明,本研究用戶端作業系統為 Win 2000 Professional,伺服 器端作業系統為 Windows 2000 Server 並啟動 Active Directory
圖4 1 整合資訊系統風險 圖4.1 整合資訊系統風險..
之意,此指依照命令動作的意義。所謂伺服 系統,就是依照指示命令動作所構成的控制
