物件導向分類法於DMC航照影像萃取崩塌地之研究 - 政大學術集成
137
0
0
全文
(2) 立. 政 治 大. ‧. ‧ 國. 學. n. er. io. sit. y. Nat. al. Ch. engchi. i n U. v.
(3) 謝致 感謝主!在六年前的九月,將小弟帶到政大這所美麗的校園,同時也 遇到不少貴人的幫助,使小弟可以如期完成學士和碩士學位。在此向各位 貴人獻上感謝: (1) 家人:謝謝您們的扶持與照顧,雖然在研究所期間很少回家看 看您們,但您們卻時常打電話關心並為我禱告,謝謝您們,我 愛您們!也謝謝妳一路的照顧,陪伴著我經過研究的高山與低 谷,謝謝妳!. 政 治 大 但每一次各位老師都很有耐心,逐一回答並解決小弟的疑惑, 立. (2) 師長:謝謝系上各位老師的教導,儘管小弟笨拙,時常問問題,. ‧ 國. 學. 謝謝您們!也謝謝詹進發老師,感謝您給小弟有許多學習的機. 會,並且也感謝老師您常常跟我分享人生的經歷,使小弟在大. ‧. 學和研究所時期,不僅學習如何作事,也學習如何作人。. sit. y. Nat. (3) 同學:謝謝各位研究室的戰袍們,有您們一同作戰,使小弟雖. al. er. io. 於水深火熱的研究時,但卻不孤單。也感謝學長姊時常準備豐. v. n. 富的點心,使小弟可以隨時保持充足體力應付繁忙的課業。. Ch. engchi. i n U. (4) 教會弟兄姊妹:謝謝您們常常在愛中為我代導並關心,並時常 邀請到家中愛宴。感謝您們這六年來的扶持與照顧,很得您們 的供應並加強,願主祝福您們! 最後,幫助小弟如期完成學業的人太多了,若上面沒有寫到,先說聲 抱歉,但還是要再次跟所有幫助過小弟的人,說聲:「謝謝您們!願主祝 福您們!」.
(4) 立. 政 治 大. ‧. ‧ 國. 學. n. er. io. sit. y. Nat. al. Ch. engchi. i n U. v.
(5) 摘要 台灣位於環太平洋地震帶上,地形為山地居多,且地質脆弱,加上位 於西太平洋副熱帶地區,使得山區常受到颱風的侵擾而發生崩塌,導致土 石流和洪水等災害發生,進而影響人民的生命和財產安全。因此,如何有 效地建置崩塌地區域資料庫,成為國土保育與災害防治的重要課題。以往 利用遙測與航測技術於崩塌地萃取的研究中,大多是於幾何糾正後衛星影 像或是航測正射影像上分析崩塌地,但產製正射影像或是糾正衛星影像時, 都需要花費較多的時間,對於講求時效性的救災行動而言頗為不利。本研. 政 治 大 像分類法,於 DMC(Digital 立 Mapping Camera)航測原始影像上直接萃取崩. 究之目的為發展一套不需使用正射影像萃取崩塌地的方法,以物件導向影. ‧ 國. 學. 塌地資訊。首先採取多重解析影像分割的技術,將航測影像依像元光譜和 形狀同質性分割成不同區塊(物件),接著利用影像光譜統計值搭配區域. ‧. 成長法,偵測影像中的雲覆蓋地區並過濾。其次,根據光譜亮度統計特徵. sit. y. Nat. 值,將影像區分成陰暗地區、正常地區以及較亮地區之三種土地覆蓋類型,. al. er. io. 使用線性相關糾正法(Linear-correlation Correction)將陰暗地區光譜亮度. v. n. 值轉換至正常地區,並利用物件的特徵值,如光譜、面積、形狀以及相關. Ch. engchi. i n U. 性依序萃取此三種土地覆蓋類型內的崩塌地。最後,使用光線追蹤法 (Ray-tracing),將崩塌地區塊從影像坐標轉換至地圖坐標,使其可以套疊 地形資料如坡度、坡向,並進行空間分析以提升崩塌地的判釋精度。研究 結果顯示,崩塌地萃取之使用者精度和生產者精度,均有 82%以上,並且 整個實驗可大量批次處理影像,及快速建立崩塌地資料庫,本研究之方法 和崩塌地資料庫將有助於國土保育與崩塌地的災害防治。. 關鍵詞:DMC 航照影像、物件導向影像分類法、多重解析影像分割法、線 性糾正法、光線追蹤法。.
(6) 立. 政 治 大. ‧. ‧ 國. 學. n. er. io. sit. y. Nat. al. Ch. engchi. i n U. v.
(7) Abstract Being located in a subtropical and seismic zone of the West Pacific, the geology is fragile and topography is mountainous in Taiwan. Landslides, floods and other disasters induced by typhoons occur frequently, and it cause the life-threatening and property loss of human beings in Taiwan. Therefore, how to establish landslides data effectively become an important issue of land conservation and disasters management. In recently years, most of the researchers used aerial ortho-images or. 政 治 大 of time generating aerial 立 ortho-images and rectifying satellite images, and it also. satellite georeferencing images to detect landslides sites. However, it spent a lot. ‧ 國. 學. reduced the efficiency of landslides analysis. Thus, this study developed an object-oriented classification method, which can be directly applied in raw. ‧. image data, to detect landslides sites. Firstly, this study used multi-resolution. sit. y. Nat. image segmentation technique to segment images acquired by Z/I DMC(Digital. n. al. er. io. Mapping Camera) into individual regions (objects) according to the. i n U. v. homogeneity of spectral and shape features, and then removed cloud areas by. Ch. engchi. using brightness features depended on the spectral information of images. Secondly, the study divided the entire image into three areas, which are darker area, normal area and lighter area, according to brightness value. Next, Linear-correlation correction (LCC) method was used in this study to transform darker area to normal area so that it can easily detect the landslides sites in darker area, and the object features, such as spectral, area, shape and space correlation indices, were used to extract landslide sites in images. Finally, in order to enhance the accuracy of landslide, the initial landslides were converted from image coordinate system to map coordinate system by.
(8) ray-tracing method, so the initial landslides data can be further extracted by using topographic data, including slope and aspect data. The results of this study showed that the user and producer accuracies of detecting landslides can reach up to 82%. Moreover, the entire experiments process of this study can batch analyze automatically and establish landslides database quickly. It is expected that the method and landslides data of this study may have contribution to land conservation and disasters management.. 政 治 大 Multi-resolution image segmentation, Linear-correlation correction, Ray-tracing 立 Keywords: DMC aerial images, Object-oriented image classification,. method.. ‧. ‧ 國. 學. n. er. io. sit. y. Nat. al. Ch. engchi. i n U. v.
(9) 目錄 第一章 緒論 ........................................................................................................ 1 第一節 前言 .................................................................................................... 1 第二節 研究動機與目的......................................................................................................... 4. 第二章 文獻回顧 ................................................................................................ 7 第一節 崩塌地的定義及類型............................................................................................ 7 第二節 原始影像前處理相關研究.................................................................................. 10 一、雲層偵測之相關研究 ...................................................................................... 10 二、陰影地區偵測及填補之相關研究 .................................................................. 13 第三節 影像偵測崩塌地之相關研究 .............................................................................. 15. 政 治 大. 一、影像分割法 ...................................................................................................... 15 二、影像分類法 ...................................................................................................... 19. 立. 三、相關研究整理 .................................................................................................. 25. ‧ 國. 學. 第三章 研究材料與方法 .................................................................................. 29 第一節 研究區域與材料 ................................................................................................. 29. ‧. 一、研究區域 .......................................................................................................... 29 二、研究材料 .......................................................................................................... 30. y. Nat. (一) DMC 航照原始影像 ........................................................................ 30. sit. (二) 數值高程模型(DEM, Digital Elevation Model) ......................... 37. al. er. io. (三) 坡度(Slope)和坡向(Aspect) .................................................. 38. n. 第二節 研究方法與流程 ................................................................................................. 41. Ch. i n U. v. 一、多重解析度分割技術的理論與精度評估指標。 .......................................... 43. engchi. 二、原始影像前處理和初步崩塌地萃取。 .......................................................... 47 (一) 雲層地區偵測 .................................................................................. 49 (二) 影像分區處理 .................................................................................. 50 (三) 初步崩塌地偵測 .............................................................................. 51 三、坐標轉換至地圖坐標,並套疊地形資料進一步萃取崩塌地。 .................. 54 (一) 光線追蹤法 ...................................................................................... 55 (二) 套疊地形資料所採用的指標........................................................... 57. 第四章 研究成果與分析 .................................................................................. 61 第一節 原始影像初步分析 ............................................................................................. 61 第二節 影像分割成果與評估.......................................................................................... 64 第三節 雲覆蓋地區的偵測與評估.................................................................................. 72 第四節 崩塌地的萃取與評估.......................................................................................... 83 一、影像分區成果 .................................................................................................. 83 I.
(10) 二、各分區崩塌地萃取成果 .................................................................................. 87 三、光線追蹤法坐標轉換精度評估 ...................................................................... 93 四、套疊地形資料輔助判釋之崩塌地成果 .......................................................... 98 五、精度評估成果 ................................................................................................ 103. 第五章 結論與建議 ....................................................................................... 111 第一節 結論.................................................................................................................... 111 第二節 建議.................................................................................................................... 114. 參考文獻 ......................................................................................................... 115. 立. 政 治 大. ‧. ‧ 國. 學. n. er. io. sit. y. Nat. al. Ch. engchi. II. i n U. v.
(11) 圖目錄 圖 2-1. 多時段雲層偵測示意圖(徐逸祥,2006) ...................................... 10. 圖 2-2. 雲層和其他區域空間特徵圖(徐逸祥,2006) .............................. 11. 圖 2-3. 直方圖門檻值偵測法 .......................................................................... 13. 圖 2-4. 區域分割門檻值示意圖 ...................................................................... 15. 圖 2-5. 群集分析示意圖(Tan et al., 2006) ................................................. 16. 圖 2-6 Sobel 濾波(x 梯度方向)................................................................. 17 圖 2-7 Sobel 濾波(y 梯度方向)................................................................. 17 圖 2-8. Roberts 濾波(x 梯度方向) ............................................................. 17. 圖 2-9. Roberts 濾波(y 梯度方向) ............................................................. 17. 圖 2-10. 區域成長法(1) .............................................................................. 17. 圖 2-11. 區域成長法(2) .............................................................................. 17. 圖 2-12. 區域成長法(3) .............................................................................. 18. ‧ 國. 區域成長法(4) .............................................................................. 18. ‧. 圖 2-14. 學. 圖 2-13. 立. 政 治 大. 監督式分類流程圖 ............................................................................ 19 非監督式分類流程圖 ........................................................................ 20. 圖 2-16. 椒鹽效應示意圖 ................................................................................ 22. 圖 2-17. 雜訊處理前影像 ................................................................................ 23. 圖 2-18. 雜訊處理後影像 ................................................................................ 23. 圖 2-19. 物件導向分類示意圖 ........................................................................ 23. 圖 2-20. 物件判釋(1) .................................................................................. 24. 圖 2-21. 物件判釋(2) .................................................................................. 24. 圖 3-1. 研究區域圖(1) ................................................................................ 29. 圖 3-2. 研究區域圖(2) ................................................................................ 30. n. al. er. io. sit. y. Nat. 圖 2-15. Ch. engchi. i n U. v. 圖 3-3 DMC 相機圖........................................................................................ 31 圖 3-4 DMC 相機鏡頭圖................................................................................ 31 圖 3-5 DMC 原始影像圖(左)和影像增強圖(右)................................... 31 圖 3-6 影像 1 原始圖(左)和影像增強圖(右) ........................................ 32 圖 3-7 影像 2 原始圖(左)和影像增強圖(右) ........................................ 33 III.
(12) 圖 3-8 影像 3 原始圖(左)和影像增強圖(右) ....................................... 33 圖 3-9 影像 4 原始圖(左)和影像增強圖(右) ....................................... 34 圖 3-10 影像 5 原始圖(左)和影像增強圖(右) ..................................... 34 圖 3-11 各影像於研究區域分佈圖 ................................................................. 35 圖 3-12 研究區域高程分布圖 ......................................................................... 37 圖 3-13 坡度示意圖 ......................................................................................... 38 圖 3-14 地物之坡度與坡向關係(Chang, 2010) .............................................. 38 圖 3-15 研究地區坡度示意圖 ......................................................................... 39 圖 3-16 研究地區坡向示意圖 ......................................................................... 40 圖 3-17 研究流程圖 ......................................................................................... 42 圖 3-18. 政 治 大. 多重解析分割演算法階層概念圖 ................................................... 46. 立. 圖 3-19 研究流程圖-初步崩塌地分類流程 ................................................. 48 常態分配(無偏態) ....................................................................... 50. 圖 3-21. 非常態分配(右偏) ....................................................................... 50. ‧. ‧ 國. 學. 圖 3-20. 圖 3-22 盒鬚圖示意圖 ..................................................................................... 51 影像物件之主要方向圖(eCognition 8.8 reference book) .......... 53. 圖 3-24. 鄰近關係說明圖(eCognition 8.8 reference book)....................... 53. 圖 3-25. 研究流程圖-進一步套疊地理資料分析 ....................................... 54. 圖 3-26. 光線追蹤法示意圖(修改自湯美華,2006) ............................... 56. 圖 3-27. 崩塌角度示意圖 ............................................................................... 57. 圖 4-1. 原始影像圖 ......................................................................................... 61. 圖 4-2. 原始影像灰度直方圖(Blue) .......................................................... 61. n. al. er. io. sit. y. Nat. 圖 3-23. Ch. engchi. i n U. v. 圖 4-3 原始影像灰度直方圖(Green) ......................................................... 62 圖 4-4. 原始影像灰度直方圖(Red) ........................................................... 62. 圖 4-5. 影像增強調整(1) ........................................................................... 62. 圖 4-6. 影像增強調整(2) ........................................................................... 63. 圖 4-7 影像分割實驗流程 ............................................................................... 64 圖 4-8 scale 值分割成果(左:scale:200;中:scale:500;右:scale:800) ........................................................................................................................... 65 IV.
(13) 圖 4-9 分割成果比較(scale:200) .............................................................. 66 圖 4-10 分割成果比較(scale:500) ............................................................ 66 圖 4-11 分割成果比較(scale:800) ............................................................ 67 圖 4-12 分割示意圖(shape:0.9) ................................................................ 69 圖 4-13 分割示意圖(shape:0.1;compact:0.1) ..................................... 69 圖 4-14 分割示意圖(shape:0.1;compact:0.5) ...................................... 70 圖 4-15 分割示意圖(shape:0.1;compact:0.9) ..................................... 70 圖 4-16 雲層萃取流程圖 .................................................................................. 72 圖 4-17 初步雲層亮度值準則圖 ...................................................................... 73 圖 4-18 過濾較小面積雲層區域圖 .................................................................. 73. 政 治 大. 圖 4-19 錯誤雲層地區示意圖(1) ................................................................ 74. 立. 圖 4-20 錯誤雲層地區示意圖(2) ................................................................ 74. ‧ 國. 學. 圖 4-21 區域成長示意圖(eCognition 8.8 reference book) ......................... 75 圖 4-22 區域成長準則圖 .................................................................................. 76. ‧. 圖 4-23 初步萃取雲層圖(1) ........................................................................ 77. sit. y. Nat. 圖 4-24 區域成長雲層圖(1) ........................................................................ 77. io. er. 圖 4-25 初步萃取雲層圖(2) ......................................................................... 77 圖 4-26 區域成長雲層圖(2) ......................................................................... 77. n. al. Ch. i n U. v. 圖 4-27 初步萃取雲層圖(3) ......................................................................... 77. engchi. 圖 4-28 區域成長雲層圖(3) ......................................................................... 77 圖 4-29 初步萃取雲層圖(4) ........................................................................ 78 圖 4-30 區域成長雲層圖(4) ......................................................................... 78 圖 4-31 初步萃取雲層圖(5) ........................................................................ 78 圖 4-32 區域成長雲層圖(5) ......................................................................... 78 圖 4-33 影像雲層萃取精度成果圖 .................................................................. 82 圖 4-34 影像分區流程圖 .................................................................................. 83 圖 4-35 原始影像圖(1) ................................................................................ 84 圖 4-36 影像分區圖(1) ................................................................................ 84 圖 4-37 原始影像圖(2) ................................................................................ 84 V.
(14) 圖 4-38 影像分區圖(2) ................................................................................ 84 圖 4-39 原始影像圖(3) ............................................................................... 85 圖 4-40 影像分區圖(3) ............................................................................... 85 圖 4-41 原始影像圖(4) ............................................................................... 85 圖 4-42 影像分區圖(4) ................................................................................ 85 圖 4-43 原始影像圖(5) ............................................................................... 86 圖 4-44 影像分區圖(5) ................................................................................ 86 圖 4-45 陰暗地區萃取流程圖 ......................................................................... 87 圖 4-46 陰暗地區(左)以及崩塌地萃取成果(右)圖(1) ................... 88 圖 4-47 陰暗地區(左)以及崩塌地萃取成果(右)圖(2) ................... 88. 政 治 大. 圖 4-48 陰暗地區(左)以及崩塌地萃取成果(右)圖(3) ................... 88. 立. 圖 4-49 正常以及較亮地區流程圖 ................................................................. 89. ‧ 國. 學. 圖 4-50 正常地區(左)以及崩塌地萃取成果(右)圖(1) ................... 90 圖 4-51 正常地區(左)以及崩塌地萃取成果(右)圖(2) ................... 90. ‧. 圖 4-52 正常地區(左)以及崩塌地萃取成果(右)圖(3) ................... 90. sit. y. Nat. 圖 4-53 較亮地區(左)以及崩塌地萃取成果(右)圖(1) ................... 91. io. er. 圖 4-54 較亮地區(左)以及崩塌地萃取成果(右)圖(2) ................... 91 圖 4-55 較亮地區(左)以及崩塌地萃取成果(右)圖(3) ................... 91. n. al. Ch. i n U. v. 圖 4-56 崩塌地過濾前(上)過濾後(下)示意圖 ..................................... 92. engchi. 圖 4-57 崩塌地過濾前(左)過濾後(右)示意圖 ...................................... 92 圖 4-58 原始影像上數化欲檢核向量檔示意圖 ............................................. 93 圖 4-59 光線追蹤法轉換向量圖套疊於正射影像 ......................................... 93 圖 4-60 光線追蹤法檢核點分佈(影像 1、影像 2、影像 3) .................... 94 圖 4-61 光線追蹤法檢核點分佈(影像 4、影像 5) ................................... 94 圖 4-62 光線追蹤法誤差向量圖 ..................................................................... 95 圖 4-63 影像 1 轉換檢核圖 .............................................................................. 96 圖 4-64 影像 2 轉換檢核圖 .............................................................................. 96 圖 4-65 影像 3 轉換檢核圖 ............................................................................. 97 圖 4-66 影像 4 轉換檢核圖 ............................................................................. 97 VI.
(15) 圖 4-67 影像 5 轉換檢核圖 ............................................................................... 97 圖 4-68 套疊地理資料萃取崩塌地流程圖 ...................................................... 98 圖 4-69 平坦地區萃誤崩塌地示意圖 .............................................................. 99 圖 4-70 園內道示意圖(水土保持手冊,2005) ........................................ 100 圖 4-71 初始崩塌地套疊於坡度資料 ............................................................ 101 圖 4-72 河道邊緣土石淤積示意圖 ................................................................ 102 圖 4-73 河道邊緣區域萃取成果 .................................................................... 103 圖 4-74 影像 1 於此三種崩塌地精度圖 ........................................................ 105 圖 4-75 影像 2 於此三種崩塌地精度圖 ........................................................ 105 圖 4-76 影像 3 於此三種崩塌地精度圖 ........................................................ 106. 政 治 大. 圖 4-77 影像 4 於此三種崩塌地精度圖 ........................................................ 106. 立. 圖 4-78 影像 5 於此三種崩塌地精度圖 ........................................................ 107. ‧. ‧ 國. 學. 圖 4-79 影像崩塌地萃取精度成果圖 ............................................................. 110. n. er. io. sit. y. Nat. al. Ch. engchi. VII. i n U. v.
(16) 表目錄 表 1-1、各種崩塌地資料調查方式比較 ........................................................... 2 表 2-1、崩塌地定義以及類型 ........................................................................... 8 表 2-2、崩塌地判釋依據(潘國樑,2009) ................................................... 9 表 2-3、崩塌地判釋準則 ................................................................................... 9 表 2-4、雲層偵測方法 ..................................................................................... 11 表 2-5、雲層偵測方法(續) ......................................................................... 12 表 2-6、近十年來國內崩塌地之研究 ............................................................. 25 表 2-7、近十年來國內崩塌地之研究(續) ................................................. 26 表 3-1、原始影像光譜資訊表 ......................................................................... 36. 政 治 大. 表 3-2、原始影像光譜資訊表(續) ............................................................. 36. 立. 表 3-3、誤差矩陣表示方法 ............................................................................. 58. ‧ 國. 學. 表 4-1、不同 scale 值之分割成果評估 ........................................................... 68 表 4-2、分割成果評估(scale 值皆為 500;shape 值皆為 0.1) ................. 71. ‧. 表 4-3、成長條件以及跌代次數說明表 ......................................................... 76. sit. y. Nat. 表 4-4、影像 1 雲層評估誤差矩陣 ................................................................. 79. io. er. 表 4-5、影像 2 雲層評估誤差矩陣 ................................................................. 79 表 4-6、影像 3 雲層評估誤差矩陣 ................................................................. 80. n. al. Ch. i n U. v. 表 4-7、影像 4 雲層評估誤差矩陣 ................................................................. 80. engchi. 表 4-8、影像 5 雲層評估誤差矩陣 ................................................................. 81 表 4-9、各個原始影像光譜資訊 ..................................................................... 83 表 4-10、各張影像光線追蹤法之轉換精度成果表 ....................................... 98 表 4-11、農路系統設計相關資訊表(水土保持手冊,2005) ................. 100 表 4-12、沒過濾平坦地區和河道兩旁淤積之各影像崩塌地精度 ............. 104 表 4-13、過濾平坦地區,但沒過濾河道兩旁淤積之各影像崩塌地精度 . 104 表 4-14、過濾平坦地區和河道兩旁淤積之各崩塌地精度 ......................... 104 表 4-15、影像 1 崩塌地評估誤差矩陣 ......................................................... 107 表 4-16、影像 2 崩塌地評估誤差矩陣 ......................................................... 108 表 4-17、影像 3 崩塌地評估誤差矩陣 ......................................................... 108 VIII.
(17) 表 4-18、影像 4 崩塌地評估誤差矩陣 .......................................................... 109 表 4-19、影像 5 崩塌地評估誤差矩陣 .......................................................... 109. 立. 政 治 大. ‧. ‧ 國. 學. n. er. io. sit. y. Nat. al. Ch. engchi. IX. i n U. v.
(18) 立. 政 治 大. ‧. ‧ 國. 學. n. er. io. sit. y. Nat. al. Ch. engchi. i n U. v.
(19) 第一章 緒論 第一節 前言 台灣本島位屬於環太平洋地震帶上,受到歐亞板塊和菲律賓海板塊擠 壓的影響,不僅地震活動頻繁,其造山運動也較強烈,造成台灣本島的地 形分佈是以山地地形為主,包含了高山地區和周圍的丘陵地區,約占全台 面積的 70%左右。除此之外,台灣所屬的地理位置於西太平洋北緯 21 到 26 度之間,屬於副熱帶地區,於 5 月份至 10 月份之間易受到熱帶地區颱風. 政 治 大. 的經過,使得台灣本島雨量豐富但不均。因此,地形因素加上所在地理位. 立. 置,造成台灣的河川短而急,水流侵蝕作用強烈,加上地震活動頻繁導致. ‧ 國. 學. 地質脆弱和斷層的產生,都構成崩塌地(Landslide)產生的因素(水土保 持手冊,2005)。近年來台灣受到颱風影響導致的災害相當嚴重,如 1996. ‧. 年的賀伯颱風,於台灣中部如南投縣水里鄉、信義鄉和鹿谷鄉等地區造成. y. Nat. sit. 嚴重的山洪爆發、坡地崩塌等災害;2001 年的納莉颱風,重創北台灣,造. n. al. er. io. 成台灣山區多處土石流災害;2009 年的莫拉克颱風,於台灣中南部、東部. i n U. v. 多處地區降下刷新紀錄的雨量,進而引發嚴重水患,造成台南、高雄、屏. Ch. engchi. 東及台東等地區重大災情,多數為土石流災害,使台灣農業損失超過 195 億元(中央氣象局網站,2012)。 因此,從上述可知,颱風在台灣本島所產生的災情絕大部分來自於崩 塌地區和土石流災害。因此,如何有效地以及監測崩塌地資料,成為當前 災害防治上重要的課題。目前崩塌地資料的調查,主要分成三種方式(洪 凱政,2009;黃宏斌,2010):(1) 現況調查。此種方式為差派專業人 士直接到現場測量以及記錄崩塌地的資訊,目的為瞭解自然環境的特性。 調查的項目包括地形、地質、植生以及排水系統等資訊。(2) 機制調查。 此種方式與現況調查相同,需要蒐集並調查足以產生崩塌地的原因。但此 1.
(20) 種方式考量到工程經濟性以及處理急迫性,會考量這些因素是由於崩塌地 多數位於偏僻陡峻的山區,使其交通不便,因此需要上述的機制因子加入。 (3) 遙感探測(簡稱遙測)技術。此種技術為在崩塌地的區域範圍內, 利用影像處理的技術包括影像增強或影像分類等技術於空載的航照影像或 衛載的衛星影像上偵測出崩塌地的區域。表 1-1 為此三種崩塌地資料蒐集 方式的優缺點。 表 1-1、各種崩塌地資料調查方式比較 現況調查. 蒐集方式. 人為。. 立. 人為。 政 治 大. 戶外。. 戶外。. 室內。. 除了獲得較準確的 獲得較準確的崩塌 崩塌地區域外,也 地 發 生 的 環 境 資 考量到經濟性以及 訊。以獲得較準確 急迫性,以有效的 的崩塌地區域。 決定並蒐集崩塌地 的資料。. n. er. io. 缺點. al. 相較於現地調 查,不需要到現 場蒐集資訊,並 且所花費的人力 以及時間較少。 也可自動化蒐集 資料。. y. ‧ 國. 地形、地質、植生, 另外考量了工程經 影像(航照影像 地形、地質、植生。 濟性以及處理急迫 或衛星影像)。 性因子. Nat. 優點. 影像處理技術, 自動或半自動偵 測崩塌地區域。. ‧. 環境. 遙感探測技術. 學. 蒐集項目. 機制調查. sit. 比較項目. Ch. 需花費較多的人力 以及時間,並且通 常發生崩塌地的區 域地勢環境惡劣, 不易直接現地調 查。. engchi. i n U. 需花費較多的人力 以及時間,並且通 常發生崩塌地的區 域地勢環境惡劣, 不易直接現地調 查。. v. 由於從影像中無 法有效地觀察到 崩塌地的地質物 理性質。因此所 偵測出來的崩塌 地區域精度較現 地調查來的低。. 雖然現地調查(現況調查或機制調查)可得到較準確的崩塌地區域, 但通常崩塌地所涵蓋的面積較大,若僅靠人力需要花費較長的時間。除此 之外,甚至有些崩塌地區域是若在地形險峻的區域,如地震區域或颱風過 2.
(21) 境的區域,其環境也不利於外業的資料調查。因此,遙測技術應用於蒐集 崩塌地資料上就顯得相當重要。主要是於將崩塌地範圍區域以自動(影像 分類的技術)或半自動(影像數化)的方式偵測出來,利用此種方式可以 有效地獲取災害範圍內初步的崩塌地資料,節省大量的人力及時間,目前 行政院農委會林務局以及水土保持局為利用此種方式蒐集崩塌地資料。 因此,本研究考量災害發生時的緊急性以及時效性,採取遙測技術的 方式,分析崩塌地於航照影像上的特徵以及所在位置的相關性加以探討和 研究,以自動萃取出航照影像上崩塌地的資料。. 立. 政 治 大. ‧. ‧ 國. 學. n. er. io. sit. y. Nat. al. Ch. engchi. 3. i n U. v.
(22) 第二節 研究動機與目的 國內近十年的關於遙測影像上崩塌地偵測技術之相關研究中,以採取 像元式(Pixel-based Classification)方式居多(鄭智仁,2010)。但使用像 元式分類方式於崩塌地偵測的成果有限,原因為崩塌地所涵蓋的成分複雜, 並且與周遭的地表資訊關係無法利用僅用單一的像元分類技術區別,儘管 利用較佳的分群演算法也無法得到較佳的分類結果(劉守恆,2002)。此 外,由於技術的不斷提升,感測器上的感測元件以達到公分等級,如 WorldView-2 上全色態的波段其空間解析度已經可以達到 0.46 x 0.46 m。應. 政 治 大. 用如此高的空間解析度影像於像元式的影像分類技術時,易產生椒鹽效應. 立. (Salt and Pepper Effect)的問題,使其降低分類精度(王文宜,2011)。. ‧ 國. 學. 並且地物大多非由單一像元組成,若使用像元式的分類方式,其地物分類 的精度也有限(鄭雅文,2008)。. ‧. 為 了 改 善 像 元 式 分 類 所 遇 到 的 問 題 , 物 件 導 向 ( Object-oriented. y. Nat. sit. Classification)的分類方法被引進。物件導向的概念為將影像中各地物依據. n. al. er. io. 其光譜以及形狀資訊將影像分割成許多區塊,各個區塊(Region)又稱之. i n U. v. 為物件(Object)。接著依據各個區塊的形狀、光譜、紋理等資訊和區塊之. Ch. engchi. 間彼此的鄰近相關性將地物資訊分類出來(Jensen, 2005) 。張雅華等人(2004) 利用物件導向分類法於 IKONOS 衛星影像上分類出基隆河於兩年內前後的 土地利用變遷,其結果顯示物件導向的分類法可以有效地萃取出基隆河沿 岸的土地類別;鄭雅文等人(2008)利用物件導向分類法與其像元式分類 法應用於影像上土地覆蓋的分類,其結果顯示利用物件導向分類法所得的 土地覆蓋分類精度高於像元式分類法;雷祖強等人(2009)利用物件導向 分類法應用於 ADS-40 影像中水稻田坵塊的萃取,並與像元式的分類方法 比較,其結果顯示利用物件導向所萃取來的水稻田坵塊精度高於像元式的 分類法。 4.
(23) 物件導向的分類方法首要的步驟為影像分割(Image Segmentation), 接著將每個分割出來的區塊當作影像分類的最小單元,表示影像分割的成 果會直接影響物件導向影像分類的結果。因此,影像分割的技術為物件導 向分類法中重要的議題(Xiao, 2010)。目前國內關於利用物件導向分類法 的研究中,絕大部分的研究使用的影像分割技術為多重解析分割法 (Multiresolution Segmentation),但文章中較缺乏對此分割技術所使用的 參數探討與研究(洪凱政,2009;鄭智仁,2010;黃韋凱,2010;傅建嘉, 2011)。因此本研究探討影響多重解析分割法的參數(光譜以及形狀)對. 政 治 大 近年來國內有許多採取物件導向分類法於崩塌地萃取的研究 (陳俊良, 立. 影像分割成果的影響,以提升後續影像分類的精度。. 2008;洪凱政,2009;黃韋凱,2010;鄭智仁,2010;王主一,2012;詹. ‧ 國. 學. 鈞評,2012)。由於崩塌地在光譜反射值上接近河道土石淤積,加上崩塌. ‧. 地光譜反射值較亮,不易與雲層地區和部分人工建物材質區分。因此,若. y. Nat. 要在影像上自動萃取崩塌地具有一定的難度 (洪凱政,2009;黃韋凱,2010) 。. er. io. sit. 為了提高崩塌地分類精度,陳俊良(2008)採取分析崩塌地的紋理粗糙度, 以彌補光譜指標在崩塌地分類上的不足;洪凱政(2009)和黃韋凱(2010). al. n. v i n 利用增加分類地物種類,以區別崩塌地和其他地物;鄭智仁(2010)、王 Ch engchi U. 主一(2012)和詹鈞評(2012)採取數值表面模型(Digital Surface Model) 提升崩塌地的萃取精度。因此,若要增加崩塌地的分類精度,如何建立影 像的雲覆蓋分類準則和採取其他輔助資料(如坡度和坡向資料等)為相當 重要的課題。 此外,上述偵測崩塌地的所使用的影像來源都是採取有地圖坐標的影 像(正射影像、幾何糾正過的衛星影像),雖然於地圖坐標影像上可以加 入地形資料輔助判釋崩塌地區域,但也增加崩塌地判釋的處理流程。如正 射影像的製作需要經過影像匹配,產製數值地形模型後,接著才產生正射 5.
(24) 影像;衛星影像若要有地圖坐標也需經過幾何糾正處理。因此,若能克服 原始影像沒有坐標的問題,並在其上萃取崩塌地和套疊輔助資料分析,則 可以減少崩塌地萃取的時間,同時也增加災後緊急措施的作業效率。 因此,本研究使用物件導向方法應用於 DMC (Digital Mapping Camera) 航照原始影像偵測崩塌地區域,其目的主要有三項如下: 一、探討與分析多重解析分割法之參數對影像分割的影響。 二、建立雲層、陰影和崩塌地區的準則。 三、建立原始影像坐標至地圖坐標的轉換模式,並利用地形資料輔助 崩塌地判釋。. 立. 政 治 大. ‧. ‧ 國. 學. n. er. io. sit. y. Nat. al. Ch. engchi. 6. i n U. v.
(25) 第二章 文獻回顧 本研究是利用物件導向分類法於航照原始影像上萃取出崩塌地資料。 因此,在文獻回顧的部分,首先介紹崩塌地的定義以及類型,說明在本研 中所要萃取的部分。接著,由於本研究所萃取的崩塌地資料來源為原始影 像,因此在偵測崩塌地之前,須對原始影像前處理,如雲覆蓋、陰影地區 的偵測和過濾。最後為影像偵測崩塌地的相關研究,此部分包含了影像分 割法技術、影像分類法技術和相關崩塌地偵測之研究整理與比較。. 政 治 大. 第一節 崩塌地的定義及類型. 立. 崩塌地的定義,根據農委員會水土保持局手冊(簡稱水土保持手冊),. ‧ 國. 學. 為指邊坡地區受到地球重力作用的影響,導致向下滑動或崩落之塊體運動 現象的區域,稱之為崩塌地。根據國外學者 Varnes(1958)的定義,與農. ‧. 委會水土保持局相似,指重力作用影響邊坡的物質發生向下以及向外的運. y. Nat. sit. 動;國內學者李三畏(1986)提出崩塌地的發生是由於豪雨、降雪和地震. n. al. er. io. 等天然因素或人為的開發與破壞,使其山坡地或丘陵地失去本身的平衡,. i n U. v. 而以本身地物的重量向外或向下移動的現象;劉朝俊(1986)則認為崩塌. Ch. engchi. 地的組成型態為由組成物質加上運動方式來定義;張石角(1987)對崩塌 地定義為構成地表的物質(土壤、岩石或兩者)於重力作用的情況下,向 下坡運動的現象。 崩塌地的類型根據其地物運動方式和移動速度不同而有許多分類,但 是目前尚沒有統一分類的標準。水土保持手冊對崩塌地的分類有山崩、落 石、崩塌、地滑等四類。其主要的分類方式為根據其土體的運動特徵和規 模大小兩項。以規模的大小和運動特徵來分,地滑為指規模較大的土體或 岩體運動,並在坡度較緩的坡面上移動,其運動的特徵為移動速度較慢, 通常移動土體的上方之構造物上可保留原狀;山崩、落石和崩塌為指規模 7.
(26) 較小的土體或岩體運動,但不排除大規模的情況發生,並且發生在坡度較 陡的坡面上,屬於瞬間發生運動速度較快,其發生的原因為土體或岩體崩 解所產生,因此當發生時其土體上的構造物可能完全被破壞。 張石角(1993)於崩塌地的分類主要是根據三種地物的運動方式(快 速斜坡運動、慢速的遣移、蝕溝沖蝕),將崩塌地分成五類:山崩、地滑、 潛移、土石流以及沖蝕。陳信雄(1995)為根據地物的運動型態以及機制 將崩塌地分成兩類,一類是地物遭受破碎,失去平衡而產上快速的移動, 稱之為山崩,一類是考量地層的構成有滑動層的存在,稱之為地滑。李三. 政 治 大 表 2-1、崩塌地定義以及類型 立. 畏(1985)將崩塌地分類為崩落、滑落、流動以及地滑等四項。. 崩塌地定義. 學. ‧ 國. 相關單位或學者. 根據土體的運動特徵和規模大小,分為山崩、落. 水土保持局(農委會). io. y er. 運動,所發生的區域。. sit. Nat. 重力作用影響邊坡的物質發生向下以及向外的. Varnes(1985). a豪雨、降雪和地震等天然因素或人為的開發與破 iv l C n 壞,使其山坡地或丘陵地失去本身的平衡,崩 hengchi U. n 李三畏(1986). ‧. 石、崩塌、地滑等四類。. 落、滑落、流動以及地滑。. 劉朝俊(1986). 組成物質加上運動方式來定義崩塌地。 根據地物的運動方式,將崩塌地分成五類:山. 張石角(1987) 崩、地滑、潛移、土石流以及沖蝕。 根據地物的運動型態以及機制將崩塌地分成山 陳信雄(1995) 崩以及地滑。 因此,由表 2-1 可知,許多學者對於崩塌地的定義以及類別都有不同 的命名方式,但其內容大致相同,本研究是著重於崩塌地於影像上的偵測, 8.
(27) 強調視覺上崩塌地的萃取以及探討,不著重於崩塌地的名稱以及類型,其 崩塌地判釋依據為表 2-2 所示;判釋準則如表 2-3 所示。 表 2-2、崩塌地判釋依據(潘國樑,2009) 項目. 崩塌地特性. 外型. 現狀、條狀、眼淚、彗星、舌型等。. 長寬比. 較大。 新型崩塌地:明亮水藍、灰藍、灰白色。. 色調. 舊型崩塌地:藍棕色。. 坡度. 較陡 表 2-3、崩塌地判釋準則 說明 治 政 新型崩塌地 視為崩塌地。 大 舊型崩塌地 視為崩塌地。 立 項目. 不視為崩塌地。. 學. ‧ 國. 人工建物(道路、田地). 不視為崩塌地。. 陰地地區崩塌地. 視為崩塌地。. 雲層覆蓋區域. 不視為崩塌地。. ‧. 河道淤積(主河道、河道旁淤積). n. er. io. sit. y. Nat. al. Ch. engchi. 9. i n U. v.
(28) 第二節 原始影像前處理相關研究 台灣由於四面環海、加上山地面積占全台面積的 2/3 以上,充分的水 氣配合地形因素,易有雲層的產生,並且其雲層會減弱並遮擋遙測感測器 對地物之輻射訊號,進而影響資料的蒐集。同時,太陽的照射也會於雲層 及山地地區產生陰影,使影像上無法正確地紀錄陰影內之地物的光譜反射 值,基於此,在台灣遙測影像原始的處理中,首先必須先偵測出雲覆蓋和 陰影區域,以便後續於影像中進一步的分析與應用(劉致亨,2009)。本 研究所採取分析的資料為 DMC 航照原始影像,因此需先處理原始影像上. 政 治 大. 之雲層和陰影地區部分,相關的文獻如下:. 立. 一、雲層偵測之相關研究. ‧ 國. 學. 目前影像上雲層偵測依據其影像拍攝時段之相關研究中,可分為(1). ‧. 多時段偵測以及(2) 單時段偵測。多時段偵測雲層的處理,其概念為利. y. Nat. 用兩張以上的衛星影像或航照影像,在相同地區於短時間內偵測光譜變化. er. io. sit. 大的地物,即為雲層區域,如圖 2-1 所示,左半部表示位於相同地區 20 分 鐘前的影像,右半部表示位於相同地區 20 分鐘後的影像。由此可知,雲層. al. n. v i n 地區於相同地區中其光譜的變化程度較其他地物 (建物)來的大(徐逸祥, Ch engchi U 2006)。. 薄雲. 建物. 圖 2-1. 多時段雲層偵測示意圖(徐逸祥,2006). 10.
(29) 單時段偵測雲層的處理,顧名思義,表示雲層的偵測僅藉由在一張影 像上處理。此部分的處理為利用雲層和其他地物之間的空間關係作為判釋 的依據,如雲覆蓋地區的光譜反射值高於周圍地物的光譜反射值,可利用 此種空間關係將雲覆蓋地區偵測出來,如圖 2-2 所示,由左半部可知雲覆 蓋地區附近會產生雲影,並且位於山區的雲層周圍的地物大部分為植被地 區,因此,雲覆蓋地區的空間特徵為光譜亮度值高的區域被光譜亮度值低 的區域圍繞;相對沒有雲層遮蔽的影像,如圖 2-2 右半部表示,雖然影像 中有光譜反射值高的地物,但並沒有被光譜反射值低的區域包圍,因此,. 政 治 大. 表示此影像中並沒有雲覆蓋地區(徐逸祥,2006)。. 立. ‧. ‧ 國. 學 y. 雲層和其他區域空間特徵圖(徐逸祥,2006). sit. Nat. 圖 2-2. n. al. er. io. 不論是多時段的雲層偵測或單時段的雲層偵測,都需要先偵測出初步. i n U. v. 的雲層區域,常見的偵測方法如表 2-4、表 2-5 所示:. Ch. engchi. 表 2-4、雲層偵測方法. 學者. 名稱. Crist. 纓帽轉. (1984). 換法. 原理. 限制. 利用纓帽轉換公式,轉換成可 此方法適用於 Landsat 以量測地物濕度的纓帽第三 TM 衛星影像上。 波段。. Liang. 利用地物被雲層遮蔽時於可. 判釋時需同時觀測雲. 見光波段和紅外波段反射能. 層覆蓋和無雲覆蓋的. 量的差異程度判釋雲層區域。. 影像之相同地物。. Liang. (2001) 演算法. 11.
(30) 表 2-5、雲層偵測方法(續) 學者. 名稱. 原理. 限制. 比較地物被雲層遮蔽時於. 需同時觀測雲層覆. Zhang. 最優薄雲演. 藍色波段和紅色波段反射. 蓋和無雲覆蓋的影. (2002). 算法. 能量的差異程度判釋雲層. 像之相同地物,使得. 區域。. 偵測和判釋。. 利用雲層區域的光譜亮度 直方圖和其他非雲層區域 Richter. 直方圖門檻. 於薄雲地區無法有 之光譜亮度直方圖,統計並. 合理化雲模. 利用太陽的輻射衰減、太陽. 需同時觀測雲層覆. 型 t 值分析. 輻射角度、地物點的輻射反. 蓋和無雲層覆蓋之. ‧. Nat. io. 解帕森方程. (2010). 式演算法. 利用解帕森方程式原理,將. 需同時觀測雲層地. 影像上雲層之填補區和其. 區影像和無雲層地. al. n. 蔡博閎. y. 射率建立雲層偵測方程式。 影像以建立方程式。. sit. 演算法. er. (2009). 效地偵測雲層。. 學. 劉致亨. 政 治,以偵大 比較兩者之間的差異 立 測出雲層區域。. 值. ‧ 國. (2006). iv 區影像,才可將雲層 n U. 他地區在顏色上的差異達. Ch. engchi. 到最小。. 覆蓋區域填補。. 由表 2-4、表 2-5 得知目前雲層偵測的方式有門檻值法、影像不同波段 比例法(Liang 演算法、最優薄雲演算法)、和大氣數學模型法(合理化雲 模型 t 值分析法)和監督式分類搭配形態學法等。這些方法中,都有其限 制因素(表 2-4、表 2-5)。本研究為針對單時段影像雲層的偵測,所以重 心為放在影像中雲層區域的偵測,並不考慮雲層區域影像的填補階段。因 此,本研究對雲層偵測的方法為門檻值法。首先統計其影像的光譜亮度值 分布,以獲得雲層地區的初步門檻值,接著利用區域成長法將外圍的薄雲. 12.
(31) 地區偵測出來,以補足 Richter 學者所提出該方法於薄雲地區偵測不佳的缺 陷。 二、陰影地區偵測及填補之相關研究 陰影區偵測常見的方法為直方圖門檻值法(Chen et al., 2007)。而對 陰影區域填補的方法常見的為線性相關糾正法(Dare, 2005)以及多源資料 融合偵測法(Zhou et al, 2009)。 直方圖門檻值法利用影像中地物光譜分佈形狀,找出合適的光譜值作 為陰影區偵測的門檻值,如圖 2-3 所示,可之影像中地物光譜分佈呈現雙. 政 治 大. 尾的趨勢,又前半部波峰值若低於一定的值以下,則此波峰所涵蓋的區域 有可能為陰影區。. 立. ‧. ‧ 國. 學 er. io. sit. y. Nat. n. a l 圖 2-3 直方圖門檻值偵測法 v i n Ch engchi U. Dare 學者提出線性相關糾正法(Linear Correlation Correction)理論, 能有效萃取陰影地區的地物資訊。首先利用直方圖門檻值法找出陰影地區, 接著利用陰影地區和非陰影地區之反射光譜能量關係所建立的線性轉換公 式將陰影地區的地物光譜轉換成陰影過濾(Shadow-removed)影像。 多元資料陰影地區偵測法為利用相同地區不同時期的影像資料,提升 影像中陰影地區分類的精度。Zhou 等人(2009)於相同地區 1999 年和 2004 年兩張影像,分類出影像中不同的植被地區種類和人工建物地區。由於 2004 年影像受到陰影遮蔽的情形較 1999 年來的嚴重,因此該研究利用 1999 年 的影像輔助 2004 年的影像地物分類判釋,以提高陰影地區分類的精度。 13.
(32) 本研究處理的原始影像大多分佈在山地地區,所以受到陰影遮蔽的情 形嚴重,同時本研究是要針對每張影像建立自動化的方式逐一的偵測崩塌 地區域。因此本研究針對陰影區的崩塌地偵測首先利用影像中地物之光譜 亮度值分佈找出陰影地區門檻值,接著利用線性相關糾正法將陰影地區地 物之亮度值調整至非陰影地區的分佈,最後再針對調整後的陰影地區萃取 其崩塌地。. 立. 政 治 大. ‧. ‧ 國. 學. n. er. io. sit. y. Nat. al. Ch. engchi. 14. i n U. v.
(33) 第三節 影像偵測崩塌地之相關研究 本研究利用物件導向分類法於影像中偵測崩塌地,又於物件導向分類 流程中,首要的就是影像分割。因此,關於影像偵測崩塌地的相關研究中, 首先為影像分割的相關研究,接著為影像分類法,最後為影像上偵測崩塌 地之相關研究整理。 一、影像分割法 影像分割的目的將影像依照其同質性分割成不同區塊。區塊內的像元. 政 治 大 主要可以分成三種方式(Pekkarinen, 2002),分別為像元式(Pixel-based) 立 同質性高,異質性低;區塊和區塊之間彼此之間的同質性低,異質性高。. 的分割、邊緣式(Edge-based)的分割以及區塊式(Region-based)的分割。. ‧ 國. 學. 像元式的分割方式有兩種,門檻值法(thresholding)和群集(Clustering). ‧. 分析。門檻值法制定的方式有全域(Global)和區域(Local)兩種,全域. y. Nat. 即為整張影像中制定一個門檻值分割影像,此種方式為二元式的分割;區. er. io. sit. 域的分割方式為利用罩窗於該範圍內統計其區域的光譜亮度質之直方圖分 佈,以得到該區域內門檻值,如圖 2-5 所示,選取該區域內兩個波峰之間. al. n. v i n 直作為該區域分割的門檻值,所以每個區域內的門檻值皆不相同。 Ch engchi U. 圖 2-4. 區域分割門檻值示意圖. 15.
(34) 群集分析應用於影像分割的技術如圖 2-5 所示,其每個群其的特性為 群集內的點與點之間的異質性(以距離來表示,當距離越小,表示異質性 越小;若距離越大,表示異質性越大)越小;相對群集與群集之間的異質 性越大。因此,於影像分割的應用中,即為每個像元與像元之間的光譜反 射值差異程度表示異質性大小程度,當像元彼此之間的光譜反射值差異越 大時,表示像元之間的異質性越大,此時兩者會被分割成不同的區塊;相 對若像元彼此之間的光譜反射值差異越小時,表示像元之間的異質性越小, 此時兩者會被歸類為同一區塊(Tan et al., 2006)。. 立. 政 治 大. ‧. ‧ 國. 學. al. er. io. sit. y. Nat. 群集分析示意圖(Tan et al., 2006). n. 圖 2-5. Ch. engchi. i n U. v. 像元式分割方法的缺點為僅利用像元之光譜反射值作為分割門檻值的 依據有限,同時此種分割方式沒有考慮到地物的空間關係,可能會把影像 中光譜反射值差異小但位於不同地區的像元分割成同一區塊(Haralick and Shapiro, 1985)。 邊緣式的分割方式為利用邊緣增強(Edge Enhancement)的技術將影像 中的邊緣地區偵測出來,接著分割的根據為該邊緣所圍繞的區域視為一個 區塊。邊緣偵測的流程首先為平滑(Smoothing),此部分為將影像中的雜 訊過濾。接著為影像銳化(Sharpening),此部分利用高通濾波器(High Pass. 16.
(35) Filter)將影像中頻率較高的值(通常為邊緣區域)過濾出來,常見的高通 濾波器有 Sobel 濾波、Roberts 濾波(圖 2-6 至圖 2-9)。 [ 圖 2-6. ]. Sobel 濾波(x 梯度方向) [. 圖 2-8. [ 圖 2-7. ]. Sobel 濾波(y 梯度方向). ]. [. Roberts 濾波(x 梯度方向) 圖 2-9. ]. Roberts 濾波(y 梯度方向). 影像銳化之後,利用門檻值方法將邊緣區域的像元萃取出來,此步驟. 政 治 大 便完成影像邊緣的偵測與萃取(Jain et al, 1995)。 立. 稱為偵測(Detection)。最後,將所萃取之邊緣點位連結(Linking)起來,. ‧ 國. 學. 邊緣式的分割的缺點為影像中地物的邊緣未必都能被萃取,另外,所 萃取出來的邊緣線未必都能閉合起來。因此,利用此分割方法無法完善地. ‧. 分割影像。. sit. y. Nat. 區塊式的分割方法常見的為區域成長法(Region Growing),方法為於. al. er. io. 影像中以隨機的方式選取種子點(Seed),並且這些種子點作為區塊成長. v. n. 的初始點。接著於各個種子點開始區塊成長,其成長的方式為根據像元和. Ch. engchi. i n U. 像元之間其光譜亮度值和所定的門檻值之間的大小關係,若鄰近像元彼此 之間的光譜亮度值差小於所定的門檻值,則將像元合併,即所謂的區塊成 長;相對若鄰近像元彼此之間的光譜亮度值大於所定的門檻值,則停止區 塊生長(Haralick and Shapiro, 1985)。. 圖 2-10. 區域成長法(1). 圖 2-11 17. 區域成長法(2).
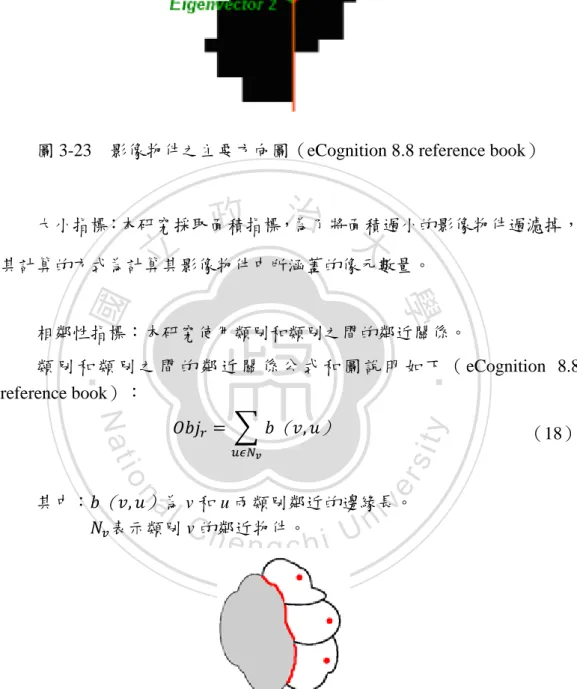
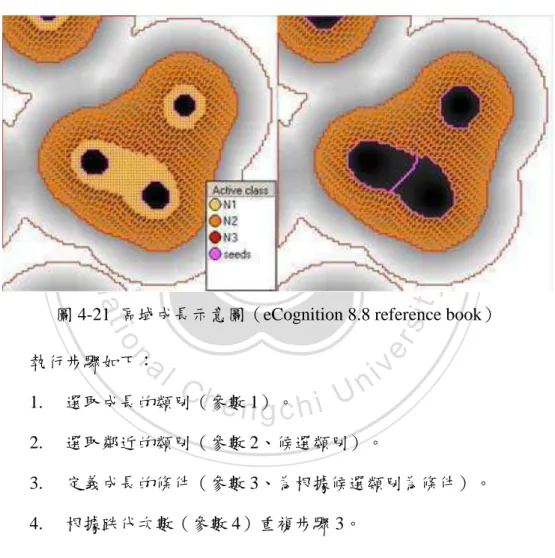
(36) 圖 2-12. 區域成長法(3). 圖 2-13. 區域成長法(4). 圖 2-10 至圖 2-13 為區域成長法的示意圖(邱瑩潔,2004),圖 2-10 為影像中的種子點,其光譜反射值為 5,接著由此種子點向八方鄰方向成長, 此示意圖之門檻值設定為 5,也就是說,像元彼此之間的光譜亮度值差異必. 政 治 大. 須在 5 之內才會成長。圖 2-11 和圖 2-12 為此種子點成長的過程。最後將區. 立. 塊成長的結果標籤(Labeling),如圖 2-13 所示,區塊內的像元標籤為 1,. ‧ 國. 學. 區塊外的像元標籤為 0,即完成區域成長法。. 此種區塊式的分割方式的有兩個問題,第一是要如何決定像元和像元. ‧. 之間的門檻值。第二是要如何決定分割的數量(種子點數量)。. y. Nat. sit. 除此之外,上述的所提的影像分割方法,不論是像元式、邊緣式和區. n. al. er. io. 塊式的分割方法,其技術大部分沒有同時包含光譜(Spectral)和空間(Spatial). i n U. v. 的關係。因此,Baatz 和 Scahpe (2000)提出一個同時包含光譜以及空間. Ch. engchi. 的影像分割技術,稱之為多重解析度分割法(Multiresolution Segmentation) 。 此分割技術在光譜方面考量各波段影像像元之光譜反射亮度值,並且對不 同的波段可以給予不同的權重;在空間方面考量區塊之形狀,以不同的形 狀因子表示區塊形狀情形。此外,可藉由設定不同的門檻值,以顯示不同 的分割狀況,此種概念稱之為多重解析(Multiresolution),為目前較佳的 分割技術。因此,本研究採用多重解析分割法技術作為物件導向上之影像 的區塊分割。. 18.
(37) 二、影像分類法 影像分類法的技術種類依據選取訓練樣區與否可分為監督式 (Supervised)和非監督式(Unsupervised)分類;依據分類模糊程度可分 為硬式(Hard)以及模糊(Fuzzy)分類;依據分類的最小單元可分為像元 式(Pixel-based)和物件導向分類(Object-oriented),說明如下(Jensen, 2006): 監督式分類的流程如圖 2-14 所示,首先以人為的方式於影像中選取欲 分類類別的地物樣本區,接著將這些樣本區放入分類器(Classifier),常. 政 治 大 (Minimum Distance) 立以及支持向量機(Support Vector Machine)等。因此,. 見的分類器有 最大概 似法 (Maximum Likelihood )、最短距離分類法. ‧ 國. 學. 須以訓練樣區的地物資料訓練分類器,以建立分類器對各個地物之分類模 式,使之可以對其他未選取到的訓練樣區資料分類。最後再評估其分類的. io. n. al. 圖 2-14. Ch. 分類影像中非訓 練樣區區域. sit. 訓練分類器,建 立分類模式. 精度評估. er. Nat. 訓練樣區選取. y. ‧. 精度。. 監督式分類流程圖. engchi. i n U. v. 非監督式分類的 流程如圖 2-15 所示, 首先為 選取群集分析技術 (Clustering)或建立地物之判釋準則(Rule-based)作為影像分類的依據。 若是利用群集分析技術,則可以初步地將整張影像中之像元光譜反射值接 近的地物分群出來。接著再利用人為的方式標籤各個群集,最後評估分類 的結果。常見的分群技術有基於中心點為主的 K-means 演算法、基於階層 為主完全鏈結(Complete Link)演算法或單一鏈結(Single Link)演算法、 基於密度的 DBSCAN(Density-based Spatial Clustering of Application with Noise)演算法和改良 K-means 演算法的 ISODATA(Iterative Self-Organizing Data Analysis)演算法(Jensen, 2006; Tan et al., 2006)。 19.
(38) 另外除了利用分群技術應用於非監督是影像分類外,也可以建立地物 分類準則直接分類影像中的地物,此種概念為基於知識庫為主 (Knowledge-based)的分類模式(Song and Civco, 2002)。通常此種分類 方式為建立在物件導向分類方法中,利用影像中每個物件的光譜(Spectral)、 紋理(Texture)、形狀(Shape)、面積(Area)和地形(Topography)等 指標建立地物的分類準則。. 學. 圖 2-15. 非監督式分類流程圖. ‧. ‧ 國. 立. 政 治 大. y. Nat. 因此,由上述可知群集分析需要後續的人為加入以標籤地物類別,但. er. io. sit. 若是建立分類準則可不需要加入此流程,以提高整體分類流程自動化程度。 此外,雖然監督式分類透過訓練樣區的選取,可以提高地物分類的精度,. al. n. v i n 但選取訓練樣區需要人為的加入,如此會增加整體工作的流程。因此,本 Ch engchi U. 研究採取非監督式分類,並引入知識庫的概念對影像分類,以提升分類之 執行效率以及精度。 硬式分類以及模糊分類的區分在於其分類地物之模糊性程度。硬式分 類是指某地物屬於某類別的模糊性程度為 0%,表示某種地物只會屬於該類 別;模糊分類(Fuzzy),是指某地物屬於某類別的模糊性程度不為 0%, 比方該地物有 75%屬於類別 A,25%屬於類別 B。因此,大部分的影像分 類法為硬式分類,表示地物於影像分類的結果只會屬於某種類別,並且該 地物的分類結果不會同時包含兩種以上的類別。但影像上的每個像元無法 20.
(39) 確切地表明只屬於某一種地物或其他地物,是由於在自然的地物環境中, 如土壤區域,可能也包含水體、植被等地物,因此,軟式分類(模糊分類) 為一種較貼近真實環境的分類方式,應用於高精度的土地覆蓋影像分類中 (Foody, 1996) 。一般來說,若影像的影像的 GSD(Ground Sample Distance) 越大,則一個像元包含的地物類別也越多,適合考量模糊分類的成果,以 提高地物分類精度,而本研究所採取的航照影像之地面取樣距離為 0.25 m, 所以採取硬式分類的方法。 像元式和物件導向的分類方式之差異為分類的最小單元。像元式的分. 政 治 大 像元彼此之間的同質性將影像分割成許多區塊,接著依據每個區塊當作最 立. 類方式是以每個像元當作最小單元分類;物件導向的分類方式,首先依據. 小單元分類地物。. ‧ 國. 學. 目前衛星影像的空間解析度已經可以達到公分等級,如 WorldView-2. ‧. 感測器之全色態影像之空間解析度為 0.46 x 0.46 m;IKONOS 感測器在全. y. Nat. 色態的空間解析度為 0.82 x 0.82 m;QuickBird 感測器於全色態之空間解析. er. io. sit. 度為 0.61 x 0.61 m。除此之外,空載航照影像以及無人飛行載所拍攝的影 像之空間解析度也都為公分等級。因此,影像上一個像元無法確切地表示. al. n. v i n 地面資訊,並且大氣的互動作用如反射、吸收、放射和散射等會影響感測 Ch engchi U 器接收地物的反射能量,使其記錄於該像元的影像為雜訊所在,因此,若 利用像元式的分類法於高空間解析度影像時,其雜訊的像元無法被正確的 分類,此種現象稱之為椒鹽效應(Salt and Pepper Effect),如圖 2-16 所示, 藍色圈圈表示正確的分類結果,綠色圈圈和黃色圈圈為錯誤的分類結果, 造成此原因為影像之空間解析度太高,例如影像上一個像元對應於真實地 表的解像力高達數十公分時,其單一像元無法精確地代表真實地物資訊, 甚至會誤分類成雜訊區域,如上述的綠色圈圈和黃色圈圈所示(Yu et al., 2006)。 21.
(40) 圖 2-16 椒鹽效應示意圖 解決椒鹽效應的分法有許多,如利用高斯濾波器(Gaussian Filter)、. 政 治 大. 中值濾波器(Median Filter)或傅立葉轉換(Fourier Transform)過濾影像. 立. 的雜訊(Chi et al., 2008; Alamri et al., 2010)。高斯濾波器和傅立葉轉換屬. ‧ 國. 學. 於低通濾波器,其過濾雜訊原理為保留影像中的低通區域(灰階梯度變化 低),過濾高通區域(灰階梯度變化高)。影像中的雜訊,其光譜反射值. ‧. 之梯度較周遭地物來的高(高通區域),所以利用高斯濾波器可以過濾影. y. Nat. sit. 像中的雜訊。但此過濾器的缺點為會將其他地物光譜反射梯度較高的地區. n. al. er. io. 平滑化,如地物邊緣線區域。. i n U. v. 資料中的中值,顧名思義,即為將資料值從小依序排到大,位於中間. Ch. engchi. 的資料值,稱之為該資料的中值。因此,中值濾波器所獲取影像內的光譜 反射值,是根據該罩窗範圍之光譜反射值的中值。此種轉換方式較高斯濾 波器來得佳,對影像中的邊緣地區影響較小。圖 2-17 為的包含雜訊的影像, 圖 2-18 為利用中值濾波器過濾雜訊後的影像。. 22.
(41) 圖 2-17. 雜訊處理前影像. 圖 2-18. 雜訊處理後影像. 政 治 大 一像元就可以決定的,此外,利用像元式的分類方式不能建立地面地物和 立 雖然可以利用濾波器將影像中的雜訊過濾,但真實的地物並不是由單. ‧ 國. 學. 地物之間的關係,因此,物件導向的分類方式被引進,首先先以影像分割 的技術依據像元和像元之間的同質性和異質性將影像分割成許多區塊,以. ‧. 各個區塊當作分類的最小單元,如此,可以有效地將影像中的雜訊過濾,. sit. y. Nat. 避免椒鹽效應的現象,如圖 2-19 所示,紅色外框內的像元被分割成一個物. al. er. io. 件,儘管此物件內的像元有錯誤的分類,如橘色和綠色圈圈,但在此物件. v. n. 中以正確分類的像元(藍色圈圈)數量居多,因此,此物件可以在像元光. Ch. engchi. i n U. 譜反射值不被轉換的情況下獲得正確的類別(藍色圈圈)。. 圖 2-19. 物件導向分類示意圖. 23.
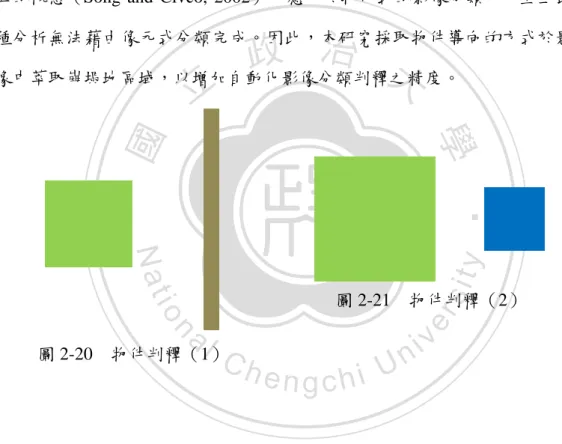
(42) 此外,物件導向的優點為可以利用所分割出來的物件之形狀、大小(面 積)、光譜和相鄰等關係判釋物件,如圖 2-20 和圖 2-21 所示,圖 2-20 左 邊為田地、右邊為道路,此兩種人工地物可利用形狀(田地形狀接近矩形、 道路形狀狹長)、相鄰(田地旁有道路)等關係將田地和道路判釋出來; 圖 2-21 為判釋田地和房舍,可以利用兩者的面積(田地面積較大,房舍面 積較小)或光譜資訊(由植被指標如常態化植生指數判釋)。此種為語意 (Semantic),即以人的記憶和思考為主(Quillian, 1968),同時也為知識 庫的概念(Song and Civco, 2002),應用於物件式的影像分類中,並且此. 政 治 大 像中萃取崩塌地區域,以增加自動化影像分類判釋之精度。 立. 種分析無法藉由像元式分類完成。因此,本研究採取物件導向的方式於影. ‧. ‧ 國. 學. n. al. Ch. 物件判釋(1). engchi. 24. 物件判釋(2). er. io 圖 2-20. sit. y. Nat. 圖 2-21. i n U. v.
(43) 三、相關研究整理 國內關於崩塌地偵測之研究相當多,本文整理國內近十年來部分關於 崩塌地偵測之研究,以說明本研究的目的和價值。 表 2-6、近十年來國內崩塌地之研究 作者. 題目. 影像資料. 分類方式. 分類指標. 以遙感探測方法探討公路邊 涂書芳 (2001). 坡穩定的重要因子-以南橫 SPOT 衛星影 多變量分析 坡度、常態化植 公路甲仙至啞口段為例 像、航照正射影 法、類神經網 生指標、地層種 像 路分析法 類、高程、水系 監督式分類、像元式分類 波段比例 植生指標差 政 治 SPOT 衛星影 大 遷之偵測研究─以和社地區 法、簡單直線 標、常態化植生 像、航照正射影 立 為例 回歸、主成分 指標、轉換植生 SPOT 衛星影像於裸露地變. 黃筱梅 (2001). ‧ 國. 衛星影像於崩塌地自動分類. 學. 像. 非監督式分類、像元式分類. 分析. 指標. y. er. sit. 遙測及景觀分析技術於崩塌 邊緣指標、面 地判釋與變化之研究 SPOT 衛星影像 最大概似法 積、形狀、坡度 監督式分類、像元式分類。. io. al. v i n 小波轉換應用於影像自動判 Ch QuickBird 衛星 chi U 釋崩塌地分析 e n g影像、航照正射 n. 高玉惠 (2004). Nat. 陳駿賢 (2003). ‧. 組合之研究 劉守恆 常態化植生指 SPOT 衛星影像 波段比例法 (2002) 監督式、非監督式分類、像 數、坡度 元式分類. 小波轉換. 紋理. 影像. 非監督式、像元式分類. 葉雅馨 (2006). 用 LiDAR 與航照影像於崩 福衛二號衛星 塌地判釋之研究 影像、航照正射 最大概似法 影像 監督式分類、像元式分類. 光譜、地形. 劉晃丞 (2006). 應用高程差與福衛二號影像 福衛二號衛星 共同判釋新崩塌地 影像 監督式分類、像元式分類. 光譜、地形. 25. 最大概似法.
(44) 表 2-7、近十年來國內崩塌地之研究(續) 作者 王吉成 (2007). 陳俊良 (2008). 楊孟學 (2008). 題目. 影像資料. 分類方式. 分類指標. SPOT 衛星影像. 決策樹法. 常態化植生指 數、波段比值、 高程、距道路距 離. 以物件式分類法則分析崩塌 非採用影像分 地形粗糙度之研究 析,為採用 DTM 資料分析 非監督式分類、物件式分類. 準則建立. 紋理、坡度、坡 向. 連續型粗糙集理論資料萃取 技術—以雪霸崩塌地為例 監督式分類、像元式分類. 結合空載光達與多波段衛星 影像於山崩自動分類. 最大概似 常態化植生指 法、最短距離 SPOT 衛星影像 數、光譜、高 法、馬式距離 程、坡度 監督式分類、像元式分類 法. 治 政 大 應用多光譜影像多種特徵偵 洪凱政 立 測崩塌地之研究 SPOT 衛星影像 準則建立 (2009) ‧ 國. 學. 非監督式分類、物件式分類 應用空載光達與正射影像以. 準則建立. ‧. 鄭智仁 物件導向影像分析法進行自 航照正射影像 動化崩塌地偵測 (2010). 形狀、紋理、光 譜、坡度、坡 向、常態化植生 指數. y. Nat. 非監督式分類、物件式分類. 常態化植生指 數、紋理、光 譜、坡度、高程. sit. n. al. er. io. 物件導向分析方法應用於遙 監督式分 測影像之分區及崩塌地與人 類:最大概似 形狀、紋理、光 黃韋凱 福衛二號衛星 工設施分類 法;非監督式 譜、坡度、常態 (2010) 影像 分類: 化植生指標 監督式分類、非監督式分 準則建立 類、物件式分類 王主一 (2012). Ch. engchi. i n U. 運用物件導向方法進行崩塌 地自動判釋. 航照正射影像. 監督式分類、物件式. v. 支持向量 機、K 鄰近法. 光譜、高程. 使用多尺度多階段物件導向 UAV 空載影 光譜、常態化植 詹鈞評 影像分析技術進行崩塌地判 像、航照正射影 多尺度準則 生指標、紋理、 釋 (2012) 像、福衛二號衛 建立 高程 星影像。 非監督式分類、物件式. 26.
(45) 將表 2-6 以及表 2-7 關於崩塌地的研究,進一步將各個崩塌地研究所使 用的影像來源資料和分類方式整理如下: 表 2-8、近十年來國內崩塌地之研究比較 項目. 作者. 比例. 幾何糾正衛星 影像. 涂書芳(2001)、黃筱梅(2001)、劉守恆(2002)、 陳駿賢(2003)、高玉惠(2004)、葉雅馨(2006)、 劉晃丞(2006)、王吉成(2007)、楊孟學(2008)、 洪凱政(2009)、詹鈞評(2012). 11/15. 原始衛星影像. 黃韋凱(2010). 1/15. 正射航照影像. 涂書芳(2001)、黃筱梅(2001)、高玉惠(2004)、 葉雅馨(2006)、鄭智仁(2010)、王主一(2012)、 詹鈞評(2012). 7/15. 原始航照影像. 立. 政 治 大. 0/15 8/15. 非監督式分類. 黃筱梅(2001)、劉守恆(2002)、高玉惠(2004)、 陳俊良(2008)、洪凱政(2009)、黃韋凱(2010)、 詹鈞評(2012). 7/15. y. Nat. n. al. 物件導向分類. 8/15. er. sit. 涂書芳(2001)、黃筱梅(2001)、陳駿賢(2003)、 高玉惠(2004)、葉雅馨(2006)、劉晃丞(2006)、 王吉成(2007)、楊孟學(2008). io. 像元式分類. ‧. ‧ 國. 學. 監督式分類. 涂書芳(2001)、劉守恆(2002)、陳駿賢(2003)、 葉雅馨(2006)、劉晃丞(2006)、王吉成(2007)、 楊孟學(2008)、黃韋凱(2010). i n U. v. 陳俊良(2008)、洪凱政(2009)、鄭智仁(2010)、 黃韋凱(2010)、王主一(2012)、詹鈞評(2012). Ch. engchi. 6/15. 從表 2-8 可知近十年來崩塌地影像偵測之研究其影像來源大部分是以 衛星影像居多,其次為航照正射影像;影像分類的分式,大部分是採取監 督式分類,其次為非監督式分類;分類所採取最小單元方式,大部分為像 元式分類,其次為物件式分類。 因此,本研究所選取的分析影像資料來源為 DMC 航照原始影像,不 同於衛星影像和航照正射影像,所以原始影像於崩塌地偵測的方式也稍有 不同,如各項萃取崩塌地判釋之指標值的設定、雲覆蓋和陰影地區的處理 等。此外,本研究採取非監督式分類,利用建立準則的方式自動化萃取崩 27.
(46) 塌地,不同於監督式分類。其監督式分類需要先人工選取訓練樣區並放入 分類器訓練,所以針對每張影像需要重新選取訓練樣區才能後續分類影像, 如此需花費較多的時間進而影響整體崩塌地偵測的作業效率。最後,本研 究利用物件導向的分類方式,不同於傳統的像元式分類。傳統的像元式分 類是以像元當作分類的最小單位,於高空間解析度影像上分類時會有椒鹽 效應的問題,並且以像元式分類的方式較不符合人眼視覺判釋的邏輯,相 對物件導向分類可將地物依其同質性和異質性分割成區塊(物件),每個 區塊於不同的地物時有不同的形狀、光譜、紋理、面積、地形和空間(位. 政 治 大 表 2-8 中關於使用原始影像於崩塌地萃取的前人研究中,為了區別崩 立. 置)等關係,為目前較佳的分類方式。. 塌地和其他接近崩塌地之地物,如河道之土石淤積和道路等地區,大部分. ‧ 國. 學. 是採取監督式分類,但如此會增加崩塌地萃取的作業程序。雖然本研究分. ‧. 析的影像為原始影像,沒有地圖坐標資訊,但本研究使用光線追蹤法將初. y. Nat. 步萃取的崩塌地資料由影像坐標轉換至地圖坐標,如此可自動化並套疊地. n. er. io. al. sit. 形資料以提高崩塌地的萃取精度。. Ch. engchi. 28. i n U. v.
數據
相關文件
The Peunayong Downtown area is in need of rejuvenation because this area considered as the Central Business District (CBD) of Banda Aceh city which in turn supports
In this paper, the study area economic-base analysis and Location Quotient method of conducting description, followed by division of Changhua County, Nantou County,
Then using location quotient(L.Q.)to analyze of the basic industries in the metropolitan area, and population and employment multiplier of Hsinchu Area and Miaoli Area are analyzed
The objective of this study is to analyze the population and employment of Taichung metropolitan area by economic-based analysis to provide for government
In this study the GPS and WiFi are used to construct Space Guidance System for visitors to easily navigate to target.. This study will use 3D technology to
(That year was chosen because the Catholic Diocese of Hsinchu was established and church work began in the area in 1951.) So the first thing is a historical overview of
Our country much about real case that mining industry visit at present, but area these is it perfect planning to make in early days to develop to visit, make the economic
To maximize coverage rate and minimize overlapping sensing area, we propose a greedy algorithm to find an arc on the circumference of the minimum overlapping area which can
