行政院國家科學委員會專題研究計畫 成果報告
以機電整合為出發點之智慧型嵌入式複合控制系統-新型平
面磁浮系統設計與控制應用─子計畫二:智慧型嵌入式複合
系統控制方法之研究(3/3)
計畫類別: 整合型計畫 計畫編號: NSC91-2213-E-002-023- 執行期間: 91 年 08 月 01 日至 92 年 07 月 31 日 執行單位: 國立臺灣大學電機工程學系暨研究所 計畫主持人: 陳永耀 計畫參與人員: 林卓毅、徐仲安、林政廷、林耿賢 報告類型: 完整報告 處理方式: 本計畫可公開查詢中 華 民 國 92 年 11 月 3 日
一、前言
此計畫內容為整合型計劃─「智慧型嵌入式複合控制系統─新型平面磁浮系 統設計與控制應用」之子計劃二:「智慧型嵌入式複合系統控制方法之研究」的 執行成果。高科技產業持續發展,尤其是半導體製程之精密度不斷提昇,使得製 程設備之定位要求亦不斷增加。本計劃針對工業發展趨勢,進行斥力型平面磁浮 系統之智慧型嵌入式複合控制方法研究。主要之目標在以嵌入式硬體架構及智慧 型複合式控制方法達成平面磁浮精密定位之任務。 由於斥力型磁浮系統在水平方向具有不穩定特性,使載具在穩定懸浮的部分 遭遇了困難,所以研究必須建構準確的動態模擬系統,藉由觀察載具在磁浮環境 下的動態運動行為來做控制器的設計。研究重點為: 1. 建構磁浮平台的動態模擬系統, 2. 驗證現行平台及載具設計之可行性, 3. 磁浮平台上載具的運動控制。二、研究背景
隨著工業技術的進步,半導體製程對於精密度的要求也越來越高。一般而 言,高精密度定位控制的達成,必須具有高解析度的感測器,但系統仍會受到摩 擦力的限制;於是,克服摩擦力就成為高精密度定位控制及半導體製程目前極大 的課題。再者,IC 製造過程中,對空氣品質的要求也是非常嚴格的;如果空氣 中含有雜質,製成元件的品質即可能受到影響。因此,製造 IC 的儀器不但需要 使用改良過的軸承機構,以減少摩擦力的影響,其裝置場所也必須採用近真空的 密閉空間;最後,再配合上適當的控制理論,IC 的製程才能達到高精密定位控 制的要求。傳統接觸性的軸承裝置,不論如何加以改善,仍無法完全消除摩擦與 背隙等現象;此外,因為軸承磨損的緣故,機構零件也會產生微粒漂浮於空中。 為了解決上述因系統摩擦力而產生的問題,使用非接觸性的軸承將是 IC 製造產 業未來的趨勢。 非 接 觸 性軸 承大 概 可分 為 三類 , 氣墊 軸 承( Air bearing )、 電浮 軸 承 (Electrostatic bearing)以及磁浮軸承(Magnetic bearing):氣墊軸承是使 用空氣作為承載平台與系統基部的連結,所以不能在真空下使用;而電浮系統所 能提供的作用力,較同樣結構大小的磁浮系統為低。此外,電浮系統的電場會使 空氣中的微小粒子產生靜電,進而影響 IC 製程。綜合上述各點,磁浮軸承不但 因為無靜電、沒有磨損、不會製造顆粒、亦不需要潤滑作用,使得 IC 製造場所 能保持乾淨、無干擾的狀態;更因為磁浮軸承能達成無摩擦、無背隙的操作動作, 所以,磁浮系統必定是新一代半導體製造機台的最佳選擇。目前文獻中可以找到的磁浮系統大致可分為兩種:一種是吸力型的磁浮系 統,另一種是斥力型的磁浮系統。斥力型磁浮系統是由固定導軌用相斥力將承載 平台支撐起來,平台在導軌的上方,導軌上的永久磁鐵利用磁鐵斥力使平台浮起 來。不過根據 Braunbek [2]的研究結論:在磁浮系統中,任一個鋼體在靜磁場 中都無法得到一個穩定的狀態,除非是加上另一個導磁性或是超導性物體,並加 上適當的控制才能達到所要求的成果。因此在系統的磁浮平台系統也加了回授控 制,用電流產生磁場來控制其不穩定的天性。然而,不管是吸力型的磁浮系統或 是斥力型的磁浮系統,在平台的移動上依舊需要導軌的存在。雖然導軌有助於平 台運動控制的規律化與簡單化,但從另一個角度來看,導軌也限制了平台運動的 平滑性與多變性。因此,假若將導軌拿掉,再以多個電磁鐵驅動器取而代之,並 配合智慧型複合式的控制方法(Intelligent Hybrid Control),那整個磁浮平 台系統便將呈現一番新的風貌,非但能保有原來的優點,也會使平台的運動與系 統的定位更加快速與準確。 「機電整合」(Mechatronics)這個字眼已沿用了近半個世紀,雖然字面上的 意思是簡單的「機械-電子」,但其真正的概念是將「精密機械、電子控制以系 統整合的觀念運用在產品設計和製造過程上」。在工業界中,其具體的應用產品 如「數位控制工具機」與「SONY 機械狗」,諸如此類的成品都是將純機械構造的 機器,加入電子系統而增強產品的功能性與精密性,讓機械系統元件透過內建的 處理器(智慧型元件:智慧型驅動器與智慧型感應器)使元件智慧化。這樣不但可 以提昇系統的性能更可提高產品的競爭性。「機電整合」的萌芽全拜微處理器的 出現所賜,而近年來的微處理器已朝向高速與低價的趨勢,特別是價格低廉的「數 位訊號處理器(DSP) 」的發展,從控制的觀點而言,這意謂著控制工程師可引用 更高的採樣頻率(Sampling Rate)也就是伺服頻率(Servo Rate),進而使得控制 性能提昇,這樣的趨勢也使得上述的智慧型元件概念更容易實現,這些原因加速 了「機電整合」的成長茁壯,而且現在「機電整合」已經形成一股不可抵擋的潮 流。 在傳統上,系統的控制都是外接微電腦控制器來達到控制的目的,這樣的系 統大都不符合「輕薄短小」的要求,而目前全世界的潮流皆傾向可攜式(portable) 的產品,因此產品設計多強調機構與功能之整合;此外分開的機構與控制單元, 若是兩者任一個出問題,那整個系統就無法正常工作了,因此產品的整體保護性 差、故障率也比較高。隨著半導體製程的日益進步,使得微處理器快速發展和低 價位記憶晶片的普及化,使得上述的問題出現了轉機,以目前的技術,在機械機 構中「嵌入(embed)」能作較複雜運算的控制器已不再是困難的事;此一發展不 但提昇了系統的性能與其整體防破壞的能力,更使系統具備了自身的「校正」與 「偵錯」功能,讓許多以往需要技術經驗的操作工作,如今僅需簡易的訓練和直 覺化的使用步驟,即可完成。因此「嵌入式」(embedded)控制單元無疑解決了 傳統「外接式」 控制的問題,更帶來許多優點,這樣具有競爭性的方式也是逐 漸成為趨勢。
因為「機電整合」已成為潮流,又因為「嵌入式」控制單元已形成趨勢, 這 使得「機電整合」由以往較基礎的層次,即系統、感測器、驅動器的整合,到目 前「System on Chip」概念,也就是將過去的元件(包括感測器、驅動器)皆提昇 成智慧元件(Smart Component),因此龐雜的系統過去須仰賴過分負荷的中央處 理器(Central Process Unit)的現象已不再,倒是許多的區域性處理即在 Smart Actuator 或 Smart Sensor 內即予完成,而留下較不急迫的全域性處理於一 Host CPU 完成,這其中當然亦包括區域性處理之間,透過高頻寬的通訊網路作信息交 換,正由於此種革新式的架構較過去傳統分散式控制的架構更具彈性,因此更適 合處理複雜的複合式系統(Hybrid System),但當然,其間所適用的控制理論及 法則亦因而更迥異於過去傳統的作法。 傳統的單一控制設計,為了克服所有在受控系統和控制任務中可能出現的 軟、硬體限制及控制要求,往往必須在精密度與反應時間等系統表現上作折衷處 理;這也就意味著,設計人員無法在控制法則或控制器參數的選用上尋求某單一 標準下的最佳化。尤有甚者,若設計人員想得到一可涵蓋所有可能情況的控制 器,則此一控制器的控制法則勢必將變為非常複雜,其架構也十分龐大,使得及 時控制成為不可能的目標,更不用說設計過程的冗長繁雜,和系統修改更動的不 易進行。 相較之下,複合式控制將可輕易地解決上述各種困難,又能得到一接近最佳 化的控制效果。所謂的複合式控制(Hybrid Control),指的是將數個本質上相 異的控制機構加以結合,使整合後的總體控制器能順利達成任務的控制方法。此 種控制方法的好處在於設計人員能以數個較簡易的控制法則組合,讓控制器按照 受控系統的狀態,自動調整所使用的控制策略。如圖一所示,最常見的複合式控 制架構即為監督式複合控制(Supervisory Hybrid Control)[7]。在此種控制 架構下,數個待用控制器平行且同時地接受得自受控系統的系統資訊,並依其控 制法則運算出各自的控制命令;而處於上層的監督控制器,則依受控系統目前的 狀況與控制任務的需求,選出適用的控制命令。從程序控制(Process Control) 的角度看來,複合控制器結合了連續時態(continuous-time)與離散事件 (discrete-event)的控制特徵:監督控制器依照受控系統的狀態與控制任務進 行的階段切換次級控制器,以求達成一既定的控制任務。因此,複合控制系統的 自動化也可應用諸如 Finite State Machine、Petri Nets 等的理論加以設計應 用。 智慧型控制則是結合人工智慧與控制理論之新一代控制方法,其主要理論包 括了模糊控制、類神經網路控制、基因演算法等。由於複合式控制系統之設計往 往考慮到不同控制狀況與控制器之相互關係,因此與智慧型控制的結合應是極佳 之選擇。因此本計劃規劃以智慧型複合式控制方法做為控制的主要架構。
三、研究工作內容
本計劃(整合型計劃─智慧型嵌入式複合控制系統-新型平面磁浮系統設計 與控制應用-計劃二) 智慧型嵌入式複合系統控制方法之研究的工作內容主要可 分為以下幾部分:電磁鐵線圈磁路分析、利用曲線擬合求電磁鐵線圈的模型、磁 浮平台模擬系統之建構與模擬分析以及磁浮平台模擬系統之載具運動控制。
1、 電磁鐵線圈磁路分析:
1.1
Ansoft 電磁模擬軟體簡介
Maxwell 是一電磁元件的分析設計軟體,可做為低頻電機系統與高頻電子通 訊元件的分析模擬之用。Maxwell 軟體除了一般的學術研究用途外,已可廣泛的 應用於電子、資訊、微機電以及通訊工業等。由於是泛用型軟體,除了一般電磁 模擬之外,生物醫學的應用、微機電測感系統或天線所發射之電磁波動態行為都 可加以模擬。 本計畫所使用的為 Maxwell EM 模組,簡要介紹如下:
Maxwell 2D Field Simulator:可以分析 2D 元件之電磁場,主要是應用於 電容電感等參數之計算。
Maxwell 3D Field Simulator:此模組相當於提供一個軟體模擬的實驗室, 利用軟體模擬作產品性能評估,也就是改變幾何結構、材料、激勵等方式,藉由 3D 電磁場之模擬快速得到結果,節省設計時間與成本。 Maxwell EM 模組,含前處理程序與基本電磁分析功能及後處理功能,介紹 如下: 前處理程序(Preprocessor):這一部份主要是要建立待解問題的幾何結構 (包含二維及三維問題)、材料特性、邊界條件(Boundary condition)和激勵 (Excitation)等。 分析程式(Solver):分析程式依數值電磁方法的分類可分有限元素法及動差 法兩種。在有限元素方法為其基本分析法中,首先將幾何結構分割成數個小元素 (elements)後,在每一元素上用一低階多項式來近似其場解,然後利用變分方法 求解,此時每一元素上節點未知數變成矩陣方程式,最後求解矩陣方程式算出節 點未知數,便可得到每一元素上的場解。在動差法(Method of Moment) 為其基 本分析法中,是使用三角形塊(Triangular Patch)的基底函數(Basis function) 與自動調整網格分割法,這種基底函數可以將三維幾何結構上的電流分佈展開, 代入積分方程式內,利用動差法,求得每一三角形塊上的電流分佈進而求得電磁 場。 後處理程序(Postprocessor):由前一部份算出每一元素上的電磁場之後, 便可由此後處理程式計算出電流分佈、散射參數(Scattering Parameter)、Y(Z) 參數、Smith Chart、近場及遠場輻射場形、電磁干擾輻射頻譜分佈、等效電容、 電感、阻抗等…電路參數。
國家高速電腦中心提供教育版 Ansoft 相關軟體(HFSS, Ensemble, EM, SI)免費 使用,但僅限使用在學術用途上。
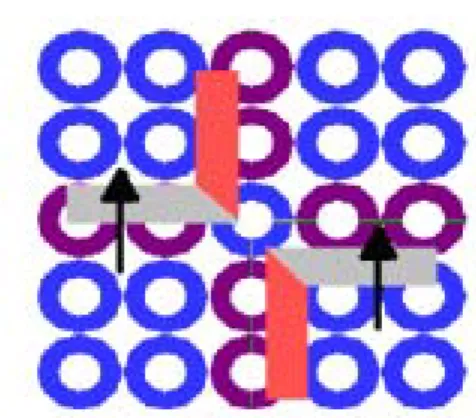
在建構平台模型時,要先針對每一個單一電磁鐵線圈作分析,又根據電磁學 理論,磁場強度具有加成性,所以整個平台的模型,就可以由每個單一電磁鐵線 圈的模型加成而得。先探討單一電磁鐵線圈影響範圍及電磁鐵線圈旋轉的影響, 接著驗證電磁鐵線圈的加成性質,最後探討電磁鐵線圈尺寸對其磁場分布的影 響。 在以下的模擬中,對於電磁鐵線圈的激磁電流大小,是考慮電磁鐵線圈繞線 匝數(N )與激磁電流強度(I )的乘積,即表示電磁鐵線圈繞線部分的截面積瞬間 通過的電流大小。在實際的電磁鐵線圈中,真正決定電磁鐵線圈周圍磁場強度的 因素,其實正是電磁鐵線圈繞線匝數(N )與激磁電流強度(I )的乘積。因為相同 尺寸的電磁鐵線圈可能因為用來繞線的銅質導線的粗細差異,而使電磁鐵線圈繞 線匝數不同,若僅考慮電磁鐵線圈繞線匝數或激磁電流強度都不正確,故計畫研 究中,對於電磁鐵線圈的激磁電流大小,均以圈繞線匝數(N)與激磁電流強度(I ) 的乘積表示。 圖 1.1 激磁電流示意圖 若N×I =250A 表示電磁鐵線圈繞線匝數(N )與激磁電流強度(I )的乘積為 250 安培,也就是在圖 1.1 箭頭所指入的截面積中,瞬間通過的電流是 250 安培。
1.3 單一電磁鐵線圈影響範圍
理論上一個電磁鐵線圈以電流激磁後,會在其周圍空間產生一個與距離平方 成反比的磁場,但為了分析的方便及降低模型建構時的複雜度,以電磁模擬軟體 模擬電磁鐵線圈電流激磁後其周圍空間的磁場,探討一個電磁鐵線圈的有效影響 範圍。 在 5×5 個電磁鐵線圈所組成的平台範圍中,原點位置在中間電磁鐵線圈的 中心,模擬僅對中間的電磁鐵線圈激磁,激磁的電流為N×I =250A,並擷取座 標 (-50,0,12) 至 (50,0,12) 縱 向 及 徑 向 的 磁 場 強 度 ( H ) 。圖 1.2 模擬單一電磁鐵線圈影響範圍時擷取的座標範圍 在縱向磁場強度方面:結果如圖 1.3 所示,座標(-50,0,12)至(-30,0,12) 的磁場強度均方值為 50.2 m A ,座標(30,0,12)至(50,0,12)的磁場強度均方值為 50.4 m A ,相對於電磁鐵線圈所在位置(-10,0,12)至(10,0,12)的磁場強度均方 值 5139.2 m A 已不到百分之一。
單一線圈縱向影響範圍
-1000 0 1000 2000 3000 4000 5000 6000 7000 8000 -50 0 12 -45 0 12 -40 0 12 -35 0 12 -30 0 12 -25 0 12 -20 0 12 -15 0 12 -10 0 12 -5 0 1 2 0 0 12 5 0 12 10 0 12 15 0 12 20 0 12 25 0 12 30 0 12 35 0 12 40 0 12 45 0 12 50 0 12 (X,Y,Z) A/ m 圖 1.3 單一線圈縱向影響範圍 在徑向磁場強度方面:結果如圖 1.4,所示座標(-50,0,12)至(-30,0,12)的 磁場強度均方值為 29.4 m A ,座標(30,0,12)至(50,0,12)的磁場強度均方值為 30.2 m A ,相對於電磁鐵線圈所在位置(-10,0,12)至(10,0,12)的磁場強度均方 值 3080.3 m A 已不到百分之一。單一線圈徑向影影範圍 -5000 -4000 -3000 -2000 -1000 0 1000 2000 3000 4000 5000 -50 0 12 -45 0 12 -40 0 12 -35 0 12 -30 0 12 -25 0 12 -20 0 12 -15 0 12 -10 0 12 -5 0 12 0 0 12 5 0 12 10 0 12 15 0 12 20 0 12 25 0 12 30 0 12 35 0 12 40 0 12 45 0 12 50 0 12 (X,Y,Z) A/ m 圖 1.4 單一線縱向圈影響範圍 在工程上,這麼小的影響已可忽略不計,這樣可以方便在模型建構時僅在 3×3 的電磁鐵線圈範圍中,討論單一電磁鐵線圈周圍的磁場強度,在模型建構時 若永久磁鐵位置超過這個範圍,則電磁鐵線圈對此永久磁鐵的影響將被忽略。
1.4 電磁鐵線圈加成性的討論
根據電磁學理論,磁場強度具有加成性,但互感的影響卻是不能不考慮的部 分,為驗證加成性及了解電磁鐵線圈互感的影響程度,以 Ansoft 電磁模擬軟體 模擬圖 1.5 三組電磁鐵線圈,第一組將兩個緊鄰電磁鐵線圈同時激磁,第二組僅 激磁左電磁鐵線圈,第三組僅激磁右電磁鐵線圈。激磁的電流為N×I =250A。 圖 1.5 驗證電磁鐵線圈加成性的三組電磁鐵線圈 圖 1.6 中,“Hz_left”與“Hz_right”分別表示僅激磁左電磁鐵線圈與僅 激磁右電磁鐵線圈兩組模擬時,座標(-30,0,12)至(30,0,12)的磁場強度(H)變 化。 圖 1.7 中,“Hx_left”與“Hx_right”分別表示僅激磁左電磁鐵線圈與僅 激磁右電磁鐵線圈兩組模擬時,座標(-30,0,12)至(30,0,12)的磁場強度(H)變 化。左右線圈縱向磁場強度 -1000 0 1000 2000 3000 4000 5000 6000 7000 8000 -30 0 12 -27 0 12 -24 0 12 -21 0 12 -18 0 12 -15 0 12 -12 0 12 -9 0 12 -6 0 12 -3 0 12 0 0 12 3 0 12 6 0 12 9 0 1212 0 12 15 0 12 18 0 1221 0 1224 0 1227 0 1230 0 12 (X,Y,Z) A/m Hz_left Hz_right 圖 1.6 左電磁鐵線圈及右電磁鐵線圈縱向磁場強度 左右線圈徑向磁場強度 -5000 -4000 -3000 -2000 -1000 0 1000 2000 3000 4000 5000 -30 0 12 -27 0 12 -24 0 12 -21 0 12 -18 0 12 -15 0 12 -12 0 12 -9 0 12 -6 0 12 -3 0 12 0 0 12 3 0 12 6 0 12 9 0 1212 0 1215 0 1218 0 12 21 0 12 24 0 12 27 0 1230 0 12 (X,Y,Z) A/ m Hx_left Hx_right 圖 1.7 左電磁鐵線圈及右電磁鐵線圈徑向磁場強度 圖 1.8 中,Hz_Two 表示兩個電磁鐵線圈都有電流時,座標(-30,0,12)至 (30,0,12)的磁場強度(H)變化;Hz_Add 為第二模組擬及第三組模擬(Hz_left 與 Hz_right)在同座標的磁場變化直接加成的結果。圖 3.12 中,Hx_Two 表示兩 個電磁鐵線圈都有電流時,座標(-30,0,12)至(30,0,12)的磁場強度(H)變化; Hx_Add 為第二組模擬及第三組模擬(Hx_left 與 Hx_right)在同座標的磁場變化 直接加成的結果。
縱向磁場強度加成性比較圖 -1000 0 1000 2000 3000 4000 5000 6000 7000 8000 -30 0 12 -27 0 12 -24 0 12 -21 0 12 -18 0 12 -15 0 12 -12 0 12 -9 0 12 -6 0 12 -3 0 12 0 0 123 0 126 0 129 0 1212 0 1 2 15 0 1 2 18 0 1 2 21 0 1 2 24 0 1 2 27 0 1 2 30 0 1 2 (X,Y,Z) A/m Hz Hz_Add 圖 1.8 縱向磁場強度加成性比較圖 徑向磁場強度加成性比較圖 -5000 -4000 -3000 -2000 -1000 0 1000 2000 3000 4000 5000 -30 0 12 -27 0 12 -24 0 12 -21 0 12 -18 0 12 -15 0 12 -12 0 12 -9 0 12 -6 0 12 -3 0 12 0 0 12 3 0 12 6 0 12 9 0 12 12 0 12 15 0 12 18 0 12 21 0 12 24 0 12 27 0 12 30 0 12 (X,Y,Z) A/m Hx Hx_Add 圖 1.9 縱向磁場強度加成性比較圖 圖 1.8 與圖 1.9 中兩條曲線幾乎重合,由模擬結果得知,不論是縱向或徑向 的磁場強度,直接加成的結果均與模擬結果幾乎相同。所以我們可推論:平台中 的電磁鐵線圈具有非常明顯的加成性,且電磁鐵線圈因激磁電流而產生的磁場, 其磁場強度將遠大於電磁鐵線圈互感的影響,故電磁鐵線圈互感的影響幾乎可以 忽略。
1.5 磁路分析的討論
平台中 225 個電磁鐵線圈的交互行為相當的複雜,在模型建構時若一次考 慮平台中所有的電磁鐵線圈,會增加建構模擬平台時的困難,且模擬系統將非常 複雜。所以先探討平台中電磁鐵線圈的影響範圍、加成性關係,及尺寸的影響, 從這些基本的磁路分析,可以得知單一電磁鐵線圈在磁場中的磁場分布情形。由 單一電磁鐵線圈影響範圍的探討,可以將激磁後單一電磁鐵線圈的磁場範圍,僅 侷限在 3×3 的範圍,即前後左右各一個電磁鐵線圈的範圍,超過此範圍的磁場 強度將被忽略,這樣可以簡化永久磁鐵在平台中所受激磁電磁鐵線圈的影響;而 加成性的探討,可以確認互感在電磁鐵線圈激磁時的影響程度,以目前激磁電流 的強度而言,互感的影響幾乎可以忽略,所以再建構模擬平台時,可以計算出每 一個激磁電磁鐵線圈對永久磁鐵的影響後,再直接加成。 則平台中眾多電磁鐵線圈對永久磁鐵的影響,可以簡化為每一個 3×3 範圍 內的電磁鐵線圈對於永久磁鐵的磁場影響的加成和,如圖 1.10,只要考慮永久 磁鐵與平台內每一個電磁鐵線圈的相對位置,即永久磁鐵高度參數 z 與永久磁鐵 和每一個電磁鐵線圈中心的距離 r ,將超過 3×3 範圍的電磁鐵線圈的影響忽略, 就可以得到永久磁鐵所在位置每一個電磁鐵線圈所產生的磁場強度,經由基本電 磁學公式,可以得到永久磁鐵所受的力。而這些電磁鐵線圈的合力,將決定永久 磁鐵的運動行為。 圖 1.10 永久磁鐵與平台內電磁鐵線圈的相對位置 平台上的載具由非磁性材料所作成,故其運動全由在載具上的永久磁鐵所 推動,只要計算出每一個在載具上的永久磁鐵所受的力,載具的運動行為就由所 有永久磁鐵的合力所決定,則可以計算載具受電磁鐵線圈磁力影響後的移動行為 及轉動的情形。之後以曲線擬合的方式,建立一個可以準確描述激磁電磁鐵線圈 所產生的磁場的方程式,並建構出一套平台上的載具的動態模擬系統。最後關於 尺寸的討論,是為以後改進平台設計時的參考。2、 利用曲線擬合求電磁鐵線圈的模型:
2.1 模擬系統建立的原理
由磁路分析,得知激磁電磁鐵線圈所產生的磁場強度,只和永久磁鐵高度參 數 z 與永久磁鐵和電磁鐵線圈中心的距離 r 有關,且超過 3×3 範圍的電磁鐵線 圈的影響可以忽略。 以曲線擬合的方式,將 Ansoft 電磁模擬軟體的模擬結果,擬合為一個連續 的方程式,將徑向的磁場強度資料擬合為Hr(a,r,z),將縱向的磁場強度擬合為 ) , , (a r z Hz ,其中a為激磁電流大小,r 與電磁鐵線圈中心的距離,z 為高度參數。 則由(2-1)式至(2-5)式就可以得到在任何位置電磁鐵線圈所產生的磁場強度 x, y 及 z 方向的磁場強度, 2 2 y x r= + (2-1) ) , , ( ) , , , (a x y z H a r z Hr = r (2-2) 2 2 y x x z y x a H z y x a Hx r + × = ( , , , ) ) , , , ( (2-3) 2 2 y x y z y x a H z y x a Hy r + × = ( , , , ) ) , , , ( (2-4) ) , , ( ) , , , (a x y z H a r z Hz = z (2-5) 將所得的方程式經由基本電磁學公式: ∂ ∂ ⋅ + ∂ ∂ ⋅ + ∂ ∂ ⋅ = z x z y x y x x x x H m H m H m Fµ
0µ
0µ
0 (2-6) ∂ ∂ ⋅ + ∂ ∂ ⋅ + ∂ ∂ ⋅ = z y z y y y x y x y H m H m H m Fµ
0µ
0µ
0 (2-7) ∂ ∂ ⋅ + ∂ ∂ ⋅ + ∂ ∂ ⋅ = z z z y z y x z x z H m H m H m Fµ
0µ
0µ
0 (2-8)在 Matlab 計算之後可得到平台中永久磁鐵與電磁鐵線圈的在各方向的作用 力。載具的運動行為由所有永久磁鐵的合力所決定,則可以計算載具受電磁鐵線 圈磁力影響後的移動行為及轉動的情形。接下來根據基本力學公式,可以計算載 具在取樣時間內的運動情形,及取樣時間後載具新的位置及姿態,在根據載具新 的位置及姿態計算載具夏一個取樣時間後的位置及姿態,如此反覆運算的結果, 就可以達到載具在平台中的動態模擬。
2.2 以曲線擬合求電磁鐵線圈的模型:
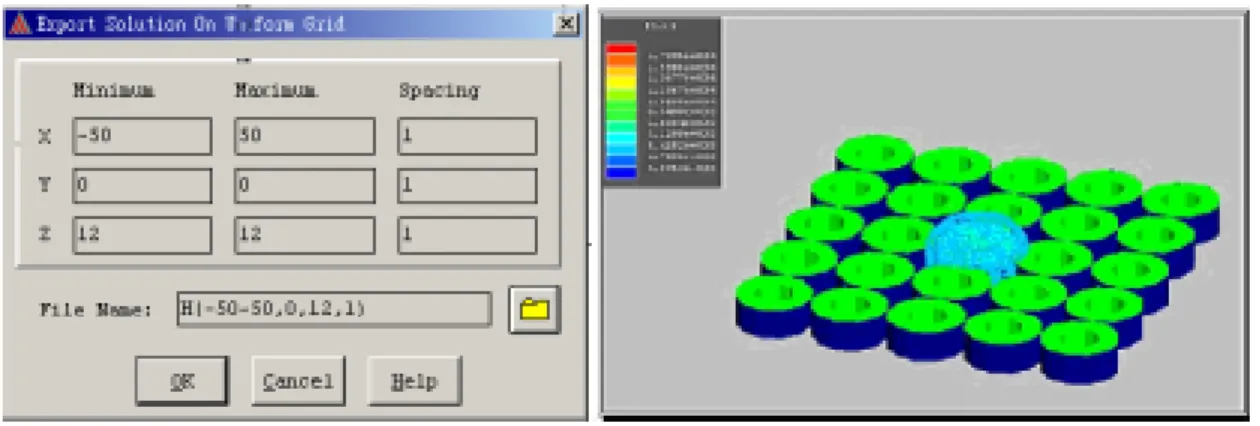
以 Ansoft 電磁模擬軟體,模擬電磁鐵線圈在激磁電流為 250A~300A 時所產 生的磁場,由於平台中電磁鐵線圈的高度為 10mm,擷取座標(-40,0,10.2)到座 標(40,0,18)的空間範圍的磁場強度,每 1mm 變化擷取一筆資料,包括徑向的磁 場強度(Hr)及縱向的磁場強度(Hz)。 圖 2.1 Ansoft 電磁模擬軟體擷取磁場強度資料 圖 2.2 Z=0.011m~0.015m(250A)徑向磁場強度資料-0.03 -0.02 -0.01 0.01 0.02 0.03 r
H
z=0.011 m 0.015 mL
2000 4000 6000 A□
m 圖 2.3 Z=0.011m~0.015m(250A)縱向磁場強度資料 資料的曲線擬合在很多數學或資料處理的輔助軟體都有這樣的功能,不同於 其他數學軟體,Mathmatica 軟體可由指定的基底作資料的曲線擬合。例如,可 以選用多項式函數(Polynomial Function)、三角函數(Trigonometric Function)、指數函數(Exponential Function),甚至是自訂的函數類型做為資 料的曲線擬合基底,這是本計畫在此採用 Mathmatica 軟體的主因。Mathmatica 的曲線擬合是採用最小平方法(Least Square)將資料數值與欲 擬合的函數作數學分析,而得的逼近曲線或最能表示出資料的趨勢的函數,所以 必然有誤差。為了建構精準的模擬系統,希望以不同的基底或資料擬合的方式, 將擬合出來的方程式與原始資料的誤差降到最低。故以(2-9)式定義原始資料與 擬合方程式的誤差,以擬合方程式與原始資料同一座標位置的函數值的均方誤 差,定義擬合方程式的準確度。 % 100 × 原始資料個數 原始資料平方和 原始資料個數 差平方和 原始資料與擬合結果誤 (2-9)
2.2.1 基因演算法簡介
根據 Ansoft 電磁模擬軟體資料,以 Mathnatica 軟體所擬合的方程式,與原 模擬得到的資料的誤差會因為基底的不同而產生程度不同的誤差,以致使模擬平 台與 Ansoft 電磁模擬軟體模擬結果的差距,模擬資料的準確性及基底的適當與 否,會決定曲線擬合出來的方程式與原來資料的誤差大小,例如使用多項式擬合 磁場強度的變化,與使用三角函數擬合的結果有相當大的差異。由於 Ansoft 電磁模擬軟體擷取磁場強度資料量非常大,難以使用傳統的最 佳化方式尋找最佳的基底。故本論文在此採用基因演算法,尋找與擬合資料誤差 最小的方程式基底,以使擬合的方程式能夠準確描述電磁鐵線圈附近的磁場強 度。
2.2.1 以基因演算法搜尋不同基底:
1. 徑向的磁場強度的擬合 徑向的磁場強度是奇函數,所以用正弦函數配合多項式函數擬合,以(2-10) 式所列的函數為基底擬合徑向磁場強度基底。為減少擬合結果與原始資料的誤 差,以基因演算法搜尋不同基底,根據所擬合出來的結果,得到誤差最小的方程 式。要尋找的參數為: 1. 基底的個數:隨著n增加,擬合的基底亦隨之增加。 2. 基底變異參數:隨著 k 值的變化,擬合的基底亦隨之改變。 其中 r 為與線圈中心的距離, z 為高度,a為激磁電流大小。 a k nr Sin a k r Sin a k r Sin a k r Sin a k r Sin a k r Sin a k r Sin a k r Sin a k r Sin z k nr Sin z k r Sin z k r Sin z k r Sin z k r Sin z k r Sin z k r Sin z k r Sin z k r Sin z k nr Sin z k r Sin z k r Sin z k r Sin z k r Sin z k r Sin z k r Sin z k r Sin z k r Sin k nr Sin k r Sin k r Sin k r Sin k r Sin k r Sin k r Sin k r Sin k r Sin z z z z z a a a r r r r r ⋅ ⋅ ⋅ ⋅ ⋅ ⋅ ⋅ ⋅ ⋅ ⋅ ⋅ ⋅ ⋅ ⋅ ⋅ ⋅ ⋅ ⋅ ⋅ ⋅ ⋅ ⋅ ⋅ ⋅ ⋅ ⋅ ⋅ π
π
π
π
π
π
π
π
π
π
π
π
π
π
π
π
π
π
π
π
π
π
π
π
π
π
π
π
π
π
π
π
π
π
π
π
,..., , , , , , , , ,..., , , , , , , , ,..., , , , , , , , ,..., , , , , , , , , , , , , , , , , , , , , , 8 7 6 5 4 3 2 8 7 6 5 4 3 2 8 7 6 5 4 3 2 8 7 6 5 4 3 2 1 2 2 2 2 2 2 2 2 2 5 4 3 2 3 2 5 4 3 2 (2-10)(2-11) 適應函數為每一組不同基底的均方誤差值,以菁英主義的方式選取誤差最小 的前 50%為新的母代,一共進行 15 代的演化。基因演算法的結果為:n=8 且 k=0.030284 時有最佳值。 (2-11)式為 Mathmatica 軟體以基因演算法的結果所擬合的徑向磁場強度方 程式,圖 2.4 及圖 2.5 是以(2-3)式所畫的徑向磁場強度的分布圖。 -0.02 0 0.02 r 0.012 0.014 0.016 z -5000 0 5000 A
□
m -0.02 0 0.02 r 圖 2.4 激磁 250A 徑向磁場強度-0.02
0
0.02
r
0.0120.0140.016
z
-5000
0
5000
A
□
m
-5000
0
5000
A
□
m
圖 2.5 激磁 250A 徑向磁場強度側視圖 -0.03 -0.02 -0.01 0.01 0.02 0.03 rH
z=0.011 m 0.015 mL
-6000 -4000 -2000 2000 4000 6000 A□
m 圖 2.6 激磁 250A 徑向磁場強度擬合情形 擬合的結果根據(2-9)式所定義的誤差為: % . % 223 100 = × 原始資料個數 原始資料平方和 原始資料個數 差平方和 原始資料與擬合結果誤 2. 縱向的磁場強度的擬合 縱向的磁場強度是偶函數,所以用餘弦函數配合多項式函數擬合,以(2-12) 式所列的函數為基底擬合縱向磁場強度基底。為減少擬合結果與原始資料的誤 差,以相同的方法搜尋不同基底,根據所擬合出來的結果,得到誤差最小的方程 式。其中 r 為與線圈中心的距離, z 為高度,a為激磁電流大小。基底的個數的 最佳值為 n=8,基底變異參數的最佳值為 k=0.03089。a k nr Cos a k r Cos a k r Cos a k r Cos a k r Cos a k r Cos a k r Cos a k r Cos a k r Cos z k nr Cos z k r Cos z k r Cos z k r Cos z k r Cos z k r Cos z k r Cos z k r Cos z k r Cos z k nr Cos z k r Cos z k r Cos z k r Cos z k r Cos z k r Cos z k r Cos z k r Cos z k r Cos k nr Cos k r Cos k r Cos k r Cos k r Cos k r Cos k r Cos k r Cos k r Cos z z z z z a a a r r r r r ⋅ ⋅ ⋅ ⋅ ⋅ ⋅ ⋅ ⋅ ⋅ ⋅ ⋅ ⋅ ⋅ ⋅ ⋅ ⋅ ⋅ ⋅ ⋅ ⋅ ⋅ ⋅ ⋅ ⋅ ⋅ ⋅ ⋅
π
π
π
π
π
π
π
π
π
π
π
π
π
π
π
π
π
π
π
π
π
π
π
π
π
π
π
π
π
π
π
π
π
π
π
π
,..., , , , , , , , ,..., , , , , , , , ,..., , , , , , , , ,..., , , , , , , , , , , , , , , , , , , , , , 8 7 6 5 4 3 2 8 7 6 5 4 3 2 8 7 6 5 4 3 2 8 7 6 5 4 3 2 1 2 2 2 2 2 2 2 2 2 5 4 3 2 3 2 5 4 3 2 (2-12) (2-13)(2-13)式為 Mathmatica 軟體以基因演算法的結果所擬合的縱磁場強度方程 式,圖 2.7 及圖 2.8 是以(2-13)式所畫的徑向磁場強度的分布圖。 -0.02 0 0.02 r 0.012 0.014 0.016 z 0 2500 5000 7500 A
□
m -0.02 0 0.02 r 圖 2.7 激磁 250A 縱向磁場強度-0.02
0
0.02
r
0.012
0.014
0.016
z
0
2500
5000
7500
A
□
m
0
2500
5000
7500
A
□
m
圖 2.8 激磁 250A 縱向磁場強度側視圖-0.03 -0.02 -0.01 0.01 0.02 0.03 r
H
z=0.011 m 0.015 mL
2000 4000 6000 A□
m 圖 2.9 激磁 250A 縱向磁場強度擬合情形 擬合的結果根據(2-9)式所定義的誤差為: % . % 159 100 = × 原始資料個數 原始資料平方和 原始資料個數 差平方和 原始資料與擬合結果誤2.3 以多個磁偶極矩模擬一個永久磁鐵
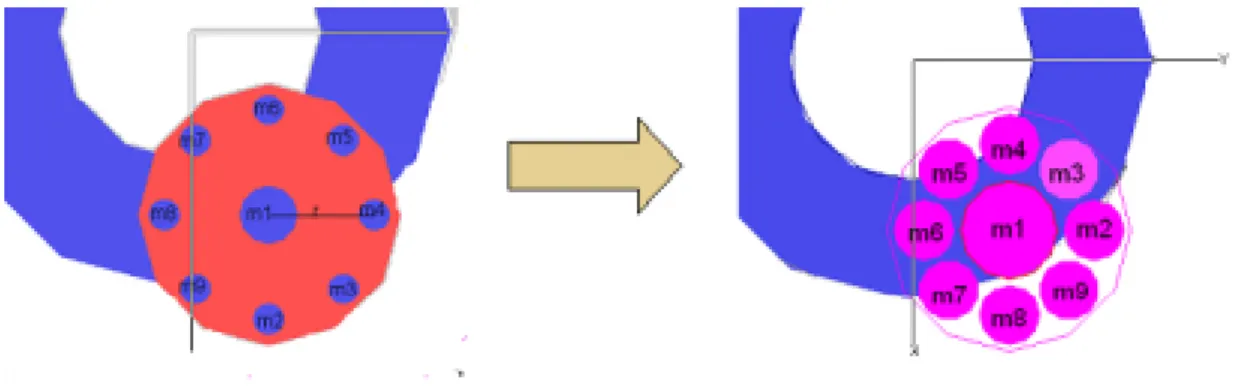
永久磁鐵是一個佔有空間的實體,若僅以 1 個磁偶極矩計算永久磁鐵的勞 倫茲力,會產生較多的誤差,因為平台中不同位置的磁場強度並不均勻,所以用 質點來代替整體的概念並不合適。故在建立模擬系統時,將一個永久磁鐵切為多 個磁偶極矩,計算其所受的力後,再與 Ansoft 電磁模擬軟體模擬永久磁鐵在不 同位置時所受之力相比較,比較其誤差。 將一個永久磁鐵如圖 2.10 切為 9 個磁偶極矩,以基因演算法找尋最佳的切 割的方式。m1 位於原來永久磁鐵的中心,m2 至 m9 平均分布於永久磁鐵周圍,m1 位於原來永久磁鐵的中心,所以應該仍決定永久磁鐵大部分的行為,基因演算法 找尋的第一個參數為 m1 的加權數 n,其次是找尋 m2 至 m9 距離中心最佳的距離 r, 如此才能真正描述一個佔有空間的永久磁鐵。圖 2.10 以 9 個磁偶極矩模擬一個永久磁鐵 適應函數就是和 Ansoft 電磁模擬軟體模擬得到的資料相比較後的誤差,且 採取精英主義的選取方法,選取前 50%為母代。經過基因演算法找尋的結果,得 到 n=3.3,r=4.6mm。
2.4 驗證作用力的準確性
為了驗證經過資料擬合所產生的方程式所計算出的力的準確性,以 Ansoft 電磁模擬軟體模擬一個與真實系統相同尺寸的永久磁鐵從位置 1mm 移動至 15mm 與電磁鐵線圈的作用力,每移動 1mm 模擬一次,如圖 2.11,並和擬合所產生的 方程式所計算的力比較。 圖 2.11 驗證永久磁鐵與電磁鐵線圈作用力的準確性 以基因演算法搜尋不同基底且以 9 個磁偶極矩模擬一個永久磁鐵修正以 後,結果如表 2.1 與表 2.2。模擬平台所計算出永久磁體所受的力,與 Ansoft 電磁模擬軟體模擬得到的資料的均方誤差大幅降低為 0.956%與 0.923%。這樣的誤差已經到了可以接受的範圍,在 Matlab 以曲線擬合所得到的方程 式,套入電磁學理論,可以得到永久磁鐵所受到的力,再套入基本運動學公式可 以得到永久磁鐵在固定時間的移動及轉動的行為,建立動態模擬系統。 以9個磁偶極矩模擬一個永久磁鐵 -0.02 0 0.02 0.04 0.06 0.08 0.1 0.12 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 cm nt Fx_Ansoft Fx_Matlab 誤差 圖 2.12 以 9 個磁偶極矩模擬一個永久磁鐵 x 軸方向的力 表 2.1 不同距離永久磁鐵 x 方向受力圖 距離(cm) Fx_Ansoft Fx_Matlab 誤差 1 0.022696 0.024 -0.001304 2 0.045709 0.0462 -0.000491 3 0.064293 0.0655 -0.001207 4 0.079596 0.0807 -0.001104 5 0.092502 0.09211 0.000392 6 0.097222 0.0973 -7.8E-05 7 0.098483 0.0984 8.3E-05 8 0.09129 0.0919 -0.00061 9 0.08407 0.0837 0.00037 10 0.074044 0.074 4.4E-05 11 0.06087 0.0603 0.00057 12 0.048098 0.0475 0.000598 13 0.036182 0.0364 -0.000218 14 0.025335 0.0248 0.000535 15 0.017226 0.0172 2.6E-05 均方值 0.068 0.00065 均方誤差 0.00065 / 0.068 * 100= 0.956%
以9個磁偶極矩模擬一個永久磁鐵 -0.05 0 0.05 0.1 0.15 0.2 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 cm nt Fz_Ansoft Fz_Matlab 誤差 圖 2.13 以 9 個磁偶極矩模擬一個永久磁鐵 z 軸方向的力 表 2.2 不同距離永久磁鐵 z 方向受力圖 距離(cm) Fz_Ansoft Fz_Matlab 誤差 1 0.18489 0.18493 -4E-05 2 0.17715 0.17704 0.00011 3 0.1574 0.155 0.0024 4 0.14347 0.1431 0.00037 5 0.11581 0.11355 0.00226 6 0.096288 0.09639 -0.0001 7 0.068772 0.06814 0.000632 8 0.045054 0.0451 -4.6E-05 9 0.022869 0.02255 0.000319 10 0.005243 0.00526 -1.7E-05 11 -0.00993 -0.00959 -0.00034 12 -0.01582 -0.0159 7.8E-05 13 -0.02165 -0.0218 0.000152 14 -0.02388 -0.02322 -0.00066 15 -0.02264 -0.02291 0.000275 均方值 0.0975 0.0009 均方誤差 0.0009 / 0.0975 * 100% = 0.923%
2.5 其他擬合方式的嘗試
在以基因演算法尋找基底前,曾經嘗試過的一些擬合方式,但後來都因為誤 差太大不符合要求而放棄。2.5.1 多項式函數擬合
以多項式函數擬合資料是最基本的做法,以高度參數 z 及距離參數 r 的n次 方項為基底,擬合 Ansoft 電磁模擬軟體得到的磁場強度資料,就成為最先嘗試 的方法。高度參數 z 使用至 8 次方,距離參數 r 使用至 5 次方,及其交乘項為基 底,如(2-14)所示: 5 4 4 4 3 4 2 4 4 5 3 4 3 3 3 2 3 3 5 2 4 2 3 2 2 2 2 5 4 3 2 5 4 3 2 8 7 6 5 4 3 2 , , , , , , , , , , , , , , , , , , , , , , , , , , , , , , , , , 1 z r z r z r z r z r z r z r z r z r z r z r z r z r z r z r rz rz rz rz rz r r r r r z z z z z z z z (2-14) (2-15)式為 Mathmatica 軟體以(2-14)所列出的多項式為基底所擬合的徑向 磁場強度方程式,圖 2.14 是以(2-15)式所畫的徑向磁場強度的分布圖。從圖 2.14 可以看出徑向磁場強度隨著高度的增加而遞減,且是一個以 r=0m 為對稱軸的奇 函數,正峰值約在 r=0.012m 處。隨著高度的增加而遞減的趨勢是正確的,但峰 值的座標與 Ansoft 電磁模擬軟體得到的磁場強度資料圖 2.2 有出入,擬合的結 果根據(2-9)式所定義的均方誤差公式計算以後,有高達 74%的誤差。 (2-15)-0.02 0 0.02 r 0.012 0.014 0.016 z -1000 0 1000 A
□
m -0.02 0 0.02 r 圖 2.14 激磁 250A 多項式函數擬合徑向磁場強度 -0.02 0 0.02 r 0.012 0.014 0.016 z -1000 0 1000 A□
m -1000 0 1000 A□
m 圖 2.15 激磁 250A 多項式函數擬合徑向磁場強度側視圖 (2-16)(2-16)式為 Mathmatica 軟體以(2-14)式所列出的多項式為基底所擬合的縱 向磁場強度方程式,圖 2.16 是以(2-16)式所畫的徑向磁場強度的分布圖。從圖 2.16 可以看出縱向磁場強度隨著高度的增加而遞減,且是一個以 r=0m 為對稱軸 的偶函數,正峰值在 r=0m 處。隨著高度的增加而遞減的趨勢是正確的,峰值的 座標與圖 2.3 亦相同,但擬合的結果根據(2-9)式所定義的均方誤差公式計算以 後,卻有高達 62%的誤差。 -0.02 0 0.02 r 0.012 0.014 0.016 z 0 2000 4000 A
□
m -0.02 0 0.02 r 圖 2.16 激磁 250A 多項式擬合縱向磁場強度 -0.02 0 0.02 r 0.012 0.014 0.016 z 0 2000 4000 A□
m 0 2000 4000 A□
m 圖 2.17 激磁 250A 多項式擬合縱向磁場強度側視圖由圖 2.18 與圖 2.19 可以看出多項式函數擬合徑向磁場強度擬合情形,資料 點與擬合的方程式雖然趨勢相同,但具有相當大的差距,不難理解均方誤差為何 如此高,故以(2-14)式為基底的資料擬合,並不成功。 圖 2.18 激磁 250A 多項式函數擬合徑向磁場強度擬合情形 -0.03 -0.02 -0.01 0.01 0.02 0.03 r
H
z=0.011 m 0.015 mL
2000 4000 6000 A□
m 圖 2.19 激磁 250A 多項式函數擬合縱向磁場強度擬合情形 以多項式擬合的結果,雖然結果已經稍微顯示出徑向的磁場強度及縱向的磁 場強度的分布趨勢,但與 Ansoft 電磁模擬軟體得到的磁場強度資料仍有相當大 的誤差,Hr(r,z)與Hz(r,z)有分別有高達 54%及 62%的誤差,這麼大的誤差根本 無法以(2-15)式及(2-16)式為基礎建構電磁鐵線圈的模型。 再者,以多項式函數為基底的擬合方式,通常當參數的n次方項愈大時,擬 合結果通常較逼近原始資料,但如此一來,當參數有些許變化時,會使整個函數 的函數值有很大的影響,做為一個須精密控制的系統的模型並不適合。再者,在 研究的過程中,亦曾反覆嘗試各種高度參數 z 及距離參數 r 的n次方項組合為基 底,均無法得到較小誤差的擬合結果,故多項式函數為基底的擬合方式,因為誤 差太大而放棄。3、 磁浮平台模擬系統之建構與模擬分析:
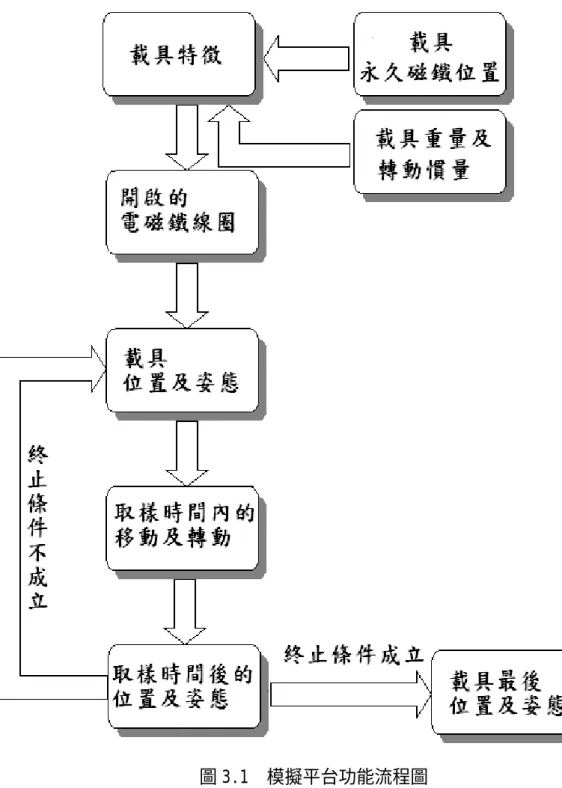
3.1 模擬平台功能
由以上之分析結果,可以準確計算永久磁鐵與電磁鐵線圈之間的作用力,在 Matlab 上建立模擬平台,目前有下列功能:
1.考慮載具上的永久磁鐵位置及載具的重量、轉動慣量。 2.依所輸入的初始條件計算載具所受到的 x、y、z 方向所受到的力與轉矩 (Torque)。 3.由所得之 x、y、z 方向所受到的力與轉矩,計算載具在單位時間內各方向 位移與轉動行為並計算載具新的位置及姿態。 4.由所得之新姿態計算載具在單位時間後的各個姿態。 5.程式會顯示出各個時間載具的中心位置及轉動的情形 6.程式繼續執行直到滿足終止條件。設定終止條件為載具的任一個角落碰觸 磁浮平台電磁鐵線圈,如果載具在平台中可以穩定上浮,就不應該發生和 平台電磁鐵線圈碰撞的情形,如圖 3.2 載具之一端碰撞平台,即視為載具 因為無法平衡於平台中而掉落。 圖 3.2 程式終止條件
3.2 磁浮平台之設計架構和模擬分析
3.2.1 最初載具設計的模擬結果 平台上的載具由非磁性材料所作成,故其運動全由在載具上的永久磁鐵所推 動,只要計算出每一個在載具上的永久磁鐵所受的力,載具的運動行為就由所有 永久磁鐵的合力所決定。現行的載具上的永久磁鐵位置如圖 3.3,當載具無任何 x 方向及 y 方向移動時,載具中心位於座標(10,10,13)。 圖 3.3 載具永久磁鐵位置為驗證載具的特性,以下針對載具有轉動偏移及移動偏移的情形時分別作 模擬,最後模擬載具同時轉動偏移及移動偏移的動態行為: 1.轉動偏移: 當載具在平台中,相對於 z 軸有順時針的轉動時,對載具進行動態模擬。初 使條件為載具在 x 及 y 方向均無任何移動,相對於 z 軸的轉動為 θz=10°, 如圖 3.4。 圖 3.4 載具順時針轉動模擬初始狀態 模擬的結果如表 3.1,載具順時針旋轉 32.26°後進入終止情形,即載具掉落 於平台上。其位置如圖 3.5。 表 3.1 載具順時針轉動模擬結果 Position(mm) Angle Time Initial Xd=10.00001 θx = 0° Yd=10.00001 θy = 0° zd =13 θz = 10° Result Xd=10.00001 θx = 0° 1.08sec yd=10.00001 θy = 0° zd =10 θz = 32.26° 圖 3.5 載具順時針轉動模擬結果
2.移動偏移: 當載具在平台中有+x 方向的移動時,對載具進行動態模擬。初使條件為載 具相對於 x 軸、y 軸及 z 軸的均無任何轉動,但載具中心向+x 方向移動 2mm,y 方向無移動。如圖 3.6。 圖 3.6 載具向+x 方向移動模擬初始狀態 模擬的結果如表 3.2,載具向+x 方向移動 10.2mm 後進入終止情形,即載具 掉落於平台上。其位置如圖 3.7。 表 3.2 載具向+x 方向移動模擬結果表 Position(mm) Angle Time Initial Xd=12 θx = 0° Yd=10 θy = 0° zd =13 θz = 0° Result Xd=22.2 θx = 0° 1.57sec yd=10 θy = 0° zd =10 θz = 0° 圖 3.7 載具向+x 方向移動模擬結果
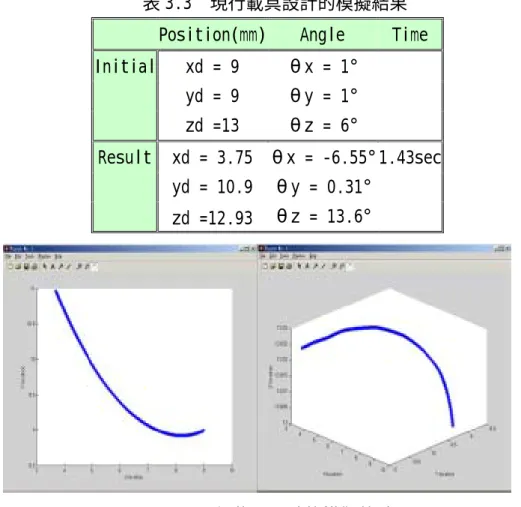
將載具的中心位置的(x,y,z)座標分別設為(12,12,13)、(10,12,13)、 (8,12,13)、(8,10,13)、(8,8,13)、(10,8,13)及(12,8,13),重新做以上的模擬, 得到圖 3.8 的結果,載具根據其初使位置,向外移動約 11mm 即大約一個電磁鐵 線圈的範圍後進入終止情形。 圖 3.8 載具順時針轉動模擬結果 3.同時具有移動偏移與轉動偏移: 載具的中心位置於座標(10,10,13),模擬開始時,給予 x 軸方向及 y 軸方向各-1mm 的偏移,給以 θx 及 θy 順時針方向 1 度的轉動,θz 順時針方向 6 度的轉動, 如圖 3.9。模擬結果顯示,在不加任何控制的情形下,載具會因為電磁鐵線圈的 作用力移動一段距離及偏轉後進入終止狀態,亦即掉落於平台上。結果如表 3.3,其軌跡如圖 3.10,姿態如圖 3.11 所示。 圖 3.9 載具上的永久磁鐵位置
表 3.3 現行載具設計的模擬結果 Position(mm) Angle Time Initial xd = 9 θx = 1° yd = 9 θy = 1° zd =13 θz = 6° Result xd = 3.75 θx = -6.55° 1.43sec yd = 10.9 θy = 0.31° zd =12.93 θz = 13.6° 圖 3.10 現行載具設計的模擬軌跡 圖 3.11 現行載具設計的模擬結果 從以上的模擬中發現,現行載具在不加任何控制的情形下,當載具有轉動或 任何方向的轉動時,不會有自然拉回的力。
3.2.2 載具無法自然穩定的因素 嘗試調整現行載具設計上的永久磁鐵位置,但仍然無法使載具穩定停留於 平台,所以現行載具設計在不加任何控制的情形下無法自然穩定。根據模擬的結 果,載具無法自然穩定有三個的因素: 1.線圈與線圈之間,存在磁力線向下區域: 圖 3.12 為以模擬系統所得到的單一永久磁鐵與電磁鐵線圈作用力軌跡,其 終止條件為 Fz(縱向作用力)小於零。由軌跡途中可見出,不管單一永久磁鐵的 初使位置為何,均會向徑向移動,直到距離電磁鐵線圈 11mm 位置時,Fz 開始小 於零。 圖 3.12 單一永久磁鐵與電磁鐵線圈作用力軌跡 再由 Ansoft 電磁模擬軟體模擬單一永久磁鐵從位置 1mm 到 15mm 與電磁鐵線 圈作用力的結果,也可以得到相同的結果。如圖 3.13。 Fz_Ansoft -0.05 0 0.05 0.1 0.15 0.2 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 cm nt Fz_Ansoft 圖 3.13 單一永久磁鐵從位置 1mm 到 15mm 與電磁鐵線圈作用力
根據以上的討論,得到以下結論,如圖 3.14 為平台的部分示意圖,圓圈的 範圍為磁力線向上的區域,在這區域電磁鐵線圈與永久磁鐵的作用力為斥力,隨 著與線圈中心的距離加大,斥力漸漸減少,到了圓圈外的區域的陰影區域,磁力 線開始向下,在這區域電磁鐵線圈與永久磁鐵的作用力由斥力轉為吸力,故載具 掉落。 圖 3.14 線圈與線圈之間磁力線向下區域 2.電磁鐵線圈無法提供對抗旋轉方向的力: 在平台中,電磁鐵線圈和永久磁鐵的作用力均為斥力,當電磁鐵線圈和永久 磁鐵並非完全對齊,而有位置的偏移時,斥力會將永久磁鐵向徑向推遠,故如圖 3.15 當平台逆時針方向有極小偏移時,每一個與永久磁鐵對應的電磁鐵線圈均 對載具產生逆時針方向的力矩,故整個載具將繼續往逆時針方向轉動,使偏差愈 來愈大直到永久磁鐵對應到磁力線向下區域,載具將因上浮力不夠而掉落。 圖 3.15 電磁鐵線圈無法提供對抗旋轉方向的力
3.電磁鐵線圈無法提供對抗移動方向的力: 如圖 3.16 當平台往+x 方向有極小偏移時,每一個與永久磁鐵對應的電磁鐵 線圈均應為斥力對載具產生+x 方向的力,故整個載具將繼續往+x 方向移動,使 偏差愈來愈大直到永久磁鐵對應到磁力線向下區域,載具將因上浮力不夠而掉 落。 圖 3.16 電磁鐵線圈無法提供對抗移動方向的力
3.3 建立穩定的磁浮平台載具
3.3.1 新型的載具設計架構(1) 新型載具最好是一個不加任何控制的情形下自然穩定的系統,以方便控制器 的設計。目前正根據所建構的模擬平台及 Ansoft 電磁模擬軟體的模擬結果,設 計新型載具。 目前嘗試的設計如圖 3.17,以 5*5 電磁鐵線圈範圍為主,中間八個電磁鐵 線圈激磁,並以一對 L 形的永久磁鐵互為抗衡。 圖 3.17 新的載具設計1.電磁鐵線圈提供對抗旋轉方向的力: 如圖 3.18 當載具逆時針方向有極小偏移時,較靠近電磁鐵線圈的永久磁鐵 會產生順時針方向的力矩,另一組較遠離電磁鐵線圈的永久磁鐵雖然也會產生逆 時針方向的力矩,但由於較遠離電磁鐵線圈,所以產生的順時針方向的力矩較 小,故整個載具將往順時針方向轉動,使偏差減小。 表 3.4 電磁鐵線圈提供對抗旋轉方向的力 Ansoft 模擬結果
Position
Angle
Initial
xd = 0 mm
θx = 0°
yd = 0 mm
θy = 0°
zd =13 mm
θz = 5°
Result
Torque = -0.006 N-m
圖 3.18 電磁鐵線圈提供對抗旋轉方向的力 2.電磁鐵線圈提供對抗移動方向的力: 如圖 3.19 當平台+x 方向有極小偏移時,較靠近電磁鐵線圈的永久磁鐵會產 生-x 方向的力,另一組較遠離電磁鐵線圈的永久磁鐵雖然也會產生+x 方向的 力,但由於較遠離電磁鐵線圈,所以產生的+x 方向的力較小,故整個載具將往 -x 方向移動,使偏差減小。 表 3.5 電磁鐵線圈提供對抗移動方向的力 Ansoft 模擬結果Position
Angle
Initial
xd = 3 mm
θx = 0°
yd = 0 mm
θy = 0°
zd =13 mm
θz = 0°
Result
Force of X = -0.05 Nt
圖 3.19 電磁鐵線圈提供對抗移動方向的力 3. 新型載具移動和轉動的結果分析 (1)當載具逆時針旋轉時,平台上的線圈會提供對抗旋轉方向的轉矩。 (2)當載具往+x 方向移動時,平台上的線圈會提供對抗移動方向的力。 (3)當載具移動時,y 方向受力不對稱,造成有轉動行為的發生,所以載具平 台的改良設計是去規劃一個 xy 方向都對稱的載具。 3.3.2 新型的載具設計架構(2) 改良設計如圖 3.20,以 5*5 電磁鐵線圈範圍為主,中間八個電磁鐵線圈激 磁,並以 4 組 L 形的永久磁鐵互為抗衡。接著我們根據改良後的載具設計去執行 動態模擬程式(初始設定:載具重量=0.07kg、電流激磁 250A、載具中心位置 =(0,0,13)),觀察這樣的載具設計是否有更穩定的效果。 圖 3.20 xy 方向都對稱的載具設計 1. 模擬結果分析(將載具+x 方向移動 3mm) 由圖 3.21 和圖 3.22 發現載具一開始在+x 方向有 3mm 的偏移但卻會有-x 方向的力將載具往平台中心點推回,也就是說這樣的載具平台配置可以在徑 向不平衡的情況下,產生自然拉回的力使載具往中心點平衡。由於 z 方向和
x 方向作用力的關係,電磁鐵線圈會對載具產生一個對 y 軸逆時針的轉矩, 加上載具的重力一開始便大於線圈所產生的磁力(斥),所以如圖 3.21 最後 載具經過 0.025 秒會翻轉摔落於平台。 圖 3.21 載具模擬結果姿態 0 5 10 15 20 25 2.85 2.9 2.95 3 Time (ms) X l o c a ti on ( m m ) 0 5 10 15 20 25 2.85 2.9 2.95 3 Time (ms) X l o c a ti on ( m m ) 圖 3.22 載具中心點 x 方向位置-時間圖 0 5 10 15 20 25 -0.04 -0.03 -0.02 -0.01 0 0.01 0.02 0.03 0.04 0.05 Time (ms) Fx (n t) 0 5 10 15 20 25 -0.04 -0.03 -0.02 -0.01 0 0.01 0.02 0.03 0.04 0.05 Time (ms) Fx (n t) 圖 3.23 載具 x 方向所受合力-時間圖
0 5 10 15 20 25 0.43 0.44 0.45 0.46 0.47 0.48 0.49 Time (ms) Fz (n t) 0 5 10 15 20 25 0.43 0.44 0.45 0.46 0.47 0.48 0.49 Time (ms) Fz (n t) 圖 3.24 載具 z 方向所受磁力-時間圖 0 5 10 15 20 25 11.8 12 12.2 12.4 12.6 12.8 13 Time (ms) Z l o c a ti on (m m ) 0 5 10 15 20 25 11.8 12 12.2 12.4 12.6 12.8 13 Time (ms) Z l o c a ti on (m m ) 圖 3.25 載具中心點 z 方向位置-時間圖 0 5 10 15 20 25 0 0.02 0.04 0.06 0.08 0.1 0.12 0.14 Time (ms)) Ty (n t-m ) 0 5 10 15 20 25 0 0.02 0.04 0.06 0.08 0.1 0.12 0.14 Time (ms)) Ty (n t-m ) 圖 3.26 平台對載具產生的 y 軸逆時針轉矩-時間圖 2. 模擬結果分析(將載具逆時針轉動 5 度) 由圖 3.27 和圖 3.28 發現載具一開始對 z 軸有逆時針 5 度的轉動但卻會 有順時針方向的轉矩將載具轉回 0 度,也就是說這樣的載具平台配置可以產 生自然拉回的轉矩使載具往 0 度平衡。由於載具 x 方向和 y 方向一開始是對 稱的,載具相對於載具中心為對稱體,所受 Fx 和 Fy 合力=0,載具只受 Fz 和 Tz 影響。電磁鐵線圈會對載具產生一個對 z 軸順時針的轉矩,加上隨著載 具對 z 軸順時針轉動,電磁鐵線圈對載具的磁力(斥)也愈來愈小如圖 3.30, 最後經過 0.06 秒載具直直摔落於平台上。
0 10 20 30 40 50 60 0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5 Time (ms) Zang (度 ) 0 10 20 30 40 50 60 0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5 Time (ms) Zang (度 ) 0 10 20 30 40 50 60 0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5 Time (ms) Zang (度 ) 圖 3.27 載具對 z 軸旋轉角度-時間圖 0 10 20 30 40 50 60 -9 -8 -7 -6 -5 -4 -3 -2 -1 0x 10 -3 Time (ms) Tz (n t-m ) 0 10 20 30 40 50 60 -9 -8 -7 -6 -5 -4 -3 -2 -1 0x 10 -3 Time (ms) Tz (n t-m ) 0 10 20 30 40 50 60 -9 -8 -7 -6 -5 -4 -3 -2 -1 0x 10 -3 Time (ms) Tz (n t-m ) 圖 3.28 線圈對載具產生對於 z 軸旋轉的轉矩-時間圖 0 10 20 30 40 50 60 9.5 10 10.5 11 11.5 12 12.5 13 Time (ms) Z lo ca tio n ( m m ) 0 10 20 30 40 50 60 9.5 10 10.5 11 11.5 12 12.5 13 Time (ms) Z lo ca tio n ( m m ) 0 10 20 30 40 50 60 9.5 10 10.5 11 11.5 12 12.5 13 Time (ms) Z lo ca tio n ( m m ) 圖 3.29 載具中心 z 方向位置-時間圖 0 10 20 30 40 50 60 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.5 0.55 0.6 0.65 Time (ms) Fz (n t) 0 10 20 30 40 50 60 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.5 0.55 0.6 0.65 Time (ms) Fz (n t) 0 10 20 30 40 50 60 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.5 0.55 0.6 0.65 Time (ms) Fz (n t) 圖 3.30 載具 z 方向所受磁力-時間圖
3. 新型載具與平台動態行為的比較分析 (1)當載具有+x 方向的偏移時,載具相對於 x 軸仍為對稱物體,所受 Fy 合力 =0,所以載具在 y 方向不會有運動,也不會有對 x 軸和對 z 軸的轉動發生。 (2)但載具受 Fx、Fz 影響產生 X 方向位移和 Z 方向位移,導致載具會對 y 軸做 偏轉,使得載具經過一段時間後翻轉而掉落於平台上。 (3) 根據其他的模擬測試發現當載具+x 方向偏移小於 3.7mm,所受的 Fx 為負 值,使得載具往平台中心點偏回去。 (4) 當載具對載具中心逆時針旋轉,載具相對於載具中心為對稱體,所受 Fx 和 Fy 合力=0,載具只受 Fz 和 Tz 影響。當載具逆時針旋轉時,所受的 Tz 為負值,使得載具順時針轉回去。當載具不偏轉也不移動時,載具僅受 Fz 和重力影響在某個高度範圍裡作上下移動的動作。
4、 磁浮平台模擬系統之載具運動控制:
我們將載具的設計改良成如圖 4.1 的十字型永久磁鐵,希望藉由 25 組電磁鐵線 圈控制器來控制載具能夠在 5*5 電磁鐵線圈範圍內中穩定上浮。 圖 4.1 現行載具平台配置圖 1.現行載具平台規格圖 如圖 4.2,載具重量=0.08kg、電磁鐵線圈外徑 20mm、內徑 10mm、高 10mm,十 字型載具長寬各 60mm、高 3mm,平台橘色部分的電磁鐵線圈開啟,初始激磁電流 =250A。圖 4.2 現行載具平台規格圖 2.控制載具穩定懸浮(1) 控制方法 : (1)判斷載具的邊角位置和磁偶極矩的(x,y)座標位置是否在該組電磁鐵線圈的 範圍內(x1~x2,y1~y2),if(x1<x<x2、y1<y<y2)成立代表載具上的永久磁鐵 進入到該組電磁鐵線圈的範圍內,便將該組電磁鐵線圈開啟,使載具跑到平 台任何位置皆有斥力使之上浮。 (2)並利用控制參數 kp 和進入該組電磁鐵線圈的磁偶極矩高度位置與平衡點高 度的誤差值來控制各組電磁鐵線圈的激磁電流(如 4-1 式和 4-2 式),希望藉 由感測器感測出的高度位置差來做激磁電流控制(對於電磁鐵線圈的激磁電 流大小,是考慮電磁鐵線圈繞線匝數( N )與激磁電流強度( I )的乘積,即表 示電磁鐵線圈繞線部分的截面積瞬間通過的電流大小。)。當磁偶極矩高度低 於平衡點高度則加強電磁鐵線圈的激磁電流,使磁場強度增強,以提供進入該 電磁鐵線圈範圍內載具上的磁偶極矩更大的磁力往平衡點高度推回去,使載 具不翻轉掉落於平台。 error=平衡點高度-載具上磁偶極矩高度 (4-1) 控制激磁電流=初始激磁電流(1+kp*error) (4-2) 初始參數設定: (1)將載具中心位置放置於 x=1mm、y=0mm、z=13mm (2)平台高度=10mm、載具重量=0.08kg、初始激磁電流=250A、平衡點高度=13mm (3)每個電磁鐵線圈控制器參數 kp=0.3 模擬結果:
0 2000 4000 6000 12 14 16 18 載具中心高度-時間圖 時間(sample time=0.01ms) 高度 (mm ) 0 2000 4000 6000 10 11 12 13 14 高度 (mm) 時間(sample time=0.01ms) 載具邊角位置1高度-時間圖 0 2000 4000 6000 10 15 20 25 30 高度 (mm) 時間(sample time=0.01ms) 載具邊角位置4高度-時間圖 -2 0 2 -1 0 1 12 14 16 18 X軸(mm) 載具中心運動軌跡圖 Y軸(mm) Z 軸 (mm) 0 2000 4000 6000 12 14 16 18 載具中心高度-時間圖 時間(sample time=0.01ms) 高度 (mm ) 0 2000 4000 6000 10 11 12 13 14 高度 (mm) 時間(sample time=0.01ms) 載具邊角位置1高度-時間圖 0 2000 4000 6000 10 15 20 25 30 高度 (mm) 時間(sample time=0.01ms) 載具邊角位置4高度-時間圖 -2 0 2 -1 0 1 12 14 16 18 X軸(mm) 0 2000 4000 6000 12 14 16 18 載具中心高度-時間圖 時間(sample time=0.01ms) 高度 (mm ) 0 2000 4000 6000 10 11 12 13 14 高度 (mm) 時間(sample time=0.01ms) 載具邊角位置1高度-時間圖 0 2000 4000 6000 10 15 20 25 30 高度 (mm) 時間(sample time=0.01ms) 載具邊角位置4高度-時間圖 -2 0 2 -1 0 1 12 14 16 18 X軸(mm) 載具中心運動軌跡圖 Y軸(mm) Z 軸 (mm) 圖 4.3 載具邊角高度-時間變化圖 0 1000 2000 3000 4000 5000 6000 -1 -0.8 -0.6 -0.4 -0.2 0 0.2 0.4 時間(sample time=0.01ms) 轉矩 (n t-m m ) 0 1000 2000 3000 4000 5000 6000 0 5 10 15 20 25 30 35 Z方向所受磁力-時間圖 磁力 (n t) 時間(sample time=0.01ms) 0 1000 2000 3000 4000 5000 6000 -1 -0.8 -0.6 -0.4 -0.2 0 0.2 0.4 時間(sample time=0.01ms) 轉矩 (n t-m m ) 0 1000 2000 3000 4000 5000 6000 -1 -0.8 -0.6 -0.4 -0.2 0 0.2 0.4 時間(sample time=0.01ms) 轉矩 (n t-m m ) 0 1000 2000 3000 4000 5000 6000 0 5 10 15 20 25 30 35 Z方向所受磁力-時間圖 磁力 (n t) 時間(sample time=0.01ms) 0 1000 2000 3000 4000 5000 6000 0 5 10 15 20 25 30 35 Z方向所受磁力-時間圖 磁力 (n t) 時間(sample time=0.01ms) 圖 4.4 y 軸轉矩-時間變化圖 圖 4.5 z 方向所受磁力-時間變化圖 由模擬圖 4.3 可以發現載具在一開始的 0.04 秒還能穩定地將載具高度控制在 13mm 上下,且因為載具初始設定為一個 xy 方向都對稱的物體,所以在只有 x 方 向偏移的情況,y 方向合力和位移都為 0,y 方向不會有運動發生。並從圖 4.4 和圖 4.5 發現一開始的 0.04 秒也都能將電磁鐵線圈對載具的轉矩控制在 0(nt-m) 上下使載具不會翻轉,並且能控制電磁鐵線圈的磁力和重力抵消使載具高度維持
在 13mm,但 0.04 秒以後載具即失去控制,突然產生極大的斥力和對 y 軸順時針 轉矩使載具翻轉掉落於平台,而無法使載具平穩的懸浮在磁浮平台上。所以我們 希望能從調整控制參數 kp 和載具下方電磁鐵線圈控制器的控制機制,以使得載 具能夠穩定懸浮在磁浮平台上。 3.控制載具穩定懸浮(2) 控制方法 : (1)跟之前的控制方法(1)一樣,當載具上的永久磁鐵和邊腳位置進入到該電磁鐵 線圈的範圍內,便將該組電磁鐵線圈打開,使載具跑到平台任何位置皆有斥 力使之上浮。 (2)並利用 kp 參數和載具邊腳高度位置與平衡點高度的誤差值控制每個電磁鐵 線圈的激磁電流,使載具不翻轉掉落於平台。其中電磁鐵線圈控制器 5,11(kp 設為 10)其餘控制器(kp 設為 1),目的在於加強前後端控制器的控制力,以 期望能在載具前後端快掉落於平台時,以倍增的電流提供足夠的斥力將載具 推上去,而載具翹起來的另依端下方的控制器則以倍減的電流使那塊區域的 斥力降低,以克服轉矩,解決載具翻轉的情況。 error=平衡點高度-載具磁偶極矩高度 控制激磁電流=初始激磁電流(1+kp*error) 初始參數設定: (1)將載具中心位置放置於 x=1mm、y=0mm、z=13mm (2)平台高度=10mm、載具重量=0.08kg、初始激磁電流=250A、平衡點高度=13mm 模擬結果: -20 0 20 40 60 80 -5 0 5 10 15 x 10-14 -600 -400 -200 0 200 X軸(mm) 載具中心運動軌跡 Y軸(mm) x 軸 (m m ) -20 0 20 40 60 80 -5 0 5 10 15 x 10-14 -600 -400 -200 0 200 X軸(mm) 載具中心運動軌跡 Y軸(mm) x 軸 (m m ) 圖 4.6 載具中心運動軌跡-時間變化圖
0.5 1 1.5 2 2.5 3 3.5 4 4.5 5 5.5 x 104 -4 -2 0 2 4 6 8 X方向位移-時間圖 時間(sample time=0.1ms) X 方 向位移 (mm ) 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5 5.5 x 104 -4 -2 0 2 4 6 8 X方向位移-時間圖 時間(sample time=0.1ms) X 方 向位移 (mm ) 圖 4.7 x 方向位置-時間變化圖 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5 5.5 x 104 -1 -0.8 -0.6 -0.4 -0.2 0 0.2 0.4 0.6 0.8 時間(sample time=0.1ms) Xx 方向 合力 (n t) ?? ??( nt ) X方向合力-時間 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5 5.5 x 104 -1 -0.8 -0.6 -0.4 -0.2 0 0.2 0.4 0.6 0.8 時間(sample time=0.1ms) Xx 方向 合力 (n t) ?? ??( nt ) X方向合力-時間 圖 4.8 x 方向合力-時間變化圖 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5 5.5 x 104 -0.5 -0.4 -0.3 -0.2 -0.1 0 0.1 0.2 0.3 0.4 時間g6(sample time=0.1ms) X 方向 速度 (m /s )x ?? ??( m/ s ) X方向速度-時間圖 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5 5.5 x 104 -0.5 -0.4 -0.3 -0.2 -0.1 0 0.1 0.2 0.3 0.4 時間g6(sample time=0.1ms) X 方向 速度 (m /s )x ?? ??( m/ s ) X方向速度-時間圖 圖 4.9 x 方向速度-時間變化圖
0.5 1 1.5 2 2.5 3 3.5 4 4.5 5 5.5 x 104 9.5 10 10.5 11 11.5 12 12.5 13 13.5 14 14.5 Z 方 向高度 (m m ) 時間(sample time=0.1ms) Z方向高度-時間 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5 5.5 x 104 9.5 10 10.5 11 11.5 12 12.5 13 13.5 14 14.5 Z 方 向高度 (m m ) 時間(sample time=0.1ms) Z方向高度-時間 圖 4.10 z 方向高度-時間變化圖 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5 x 104 -300 -250 -200 -150 -100 -50 0 50 100 150 Z 方向合 力 (nt ) 時間(sample time=0.1ms) Z方向合力-時間圖 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5 x 104 -300 -250 -200 -150 -100 -50 0 50 100 150 Z 方向合 力 (nt ) 時間(sample time=0.1ms) Z方向合力-時間圖 圖 4.11 z 方向合力-時間變化圖 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5 5.5 x 104 -2.5 -2 -1.5 -1 -0.5 0 0.5 1 1.5 Y 方向轉 角 (度 ) 時間(sample time=0.1ms) Y方向轉角-時間圖 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5 5.5 x 104 -2.5 -2 -1.5 -1 -0.5 0 0.5 1 1.5 Y 方向轉 角 (度 ) 時間(sample time=0.1ms) Y方向轉角-時間圖 圖 4.12 y 軸轉角-時間變化圖
由模擬結果圖可以發現載具經過 0.5 秒後才會翻轉掉落於平台,已經能使載 具在磁浮平台上懸浮的時間提升。從模擬結果圖可以發現載具在一開始的 0.4 秒還能穩定地將載具高度控制在 13mm 上下,且因為載具初始設定為一個 xy 方向 都對稱的物體,所以在只有 x 方向偏移的情況,y 方向合力和位移都為 0,y 方 向不會有運動發生,至於 x 方向的運動情況則如圖 4.7,載具會被控制在 x 方向 上前後移動。由圖 4.12 和載具中心軌跡圖亦可以發現載具一開始都能夠維持在 轉角(對 y 軸)正負 1 度作小角度的震盪,代表已能克服載具翻轉掉落之旋轉力 矩,但在 0.4 秒之後控制無法 stable,因為愈到後面速度和受力的變化率愈大(如 圖 4.8、4.9、4.11),控制頻率也愈快,控制力也愈來愈大,最後造成崩潰(如 圖 4.7、4.10、4.12),使載具翻轉掉落於平台。 4.控制載具穩定上浮(3) 改良控制: 為了解決愈到後面控制頻率愈快(因為速度和受力的變化率愈來愈大),最後造成 崩潰,所以在先前的控制方法(1)(2)外加入緩衝控制:12.5mm<載具高度<14mm 時 不做控制(激磁電流維持 250A),希望使得控制頻率變小,最後使控制能夠達到 stable。 error=平衡點高度-載具磁偶極矩高度 控制激磁電流=初始激磁電流(1+kp*error) 初始參數設定: (1)將載具中心位置放置於 x=1mm、y=0mm、z=13mm (2)平台高度=10mm、載具重量=0.08kg、初始激磁電流=250A、平衡點高度=13mm。 模擬結果: -5 0 5 -1 -0.5 0 0.5 1 12 12.2 12.4 12.6 12.8 13 13.2 13.4 13.6 x軸(mm) 載具中心運動軌跡圖 y軸(mm) z( m m ) 軸 圖 4.13 載具中心點運動軌跡-時間變化圖
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 x 105 -5 -4 -3 -2 -1 0 1 2 3 4 5 X方向位移-時間圖 X 方向位移 mm ) 時間(sample time=0.01ms) 0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 x 105 -5 -4 -3 -2 -1 0 1 2 3 4 5 X方向位移-時間圖 X 方向位移 mm ) 時間(sample time=0.01ms) 圖 4.14 x 方向位置-時間變化圖 0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 x 105 12 12.2 12.4 12.6 12.8 13 13.2 13.4 13.6 時間sample time=0.01ms) Z方向高度 (mm ) Z方向高度-時間圖 0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 x 105 12 12.2 12.4 12.6 12.8 13 13.2 13.4 13.6 時間sample time=0.01ms) Z方向高度 (mm ) Z方向高度-時間圖 圖 4.15 z 方向高度-時間變化圖 0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 x 105 -5 -4 -3 -2 -1 0 1 2 Y軸轉角-時間圖 Y 軸轉 角 (度 ) 時間(sample time=0.01ms) 0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 x 105 -5 -4 -3 -2 -1 0 1 2 Y軸轉角-時間圖 Y 軸轉 角 (度 ) 時間(sample time=0.01ms) 圖 4.16 對 y 軸轉角-時間變化圖