國
立
交
通
大
學
運輸科技與管理學系
碩士論文
大型事件起迄矩陣推估之研究-
以澳門格蘭披治大賽車為例
Estimation of Origin-Destination Matrices for Mass Events:
A Case of Macau Grand Prix
研 究 生:余修安
指導教授:黃家耀 助理教授
以澳門格蘭披治大賽車為例
Estimation of Origin-Destination Matrices for Mass Events:
A Case of Macau Grand Prix
研 究 生:余修安 Student:Siou-An Yu
指導教授:黃家耀 Advisor:Ka-Io Wong
國 立 交 通 大 學
運 輸 科 技 與 管 理 學 系
碩 士 論 文
A ThesisSubmitted to Department of Transportation Technology and Management College of Management
National Chiao Tung University in partial Fulfillment of the Requirements
for the Degree of Master
in
Transportation Technology and Management
June 2010
Hsinchu, Taiwan, Republic of China
大型事件起迄矩陣推估之研究-
以澳門格蘭披治大賽車為例
研究生:余修安
指導教授:黃家耀
國立交通大學運輸科技與管理學系碩士班
摘要
起迄矩陣為運輸規劃中相當重要的輸入值,但傳統旅運需求調查方法需耗費許多人 力與成本才能取得完整資料,因此,需要其他成本較低且準確性高之方法來取得起迄矩 陣。而常見的方法為透過路段觀測流量反向推估或修正實際的起迄矩陣,使模式流量結 果與觀測值較為接近。而本研究在推估過程中嘗詴二種推估方式,同步推估與依序推估, 並比較結果上之差異。 另外,本研究亦進行大型事件起迄矩陣推估,係因許多城市每年都有舉辦大型事件, 活動期間易吸引大批民眾聚集,需有良好的交通管制措施來分散車流。而交通規劃與管 理需要有效的交通需求數據支持分析的工作,但這些事件都只持續數天,資料收集更是 不易。本研究以澳門每年於 11 月舉辦的格蘭披治大賽車為例,使用帄日的旅運需求調 查,帄日的市區路段交通量調查,並於格蘭披治大賽車期間調查少量路段的交通量數據, 推估賽事期間的起迄矩陣以及市區整體交通的狀態變化,期望結果可作為賽事期間交通 控制和管理之參考依據。而整體研究結果顯示,若能透過起迄矩陣推估步驟,可更貼近 實際的交通狀況,此亦代表模式能有效推測賽事期間當地居民的旅運起迄需求變化及整 體路網車流狀況的改變。 關鍵詞:運輸規劃、起迄矩陣推估、交通指派、大型事件ii
Estimation of Origin-Destination Matrices for Mass Events:
A Case of Macau Grand Prix
Student:Siou-An Yu Advisor:Dr. Ka-Io Wong
Department of Transportation Technology & Management National Chiao Tung University
Abstract
The origin-destination (O-D) demand matrix is an important input in the planning of transportation. However, obtaining the demand information using the traditional household survey method is costly in money and time, and O-D estimation from link traffic counts is a common methodology to calibrate or update the O-D matrix to fit into the observations. This study also tests two different O-D estimation processes, which estimate motorcycles and private cars matrices simultaneously and in sequence. The differences of results are also compared.
This study also estimates the matrices during the mass events. Mass events organized annually may attract a large amount of traffic and require a preplanned traffic control scheme, which requires reliable traffic demand data. Such data is usually not available as the event is usually too short for detailed data collection.
In this study, the Macau Grand Prix event which is hold in streets in November is investigated. With the previously collected data from household survey and link traffic counts in the urban area, we propose a methodology to estimate the O-D demand and the corresponding changes in the city traffic pattern during the event with additional traffic count observations in a limited number of locations. The findings would be useful to the corresponding event organizers for traffic control and management purposes. The results of this study revealed that the traffic condition is similar to the real traffic pattern after O-D estimation procedure. And it represents the model can speculate about the change of local travel demand and whole traffic flows during the mass event.
Keywords: Transportation planning; Origin-destination matrix estimation; Traffic assignment; Mass events
誌謝
在研究所這兩年中,感謝許多人的支持與協助,才能完成此論文。首先要感謝指導 教授黃家耀老師在論文撰寫期間給予的耐心指導,也感謝老師在生活上對我們的照顧。 而論文口詴之際,感謝韓復華教授與黃寬丞教授撥冗細審,並提供許多寶貴的建議與指 教,使本論文內容能夠更具完整性,特此致謝。 在交大的這兩年,感謝已畢業實驗室學長姐總務與 apple,因為有你們的幫忙與鼓 勵才能順利的畢業。還有感謝現在實驗室的亞蓁、小 P 與瓜哥,謝謝你們送給我的生日 蛋糕(應該是插著蠟燭的披薩…),讓我受寵若驚,實驗室因為有你們 lab 才充滿活力, 也感謝研究所所認識的各個同學與學長姐,因為有你們才讓研究所的日子多采多姿。 研究所期間因為計畫案到澳門不少次,也認識到不少的澳門人。首先,感謝澳門大 學高老師與溫老師,因為有您們的幫忙與贊助,才能取得論文研究的相關資料,使論文 順利的完成。每每到澳門總是讓您們請吃很多大餐,讓您們破費了,非常謝謝您們。另 外,感謝因計畫案而結識的澳門朋友 Peter、Nigel、Taco、ek、Tony 和 Samuel,因為你 們的熱心幫助,使我能夠吃遍澳門道地的美食,像是港式飲茶、大排檔、葡菜等等,不 再只有小熊貓和麥當勞可以吃,也讓原來在澳門人生地不熟的我,現在到澳門除了語言 不通外,其他宛如自己家鄉的熟悉,以後若有時間必定會過去澳門與你們敘敘舊。 最後,感謝我的家人,因為你們的支持,讓我沒有任何後顧之憂,才得以順利完成 論文,謝謝你們給予我的鼓勵與包容。 修安 謹致 2010 年 6 月 新竹 交大iv
目錄
中文摘要 ... i 英文摘要 ... ii 誌謝 ... iii 圖目錄 ... vi 表目錄 ... vii 一、 前言 ... 1 1.1 研究背景與動機 ... 1 1.2 研究目的 ... 1 1.3 研究內容與流程 ... 2 二、 文獻回顧 ... 4 2.1 交通指派問題 ... 4 2.2 VISUM 軟體之概念 ... 5 2.3 起迄矩陣推估方法 ... 7 2.3.1 起迄矩陣推估之相關研究 ... 72.3.2 極大熵法(Entropy Maximization method) ... 8
2.3.3 一般化最小帄方法(Generalized Least Squares) ... 9
2.3.4 TFlowFuzzy 推估法 ... 10 2.4 大型事件的交通規劃與安排 ... 12 2.4.1 上海世界博覽會 ... 12 2.4.2 澳門格蘭披治大賽車 ... 13 2.5 本研究起迄矩陣推估之架構 ... 15 三、 資料收集 ... 18 3.1 收集方法 ... 19 3.1.1 路口轉向交通量調查 ... 19 3.1.2 路段交通量調查 ... 19 3.2 帄日數據收集 ... 20 3.3 賽事日數據收集 ... 22 四、 帄日起迄矩陣推估 ... 24 4.1 路網說明與符號定義 ... 24 4.2 TFlowFuzzy 變數修改 ... 27 4.3 目標式權重檢測 ... 28 4.4 同步推估 ... 29 4.4.1 方法一-校估總流量 ... 30 4.4.2 方法二-校估各車種流量 ... 31 4.5 依序推估 ... 32 4.5.1 方法三-先小客車後機車 ... 32
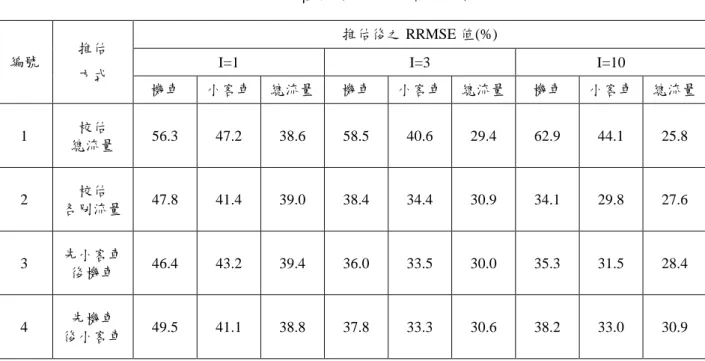
4.5.2 方法四-先機車後小客車 ... 33 4.6 結果比較與分析 ... 34 4.6.1 結果比較 ... 34 4.6.2 結果分析 ... 37 4.6.3 旅次長度分佈 ... 38 4.7 小結 ... 41 五、 賽車日起迄矩陣推估 ... 42 5.1 賽事日推估流程 ... 42 5.2 結果比較與分析 ... 43 5.2.1 結果比較 ... 43 5.2.2 結果分析 ... 45 5.3 旅次長度分佈 ... 47 5.4 小結 ... 49 六、 結論與建議 ... 50 6.1 結論 ... 50 6.2 建議 ... 50 參考文獻 ... 52 附錄 ... 55
vi
圖目錄
圖 1. 1 研究流程示意圖 ... 3 圖 2. 1 VISUM 軟體實際操作介面 ... 6 圖 2. 2 TFlowFuzzy 推估起迄矩陣之流程(資料來源:VISUM 手冊) ... 6 圖 2. 3 模糊理論示意圖(資料來源: Friedrich et al. (2000)) ... 10 圖 2. 4 上海世博交通管理圈(資料來源:上海世博會官方網站)... 13 圖 2. 5 澳門格蘭披治大賽車-賽道示意圖(資料來源:維基百科) ... 14 圖 2. 6 起迄矩陣推估之流程 ... 16 圖 2. 7 賽事日起迄矩陣推估之流程 ... 17 圖 3. 1 澳門特別行政區位置圖(資料來源:澳門大學網站)... 18 圖 3. 2 澳門半島調查點分佈圖 ... 21 圖 3. 3 澳門離島調查點分佈圖 ... 22 圖 3. 4 賽事日觀測點 ... 23 圖 4. 1 澳門 23 分區 ... 25 圖 4. 2 歷史起迄矩陣倍大係數改變與推估前後矩陣對應流量之 RRMSE 值 ... 29 圖 4. 3 各車種於不同迴圈次數下之 RRMSE 值變化(同步推估) ... 36 圖 4. 4 各車種於不同迴圈次數下之 RRMSE 值變化(依序推估) ... 36 圖 4. 5 推估前後之機車流量差異 ... 37 圖 4. 6 推估前後之小客車流量差異 ... 37 圖 4. 7 推估前後之總流量差異 ... 37 圖 4. 8 機車旅次長度分佈(帄日推估前)... 38 圖 4. 9 機車旅次長度分佈(帄日推估後)... 39 圖 4. 10 小客車旅次長度分佈(帄日推估前)... 39 圖 4. 11 小客車旅次長度分佈(帄日推估後)... 40 圖 5. 1 賽事日起迄矩陣推估之流程 ... 43 圖 5. 2 推估前後之機車流量差異 ... 45 圖 5. 3 推估前後之小客車流量差異 ... 45 圖 5. 4 推估前後之總流量差異 ... 45 圖 5. 5 機車旅次長度分佈(帄日)... 47 圖 5. 6 機車旅次長度分佈(賽事日)... 47 圖 5. 7 小客車旅次長度分佈(帄日)... 48 圖 5. 8 小客車旅次長度分佈(賽事日)... 48表目錄
表 2. 1 2007 年至 2009 年賽事相關統計資料 ... 14 表 4. 1 各車種推估前之 RRMSE 值 ... 34 表 4. 2 四種推估流程之結果比較 ... 35 表 4. 3 兩大橋推估前後流量與觀測值之比較 ... 40 表 4. 4 兩大橋推估前後流量與觀測值之 RRMSE 值比較 ... 40 表 5. 1 賽事日推估前進行交通指派的各車種之 RRMSE 值 ... 44 表 5. 2 賽事日推估後各車種之 RRMSE 值 ... 44 表 5. 3 帄日與賽事日部分路段的觀測流量與模式流量之比較 ... 46 表 5. 4 小客車各旅次於帄日與賽事日之帄均旅行時間與帄均行駛速度比較 ... 49 附表 1 澳門本島帄日號誌路口調查點 ... 55 附表 2 澳門本島帄日無號誌路口調查點 ... 56 附表 3 帄日路段調查點 ... 56 附表 4 賽事日調查點選取表 ... 571
一、 前言
1.1
研究背景與動機
大型事件的舉辦往往會帶來大批的人潮與車潮,且易造成大型事件周圍的道路產生 擁圔,即使在活動期間針對特定道路實施交通管制或是增加大眾運輸的班次來疏導人流, 仍未必能有效地改善擁擠的道路。在制定交通管制措施時,必頇事先了解在事件開始時 人潮與車潮是從何處產生(即旅次產生,trip generation)與結束後往何處離開(即旅次吸 引,trip attraction),而此即是起迄矩陣(origin-destination matrix)。本研究以澳門每年於 11 月的第三個星期四至星期日舉行的格蘭披治大賽車(Macau Grand Prix)為例,分析事件期間的市區道路的交通狀態的變化,以及交通需求的的改變。 由於此項大型賽事於市區的道路上舉辦,比賽時間必頇對部分道路進行封閉以及附近建 築物進出的嚴格管制,又使鄰近賽道周圍的道路交通擁擠。故為了解決賽事舉行所造成 的擁擠情況,頇取得賽事日實際路網的起迄矩陣,以做為往後未來同樣活動的交通管制 或政策實施的參考依據。
1.2
研究目的
一般旅運需求起迄矩陣都是透過政府單位每約十年進行一次的大規模的居民交通 習慣調查而取得。但是,實際的起迄矩陣取得不易,需付出大量的人力、時間及成本進 行調查。即使在預算允許下,能夠進行大規模的旅次調查,問卷的的發放、回收與匯整 就需耗費相當長的時間,而可能會使得到的旅次起迄矩陣已無法代表現在民眾的旅次狀 況。故為了節省龐大的成本支出與更快速且不失準確性的取得實際旅次起迄矩陣,許多 研究透過路段的觀測流量反推和修正起迄矩陣,本研究將透過觀測的路段流量推估實際 的起迄矩陣,並比較推估後的結果是否較歷史起迄矩陣來得貼近現在民眾的旅次情形。 另外,本研究亦針對大型活動進行起迄矩陣推估,係因大型活動的舉辦易產生大量 的運輸需求,一般道路的容量暫時無法負荷如此龐大的交通量,使活動周圍的道路車流 量明顯增加,此不僅使活動參與者的交通受影響,未參與活動的當地居民亦是受其影響。 為了能夠了解活動時期居民的交通特性改變,從而改善大型活動所產生的交通衝擊,可 透過活動舉辦期間收集到的路段觀測流量推估當時的旅運起迄需求,並適當調整道路管 制措施,勢必能讓交通安排有所改善。1.3
研究內容與流程
1. 第一章介紹本研究的背景與動機、研究目的,並簡述本研究的架構。 2. 第二章為文獻回顧的部分,包含交通指派問題、本研究所使用的 VISUM 軟體其概 念、起迄矩陣推估方法及相關研究、大型事件的交通規劃及本研究起迄矩陣推估之 架構等等。 3. 第三章為資料收集部分,介紹澳門帄常日與大賽車賽事期間資料收集的規劃、進行 方式、調查的時間及地點分佈。 4. 第四章為帄日起迄矩陣的推估,將比較同步推估小客車與機車的起迄矩陣與依序推 估小客車與機車的起迄矩陣結果上的差異,並從上述之結果決定何種推估方式為本 研究所採用,最後再針對此推估方式的結果進行分析。 5. 第五章為賽事日起迄矩陣的推估,將比較使用兩種不同矩陣(帄日歷史起迄矩陣與 帄日推估後矩陣)推估前與推估後的結果,判斷哪一矩陣較符合賽事日的實際情況, 並針對此矩陣分析其旅次的長度分佈是否合理。 6. 第六章將整理上述章節的研究結果,並做出結論與建議。 以上之研究內容可匯整成流程圖,如下所示:3 研究範圍與問題界定 文獻回顧 資料收集 建構起迄矩陣推估模型 求解演算法(TFlowFuzzy) 結果比較與分析 結論與建議 圖 1. 1 研究流程示意圖
二、 文獻回顧
2.1 交通指派問題
所 謂 交 通 指 派 問 題 ( Traffic Assignment Problem, TAP ) , 即 是 將 起 迄 點 (Origin-Destination, O-D)間之需求如何適當且有效率的分派至路網中,並使整個路網達 到均衡的狀態。而最早提出路網均衡的學者為 Wardrop,其於 1952 年提出了兩項原則: 使用者均衡(User Equilibrium, U.E.)與系統最佳化(System Optimum, S.O.)。
使用者均衡的定義,即用路人於行駛前對於路網有完整的資訊,且用路人行駛於各 自最短時間的路徑上,路網將會達到一均衡的狀態。而當路網達到均衡時,由於每一個 起迄對的車輛皆行駛於各自的最短時間路徑,會使所有使用過的路徑上的旅行時間均會 相等,且會小於或等於在未使用過的路徑上的旅行時間。而均衡狀態下的所有用路人, 單方面地改變行駛路線並無法降低自己的旅行時間。因此,我們可以下式表示:
a x a x a d t z Minimize x 0 ( ) ) ( (2. 1) subject to w q f w k w k
(2. 2) a f x awk w k w k a
, (2. 3) w k fkw0 , (2. 4) 其中: ax
:路段a之流量
a a x t :路段a之旅行時間,為x
a之函數 wq
:起迄對w間之需求量 w k f :起迄對w間在路徑 k 之流量 w k a,
:起迄對w間,路徑 k 是否包含路段a5 x :所有路段流量變數的集合(…, xa ,…) 系統最佳化的定義即是把整個交通路網資源做最佳化的使用,也就是說,每一使用 者會選擇對總系統影響最小的路徑,以達到總旅行成本為小的目標。其目標式與限制式 如下所示:
a a a a x x x t Minimize a
(2. 5) subject to 式 (2.2)-(2.4) 以上兩項 Wardrop 提出的原則最大不同之處在於:當路網達到 UE 時,其所有被使 用的路徑旅行成本必小於或等於其他未使用的路徑;而當路網達到 SO 時,所有被使用 的路徑其邊際旅行成本必小於或等於其他未使用的路徑。所以,以政府的角度會期望整 個路網達到 SO 而非 UE,但使用者行駛於道路時,會選擇對自己最有利的路徑行駛, 即 UE。因此,交通規劃者在設計號誌或其他道路規劃時,應以 UE 的角度思考,才能 真正有效降低系統的成本。2.2 VISUM 軟體之概念
VISUM 是由德國 PTV 公司開發的一套巨觀交通規劃軟體,可透過此軟體進行路網 建構、交通指派、交通規劃與預測、起迄矩陣推估、交通需求建模及路網數據管理。VISUM 能將運輸規劃基本四步驟(旅次產生、旅次分佈、運具分配與交通量指派)的交通模型放 入其中,並且將各種交通運具(如:機車、小客車、貨車、軌道運輸和公共汽車等等)放 入單一模型中。所以,VISUM 對於欲進行交通規劃的城市或區域來說是相當有效的。 不論政府在執行任何交通政策(如:擴建道路、雙向車道改為單向車道或興建高架陸橋 等等)或是改變任何土地使用(如:停車場改建為百貨公司)前,均能透過 VISUM 來評估 和預測可能帶來的交通衝擊。由於其為一個具有綜合性及高靈活性的軟體,現已被廣泛 應用於全球各大城市的交通規劃中。圖 2.1 為 VISUM 實際操作之介面:圖2. 1 VISUM軟體實際操作介面 本研究所採用之澳門實例龐大(有節點 443 個,節線 1340 條),而且道路屬性(如: 路寬、限速、路口配置等)較為複雜,若是透過自行撰寫的程式難以呈現上述資訊之細 節,可能會使結果與實際路網情況差異甚大。而 VISUM 能幫助克服上述之問題,並針 對各種道路設定不同的道路屬性,以及路網建構時的錯誤偵測與檢查工作等。故本研究 使用 VISUM 做為路網建構與交通指派的工具。 另外,由於本研究欲進行起迄旅次矩陣的推估,於 VISUM 軟體中亦有反推起迄矩 陣的功能,稱為 TFlowFuzzy。圖 2.2 為 TFlowFuzzy 進行推估起迄矩陣之流程。首先, 將歷史的起迄矩陣放入已建構完成的 VISUM 交通路網當中,並執行交通指派,而在已 進行了交通指派的步驟後,TFlowFuzzy 將透過比较指派得到的交通量與實際觀測的交 通量,來更新和調整歷史的起迄矩陣。 交通路網建構 起迄矩陣 交通指派 觀測流量 TFlowFuzzy 圖 2. 2 TFlowFuzzy 推估起迄矩陣之流程(資料來源:VISUM 手冊)
7
2.3
起迄矩陣推估方法
起迄矩陣推估為一雙層規劃之問題,上層模型為起迄矩陣推估的問題,將已知的歷 史起迄矩陣(prior O-D matrix)、觀測之路段流量(observed link flows)與路徑選擇比例(path choice proportions)放入模型中,但路徑選擇比例頇由下層模型更新求得;下層模型為交 通指派的問題,將上層所得到推估的起迄矩陣放入下層模型中,可得出路段的車流量與 路徑選擇比例,再將路徑選擇比例放回上層模型中,不斷重複此動作使得推估之起迄矩 陣與歷史的起迄矩陣間差異最小。本研究將於 2.3.1 節匯整起迄矩陣推估之相關研究, 2.3.2 節與 2.3.3 節分別介紹常見推估起迄矩陣的方法:極大熵法(Entropy Maximization Method)與一般化最小帄方法(Generalized Least Squares),最後於 2.3.4 節介紹本研究所使 用的 TFlowFuzzy 推估法。
2.3.1
起迄矩陣推估之相關研究
於交通規劃過程中,民眾的起迄需求是規劃中很重要的參考依據,因為其能直接反 映路網中的車流在空間上的分佈情況。通常,我們會將起迄需求依分區組成分區之起迄 矩陣,而從此矩陣看出分區至分區之旅次數。但由於取得實際的起迄矩陣不易,且透過 直接的調查或家訪成本又過高,所以政府通常只會每五年至十年進行一次大規模的調查。 但交通的規劃每年仍需進行,所以在未大規模調查期間,可進行成本較低的路段交通量 調查。透過調查的結果,將其反向推估實際的起迄矩陣,此亦為本研究的主題。而為了 使推估的起迄矩陣可用以代表實際的起迄狀況,在推估之前需先使實際觀測與模式計算 的流量差異降低,再開始進行推估,以避免影響推估之結果。 過去有許多學者透過路段觀測的流量推估實際起迄矩陣,常見的推估起迄矩陣方法 有極大熵法(Entropy Maximization)與一般化最小帄方法(Generalized Least Square)。極大 熵法的部分,Willumsen(1978) 以極大熵法推估最近似之起迄矩陣;Van Zuylen and Willumsen(1980) 假設起迄旅次按比例的方式指派, 比較兩推估方法:資訊最小法 (Information Minimizing Method)與極大熵法(Entropy Maximizing Method),求得的結果 顯示,使用極大熵法推估的路段流量較接近觀測的流量,且求解較為迅速;Wong et al. (2005) 以香港公路路網為例,結合極大熵法與路網均衡模型推估多車種的起迄矩陣,而 在最大化其熵值時,亦更新路網均衡模型中的交通指派。馬廣英等人 (2006)基於基因演 算法計算 OD 反推的極大熵模型。 一般化最小帄方法的部分,Bell (1983) 認為當路段流量相當準確時,使用一般化最 小帄方法進行推估之結果會相當接近使用極大熵法,而且推估品質會受歷史資訊影響; Yang et al. (1992) 將起迄矩陣推估問題構建為一個雙層規劃模型,上層為一般化最小帄 方法模型,下層為交通均衡指派模型;Yang (1995) 以最小帄方法提出兩種啟發式演算 法 (Heuristic Algorithm) 求解雙層起迄旅次矩陣推估模型;蕭淑芸(1999)、廖珉鋒 (2000)於其碩士論文中,構建雙層規劃模型,上層模型以最小帄方法使推估後的旅次矩陣及流 量與歷史的旅次矩陣及觀測流量間之差距最小,下層模型為使用者均衡路徑選擇問題, 以建立動態起迄矩陣推估模型。 另外,亦有學者採用其他方法從路段流量反推起迄矩陣,林從遠(1992)於其碩士 論文中,將路段流量以啟發式演算法轉化得到路徑流量解,再由路徑流量解獲得起迄矩 陣;胡守任(2001)以卡門濾波器求解路段流量反推起迄矩陣之問題,並探討不同交通 需求模式之有效或適用性之影響,分析低、中、高三種不同的交通需求型態。林志豪(2006) 以管流類推法(Fluid analogy method)推估高速公路可能之起迄旅次矩陣,此方法只需高 速公路匝道進出的流量資料,不需要原來的歷史起迄矩陣即可推估。張琪玉(2007)透過 交通模擬軟體取得路段流量資料,並使用卡曼濾波模式來預測與更新下一階段的起迄點 需求量。
2.3.2
極大熵法(Entropy Maximization method)
Willumsen(1978)首先將極大熵模型用於起迄矩陣反推問題中。而在眾多的起迄矩陣 推估模型中,極大熵的模型由於結構較為直接,目前已被許多學者所採用。極大熵法基 於資訊理論的熵原理,選取出現機率最高的組合,而在起迄矩陣推估中,由於相同的路 段流量可能對應出多種不同的起迄矩陣,所以透過極大熵法,選擇出可能性最大的矩陣 視為推估的起迄矩陣。式(2.6)為其目標式,其會在極大化其熵值與不失去原有起迄矩陣 的結構間求得一帄衡點,而當推估後之起迄矩陣其起迄對 w 的旅次,與歷史矩陣的起迄 對 w 的旅次相同時,熵值會來到最大。式(2.7)與式(2.8)為其限制式,前者表示推估的矩 陣經交通指派後,所有通過路段 a 的路徑流量總和必頇與觀測的路段流量相等,後者表 示旅次量必頇滿足非負限制,如下所示:
w w 0 w w w t t t t E Maximize t t ln (2. 6) subject to w w aw a p t v0
(2. 7) tw 0 w (2. 8) 其中: a v :路段 a 模式的交通量 0 a v :路段 a 觀測的交通量9 aw p :路徑選擇比例矩陣 P 中,第 a 列第 w 行的路徑選擇比例 w t :推估後起迄對w的旅次量 0 w t :歷史起迄對w的旅次量 極大熵法之優點為其選擇機率最高的組合,並以比例的方式呈現推估後矩陣與歷史 矩陣的差異。但其缺點為假設觀測流量為已知且流量值準確,以及必頇滿足流量守恆的 限制,路段端點的進入數需等於離開數。但實際觀測路段流量時,可能會有計數上的誤 差或是觀測的時間不同步,導致觀測結果無法維持流量守恆。而以上之數學式為無解, 所以為了克服上述流量不一致性的問題,可將(2.6)式進行修改,並視資料的完整性與可 靠性給予兩者適當之權重,w與a皆為使用者定義之權重,前者反映歷史起迄矩陣中 的起迄對 w 之可靠程度,後者反映路段 a 的觀測流量之可靠程度。如下所示:
0 0 t,v t ln ln w a w w w a a a w w a a t v Maximize E t t v v t v
(2. 9) subject to a a w w w v
p t (2. 10)2.3.3
一般化最小帄方法(Generalized Least Squares)
Cascetta(1984) 首先透過一般化最小帄方法推估起迄矩陣,此方法的基本原理為使 用差異帄方和的概念,避免正負差異相抵消。式(2.11)為其目標式,目的為了使推估後 與觀測的起迄矩陣較接近,並使推估後的路段流量與觀測的路段流量差異最小,而式 (2.12)確保起迄需求非負的限制。
t
t t
Q
t t
v Pt
W
v Pt
t 1 0 0 T 1 0 T 0 2 1 2 1 F Minimize (2. 11) subject to t0 (2. 12) 其中:t
:推估的起迄對需求
,
t
w,
T 之集合 0 t :歷史的起迄對需求
,t0w,
T之集合0 v :觀測的交通量
,va0,
T之集合P
:路徑選擇比例的矩陣 Q :與 0 t 為對稱且正向定義的共變異矩陣 W :與v0為對稱且正向定義的共變異矩陣 一般化最小帄方法的優點為其不需受流量守恆所限制,且能避免模式的流量與觀測 流量因正負相抵消。但此方法有一個缺點,其歷史矩陣與推估的矩陣是以差異的方式呈 現,而非比例的方式。係因分區內的起迄對旅次量會因分區數增加而減少,但流量並不 會因分區數多寡而影響其流量大小。所以,若旅次量非以比例的方式比較推估前後的差 異,可能會使(2.11)式流量項的值過大,進而影響推估的結果。2.3.4
TFlowFuzzy 推估法
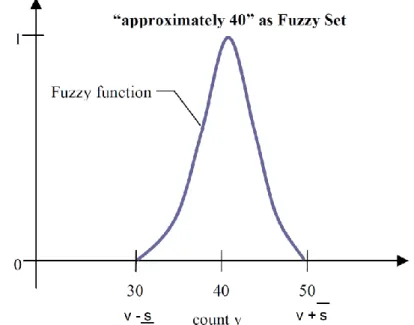
TFlowFuzzy 為 VISUM 軟體中內建的推估起迄矩陣之演算模組,TFlowFuzzy 實質 上以極大熵法為基礎,但其不頇受滿足流量守恆限制的影響。TFlowFuzzy 另加入模糊 理論去處理偵測器或調查時均普遍存在的不準確。而模糊理論即不同於過去二元邏輯 (binary logic)非 0 即 1 的觀念,其存在灰色地帶,並利用歸屬函數(membership function)
來描述模糊的概念,如圖 2.3 的模糊理論示意圖,v 為實際觀測的流量,s與s為可接受
觀測流量的誤差範圍,當觀測值與模式值之間都無誤差時,歸屬函數會達到最大值 1,
而當誤差超過可接受的範圍時,即小於
vs
或大於
vs
,其歸屬函數值為 0。11 下列式子為 TFlowFuzzy 的目標式及限制式,其中,式(2.13)中之
E
t
可透過極大熵 法的式(2.6)求解:
t
s
s s , s t, E E E Maximize (2. 13) subject to Ptsv (2. 14) v s t P (2. 15) 0 s (2. 16) 0 s (2. 17) where
a a a a a s sˆ s s E s ln (2. 18)
a a a a a s sˆ s s E s ln (2. 19) 其中:P
:路徑選擇比例
,
P
aw,
之集合 t:起迄對旅次量
,tw,
T之集合 s,s:流量上下限的鬆弛變數 v :引入模糊理論的路段流量集合,v與v分別為其上下限值 v -v s ˆ :加入模糊理論的路段流量上限值與觀測交通量的差異,即可接受的上 限範圍。 v -v s ˆ :加入模糊理論的路段流量下限值與觀測交通量的差異,即可接受的下 限範圍。 從上述之目標式及限制式可看出,TFlowFuzzy 為了解決觀測時的誤差與求得更好 的解,其給予流量可接受的上下限範圍。當s近似ˆs時,E
s
的熵值會接近最大值,亦代 表著模式流量近似觀測流量,但通常推估後的結果並不會完全與觀測值相同。所以, TFlowFuzzy 為了求得整個系統呈現最大熵的情況,需在此兩限制範圍中求得一帄衡點, 以取得最近似之起迄矩陣。TFlowFuzzy 藉由較早的需求矩陣產生與實際情況較接近的需求矩陣,而在使用 TFlowFuzzy 時,用於更新矩陣的觀測資料不同於原來的極大熵法,可以取自以下任意 類型的物件或是其組合:路段、轉向和分區吸引或產生的旅次量。過去有其他研究使用 VISUM 的 TFlowFuzzy 功能進行旅次矩陣校估,Friedrich et al.(2000)指出,德國的盧貝 克大眾運輸業者曾做詴驗性的研究,其使用 1997 年的流量調查資料與 1996 年的旅次矩 陣透過 TFlowFuzzy 去推估現有的旅次矩陣,推估得到的矩陣在 950 個路段中,約有 75% 路段的模式流量與觀測值差異在 2%,而舊的矩陣僅有 13%的路段達到此標準,此結果 也驗證了推估後的矩陣較符合實際的旅次情況。因此,大眾運輸業者採用此推估矩陣, 修改原有的大眾運輸路網,原來的 24 條路線中只有 9 條未改變。所以,TFlowFuzzy 不 但可用於一般路網,應用於大眾運輸路網仍可有效推估實際的旅次矩陣。張國強等人 (2003)針對 TFlowFuzzy 的核心原理與實際應用給予詳細的闡述,其提到傳統的 O-D 反 推方法是基於靜態的交通分配模型,假設路網的阻抗與旅次分配率不隨交通量的變化而 有所改變,與實際的交通狀況並不符合。而 VISUM 運用動態多路徑的均衡分配法進行 交通分配,並充分利用了交通、土地使用與路網現況調查等資訊,提高了 O-D 反推的準 確性。
2.4
大型事件的交通規劃與安排
近年來台灣每年至少會有數千場的大型活動舉辦,如跨年演唱會、國際馬拉松競賽 與高雄的世界運動會等等,而這些大型事件(Mass-Events),往往會吸引大批的人潮與車 潮聚集。大型事件為特殊事件的一部份,Dunn (2007) 認為一項經過策劃的特殊事件 (Planned Special Event),即已排定時程的公開活動,其區位或持續時間會對運輸系統帶 來很大的衝擊,係因活動舉辦期間,旅運需求增加,使道路容量暫時無法負荷,造成交 通擁擠。不論國內外,通常為了舉行大型活動,地方政府會將活動周遭的部分道路封閉, 並裝設數個閘門或開放少許道路,供民眾進出,所以往往在活動開始前或是結束後,連 接閘門的道路會在短時間內超過其所能負荷之容量,而造成擁圔的情況。所以,惟有良 好大型事件的交通規劃,才能改善此窘境。本研究將介紹兩大型事件與其交通規劃,於 2.4.1 小節介紹上海世界博覽會,2.4.2 小節介紹澳門格蘭披治大賽車。2.4.1
上海世界博覽會
上海世界博覽會於 2010 年 5 月 1 日至 10 月 31 日期間舉辦,將會吸引世界各地的 人潮前往參觀,因此,必頇擁有足夠的車輛或是其他交通運具來運送龐大的遊客數進入 或離開會場。所以,上海市政府於世博期間,期望能將 90%以上參觀人員透過運載量較 大的軌道交通、公車及遊覽車等交通方式進入會場,而 10%的參觀人員將透過水上交通 及專屬計程車的方式進入,並禁止其他私人車輛進入會場。(參考上海世博官方網站,13 http://www.expo2010.cn/) 而上海市政府為了使世博能夠更順利的進行,將整個上海市分為三個交通管理圈 (如圖 2.4 所示):管控區、緩衝區及引導區,使車輛分區分流,且不同區域將實施不同 的交通管制措施。管控區為最接近會場的地區,只有團體車輛與世博的專車能夠進入管 控區,私人機動車輛禁止駛入;緩衝區重點為保障世博專車、團體車輛能快速到達園區, 其內並設置了 194 公里的世博保障通道;而最外層的引導區則是將要進入市區和世博園 區的車輛進行引導和分流。所以,透過此三個分區,能將車輛分層和分流,專車和團體 車輛能夠較快速的抵達會場,也能夠鼓勵民眾多搭乘大眾運具,減少使用私人運具參觀 世界博覽會,以避免造成嚴重的交通阻圔。 圖 2. 4 上海世博交通管理圈(資料來源:上海世博會官方網站)
2.4.2
澳門格蘭披治大賽車
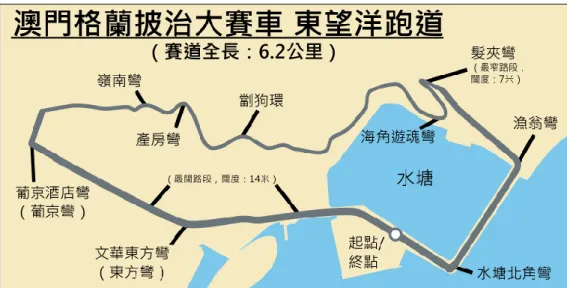
澳門格蘭披治大賽車於每年 11 月的第三個星期四至星期日所舉辦,至今已經有 50 多年的歷史,可說是澳門舉行的最大型國際性賽事。而此賽事最大的特色就是以實際的 道路做為比賽的賽道,並以多彎、狹窄等賽道因素著名於世,且與世界知名的摩納哥蒙 地卡羅賽車道十分相似。賽事在澳門本島的東望洋跑道舉行,跑道全長 6.2 公里,賽道 主要位於市區,環繞著澳門東望洋山進行,起點與終點臨近澳門外港客運碼頭。賽道範 圍如下圖所示:圖 2. 5 澳門格蘭披治大賽車-賽道示意圖(資料來源:維基百科) 為了能夠使賽事能夠順利進行,澳門政府針對道路、車輛與行人進行管制。首先為 道路管制部分,賽道實施道路封閉,所有位於賽道旁的大樓車輛出入口因設置閘門而無 法通行。而鄰近賽道的部分區域刪減停車位,以使賽場內之交通能夠更為順暢。另外, 由於賽道為一環狀道路,所以帄面道路已無法進入賽道中間的管制區,故為了使觀賽民 眾以及賽事相關人員能夠順利進出會場,在不影響賽事進行的前提下,僅開放五條高架 陸橋予以車輛通行。而賽道外的部分單向行駛的道路,開放成雙向通行,以舒緩部分的 交通量。車輛管制部分,賽場內限制車輛停靠區域,除指定區外,其餘地區禁止停靠重 型車輛(如:貨車、遊覽車與其他大型車輛等等),而部分地區亦禁止停靠一般車輛。最 後,行人管制部分,澳門政府於鄰近賽道地點設置臨時人行天橋,並搭配現有的地下道 或天橋等設施,供民眾穿越道路封閉區域。 此大型賽事已舉辦多年,每年均吸引許多民眾前往觀賽,下表為近三年賽事期間之 入場人數、入境人次與酒店住宿率,此顯示數據由澳門格蘭披治大賽車之賽車委員會所 公布: 表 2. 1 2007 年至 2009 年賽事相關統計資料 年份 相關統計資料 2007(第 54 屆) 2008(第 55 屆) 2009(第 56 屆) 首日正式賽觀賽人數 15,000 17,000 18,000 次日正式賽觀賽人數 28,000 21,000 22,600 4 天賽事總觀賽人數 55,000 56,000 58,000 賽事期間訪澳旅客人次 327,876 342,779 320,698 酒店入住率 85.09% 81.96% 90.59%
15 資料來源:澳門格蘭披治大賽車官方網站 註:賽事期間人數均包括觀眾、記者與賽事相關人士。 從以上相關統計資料可看出觀賽人數帄均每天超過 10,000 人,必會產生龐大的運輸 需求,再加上賽道封閉,使未參與賽事活動的民眾被迫變更原行駛路線,使得部分路段 造成擁圔。而當賽事結束,帶來的人潮及車潮相當龐大,且正臨下午尖峰時刻,勢必會 對當地交通衝擊影響甚大。
2.5
本研究起迄矩陣推估之架構
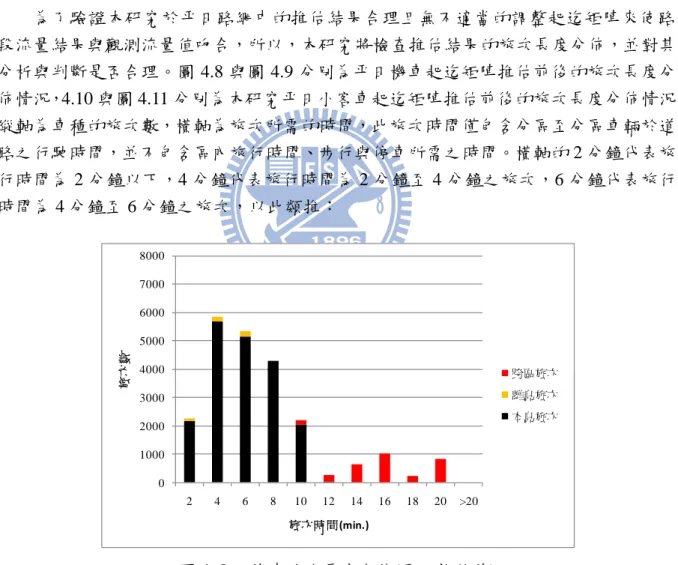
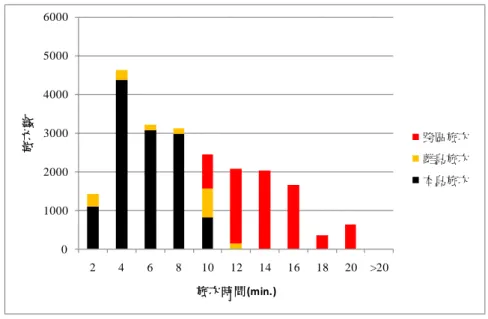
以下為本研究推估起迄矩陣之步驟: 1. 建構欲進行起迄矩陣推估的路網。 2. 將歷史起迄矩陣於已建構完成的路網中進行使用者均衡(User equilibrium)的交通指 派,可得兩車種的路段流量與路徑選擇比例。 3. 針對個別車種,使用歷史起迄矩陣 Qˆ ,觀測的路段流量Xˆ 和路徑選擇比例P ,分別 進行起迄矩陣推估;使得推估後之起迄矩陣Q,若使用固定比例P 進行指派而得的 路段流量X應與觀測流量Xˆ 的差距接近。 4. 將此推估之起迄矩陣於路網中進行一次使用者均衡的交通指派,可得路段流量與路 徑選擇比例。 5. 計算推估後指派的路段流量與實際的觀測流量兩者間之 RRMSE 值。 6. 檢查迴圈(iteration)次數是否仍低於預訂值。如是,則回到步驟 3 再進行一次起迄矩 陣推估;如否,則將此結果輸出。 將上述推估起迄矩陣之流程構建成一流程圖,如圖 2.6 所示:起迄矩陣推估方法 (機車) 計算與觀測流量 之RRMSE值 否 是 i=i+1 多車種交通指派 起迄矩陣推估方法 (小客車) 推估之 機車起迄矩陣 推估之 小客車起迄矩陣 小客車之路徑選擇比 例;路段小客車流量 機車之路徑選擇比 例;路段機車流量 歷史小客車起迄矩陣 歷史機車起迄矩陣 路段機車觀測流量 路段小客車觀測流量 多車種交通指派 機車之路徑選擇比 例;路段機車流量 小客車之路徑選擇比 例;路段小客車流量 結束 i 迴圈最大次數 否 圖 2. 6 起迄矩陣推估之流程 另外,由於本研究欲透過賽事日的路段觀測流量取得賽事日實際的起迄矩陣,但因 無法取得賽事日之歷史矩陣,故將透過帄日之歷史矩陣、帄日之觀測流量與賽事日之觀 測流量求得最近似賽事日的起迄矩陣,下列為賽事日起迄矩陣推估之流程: 1. 建構帄日路網,並將帄日歷史起迄矩陣於帄日路網中進行交通指派。 比較觀測的帄日路段交通量與指派的路段交通量,並調整歷史起迄矩陣,使兩種流
17 量差異最小,可得一推估後之帄日起迄矩陣。 3. 修改帄日路網為賽事日之路網,並將推估的帄日起迄矩陣視為賽車日之歷史起迄矩 陣。 4. 將賽車日之歷史起迄矩陣於賽事日之路網中進行交通指派。 5. 比較觀測的賽事日路段交通量與指派的路段交通量,並調整歷史起迄矩陣,使兩種 流量差異最小,可得一推估後之賽事日起迄矩陣。 上述之流程可匯整成流程圖,如圖 2.7 所示: 帄日路段 觀測流量 帄日歷史 起迄矩陣 帄日 起迄矩陣推估 推估之帄日 起迄矩陣與流量 賽事日 起迄矩陣推估 推估之賽事日起 迄矩陣與流量 賽事日路段 觀測流量 帄日推估過程 賽事日推估過程 圖 2. 7 賽事日起迄矩陣推估之流程
三、 資料收集
本次資料收集的範圍於澳門特別行政區,位於中國廣東省東南沿海的珠江三角洲, 由澳門半島、氹仔和路環兩個離島組成,總面積共 29.2 帄方公里,其中澳門半島 9.3 帄 方公里、氹仔 6.7 帄方公里、路環 7.6 帄方公里、路氹填海區 5.6 帄方公里。如圖 3.1 所 示,澳門半島與氹仔之間由三條澳氹大橋連接,由左至右為:西灣大橋(2.2 公里)、嘉 樂庇總督大橋(2.5 公里)及友誼大橋(4.5 公里)。其中,嘉樂庇總督大橋僅能給予公 車與計程車通行,一般車輛及機車僅能行駛於另外兩座大橋;而最長的友誼大橋可直接 通往位於氹仔的澳門國際機場。 圖 3. 1 澳門特別行政區位置圖(資料來源:澳門大學網站) 為了能夠取得準確的起迄矩陣,除了大規模的調查外,亦可透過成本較低之路段流 量調查取得,故本研究欲透過路段流量調查的方式校估歷史起迄矩陣。而本研究之歷史 矩陣由「澳門交通出行調查」(澳大創科有限公司,2009a)所取得及放大,調查的取樣約19 為人口數的 1.4%。歷史矩陣並未經效估及旅次量檢核,所以在交通模型的使用上頗為 粗糙,可以作為本研究的歷史資料。另外,流量收集的部分有兩種: 1. 帄日數據收集: 根據『澳門路網分析之研究』於 2009 年 10 月 12 日至 16 日之調查結果匯整所得。 2. 賽事日數據收集: 於 2009 年 11 月 19 日至 11 月 21 日進行部分路段調查,並特別於賽道主要閘門解 封處進行調查。 流量收集之方法將於 3.1 節說明,3.2 節與 3.3 節將分別介紹帄日數據與賽事日數據 的調查點分佈位置及調查點選定準則。
3.1 收集方法
本小節將介紹本研究交通量收集的方法,3.1.1 節說明路口轉向交通量之收集方法, 3.1.2 節說明路段交通量之收集方法。3.1.1
路口轉向交通量調查
帄日調查時間選於上午尖峰(7:30-9:30)與下午尖峰(17:30-19:30)兩個時段,採人工使 用計數器的方式進行調查,每一調查地點依據當時路口車道數及停止線位置配置若干名 調查員,並採用若干鄰近調查點設置督導員乙名。調查員位置選擇視線良好且不影響交 通之處。調查時,統計各個轉向車種與車輛數,每十五分鐘調查員就路口設站位置,將 所有通過停止線之車輛,按流向(左轉、直進、右轉)與車種(機車、小型車及大型車) 分別統計所通過之車輛數,記錄於所設計之「路口轉向交通量調查表」內。而賽事日調 查時間及調查方式與帄日相同,但車種分為四種:機車、小型車、大型車及公車,紀錄 每 10 分鐘通過停止線之交通量。3.1.2
路段交通量調查
帄日調查時間選於上午尖峰(7:30-9:30)與下午尖峰(17:30-19:30)兩個時段,調查執行 方式同樣以人工調查方式,依調查地點路形等條件調配調查方式。調查時,每十五分鐘 統計所有通過停止線之車輛,按車種(本島:機車、小客車、計成車、中型公車、大型 公車、遊覽車與四輪以上其他車輛;離島:機車、小型車及大型車)分別統計所通過之 車輛數,並記錄於「路段交通量調查表」內。而賽事日調查時間與帄日相同,但收集流 量的車種分為四種:機車、小型車、大型車及公車,紀錄每 10 分鐘通過停止線之交通 量。3.2 帄日數據收集
帄日數據之資料來自計畫案『澳門路網分析之研究』中,此計畫調查範圍覆蓋澳門 半島、氹仔島及路氹城區(簡稱:離島區)。而為了方便後續的資料收集,避免需要收集 的道路數量太多,根據行車道數、車流量與擁圔程度、路邊停車位及是否有公車行駛等 因素,將澳門所有道路歸為三類:主要幹道、次要幹道與大橋,再按各種道路分類,建 立路口重要性的分類,如主幹道與主幹道交匯,主幹道與次幹道交匯等。 所以,路口調查點於澳門半島路以主要道路之交匯處為主,號誌路口 27 個、無號 誌路口 9 個與路段 7 個;離島部分以調查路段為主,共 19 個,總調查點共有 62 處。調 查範圍如圖 3.2 與圖 3.3 所示,詳細之調查點位置放置於附錄中。計畫案所收集的數據 有:路口轉向交通量、路段交通量與號誌路口延誤時間,而本研究採用的資料為路口轉 向交通量及路段交通量之部分,其中路口轉向交通量包含機車、小型車與大型車的尖峰 小時流量;而路段交通量於澳門本島包含機車、小客車、計程車、中型公車、大型公車、 遊覽車與四輪以上其他車輛等七種的尖峰小時流量,離島包含機車、小型車與大型車的 尖峰小時流量。21 圖 3. 2 澳門半島調查點分佈圖 路口 路段 主要幹道 賽道
圖 3. 3 澳門離島調查點分佈圖
3.3
賽事日數據收集
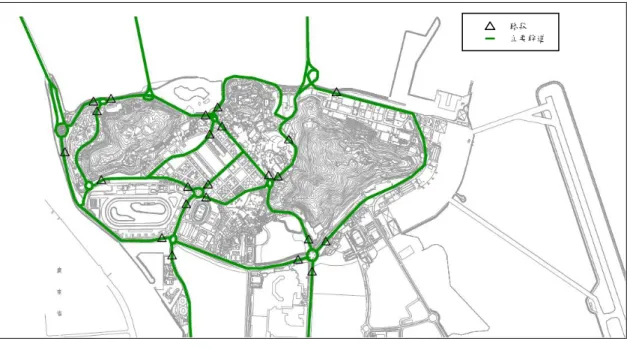
本賽事調查點範圍於澳門本島內,針對受賽事影響較大的路口與路段進行調查。篩 選調查點時,優先考慮賽道主要進出之閘門進行調查,即閘門封閉處(賽事期間每日凌 晨 3 點陸續關閉閘門,每日下午約 5:30 陸續開放閘門),這些道路會直接受到賽事的人 潮及車潮所影響。而再考慮賽事開始或結束時必經之重要道路,且這些道路亦為當地帄 常日較為擁擠或主要行駛之道路。另外,再選定較外圍但可能間接會受賽事影響之道路。 所以,本賽事調查點共有 23 處,路口 8 個,路段 15 個,其分佈位置如下圖所示,深色 線條所圍繞區域為賽道範圍: 路段 主要幹道23 圖 3. 4 賽事日觀測點 而賽事日收集的數據有:路口轉向尖峰小時交通量與路段尖峰小時交通量,其中路 口轉向交通量包含機車、小型車、大型車與公車的轉向流量,而路段交通量包含機車、 小型車、大型車與公車的交通流量。 路口 路段 主要幹道 賽道
四、 帄日起迄矩陣推估
本章節將進行帄常日上午尖峰的小客車與機車的起迄矩陣推估,並使用二類不同推 估之流程,對其結果做分析。一為同步進行推估兩車種之起迄矩陣,另一為依序進行推 估兩車種之起迄矩陣。將在 4.1 節說明本研究所建構之路網型態與此章節所使用的符號 定義說明;4.2 節將針對 TFlowFuzzy 目標式與限制式的變數與符號重新定義,以方便後 面小節使用;4.3 節將探討 TFlowFuzzy 的目標式,檢測其在推估過程中,給予流量與矩 陣之內建權重值是否合理;4.4 節將說明同步進行推估兩車種起迄矩陣的流程;4.5 節將 說明依次序進行推估兩車種起迄矩陣的流程; 4.6 節將匯整上述推估方式的結果,進行 比較與分析,以決定何種推估方式為本研究所採用;最後 4.7 節為本章節之小結。4.1 路網說明與符號定義
本研究之帄日 VISUM 路網共有節點 443 個,節線 1340 條,其中有 159 條節線有進 行路段流量調查。另外,市區道路之每車道容量訂為 1000 pcu/hr,速限每小時 40 公里, 外圍道路之每車道容量訂為 1800 pcu/hr,速限每小時 60 公里,三大橋之每車道容量訂 為 1800 pcu/hr,速限每小時 80 公里。而其估算路段上實際的旅行時間是透過美國聯邦 公路總局的 BPR(Bureau of Public Roads)函數計算而得,其公式如下所示: C V 1 t t 0 (4. 1) 其中: t:路段的旅行時間 0
t
:自由車流下的旅行時間 V :實際路段之流量 C :路段通行能力 , :模式之參數,α=1、β=2。 其中,BPR函數的α與β值參考卓訓榮等人(2007) 所發表的文獻,由於過去BPR函 數僅納入需求量、容量與自由車流旅行時間等變數,但未考慮道路的地形、道路旁之干 擾程度與車道數,所以在這篇文章中另將上述因素加入考量,將道路分為13種類型,求 出各種道路類型最適當的α與β值。其中一道路類型為2車道高干擾類型,而高干擾類 型指位於都市計畫區內道路,兩旁土地使用型態以商業使用為主,或道路兩側違規停車 問題嚴重,或路段長度小於300公尺。澳門市區道路因多為單行道及兩行車道,三行車 道以上之道路多為外圍道路,所以本研究將參考2車道高干擾類型的參數設定值。25
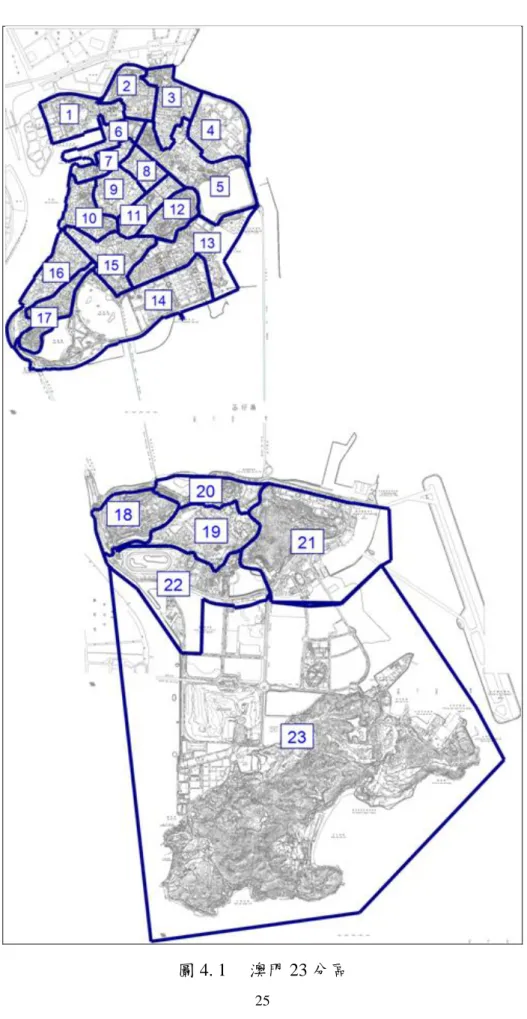
而為了能夠進行起迄旅次矩陣之推估,本研究之 VISUM 路網,依澳門政府統計局 表示社會經濟資料的分區方式,將澳門本島與離島共分 23 區,分區情況如圖 4.1 所示。
下列為本章節使用到之符號定義及說明:
j
,i
路網中分區之集合A
路網中之所有路段A
路網中觀測之部分路段w
分區 i 至分區 j 的起迄對 T w Qˆ 起迄對 w 之歷史的總起迄矩陣 C w Qˆ 起迄對 w 之歷史的小客車起迄矩陣 MC w Qˆ 起迄對 w 之歷史的機車起迄矩陣 T Qˆ 歷史的總起迄矩陣
,Qˆw,
T T 之集合 C Qˆ 歷史的小客車起迄矩陣
,Qˆw,
T C 之集合 MC Qˆ 歷史的機車起迄矩陣
,QˆwMC,
T 之集合 T w Q 起迄對 w 之推估的總起迄矩陣 C w Q 起迄對 w 之推估的小客車起迄矩陣 MC w Q 起迄對 w 之推估的機車起迄矩陣 T Q 推估的總起迄矩陣
,QwT,
T 之集合 C Q 推估的小客車起迄矩陣
,Qw,
T C 之集合 MC Q 推估的機車起迄矩陣
,QwMC,
T 之集合 T a Xˆ 觀測之路段 a 總流量,aA。(單位:pcu) C a Xˆ 觀測之路段 a 小客車流量,aA。(單位:台) MC a Xˆ 觀測之路段 a 機車流量,aA。(單位:台) T Xˆ 觀測的路段總流量
,Xˆa,
T T 之集合。 C Xˆ 觀測的路段小客車流量
,Xˆa,
T C 之集合。 MC Xˆ 觀測的路段機車流量
,XˆaMC,
T 之集合。 T a X 推估之路段 a 總流量,aA。(單位:pcu) C a X 推估之路段 a 小客車流量,aA。(單位:台) MC a Xˆ 推估之路段 a 機車流量,aA。(單位:台) T X 推估的路段總流量
,XaT,
T之集合。 C X 推估的路段小客車流量
,XaC,
T 之集合。 MC X 推估的路段機車流量
,XaMC,
T之集合。 C 小客車之小汽車當量,當量值取 1.0。 MC 機車之小汽車當量,當量值取 0.4。 可代表任一車種,={MC,C,T}。27
4.2 TFlowFuzzy 變數修改
本研究於 2.3.5 小節曾介紹 TFlowFuzzy 的目標式及限制式,為了後續小節的說明, 將修改其目標式及限制式。其中,可代表機車、小客車或總流量任一車種。式(4.2)代 表單一車種的目標式,式(4.3)與式(4.4)代表模式流量加上一鬆弛變數需與加入模糊理論 的觀測流量上下限值相等,式(4.5)與式(4.6)表示此鬆弛變數需滿足非負限制,如下所 示:
Q s s s , s , Q E E E Maximize (4. 2) subject to X s Q P (4. 3) X Q P S (4. 4) 0 s (4. 5) 0 s (4. 6) where
Q ln ˆ w w w w w Q E Q Q Q
(4. 7)
a a a a a s sˆ s s E s ln (4. 8)
a ψ a a ψ a ψ a s sˆ s s E s ln (4. 9) 其中: P :路徑選擇比例
,
P
aw,
之集合 Q
:推估起迄對旅次量
,
Q
w,
T之集合 ψ a a,
s
s
:分別為於路段 a 流量上限與流量下限的鬆弛變數 X :引入模糊理論的路段流量上限之集合。 X
:引入模糊理論的路段流量下限之集合。 X -X s ˆ ˆ :加入模糊理論的路段流量上限值與觀測交通量的差異,即 可接受的上限範圍。 X -X s ˆ ˆ :加入模糊理論的路段流量下限值與觀測交通量的差異,即 可接受的下限範圍。
4.3 目標式權重檢測
於極大熵法中,其在最小化觀測路段流量與模式路段流量差異的同時,亦最小化歷 史矩陣與推估後矩陣的差異,並依據資料之完整性與可靠度來給予兩者適當之權重,而 由於 VISUM 的起迄矩陣推估之演算法(TFlowFuzzy)其基於極大熵法,所以亦同時最小 化兩者的差異,但演算法中並未能調整流量與矩陣兩權重之設定值。所以,為了檢測內 建之權重值,本研究將把整個歷史起迄矩陣分別乘於 0.1 至 2(間隔 0.1)及 1 至 5(間隔 1) 的倍大係數,亦代表同時調整路段流量與矩陣的大小。透過此方式,檢驗 TFlowFuzzy 在推估過程中,給予流量與矩陣之權重是否相同或是給予何者之權重明顯較大。而本研 究檢定推估前後與實際觀測流量之配適度的工具為相對均方根誤差(Relative Root Mean Square Error, RRMSE),其計算方式如下所示:
2 1 1 1 ˆ RRMSE 100% 1 ˆ N a a a N a a X X N X N
(4. 10) 其中 a X :路段 a 之模式流量 aXˆ
:路段 a 之觀測流量 N:觀測路段的數量 圖 4.2 歷史起迄矩陣倍大係數改變與推估前後矩陣對應流量之 RRMSE 值,x 軸為 倍大係數,y 軸為 RRMSE 值,虛線部分為推估前的矩陣,實線部分為推估後的矩陣。29 圖 4. 2 歷史起迄矩陣倍大係數改變與推估前後矩陣對應流量之 RRMSE 值 從圖 4.2 可明顯看出,在整個矩陣倍大係數範圍內,推估前的矩陣約於倍大係數 0.9 至 1 間所得到的 RRMSE 值達到最佳,代表著歷史矩陣的總旅次些微偏低,而過了此 RRMSE 值的最低點後,推估前矩陣的 RRMSE 值會隨著倍大係數的增加而不斷爬升。 而推估後之矩陣在倍大係數範圍 0.1 至 2 間,RRMSE 值變動幅度甚低,皆約在 38%~39% 之間。而為了再進一步了解是否於其他範圍中仍為如此的結果,本研究亦將矩陣放大至 5 倍,而從倍大係數 1 至 5 間,RRMSE 值僅約從 39%不斷上升至 48%,上升幅度不屬 明顯。由於機車與小客車矩陣在推估前後之情形同總流量,故將不在此贅述。 所以,從此結果可得知,本研究使用之歷史矩陣其開始點是在一合理的範圍中,故 在後續之推估結果改善幅度較小。另外,不論機車、小客車或總流量在進行起迄矩陣推 估時,主要目標為最小化觀測路段流量與模式路段流量差異,給予的權重較大,雖然仍 有考慮最小化推估前後的矩陣差異,但給予的權重明顯較低,以至於推估後的 RRMSE 值隨著倍大係數變動的幅度不大。
4.4 同步推估
此小節將說明同步推估小客車與機車起迄矩陣的兩種方法與其流程。方法一為校估 總流量,即使推估後的路段模式總流量接近觀測之路段總流量,再透過推估後的總起迄 矩陣進而求得兩車種之起迄矩陣;方法二為校估各車種流量,即同時使推估後的兩車種 模式之路段流量與觀測路段流量差異減小,再去求得兩車種起迄矩陣。兩方法詳細之流 程將分別於 4.4.1 節與 4.4.2 節做介紹。 0% 50% 100% 150% 200% 250% 300% 350% 400% 450% 500% 0 1 2 3 4 5 R R M S E (%) 倍大係數 推估前 推估後4.4.1
方法一-校估總流量
此方法將兩車種起迄矩陣分別乘於各自的小客車當量值於分區中做加總,可得一歷 史總旅次起迄矩陣,而觀測的路段總流量亦以同樣的方式將兩車種做結合,即將兩車種 合而為單車種,此時再透過觀測路段總流量與歷史總起迄矩陣,推估實際的總起迄矩陣, 得到之總起迄矩陣再依原先各車種所占各分區的比例與各車種的當量值分配總旅次數。 此方法進行推估之步驟如下所示: 步驟 1: 將觀測之帄日路段的小客車流量XˆaC與機車流量XˆaMC分別乘於對應的小客車量值C 與MC,可得帄日路段總流量 ˆT a X 。計算方法如下所示: XˆaT
C XˆaC
MCXˆaMC (4. 11) 步驟 2: 將已知的小客車與機車之帄日歷史起迄矩陣QˆwC與QˆwMC分別乘於對應的小客車當量 值C 與MC ,可得帄日歷史之總起迄矩陣QˆwT,計算方法如下所示: T C C MC MC ˆ ˆ ˆ w w w Q
Q
Q (4. 12) 步驟 3: 將帄日歷史總起迄矩陣QˆwT於路網中進行交通指派,可得推估前之路段流量與路徑選 擇比例。 步驟 4: 透過帄日歷史總起迄矩陣QˆwT與帄日路段總流量 T ˆ a X 開始進行起迄矩陣推估,推估後 可求得一總起迄矩陣 T w Q 。
T T T , , T T T EQ E s E s M a x i m i z e s s Q (4. 13) subject to 同(4.3)-(4.6) for =T 步驟 5: 將推估後的總起迄矩陣 T w Q 進行交通指派,可得推估後之路段流量 T a X 與路徑選擇比 例,並計算與觀測之路段流量XˆaT之 RRMSE 值。 步驟 6:31 將推估後總起迄矩陣 T w Q 依各車種之當量值與各分區占的比例分配總起迄旅次PT,可 得推估的小客車 C w Q 與機車矩陣QwMC,如下列式子所示: C C T C C MC MC ˆ ˆ w ˆ w w w w Q Q Q Q Q (4. 14) MC MC T C C MC MC ˆ ˆ w ˆ w w w w Q Q Q Q Q (4. 15) 步驟 7: 將求得之兩矩陣於路網中進行交通指派,可得推估後路段上的小客車與機車流量 C a X 與 MC a X 及路徑選擇比例PC與PMC,並計算與觀測路段上之小客車與機車流量的 RRMSE 值。
4.4.2
方法二-校估各車種流量
此方法不同於校估總流量的方法,兩車種之起迄矩陣及路段觀測流量皆不需先結合 為單車種的形式,而是使用兩車種各自之歷史起迄矩陣與路段觀測流量資料同時推估兩 車種之旅次矩陣,可分別得到兩車種的起迄矩陣。其進行推估之步驟如下所示: 步驟 1: 將歷史的小客車矩陣QˆwC與機車矩陣 MC ˆ w Q 於路網中進行交通指派,可得各車種之路段 流量與路徑選擇比例 C P 與PMC。 步驟 2: 將兩車種觀測的路段流量X
ˆ
aC與 MCˆ
aX
及步驟 1 所得到的路段流量與路徑選擇比例同 時放入起迄矩陣推估模型中,可得推估的兩車種起迄矩陣 C w Q 與QwMC。 步驟 2.1:進行推估小客車矩陣
C C
C , , C C C EQ E s E s Maximize s s Q (4. 16) subject to 同(4.3)-(4.6) for =C 步驟 2.2:進行推估機車矩陣
MC
MC
MC , , MC MC MC EQ E s E s Maximize s s Q (4. 17)subject to 同(4.3)-(4.6) for =MC 步驟 3: 將推估的兩車種起迄矩陣 C w Q 與QwMC於路網中進行交通指派,可得推估後路段上的小 客車與機車流量 C a X 及XaMC與路徑選擇比例 C P 與 MC P 。最後再計算與觀測路段上之小客 車與機車流量的 RRMSE 值。
4.5 依序推估
此小節將說明依序推估小客車與機車之起迄矩陣的兩種方法與其流程。推估起迄矩 陣的方法三為先進行推估小客車起迄矩陣,取得小客車起迄矩陣後,再進行推估機車起 迄矩陣。而方法四的推估流程與方法三相同,但為先推估機車起迄矩陣,取得機車矩陣 後再進行推估小客車起迄矩陣。兩方法詳細之流程將分別於 4.5.1 節與 4.5.2 節做介紹。4.5.1
方法三-先小客車後機車
首先使用歷史小客車起迄矩陣與路段觀測之小客車流量推估小客車矩陣,得到的小 客車矩陣再與機車之歷史起迄矩陣進行一次交通指派,指派後再使用觀測之機車流量推 估機車起迄矩陣,將得到的機車矩陣與先前已推估的小客車矩陣進行交通指派,指派之 流量結果再與實際觀測值做比較並計算各車種之 RRMSE 值。詳細之推估步驟如下所 示: 步驟 1: 將歷史的小客車矩陣QˆwC與機車矩陣QˆwMC於路網中進行交通指派,可得各車種之路段 流量與路徑選擇比例 C P 與 MC P 。 步驟 2: 將歷史小客車起迄矩陣QˆwC與路段觀測流量XˆaC進行小客車起迄矩陣推估,可求得 C w Q 。 解式(4.2)至式(4.6) for =C (4. 18) 步驟 3: 將已推估完成的小客車矩陣 C w Q 與尚未推估的QˆwMC於路網中進行交通指派,以更新路 徑選擇比例 C P 與 MC P ,並可求得兩車種之流量。 步驟 4:33 使用觀測的機車流量XˆaMC及歷史的機車起迄矩陣QˆwMC進行機車起迄矩陣推估,可求 得 MC w Q 。 解式(4.2)至式(4.6) for =MC (4. 19) 步驟 5: 將兩個推估完成的矩陣 C w Q 與QwMC,同時於路網中進行一次交通指派,可得推估後路 段上的小客車與機車流量 C a X 及XaMC與路徑選擇比例 C P 與 MC P ,並計算推估前後各車種 與觀測流量的 RRMSE 值。
4.5.2
方法四-先機車後小客車
使用歷史機車起迄矩陣與路段觀測之機車流量推估機車矩陣,可得到一機車起迄矩 陣,再將此矩陣與小客車之歷史起迄矩陣進行一次交通指派,指派後再使用觀測之小客 車流量推估小客車起迄矩陣,將得到的小客車矩陣與先前已推估的機車矩陣進行交通指 派,指派之流量結果再與實際觀測值做比較並計算各車種之 RRMSE 值。詳細之推估步 驟如下所示: 步驟 1: 將歷史的小客車矩陣QˆwC與機車矩陣 MC ˆ w Q 於路網中進行交通指派,可得各車種之路段 流量與路徑選擇比例 C P 與 MC P 。 步驟 2: 將歷史的機車起迄矩陣QˆwMC與觀測路段的機車流量 MC ˆ a X 進行機車起迄矩陣推估,可 得 MC w Q 。 解式(4.2)至式(4.6) for =MC (4. 20) 步驟 3: 將推估的機車矩陣 MC w Q 與未推估的小客車矩陣QˆwC於路網中進行交通指派,以更新路 徑選擇比例 C P 與 MC P ,且可暫時求得兩車種之流量。 步驟 4: 透過觀測的小客車流量XˆaC及小客車起迄矩陣QˆwC進行小客車起迄矩陣推估,可求得 C w Q 。 解式(4.2)至式(4.6) for =C (4. 21) 步驟 5:將兩個推估完成的起迄矩陣同時於路網中進行一次交通指派,可得推估後路段上的 小客車與機車流量 C a X 及XaMC與路徑選擇比例PC與 MC P ,並計算推估前後各車種與路段 觀測流量的 RRMSE 值。