I
NTRODUCTION
Intelligent transportation systems (ITSs) have attracted considerable interest in recent years. A real-time traffic information service is one of the most promising ITS applications. Conventional approaches suggest a traffic management center to collect road condition data from roadside traffic sensors, allowing drivers to determine cur-rent traffic conditions. Unfortunately, the instal-lation and maintenance of a central server and roadside equipment may be prohibitively expen-sive. With the aid of Global Positioning System (GPS) and wireless technology, vehicles on roads can act as sensors and exchange information about the traffic conditions they experience through wireless communications. Such a decen-tralized approach can be quickly deployed and offers a low-cost traffic information service with-out the need for a server infrastructure.
In early decentralized systems, vehicles utilize intervehicle communication (IVC) [1] to dissemi-nate and query traffic information in a hop-by-hop manner. However, the IVC network may become disconnected under low vehicle densities. To over-come this problem, vehicles may form an applica-tion-layer peer-to-peer (P2P) network and share
their traffic information with each other through the broadband wireless infrastructure such as third generation (3G) or WiMAX. However, the com-munication delay in the infrastructure network could be on the order of hundreds of milliseconds, and it may introduce significant service latency when the traffic information lookup has to traverse several hops in a P2P overlay.
As vehicles are envisioned to carry multiple types of wireless interfaces, they can communi-cate with each other via not only short-range ad hoc communication such as IEEE 802.11p but also long-range infrastructure communication such as 3G or WiMAX [2]. This article proposes a two-tier vehicular ad hoc network (VANET)/ P2P architecture that integrates an ad hoc net-work and an infrastructure-based P2P system to offer a decentralized traffic information service. In the proposed system, vehicles first exchange observed traffic information through IVC in the low-tier VANET. A portion of the vehicles hav-ing infrastructure connectivity are elected as superpeers. On top of the VANET, the super-peers further form a P2P overlay through the broadband wireless infrastructure. This high-tier P2P overlay can mitigate the disconnectivity problem of the VANET and improve the success rate of traffic information lookups.
In this article, we first classify decentralized traffic information systems into four architec-tural categories and present their designs, and propose the two-tier architecture. We then com-pare different architectures and evaluate their performance through simulation. Finally, we conclude this article.
D
ECENTRALIZED
T
RAFFIC
I
NFORMATION
S
YSTEM
A number of decentralized traffic information systems have been proposed to reduce the main-tenance costs of the centralized server approach. These systems have relied on traffic condition data collected and shared by vehicles themselves. A vehicle is assumed to be able to obtain its geo-graphical position and moving speed via GPS or other means, having a digital map with road net-work information. Roads are divided into seg-ments, and each segment is associated with a segment identifier (ID) and geographical posi-tion. The traffic conditions of each road segment
A
BSTRACT
Decentralized traffic information systems real-ize real-time traffic information services without the need for a server infrastructure. However, existing systems rely on either the vehicular ad hoc network or application-layer peer-to-peer protocols over a broadband wireless network suf-fering from low lookup success rate, high lookup latency, and maintenance overhead of the P2P network. This article proposes a two-tier VANET/P2P architecture that exploits both VANET and P2P technology. In the low tier, vehicles form a VANET via intervehicle commu-nication to exchange traffic information. On top of the VANET, a portion of the vehicles further establish a P2P overlay through a broadband wireless infrastructure to mitigate the disconnec-tivity problems of the VANET. Simulation results demonstrate that the two-tier architecture can sig-nificantly improve the lookup success rate com-pared to the single-tier VANET systems while reducing lookup latency and maintenance over-head compared to the single-tier P2P systems.
AUTOMOTIVE
NETWORKING AND
APPLICATIONS
Shiao-Li Tsao and Chien-Ming Cheng, National Chiao Tung University
Design and Evaluation of a Two-Tier
are described in a traffic report that contains the road segment ID, traffic information, and a timestamp. Each vehicle generates its own traffic reports based on its observations and traffic mes-sages obtained from other vehicles. The methods of deriving the statistical traffic information are beyond the scope of this article. Interested read-ers can refer to [3] for more information.
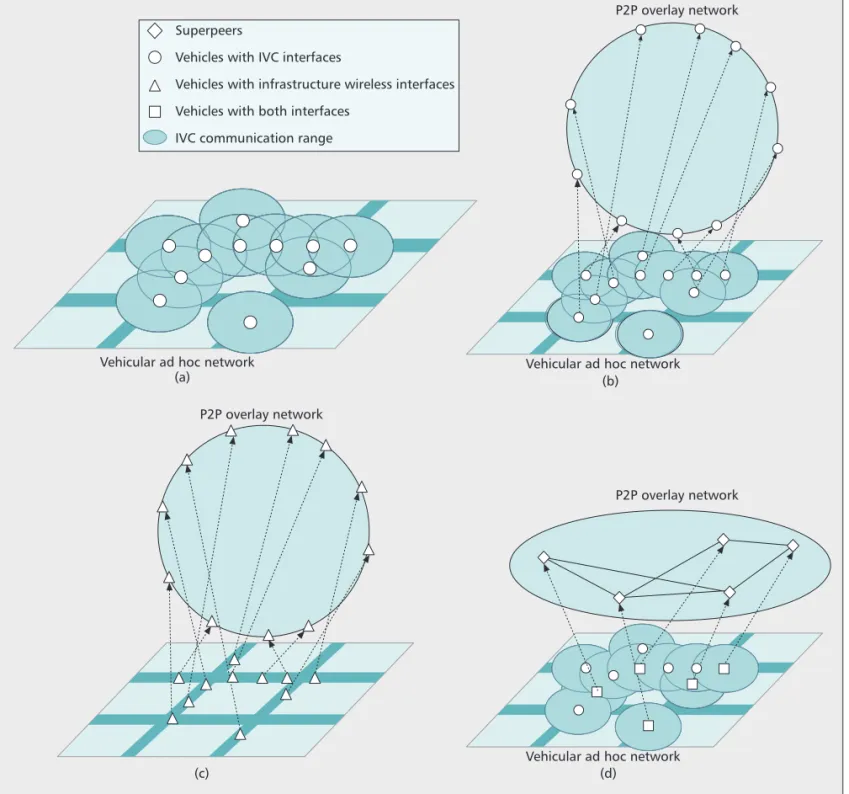
According to the use of wireless technologies and system designs, we categorize decentralized traffic information systems into four different architectures: single-tier VANET, single-tier P2P over VANET, single-tier infrastructure-based P2P, and two-tier VANET/P2P. This section presents the first three single-tier architectures, and the next section proposes the two-tier architecture.
S
INGLE-T
IERVANET
In VANETs, vehicles communicate with each other through IVC, and periodically broadcast their cur-rent speeds and positions to neighboring vehicles. A part of the traffic information a vehicle receives may also be propagated to its neighbors through broadcast messages. Based on the received mes-sages, a vehicle can generate traffic reports. Figure 1a shows the single-tier VANET architecture.
A number of systems have been developed based on this architecture. In the Self-Organiz-ing Traffic Information System (SOTIS) [4], vehicles continuously broadcast their driving sta-tus with parts of the information of other road segments that are heard from neighboring vehi-cles. Each vehicle gathers only traffic informa-tion of the local road segments (e.g., a radius of 50–100 km). StreetSmart focuses on discovering and disseminating congestion information [5]. Vehicles use data clustering algorithms to aggre-gate the collected data and exchange only the most significant information such as areas of unexpected speed. However, the traffic informa-tion may be outdated or incomplete, especially for road segments far away from the vehicle.
In VANETs, traffic information can be quick-ly disseminated among vehicles through IVC. However, the dissemination requires a sufficient number of vehicles in the network. When the vehicle density is insufficient, vehicles may not be able to form a fully connected VANET. In that case, traffic information cannot be distribut-ed to all vehicles or successfully found. To improve the connectivity, additional roadside units connected via a backbone network could be used to exchange traffic information with vehicles via wireless communication [6]. Howev-er, the additional roadside units introduce extra installation and maintenance costs. Another issue for the single-tier VANET system is the broadcast storm problem in a high-vehicle-densi-ty environment if each node rebroadcasts every received message. A number of solutions have been presented to alleviate the problem [7]. For example, a vehicle rebroadcasts the query mes-sage only if it is closer to the location of the requested road segment than the previous node.
S
INGLE-T
IERP2P
OVERVANET
The above architecture can be further extended to a P2P over VANET architecture. Vehicles form an application-layer P2P overlay network on top ofthe VANET. The P2P overlay can be unstructured such as Gnutella, or structured such as Chord [8]. The vehicles share their resources (i.e., traffic information) and retrieve resources from others through the P2P overlay. The application-layer P2P overlay communication relies on the routing protocol of the underlying VANET [9]. A vehicle should establish a routing path in the VANET first; then an application-layer message can be transmitted along the route to another vehicle.
The key difference between the P2P over VANET architecture and the previous architec-ture is the traffic information lookup. In the pre-vious approach, a vehicle floods a query message to all neighboring vehicles within the IVC range. In this architecture, a vehicle explicitly forwards the query by exploiting the application-layer P2P lookup mechanism and the VANET routing. In an unstructured P2P overlay such as a Gnutella-based system, the lookup is Gnutella-based on time-to-live (TTL)-limited flooding in the overlay. If a vehicle does not have a report, it forwards the query to its Gnutella neighbors, not VANET neighbors, through the VANET routing paths. In a struc-tured P2P overlay such as a Chord-based system, a vehicle examines its finger table to select the node whose identifier is closest to the key of the report. The vehicle directly forwards the query message to the node through the established VANET routing path. The lookup procedure continues until the query reaches the successor of the key. Moreover, because vehicles are usually moving, the participating vehicles and P2P lay topology continuously change. The P2P over-lays thus require performing periodic stabilization procedures. For example, in an unstructured P2P overlay such as Gnutella, vehicles must periodi-cally send PING messages to their P2P neighbors. A PONG message is sent in reply if a P2P neigh-bor remains in the overlay. When a vehicle detects the departure of a neighbor, it randomly connects to another vehicle as its new P2P neighbor.
Recent studies of P2P file sharing systems in mobile and vehicular ad hoc networks have adopted the architecture. The P2P overlay enables users to locate the resources they need in such an environment. Although the architec-ture can also be applied to the traffic informa-tion system, maintaining the services is difficult due to dynamics of traffic information and high vehicular mobility. To improve performance of the application-layer P2P protocol, cross-layer approaches that extract useful information from the lower-layer protocol messages for supporting the construction and maintenance of the upper-layer P2P network were proposed [10].
The application-layer P2P overlay is utilized for vehicles to locate traffic information efficiently. Although the architecture may minimize redun-dant rebroadcasts of query messages, additional efforts are required for maintaining the P2P over-lay. The transmission of lookup and maintenance messages through the P2P overlay requires the use of underlying VANET routing protocols and must introduce routing overhead in the bandwidth-lim-ited VANET. Additionally, due to the P2P overlay being built on top of the VANET, the architecture also suffers from the same disconnectivity problem under low vehicle densities as the previous single-tier VANET system.
In VANETs, vehicles communicate with each other through IVC, and periodically broadcast their cur-rent speeds and positions to
neigh-boring vehicles. A part of the traffic information that a vehicle receives may
also be propagated to its neighbors through broadcast
S
INGLE-T
IERI
NFRASTRUCTURE-B
ASEDP2P
Another single-tier architecture involves forming a P2P overlay through an infrastructure network. Vehicles are required to have a broadband wire-less interface to access the infrastructure net-work. Vehicles communicate with each other through infrastructure communication instead of ad-hoc communication. The P2P overlay could be unstructured or structured. Figure 1c shows an example of the architecture based on a struc-tured P2P [11]. In this system, vehicles form a structured P2P overlay and query traffic infor-mation through cellular communication, thereby avoiding the disconnectivity problem of VANETs. However, a previous study [12] indi-cated that structured P2P systems suffer from frequent node join/leave (i.e., churn), and they
are less efficient than unstructured P2P systems in dynamic network environments such as mobile and vehicular networks. Although the approach utilizes an infrastructure communication system to avoid network disconnectivity, it does not uti-lize IVC, which is an efficient and low-latency solution for short-distance information exchanges. Therefore, this article proposes a two-tier traffic information system that combines a low-tier VANET and a high-tier P2P overlay.
A T
WO
-T
IER
T
RAFFIC
I
NFORMATION
S
YSTEM
We propose a two-tier architecture for traffic information systems, shown in Fig. 1d. Vehicles are first organized into groups in VANETs.Sim-Figure 1. Four architectural categories of decentralized traffic information systems.
Vehicular ad hoc network
(a) (b)
(c) (d)
Vehicular ad hoc network Vehicular ad hoc network
P2P overlay network
P2P overlay network
P2P overlay network Superpeers
Vehicles with IVC interfaces
Vehicles with infrastructure wireless interfaces Vehicles with both interfaces
ilar to the single-tier VANET architecture, traf-fic information is broadcasted and exchanged among vehicles through IVC. Some vehicles in the groups are selected to form a high-tier P2P overlay through infrastructure wireless commu-nication. These vehicles are called superpeers and serve as a bridge between the high-tier and low-tier networks to handle message exchanges and lookups.
S
UPERPEERS
ELECTION ANDM
AINTENANCESeveral distributed clustering algorithms, such as the Lowest-ID and Highest-Degree algorithms, have been proposed for mobile ad hoc networks (MANETs) and VANETs and can be applied to superpeer election in the proposed system. In these algorithms, nodes periodically broadcast information such as the node identifier or con-nectivity degree to neighboring nodes. After receiving the ID or connectivity information, a node can determine whether it is a clusterhead with the lowest ID or the highest connectivity in a cluster. In the proposed system, the clusterhead is called a superpeer, and other nodes in the cluster are called normal peers. The superpeers from dif-ferent clusters further form a P2P overlay using infrastructure wireless communication. Note that the superpeers participate in both the VANET and P2P overlay, while normal peers only perform low-tier VANET operations. Due to high vehicu-lar mobility, the topology of VANETs changes rapidly. Therefore, the superpeer election must be performed periodically to accommodate this dynamic topology. To reduce the overhead of information exchange in determining the super-peers, combining clustering messages with traffic information dissemination is preferable.
The proposed system uses the ID-based clus-tering algorithm because the algorithm is simple and could maintain stable clusters in VANETs. Each vehicle has a cluster ID that may differ from the ID used in a structured P2P overlay. The vehicle with the lowest ID in a cluster becomes the superpeer. However, the ID-based algorithm only forms single-hop clusters. To sup-port multi-hop clusters, the proposed system combines Max-Min d-cluster formation [13] with the ID-based clustering selection. Therefore, vehicles can access any superpeers in d hops.
All normal peers rely on superpeers to access the high-tier P2P overlay; therefore, additional computation and communication costs are imposed on the superpeers. An issue of fairness arises as a vehicle serving as the superpeer all the time may be undesirable. To deal with this issue, one simple approach is to use a different cluster ID when a vehicle re-joins the system. For example, a vehicle can generate a different ID by hashing its original ID with a random number upon joining. The vehicle with the lowest ID will not be elected as the superpeer again because it may have a dif-ferent ID. To achieve improved fairness, the ID generation can account for the time periods of being a superpeer. The longer the period, the higher the ID is generated next time. More-over, an incentive mechanism can be incorpo-rated into the traffic information sharing service so that users would be willing to take the role of superpeers.
H
IGH-T
IERP2P O
VERLAYN
ETWORKThe vehicles elected as superpeers utilize their infrastructure wireless interfaces to form a high-tier P2P overlay that could be unstructured or structured. As mentioned above, the unstruc-tured P2P approach that is resilient to overlay dynamics would be appropriate for the system.
In an unstructured P2P overlay such as a Gnutella-based system, because the geographical positions of road segments are well defined on a digital map and all vehicles are aware of their own locations, geographic routing (i.e., position-based routing) can be applied to the lookup mechanism. The geographic routing mechanism routes a query to the neighbors geographically close to the road segment in the query. This approach considerably reduces the number of lookup messages in the P2P overlay compared with the conventional flooding approach.
T
RAFFICI
NFORMATIONL
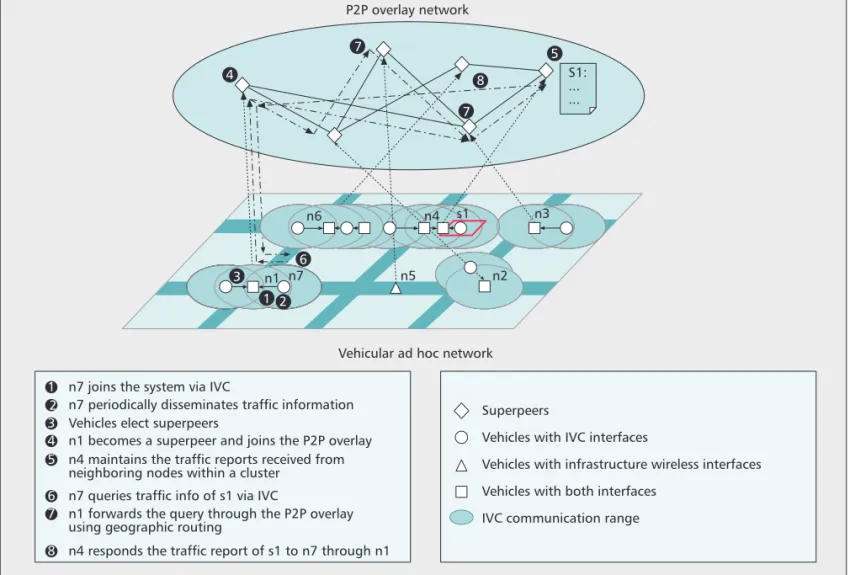
OOKUPTraffic information can be queried via IVC in the low-tier VANET. However, due to the limited connectivity of VANET, the lookup through IVC may be inefficient and prone to failure, especially when looking for traffic information on a distant geographical region. Therefore, the proposed sys-tem simultaneously performs the lookup in the VANET and P2P overlay. Normal peers broadcast query messages to superpeers via IVC. When a superpeer receives or originates a query, it sends the query to other vehicles in the P2P overlay via an infrastructure wireless interface. Depending on the adopted P2P approach, the P2P lookup could be flooding or structural. Upon receiving the query from other superpeers, a superpeer will reply if it has the requested traffic report. The superpeer that receives the replied report further broadcasts the report via IVC if a normal peer originates the query. Figure 2 provides an example of the proposed two-tier system based on a VANET and unstructured P2P overlay.
C
OMPARISONS AND
I
SSUES
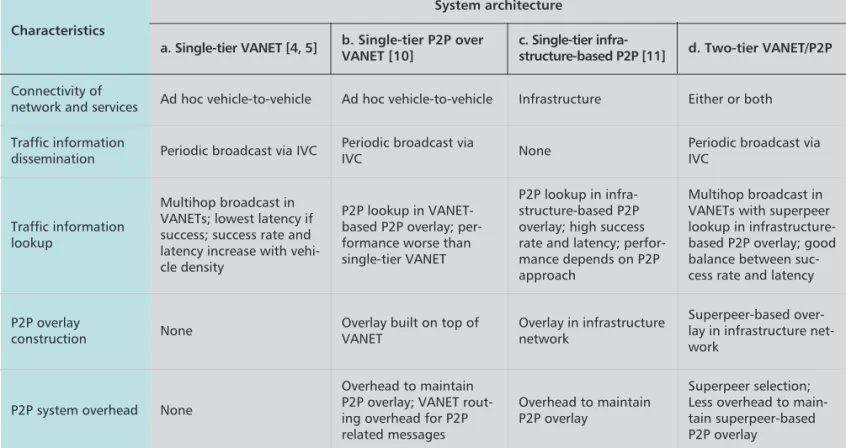
Table 1 summarizes the qualitative comparisons of the four architectures for realizing a decen-tralized traffic information system.
C
ONNECTIVITY OFN
ETWORK ANDS
ERVICESVehicles participating in the single-tier systems are required to have either IVC interfaces for VANET and P2P over VANET systems, or broadband wireless network interfaces for infra-structure-based P2P systems. A vehicle cannot access the traffic information service if it does not support the required communication system. By contrast, the proposed two-tier system does not impose such a constraint on vehicles. A vehicle with only IVC capability performs the exchange and lookup of traffic information in the low-tier VANET as though it participates in VANET-based systems. Additionally, the vehicle can access the traffic information through superpeers and the high-tier P2P overlay. A vehicle with only infrastructure connectivity joins the P2P overlay where it can retrieve traffic information from other superpeers, which may connect to other vehicles using IVC. The proposed two-tier
archi-The vehicles elected as superpeers utilize their infrastructure wireless interfaces to
form a high-tier P2P overlay that could be
unstructured or structured. The unstructured P2P approach that is resilient to overlay dynamics would be appropriate for the system.
tecture is more flexible, so it can accommodate vehicles with different wireless technologies.
T
RAFFICI
NFORMATIOND
ISSEMINATIONIn both single-tier VANET-based and two-tier systems, vehicles periodically disseminate their observed traffic conditions via IVC. As a result, a vehicle can aggregate received traffic informa-tion to generate a traffic report, which is more accurate than that based on a single observation. Due to traffic information being disseminated and propagated in a single-hop or multihop broadcast fashion, a vehicle can have an overview of traffic conditions of an area, although the information may not be up to date. Due to the limited bandwidth of a VANET, the single-hop broadcast is preferred to avoid overhead of multi-hop broadcasts and broadcast storms.
By contrast, no such dissemination exists in the single-tier infrastructure-based P2P systems. Each vehicle knows only the traffic conditions of road segments it has visited and the traffic infor-mation of responsible road segments that the vehicle handles when using structured P2P approaches. A vehicle must perform a lookup to obtain the required traffic information.
T
RAFFICI
NFORMATIONL
OOKUPIn the single-tier VANET system, the lookup can achieve a low latency, for example, a few milliseconds, through direct communication
between vehicles; but may fail due to network partitioning under low vehicle densities. As the density increases, an increase occurs not only in the connectivity, but also in communication interferences and collisions. Therefore, both the success rate and lookup latency increase when more vehicles participate in the system. An effi-cient lookup based on multi-hop communication remains a challenge for VANETs.
The single-tier P2P over VANET approach integrates the P2P lookup mechanism and VANET routing protocols to perform lookups in VANETs. With a P2P overlay built on top of the VANET, the approach inherits the network dis-connectivity problem and bandwidth limitations of VANETs. Moreover, the application-layer P2P overlay relies on VANET routing to trans-mit lookup and maintenance messages over VANET. When the number of vehicles increas-es, routing, lookup, and maintenance messages are considerably increased in the VANET. This architecture suffers a scalability problem.
When an application-layer P2P overlay is built through an infrastructure network, the lookup performance depends mainly on the adopted P2P approach, regardless of the vehicle density. However, the infrastructure wireless communication has a higher transmission delay than IVC. Therefore, lookups in the single-tier infrastructure-based P2P systems achieve a high success rate but long latencies. In the proposed
Figure 2. An example of a two-tier traffic information system based on a VANET and unstructured P2P overlay.
Vehicular ad hoc network P2P overlay network
n4 responds the traffic report of s1 to n7 through n1 8 n7 n5 n2 n3 s1 S1: ... ...
n1 forwards the query through the P2P overlay using geographic routing
7
n7 queries traffic info of s1 via IVC 6
n4 maintains the traffic reports received from neighboring nodes within a cluster
5
n1 becomes a superpeer and joins the P2P overlay 4
Vehicles elect superpeers 3
n7 periodically disseminates traffic information 2
n7 joins the system via IVC 1
n4
n1 n6
Superpeers
Vehicles with IVC interfaces
Vehicles with infrastructure wireless interfaces Vehicles with both interfaces
IVC communication range 1 2 6 3 5 4 7 7 8
two-tier system, short-distance lookups can be performed quickly through the low-tier VANET, and the long-distance query can take advantage of the high-tier P2P overlay to mitigate the net-work disconnectivity problem. The radio resource of the wireless infrastructure is also limited; therefore, adaptive schemes that per-form lookups between the two networks (accord-ing to road networks, vehicular mobility, and network conditions) to minimize the lookup overhead over the high-tier P2P overlay need to be further studied.
P
EER-
TO-P
EERO
VERLAYC
ONSTRUCTIONPeer-to-peer traffic information systems differ from P2P file sharing systems in many aspects, including highly dynamic participants, high data update and query rates, and highly correlated data. These characteristics should be considered when designing P2P traffic information systems. In an unstructured P2P network such as a Gnutella-based system, the unstructured P2P overlay could accommodate the frequent changes of network topology. Vehicles collect traffic reports locally without publishing reports to other vehicles. In contrast, more efforts are needed in a structured P2P network, such as a Chord-based system, to maintain the overlay structure and publish reports to the responsible vehicles.
The traffic conditions along a route to the destination are usually queried simultaneously. By adopting the geographic routing scheme that forwards lookups through an unstructured P2P overlay, the lookup forwarding path approxi-mately follows the route toward the destination. Therefore, fewer lookups are required to obtain the required traffic information. In contrast, an individual lookup must be performed for each
road segment in the structured P2P system. Another structured P2P approach, Content Addressable Network (CAN) [8], uses a 2D coordinate space. The lookup routing path in the CAN space would come as close to the route in the road network as the geographic lookup rout-ing in an unstructured P2P overlay. However, the CAN approach still requires considerable overlay maintenance overhead. The above char-acteristics cause the unstructured P2P approach to be more applicable than the structured approach for the decentralized traffic informa-tion systems.
The two-tier system organizes superpeers in a P2P overlay as a hierarchical structure. As a result, the overall maintenance and lookup over-heads are reduced because they grow as a func-tion of the number of participants. The hierarchical design improves the scalability and performance of the P2P systems. To reduce the load on superpeers and improve the perfor-mance of superpeer overlay, further improve-ments, such as a multilevel hierarchy and superpeer redundancy, are left for future work.
P
ERFORMANCE
E
VALUATION
We used the microscopic road traffic generator Simulation of Urban Mobility (SUMO) [14] to generate vehicular mobility traces that were then fed into the QualNet network simulator [15]. The road topology was a 5000 m × 5000 m grid road network, in which each road segment was 500 m with two lanes in each direction. The maximum vehicle speed was set to 13.9 m/s. The vehicle density varied from 1.8 to 10.9 vehicles/km. To maintain these densities, a new vehicle joined the network whenever an existing vehicle left. The vehicular network used IEEE
Table 1. Comparison of architectures for decentralized traffic information systems.
Characteristics
System architecture
a. Single-tier VANET [4, 5] b. Single-tier P2P over VANET [10]
c. Single-tier
infra-structure-based P2P [11] d. Two-tier VANET/P2P
Connectivity of
network and services Ad hoc vehicle-to-vehicle Ad hoc vehicle-to-vehicle Infrastructure Either or both Traffic information
dissemination Periodic broadcast via IVC
Periodic broadcast via
IVC None
Periodic broadcast via IVC
Traffic information lookup
Multihop broadcast in VANETs; lowest latency if success; success rate and latency increase with vehi-cle density
P2P lookup in VANET-based P2P overlay; per-formance worse than single-tier VANET
P2P lookup in infra-structure-based P2P overlay; high success rate and latency; perfor-mance depends on P2P approach
Multihop broadcast in VANETs with superpeer lookup in infrastructure-based P2P overlay; good balance between suc-cess rate and latency
P2P overlay
construction None
Overlay built on top of VANET
Overlay in infrastructure network
Superpeer-based over-lay in infrastructure net-work
P2P system overhead None
Overhead to maintain P2P overlay; VANET rout-ing overhead for P2P related messages
Overhead to maintain P2P overlay
Superpeer selection; Less overhead to main-tain superpeer-based P2P overlay
802.11a with lognormal shadowing, two-ray path loss, and Rayleigh fading. The radio range was 250 m. Each vehicle was equipped with both IVC and infrastructure wireless communication interfaces. We simulated each scenario for 200 s and 10 runs.
Gnutella and Chord were used as the repre-sentative unstructured and structured P2P approaches, respectively. In the Gnutella net-work, each node maintained 15 neighbors, and the geographic routing mechanism was applied to search traffic reports with a TTL of 7. The identifier space was set to 215in the Chord
net-work. Both P2P networks performed stabiliza-tion every 10 s. The cluster size was set to one. The TTL value for searching in the VANET was infinite so that all connected vehicles in the VANET could receive the traffic reports and queries. These settings help us to understand the net improvement by introducing a P2P overlay.
In all scenarios, the P2P over VANET approach performs more poorly than the single-tier VANET approach with a success rate below 20 percent and lookup latency over 100 ms. Results of the P2P over VANET architecture are excluded from the comparisons in the figures below. Therefore, we consider five different design strategies among the other three architec-tures: the single-tier VANET approach (1T-VANET); the single-tier infrastructure-based P2P approach using Chord (1T-struct); the sin-gle-tier infrastructure-based P2P approach using Gnutella (1T-unstruct); the two-tier approach using Chord (2T-struct); and the two-tier approach using Gnutella (2T-unstruct).
Figure 3 shows the lookup success rate under different vehicle densities. This figure shows that the VANET system has the lowest lookup success rate, especially in low-density scenarios. This is because some lookups cannot reach the vehicles with the requested traffic reports in the disconnected VANET. This problem can be alleviated by increasing the density or introducing an infrastructure-based P2P overlay. Both single-tier structured and unstructured P2P approaches significantly improve the lookup success rate because vehi-cles can communicate with any other vehivehi-cles through infrastructure communication. For these approaches, incorrect neighbor or finger information on P2P nodes is mainly caused by churn, resulting in lookup failures. The unstructured P2P approach adapts to churn much more effectively than the structured P2P approach in a dynamic network, as the single-tier unstructured P2P system achieves nearly a 100 percent lookup success rate.
The two-tier structured P2P system outper-forms the VANET system because it also con-ducts lookups over the P2P overlay and can mitigate the disconnectivity problem of the VANET. The two-tier structured P2P system has a success rate slightly lower than the single-tier system because the periodic superpeer selection may cause peer join/leave, and the structured P2P approach is vulnerable to churn. In contrast, the two-tier unstructured P2P system is resilient to churn and achieves nearly a 100 percent lookup success rate, further accelerating the
lookup and reducing maintenance costs com-pared to a single-tier P2P system.
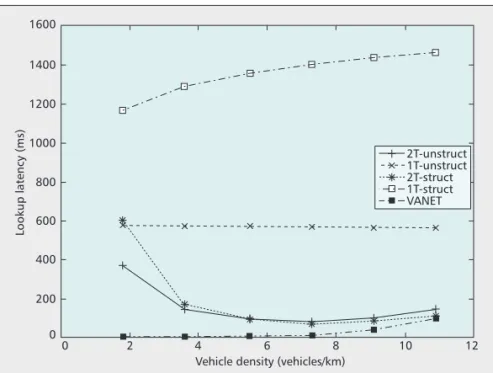
Figure 4 shows the average latencies of suc-cessful lookups. The VANET system achieves the shortest lookup latencies because of low-latency IVC. The lookup low-latency and success rate both increase with the density because more vehicles are in a connected VANET, and a query must be propagated for more hops. The single-tier structured P2P system has the longest latency because the lookup hop count is pro-portional to the logarithm of the Chord net-work size. A successful lookup requires approximately six to eight hops as one-hop latency in infrastructure networks could be 200 ms long. Compared to the single-tier structured P2P system, the single-tier unstructured P2P
Figure 3. Lookup success rate for different approaches.
Vehicle density (vehicles/km) 2
0 0.2
0
Lookup success rate
0.4 0.6 0.8 1 4 6 8 10 12 2T-unstruct 1T-unstruct 2T-struct 1T-struct VANET
Figure 4. Lookup latency for different approaches.
Vehicle density (vehicles/km) 2 0 800 0 Lookup latency (ms) 600 400 200 1000 1200 1400 1600 4 6 8 10 12 2T-unstruct 1T-unstruct 2T-struct 1T-struct VANET
system improves lookup latency by 50–60 per-cent, because the geographic lookup can reach every vehicle within three hops. By combining a VANET and infrastructure-based P2P overlay, lookups can be simultaneously distributed over the VANET and P2P overlay to improve the latency further. The two-tier systems outper-form the single-tier P2P systems because low latencies can be achieved through lookups in VANETs. Moreover, the unstructured P2P approaches are more suitable for single-tier and two-tier traffic information systems because they achieve higher lookup success rates and introduce less lookup latencies than the struc-tured P2P approaches.
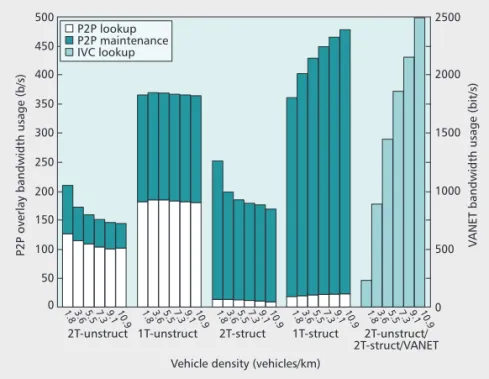
Figure 5 shows the average bandwidth usage of VANET (that is, IVC) and P2P overlay (that is, infrastructure network) per vehicle. The right side of Figure 5 shows the bandwidth usage of IVC lookups. The bandwidth usage of VANET for single-tier VANET and two-tier VANET/P2P architectures significantly increases with the vehicle density. The single-tier P2P and two-tier systems occupy a certain infrastructure network bandwidth in performing the lookup and mainte-nance of the P2P overlay. The two-tier systems reduce bandwidth usage by 40-60 percent com-pared with the single-tier P2P systems because only some vehicles perform the P2P operations. Although the unstructured P2P approach requires more bandwidth for P2P lookups, it still outperforms the structured P2P approach because of less P2P maintenance overhead.
C
ONCLUSIONS
In this article, we investigate existing single-tier architectures and further propose a two-tier VANET/P2P system for providing decentralized traffic information services. We analyze design issues of different approaches and compare their performance through the SUMO traffic simula-tor and QualNet network simulasimula-tor. Simulation
results reveal that the two-tier architecture achieves much higher lookup success rates than VANET-based systems and outperforms single-tier infrastructure-based P2P systems in terms of success rate, latency, and maintenance cost. Open research issues for the new two-tier archi-tecture such as adaptive lookup and routing in between VANET/P2P networks, superpeer selec-tion and redundancy, and others are also identi-fied in this article and should be further studied.
R
EFERENCES[1] M. L. Sichitiu and M. Kihl, “Inter-Vehicle Communica-tion Systems: A Survey,” IEEE Commun. Surveys &
Tuto-rials, vol. 10, no. 2, 2008, pp. 88–105.
[2] P. Papadimitratos et al., “Vehicular Communication Sys-tems: Enabling Technologies, Applications, and Future Outlook on Intelligent Transportation,” IEEE Commun.
Mag., Nov. 2009, pp. 84–95.
[3] P. Krishnamurthy, “Information Dissemination and Information Assurance in Vehicular Networks: A Sur-vey,” Proc. iConference, Feb. 2008.
[4] L. Wischhof, A. Ebner, and H. Rohling, “Information Dissemination in Self-Organizing Intervehicle Net-works,” IEEE Trans. Intell. Transportation Sys., vol. 6, no. 1, Mar. 2005, pp. 90–101.
[5] S. Dornbush and A. Joshi, “StreetSmart Traffic: Discov-ering and Disseminating Automobile Congestion Using VANETs,” Proc. VTC ’07-Spring, Apr. 2007.
[6] C. Lochert et al., “The Feasibility of Information Dissem-ination in Vehicular Ad Hoc Networks,” Proc. WONS, Jan. 2007, pp. 92–99.
[7] B. Williams and T. Camp, “Comparison of Broadcasting Techniques for Mobile Ad Hoc Networks,” Proc.
Mobi-Hoc, June 2002.
[8] E. K. Lua et al., “A Survey and Comparison of Peer-to-Peer Overlay Network Schemes,” IEEE Commun. Surveys
& Tutorials, vol. 7, no. 2, 2005, pp. 72–93.
[9] F. Li and Y. Wang, “Routing in Vehicular Ad Hoc Net-works: A Survey,” IEEE Vehic. Tech. Mag., vol. 2, no. 2, June 2007, pp. 12–22.
[10] C.-L. Liu, C.-Y. Wang, and H.-Y. Wei, “Cross-Layer Mobile Chord P2P Protocol Design for VANET,” Int’l. J.
Ad Hoc and Ubiquitous Comp., 2009.
[11] J. Rybicki et al., “Challenge: Peers on Wheels-A Road to New Traffic Information Systems,” Proc. ACM
Mobi-com, 2007, pp. 215–21.
[12] Y. Chawathe et al., “Making Gnutella-like P2P Systems Scalable,” Proc. ACM SIGCOMM, Aug. 2003, pp. 407–18. [13] A. D. Amis et al., “Max-Min D-Cluster Formation in
Wire-less Ad Hoc Networks,” Proc. INFOCOM, 2000, pp. 32–41. [14] SUMO, http://sumo.sourceforge.net.
[15] QualNet, http://www.scalable-networks.com/prod-ucts/qualnet.
B
IOGRAPHIESSHIAO-LITSAO[M] ([email protected]) earned his Ph.D. degree in engineering science from National Cheng Kung University in 1999. His research interests include mobile communication and wireless networks, and embedded soft-ware and systems. From 1999 to 2003 he was with the Computers and Communications Research Laboratories of the Industrial Technology Research Institute as a researcher. He is currently an associate professor in the Department of Computer Science at National Chiao Tung University. He was a visiting professor at the University of Waterloo, Cana-da, in the summer of 2007, and ETH Zurich, Switzerland, in the summer of 2010. He has published more than 75 inter-national journal and conference papers, and holds or has applied for 18 U.S. patents. He received the Young Engineer Award from the Chinese Institute of Electrical Engineering in 2007, the Outstanding Teaching Award of National Chiao Tung University, and the K. T. Li Outstanding Young Scholar Award from the ACM Taipei/Taiwan chapter in 2008.
CHIEN-MINGCHENG([email protected]) is currently a Ph.D. candidate in the Department of Computer Science at National Chiao Tung University (NCTU), Taiwan. He received his B.S. degree from NCTU and his M.S. degree from National Tsing Hua University, Taiwan, both in computer science. His current research interests focus on mobile peer-to-peer protocols and services.
Figure 5. Lookup and maintenance bandwidth usages for different approaches.
Vehicle density (vehicles/km)
2T-unstruct 1T-unstruct 2T-struct 1T-struct 2T-unstruct/ 2T-struct/VANET
1.8 3.6 5.5 7.3 9.1 10.9 1.8 3.6 5.5 7.3 9.1 10.9 1.8 3.6 5.5 7.3 9.1 10.9 1.8 3.6 5.5 7.3 9.1 10.9 1.8 3.6 5.5 7.3 9.1 10.9
50
0
P2P overlay bandwidth usage (b/s) V
ANET bandwidth usage (bit/s)
100 150 200 250 300 350 400 450 500 1500 1000 500 0 2000 2500 P2P lookup P2P maintenance IVC lookup