國 立 交 通 大 學
土 木 工 程 研 究 所
碩 士 論 文
應用專家系統於地下水模式參數檢定之研究
─以濁水溪沖積扇為例
Automatic Parameters Identification of
Groundwater Model using Expert System
- Case Study of Choshuihsi Alluvial Fan
研 究 生 : 王雲直
指導教授 : 張良正 博士
應用專家系統於地下水模式參數檢定之研究
─以濁水溪沖積扇為例
Automatic Parameters Identification of
Groundwater Model using Expert System
- Case Study of Choshuihsi Alluvial Fan
研
究 生:王雲直 Student:Yun C. Wang
指導教授:張良正
博士 Advisor:Dr. Liang C. Chang
國
立 交 通 大 學
土
木 工 程 學 系 碩 士 班
碩
士 論 文
A Thesis
Submitted to Department of Civil Engineering
National Chiao Tung University
in Partial Fulfillment of Requirements
for the Degree of
Master of Science
in
Civil Engineering
April 2010
Hsinchu, Taiwan, Republic of China
應用專家系統於地下水模式參數檢定之研究
─以濁水溪沖積扇為例
學生:王雲直 指導教授:張良正 博士 國立交通大學土木工程研究所摘要
傳統上地下水參數檢定可分為人工參數檢定與自動化參數檢定;人工 參數檢定之檢定過程需要人為方式決定參數值,其優點為所得之參數值較 可解釋且過程較彈性,惟缺點為費時且需有豐富的模擬經驗始能進行。自 動化參數檢定通常是結合地下水流模式與優選法,雖然可免去人工參數檢 定的繁瑣而有較高效率,但優選法須先建立嚴謹的優選模式,並且將構想 與經驗轉化為優選模式之目標函數與限制式,其轉換過程較複雜而抽象, 因而限制了其可應用的問題型態,且當模式維度提高時,計算複雜度將大 為提高。 有鑑於此,本研究整合地下水流模式與專家系統,發展自動化地下水 參數檢定系統,其能兼顧人工檢定的可解釋性與彈性及自動化參數檢定的 效率。此外為驗證系統之實用性,乃選定濁水溪沖積扇進行模式參數檢定 之實例應用,檢定之參數為穩態情形下的淨補注量或抽水量(Q)。結果顯 示,濁水溪沖積扇之淨補注量為每年12.41 億噸,淨抽水量為每年 12.75 億 噸,比較各種相關研究文獻,顯示此淨抽水量值應屬合理範圍。另外,分 析檢定後抽水量之空間分布,發現與土地利用所反映的可能用水狀況趨勢 一致。經再深入分析淨抽水量檢定過程發現,上、中游地區為模式主要補 注區,對整體地下水位影響較大,因此檢定初期主要在調整此兩地區之參 數值,接著下游區域才有較大幅變動,另外因上、中游易互相影響,所以需較多迭代次數,始能調整至合理值。下游地區因影響區域較小,且表層 鄰近定水頭邊界,下層阻水層較完整,所以可較快調整至合理值。 本研究經過實際案例之驗證後,證實本研究所開發之自動化地下水參 數檢定系統為一實際可行之參數檢定方法,且本系統因為使用規則式專家 系統為參數檢定之核心,因此僅需將有關地下水參數檢定相關之經驗或想 法,歸納成規則,即可應用於參數檢定上,而歸納之規則乃儲存於知識庫, 可方便增加累積,因此系統檢定參數的能力易於擴充。
Automatic Parameters Identification of
Groundwater Model using Expert System
–Case Study of Choshuihsi Alluvial Fan
Student:Yun-Chih Wang Advisor:Dr. Liang-Cheng Chang
Department of Civil Engineering National Chiao Tung University
Abstract
Conventional parameter identification for groundwater models can be classified into manual parameter identification and automatic parameter identification. Manual parameter identification requires manual decisions to define parameter values. The resulting parameter values can be interpreted, and this process is flexible. However, this method is time consuming and requires expert analysis. Conversely, automatic parameter identification is based on the optimization method, and is computationally efficient. This method represents concepts and experiences as objective functions and constraints. This correlation is complicated and abstract; the application of this method is often limited to complicated field problems. The computational loading of the optimization method increases significantly when the parameters dimension is large.
Based on previous discussion, this study integrates a rule-based expert system and a groundwater simulation model, MODFLOW 2000, to develop an automatic groundwater parameter identification system. The proposed model has the manual identification advantages of interpretability and flexibility as and the automatic identification advantage of efficiency. To demonstrate the capability of solving a large field problem, this study proposes a model to identify the parameters for a simulation of the Choshuihsi Alluvial Fan. This
study develops a steady state simulation model and estimates steady recharge rates. Results indicate that the total recharge of the Choshuihsi Alluvial Fan from rain and rivers is 1.241 billion metric tons, and its total pumping rate is 1.275 billion metric tons. These results are comparable to previous studies. Moreover, the spatial distribution of the pumping rate is consistent with the potential water use, or land use. An in-depth analysis shows that the upstream of the fan is the main recharge area, and affects the groundwater of whole alluvial fan. Hence, in the initial stages of identification, the system mainly modifies the parameters in the upstream area. Due to the interaction between upstream and midstream areas, the model required more iterations to obtain reasonable values for those areas. The downstream, coastal area has a Dirichlet boundary in the surface layer. The downstream aquiclude has greater coverage in lower layers, making it easier for the parameters to converge.
This field case study demonstrates the feasibility and capability of the proposed model. The expert system is the kernel to modify the parameters. Therefore, the model can increase its parameter identification capacity by adding new rules to the system.
謝誌
感謝吾師張良正教授對於本論文之指導及研究生涯中對學生工作態度 及學問研究之啟發,使學生受益匪淺。另承蒙口試委員 洪士林教授、江崇 榮副所長及蘇惠珍助理教授在口試前細心審閱學生的論文,並於口試期間 給予保貴之意見,使得本文更趨於完備,在此謹致衷心謝意。 另外必須在此特別感謝蔡瑞彬學長於研究期間全程參與及指導本論文 之撰寫,也感謝陳宇文學長、葉明生學長的鼎力相助,還有張老師研究室 所有成員的陪伴及互相幫助。最後感謝家人在精神上及經濟上的支持,讓 我得以順利取得碩士學位。目錄
摘要 ... i Abstract ... iii 謝誌 ... v 目錄 ... vi 表目錄 ... viii 圖目錄 ... ix 第一章 緒論 ... 1 1.1 前言 ... 1 1.2 研究目的 ... 2 1.3 文獻回顧 ... 2 第二章 研究步驟 ... 7 第三章 研究方法 ... 9 3.1 自動化地下水參數檢定系統架構 ... 9 3.2 專家系統介紹 ... 10 3.3 CLIPS 介紹 ... 11 第四章 自動化地下水參數檢定系統發展 ... 13 4.1 參數檢定流程 ... 13 4.2 地下水模式自動化參數檢定系統建置... 14 4.2.1 地下水模擬 ... 15 4.2.2 參數檢定專家系統建置 ... 15 4.2.3 專家系統前後處理器建置 ... 16 4.3 參數檢定知識擷取 ... 16 4.4 參數檢定規則說明 ... 17 4.4.1 參數檢定前之初始設定及定義說明 ... 184.4.2 參數檢定之推論 ... 19 4.4.3 輸出應為增加水量的情形解說 ... 20 4.4.4 輸出應為減少水量的情形解說 ... 20 4.4.5 調整量是否足夠說明 ... 21 第五章 參數檢定系統應用測試 ... 24 5.1 淨補注量與抽水量(Q)檢定測試案例說明 ... 24 5.2 淨補注量與抽水量(Q)檢定結果 ... 27 5.3 專家系統之推論解釋 ... 32 第六章 地下水參數檢定系統應用於濁水溪流域 ... 36 6.1 濁水溪沖積扇地下水數值模式建置 ... 36 6.2 濁水溪沖積扇地下水數值模式參數檢定結果 ... 47 6.3 綜合討論 ... 50 6.3.1 水平衡分析 ... 50 6.3.2 土地利用現況可能抽水量分布分析 ... 53 6.3.3 分區間交互影響特性分析 ... 56 6.3.4 專家系統之推論邏輯說明 ... 58 6.3.5 穩態模式之檢定結果討論 ... 64 第七章 結論與建議 ... 66 7.1 結論 ... 66 7.2 建議 ... 67 參考文獻 ... 68 附錄 A MODFLOW 簡介 ... 71 附錄 B 各觀測井之水力傳導係數資料 ... 76
表目錄
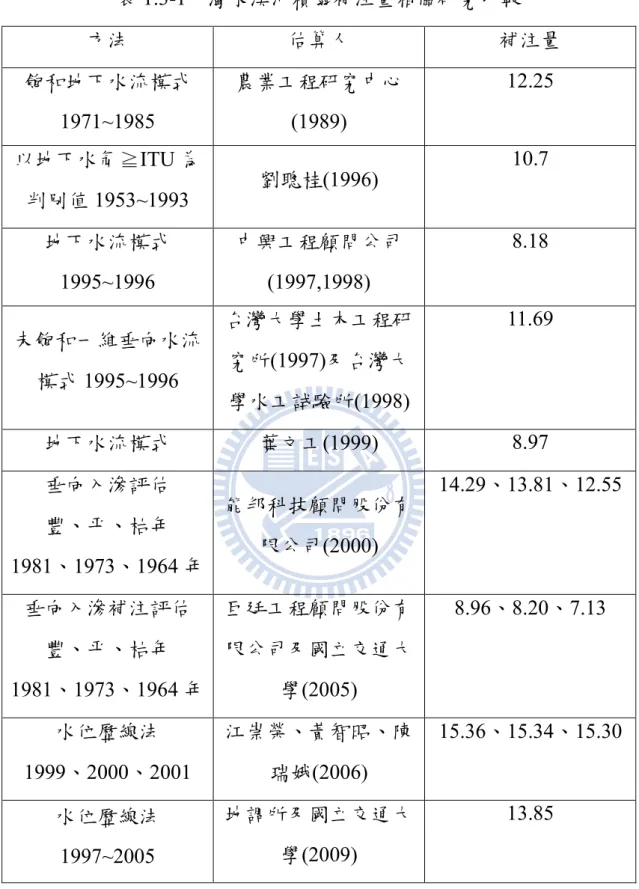
表1.3-1 濁水溪沖積扇補注量相關研究比較 ... 6
表5.2-1 含水層一完成參數檢定後之 Q 值(cmd)成果表及水位誤差(m) ... 29
圖目錄
圖2-1 研究步驟流程圖 ... 8 圖3.1-1 自動化地下水參數檢定系統架構圖 ... 10 圖4.1-1 參數檢定流程圖 ... 14 圖4.4-1 專家系統抽水量檢定推論鏈 ... 18 圖4.4-2 輸出為增加水量時之專家系統推論流程圖 ... 20 圖4.4-3 輸出為減少水量時之專家系統推論流程圖 ... 21 圖4.4-4 判定調整量縮小過快時之專家系統推論流程圖 ... 23 圖5.1-1 概念分層 ... 25 圖5.1-2 第一分層分區與邊界及 K 值(公尺/天)配置圖 ... 26 圖5.1-3 第二分層邊界及 K 值(公尺/天)配置圖 ... 26 圖5.1-4 第三分層分區與邊界及 K 值(公尺/天)配置圖 ... 27 圖5.2-1 全區水位均方根誤差之變化 ... 28 圖5.2-2 第一層之模擬水位與觀測水位等值圖 ... 30 圖5.2-3 第三層之模擬水位與觀測水位等值圖 ... 30 圖5.2-4 觀測水位對模擬水位之關係圖 ... 31 圖5.2-5 Q 值檢定過程 ... 32 圖5.3-1 分區 5 第 59~64 次調整之專家系統解釋 ... 35 圖6.1-1 地層柱狀圖分部位置 ... 37 圖6.1-2 濁水溪沖積扇水文地質架構概念分層 ... 38 圖6.1-3 濁水溪沖積扇地下水邊界之概念圖 ... 39 圖6.1-4 濁水溪沖積扇模式之格網劃分 ... 41 圖6.1-5 濁水溪沖積扇模式第 1 分層格網劃分 ... 42 圖6.1-6 濁水溪沖積扇模式第 2~7 分層格網劃分 ... 43圖6.1-7 濁水溪沖積扇模式第 49 列格網劃分剖面圖 ... 43 圖6.1-8 濁水溪沖積扇模式第 1 分層徐昇氏網格分區 ... 44 圖6.1-9 濁水溪沖積扇模式第 3 分層徐昇氏網格分區 ... 45 圖6.1-10 濁水溪沖積扇模式第 5 分層徐昇氏網格分區 ... 45 圖6.1-11 濁水溪沖積扇模式第 2 分層水力傳導係數分布 ... 46 圖6.1-12 濁水溪沖積扇模式第 4 分層水力傳導係數分布 ... 46 圖6.2-1 參數檢定過程之全區水位均方根誤差 ... 48 圖6.2-2 第一層觀測水位與檢定後模擬水位等值圖 ... 49 圖6.2-3 第三層觀測水位與檢定後模擬水位等值圖 ... 49 圖6.2-4 第五層觀測水位與檢定後模擬水位等值圖 ... 50 圖6.2-5 觀測水位與檢定後模擬水位關係圖 ... 50 圖6.3-1 檢定後第一層淨補注量分布情形 ... 51 圖6.3-2 檢定後第三層抽水量分布情形 ... 52 圖6.3-3 檢定後第五層抽水量分布情形 ... 52 圖6.3-4 第三層抽水較大區域與土地利用 ... 54 圖6.3-5 第五層抽水較大區域與土地利用 ... 54 圖6.3-6 第三層抽水較大區域與衛星地形圖 ... 55 圖6.3-7 第五層抽水較大區域與衛星地形圖 ... 55 圖6.3-8 放大漁塭地區之衛星地形圖 ... 56 圖6.3-9 Q 值檢定過程 ... 57 圖6.3-10 Q 值檢定過程 ... 58 圖6.3-11 六合(1)之第 72~78 次推論過程 ... 61 圖6.3-12 選定區域之第 50 次推論過程 ... 64
第一章
緒論
1.1 前言
台灣雨量雖然豐沛,約為世界平均值之 2.6 倍,但因地狹人稠,每人 每年所分配雨量僅及世界平均值之七分之一,且雨量在時間及空間上之分 佈極不均勻,五月至十月之雨量即佔全年之 78%,枯水期長達六個月,再 加上河川坡陡流急、腹地狹隘,逕流量被攔蓄利用的僅有177.54 億立方公 尺,約佔年總逕流量之 18%,其餘均奔流入海。因此若欲增加河川流量之 利用率,增建水工結構物攔蓄河川流量為一最直接之方法,惟近年來由於 環境保護意識高漲,加上原本地表水工結構物密度趨於飽和,使得此方法 並無法落實。幸而台灣除了地表水資源外,尚蘊含豐富之地下水資源,倘 若能善用地下水資源將可減緩台灣枯水期水資源之負擔,因此如何有效的 運用與管理地下水是一門重要的課題。 為了有效的運用與管理地下水資源,建立地下水模式分析地下水資源 相關資訊是常用的方法之一,而在建立模式過程中,參數檢定乃是必要的 步驟,而一般的參數檢定方法可分為人工參數檢定與自動參數檢定。人工 參數檢定在推估參數時,過程不但複雜、冗長、且需要花費許多時間,進 行檢定的人員除了需具備相關地下水知識外,亦須具有參數檢定之經驗與 技巧。此外,如何將一位專家的參數檢定知識轉移給其他需進行人工參數 檢定之人員也是相當不易。人工參數檢定雖有上述缺點,惟其在進行參數 推估時,參數的修正常存在至少是定性上的邏輯或經驗的判斷,檢定的過 程中人與模式的不斷互動,因此人工參數檢定雖然繁瑣且費時費工,但檢 定本身除了可對問題有更深入的了解外,檢定者若是一個有經驗的專家, 其結果往往較不易發生背離現地物理特性的情形。 自動化參數檢定則通常是將地下水模式結合優選法進行參數檢定,雖然可免去人工參數檢定的煩瑣,但須將想法與專家經驗轉化為目標函數與 限制式,當模式維度提高時,其轉化會變得相當不易。因此,本研究乃試 圖發展新的參數檢定方法,期能在保有自動化參數優選檢定的快速及方便 的同時,亦能保有人工參數檢定之彈性,並能累積整合專家之經驗,使得 參數檢定的工作更易進行。 此外,本研究將參數檢定系統應用在實際案例上,證明本系統之實用 性。在實際案例的選定上,主要是以台灣主要地下水區為對象,其中因為 濁水溪沖積扇的天然環境限制,使得濁水溪沖積扇所取用之水源,幾乎都 來自地下水,因此該地下水區的地下水資源管理格外的重要。再者,由於 經濟部中央地質調查所已於民國88 年完成「台灣地區地下水觀測網第一期 計畫濁水溪沖積扇水文地質調查研究報告」,對於濁水溪沖積扇之地層剖面 有詳細介紹。並於民國 82 年至 86 年間,在濁水溪沖積扇建置了完善的觀 測井網,至少記錄了十年以上詳盡的水位資料,因此就資料的完整度與密 度而言,該地下水區乃全國地下水區之冠。故本研究乃選定濁水溪沖積扇 進行地下水模式建置及參數檢定,並將參數檢定結果配合現地概況分析, 以驗證本系統之正確性與實用性。
1.2 研究目的
為解決人工參數檢定的繁瑣及優選法缺乏彈性的問題,本研究結合專 家系統與地下水模擬模式發展「自動化地下水參數檢定系統」,並將此系統 應用於濁水溪沖積扇,而後將模式檢定成果配合土地利用所反映之可能用 水概況進行分析,以驗證本系統之正確性與實用性。1.3 文獻回顧
在分析地下水相關問題時,往往都會先建立一個地下水模擬模式,再 以此模式為基礎作進一步分析。在使用地下水模式之前,必須先給定模式中之參數,但許多參數無法直接由現地量測而得到,而必須由歷史觀測資
料來推估(Yeh, 1985),這時則必須依據觀測資料再經由參數檢定的過程才能
推估得參數值。
人工參數檢定亦常用於檢定模式參數,惟其缺點為推估參數的過程複 雜而冗長,且需要花費許多時間。另外如何將專家的參數檢定知識轉移給
他人也是困難的過程(Madsen et al., 2001; Chau and Chen, 2001; Chau, 2004;
Chau, 2006)。為了解決人工檢定費時費工的問題,許多研究利用優選法進
行模式之自動參數檢定(Mazi, et al., 2004; Mazi, et al., 2000; Hill, et al.,
1992.),在電腦普及計算速度突飛猛進的現在,自動參數檢定則妥善利用此 優點,達到相較於人工率定省時省力的目的。然而,應用優選法於參數檢 定首先需確認並建立目標函數與限制式,相較於人工參數檢定,較不易將 新的想法直接帶入檢定,因此較缺乏彈性。 Boyle (2000)比較了水文模式之人工參數檢定及應用優選法之參數檢 定,並且合併兩種參數檢定方法以改善兩者之缺點。他比較人工參數檢定 與應用優選法之參數檢定所得到之結果,指出前者較能被水文學家所接 受,因為人工參數檢定之過程不僅可以被檢視,而且能幫助水文學家進行 結果分析。 有鑑於將專家之人工參數檢定的專業知識轉移給他人很困難,許多研
究皆應用專家系統協助進行參數檢定(Abbott, 1991; Chau and Chen, 2001;
Chau and Albermani, 2002, 2003; Chau, 2004; Kim, 2007)。專家系統是一個仿 有決策能力的人類專家之智慧型電腦系統,並且使用知識與推理的過程來 解決需要專業知識才能解決的問題。使用者可以透過與專家系統的互動介 面來描述問題,如此專家系統便能回答出一個有根據的答案。
應用專家系統協助使用者檢定參數已有一段時間,因為此系統可以將 檢定人員的個人因素減到最低,以保持參數檢定的一致性,讓初學者也可
以得到與專家的同樣結果(Chau, 2006)。Kim 等人於 2007 年使用專家系統 (Expert system for calibration of HSPF, HSPEXP) 協 助 檢 定 水 文 模 式 (Hydrologic Simulation Program Fortran, HSPF);Madsen 等人於 2002 年應用
專家系統幫助檢定降雨逕流模式;Chau 於 2003 年至 2004 年使用專家系統 協助檢定海岸及其相關模式。 上述專家系統協助參數檢定,皆需要使用者與系統互動,且大多數的 專家系統只建議需修改的參數及其可能範圍,系統本身並未直接更新參數 值,仍然需要使用者輸入改變。 陳韋圻於2008 年應用專家系統於地下水流模式,自動化檢定水力傳導 係數(K 值)及儲水係數(Sy 值),並由四種設計案例進行驗證,期望即使為地 下水模式參數檢定之初學者,其檢定結果亦可與專家檢定所得結果相近。 由於台灣地區地下水抽水量未有精確統計,因此抽水量對於地下水模 式建置而言為一未知變數,所以台灣地區的地下水模式檢定的對象往往包 含了抽水量(Q 值)、K 值及 S 值。本研究則延續陳韋圻(2008)之研究,發展 自動化抽水量檢定系統,並更進一步將檢定系統應用在濁水溪沖積扇,驗 證本系統之可行性與實用性。 而關於濁水溪沖積扇之相關地下水收支研究甚多,如劉聰桂(1996)利用 熱核爆氚示蹤方法評估地下水補注量;能邦科技(2000)、巨廷工程和交通大 學(2005)以一維垂向之溼地入滲係數和旱地降雨入滲率,評估地下水補注 量;台灣大學土木工程研究所(1997)、台灣大學水工試驗所(1998)以溼地及 旱地入滲串聯未飽和一維垂向地下水流模式評估地下水補注量;農業工程 研究中心(1989)、葉文工(1999)、中興工程(1997、1998)則利用二維多層地 下水流數值模式逆推地下水收支;江崇榮等人(2006)、地調所及交通大學 (2009)則以水位歷線法推估地下水補注及抽取;估得濁水溪沖積扇歷年來之 地下水補注量在8.1 億到 15.4 億之間,上述重要文獻數據整理至表 1.3-1。
由於各類文獻推估之方法與區域範圍不盡相同,使得補注量與抽水量
推估結果差距甚大,而在前述文獻中,以江崇榮等人(2006)之模擬範圍與本
研究最為一致,且該研究推估 1999~2001 連續三年的補注量及抽水量,因
表1.3-1 濁水溪沖積扇補注量相關研究比較 方法 估算人 補注量 飽和地下水流模式 1971~1985 農業工程研究中心 (1989) 12.25 以地下水氚≧ITU 為 判別值1953~1993 劉聰桂(1996) 10.7 地下水流模式 1995~1996 中興工程顧問公司 (1997,1998) 8.18 未飽和一維垂向水流 模式 1995~1996 台灣大學土木工程研 究所(1997)及台灣大 學水工試驗所(1998) 11.69 地下水流模式 葉文工(1999) 8.97 垂向入滲評估 豐、平、枯年 1981、1973、1964 年 能邦科技顧問股份有 限公司(2000) 14.29、13.81、12.55 垂向入滲補注評估 豐、平、枯年 1981、1973、1964 年 巨廷工程顧問股份有 限公司及國立交通大 學(2005) 8.96、8.20、7.13 水位歷線法 1999、2000、2001 江崇榮、黃智昭、陳 瑞娥(2006) 15.36、15.34、15.30 水位歷線法 1997~2005 地調所及國立交通大 學(2009) 13.85
第二章
研究步驟
本研究之研究步驟如圖 2-1 所示,第一階段為資料蒐集,蒐集內容主 要為地下水模擬與參數檢定之之文獻等資料,以及熟悉地下水模擬及參數 檢定之專家知識。完成資料蒐集之後,將歸納為參數檢定之相關規則。 第二階段為系統建置,此階段可分為地下水模式建置及地下水參數檢 定專家系統建置兩部分。在地下水模式建置部份,本研究採用 USGS(U.S.Geological Survey) 所開發之地下水模式 MODFLOW,此模式亦是目前最被廣
為使用之地下水模式之ㄧ, 其乃一使用有限差分法之三維地下水模式,可
模擬受壓及非受壓水層之穩態與非穩態流場,本研究所採用之版本為 MODFLOW-2000,有關 MODFLOW 其他介紹詳見附錄 A。在地下水參數
檢定專家系統建置部份,本研究採用美國太空總署強森太空中心(NASA’s
Johnson Space Center)所開發之 CLIPS(C Language Integrated Production System)建立地下水模式參數檢定專家系統。CLIPS 係一專家系統之開發工 具,提供了完整的環境讓使用者建立以規則推論為主之專家系統。 第三階段為系統測試,此階段應用地下水參數檢定專家系統進行參數 檢定,首先為系統案例檢定測試,其次為參數檢定測試結果分析。 第四階段為應用於實際案例,此階段將選取濁水溪沖積扇建立地下水 模式,之後再進行參數檢定。在濁水溪沖積扇之模式建置方面,本研究採 用用經濟部中央地質調查所於民國88 年完成之「台灣地區地下水觀測網第 一期計畫濁水溪沖積扇水文地質調查研究報告」,以濁水溪沖積扇 72 站地 層柱狀圖所繪製之水文地質剖面,劃分出濁水溪沖積扇概念分層再配合現 地資料,完成濁水溪地下水模式之建置。在參數檢定方面,本研究將以濁 水溪沖積扇觀測站網之水位資料為依據,應用地下水參數檢定專家系統進 行模式參數檢定,再對參數檢定結果進行分析。
資料蒐集 系統建置 系統測試 地下水模式建置 地下水參數檢定 專家系統建置 系統案例檢定測試 參數檢定測試結果 分析 地下水模擬與參數 檢定相關文獻蒐集 應用於 實際案例 應用專家系統進行 參數檢定 濁水溪地下水模式 建置 濁水溪 參數檢定結果分析 圖 2-1 研究步驟流程圖
第三章
研究方法
本 研 究 應 用 CLIPS 建置參數檢定專家系統並與地下水模擬模式 MODFLOW 整合,從而建立整個自動化地下水參數檢定系統。以下 3.1 節 將介紹系統架構,3.2 節與 3.3 節再分別介紹專家系統與 CLIPS。3.1 自動化地下水參數檢定系統架構
本研究發展之自動化地下水參數檢定系統係建立在 Linux 作業系統之 下,可分為參數檢定部分、地下水模擬部分以及專家系統前後處理器,圖 3.1-1 為自動化地下水參數檢定系統架構圖。 在參數檢定部份,本研究採用CLIPS 建立參數檢定之專家系統,此專 家系統為參數檢定之核心。本研究所建立之專家系統為規則式專家系統 (rule-based expert system),其透過推理機(inference engine)之推論機制並依據知識庫(knowledge base)中之規則(rules)推理出答案。
在地下水模擬部份,本研究選用 MODFLOW 做為此系統之地下水模擬
模式,MODFLOW 相關介紹詳見附錄 A。MODFLOW 進行地下水流模擬
後,將地下水位輸出成 ASCII 格式之檔案。
為 整 合 專 家 系 統 與 地 下 水 模 式 , 需 建 置 專 家 系 統 前 後 處 理 器 (Preprocessor and postprocessor)。專家系統前處理器之功能為將專家系統所 需之資訊匯整並傳送給專家系統推論核心,進行參數檢定分析。而專家系 統後處理器之功能為接收專家系統推論核心的輸出資訊,包含待檢定參數
及其修正量,再依據這些資訊,覆寫原本 MODFLOW 之輸入檔,供
MODFLOW 2000 專家系統 CLIPS 專家系統前 處理器 專家系統後 處理器 地下水模擬 模式 參數檢定 核心模組 IO處理介面 圖3.1-1 自動化地下水參數檢定系統架構圖
3.2 專家系統介紹
程序性之程式語言,如C 或 Fortran 語言,一般皆作為資料處理之用(如 數字或陣列之處理)。然而人類常使用抽象及象徵性的方法處理複雜的問 題,這種抽象及象徵性的方法往往不適用於程序性之程式語言。雖然抽象 的資訊仍然可用程序性之程式語言撰寫,但必須耗費大量的時間進行程式 編撰才足以描述這些抽象資訊,以轉換這些抽象資訊成為可以使用的格式。 近年來人工智慧領域的研究結果已經發展出可具體化抽象資訊的技 術,這項技術可讓程式表達得更接近人類邏輯,且更利於程式的發展與日 後之維護。上述的電腦程式即為專家系統,具有能夠模仿人類專家解決複 雜問題的能力。 Edward Feigenbaum 教授將專家系統定義為一個使用知識及推理過程 解決問題的智慧型電腦程式,且這樣的問題是需要大量專家知識才得以解 決的問題。也就是說,專家系統是一個模仿具有決策能力之人類專家的電 腦系統。專家系統係由知識庫(Knowledge Base)及推理引擎(Inference Engine)等
兩 個 主 要 元 件 所 組 成 。 由 規 則(Rules) 的 方 式 表 示 知 識 之 專 家 系 統
(Rule-based Expert System)是最常見的專家系統之一,這些儲存於知識庫中 之規則,用來表示數組相對於給定情況的反應。每條規則皆由條件部分 (conditional element)和動作部分(action element)所組成。條件部分為一系列
的條件敘述,若這部份的敘述和事實(facts)相符,則執行(fire)此規則之動作 部分。推理引擎會配對這些敘述與事實是否相符合,此過程稱為 patterns matching,每當規則的動作部分改變事實後,推理機便會再次執行 patterns matching 的動作,判斷哪些規則是可執行的,直到沒有任何條件部分的敘 述符合事實為止。 專家系統相較於程序性程式(如:C 或 Fortran 等)語言有很大的差異, 首先專家系統解題的知識與推論機制是分開的,而程序性程式設計則通常 會將資料與演算法交織在一起;此外在資料處理方面,專家系統偏向高度 交談式處理,而程序性程式設計則為批次順序處理;因此專家系統可以因 知識抽換而改變系統功能及行為或是強化解題模式與能力,而程序性程式 設計則需頻繁修改程式,相較之下專家系統適於應用在特定領域且維護和 擴充會較為方便。另外專家系統相較程序性程式語言,具有提供解釋推論 過程之能力,因此較易滿足人們的質疑,推論過程相較傳統程式也變得較 為透明。
3.3 CLIPS 介紹
CLIPS 是 C Language Integrated Production System 的縮寫,係由 NASA/Johnson Space Center 使用 C 程式語言所開發的工具。CLIPS 是一個 提供了完整的環境方便於建立專家系統的工具,其支援了三種不同的程式
編撰方法,分別為以規則為基礎(rule-based)、物件導向(object-oriented)及程
識可以表示成啟發式的敘述,以指定對特定的情況做出動作;物件導向 (Object-oriented)則是允許複雜的系統可以被拆解並模組化成數個元件,這 些元件可以再用於建立其他的系統或是其他元件;程序導向(Procedural)的 程式編撰方式則是類似其他程式語言的程式碼有順序性,如 C、Java 及 FORTRAN 等等。另外,CLIPS 可以嵌入至別的程式語言,或是被當作子 程式呼叫,以方便與其他程式語言做整合。 本研究採用以規則為基礎(rule-based)及物件導向(object-oriented)的知 識表示法建立專家系統。在以規則為基礎(Rule-based)的編撰方式上,本研 究將地下水模式參數檢定之知識歸納成數條規則,這些規則儲存於專家系 統之知識庫,透過 patterns matching 執行規則內之動作。而物件導向 (Object-oriented)的應用方面,本研究建立一個地下水類別,此類別中包含 與參數檢定相關的屬性,如淨補注量或抽水量、模擬水位與觀測水位誤差 等等,而此類別的實作則稱之為實例(instance),每個實例皆具有類別所擁 有的屬性。本研究以參數分區(Zonation)法降低參數檢定維度,並將一個參 數分區實作為一個實例(instance),以此概念作為地下水模式參數檢定之基 礎。
第四章
自動化地下水參數檢定系統發展
本章主旨在於說明地下水自動化參數檢定系統之參數檢定流程及系統 內部各個元件之建立,以下將分為四節說明。首先於 4.1 節說明本系統參 數檢定流程,其次 4.2 節為地下水模式自動化參數檢定系統建置,此部份 分為三小節,分別為地下水模擬部份、參數檢定專家系統建置及專家系統 前後處理器建置。接著於 4.3 節將說明抽水量檢定相關經驗,最後 4.4 節將 抽水量檢定相關經驗歸納成規則,並聯結成推論鏈。4.1 參數檢定流程
本系統之參數檢定流程如圖4.1-1 所示,在參數檢定開始後,系統首先 初始化參數值,即淨補注量及抽水量,並讀入相關參數的設定資訊,如分 區設定、觀測井位置、觀測水位等。 在 完 成 初 始 參 數 設 定 後 , 接 著 執 行 地 下 水 模 式 MODFLOW , MODFLOW 完成地下水流模擬後,將地下水位輸出成 ASCII 格式之檔案。 下一步則為專家系統前處理器判斷各分區之觀測水位與模擬水位之誤 差(以下稱為檢定誤差)是否均小於容許誤差。當有一分區之檢定誤差超過容 許誤差,專家系統前處理器則會取出各分區的相關資訊,包括水位高、淨 補注量或抽水量、模擬水位與觀測水位誤差以及上次參數檢定所得參數修 正量,然後傳入專家系統進行推論分析。 將所需資訊傳送至專家系統後,系統接下來會執行專家系統,專家系 統依據知識庫中之規則集合(rules),並搭配推理機(inference engine)之運 作,而推論出各區的參數修正量。 當各區待檢定之參數,由專家系統分析出修正量後,專家系統後處理 器再將各修正量依據MODFLOW 輸入檔格式,對 MODFLOW 輸入檔進行 更新。接著再次執行MODFLOW,計算出更新參數後的地下水位,再由專家 系統前處理器判斷各分區檢定誤差是否均小於容許誤差,若是則停止參數 檢定,若否則反覆執行上述步驟,直至所有分區檢定誤差均小於容許誤差。 開始參數檢定 初始化參數值與 設定模式參數檢定 相關資訊 執行地下水模式 MODFLOW 傳送相關資訊 至專家系統 專家系統對各區 進行參數修正 以修正值更新 MODFLOW輸入檔 各區檢定誤差 均小於容許誤差 是 停止參數檢定 否 圖 4.1-1 參數檢定流程圖
4.2 地下水模式自動化參數檢定系統建置
本研究之地下水模式自動化參數檢定系統可分為三個部份,分別為地 下水模擬、參數檢定專家系統建置及專家系統前後處理器建置,以下將分 別說明此三部份之設定及建置。
4.2.1 地下水模擬
本研究選用 MODFLOW 做為地下水模擬模式。MODFLOW 係由數個 套件(package)所組成,每個套件再由數個模組(module)所組成,使用者可依 所需功能選擇使用之套件,未被使用的套件則不啟動以節省電腦計算資源。本研究所建立之模式則使用了 discretization file (DIS)、zone array
(ZONE)、Basic Package (BAS)、Output Control Option (OC)、Layer Property Flow package (LPF)、Well Package (WEL)、Preconditioned Conjugate-Gradient Package (PCG)等七個套件。當 MODFLOW 執行時,MODFLOW 遂依據所 啟用之套件,讀取所相對應之輸入檔。
4.2.2 參數檢定專家系統建置
專家系統乃一模仿人類專家且具有決策能力的智慧型電腦系統,本研
究採用CLIPS(C Language Integrated Production System)建立地下水模式參
數檢定專家系統,CLIPS 乃一方便採用物件導向概念,用以建立專家系統 之工具。在本研究中,地下水模式以分區為概念進行參數檢定,一個分區 即為一個物件,在 CLIPS 中則以建立實例(instance)的方式應用物件導向概 念。在每個實例(物件)中,則有若干屬性(slot)代表各分區的特性,如 K 值、 所在分層、淨補注量或抽水量、模擬水位與觀測水位誤差及各種參數調整 依據。研究所建立之專家系統,乃將熟悉地下水模式參數檢定之人類專家 所具有之經驗及知識轉換成規則(Rule)並將之存放於知識庫(Knowledge Base),當專家系統對地下水模式進行參數檢定時,專家系統依據所輸入之 情況並透過推理機(Inference Engine)對知識庫內之規則進行規則推論(Rule
Inference),其推理結果即為所輸入問題之答案。
4.2.3 專家系統前後處理器建置
為了讓專家系統與MODFLOW 進行溝通,本研究使用 C++ 程式語言 為平台,建立專家系統與MODFLOW 的溝通橋樑,此即為專家系統前後處 理器。 專家系統前處理器的主要功能可分為兩個部份,第一個功能為讀取專 家系統所需之資訊:前處理器將MODFLOW 計算出的模擬水位進行處理, 取出所需的水位資訊,並且從執行MODFLOW 所需的各種輸入檔中,讀取 模式的相關資訊,匯整後傳入專家系統進行參數檢定。第二個功能為分析 各分區是否滿足收斂標準;前處理器分析各分區模擬水位與觀測水位的誤 差是否都在容許誤差內,若超出容許誤差,則重新啟動MODFLOW,若小 於容許誤差標準,則停止參數檢定,並結束程式。 專家系統後處理器的主要功能為,依據專家系統檢定後的修正值,更 新MODFLOW 的輸入檔。4.3 參數檢定知識擷取
在建立專家系統之前,必須先擷取參數檢定之經驗及知識。由於本研 究室之研究團隊,在地下水檢定方面已有相當多研究,相關經驗豐富,因 此與研究團隊之學長以及指導教授進行訪談及討論,之後再依據討論結 果,歸納出以下幾點概念: 1. 一般地下水流模式中,由於受到流線的影響,使得上游進行調整 時,會對下游影響較大;而下游進行調整時,對上游影響較小。因 此模式大多會從上游開始往下游調整。 2. 在多層地下水模式檢定中,由於表層補注量的大小對於下層含水層 抽水量有顯著的影響,因此進行人工檢定時,通常會先進行表層抽水/(補注)量檢定,再依序往下層進行抽水量檢定。 3. 在人工檢定地下水模式時,通常會以迭代方式來回調整各分區參 數,使各區之檢定誤差逐漸縮小。 基於上述概念,本研究經由反覆測試,將其歸納成更具體的參數調整 原則,詳細說明如下所示: 1. 在進行參數調整前,各分區應先設定初始修正量(ΔQ),作為參數調 整幅度之基準。 2. 開始調整時,需判別修正方向。當觀測水位大於模擬水位時,往正 方向調整,即增加水量;當觀測水位小於模擬水位時,往負方向調 整,此時應減少水量。 3. 判別修正方向後,接著應判斷修正量,其判斷方法為比較本次檢定 與上次檢定時之修正方向。若修正方向相同,表示參數修正持續向 同方向進行,則修正量不變;若修正方向相反,表示參數調整震盪, 則修正量減半。 4. 經多次調整後,參數修正量會逐漸縮小,然而因多分區同時進行調 整,各分區會受相鄰分區影響,可能使得調整量縮小過快,造成檢 定速度趨緩,因此當檢定速度過慢時,各分區調整量設定為同時放 大一定倍數。
4.4 參數檢定規則說明
本研究將上述抽水量檢定相關經驗,歸納成 10 條規則,再由這 10 條 規則連接成推論鏈,並儲存於知識庫中,此推論鏈為前向鏈結(Forward Chaining),主要由水位演繹出修正量,其推論鏈如圖 4.4-1 所示。該分區是否 位於第一層 該分區 是否已抽乾 該分區是否 為下層補注 系統參數 修正量是否足夠 (第一次調整判斷為 「是」) 觀測水位> 模擬水位 是 否 否 否 是 否 是 否 是 是 修正量需放大 ΔQn方向為- ΔQn方向為+ 接收 MODFLOW 模擬後 相關資訊 Rule calibrating_adjust Rule belonging Rule first_dry Rule below_sink Rule calibrating_direction 圖4.4-1 專家系統抽水量檢定推論鏈
4.4.1 參數檢定前之初始設定及定義說明
首先,專家系統在進行初次檢定時,會先設定各分區參數調整量ΔQ。 之後每次參數調整,ΔQ 都會根據規則進行調整,並儲存起來作為下一次參數調整之參考。各分區均有自己的ΔQ,根據規則進行調整,不受其它分 區影響。此外,每次進行推論會得出一個ΔQ 之外,還會獲得一個正號或 負號。正號即代表該區的實際的水量應比現在要多,因此需增加水量,所 以將現在的抽水量(或補注量)Qn 加上所推論出的ΔQn,而獲得新的抽水量 (或補注量)Qn+1,如式 4.1。反之亦然,負號即代表該區的水量應比現在要 少,因此需減少水量,所以將現在的抽水量或補注量Qn減去所推論出的Δ Qn,而獲得新的抽水量或補注量Q n+1,如式4.2。 Qn+1 =Qn +∆Qn (4.1) Qn+1 =Qn −∆Qn (4.2)
4.4.2 參數檢定之推論
本參數檢定系統由10 條規則連接,形成一個推論鏈。推論鏈首先判斷 參數調整量是否足夠,此部分將在 4.4.5 節進一步說明。若為第一次調整 時,則直接給予參數調整量足夠的判定。接著判斷該分區是否位於第一層。 若是在第一層,則判斷該分區是否抽乾。若不在第一層(即在下層),則判斷 該分區是否為下層補注。當該分區位於第一層且為抽乾的狀態,即代表該 分區的儲水量太少,所以判定本次調整輸出的ΔQn為〝+〞。若該分區位於 下層且為下層補注的狀態,則不符合一般物理特性,下層不應有補注來源, 判定本次調整輸出的ΔQn為〝-〞,讓該分區變回抽水的狀態。 當推論鏈前兩個判斷的結果為,該分區位於第一層且未抽乾或該分區 位於下層且為抽水的狀態,則表示該分區為正常狀態,可繼續判斷該區Δ Qn的正負號,其判斷方式為,當該分區的觀測水位大於模擬水位,代表該 分區水量不夠多,因此判定輸出的ΔQn為〝+〞。當該分區的觀測水位小於 模擬水位,代表該分區水量太多,因此判定輸出的ΔQn為〝-〞。 在判定正負號後,接著將判斷調整量,然後輸出結果,其中調整量將於4.4.3 與 4.4.4 節說明。
4.4.3 輸出應為增加水量的情形解說
當判定調整量為增加水量(即ΔQ n為〝+〞)後,其接續之專家系統推論 鏈如圖4.4-2,會先判斷上次輸出ΔQ n-1是否為〝+〞。若上次輸出的ΔQ n-1 為〝+〞,則不需調整ΔQn的量,因此ΔQn = ΔQn-1。若ΔQn-1為〝-〞,則 再判斷ΔQn的值,若該值大於 10-8(m/day),則ΔQn = ΔQn-1/2;若該值小 於10-8(m/day),表示現在ΔQ 值已經趨近於 0,所以令ΔQ 不變,則ΔQn = ΔQn-1。第 n+1 次之抽水量即為 Q n+1 =Q n +ΔQ n。 ΔQn-1方向為+ ΔQn-1≦10-8 (m/day) ΔQn= ΔQn-1/2 ΔQn= ΔQn-1 ΔQn= ΔQn-1 是 否 否 是 ΔQn方向為+ Rule calibrating_plus_correction Rule posi_min_deltQ 圖4.4-2 輸出為增加水量時之專家系統推論流程圖4.4.4 輸出應為減少水量的情形解說
當判定調整為減少水量(即ΔQ n為〝-〞)後,其接續之專家系統推論鏈 如圖4.4-3,判斷方式與上一小節相似,首先為判斷上次輸出ΔQ n-1的正負 號。若上次輸出的ΔQ n-1為〝-〞,則不需調整ΔQn的量,因此ΔQn = ΔQn-1。 若上次輸出ΔQ n-1為〝+〞,則再判斷ΔQ n-1的值,若該值大於 10-8(m/day), 則ΔQn = ΔQn-1/2;若該值小於 10-8(m/day),表示現在ΔQ 值已經趨近於 0, 所以令ΔQ 不變,則ΔQn =ΔQn-1。第 n+1 次之抽水量即為 Q n+1 =Qn +ΔQn。 ΔQn-1方向為+ ΔQn-1≦10-8 (m/day) ΔQn= ΔQn-1 ΔQn= ΔQn-1/2 ΔQn= ΔQn-1 否 是 否 ΔQn方向為 -是 Rule calibrating_minus_correction Rule negi_min_deltQ 圖4.4-3 輸出為減少水量時之專家系統推論流程圖
4.4.5 調整量是否足夠說明
當第一次檢定結束後,後續檢定進行時,推論鏈中參數調整量是否足 夠的判定將依據公式4.3 進行判斷。η ε ε ε − − = ) max( ) max( ) max( 1 n n n (4.3) 上式中之εn表示第 n 次調整前之檢定誤差(觀測水位與模擬水位誤 差),若有 k 個分區,則有 k 個誤差,如ε =n {ε1n,ε2n,,εkn},所以max(εn)即 為第 n 次調整前之所有分區最大誤差,而η即表示誤差改變率。當η小於 200 1 且所有分區尚未完成檢定,表示調整量縮小過快,檢定速度趨緩,判 定系統參數調量不夠。若η大於 200 1 ,則表示參數調整幅度仍然足夠。 當抽水量過小時,對於模擬水位將無顯著之影響,若檢定誤差仍大, 則系統可能無法完成收斂,因此當此情況發生時,本研究將直接把抽水量 放大五倍,以使得抽水量檢定得以進行。相關流程說明如下: 當調整量過小(η< 2001 ),其接續之專家系統推論鏈如圖 4.4-4,首先 判斷ΔQn 的正負號。當該分區的觀測水位大於模擬水位,則判定ΔQn 為 〝+〞;當該分區的觀測水位小於模擬水位,判定ΔQn為〝-〞。判斷正負號 後,再輸出上次ΔQn-1乘以五的值,所以ΔQn = ΔQn-1×5,第 n+1 次之抽水 量即為Q n+1 =Q n ±ΔQ n。
觀測水位> 模擬水位 ΔQn= ΔQn-1*5 ΔQn= ΔQn-1*5 否 是 修正量需放大 ΔQn方向為+ ΔQn方向為 -Rule calibrating_increase 圖4.4-4 判定調整量縮小過快時之專家系統推論流程圖
第五章
參數檢定系統應用測試
前述地下水參數檢定系統,將透過以下簡例初步檢驗本參數檢定系統 之正確性,其中將針對淨補注量及抽水量(Q)進行檢驗。 本研究在案例測試上分為兩步驟進行,第一步驟為建立一真值系統, 此步驟首先需建立一完整地下水模式,包括設定模式網格大小及數目、含 水層型態(受壓或非受壓)、含水層層數、邊界條件(定水頭邊界或不透水邊 界)、含水層頂及底之高程、時間單位、穩態或暫態模擬、初始水頭、觀測 井位置、水力傳導係數 K 值及抽水井位置與抽水量等。第二步驟則為建立 待檢定案例,此步驟所建立之地下水模式,除了待檢定參數(Q)之外,其餘 設定皆與真值系統一致,而此待檢定案例所需之觀測水位,則採用真值系 統於觀測井位置處之地下水位,另外,真值系統之淨補注量及抽水量(Q), 即為待檢定參數(Q)之目標值。 若各區模擬水位與觀測水位之誤差小於收斂標準則視為完成參數檢 定,系統不再調整參數。5.1 淨補注量與抽水量(Q)檢定測試案例說明
本案例目的為驗證檢定淨補注量與抽水量(Q)相關規則的正確性。本案 例為穩態模擬,模擬區域為 11000 公尺見方,區域內每個網格之長與寬皆 為 1000 公尺,而區域內之含水層層數共分為 3 層,如圖 5.1-1 所示,第一 層及第三層為含水層,第二層為阻水層。其含水層型態,第一層為非受壓水層(Unconfined aquifer),第二、三層為受壓層(Confined aquifer)。總計區
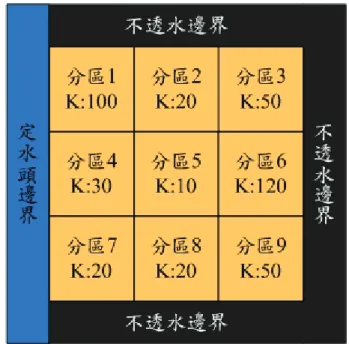
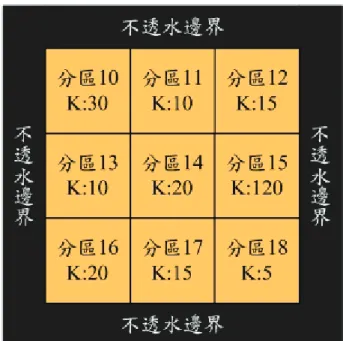
定水頭 邊界 第一分層 第二分層 第三分層 含水層1 含水層2 阻水層1 圖5.1-1 概念分層 在邊界條件方面,第一分層的左邊界設定為定水頭邊界且水位高在 0 公尺,右方、上方及下方為不透水邊界;第二、三分層四個方向均為不透 水邊界;在分區方面,本案例在第一層及第三層均分為9 個分區,共有 18 個分區,每個分區內皆為9 個網格,如圖 5.1-2 及圖 5.1-4 所示。 在地表高程方面,地勢由右向左下降,由右方邊界高程之 120 公尺降 至左方邊界之 0 公尺處。含水層厚度為 25~60 公尺不等,阻水層厚度約為 5 公尺。 在參數設定方面,整體模擬區域初始水位高皆為 100 公尺,而各分層 之 K 值設定如圖 5.1-2、圖 5.1-3、圖 5.1-4 所示,為一非均質分布之含水層。 Q 值之目標值與待檢定案例之初始值如表 5.1-1 與表 5.1-2 所示。在初始抽 水量的給定上,第一分層為每平方公里補注 4000cmd,第三分層為每平方 公里抽水 2000cmd。本案例所設定之容許之誤差值為 0.1 公尺水位高。
圖5.1-2 第一分層分區與邊界及 K 值(公尺/天)配置圖
圖5.1-4 第三分層分區與邊界及 K 值(公尺/天)配置圖
5.2 淨補注量與抽水量(Q)檢定結果
表 5.2-1 及表 5.2-2 說明含水層一與含水層二之參數檢定成果,由表中 之檢定後 Q 值與目標值以及檢定誤差(觀測水位與模擬水位之差值)兩者皆 差距甚小可知,本研究「淨補注量與抽水量調整規則」之設計為可行。圖 5.2-1 為參數檢定過程中全區水位均方根誤差之變化情況,其計算公式如公 式5.1 所示。 ( ) log( 1 ) 2 n RMSE LOG n k k∑
= = ε (5.1) 其中ε為觀測水位與模擬水位之誤差,k 為分區編號。由圖可知,全 區之水位均方根誤差大致上隨著調整次數增加而逐漸下降,然過程中,因 部份網格抽乾,使得均方根誤差忽然急遽放大,此乃因 MODFLOW-2000 在網格抽乾時,該網格會轉為不透水網格,因此給予該網格之補注或抽水 也同時消失,自然影響四周網格之水位,而轉為不透水之網格可自行設定 一水位値以表示該網格抽乾,本研究設定該值為-888,故計算後之均方根 誤差急劇上升。在經過 109 次調整後,全區水位均方根誤差降至 0.038 公尺,而各區水位之檢定誤差皆小於容忍誤差0.1 公尺。 -1.5 -1 -0.5 0 0.5 1 1.5 2 2.5 3 0 20 40 60 80 100 調整次數 L O G (R M SE ) 圖5.2-1 全區水位均方根誤差之變化
表 5.2-1 含水層一完成參數檢定後之 Q 值(cmd)成果表及水位誤差(m) 分區 目標值 Q 初始值Q 檢定後Q 檢定誤差 1 1500 4000 1568 0.0315 2 -4500 4000 -4521 -0.0126 3 4000 4000 4011 0.0107 4 -6000 4000 -6013 0.00084 5 -4000 4000 -3999 -0.00686 6 25000 4000 24970 -0.00932 7 -4500 4000 -4482 0.0147 8 -1500 4000 -1514 -0.0245 9 6000 4000 6006 0.00443 表 5.2-2 含水層二完成參數檢定後之 Q 值(cmd)成果表及水位誤差(m) 分區 目標值 Q 初始值Q 檢定後Q 檢定誤差 10 -2000 -2000 -1983 0.0561 11 -1000 -2000 -1031 -0.0815 12 -500 -2000 -469 0.0989 13 -1700 -2000 -1711 -0.0118 14 -1500 -2000 -1484 0.00993 15 0 -2000 -0.031 -0.00925 16 -1500 -2000 -1491 0.0198 17 -1000 -2000 -1015 -0.0532 18 -500 -2000 -495 0.0164 圖 5.2-2 及圖 5.2-3 分別為第一層及第三層之模擬水位與觀測水位等值 圖。圖中先以藍線畫上觀測水位,再以咖啡色線畫上參數檢定後之模擬水 位,由圖所示,檢定後模擬水位幾乎重疊在觀測水位上。圖5.2-4 為觀測水 位對模擬水位之關係圖,由圖所示,關係點幾乎位於x = y 的線上。如此證 明本研究之規則設計,可讓檢定後模擬水位符合實際觀測水位。
圖5.2-2 第一層之模擬水位與觀測水位等值圖
觀測水位與模擬水位 0 20 40 60 80 100 0 20 40 60 80 100 觀測水位 模擬水位 圖 5.2-4 觀測水位對模擬水位之關係圖 最後由 Q 值檢定過程來觀察本系統各分區之檢定情形。因為分區數很 多,不易觀察,所以從其中選出幾區進行比較,選取區域分別為分區 3、 分區5、分區 7、分區 12、分區 14、分區 10,這些區域分別代表第一層之 上、中、下游及第三層之上、中、下游。經作圖比較,如圖5.2-5 所示,可 發現位多數位於第一層之 Q 值會較快修正至一定值,部分受主要補注區影 響較大的區域,在剛開始變動劇烈,而位於下層受上層補注影響較大的區 域,須歷經較多次檢定才能調整至合理值。
Q值檢定過程 -7000 -5000 -3000 -1000 1000 3000 5000 7000 9000 0 20 40 60 80 100 調整次數 Q (c m d ) zone3 zone5 zone7 zone12 zone14 zone10 圖 5.2-5 Q 值檢定過程
5.3 專家系統之推論解釋
由於專家系統有提供推論過程解釋之能力,使得解題之結果,均可追 溯其決策過程,讓使用者能清楚了解答案的來龍去脈。而從以上全區均方 根誤差以及 Q 值檢定過程可發現,在第 59 至 64 次之調整,其不論是全區 均方根誤差或 Q 值之調整幅度均有大幅度變動,因此將選定分區 5 之第 59 至64 次調整,輸出專家系統之推論解釋,如圖 5.3-1 所示。 其中 iteration 為調整次數,sim_head 為模擬水位。於每次調整時,都 會先啟動(FIRE)規則 initialization,此為參數初始化規則,接著即正式進入 抽水量調整規則,其所啟動(FIRE)之規則與所對應之動作可參考第四章之 圖4.4-1、圖 4.4-2、圖 4.4-3 及圖 4.4-4。由以上推論過程依據推論鍊圖可知, 第59 次調整方向為負,調整量不變;第 60 及 61 次調整方向均為負,且兩 次調整量均放五倍,由此可知調整量及誤差突然大幅增加之原因為連續兩次修正量需放大,因此調整量連續乘以五,調整量放大 25 倍,而剛好使模 式第一層網格抽乾,使得模式誤差大幅度改變。而至第 62 次調整,由於網 格抽乾且上次調整方向為負,因此這次方向為正,調整量減半。之後仍持 續依規則調整,第 63 次調整方向為正,調整量不變;第 64 次調整方向為 負,調整量減半。此推論過程可看出,系統於誤差改變率低於設定門檻時 放大修正量,然經過幾次調整後,修正量仍會再逐漸變小,讓最終答案趨 近合理值。 iteration: 59 z: 1 x: 6 y: 6 sim_head: 43.5171
FIRE 1 initialization: [thefact] FIRE 11 calibrating_adjust: [thefact] FIRE 12 belonging: [thefact]
FIRE 13 first_dry: [thefact]
FIRE 14 calibrating_direction: [thefact]
FIRE 15 calibrating_minus_correction: [thefact]
MSG >> put-modified_q ED:2 (<Instance-thefact> -30.517578125) MSG << put-modified_q ED:2 (<Instance-thefact> -30.517578125) iteration: 60 z: 1 x: 6 y: 6
sim_head: 43.4679
FIRE 1 initialization: [thefact] FIRE 11 calibrating_adjust: [thefact] FIRE 12 calibrating_increase: [thefact]
MSG >> put-modified_q ED:2 (<Instance-thefact> -152.587890625) MSG << put-modified_q ED:2 (<Instance-thefact> -152.587890625) iteration: 61 z: 1 x: 6 y: 6
sim_head: 45.4063
FIRE 1 initialization: [thefact] FIRE 11 calibrating_adjust: [thefact]
FIRE 12 calibrating_increase: [thefact]
MSG >> put-modified_q ED:2 (<Instance-thefact> -762.939453125) MSG << put-modified_q ED:2 (<Instance-thefact> -762.939453125) iteration: 62 z: 1 x: 6 y: 6
sim_head: -888
FIRE 1 initialization: [thefact] FIRE 11 calibrating_adjust: [thefact] FIRE 12 belonging: [thefact]
FIRE 13 first_dry: [thefact]
FIRE 14 calibrating_direction: [thefact] FIRE 15 calibrating_plus_correction: [thefact] FIRE 16 posi_min_deltQ: [thefact]
MSG >> put-modified_q ED:2 (<Instance-thefact> 381.4697265625) MSG << put-modified_q ED:2 (<Instance-thefact> 381.4697265625) iteration: 63 z: 1 x: 6 y: 6
sim_head: 35.3825
FIRE 1 initialization: [thefact] FIRE 12 calibrating_adjust: [thefact] FIRE 13 belonging: [thefact]
FIRE 14 first_dry: [thefact]
FIRE 15 calibrating_direction: [thefact] FIRE 16 calibrating_plus_correction: [thefact]
MSG >> put-modified_q ED:2 (<Instance-thefact> 381.4697265625) MSG << put-modified_q ED:2 (<Instance-thefact> 381.4697265625) iteration: 64 z: 1 x: 6 y: 6
sim_head: 45.4063
FIRE 1 initialization: [thefact] FIRE 11 calibrating_adjust: [thefact] FIRE 12 belonging: [thefact]
FIRE 14 calibrating_direction: [thefact]
FIRE 15 calibrating_minus_correction: [thefact] FIRE 16 negi_min_deltQ: [thefact]
MSG >> put-modified_q ED:2 (<Instance-thefact> -190.73486328125) MSG << put-modified_q ED:2 (<Instance-thefact> -190.73486328125)
第六章
地下水參數檢定系統應用於濁水溪流域
本地下水參數檢定系統,經過簡例測試後,初步證實本系統之適用性 及正確性。接著為了證明本系統可應用在實際案例上,將建置濁水溪沖積 扇地下水模式,並檢定濁水溪沖積扇之淨補注量及抽水量。本章將先說明 濁水溪沖積扇地下水模式之建置,再進行參數檢定,並在成果分析部份配 合土地利用所反映之可能用水概況進行分析,以檢驗模式與檢定結果之正 確性。6.1 濁水溪沖積扇地下水數值模式建置
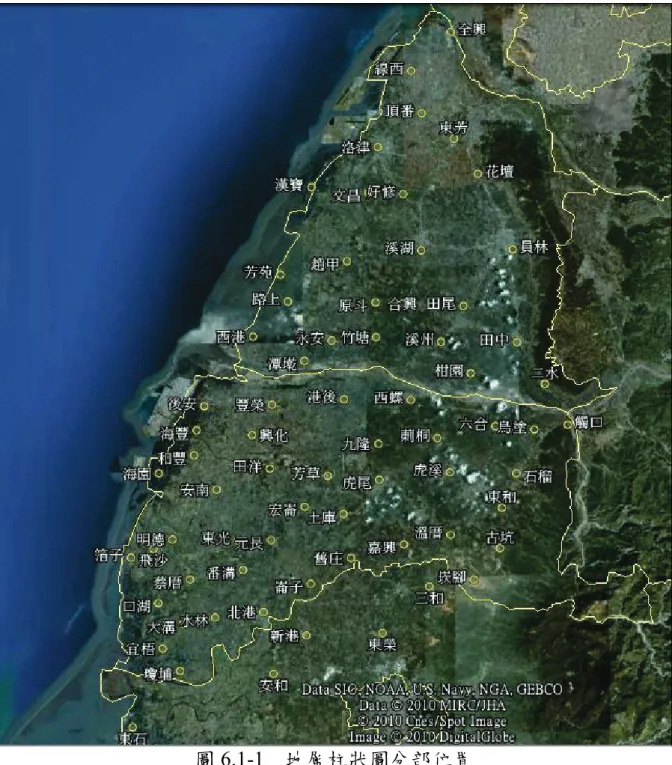
(一) 邊界條件與格網劃分 1. 地下分層架構 MODFLOW 模擬的設定上,可將地下分層設定為受壓或非受壓含水 層,並需輸入各分層之上部和底部之高程值。經濟部中央地質調查所於民 國88 年完成之「台灣地區地下水觀測網第一期計畫濁水溪沖積扇水文地質 調查研究報告」中,記錄位於濁水溪沖積扇 72 站之地層柱狀圖,其分布位 置如圖6.1-1 所示,並完成平原地區水文地質剖面一至十二(深度至 300 公 尺左右),再依據丘陵及河谷區之8 站地層柱狀圖,繪製水文地質剖面十三 至十五(深度約達 250 公尺左右),劃分出濁水溪沖積扇概念分層,依深度 分別為含水層一、阻水層一、含水層二、阻水層二、含水層三、阻水層三 及含水層四,濁水溪沖積扇模式共分為第一至七分層,如圖6.1-2 所示。海 第一分層 第二分層 第三分層 第四分層 第五分層 第六分層 第七分層 模式概念分層 水 文 地 質 架 構 含水層1 含水層2 含水層3 含水層4 阻水層1 阻水層2 阻水層3 海岸 山麓 圖6.1-2 濁水溪沖積扇水文地質架構概念分層 2. 模式邊界條件 根據中央地質調查所(1999)對於濁水溪沖積扇地下水邊界分析研判,提 出概念性之邊界,如圖6.1-3。
圖6.1-3 濁水溪沖積扇地下水邊界之概念圖 a. AB 段 位於車籠埔斷層上,斷層以東除河床表層厚約 10 公尺之河道沉積礫石 層有地下水伏流以外,均為透水及含水不佳之砂頁岩,屬於零流邊界(No flow boundary);惟位於此邊界上之濁水溪和清水溪河床伏流水量相當可 觀,為側向補注入地下水區之點源(Pointsource)。 b. BC 段 本邊界位於濁水溪沖積扇之南側邊緣上,含水層沉積物粒徑及厚度均 顯著變小,然而並未尖滅,因此無實體之阻隔為界,然而從地下水流網分 布型態,顯示BC 段與地下水流線大致平行,於本身即可認定為一條流線, 故亦屬於零流邊界。海岸附近之洩降錐,其在邊界南北之形狀及大小若相
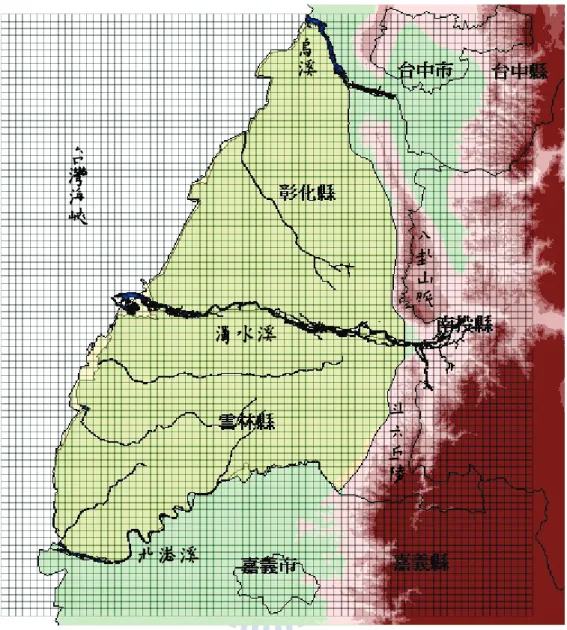
當,則不影響零流邊界之假設。 c. CD 段 此段為含水層尖滅封閉於阻水層之位置,屬於零流邊界。 d. DEF 段 本段與BC 段相似,含水層可向北延伸而與台中盆地地下水系統相接, 缺乏實體之阻隔,惟與地下水流方向大致平行,故認定為零流邊界。EF 段 位於和美沖積扇頂上,河水可由河床入滲補注地下水。 e. FG 段 本段邊界大致與地下水等水位線平行,隨時間之不同水位有昇降變化。 f. GA 段 本段位於頭嵙山層之中,為八卦山台地之地下水分水線(Groundwater divide)。 3. 格網劃分 模式格網以 1 公里乘 1 公里之格網建構,所以每一層格網為南北方向 85 列與東西方向 75 行,共七層格網。如圖 6.1-4 所示,淺黃色區域為模擬 範圍:
圖 6.1-4 濁水溪沖積扇模式之格網劃分 並且由上述邊界條件,在 MODFLOW 模式中設定,東部之八卦山地區 有八卦山背斜,斗六丘陵有內林背斜及斷層經過,以此為東邊邊界,且設 為零流量之邊界條件。北部邊界為烏溪,南部邊界為北港溪,各層皆為零 流量之邊界。西邊含水層一以海岸線向外延伸1 公里設為定水頭邊界(如圖 6.1-5 所示),其餘含水層延伸 5 公里後尖滅,設為零流量之邊界條件(如圖 6.1-6 所示)。圖中藍色網格為定水頭邊界,灰色網格為零流量。圖 6.1-7 所 示為第49 列剖面圖,水平向長度為垂向長度 30 倍。 八 卦 山 脈 斗 六 丘 陵 台 灣 海 峽 烏 溪 北港溪 濁水溪
圖6.1-5 濁水溪沖積扇模式第 1 分層格網劃分 定 水 頭 零 流 量 零 流 量
圖6.1-6 濁水溪沖積扇模式第 2~7 分層格網劃分 圖6.1-7 濁水溪沖積扇模式第 49 列格網劃分剖面圖 (二) 模式之輸入資料 模式之輸入資料包括水力傳導係數、垂向水力傳導係數、儲水係數、 起始地下水水位、補注量及抽水量等。以下將以濁水溪沖積扇為例,說明 MODFLOW 模式所需模式架構之地下水力學參數及源匯項輸入資料。各輸 入資料敘述如下: 第49 列 零 流 量 零 零 流 量 台灣海峽 南投縣 第1 分層 第3 分層 第5 分層 第7 分層 水平向每格為 1 公里 海 岸 線 流 量
1. 水力傳導係數 觀測站網建置時,各觀測井必進行單井或複井抽水試驗,因此分析所 得各含水層之水力傳導係數相當多,故後續以觀測站位置及資料為依據, 進行徐昇氏法分區,同一分區內水力傳導係數相同,圖 6.1-8~圖 6.1-10 分 別為模式第1、3 及 5 分層之水力傳導係數分區圖,有關各觀測站之水力傳 導係數詳見附錄B。而模式第 2、4 分層在下游部份為阻水層,其阻水層水
力傳導係數參考Schwartz and Zhang (2003),設定為 4×10-3 (公尺/天),並且
從中游開始,水力傳導係數逐漸變大,到上游部份,水力傳導係數則與含
水層相當,其分布如圖6.1-11、圖 6.1-12。此外,前述抽水試驗所得結果為
水平向之水力傳導係數,垂向水力傳導係數則假設為水平向之1/10。
圖 6.1-9 濁水溪沖積扇模式第 3 分層徐昇氏網格分區
圖6.1-11 濁水溪沖積扇模式第 2 分層水力傳導係數分布
2. 儲水係數 由於本研究進行穩態模式建構,所以尚不需要輸入儲水係數定。 3. 起始地下水水位 由於本研究進行穩態模擬之參數檢定,所以起始地下水位僅作為求解 穩態水位之初始值。 4. 抽水量、補注量 本研究進行抽水量及淨補注量檢定,於檢定前會先給予一個初始值, 再 由 檢 定 系 統 規 則 進 行 調 整 。 其 中 第 一 層 初 始 值 為 每 平 方 公 里 補 注 2000cmd,第三層及第五層為每平方公里抽水 1000cmd。當系統依據規則調 整完畢後,將得到檢定後之淨補注量與抽水量。 5. 濁水溪沖積扇參數檢定 本研究進行穩態模擬參數檢定,以民國 89 年至民國 96 年濁水溪沖積 扇各觀測井之觀測水位平均值,作為穩態模式之參照水位。
6.2 濁水溪沖積扇地下水數值模式參數檢定結果
本案例為實際案例,故給予較簡例為高之容忍誤差(Error tolerance),其 值為1 公尺。圖 6.2-1 說明本系統檢定濁水溪沖積扇之過程,橫座標為調整 次數,縱座標為全區水位均方根誤差(取對數表示)。在經過 252 次參數調整 後,各區模擬水位之檢定誤差均在1 公尺以下,且全區檢定均方根誤差(RootMean Square Error)為 0.37 公尺。圖 6.2-1 中之均方根誤差隨著調整次數增 加而逐漸下降,而調整過程中偶爾會有均方根誤差忽然放大的情況,原因 是第一層為非飽和層,當補注量不夠時,將導致某些分區因地下水量不足
而形成抽乾的情況,當此情況發生時 MODFLOW-2000 可在抽乾的格網自
行設定一水位値以表示該網格抽乾,本研究設定該值為-888,故計算後之
-0.5 0 0.5 1 1.5 2 2.5 3 3.5 0 50 100 150 200 250 調整次數 LO G (RM S E) 圖6.2-1 參數檢定過程之全區水位均方根誤差 圖6.2-2、圖 6.2-3、圖 6.2-4 分別為濁水溪沖積扇第一層、第三層、第 五層之水位等值圖,其中藍色實線為觀測水位,灰色虛線為檢定後之模擬 水位,圓點為觀測站位置。由圖所示,觀測水位與檢定後之模擬水位相當 接近,且空間分佈幾乎一致。另外,圖6.2-5 則為各觀測點之觀測水位與檢 定後之模擬水位比較圖,橫座標為觀測水位,縱座標為檢定後之模擬水位, 圖上各點之分布接近於x = y 之直線,因此可證明本參數檢定系統有能力檢 定實際案例之淨補注量與抽水量並能得到良好之成效。
圖6.2-2 第一層觀測水位與檢定後模擬水位等值圖 圖6.2-3 第三層觀測水位與檢定後模擬水位等值圖 (單位:公尺) (單位:公尺) 觀測水位 模擬水位 觀測水位 模擬水位
圖6.2-4 第五層觀測水位與檢定後模擬水位等值圖 觀測水位與模擬水位 -40 -20 0 20 40 60 -40 -20 0 20 40 60 觀測水位(m) 模擬水位( m ) 圖6.2-5 觀測水位與檢定後模擬水位關係圖
6.3 綜合討論
6.3.1 水平衡分析
(單位:公尺) 觀測水位 模擬水位檢定後各區之淨補注量分布及抽水量分布如圖6.3-1~圖 6.3-3 所示,圖 6.3-1 為濁水溪沖積扇第一層淨補注量,圖 6.3-2 及圖 6.3-3 為第三層及第五 層抽水量。經計算得模式總淨補注量為每年12.41 億噸,總淨抽水量為 12.75 億噸。第三層總抽水量為每年 6.44 億噸,第五層總抽水量為每年 5.54 億噸。 定水頭邊界(海平面)每年流入 0.59 億噸、流出 0.26 億噸。 因為本研究進行參數檢定,所參考之觀測水位為補注與抽水之綜合結 果,所以在淺層僅能反應抽水或補注加總後的結果,故無法推估淺層補注 量與抽水量,只能求得淨補注量或淨抽水量,因此若能取得淺層補注量, 將可推得淺層抽水量。假設將江崇榮等人(2006)所推估之濁水溪沖積扇於 1999~2001 年之補注量平均,可得平均總補注量為 15.33 億噸,將此值代入 本參數檢定結果,可得第一層總抽水量為每年3.69 億噸,總抽水量為每年 15.67 億噸,若將江崇榮等人(2006)所推估之 3 年抽水量與流失量總和取平 均,其推估值為15.70 億噸,與本研究所推估之值相當。 圖6.3-1 檢定後第一層淨補注量分布情形 (單位:立方公尺/天)
圖 6.3-2 檢定後第三層抽水量分布情形
圖 6.3-3 檢定後第五層抽水量分布情形
(單位:立方公尺/天)
6.3.2 土地利用現況可能抽水量分布分析
由第一層補注量分布情形圖可知,濁水溪沖積扇補注量多集中在靠近 山麓的地區,與山區雨量多且多為礫石層,入滲量大的情形相符。而在雲 林地區接近濁水溪出海口的地方,則因該處土層水力傳導係數較大,且因 第一層與第三層間無阻水層,所以補注量較其他地區稍大一些。 由第三層與第五層抽水量分布可知,抽水量較大的地區多分布在沿海 及鐵路車站附近,由內政部土地使用資料(如圖 6.3-4、圖 6.3-5)及 Google 衛星地形圖(如圖 6.3-6、圖 6.3-7、圖 6.2-8)進一步比對可發現,沿海地區有 許多養殖漁業,魚池遍佈,因此地下水抽取量較多;而在鐵路車站附近, 為都市的中心,工業區則位於都市外圍,形成一個人口密集,工業發達的 區域,因此可推測這些區域為地下水使用量較大之區域。 經現地概況分析可發現,本研究檢定後之抽水量或淨補注量之分布與 現地狀況近似,如此即可證明本研究設計之參數檢定規則應用在實際案例 仍深具可信度,且具有實際應用之能力。圖6.3-4 第三層抽水較大區域與土 地利用
圖6.3-5 第五層抽水較大區域與土
圖6.3-6 第三層抽水較大區域與衛 星地形圖
圖6.3-7 第五層抽水較大區域與衛
圖6.3-8 放大漁塭地區之衛星地形圖
6.3.3 分區間交互影響特性分析
為了進一步觀察濁水溪沖積扇之上下層分區交互影響之特性,因此從 中挑選 7 個分區,並對其檢定過程進行分析,選定區域分別為六合(1)、豐 榮(1)、箔子(1)、石榴(2)、瓊埔(1)、虎溪(3)、豐榮(3),其中六合(1)表示在 第一含水層且位於觀測井六合所屬分區的範圍。其檢定過程之Q 值變化如 圖6.3-9 所示。這 7 個分區分別位於不同分層之上、下游。從調整過程可以 發現,系統會先大幅修正第一層主要補注區,接著在大幅修正下層的抽水 區域,直至修正到趨近合理值,再回去小幅修正第一層補注區,如此來回 修正到系統收斂而停止。-4000 -3000 -2000 -1000 0 1000 2000 3000 4000 5000 6000 7000 0 50 100 150 200 250 調整次數 Q (c m d) 六合(1) 豐榮(1) 箔子(1) 石榴(2) 瓊埔(1) 虎溪(3) 豐榮(3) 圖6.3-9 Q 值檢定過程 接著再觀察同一分層之分區間交互影響的特性,因此選取同一分層間 的7 個分區進行比較,所選取的 7 個分區為六合(1)、田中(1)、西螺(1)、竹 塘(1)、合興(1)、香田(1)、豐榮(1),這些區域都位於第一層,其中六合(1)、 田中(1)為上游分區,西螺(1)、竹塘(1)、合興(1)為中游分區,香田(1)、豐 榮(1)為下游分區,調整過程如圖 6.3-10 所示。從調整過程可發現,位於上 游的六合(1)、田中(1)會先大幅調整至一合理區域,接著中、下游區域才開 始大幅調整,由於下游區域與主要補注區距離很遠,所以受影響較小,較 快調整至合理值後就不再變動,當調整過程至尾聲時,可發現僅剩上游與 中游區域互相來回調整。
-2000 -1000 0 1000 2000 3000 4000 5000 6000 7000 0 50 100 150 200 250 調整次數 Q (cm d) 六合(1) 田中(1) 西螺(1) 竹塘(1) 合興(1) 香田(1) 豐榮(1) 圖6.3-10 Q 值檢定過程 綜合本節分析可發現,由於表層之上游地區為整體模式主要補注區, 因此調整抽水或補注,對整體模式水位影響較大,所以於檢定初期會先大 幅調整,此外因為濁水溪沖積扇在上游與中游處之水力傳導係數甚大,並 且在上游處,因垂向土層之通透性良好,所以上層主要補注區域與鄰近中 遊區域和附近下層區域極易互相影響,而需較多次跌代,才能調整至合理 值。而在下游地區,因受上游補注影響,所以會在上游區域修正至趨近合 理值後,才會開始大幅調整,且因其影響區域較少或接近定水頭邊界,因 此會較上、中遊區域較快調整至合理值。