國 立 交 通 大 學
電控工程研究所
碩 士 論 文
基於使用者意圖之機器人行動輔具操控
輔助系統研發
Development of Human-Intention-Based
Manipulation Assistive System for Robot Walking
Helper
研 究 生: 吳昌翰
指導教授: 楊谷洋教授
I
基於使用者意圖之機器人行動輔具操控
輔助系統研發
研究生: 吳昌翰 指導教授: 楊谷洋教授
國立交通大學電控工程研究所
摘要
近年來,由於醫療科技的進步提高了人類平均壽命,加以出生率逐年下降, 人口老化的問題逐漸浮上檯面,照顧銀髮族的生活起居更成為重要的議題。現今 各式各樣的行動輔具機器人之發展漸趨成熟,本實驗室也開發行動輔具i - Go以 應對銀髮族生活不便的困擾。在本論文中,我們以力感測握把收集使用者握力並 分類其操作意圖,經模糊系統推導出對應的煞車力輔助使用者操作。為因應操作 者使用習慣不同,我們另外設計一學習方法,透過多次迭代,可訓練出符合個別 使用者之模糊控制參數,讓行動輔具符合使用者的使用習慣。實驗結果證明,透 過煞車力輔助,使用者能更加精確地操作行動輔具。II
Development of Human-Intention-Based Manipulation
Assistive System for Robot Walking Helper
Student: Chang-Han Wu Advisor: Dr. Kuu-Young Young
Department of Electrical and Control Engineering
National Chiao Tung University
Abstract
In recent years, the progress in medical innovation has contributed to longer life-span of human being. Cause of the decrease of birthrate, the problem of aging of population has been emerged. Taking care of the elderly has now became an important issue. Nowadays, The progress of a variety of walking helper robots is becoming mature. For solving the problem of inconvenient in the elderly’s daily life, our laboratory also develop a walking helper “i - Go.” In this thesis, we gather the user’s grip force by a force-sensing handle and sort the it to different human intentions. The corresponding brake torque is evaluated from grip force via the fuzzy system. For different users, we design a learning method which gets fuzzy control parameters via iterated training. This system adapts individual characteristic and assists users to manipulate the walking helper. The experiments show that the users can manipulate the walking helper more accurately with the brake torque.
III
目錄
摘要... I Abstract ... II 圖目錄... V 表目錄... VII 導論... 1 1.1 引言... 1 1.2 研究動機... 2 1.3 相關研究... 2 1.3.1 行動輔具與其使用者互動控制策略... 2 1.4 研究目標... 5 1.5 論文架構... 6 行動輔具操控輔助系統... 7 2.1 意圖模糊控制器設計... 8 2.1.1 力感測握把之意圖分類... 8 2.1.2 模糊控制器... 10 2.1.3 類神經模糊推論系統... 15 2.2 迭代式學習訓練... 16 系統實現... 21 3.1 i-Go 硬體架構 ... 22 3.1.1 握力資訊擷取機構... 22 3.1.2 周邊控制晶片 PIC18F452 ... 24 3.1.3 伺服煞車器... 25IV 3.1.4 軸編碼器... 27 實驗與分析... 28 4.1 迭代式學習訓練... 28 4.2 行動輔助實驗... 32 結論與未來展望... 38 5.1 結論... 38 5.2 未來展望... 39 參考文獻... 40
V
圖目錄
圖 1.1 XR4000 及其操作握把 ... 3 圖 1. 2 SmartWalker 與其控制系統架構... 3 圖 1. 3 Walking Helper ... 4 圖 1. 4InBOT ... 4 圖 1. 5 全向式拐杖型機器人... 5 圖 2. 1 (a)握把上視圖和(b)握把側面圖 ... 8 圖 2. 2 力感測貼片位置與量測施力點:(a)左手和(b)右手 ... 9 圖 2. 3 模糊系統架構圖... 11 圖 2. 4 編號 1、2、7、8 力感測器之歸屬函數... 12 圖 2. 5 編號 3、9 力感測器之歸屬函數... 13 圖 2. 6 輸出歸屬函數... 13 圖 2. 7 模糊系統層級架構圖... 15 圖 2. 8 學習訓練示意圖... 17 圖 2. 9 學習訓練演算流程圖... 18 圖 2. 10 學習訓練系統架構圖... 20 圖 3. 1 i – Go 行動輔具外觀... 21 圖 3. 2 i-Go 硬體架構圖 ... 22 圖 3. 3 握把側視圖... 23 圖 3. 4 握把骨幹上視圖... 23 圖 3. 5 (a)握把上視圖和(b)握把拆解圖 ... 24 圖 3. 6 (a)握把實際使用情形(正面)和(b)握把實際使用情形(側面) ... 24 圖 3. 7 PIC18F452 外觀 ... 25VI 圖 4. 1 模擬長者移動之膝關節角度限制支架... 29 圖 4. 2 訓練路徑記錄圖與誤差變化... 30 圖 4. 3 適應性學習訓練之實驗場景... 31 圖 4. 4 行動輔助實驗路徑圖... 33 圖 4. 5 行動輔助實驗場景... 33 圖 4. 6 受測者 A 之行動輔助實驗路徑變化 ... 34 圖 4. 7 受測者 A 輔助前後施力變化 ... 34 圖 4. 8 受測者 B 之行動輔助實驗路徑變化 ... 35 圖 4. 9 受測者 B 輔助前後施力變化 ... 35 圖 4. 10 受測者 C 之行動輔助實驗路徑變化 ... 36 圖 4. 11 受測者 C 輔助前後施力變化 ... 36
VII
表目錄
表 2. 1 使用者意圖判斷與對應輸出... 10 表 2. 2 模糊推論規則... 14 表 4. 1 輔具操作輔助受測者... 28 表 4. 2 行動輔助實驗之路徑誤差... 371
第一章
導論
1.1 引言
由於醫療科技的高度發展,死亡率正穩定地逐年下降,與此同時,出生率也 受到社會變遷的影響而快速下滑。這兩件事實使得人口平均年齡不斷地提高,老 年人口所佔的比例也因此而逐漸攀升。根據內政部主計處統計[1],台灣人口的 平均年齡已從九十年的 33.96 歲,上升至 38.51 歲,而六十歲以上人口更已上升 到 15.81%。在這個人口比例逐漸失衡的社會中,老人照護成了新時代的重要課 題。由於銀髮族容易罹患骨質疏鬆且下肢肌肉缺乏力量,在生活上經常遇到的問 題之一便是行動力下降,而解決方法常是以枴杖、支架或輪椅輔助老年人行動。 使用輪椅雖能代替雙足行走,但有研究指出,一旦開始使用輪椅,容易導致下肢 肌肉加速萎縮[2]。使用拐杖或支架等輔助工具,能讓銀髮族的行動能力維持一 定水準,且有助其建立生活自信,但枴杖或支架的輔助能力稍弱,且功能性不足。 近來由於機器人科技的進步,一個新的觀念正逐漸成形:我們可以利用機器 人取代居家看護來照護銀髮族。形形色色的居家輔助型機器人能夠提供各式各樣 的服務,其中最為重要的一種便是行動輔助。Kosuge 等學者[3]提出了被動式行 動輔具的概念。有別於傳統的主動式行動輔具機器人,被動式行動輔具更重視使 用者的安全性。為排除主動式行動輔具的馬達暴衝問題,被動式行動輔具採用了 伺服煞車器做為制動器,能隨使用者意圖及環境資訊調整煞車器的輸出力矩,藉 由改變行動輔具的阻尼,達成轉彎或移動的功能。2
1.2 研究動機
被動式行動輔具由於本身不具有動力,且較為笨重,因此操控不易,需要好 的輔助策略幫助使用者操作。在現存有助行器中,操作方法簡便者,功能往往過 於單純(例如傳統助行器),而具備多功能的助行系統,操作又較為複雜,需要使 用者依循某種指定方式操作。本研究希望能夠在使用者自然使用行動輔具的情況 下,基於使用者之意圖控制行動輔具,輔助使用者更加順利地操作,達成人機互 動的目的。1.3 相關研究
目前對於行動輔具的研究多著重在環境偵測與補償、使用者姿態辨識等主題。 少部分則搭載有不同型式的力感測器,透過行動輔具受力的變化,做出適當的補 償,協助使用者操作輔具。以下針對具有力感測與相關控制策略的研究做概略性 的介紹。1.3.1 行動輔具與使用者互動控制策略
2003 年,卡內基美濃大學的 Morris 等學者發展出 XR4000 移動機器人平台 [4],並設計一握把蒐集使用者的操作意圖。此握把抓握部分前後各有一阻尼, 並各設置一力感應器,當使用者推拉此握把時,輔具便以力感應器量測值推算適 當的移動速度與旋轉速度,以控制此主動式行動輔具。此握把抓握部分前後各有 一阻尼,並各設置一力感應器,當使用者推拉此握把時,輔具便以力感應器量測 值推算適當的移動速度與旋轉速度,以控制此主動式行動輔具。3
(a) XR4000 (b) XR4000 操作握把 圖 1.1 XR4000 及其操作握把[4]
2006 年由 Metthew Spenko、Haoyong Yu 與 Steven Dubowsky 等學者所完成 之 Personal Aids for Mobility and Monitoring(PAMM)系統[5],具備定位、環境偵 測,及使用者健康狀態監控等功能,並搭載於主動式行動輔具 SmartWalker[6]之 上。PAMM 系統採用六軸式力感應器偵測使用者施於握把上之力與力矩作為使 用者操作意圖,並經由 Admittance Controller 與其動態方程推算出對應的輔具移 動速度。
圖 1. 2 SmartWalker[6]
2007 年由日本東北大學 Kosuge 等學者所發展出的 Walking Helper 主動式行 動輔助機器人[3],具備全向式行動底座,由四個 Macanum wheel 所組成,其握
4 把支架具力感應器,可偵測使用者施加之力與力矩,並改變其底座之旋轉中心, 配合使用者之操作特性,輔助使用者操作。 圖 1. 3 Walking Helper[3] 2009 年,由德國的 Dillmann 學者所發展之觸控式購物車 InBOT[7],具力感 應握把,內嵌壓力計,能感測 X 方向與 Y 方向之受力,並以此推算使用者施加 之力矩。使用者可以握把上的開關來選擇操作模式,分為基本行為模式與進階行 為模式,前者由購物車自行導引,後者為使用者自由操作,在後者的模式中,系 統會將使用者施力經由 SVM 分類為不同的操作指令,給予不同的輔助。 (a) InBOT 整體外觀 (b) 觸控握把 圖 1. 4 (a)InBOT 整體外觀和(b)觸控握把[7]
5
2011 年由 Wakita 等學者所提出之全向式拐杖型機器人[8],於握把部分安裝 一六軸力感應器,藉以量測使用者施加於機器人之力與力矩,作為使用者之行動 意圖,並設計一模型用來歸納使用者之意圖方向(Intentional Direction, ITD),透 過 Iintention-Based Admittance Control(IBAC)將使用者施加的力與力矩換算為適 當的輔具速度與角速度,依此提供使用者輔助。 圖 1. 5 全向式拐杖型機器人[8]
1.4 研究目標
主動式行動輔具往往需要得知使用者意圖藉以操控馬達,提供行動輔具之移 動力,而被動式行動輔具之動力來源則由使用者提供,並以煞車器做為致動器提 供輔助,因此更需要獲知使用者之行動意圖,藉此幫助使用者順利操作,在行動 輔具的支持下平順地抵達目的地。在相關研究中,大多使用多軸力感應器量測使 用者對輔具所施加之力與力矩,藉以判斷使用者意圖,但多軸力感應器造價昂貴,6 且有容易損壞的缺點[8]。而部分研究使用壓感式力感測器[4],但設計上過於陽 春而難以有效收集、分類使用者意圖。因此本論文以實驗室開發之 i-Go 被動式 行動輔具為平台,並採用實驗室所設計之力感應握把,以使用者的握力強弱分佈 做為輸入資料,運用模糊控制理論推導出合宜的剎車器輸出,讓使用者在移動、 轉彎的操作上更加平順、省力與安全。為配合個別使用者之操作習慣,我們可經 過多次迭代學習,建立資料庫後,經由適應性類神經模糊推論系統,得到適合該 使用者之模糊控制參數,使其操作時路徑更加精確、平順。
1.5 論文架構
第二章將介紹我們所歸納出的意圖分析與控制策略,首先分析行動輔具的動 態模型,並說明如何運用握力分佈資料,決定行動輔具的剎車力輸出。第三章為 系統實現,介紹實驗平台 i-Go 的硬體架構、及控制系統架構。第四章為模擬與 實驗結果,以行動輔具進行實驗,記錄使用者使用行動輔具時的資訊,藉以分析 控制策略的成效。第五章為本論文的結論以及未來行動輔具可能的發展方向。7
第二章
行動輔具操控輔助系統
本章介紹基於人類意圖之行動輔具操控系統,使用者操作行動輔具時,系統 可透過握把上之力感測貼片量測使用者之握力分布,以此為依據辨識使用者操作 意圖,再藉由調節輔具煞車力矩的強弱,達到輔助使用者操作的功效。在系統的 設計中,藉由依專家知識設計之模糊控制器,模糊控制器將各個力感測器設定為 不同的權重,並依照輸入的大小區分為不同的歸屬程度。經模糊規則決定其輸出 之歸屬程度,透過解模糊化,得到相應的輔具煞車力矩。此煞車力矩可在使用者 操作時,增加車體之穩定度,並順應使用者意圖改變其大小,幫助使用者作出前 進、迴轉或停止等操作。因應使用者操作習慣的不同,可透過一系列的訓練,經 由類神經模糊系統,學習適合該使用者的模糊歸屬函數參數。 以下將在本章介紹操控輔助系統的各個要點:2.1 節,說明模糊控制器的設 計與架構:2.1.1,介紹力感測握把設計與偵測之意圖分類;2.1.2,介紹模糊控制 器的設計方式;2.1.3,介紹類神經模糊系統調變參數之方法;2.2 節,說明如何 透過迭代式訓練學習,得到類神經模糊系統學習的輸入輸出對應。8
2.1 意圖模糊控制器設計
被動式行動輔具之制動器為伺服煞車器,當使用者操作輔具時,可藉由改變 煞車力矩大小,幫助使用者改變輔具前進的方向,並達到輔助的目的。目前關於 使用者意圖的研究廣泛地使用到力感測器,其中,以可量測力與力矩之多軸力感 應器較為精準可靠,但其造價昂貴、容易損壞,故輔具難以大量生產,並應用到 日常生活中。我們的目的是以造價較低廉的力感應貼片取代之。但力感測貼片所 量測到的值,其準確性及重複性低,且只能量測單點施加的壓力。基於模糊系統 對於輸入的不確定性有足夠的容忍度,且不須明確數學模型等優點,我們採用此 種方式來進行控制[11]。2.1.1 力感測握把之意圖分類
圖 2.1 為本實驗室設計之力感測握把,握把為圓柱形,每一面有四個凹槽可 放置力感測貼片,單個握把最多可放置十六個。考慮到實際抓握時,主要接觸點 只有九個,我們只設置九個力感測貼片,左右握把之力感測器由編號 1 - 9 表示 之,其分布與量測手掌施力點如圖 2.2 所示。 (a) 握把上視圖 (b) 握把側面圖 圖 2. 1 (a)握把上視圖和(b)握把側面圖9
3
2
1
6
5
4
9
8
7
1
2
3
4
5
6
7
8
9
1
2
3
7
8
9
4
5
6
3
2
1
9
8
7
6
5
4
(a) 左手 (b) 右手 圖 2. 2 力感測貼片位置與量測施力點:(a)左手和(b)右手 根據握把特性與其使用情況,我們可以初步分類出使用意圖。對右握把而言, 當編號 1 到 3 之力感測器量測值上升時,代表使用者有停止或順時針迴轉之意圖, 故應對應右輪煞車力矩上升;而當編號 7 到 9 之力感應器量測值上升時,代表使 用者有前進或逆時針迴轉之意圖,應對應右輪煞車力矩下降。對左握把而言,當 編號 1 到 3 之力感應器量測值上升時,代表使用者有停止或逆時針迴轉之意圖, 故應對應左輪煞車力矩上升;而當編號 7 到 9 之力感應器量測值上升時,代表使 用者有前進或順時針迴轉之意圖,應對應左輪煞車力矩下降。而左右握把編號 4 到 6 之力感測器皆用以量測使用者下壓力,其意義為使用者對輔具之依賴程度, 當量測值高時,代表使用者對其依賴程度高,應增加煞車力矩輸出以確保使用者10 安全。握把各力感測器之量測值所對應之使用者意圖與煞車力矩輸出如表 2.1 所 示。 表 2. 1 使用者意圖判斷與對應輸出 力感測器編號 使用者意圖 對應輸出 右握把 1 – 3 停止或順時針迴轉 右輪煞車力矩上升 右握把 4 – 6 使用者對輔具之依賴程度 煞車力矩上升 右握把 7 – 9 前進或逆時針迴轉 右輪煞車力矩下降 左握把 1 – 3 停止或逆時針迴轉 左輪煞車力矩上升 左握把 4 – 6 使用者對輔具之依賴程度 煞車力矩上升 左握把 7 – 9 前進或順時針迴轉 左輪煞車力矩上升
2.1.2 模糊控制器
為簡化問題,我們將左右握把力感測貼片的輸入分開考慮,即左握把之輸入 對應左輪煞車力矩輸出,而右握把之輸入對應右輪煞車力矩輸出。對於任一握把, 其編號 1 到 3 與編號 7 到 9 之力感測器,分別歸屬於不同之模糊系統,各模糊系 統約略相同,惟輸出之正負相異,編號 1 到 3 力感測器所對應之輸出為正,編號 7 到 9 力感測器所對應之輸出為負,而輸出項代表的是煞車力矩的增減。因此可 分為四個模糊系統,分別擁有三個輸入,一個輸出。編號 4 到 6 之力感測器則以 線性方式調變煞車力矩之增加。 模糊系統之架構圖如圖 2.3 所示,𝑢𝑖代表系統輸入,∆𝜏𝑏為系統輸出。力感 測器所量測到的輸入,經模糊化後將輸入數值轉化為歸屬程度,並經由模糊推論 轉化為輸出項的歸屬程度,其中,模糊推論係藉由事先制訂並儲存之規則庫完成, 最後再藉由解模糊化,將輸出的歸屬程度轉化為實際煞車力矩之增減。11 模 糊 化 解 模 糊 化 模糊推論 規則庫 模糊控制器 u1 u2 u3 Δτb 圖 2. 3 模糊系統架構圖 在模糊化的階段,我們必須先制定輸入的歸屬函數。在大部分的模糊系統中, 通常會使用高斯函數、三角形函數、梯形函數、頂點(Sharp peak)函數等函數將 輸入對應為 0 到 1 的歸屬程度。由於本論文係將模糊控制應用於即時系統,考量 到運算時間,我們採用計算上較精簡的三角形函數、Z 形函數與 S 形函數作為輸 入的歸屬函數。三角形函數如(2.1)式所示: 𝑝𝑖𝑗 = {1 − 2|𝑢𝑖−𝑚𝑖𝑗| 𝜎𝑖𝑗 , if 𝑚𝑖𝑗 − 𝜎𝑖𝑗 2 < 𝑢𝑖 < 𝑚𝑖𝑗 + 𝜎𝑖𝑗 2 0, otherwis (2.1) 而 S 形函數則如(2.2)式所示: 𝑝𝑖𝑗 = { 0, if 𝑢𝑖 < 𝑚𝑖𝑗 −𝜎2𝑖𝑗 1, if 𝑢𝑖 > 𝑚𝑖𝑗 1 −2|𝑢𝑖−𝑚𝑖𝑗| 𝜎𝑖𝑗 , otherwise (2.2) Z 形函數則如(2.3)式所示: 𝑝𝑖𝑗 = { 0, if 𝑢𝑖 > 𝑚𝑖𝑗 + 𝜎𝑖𝑗 2 1, if 𝑢𝑖 < 𝑚𝑖𝑗 1 −2|𝑢𝑖−𝑚𝑖𝑗| 𝜎𝑖𝑗 , otherwise (2.3) 其中𝑖代表輸入項的項次;𝑗代表歸屬函數的項次;𝑝𝑖𝑗為輸入𝑖在歸屬函數𝑗的歸屬 程度;𝑢𝑖代表第𝑖項輸入;𝑚𝑖𝑗為輸入𝑖在歸屬函數𝑗的中心;𝜎𝑖𝑗為輸入𝑖在歸屬函數 𝑗的寬度。由於使用者操作輔具時會給予握把一力矩,如(2.4)式所示:
12
𝜏ℎ = 𝑓ℎ× 𝑑 (2.4)
使用者施加力矩的大小𝜏ℎ與力臂長度𝑑成正比,越靠近外緣的力感測器其力臂越
長,故應有越高的權重。我們將接近內緣的兩個力感測器(即編號 1、2、7、8) 分為施力小(Small, S)與施力大(Large, L)兩種程度,而最靠近外緣的力感測器則 細分為施力小(Small, S)、施力中(Medium, L)及施力大(Large, L)等三種程度,每 一種施力程度,均對煞車力矩的增減有相同的貢獻,如此一來,最外緣之力感應 器之量測值變化,對輸出的增減會有最大的影響。圖 2.4 - 2.6 所示為輸入、輸出 歸屬函數的作圖,各項參數皆為預設值,其中,𝑛𝑖𝑗為輸出𝑖在歸屬函數𝑗的中心。 25 50 75 100 125 150 175 200 225 250 0 1 Small Large 力感測器量測值 歸屬程度 m11=m12=25 m21=m22=225 圖 2. 4 編號 1、2、7、8 力感測器之歸屬函數
13 25 50 75 100 125 150 175 200 225 250 0 1 Small Large 力感測器量測值 歸屬程度 Medium m31 m32 m33 圖 2. 5 編號 3、9 力感測器之歸屬函數 5 10 15 20 25 30 35 40 45 50 0 1 VS VL 增加的煞車力矩 歸屬程度 S M L n11 n12 n13 n14 n15 圖 2. 6 輸出歸屬函數 模糊推論的目的在於模擬人類的思考與決策方式,控制規則以 IF – THEN 模式來呈現。模糊系統的輸出可以分為五種程度,在三個輸入的施力程度均為小
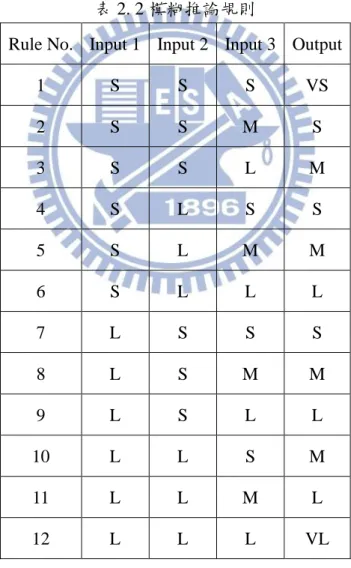
14 時,增加的煞車力矩程度為非常小(Very Small, VS),而任意一項輸入提升一個程 度級時,輸出力矩的程度也隨之上升一級,當所有輸入的程度均為最高級時,輸 出的煞車力矩增減程度即為非常大(Very Large, VL)。以此類推,我們可制定出十 二條模糊推論規則,如表 2.2 所示,其中,Input 1 代表編號 1 或編號 7 之力感測 器;Input 2 代表編號 2 或編號 8 之力測器;Input 3 代表編號 3 或編號 9 之力測 器。S 代表小(Small),M 代表中(Medium),L 則代表大(Large),而 VS 與 VL 則 分別代表非常小(Very Small)與非常大(Very Large)。舉例來說,若輸入 1 之歸屬 程度為小,輸入 2 之歸屬程度為大,且輸入 3 之歸屬程度為中,則煞車力矩的增 減則為略大。
表 2. 2 模糊推論規則
Rule No. Input 1 Input 2 Input 3 Output
1 S S S VS 2 S S M S 3 S S L M 4 S L S S 5 S L M M 6 S L L L 7 L S S S 8 L S M M 9 L S L L 10 L L S M 11 L L M L 12 L L L VL 在解模糊化的部分,本論文採用重心法(center of gravity),重心法係採用各 控制力之中心平均以得到平均控制力,亦即求出推論結果的面積中心,如(2.5)
15 式所示: 𝐶𝑐𝑟𝑖𝑠𝑝 =∑𝑛𝑗=1𝐶𝑗[𝜇(𝐶𝑗)] ∑𝑛𝑗=1[𝜇(𝐶𝑗)] (2.5) 其中,𝐶𝑗代表第 j 個模糊歸屬函數的中心值,𝜇(𝐶𝑗) 代表第 j 個模糊規則推論後 的適合程度,𝐶𝑐𝑟𝑖𝑠𝑝則為模糊控制器最終的輸出。
2.1.3
類神經模糊推論系統
為了符合個別使用者的操作習慣與施力大小,本論文以類神經網路學習方式, 藉由事前訓練所收集到的理想輸入與輸出,學習適合個別使用者的模糊控制參數, 其架構圖如圖 2.7 所示,其中,𝑚𝑖𝑗為輸入歸屬函數的中心,𝑛𝑠為輸出歸屬函數 的中心,𝑞𝑘為模糊推論後的歸屬程度,𝑤𝑖,𝑘為𝑚𝑖𝑗的權重,𝑣𝑘為𝑛𝑠的權重,VS、S、 M、L 與 VL 則為上節所介紹之輸出歸屬程度。 s1 s2 s3 Small Large Small Large Small Large Medium 1 2 11 12 6 M VS VL L S τ1 y u1 u2 u3 m11 m12 m21 m22 m31 m33 w1,1 w1,6 w3,12 q1 q12 n1 n5 w3,6 v1 v12 v2 v11 v6 圖 2. 7 模糊系統層級架構圖 當模糊推論規則建立後,輸出值主要受到輸入與輸出歸屬函數的中心,而其寬度 可以忽略,因此我們的調變參數如(2.6)式中之 Z 集合所示:16 Z = {𝑚11, 𝑚12, 𝑚21, 𝑚22, 𝑚31, 𝑚32, 𝑚33, 𝑛1, 𝑛2, 𝑛3, 𝑛4, 𝑛5} (2.6) 我們採用最小方均法(Least-mean square, LMS)作為監督學習的演算法,我們的目 標函數如(2.7)式所示: E = (y − ŷ)2 (2.7) 其中,y為模糊控制器的輸出,ŷ則為理想的輸出。控制參數的調變如(2.8)式所示: Z(t + 1) = Z(t) − ε∂E∂Z (2.8) 其中,ε為學習速率,Z 為(2.6)式之參數集合,𝑍(𝑡)為次數𝑡時調變參數 集合,t則 為學習迭代次數。故個別參數調整式如(2.9) – (2.10)式所示: 𝑚𝑖𝑗(𝑡 + 1) = 𝑚𝑖𝑗(𝑡) − 𝜀𝑚𝜕𝑚𝜕𝐸 𝑖𝑗 (2.9) 𝑛𝑠(𝑡 + 1) = 𝑛𝑠(𝑡) − 𝜀𝑛𝜕𝑛𝜕𝐸 𝑠 (2.10) 其中,𝜀𝑚、𝜀𝑛分別為輸入與輸出的學習速率。因此,我們只需求目標函數 E 與 各項參數之偏微分,經數次迭代後,使其收斂至容許誤差範圍即可。
2.2 迭代式學習訓練
在上一節中,我們所提出的模糊控制器之歸屬函數與模糊推論,係經由部分 使用者之經驗法則所推得,而每個使用者的使用習慣不盡相同,因此我們在本節 中提出一學習方式,經訓練後能夠學習出適合個別使用者的模糊控制系統歸屬函 數。為學習出適合個別使用者之模糊參數,使用者須先經過數次訓練,依照輔具 之通常使用情況,我們將訓練分為三種:直進、順時針迴轉及逆時針迴轉,其中, 順時針迴轉與逆時針迴轉訓練又分為不同的迴轉半徑。訓練過程如圖 2.8 所示, 步驟如下: Stage 1(S1):使用者將輔具兩輪軸中點對齊起點(Start),並操作輔具遵循標記 路線(藍色實線)前進。17 Stage 2(S2):由於使用者操作能力不佳,在訓練途中實際行進路徑(紅色虛線) 偏離標記路線,此時,輔具根據編碼式紀錄器所量測到的位置與內建之理想 路徑比對,可得一誤差 error,如(2.11)式所示: error = ± √(𝑥𝑝𝑜𝑠− 𝑥𝑝𝑎𝑡ℎ)2+ (𝑦𝑝𝑜𝑠− 𝑦𝑝𝑎𝑡ℎ)2 (2.11) 其中,(𝑥𝑝𝑜𝑠, 𝑦𝑝𝑜𝑠)表編碼器量測到的輔具實際位置,(𝑥𝑝𝑎𝑡ℎ, 𝑦𝑝𝑎𝑡ℎ)表示內建 的標記路線。 Stage 3(S3):系統根據所量測之誤差,提供煞車力修正,使輔具回到標記路 線。 X Y Error R Start Goal S1 S2 S3 圖 2. 8 學習訓練示意圖 在逆時針迴轉訓練中,若實際迴轉半徑大於標記路徑之迴轉半徑,代表輔具 缺乏+z方向之力矩;反之,若實際迴轉半徑小於標記路徑之迴轉半徑,即輔具 缺乏-z方向之力矩。同理,在順時針迴轉訓練中,若實際迴轉半徑大於標記路徑 之迴轉半徑,代表輔具缺乏−z方向之力矩;若實際迴轉半徑小於標記路徑之迴 轉半徑,即輔具缺乏+z方向之力矩。不足的力矩可由藉由調整煞車器來提供做 為補償,煞車力矩的調整係根據所量測之誤差,如(2.12) - (2.13)式所示: 𝑡′𝑏𝑙 = 𝑡𝑏𝑙 + 𝛼 × 𝑒𝑟𝑟𝑜𝑟 (2.12)
18 𝑡𝑏𝑟′ = 𝑡 𝑏𝑟+ 𝛼 × 𝑒𝑟𝑟𝑜𝑟 (2.13) 其中,𝛼為一調變參數,𝑒𝑟𝑟𝑜𝑟值的正負則根據訓練模式的不同,由演算法判斷。 在順時針迴轉訓練中,若實際迴轉半徑大於標記路徑之迴轉半徑,𝑒𝑟𝑟𝑜𝑟為正, 反之則為負;在順時針迴轉訓練中,若實際迴轉半徑大於標記路徑,𝑒𝑟𝑟𝑜𝑟為負, 反之則為正,決定補償煞車力矩之演算法流程如圖 2.9 所示。其中𝑅𝑟代表實際路 徑之迴轉半徑,𝑅𝑝代表標記路線之半徑,訓練開始前,使用者可設定訓練類型, 若為順時針迴轉,則判斷目前迴轉半徑是否大於預設路徑之半徑,若為真則將誤 差設定為正值,否則將誤差設定為負值;若為逆時針迴轉,則判斷目前迴轉半徑 是否大於預設路徑之半徑,若為真則將誤差設定為負值,否則將誤差設定為正 值。 Training Start CCW or CW Training Rr>Rp Rr>Rp Error = |Rr - Rp| Error =- |Rr - Rp| Δtbl= α*Error Δtbr= α*Error CCW CW Y N Y N 圖 2. 9 學習訓練演算流程圖
19
在訓練的過程中,系統會記錄使用者輸入的握力分布與當前煞車力矩輸出,完成 一次訓練後,便可得到約一百筆的訓練資料(資料量由實驗過程耗時長短決定), 藉由這些資料,系統可由類神經模糊系統得到適合該使用者之模糊歸屬函數,我 們可將其代換至原模糊控制器中,進行下一次訓練。每次訓練結束後,需統計該 次訓練的平均誤差 (Mean of Absolute Error, MAE),其計算方式如(2.14)式所示
MAE = 𝑁1∑𝑁𝑖=1|𝑒𝑟𝑟𝑜𝑟𝑖| (2.14) 其中,N 為資料總數,𝑒𝑟𝑟𝑜𝑟𝑖為任一時間點所量測之誤差。MAE 隨訓練次數的增 加而逐漸收斂,當其收斂至閾值時,及代表該訓練結束,可進行下一種類的訓練。 當所有訓練結束後,我們可藉由訓練過程中所紀錄之握力分布與煞車力矩, 作為訓練之輸入項與輸出項,經類神經模糊系統得到模糊歸屬函數,此即為該使 用者專屬之模糊控制參數,系統架構如圖 2.10 所示,在訓練過程中,模糊控制 器由使用者握力分布推得煞車力矩,傳送至輔具煞車器,此時輔具將量測到的位 置與預設路徑比對,經圖 2.9 所示之演算方法計算誤差,得到一補償後的煞車力。 學習模組可藉由握力分佈與補償後的煞車力,學習出新的模糊控制參數,並代換 至原模糊控制器。
20 模糊控制器 行動輔具 學習模型 學習演算法 系統資料庫 使用者握力 系統位置 + -+ + 訓練路徑 位置誤差 煞車力補償 煞車力矩 理想煞車力 類神經模糊控 制器 圖 2. 10 學習訓練系統架構圖 值得一提的是,由於此模糊控制器係經由分析使用者一般操作狀況(即直行、 順時針迴轉與逆時針迴轉),根據專家知識設計而成,較難以應付特殊操作路徑 (例如急轉彎、原地迴旋等)。若事前讓特定使用者進行操作訓練,能配合該使用 者之操作習慣給予輔助,本論文提出之訓練路徑係考慮一般使用狀況進行訓練, 惟使用者有特殊路徑需求時,可加入不同訓練路徑,擴大適應性類神經模糊推論 之資料庫,以應付更多不同的操作狀況。
21
第三章
系統實現
本論文之實驗平台為本實驗室開發之行動輔具「i - Go」,外觀如圖3.1所示。 計算核心為Dell筆記型電腦。i – Go的位置與加速度等資訊可由軸編碼器接收, 並透過PIC晶片計算後傳送至電腦;握力資訊則透過握把內嵌之力感測貼片傳送 至PIC晶片,由類比轉數位訊號後,傳送至電腦。電腦在收集到上述之外部資訊 後,經第二章所述之演算法,運算出適當之煞車力矩值,傳輸至PIC晶片,再藉 由PIC晶片傳輸PWM訊號改變實際之煞車力矩。PIC扮演著傳輸與接收的角色, 為控制核心與感測器、制動器之橋梁。PIC晶片與電腦之間透過RS232通訊協定 溝通。 圖 3. 1 i – Go 行動輔具外觀22
3.1 i-Go 硬體架構
i-Go 硬體架構如圖 3.2 所示,計算核心為 Dell 筆記型電腦,用以提供人機互 動介面及論文所述之演算法。透過左右各內嵌九個力感測貼片之握把收集使用者 握力資訊,來判讀使用者的操作意圖;左右輪各裝配一個軸編碼器,經過 PIC 晶 片計算,得到 i-Go 的位置與速度等資訊。由這些資訊,透過演算法,可推得一 適當的煞車力矩,再經由 PIC 傳送至致動器。 電壓變化 握力數值 輪軸轉數 位置與速度 煞車力數值 PWM訊號 圖 3. 2 i-Go 硬體架構圖3.1.1 握力資訊擷取機構
為偵測使用者的意圖,我們設計一力感應握把,結構由中心骨幹與外側的十 六片孔蓋組成,骨幹為一四角柱,四面構造皆同,內部為空心,外觀如圖3.3所 示。骨幹上一共有16個力感應器放置區,放置區旁有一細孔,可讓線路通過,如 圖3.4所示。每一放置區塊皆可上蓋,但由於有六處無法被手掌、手指所觸及,23 而操作時,大拇指處施力較無變化。故力感測器每隻握把僅配置九個,由於力感 測器在使用時必須讓力均勻地分布在感測貼片的圓形感測範圍內,故每個力感應 器上吸附一面積略小於感測區的磁鐵,可確保施力集中於力感應器的感測區,磁 鐵的另一端則吸附孔蓋,孔蓋只與磁鐵接觸,與握把骨幹幾乎沒有接觸點,如此 可確保使用者的施力不會分散到感測區以外的地方,如圖3.5(b)所示。當使用者 握住握把,即可由握把上的力感應器得知施力大小及施力分佈方式,實際使用情 況如圖3.6所示 圖 3. 3 握把側視圖 圖 3. 4 握把骨幹上視圖 30mm 42.5mm 6.25mm 3mm 3mm 18mm 2mm 16mm 7mm 16mm 3mm 2mm 9mm 16mm 3mm 2mm 9mm 16mm 3mm 2mm 9mm 16mm 3mm 2mm 2mm 13mm 120mm
24 (a) 握把上視圖 (b) 握把拆解圖 圖 3. 5 (a)握把上視圖和(b)握把拆解圖 (a) 握把實際使用情形(正面) (b) 握把實際使用情形(側面) 圖 3. 6 握把實際使用情形(a)正面和(b)側面
3.1.2 周邊控制晶片 PIC18F452
周邊控制晶片方面,我們採用由美國Microchip公司所開發生產之 PIC單晶 片,型號為PIC18F452,為一款具Harvard架構的8位元單晶片,採用精簡指令架 構(RISC),共有75個指令,工作時脈最高可達40MHz;PIC18F4520外觀如圖3.5 所示。PIC18F452單晶片微控制器提供了許多週邊功能,可讓使用者依據其目的 規劃使用。25 圖 3. 7 PIC18F452 外觀
3.1.3 伺服煞車器
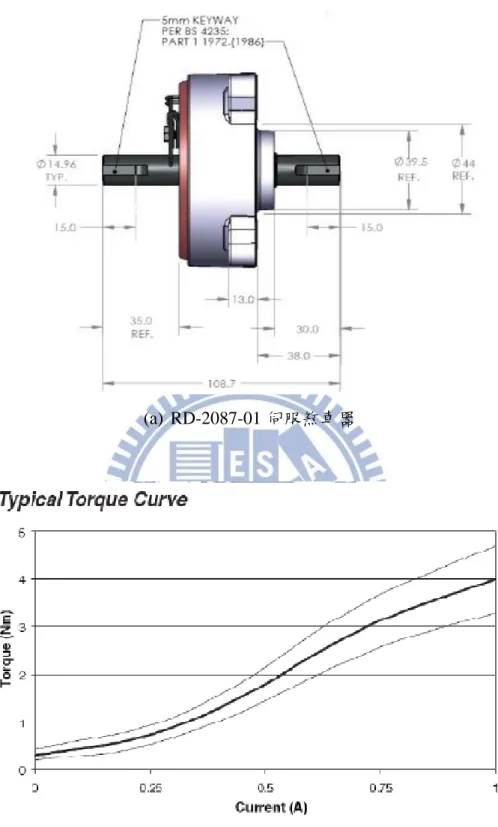
系統採用RD-2087-01伺服煞車器,如圖3.6(a)所示,為LORD公司製作的旋 轉式剎車器,系統結構中有一個置於磁黏滯液體中的轉動鋼盤,環型電磁線圈產 生剎車阻尼所需的磁場,磁黏滯液體以剪力方式產生黏滯阻尼力,最大輸入電流 為1.5 A,工作電壓為12-24 Volts,最大輸出力矩4 Nm,經由齒輪比將輸出力矩放 大至後輪為8 Nm,其輸入電流與輸出力矩如圖3.6(b)所示,反應時間可達10~ 30 ms,由於伺服煞車器輸入控制訊號為電流,而單晶片PIC18F452輸出為PWM電 壓訊號,在伺服煞車器與單晶片PIC之間,以電壓轉換成電流裝置-Wonder Box Device Controller作轉換的橋梁。26
(a) RD-2087-01 伺服煞車器
(b) 輸入電流與輸出力矩關係
27
3.1.4
軸編碼器
由於伺服煞車器上並沒有軸編碼器(Encoder)的功能,所以必須另外選用 軸編碼器,並且加以改裝,我們選用Faulhabere公司所生產的軸編碼器,其型號 為HEDS 5500 A,額定電壓為4.5~5.5V,解析度500 lpr(Lines per revolution),圖 3.7(a)為編碼器實體圖,加裝於伺服煞車器上,如圖3.7(b)所示,改裝後的編碼器 和伺服煞車器外側的轉軸相連接如圖3.7(c)所示,而伺服煞車器內側的轉軸是由 皮帶輪來帶動行動輔具的後輪,其中,伺服煞車器的皮帶輪和行動輔具後輪的皮 帶輪兩齒輪直徑比為1:2,因此輔具後輪轉一圈,可以達1000 lpr。 (a) 軸編碼器實體圖 (b) 軸編碼器加裝於伺服煞車器 (c) 伺服煞車器、軸編碼器、皮帶輪與後輪配置 圖 3.7 (a)軸編碼器實體圖,(b)軸編碼器加裝於伺服煞車器,和(c)伺服煞車器、 軸編碼器、皮帶輪與後輪配置
28
第四章
實驗與分析
在前兩章中提出了研究方法與系統實體架構,在本章我們將以 i-Go 作為平 台,依前述研究方法進行實驗。為了得到適合個別使用者的模糊控制參數,在 4.1 節介紹,如何透過訓練得到類神經模糊系統之輸入與輸出對應。為驗證適應 性意圖辨識模糊控制器可配合使用者習慣給予適當的煞車力輔助,於 4.2 節介紹 所進行之適應性學習行動輔助實驗。4.1 迭代式學習訓練
此訓練的目的在於透過學習訓練演算法與類神經模糊系統,學習出適當的模 糊控制參數,並減少在訓練路徑上的操作誤差。為驗證適應性模糊控制器對輔助 操作的有效性,我們邀請三名受測者進行實驗。三名受測者的資料如表 4.1 所示 表 4. 1 輔具操作輔助受測者 受測者 性別 年齡 行動能力 體重 A 男 28 良好 69 B 男 23 良好 80 C 男 24 良好 54 實驗時受測者必須穿戴腿部支架,增加重量並限制其關節彎曲,藉以模擬行動不 便的長者操作,如圖 4.1 所示:29 圖 4. 1 模擬長者移動之膝關節角度限制支架 訓練時,步驟如下: 1. 使用者操作行動輔具,遵循標記軌跡移動。 2. 行進中,輔具將比對實際路徑與預設路徑之誤差,提供煞車力輔助將其導正 至預設路徑。 3. 訓練結束後,由訓練中所記錄之輸入與輸出,經類神經模糊系統得到新的模 糊歸屬函數。
4. 計算該次訓練之平均誤差(Mean of Absolute Error, MAE,見 2.14 式),若 MAE 值大於閾值,則再重複一次同樣的訓練;若 MAE 值收斂至閾值以下,則進 行下一種路徑的訓練。 5. 當所有訓練結束後,綜合所有訓練資料,系統得到之模糊歸屬函數,即為適 合該受測者之控制參數。 訓練輔具將記錄輸入握力值與輸出煞車力,如圖 4.1(a)所示,藍色實線為 1.0 m 迴轉之預設路徑,紅色虛線為輔具紀錄之實際路徑,圖 4.1(b)則為訓練過程中各
30 個時刻的誤差值大小。圖 4.2(c) - (f)則表示 1.5 m 與 2.0 m 之訓練路徑與誤差值。 訓練路徑分為直線、順時針迴轉與逆時針迴轉,其中,迴轉路徑為半圓弧,實際 場景如圖 4.3 所示,迴轉半徑分為 1.0 m、1.5 m 及 2.0 m 等三種尺寸。 (a) 1.0m 訓練路徑 (b) 1.0m 訓練之誤差變化 (c) 1.5m 訓練路徑 (d) 1.5m 訓練之誤差變化 (e) 2.0m 訓練路徑 (f) 2.0m 訓練之誤差變化 圖 4. 2 訓練路徑記錄圖與誤差變化
31 圖 4. 3 適應性學習訓練之實驗場景 在訓練開始時,使用者會因操作不良,導致路徑偏差,此時系統即根據誤差 給予一煞車力修正,讓使用者回到預設路徑。但使用者可能因輔具的引導而又過 度迴轉,再次偏離路徑,這時輔具又會再次根據新的誤差給予煞車力修正,讓使 用者再度回到預設路徑,因此誤差在剛開始時通常較大,而後會在某個值來回擺 盪,終至收斂。由上述實驗結果可以看出,經由我們提出的訓練方法,在訓練過 程中,使用者可藉由輔具提供的煞車力輔助,逐漸消弭路徑上的誤差。訓練後所 得之模糊控制參數也能幫助使用者進行下一步的訓練。經多次迭代後,訓練時的 平均誤差(MAE)有顯著的下降。由於訓練路徑為直線、順時針迴轉與逆時針迴轉, 迴轉半徑分別為 1.0 m、1.5 m 以及 2.0 m,共七種訓練路徑,而每種訓練平均耗 時 24 秒,資料取樣時間為 0.25 秒。訓練次數因人而異,平均為 3 次,因此每人 約需 2000 筆的訓練資料。 訓練結束後,系統將訓練期間所記錄下的握力感測值與煞車力,作為類神經
32 模糊學習的輸入與理想輸出。在學習訓練前,歸屬函數的中心值之初始值為: {𝑚11, 𝑚12, 𝑚21, 𝑚22, 𝑚31, 𝑚32, 𝑚33} = {25, 225, 25, 225, 50, 125, 200} (4.1) {𝑛1, 𝑛2, 𝑛3, 𝑛4, 𝑛5} = {5, 15, 25, 35, 45} (4.2) 經類神經模糊系統學習調整後,歸屬函數中心值如(4.3) – (4.4)式所示: {𝑚11, 𝑚12, 𝑚21, 𝑚22, 𝑚31, 𝑚32, 𝑚33} = {11.7, 198.3, 22.4, 217.9, 44.4, 108.5, 224.0} (4.3) {𝑛1, 𝑛2, 𝑛3, 𝑛4, 𝑛5} = {4.3, 19.9, 22.6, 30.0, 41.4} (4.4)
4.2 行動輔助實驗
模糊控制參數調整完畢後即可進行操作輔助實驗。實驗場景為一空曠平坦之 場地,地面繪有 S 形軌跡,此軌跡由直線與圓弧線段組成,包含各種使用者平時 操作的情況,如圖 4.4 所示,其中紅色標註點為迴轉中心。受測者須遵循地面所 繪之軌跡,操作行動輔具移動,實驗情形如圖 4.5 所示。使用者操作期間,行動 輔具將紀錄受測者移動軌跡與施加之握力,圖 4.6(a)為未啟動煞車力輔助時受測 者 A 之實驗路徑圖。藍色實線代表場地所繪之參考路徑,紅色虛線為行動輔具 所紀錄之使用者移動軌跡,圖 4.6(b)則為啟動煞車器輔助後,受測者 A 之實驗路 徑圖。圖 4.7(a) - (c)為握力量測值變化,圖 4.7(a)顯示之數值為編號 7 – 9 之力感 測器量測值加總;圖 4.7(b)為編號 1 – 3 之力感測器量測值加總;圖 4.7(c)則為編 號 4 – 6 之力感測器量測值加總。藍色實線為沒有煞車力輔助時之握力變化,紅 色虛線則為啟動煞車力輔助後之握力變化。受測者 B 與受測者 C 之實驗結果則 如圖 4.8 - 4.11 所示,各圖之虛實色線所代表之意義與圖 4.6 – 4.7 之敘述相同。33 (0, 0) (120, 120) (0, 120) (120, 240) (360,240) (360, 360) (480, 360) (480, 480) 圖 4. 4 行動輔助實驗路徑圖 圖 4. 5 行動輔助實驗場景
34 (a)啟動煞車力輔助前之行進路徑 (b)啟動煞車力輔助後之行進路徑 圖 4. 6 受測者 A 之行動輔助實驗路徑變化 (a)受測者 A 施加推力變化 (b) 受測者 A 施加拉力變化 (c) 受測者 A 施加下壓力變化 圖 4. 7 受測者 A 輔助前後施力變化
35 (a)啟動煞車力輔助前之行進路徑 (b)啟動煞車力輔助後之行進路徑 圖 4. 8 受測者 B 之行動輔助實驗路徑變化 (a) 受測者 B 施加推力變化 (b) 受測者 B 施加拉力變化 (c) 受測者 B 施加下壓力變化 圖 4. 9 受測者 B 輔助前後施力變化
36 (a) 啟動煞車力輔助前之行進路徑 (b) 啟動煞車力輔助後之行進路徑 圖 4. 10 受測者 C 之行動輔助實驗路徑變化 (a) 受測者 C 施加推力變化 (b) 受測者 C 施加拉力變化 (c) 受測者 C 施加下壓力變化 圖 4. 11 受測者 C 輔助前後施力變化
37 觀察實驗結果可以發現,加入煞車力輔助後,路徑移動的精準度大幅提高, 代表輔具能依照使用者意圖給予適當的輔助,讓使用者操作時,能更貼近其意欲 移動之軌跡;輔具在使用者有迴轉意圖時,可根據使用者握力分布,調整煞車力 矩來因應迴轉之意圖,給予煞車力輔助後,使用者的施加之握力變化趨勢大致相 同,而其握力值依使用者習慣不同,有不同程度的下降,可降低使用者操作上的 負擔,輔助前後的路徑誤差(MAE)統計如表 4.2 所示。受測者分別進行三次實驗, 比較輔助前後之平均誤差,輔助後之誤差均比輔助前較低,啟動煞車器輔助後對 於路徑的精確性有大幅的改善。 表 4. 2 行動輔助實驗之路徑誤差 平均誤差(實驗一) 平均誤差(實驗二) 平均誤差(實驗三) 受測者A輔助前 11.4448 9.4888 13.5066 受測者A輔助後 5.1706 9.3056 8.4462 受測者B輔助前 14.3038 14.8854 17.4529 受測者B輔助後 7.2909 4.7515 6.0444 受測者C輔助前 8.9073 10.4091 14.5874 受測者C輔助後 6.1536 3.2814 4.2557 在 S 型路徑實驗中,使用者輔助前後的 MAE 有明顯的改善。由於輔具可偵 測使用者操作意圖並提供適當的煞車力矩輔助,使用者將能夠依照自己的意圖, 更加精確地操作輔具在意欲前進的路徑上行走。在加入煞車力輔助後,使用者施 加握力的趨勢與提供煞車力輔助前大致相同,但最大值與平均值略微降低,這說 明適應性控制系統對於降低使用者操作負擔也有一定的幫助。
38
第五章
結論與未來展望
5.1 結論
在大部分開發中與已開發國家,由於醫療科技的進步,使人口平均壽命延長, 加以出生率下降,因此高齡人口的比例逐步攀升,如何照護這些高齡人口,已成 為我們必須關心的議題。本論文提出了意圖辨識與模糊控制模組來輔助使用者操 作行動輔具,並透過本實驗室開發之行動輔助機器人「i-Go」實現。為了有效辨 識使用者操作意圖,我們透過一特殊設計之力感測握把,並分析使用者操作時之 握力分布,來判斷使用者意圖。透過迭代式學習訓練演算法,可收斂訓練時實際 路徑與指定路經之誤差,幫助使用者完成訓練,並得到適當的握力輸入與煞車力 輸出對應,透過類神經模糊推論,得到適合該使用者之模糊控制參數。在行動輔 助實驗中,通過模糊控制器可由使用者之握力得到輔助煞車力輸出,實驗顯示, 加入煞車力輔助後,可使移動路徑更加精確,貼近使用者意欲前進的路徑,同時, 也能降低操作時手部的負擔。整體來說,意圖辨識模組可以幫助老年人或傷殘人 士在操作行動輔具時更加輕鬆省力,且移動軌跡更加精確貼近自身意圖,讓行動 不便者在操作時更加簡單、自然,並且負擔較小。39
5.2 未來展望
本論文所提出之意圖辨識與控制方法,可有效幫助使用者在操作行動輔具時 更加輕鬆、自然。然而目前此意圖辨識模組之軟硬體方面仍有改善空間。其改進 點茲討論如下: 1. 握力感測握把之調整:目前使用者操作時,需將握把下壓以得到支撐力,惟 使用者重心與行動輔具有段距離,難以由輔具直接支撐身體重量,必須由手 掌來負擔支撐力,使用時間一久容易感到疲倦。故應將力感測握把位置前移, 在原握把處提供支架,讓使用者能將整個手臂倚靠在輔具上,而量測下壓力 部分則須移至支架處,如此一來可能使用者在操作時感到更加舒適。 2. 力感測器之種類:本實驗室採用之力感測器量測範圍為 0 lb 至 25 lb,但老年 人握力可達 70 lb 以上[20],目前採用的力感測器量測範圍可能不足以辨識其 他緊急狀況之意圖,而 Tekscan 公司所生產之較大一級力感測器所能量測到 的範圍是 0 lb 至 100 lb,但此種力感測器解析度較差,無法滿足一般使用情 況。若能找到符合握力範圍,又兼具靈敏度的力感測器,在意圖辨識上可達 到更好的效果。 3. 意圖辨識演算法:目前的意圖辨識主要針對常用的操作狀況,即前進、迴轉 與停止做設計,係根據當前量測之握力值作分析後給予煞車力輔助,若將來 可以做到依照使用者習慣事先預測其操作意圖,將能帶給使用者更大的幫 助。 期待未來 i-Go 與本論文提出之方法能有更多的進步,讓智慧型行動輔具機器人 能廣泛地運用在醫療機構與安養中心,甚至取代一般傳統行動輔具,走入人們的 日常生活,讓行動不便者享受更高的生活品質。40
參考文獻
[1] 行政院主計處,人口靜態統計http://sowf.moi.gov.tw/stat/month/m1-06.xls
[2] D. Chugo, W. Mastuoka, S. Jia, and K. Takase, “The Wheel Control of a Robotic Walker for Standing and Walking Assistance with Stability,” IEEE
International Symposium on Robot and Human Interactive Communication,
pp. 297-302,2008.
[3] Y. Hirata, A. Hara, and K. Kosuge, “Motion Control of Passive Intelligent Walker Using Servo Brakes,” IEEE Transactions on Robotics, vol. 23, no. 5, pp. 981-990, 2007.
[4] A. Morris, R. Donamukkala, A. Kapuria, A. Steinfeld, J. T. Matthews, J. Dunbar-Jacob, and S. Thrun, “A Robotic Walker That Provides Guidance,”
IEEE International Conference on Robotics and Automation , pp. 25-30, 2003.
[5] M. Spenko, H. Yu, and S. Dubowsky, “Robotic Personal Aids for Mobility and Monitoring for the Elderly, ” IEEE Transactions on Neural Systems and
Rehabilitation Engineering, vol. 14, no. 3, pp. 344-351, 2006.
[6] A. M. Sabatini, V. Genovese, and E. Pacchierotti, “A Mobility Aid for the Support to Walking and Object Transportation of People with Motor Impairments,” IEEE/RSJ International Conference on Intelligent Robots and
System, pp. 1349-1354, 2002.
[7] M. Goller, T. Kerscher, M. Ziegenmeyer, A. Ronnau, J.M. Zollner, and R. Dillmann, “Haptic Control for the Interactive Behavior Operated Shopping Trolley InBOT, ” Artificial Intelligence and Simulation of Behaviour
41
[8] K. Wakita, J. Huang, P. Di, K. Sekiyama, and T. Fukuda, “Human-Walking-Intention-Based Motion Control of an Omnidirectional-Type Cane Robot.” IEEE/ASME Transactions on Mechatronics, 2011
[9] O. Chuy, Y. Hirata, and K. Kosuge, “A New Control Approach for a Robotic Walking Support System in Adapting User Characteristics, ” IEEE
Transactions on Systems, Man, and Cybernetics Part C, vol. 36, no. 6, pp.
725-733, 2006.
[10] J. C. Ryu, K. Pathak, and S. K. Agrawal, “Control of A Passive Mobility Assistive Robot,” ASME International Mechanical Engineering Congress and
Exposition, pp. 1-10, 2006.
[11] A. Zhu and S. X. Yang, “Neurofuzzy-Based Approach to Mobile Robot Navigation in Unknown Environments,” IEEE Transactions on Systems, Man,
and Cybernetics—Part C: Applications and Reviews, vol. 37, no. 4, pp. 610-621,
2007.
[12] Lord Corporation,http://www.lord.com/
[13] Texas Instruments Corporation, http://www.ti.com/
[14] Microchip Corporation,http://www.microchip.com/
[15] Tekscan Corporation,http://www.tekscan.com/
[16] 王進德 編譯,類神經網路與模糊控制理論入門與應用,全華科技圖書,民 國九十七年四月。 [17] 曾百由 著,微處理器原理與應用─組合語言與PIC18 微控制器,五南圖書, 民國九十五年十月。 [18] 楊翔斌 著,基於使用者意圖之行動輔具設計,國立交通大學電機與控制工 程所碩士論文,2010。 [19] 郭育傑 著,基於使用者意圖之行動輔助機器人輔助策略設計,國立交通大 學電機與控制工程所碩士論文,2011。
42
[20] Xiao-Xia Chen, Jian-Guo Zhang, Bo Liu, Qi-Rong Shi, Er-Bang Zhao, Wei- Qiang Kong, Chuang-Yi Zuo-Bu, “Analysis of the Muscle Strength, Suppleness and Equilibrium of the Urban Elderly——Taking as an Example the Urban Elderly in Nanjing”, Journal of Chengdo Sport University, Vol. 36, No. 1, 2010.
![圖 1. 2 SmartWalker[6]](https://thumb-ap.123doks.com/thumbv2/9libinfo/8388966.178616/11.892.137.755.123.579/圖-smartwalker.webp)