行政院國家科學委員會專題研究計畫 期末報告
應用於智慧型車用輔助系統之行人偵測技術的設計與實現
計 畫 類 別 : 個別型 計 畫 編 號 : NSC 100-2218-E-151-006- 執 行 期 間 : 100 年 08 月 01 日至 101 年 10 月 31 日 執 行 單 位 : 國立高雄應用科技大學電子工程系 計 畫 主 持 人 : 連志原 共 同 主 持 人 : 陳培殷 計畫參與人員: 碩士班研究生-兼任助理人員:楊富仲 碩士班研究生-兼任助理人員:吳博聞 大專生-兼任助理人員:許睿暐 博士班研究生-兼任助理人員:葉俊顯 報 告 附 件 : 出席國際會議研究心得報告及發表論文 公 開 資 訊 : 本計畫可公開查詢中 華 民 國 102 年 01 月 31 日
中 文 摘 要 : 隨著汽車數位時代的來臨,車用安全輔助系統的設計已日趨 重要。而行人偵測則是車用安全輔助系統中一項相當重要的 技術。在行車輔助系統中,行人偵測主要能事先提醒駕駛, 路況有無行人竄出的任何危險情形或是及時提供行車安全的 保護措施。本一年計畫的主要目標即是發展適合車用安全輔 助系統的行人偵測技術,針對行人偵測的核心重要技術 - 梯 度方向直方圖(Histograms of Oriented Gradients, HOG), 進行實作與研究。希望此一計畫的實行,可以促進數位車用 電子技術的升級與普及應用,並能提昇汽車駕乘的安全性。 本計畫主要達成如下: (1) 發展適合車用開放軟體系統使用的低運算量(low-complexity)行人偵測技術核心。 (2) 依 open source 的精神免費提供完整的程式給社群使 用。 (3) 全程計畫的執行將依循 CMMI 流程管理模式,由需求分 析、專案規劃,開發設計,整合測試等階段流程逐一進行。 (4) 針對行人偵測技術做改良並修改,在盡量不降低其辨識 率的前提下,達到最佳化的要求。 中文關鍵詞: 行人偵測,車用輔助系統,影像辨識
英 文 摘 要 : The era of digital signal in car system is coming. In recent years, the design of car safety assistant system becomes more and more important. Pedestrian detection is one of the most important components in driver assistance systems. Pedestrian detection for driver assistance systems aims to detect these
potentially dangerous situations with pedestrians in advance to either warn the driver or initiate
appropriate protective measures in time. In this project, we have developed the most important technique of pedestrian detection - histograms of oriented gradients (HOG) for driver assistance systems. We believe that the developed technologies and implementations will be desired by people and essential of industrials in the near future. Our project achieves some goals:
(1) Develop the most important technique of pedestrian detection - histograms of oriented
gradients (HOG) for driver assistance systems. (2) The complete code can be provided for free based on the spirit of open source.
(3) To ensure the software development process, CMMI software model is followed.
(4) Focus on the issue of optimal pedestrian detection technique.
英文關鍵詞: pedestrian detection, Driver Assistance System, image recognition
1
一、研究目的
隨著全球汽車數量的不斷成長,根據 The Global Automotive Components 年報統計,近 年來全球汽車總數量已達 10 億輛,汽車已經成為路上交通最普遍的工具。因此為了因應如 此龐大的汽車數量,且避免更多不必要的車禍發生,大家對於行車安全的期望需求日益上 升。目前市面上利用攝影機的行車安全輔助系統(Driver Assistance System)已有很多,各家 有不同的實現方式且達成不一樣的效果。在這些眾多行車安全輔助系統應用中,如何減少 交通事故發生以及提升運輸效能是目前最為重要的課題。根據 2009 年警察署公布的意外死 亡數據顯示,全國因交通事故而導致的行人意外死亡人數逐年上升,因此如何在行車安全 輔助系統中加入行人偵測之應用,以減少事故發生率,進而降低行人因交通意外死亡率是 當前刻不容緩的課題。 行人偵測除了應用於車用安全系統之外,也可進一步應用於監視系統。隨著影像監視 系統的普及,目前監視系統僅能呈現或紀錄監視場景的畫面,並無進一步警示提醒作用, 此類系統最大的缺點在於需要倚賴人力進行監看,因此常因監看人員疲憊而造成管控上之 疏忽,此外此系統僅能完整紀錄監控場景,通常耗費許多儲存資源。若能加入行人偵測, 有效分析場景中有意義之物體,勢必能提高監控效益以及降低人力成本負擔。 近年來,關於行人偵測的研究已有許多[1]-[21],然而如何有效的偵測出行人,仍是目前電 腦視覺研究領域中非常困難的課題。行人偵測會受到環境場景變化以及人行姿態變化等影 響,因而加深辨識上的困難度。過去有些效果不錯的演算法,往往因為計算複雜度太高, 無法達到即時的要求,因此若應用在即時車用系統上,會因為無法即時反應而造成控制的 誤判,甚至錯誤的結果,影響甚鉅。因此本計畫將利用數位影像處理技術,開發一即時行 人偵測系統,對傳統演算法做修正及改良,希望能符合即時的需求,進而增加汽車影像輔 助系統的判斷正確率,以減少交通事故的發生率。本計畫主要期能:(1) 發展適合車用開放 軟體系統使用的低運算量(low-complexity)行人偵測技術核心-HOG,並依 open source 的精 神免費提供完整的程式。(2) 針對 HOG 技術做改良並修改,在不降低其辨識率的前提下, 達到即時的要求。
2
二、文獻探討
我們在很多論文中有發現關於行人偵測的研究方法,其發展目標主要為即時、可靠、 高準確性這幾個方向。在目前行人偵測的研究中,其演算法大致可分為兩大類:一是以外 觀為主(Appearance-Based Approach),一是以運動為主(Motion-Based Approach)。
A. Appearance-Based Approach 以外觀為主之行人偵測,其偵測技術主要透過一些影像特徵點來表示行人可能之外 觀,再經由標準圖形辨識的技術來偵測出影像中相對應外觀,以達到行人偵測的目的。基 於外觀為主之行人研究中,依據使用的特徵型態之不同,又可大略分為兩類:一是全域特 徵;一是區域特徵。[1][2][3][4][14][18]屬於使用全域特徵之行人偵測方法,其辨識主要利 用行人全觀資訊作為區分之依據,這些資訊包括行人之外形輪廓、頭部輪廓、對稱性、膚 色與特定服飾等。[5][6][7][8][9][10][11][12]屬於使用區域特徵之行人偵測方法,透過相關 學習分類機來學習型特有之區域特徵,藉由挑選訓練一些較有決策性的特徵點來對影像進 行分析,以判斷是否存在行人。因此以外觀為主之偵測,最直接的方式即透過搜尋影像中 行人特徵點來達成行人偵測[1] [2]。另一種方式是藉由樣板比對的方法,來偵測行人的存 在。這部分主要是透過建構不同角度以及不同姿勢之人形,利用比對的方式來偵測行人 [3][4][14][18]。關於區域特徵的方法,[5][6][7]使用梯度方向強度之統計長條圖(Histogram of Oriented Gradients, HOG)來表示人形之特徵,接著利用支援向量機(Supported Vector Machine, SVM)機器學習的方式,得出可有效表示這些特徵的分類器,作為行人偵測之用,因為 HOG 對於人形的輪廓與邊緣較敏感,因此偵測較不受環境因素干擾。 B. Motion-Based Approach 這類方法主要是觀察人類在連續影像間的動作與行為模式來達成行人之偵測。最直接 的方式是學習行人運動所造成之影像圖形[15]。此外,根據影像觀察得知,行人於運動過程 中的步伐也有很明顯的特徵,因此在目前研究中,也被廣泛應用於行人偵測[13][16][17]。 目前關於行人偵測的研究中,以外觀為主之行人偵測的複雜度與偵測效果較佳,其中 又以梯度方向直方圖(Histograms of Oriented Gradients, HOG)之特徵點來描述行人最為優 異,其不容易受到物體遮蔽與影像整體性影響,對行人特徵能達到準確之描述效果。因此 本計劃將以此特徵作為行人偵測之基礎,然而 HOG 在處理時,需要對整張影像的每個區塊 去做運算,在即時系統上是一個很大的挑戰,我們會針對 HOG 演算法去做分析與化簡改 良,在不降低其辨識率的前提下,達到即時的要求,增加車用輔助系統的附加價值。 系統架構包含兩大部分:行人分類學習以及行人偵測。行人分類學習之主要目的為結 合有效行人特徵點選取與分類器建構,我們利用支援向量機(Support Vector Machine, SVM) 來建立行人特徵點。在給定大量訓練樣本,其中包含行人樣板與非行人樣板,透過 SVM 學 習演算法,來選取有效的特徵點以架構出行人分類器。正確判斷出行人與非行人。
3
三、研究方法
由於必須考量車用安全性與克服型態不一致的人型特徵,因此採用近年來發展成熟的 特徵描述方法稱之為梯度方向直方圖 HOG,此演算法針對各種行人外貌、裝扮、複雜肢體 動作、行人比例大小與環境光源不一致等問題都可以具有強健性。HOG 特徵擷取演算法主 要分為四個步驟:(1)梯度變化計算、(2)梯度方向直方圖統計、(3)區塊正規化、(4)蒐集偵測 視窗內 HOG 特徵向量來完成特徵擷取。如圖 1 所示,其偵測視窗(detection window)是採用 64×128 像素且偵測大小等同於輸入圖片大小,這也意味著必須對整張輸入圖片做完一次完 整的特徵擷取。對於整張圖片的運算是由 block 與 block 之間重疊 8 個像素後由左至右、由 上至下進行掃描,接下來會依序地介紹各個步驟詳細執行方法。 64 128 Compute gradientsAccumulate weighted votes for gradient orientation over spatial cells
Normalize over overlapping spatial blocks of cells
Collect HOGs for all blocks over detection window Input image Detection window Feature vector, f = […, …, …, …, , …] Block cell cell cell cell 8 8 8 8 cell cell cell cell 8 pixels/overlap 64 128 cell Block
Detection window = input image
block block normalize 圖 1. HOG 特徵擷取流程圖 1) 梯度變化計算(compute gradients) 此步驟首先對於 cell 內每個像素的梯度變化進行計算,利用這個計算可以擷取出圖片 輪廓與邊緣資訊再透過區域 3×3 遮罩計算方式則可以有效抵抗環境光源變化不一致的 影響,接著根據輸入影像為彩色圖片,所以在計算像素梯度變化時需要先各別計算 RGB 三平面的水平與垂直梯度變化量如式子(1)-(4),最後再選擇最大變化量的平面作為計算 梯度方向向量的平面。 ( , ) ( 1, ) ( 1, ) h d x y I x y I x y (1) ( , ) ( , 1) ( , 1) v d x y I x y I x y (2)
4 1 2 2 2 ( h( , ) v( , ) ) Magnitude d x y d x y (3) 1 ( , ) tan ( v( , ) / h( , ));0 ~ 180 Orientation x y d x y d x y (4)
2) 梯度方向直方圖統計(accumulate weighted votes for gradient orientation over spatial cells) 接下來第二步驟則是將 cell 內每個像素的梯度向量依據梯度方向各別分配至所屬的方 向區間(bin)中,並加總每個區間累計的梯度強度值。此作法最大的用意在於處理行人 多變的肢體動作包含了行人彎曲的姿態等都可以具有強健性。假設我們已知梯度向量 方向範圍是 0°~-180°,我們預先將 0°~-180°分為 9 個區間(每 20°為一個區間),經過步 驟一的運算後,我們可以得知 cell 內 64 個像素的梯度向量、梯度方向及梯度大小,接 著,我們將 64 個梯度向量依據梯度方向的條件來判別所屬於哪個區間內,並且進而找 到其對應的最相鄰區間,然後再把這個梯度向量的梯度大小值進行線性內插的權重分 配運算。權重分配的方式是依據梯度向量到所屬區間及相鄰區間的距離,最後根據向 量所屬區間跟相鄰區間就可以得到權重分配後梯度向量大小的統計值,依序完成 64 個 梯度向量的統計來得到 9 個梯度方向直方圖。
3) 區塊正規化(normalize over overlapping spatial blocks of cells)
HOG 的第三步驟是以一個 block 為運算單位,首先將 block 內 4 個 cells 的梯度方向直 方圖做正規化動作,其正規化最主要的用意在於以機率角度來定義梯度向量分佈情 形,假設整合 1 個 block 為單位則整體總合為 1 進而分析出 cell 內部梯度向量分佈的方 向與統計量的大小,除此之外,其正規化的目的在於可以抵抗圖片內光線與陰影變化 或是圖片內前景與背景之間的差異性可能會造成行人辨識結果上的準確率降低的情 形。重複執行 4 次 HOG 的步驟一、二後可以得到 4 個 cells 的梯度方向直方圖統計, 也就是完成 1 個 block 梯度方向直方圖共 36 個向量。因此選擇一個正規化處理對於行 人偵測的最後結果會有明顯的影響,在多種的正規化方法中,我們採用 L2-norm 公式 並對於 block 內 36 個向量依序做處理,最後處理完的每個向量值會分佈於 0~1 之間正 好符合機率的角度定義,也就是各別機率不會超過值 1 且整體加總的和為 1,最後正 規化後的 36 個向量即 HOG 最後的輸出特徵向量。
4) 蒐集偵測視窗內 HOG 特徵向量(collect HOGs for all blocks over detection window) HOG 最後一個步驟則是收集偵測視窗內每個 block 的特徵向量,然後將這些輸出的特 徵向量輸入至 SVM 中進行訓練或分類,由於圖片大小為偵測試窗大小 (64×128 pixels),每個 block 是 16×16 pixels 且 block 與 block 之間重疊 8 像素,因此要掃描完整 張圖片需要執行 7×15 = 105 次的 HOG 特徵擷取運算,所以一張圖片輸出的特徵向量 為 36×105 = 3780 個向量。
5
四、結果與討論(含結論與建議)
本計劃首要目標乃是利用數位影像處理技術,開發出適合車用開放軟體系統使用的低 運 算 量 (low-complexity) 行 人 偵 測 技 術 核 心 - 梯 度 方 向 直 方 圖 (Histograms of Oriented Gradients, HOG),並針對此技術做改良並修改,在盡量不降低其辨識率的前提下,達到最 佳化的要求。全程計畫的執行將依循 CMMI 流程管理模式,由需求分析、專案規劃,開發 設計,整合測試等階段流程逐一進行,並依 open source 的精神免費提供完整的程式。系統 需求主要有:
開發一即時行人偵測系統。
透過梯度方向直方圖(Histograms of Oriented Gradients, HOG)子系統從一連串的輸入影 像串流中擷取出完整的單張影像資料,並進行梯度變化計算、梯度方向直方圖統計、 區塊正規化與蒐集特徵向量等資料,以提供 SVM 子系統所使用。
透過支援向量機(Support Vector Machine, SVM)子系統來分類出行人及非行人的影像資 訊。
透過影像展示子系統(Image Display Subsystem, IDS)將影像資訊編碼成一般標準格式 的影像檔案,並在監視器上顯示出正確的影像。
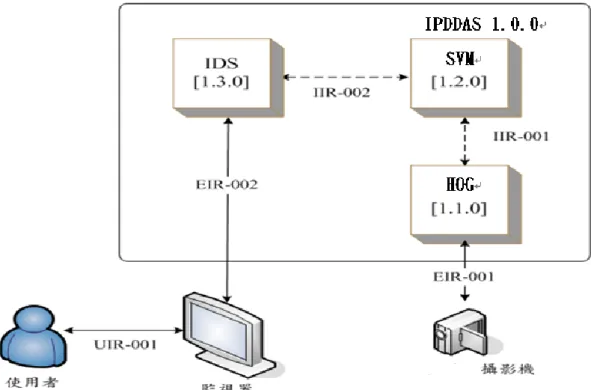
本 系 統 的 主 要 功 能 可 分 割 為 三 個 子 系 統 , 分 別 為 梯 度 方 向 直 方 圖 (Histograms of Oriented Gradients, HOG)、支援向量機(Supported Vector Machine, SVM)、影像展示子系統 (Image Display Subsystem, IDS)。各子系統間的介面及互動關係如圖 2 所示:
6 其中三個子系統的運作方式如下: 1) 梯度方向直方圖子系統的運作方式為:HOG 的輸入端是連接在嵌入式平台上的攝影 機,將輸入端的影像串流中,擷取出完整的單張影像資料,HOG 再將影像格式解碼, 化成 RGB 格式的影像資訊,輸出到 SVM 子系統。 2) 支援向量機子系統的運作方式為:SVM 的輸入端是 HOG,對於輸入的影像,利用 training 過的 SVM 去分類行人及非行人。 3) 影像展示子系統的運作方式為:IDS 的輸入端是 SVM,對於輸入的影像,將影像資訊 編碼成一般標準格式的影像檔案,再將影像資訊依序傳遞到監視器上顯示出正確的影 像。 這三個子系統運作方式如圖 3 與圖 4 所示: 梯度方向直方圖子系統 支援向量機子系統 影像展示子系統 圖 3. 三個子系統描述圖
7
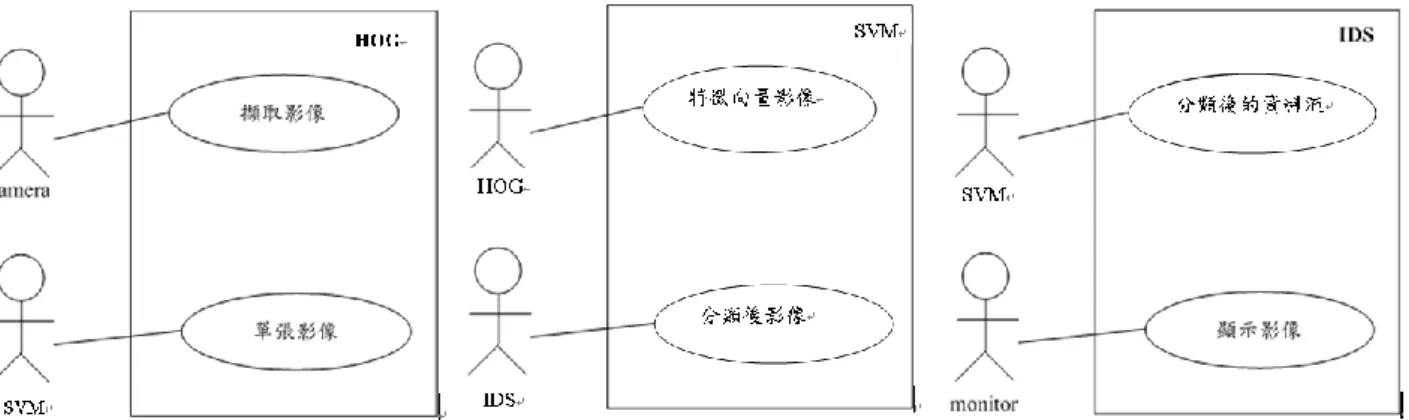
梯度方向直方圖子系統 支援向量機子系統 影像展示子系統
圖 4. 三個子系統 Use Case Diagram
本系統實作與測試結果如下: 1. 本系統可應用於智慧型車用輔助系統,其行人偵測技術在 PC 端與 Android 平板都有實 作,實作系統之使用者介面如圖 5: PC 端使用者介面 平板介面 圖 5. 使用者介面 2. 測試環境 (1) 關於測試環境所需的硬體規格說明,如下列所示:
測試用主機:CPU 為 Intel I3-2100 3.1GHz 或以上,記憶體為 2GB RAM 或以上,硬碟 空間 80GB 以上,數量一台。Google Android 系統平板:具備 130 萬畫素以上攝影鏡頭且支 援 Android 1.5 以上版本作業系統,數量一台。
(2) 關於測試環境所需的軟體規格說明,如下列所示:
作業系統:測試用主機可在下列作業系統下運行:Windows XP 或 Win7 與 Linux。 平板平台運行 Android 作業系統。開發程式軟體:JDK 5、Eclipse IDE、Android Development Tools plugin (ADT) for Eclipse、Android SDK。
8 (3) 關於測試期間所需的測試資料來源及數量,說明如下: 測試影像:由參加測試之測試人員拍攝 10 張影像進行測試。 3. 測試結果 本系統已達成需求規格書所列之所有功能,如下所示: A. 整個系統的需求規格完成度(100%) (1) 系統能擷取出鏡頭的影像並進行分析 (2) 系統能分類影像 (3) 系統能將分類結果顯示在監視器上 B. 梯度方向直方圖子系統的需求規格完成度(100%) (1) 即時接收影像資料 (2) 擷取出鏡頭的影像 (3) 計算影像梯度變化 (4) 統計梯度方向變化 (5) 影像區塊正規化 (6) 蒐集影像特徵向量 (7) 輸出特徵向量 C. 支援向量機子系統的需求規格完成度(100%) (1) 讀取影像資訊 (2) 分類影像 (3) 正確傳送分類後的影像資訊 D. 影像展示子系統的需求規格完成度(100%) (1) 系統將分類後的影像資訊編碼成一般標準格式的影像檔 (2) 系統能將分類結果顯示在監視器上
技術方案優越性
本計畫乃發展出適合車用開放軟體系統使用的低運算量(low-complexity)行人偵測技術 核心-HOG,目前可應用於採用 C 語言的嵌入式系統平台、個人電腦,也可應用於採用 Google Android 系統的手機或手持式裝置(例如:平板電腦)。由於核心的低運算複雜度,因此可推 廣應用於許多具有價格考量的消費性電子產品上。9
參考文獻
[1] A. Broggi, M. Bertozzi, A. Fascioli, and M. Sechi, “Shape-based pedestrian detection,” in
Proceedings of IEEE Intelligent Vehicles Symposium(IVS), pp. 215-219, 2000.
[2] Tao Zhao, Ram Nevatia, and Bo Wu, “Segmentation and tracking of multiple human in crowded environments,” in IEEE Transactions on Pattern Analysis and Machine
Intelligence(TPAMI), vol. 30, pp. 1198-1211, 2007.
[3] D. M. Gavrila, “Multi-cue pedestrian detection and tracking from a moving vehicle,” in
International Journal of Computer Vision(IJCV), vol. 73, pp. 41-59, June 2007.
[4] D. M. Gavrila,“Pedestrian detection from a moving vehicle,” in Proceedings of the
European Conference on Computer Vision Part II (ECCV), 2000.
[5] F. Suard, A. Rakotomamonjy, A. Bensrhair and A. Broggi, “Pedestrian detection using infrared image and histogram of oriented gradients,” in IEEE Intelligent Vehicles
Symposium(IVS), pp. 206-212, 2006.
[6] N. Dalal and B. Triggs, “Histograms of oriented gradients for human detection”, in IEEE
Conference on Computer Vision and Pattern Recognition(CVPR), vol. 1, pp. 886-893, 2005.
[7] M. Bertozzi, A. Broggi, M. Del Rose, M. Felisa, A. Rakotomamonjy and F. Suard, “A pedestrian detector using histograms of oriented gradients and a support vector machine classifier,” in IEEE Transactions on Intelligent Transportation Systems(TITS), pp. 143-148, 2007.
[8] 林莉鳳, “Rapid pedestrian detection for driving assistance system using AdaBoost and template matching technique,” 國立中央大學資訊工程研究所, 台灣, 2007.
[9] Yu-Ting Chen and Chu-Song Chen, “Fast human detection using a novel boosted cascading structure with mata stages,” in IEEE Transactions on Image Processing(TIP), vol. 17, pp.1452-1464, 2008.
[10] Bastian Leibe, Edgar Seemann, and Bernt Schiele, “Pedestrian detection in crowded scenes,” in IEEE Transactions on Pattern Analysis and Machine Intelligence(TPAMI), vol. 1, pp. 878-885, 2005.
[11] A. Mohan, C. Papageorgiou, and T. Poggio, “Example-based object detection in images by components,” in IEEE Transactions on Pattern Analysis and Machine Intelligence(TPAMI), vol. 23, pp. 349-361, 2001.
[12] D. Ramanan, D. A. Forsyth, and A. Zisserman, “Tracking people by learning their appearance,” in IEEE Transactions on Pattern Analysis and Machine Intelligence(TPAMI), vol. 29, pp. 65-81, 2007.
[13] Ju Han and Bir Bhanu, “Individual recognition using gait energy image,” in IEEE
Transactions on Pattern Analysis and Machine Intelligence(TPAMI), vol.28, pp. 316-322,
2006.
[14] 彭振軒,“A passing people counting system using template matching technique,”國立中 央大學資訊工程研究所, 台灣, 2006.
[15] P. Viola, M. J. Jones, and D. Snow, “Detecting pedestrians using patterns of motion and appearance,” in IEEE International Conference on Computer Vision(ICCV), vol. 2, pp. 734-741, 2003.
[16] Y. Ran, Q. Zheng, I. Weiss, L. S. Davis, W. A. Almageed, and L. Zhao, “Pedestrian classification from moving platforms using cyclic motion pattern,” in IEEE International
Conference on Image Processing(ICIP), vol. 2, pp. 854-857, 2005.
10
IEEE Conference on Computer Vision and Pattern Recognition(CVPR), pp. 469-474, 1994.
[18] Chunhua Hu, Xudong Ma, Xianzhong Dai, “A robust person tracking and following approach for mobile robot,” in IEEE International Conference on Mechatronics and
Automation(ICMA), pp. 3571-3576, 2007.
[19] C. Papageorgiou and T. Poggio., “A trainable system for object detection,” in International
Journal of Computer Vision(IJCV), pp. 15-33, 2000.
[20] Q. Zhu, S. Avidan, M.-C. Yeh, and K.-T. Cheng, “Fast Human Detection Using a Cascade of Histograms of Oriented Gradients,” Proc. IEEE International Conference on Computer
Vision and Pattern Recognition, 2006.
[21] S. Y. Cheng, and M. M. Trivedi, “Vision-Based Infotainment User Determination by Hand Recognition for Driver Assistance,” IEEE Trans. Intelligent Transportation Systems, Vol. 11, No. 3, pp.759-764, Sept. 2010.
1
國科會補助專題研究計畫項下出席國際學術會議心得報告
日期:101 年 9 月 17 日一、參加會議經過
2012 第六屆
ICGEC 國際學術會議,於 101 年 8 月 25 日至 101 年 8 月
28 日在日本北九州市舉行,總共有約三百位來自世界各地的學界及業界的專
家學者參與。此次會議主要討論的議題共計有 19 項,如下所示:
1. Innovative Intelligent Multimedia Computing
2. Evolutionary Computation in Vision, Image, and Signal Processing
3. Medical Physics, Medical Informatics, Medical Electronics
4. Artificial Intelligence Applications for Eservices
5. Multimedia and Cloud Computing Security
6. Advances in Information Security
7. Hybrid Evolutionary Algorithms in Forecasting Models
8. Ubiquitous Biomedical Systems and Applications
9. Innovative Mobile Services
10. High Speed Computation and Applications in Information Security Systems
11. Innovation in Computer Networking
12. Intelligent Computing and Its Applications in Multimedia
13. Evolutionary and Intelligent Computing in Social Networks
14. Intelligent Applications for Home and Medical Treatment
計畫編號
NSC 100-2218-E-151-006
計畫名稱
應用於智慧型車用輔助系統之行人偵測技術的設計與實現
出國人員
姓名
連志原、楊富仲
服務機構
及職稱
國立高雄應用科技大學
電子工程系 助理教授
會議時間
101 年 8 月 25 日至
101 年 8 月 28 日
會議地點
日本北九州市
會議名稱
(中文) 2012 第六屆
ICGEC 國際學術會議
(英文) The Sixth International Conference on Genetic and
Evolutionary Computing
(ICGEC-2012)發表論文
題目
(中文) 一個有效的影像除霧方法
(英文)
An Efficient Image Dehazing Method2
15. Multimedia Innovative Computing
16. Intelligent Video Processing
17. Security Techniques and Applications
18. Integrated Systems Engineering
19. Innovative Computing and Its Applications
等皆為影像、訊號、多媒體與創新計算領域裡相當重要或是嶄新的議題。會
中除了有相關的論文發表外,更邀請了數位專家學者進行 invited talk,與會
者可依需要,參加自己所關心的專題報告討論。
3
二、與會心得
此次在 Kitakyushu 參加的 2012
ICGEC 國際學術會議議題相當廣泛,個
人 在這幾 天的會議 議程中 有發表一 篇會議 論文,屬 於 Intelligent Video
Processing 領域,個人上台報告過程中有與幾位學者交換研究內容與相關經
驗。此外,個人也選了幾個特別有興趣的主題參與討論,其中有一些關於影
像與視訊處理的技術與應用,是個人最感興趣的。
經由這次會議的實際參與,不但得以認識一些相關領域之學者專家,互
相交換研究心得,更吸收到許多關於影像與多媒體相關的最新技術與資訊,
對日後在研究上,將大有所助益。個人非常感謝國科會的補助,才能夠出席
參加此次國際性會議。
三、考察參觀活動(無是項活動者略)
略
四、建議
無
五、攜回資料名稱及內容
研討會論文集、摘要論文集
六、其他
無
國科會補助計畫衍生研發成果推廣資料表
日期:2013/01/30國科會補助計畫
計畫名稱: 應用於智慧型車用輔助系統之行人偵測技術的設計與實現 計畫主持人: 連志原 計畫編號: 100-2218-E-151-006- 學門領域: 推動計畫-開放軟體無研發成果推廣資料
100 年度專題研究計畫研究成果彙整表
計畫主持人:連志原 計畫編號: 100-2218-E-151-006-計畫名稱:應用於智慧型車用輔助系統之行人偵測技術的設計與實現 量化 成果項目 實際已達成 數(被接受 或已發表) 預期總達成 數(含實際已 達成數) 本計畫實 際貢獻百 分比 單位 備 註 ( 質 化 說 明:如 數 個 計 畫 共 同 成 果、成 果 列 為 該 期 刊 之 封 面 故 事 ... 等) 期刊論文 0 0 100% 研究報告/技術報告 0 0 100% 研討會論文 0 0 100% 篇 論文著作 專書 0 0 100% 申請中件數 0 0 100% 專利 已獲得件數 0 0 100% 件 件數 0 0 100% 件 技術移轉 權利金 0 0 100% 千元 碩士生 2 2 100% 博士生 1 1 100% 博士後研究員 0 0 100% 國內 參與計畫人力 (本國籍) 專任助理 0 0 100% 人次 期刊論文 0 0 100% 研究報告/技術報告 0 0 100% 研討會論文 1 1 100% 篇 論文著作 專書 0 0 100% 章/本 申請中件數 0 0 100% 專利 已獲得件數 0 0 100% 件 件數 0 0 100% 件 技術移轉 權利金 0 0 100% 千元 碩士生 0 0 100% 博士生 0 0 100% 博士後研究員 0 0 100% 國外 參與計畫人力 (外國籍) 專任助理 0 0 100% 人次其他成果
(
無法以量化表達之成 果如辦理學術活動、獲 得獎項、重要國際合 作、研究成果國際影響 力及其他協助產業技 術發展之具體效益事 項等,請以文字敘述填 列。) 無 成果項目 量化 名稱或內容性質簡述 測驗工具(含質性與量性) 0 課程/模組 0 電腦及網路系統或工具 0 教材 0 舉辦之活動/競賽 0 研討會/工作坊 0 電子報、網站 0 科 教 處 計 畫 加 填 項 目 計畫成果推廣之參與(閱聽)人數 0國科會補助專題研究計畫成果報告自評表
請就研究內容與原計畫相符程度、達成預期目標情況、研究成果之學術或應用價
值(簡要敘述成果所代表之意義、價值、影響或進一步發展之可能性)
、是否適
合在學術期刊發表或申請專利、主要發現或其他有關價值等,作一綜合評估。
1. 請就研究內容與原計畫相符程度、達成預期目標情況作一綜合評估
■達成目標
□未達成目標(請說明,以 100 字為限)
□實驗失敗
□因故實驗中斷
□其他原因
說明:
2. 研究成果在學術期刊發表或申請專利等情形:
論文:□已發表 □未發表之文稿 ■撰寫中 □無
專利:□已獲得 □申請中 ■無
技轉:□已技轉 □洽談中 ■無
其他:(以 100 字為限)
3. 請依學術成就、技術創新、社會影響等方面,評估研究成果之學術或應用價
值(簡要敘述成果所代表之意義、價值、影響或進一步發展之可能性)(以
500 字為限)
本計畫主要是發展出適合車用安全輔助系統的行人偵測技術,針對行人偵測的核心重要技 術 - 梯度方向直方圖(Histograms of Oriented Gradients, HOG) 技術,進行實作與研 究,並依 open source 的精神免費提供完整的程式給社群使用。全程計畫的執行將依循 CMMI 流程管理模式,由需求分析、專案規劃,開發設計,整合測試等階段流程逐一進行。 此系統可應用於採用 C 語言的嵌入式系統平台、個人電腦,也可應用於採用 Google Android 系統的手機或手持式裝置(例如:平板電腦)。由於核心的低運算複雜度,因此可推廣應用 於許多具有價格考量的消費性電子產品上。希望此一計畫的實行,可以促進數位車用電子 技術的升級與普及應用,並能提昇汽車駕乘的安全性。 參與之工作人員預期可獲得之訓練: (1) 瞭解現有的影像辨識的相關技術。 (2) 學習並獲得有關行人偵測的相關技術及經驗。 (3) 學習效能評估的能力。 (4) 學習演算法的設計流程。 (5) 培養程式設計與程式最佳化的能力。 (6) 學習系統驗證、測試的流程。 (7) 學習 Light-Weight CMMI 規範。研究成果之貢獻: (1) 提昇我國在開放軟體的研發能量。 (2) 為國家儲備車用電子與系統架構的設計人才。 (3) 為國家儲備影像與視訊處理的設計人才。 (4) 提昇我國車載系統之安全與便利性。 (5) 為國家儲備軟體設計的人才。 (6) 培育開放軟體產業所需之工程科技與創意人才。 (7) 營造台灣學術界建構開放軟體社群的風氣與環境。