國 立 交 通 大 學
電信工程學系
碩 士 論 文
同步化單對線數位用戶迴路接收端之
初始化時脈
The Start-up Timing Recovery on Single-Pair
High-Speed Digital Subscriber Line (SHDSL) Receiver
研 究 生:賴 俊 傑
指導教授:紀 翔 峰 博士
國
立
交
通
大
學
電 信 工 程 學 系
碩
士
論
文
同步化單對線數位用戶迴路接收端之
初始化時脈
The Start-up Timing Recovery on Single-Pair High-Speed
Digital Subscriber Line (SHDSL) Receiver
研 究 生:賴俊傑 Student: Jun-Jie Lai
指導教授:紀翔峰 博士 Advisor: Dr. Hsiang-Feng Chi
同步化單對線數位用戶迴路接收端之初始化時脈
The Start-up Timing Recovery on Single-Pair High-Speed
Digital Subscriber Line (SHDSL) Receiver
研 究 生:賴俊傑 Student: Jun-Jie Lai
指導教授:紀翔峰 博士 Advisor: Dr. Hsiang-Feng Chi
國立交通大學
電信工程學系碩士班
碩士論文
A Thesis
Submitted to Institute of Communication
College of Engineering
National Chiao Tung University
in partial Fulfillment of the Requirements
for the Degree of
Master
in
Communication Engineering
June 2005
同步化單對線數位用戶迴路接收端之初始化時脈
學生:賴俊傑
指導教授:紀翔峰 博士
國立交通大學電信工程學系碩士班
摘 要
本文主要藉由G994.1所規範的握持程序探討SHDSL時脈恢復工作,G994.1主要 彈性地對各個不同xDSL的傳接器在初始化的程序統一規範。由於SHDSL使用單對銅線 傳輸其載波頻率為單一頻率,為了實現此一傳輸協定之時脈恢復工作,我們提出以非線 性產生光譜線無資料輔助的方式來作為同步化設計依據,設計的方式以純數位化的方式 不需額外的控制電路調整真實時脈的取樣速度,我們所提出時脈復原的架構其中包含交 織插補濾波器來做數位化重新取樣運算、前置濾波器過濾雜訊及降低取樣輸出速度、時 脈誤差偵測器計算時脈誤差資訊、鎖相迴路抑制收斂時脈誤差的偏移。當完成時脈復原 工作後,最後便是將G994.1傳輸資訊的內容解碼譯出成原始資料。 接收端於初始啟動階段要做時脈復原、等化器、迴響消除、相聲穿越等工作,主要 分成前置啟動部份與啟動部份兩段,前置啟動部份主要藉由G994.1握持程序將系統的時 脈粗調與相關的補償工作,此期間除需完成補償工作外時脈誤差必須在±50ppm以內, 到啟動部份進入資料模式必須將時脈鎖住到更小誤差範圍,此誤差範圍與補償工作影響 重大,本文實際以C語言模擬定點實現方式,在完全不做任何補償工作的情況下,成功 在前置啟動階段即完成時脈恢復工作達±50ppm誤差要求範圍內,若是要進一步改善時脈同步化的精確度可增加各端輸出位元,而時脈偏移率將可達到約±10ppm,此一結果 將有助於接收器分配更多的時間專注於調整補償工作。
The Start-up Timing Recovery on Single-Pair High-Speed
Digital Subscriber Line (SHDSL) Receivers
Student: Jun-Jie Lai
A d v i so r : D r. H s ia n g - F e n g C h i
Institute of Communication Engineering
National Chiao Tung University
Abstract
We will confer the timing recovery of the SHDSL by the Recommendation G994.1 handshake procedure. This Recommendation provides a flexible mechanism for various Digital Subscriber Line (DSL) transceivers at the start-up procedure. SHDSL technology was available over a single pair copper line with single tone carrier frequency, for the implement of the timing recovery by the Recommendation, we provide architecture that base on the Non-linear Spectral Line method and non-data aided with all-digital way without additional control circuit adjusting the real clock timing. Including of Digital Interpolator for digitally resampling, Prefilter for filtering noise and downing the throughput, Timing Error Detector for computing the timing error information, Phase Lock Loop for the convergence of timing error offset. After achieving timing recovery, we will decode and recover G994.1 transmitting data.
procedure of the receiver. There are two major parts that are pre-activation and activation part. In the pre-activation part, the system of the timing clock should have coarse adjustment by the G994.1 procedure and fine compensations. During the period, not only the compensations will be well operated but the clock offset shall be within ±50ppm. After entering activation procedure and data mode, the clock offset should be locked in a small error range more. The compensation works will be deeply impact on the error range. In this thesis, the fixed-point implement was simulated on C language. Without doing any compensation, we successfully recover the timing error with the demand for ±50ppm clock offset range at the pre-activation process. With using more bits on each stage of the output, we can promote the accuracy of the clock and reduce its offset range to ±10ppm. The result will help receiver to have more time to do other compensation works.
誌 謝
此篇論文的完成首先要感謝我的指導教授-紀翔峰老師,謝謝老師這二年來不怨其 煩指導笨拙學生的我,曾經一度失望的我因為老師的鼓勵與執著,使的我重拾信心繼 續邁進,可以說老師比我還要認真!沒有老師的輔助指導便沒有這篇論文誕生。再來 是感謝父母的殷切盼望,他們對我的期望從不曾失落過,一路走來始終如一,我唯一 所能做的事就是抱持最大的感激,最後是謝謝所有實驗的同學們,你們歡樂的氣氛時 常在無形中給了我很大的幫助,謝謝各位、謝謝大家。目 錄
中文摘要... i
英文摘要(English Abstract)... iii
誌謝 ... v 目錄 ... vi 表目錄... ix 圖目錄... x 第一章 序論 ... 1 1.1 DSL 簡介... 1 1.2 論文動機 ... 6 1.3 論文組織 ... 7
第二章 G994.1 握持程序與規範(Handshake Procedure and specification) ... 8
2.1 系統簡介 ... 8 2.2 信號與調變 ... 10 2.2.1 信號種類 ... 11 2.2.2 調變方式 ... 12 2.3 接收端握持程序... 13 2.4 SHDSL 接收器所提出之握持程序架構 ... 15 第三章 SHDSL 接收器時脈復原之設計與 G994.1 之資料解碼(Data Decoder)... 17 3.1 時脈復原之分類... 17
3.3 時脈復原之系統架構 ... 24
3.3.1 前置濾波器(Prefilter) ... 24
3.3.2 時脈誤差偵測器(Timing Error Detector) ... 25
3.3.3 鎖相迴路(Phase Lock Loop) ... 27
3.3.4 數位化重新取樣器之設計... 28 3.3.4.1 重新取樣器之時脈迴路(Timing Loop)... 28 3.3.4.2 交織插補方式(Interpolation Method)... 29 3.4 G994.1 調變之資料解譯 (Datum Decoding) ... 31 第四章 定點運算之實現... 36 4.1 各參數定點表示式... 36
4.1.1 插補端之實現(Interpolation Output Implementation) ... 36
4.1.2 平方器之實現(Squarer Output Implementation) ... 37
4.1.3 弦波乘法端之實現(Sinusoidal Multiplier Output Implementation)... 38
4.1.4 帶通濾波器端之實現 ... 39 4.1.5 平均動差(Moving Average)濾波端之實現 ... 40 4.1.6 取虛部信號端之實現 ... 41 4.1.7 迴路濾波器(Loop Filter)端之實現 ... 42 4.1.8 各輸出端之模擬比較圖 ... 43 第五章 模擬結果與檢討... 52
5.1 通道模型與模擬參數 (Channel Model and Simulation Parameter)... 52
5.1.2 帶通濾波器... 53
5.1.3 平均動差濾波器(Moving Average Filter) ... 53
5.1.4 迴路濾波器(Loop Filter) ... 54
5.2 結果與檢討 ... 54
第六章 未來展望 ... 63
表 目 錄
表 1.1 16 階 PAM 對應表 ... 5 表 2.1 攪拌器多項式(Scrambler Polynomials) ... 9 表 2.2 G994.1 輸出對映表 ... 9 表 2.3 4.3125kHz 信號群組的載波集合 ... 11 表 2.4 4kHz 信號群組的載波集合... 11圖 目 錄
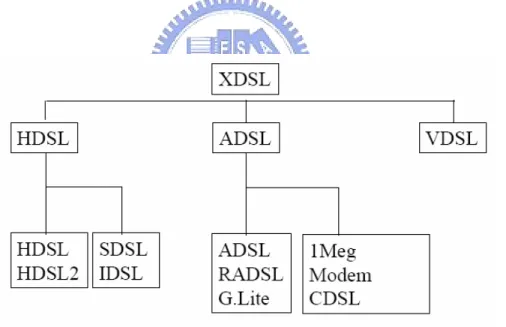
圖 1.1 xDSL 系統發展圖 ... 1
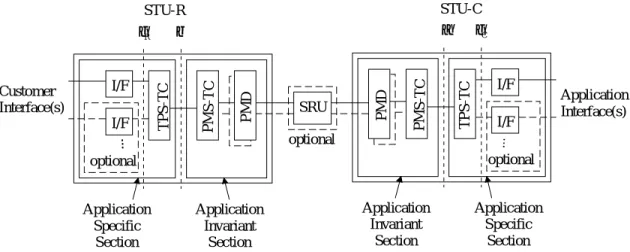
圖 1.2 SHDSL Transceiver Unit (STU)功能區塊圖 ... 3
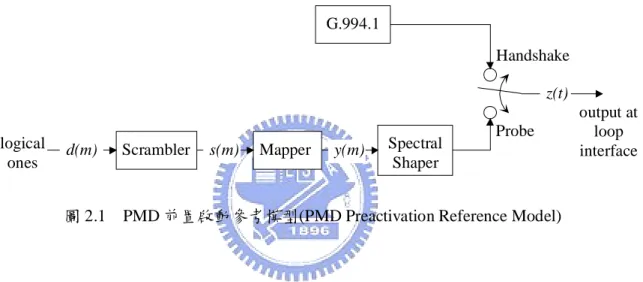
圖 2.1 PMD 前置啟動參考模型(PMD Preactivation Reference Model) ... 8
圖 2.2 G994.1 信號產生圖 ... 10 圖 2.3 接收端初使化啟動程序 ... 14 圖 2.4 SHDSL 接收器架構圖 ... 15 圖 3.1 類比式時脈復原圖 ... 17 圖 3.2 混合式時脈復原圖 ... 18 圖 3.3 數位式時脈復原圖 ... 18 圖 3.4 無資訊輔助方式 ... 19 圖 3.5 資訊輔助方式 ... 20 圖 3.6(a) 產生光譜線(α =0.2) ... 23 圖 3.6(b) 產生光譜線(α =1) ... 23 圖 3.7 SHDSL 時脈復原方塊圖... 24 圖 3.8(a) 前置濾波器 ... 24 圖 3.8(a-1) 前置濾波器頻率響應(L=8) ... 25 圖 3.8(b) 時脈誤差偵測器 ... 25 圖 3.8(c):數位化重新取樣器 ... 28
圖 3.9 G994.1 資料解碼功能圖 ... 32 圖 3.10(a) Cosine 表與平方器輸出比較圖 ... 33 圖 3.10(b)
[
]
∑
= + − ⋅ = 26 1 ] 1 ) 26 , [mod( ) ( ) ( ), ( l n l c l w n w n c f ... 34 圖 3.10(c) Cosine 表、平方器輸出與取樣輸出三者曲線圖 ... 35 圖 4.1 各點輸出之定點表示圖 ... 36 圖 4.2 簡易低通濾波器(L=8) ... 37 圖 4.3 平方器輸出端 ... 37 圖 4.4 弦波輸出端 ... 39 圖 4.5 帶通濾波器架構圖... 40 圖 4.6 平均動差濾波器架構圖 ... 41 圖 4.7 虛部信號端 ... 41 圖 4.8 迴路濾波器架構圖... 43 圖 4.9a-1 I[n],Q[n],yi[n],yq[n],K1/10、0.0078K 、2 0 K ... 44 .2 3 圖 4.9a-2 mi[n],mq[n],K1/10、0.0078K 、2 0 K ... 44 .2 3 圖 4.9a-3 me[n],e[n],K1/10、0.0078K 、2 0 K ... 45 .2 3 圖 4.9b-1 I[n],Q[n],yi[n],yq[n],K1/10、0.0078K 、2 0 K ... 45 .2 3 圖 4.9b-2 mi[n],mq[n],K1/10、0.0078K 、2 0 K ... 46 .2 3 圖 4.9b-3 me[n],e[n],K1/10、0.0078K 、2 0 K ... 46 .2 3 圖 4.9c-1 I[n],Q[n],yi[n],yq[n],K1/100、0.0078K 、2 0 K ... 47 .2 3 圖 4.9c-2 mi[n],mq[n],K1/100、0.0078K 、2 0 K ... 47 .2 3 圖 4.9c-3 me[n],e[n],K1/100、0.0078K 、2 0 K ... 48 .2 3圖 4.9d-1 I[n],Q[n],yi[n],yq[n],K1/100、0.0078K2/4、0.2K3/10 ... 48 圖 4.9d-2 mi[n],mq[n],K1/100、0.0078K2/4、0.2K3/10... 49 圖 4.9d-3 me[n],e[n],K1/100、0.0078K2/4、0.2K3/10 ... 49 圖 4.9e-1 I[n],Q[n],yi[n],yq[n],K1/100、0.0078K2/3、0.2K3/10 ... 50 圖 4.9e-2 mi[n],mq[n],K1/100、0.0078K2/3、0.2K3/10... 50 圖 4.9e-3 me[n],e[n],K1/100、0.0078K2/3、0.2K3/10... 51 圖 5.1 通道頻率響應圖 ... 52 圖 5.2 平均移動濾波器作用圖 ... 53 圖 5.3 迴路濾波器作用圖 ... 54 圖 5.4 時脈誤差修正圖 ... 55 圖 5.5a 時脈誤差修正圖 ... 56 圖 5.5b 時脈誤差修正圖 ... 57 圖 5.5c 時脈誤差修正圖 ... 58 圖 5.5d 時脈誤差修正圖 ... 59 圖 5.5e 時脈誤差修正圖 ... 60 圖 5.6a 傳送端與接收端解碼資料部份比較圖 ... 61 圖 5.6b 傳送端與接收端解碼資料整個比較圖 ... 62
第一章 序論
1.1 DSL 簡介
DSL 即是 Digital Subscriber Line 或者稱作數位用戶線路,它屬於一種長途電信有 線 傳 輸 技 術 , 此 技 術 發 展 乃 藉 由 大 眾 交 換 電 話 網 路 (Public Switched Telephone Network(PSTN))所使用的銅軸線來傳遞資訊。PSTN 或者稱作普通老式的電話服務 (Plain Old Telephone Service(POTS))至今以來仍是目前分布最廣的網絡,能充分且有 效的利用便可大大的提升網絡的普遍性,隨處皆可享受網絡所帶來龐大的應用與服 務,而 xDSL 傳輸技術便因此目的而產生,底下是目前各個 DSL 發展衍生的種類:
圖 1.1 xDSL 系統發展圖
DSL 主要是為了因應各種不同傳輸速度與距離的需求而發展出各種不同的傳輸 協定,以下概要介紹 DSL 的種類及應用方向:
n VDSL(Very high-bitrate DSL):其下行速度有 6.5、13、26、52Mbps,下行速度
為 1.6、3.3、6.5、13Mbps,距離由 1 至 4.5Kft.,主要應用在多媒體方面,使 用 ATM 傳輸協定。
n ADSL(Symmetric High-Bitrate Digital Subscriber Line):傳輸速度下載 0.5 至
8Mbps 上傳 64 至 64Kbps,傳輸距離為 12 至 18kft.,支援 1 到 4 MPEG 單一影 像通道、BRA-ISDN 電路、對稱性 ISDN H0 通道(384Kbps)、64Kbps 雙向控制 通道和一個 POTS 電路。 n ADSL Lite:其最高下載速度 1Mbps 上傳速度 128Kbps,唯一的優點是不需分 離器(Splitter),由於較低的數位傳輸率可以用在公共網路建設上包含 POTS, 是目前最普遍使用的一種。 n RADSL(Rate Adaptive DSL):其速度可變化調整,下行速度為 12Mbps,上行 速度為 1Mbps,而距離為 12 至 18Kft.,由中央處理端調整適當的速度,從 ADSL 進化成另一種技術,同樣包含 POTS。 n CDSL(Consumer DSL):下行速度可到 1Mbps,上行速度達 16 至 128Kbps,與 ADSL 和 RDSL 相像,使用單對線而且用戶端不需分離器,可以直接架線(wire)。
n HDSL(High-Bitrate Digital Subscriber Line):用 2 對線或是 3 對線做傳輸,其上、
下行傳輸率最高皆為 1.544Mbps 和 2.048Mbps 兩種方式,傳輸距離 12Kft.,全 雙工模式,用在 T1 或者 E1 高速網路上。
n HDSL2:用單對線做傳輸,其上、下行傳輸率最高皆為 1.544Mbps 一種,最大
距離同樣為 12Kft.,僅用單對線達 T1 對稱性傳輸速度。
n SDSL(Symmetric DSL):其上、下行速度為 12Kbps 至 1.024Mbps,一般來說其 設定在 768Kbps,根據傳輸速度不同其距離為 11.5 到 22Kft.,對稱性傳輸方式 本質上提供 DSL 速率的一半,包含 POTS。 目前對於數位用戶迴路的傳接器,國際電信聯盟 ( International Telecommunication Union ( ITU ) ) 就 其 中 的 交 換 能 力 和共 用 模 式 操 作方 式 建議 了 相關 的 規範 ― G994.1。隨科技的進步各式各樣的傳輸技術因應而生,伺服端與用戶端彼此要能分辨 對方所使用傳輸種類與方式,因此必須要有統一的規範區分清楚。 本文主要在探討 SDSL 傳輸協定裡初始化時脈的復原,SDSL 或者也稱作 SHDSL 對稱性高速數位用戶迴路(Symmetric High-Bitrate Digital Subscriber Line),而 G994.1 的 目 的 便 是 在 整 合 了 目 前 G.991.2(SDSL), G.992.1(ADSL), G.992.2(ADSL Lite), G.992.3(ADSL2), G.992.4 和 G.992.5(ADSL2+)傳輸協定中牽涉到系統啟動階段的部 份,可以預期未來發展的數位用戶迴路也將採納使用此規範,成為全球共通遵循的依 據。底下就 SHDSL 系統簡單介紹: P M S -T C P M D T P S -T C I/F I/F .. . optional Customer Interface(s) γR β STU-R Application Specific Section Application Invariant Section P M S -TC P M D T P S -T C I/F I/F optional Application Interface(s) γC α STU-C Application Specific Section Application Invariant Section SRU optional
圖 1.2 所示的是 SHDSL 傳接器(SHDSL Transceiver Unit (STU)) 在伺服端 (STU-Remote)與用戶端(STU-Client)各區塊其運作的功能與介面,兩端皆包含常規應 用部分(Application Invariant Section)和特殊應用部分(Application Specific Section)。 常規應用部分包含搭載實體媒介(Physical Media Dependent (PMD))和在傳輸聚合層 內特定實體媒介 (Physical Media-Specific Transmission Convergence Layer (PMS-TC Layer)) , 而 特 殊 應 用 部 分 則 使 用 在 傳 輸 聚 合 層 的 特 殊 傳 輸 協 定 (Transmission Protocol-Specific Transmission Convergence Layer (TPS-TC Layer))和周邊介面,如圖 所示此部份也可相容其他的傳輸信號,即理論上可適用不同的傳輸協定。SHDSL 中 繼器(SHDSL Regenerator Unit (SRU))為減少信號衰減。
PMD 主要的功能:
1. 產生信號時脈及復原(Timing generation and recovery) 2. 編碼及解碼(coding and decoding)
3. 調變與解調(modulation and demodulation) 4. 消除回響(echo cancellation)
5. 等化器(equalizer) 6. 起始連結(link startup)
PMS-TC Layer 主要是做框架與框架同步(framing and frame synchronization)和 譯碼與解譯(Scrambler and descrambler),先將資料依據 SHDSL 框架的結構產生實際 要傳輸的數據,再將此數據編譯輸出。
方式為: 0000 -15/16 0001 -13/16 0010 -11/16 0011 -9/16 0100 -7/16 0101 -5/16 0110 -3/16 0111 -1/16 1100 1/16 1101 3/16 1110 5/16 1111 7/16 1000 9/16 1001 11/16 1010 13/16 1011 15/16 表 1.1 16 階 PAM 對應表 TPS-TC Layer 將每筆 SHDSL 的框架以大量封包傳送出去,此部份包含多工器及 解多工器,若是多重通道使用者則還需做劃時多工分配。 通常在伺服端只負責資料傳遞工作,而用戶端為了能接收正確資料必須要知道伺 服端的取樣速率,所以同步化便是傳接器啟動時最先要完成的事,兩端系統在做連結 時,PMD 區塊為彼此最先啟動的部份,其中產生信號時脈及復原為首要任務。
1.2 論文動機
在[1]中提出作同步化初始時脈時必須減少其他外來的操作避免時脈會有漂移現 象,他提出將時脈復原機制分成前後兩段進行,前半端部分時脈復原機制與通道等化 器分開運行,恢復時脈是為了要能正確取樣出數據以便得出邏輯’1’或是邏輯’0’,而通 道等化器為了補償通道效應會調整信號的訊雜比恢復其原本邏輯’1’或是邏輯’0’,同時 運行將造成不可預測的相互影響,因此前半段主要是在讓通道等化器完成整個調整工 作,而時脈做略微的粗調,後半段才算真正開始整個時脈復原機制,將通道等化器納 入整個時脈迴路。若是我們在前半段就能完成整個時脈復原的程序達到理想的精確 度,系統便能有更多的時間拿去做 channel equalization、echo cancellation、crosstalk cancellation、data decoding 等的工作,將可提升改善整個傳輸系統的使用環境降低錯 誤率。 本文將就 G994.1 於單對線數位用戶迴路規格作一研究設計,設計方式採全數位化 方式,接收端的時脈保持固定不變並使之與傳送端有一偏移誤差存在,以數位化重新 取樣器調整接收端之取樣頻率來與傳送端同步化並達一定的精確度並且能解出傳送端 發送的資料。1.3 論文組織
G994.1 規範中主要對數位用戶迴路的傳接器有關握持程序做出建議,而其中時脈 復原部分即本文所要探討的重點,藉由 G994.1 的傳輸方式及調變模式來獲得時脈資 訊。第二章介紹 G994.1 所建議的系統架構及規範,藉此一架構出本次實驗的系統方塊 圖,SHDSL 為單頻調變方式,用 G994.1 的調變信號來作為要恢復時脈的信號以期能 達到誤差要求。第三章為如何做時脈同步的演算法設計,因為在一開始尚未能作通道 等化器及消除回響等等,作握持程序時無法使用資料培訓(data training),本文將用直 接產生線光譜方法來做時脈誤差偵測,並且為非資料輔助(Non-Data Aided)方式,因此 不會有誤差蔓延(Error Propagation)的問題產生。接著為數位化重新取樣器,計算由時 脈誤差偵測器所得之誤差值,將接收端的信號經過交織插補方式(Interpolation Method) 計算出正確的取樣值。第四章將以定點(fixed-point)方式實際模擬整個時脈偵測迴路, 盡量在符合 G994.1 時脈精確度(±50ppm)的要求下減低各輸出端所使用的位元以符合 經濟效益,於最後一章則是比較接收端與傳送端之時脈的誤差範圍,最後檢討未來可 能改進的空間。第二章 G994.1 握持程序與規範(Handshake Procedure
and specification)
2.1 系統簡介
本節主要在探討 G994.1 對 PMD 初始啟動(Preactivation)階段時脈回復的部份,期 能在一定收歛時間內達到 50ppm 誤差標準規範以內。
Scrambler Mapper Spectral
Shaper output at loop interface s(m) y(m) z(t) d(m) logical ones G.994.1 Probe Handshake
圖 2.1 PMD 前置啟動參考模型(PMD Preactivation Reference Model)
時間指標 m 表示符號率(symbol rate),t 是類比時間,探測訊號(probe signal)為 2-PAM 調變,所以位元率等於符號率,d(m)信號為連續邏輯一(logical ones)即輸入高 阻抗給 Scrambler,Scrambler 輸出信號為 s(m),G994.1 對其 Scrambler Polynomials 的 建議如表 2.1 內所表示,傳送端要能支援表 2.1 所有的 polynomials,選用何組 polynomial 由接收端在 G994.1 程序內決定,一旦完成 G994.1 握持程序,傳送端與接收端將依照 所選擇的 polynomial 進入資料傳輸模式不會再更改。對映圖(Mapper)的輸出 y(m) 如 Table()內所表示,最後輸出 z(t)的頻譜塑型(spectral shaper)、符號率、間隔時間(duration) 及後端功率(power backoff)也是經由 G994.1 程序內所決定。
Polynomial Index (i2,i1,i0)
STU-C polynomial STU-R polynomial
0 0 0 s(m)=s(m−5)⊕s(m−23)⊕d(m) s(m)=s(m−18)⊕s(m−23)⊕d(m) 0 0 1 s(m)=s(m−1)⊕d(m) s(m)=s(m−1)⊕d(m) 0 1 0 s(m)=s(m−2)⊕s(m−5)⊕d(m) s(m)=s(m−3)⊕s(m−5)⊕d(m) 0 1 1 s(m)=s(m−1)⊕s(m−6)⊕d(m) s(m)=s(m−5)⊕s(m−6)⊕d(m) 1 0 0 s(m)=s(m−3)⊕s(m−7)⊕d(m) s(m)=s(m−4)⊕s(m−7)⊕d(m) 1 0 1 ) ( ) 8 ( ) 4 ( ) 3 ( ) 2 ( ) ( m d m s m s m s m s m s ⊕ − ⊕ − ⊕ − ⊕ − = ) ( ) 8 ( ) 6 ( ) 5 ( ) 4 ( ) ( m d m s m s m s m s m s ⊕ − ⊕ − ⊕ − ⊕ − = 1 1 0 Reserved Reserved
1 1 1 Not Allowed Not Allowed
表 2.1 攪拌器多項式(Scrambler Polynomials)
在 G994.1 中的前置啟動模式(preactivation mode)內的 scrambler 架構要與資料模式 (data mode)內的相同,由接收端決定何組 polynomial 來作握持程序,以期往後的資料 傳輸達到精確時脈同步,scrambler 內暫存器初使值皆設為零。
Scrambler Output s(m) Mapper Output Level, y(m) Data Mode Index
0 -9/16 0011
1 +9/16 1000
表 2.2 G994.1 輸出對映表
SHDSL 的編碼方式為 16-Trellis Code-PAM,所以 y(m)輸出 0 與 1 對映方式必須與 原本 16 個指標相對應。
總括來說 G994.1 程序於伺服端所要做的事與在資料傳輸模式類似,先將資料經由 框架的定義編碼產生,再將其編碼過後的數據經過 Scrambler 輸出,對照對映圖轉成
類比形式,最後將信號調變傳送出去。 圖 2.2 G994.1 信號產生圖 在 G994.1 規範中初始啟動階段是在做時脈的粗調以及編解碼,主要目標為接收端 之時脈誤差在±200ppm內以及經由解碼辨識對方所使用調變方式與操作模式,接著切 換至 SHDSL 的資料傳輸模式繼續將時脈鎖住到±50ppm以下。
2.2 信號與調變
每種 xDSL 的操作模式皆有制式化的載波方式,於各種操作模式下 G994.1 在作初 始傳遞程序時必須考慮各相關載波方式,即對某信號群組(signaling family)檢測所有可 能的載波方式來決定操作模式。 G994.1 雙工與半雙工載波信號傳遞模式相關定義於表 2.3 與表 2.4,不在此定義的 其他信號則不允許同時使用。符號率(symbol rate)和載波頻率(carrier frequency)可容許的誤差範圍,在伺服端為
±50 ppm,而在用戶端於握持程序初使化時為±200 ppm,於資料傳輸模式獲得時脈後
必需在±50 ppm 以內。
coder Scrambler Mapper Modulation
G994.1 signal generator
2.2.1 信號種類
n 4.3125kHz 信號群組(signaling family):
在 此 信 號 群 的 載 波 頻 率 為 N × 4.3125 kHz , N 為 整 數 , 符 號 率 則 為 4312.5/8 = 539.0625sym/sec。
Upstream carrier sets Downstream carrier sets
Frequency indices (N) Maximum power level/carrier (dBm) Frequency indices (N) Maximum power level/carrier (dBm) Transmission mode 9 17 25 –1.65 40 56 64 –3.65 duplex only 37 45 53 –1.65 72 88 96 –3.65 duplex only 7 9 –1.65 12 14 64 –3.65 duplex only 9 17 25 –1.65 72 88 96 –3.65 duplex only 表 2.3 4.3125kHz 信號群組的載波集合 n 4kHz 信號群組(signaling family): 在此信號群的載波頻率為 N × 4 kHz,N 為整數,符號率則為 4000/5 = 800sym/sec。 此信號群組只有一種載波方式。
Upstream carrier sets Downstream carrier sets
Frequency indices (N) Maximum power level/carrier (dBm) Frequency indices (N) Maximum power level/carrier (dBm) Transmission mode 3 +5 5 +5 half-duplex only 表 2.4 4kHz 信號群組的載波集合
2.2.2 調變方式
各 組 載 波 集 合 其 載 波 頻 率 的 調 變 方 式 皆 用 同 樣 的 調 變 方 式 ― Differentially encoded binary Phase Shift Keying (DPSK),若傳輸位元 1 則相位與前一位元旋轉 180°, 若傳輸位元 0 則相位與前一位元旋轉 0°。傳輸信號定義如下:
(
f
t
)
A
rect
(
t
nT
)
g
( )
t
t
s
n n i i i
∗
⋅
−
×
+
=
∑
cos
2
π
ϕ
∑
)
(
(1) ×表示乘法 *信號迴旋(signal convolution) ƒi所選擇載波頻率 ϕi載波相位為一任意定值 T 符號率 T =(8/4312.5)秒為 4.3125 kHz 信號群組而(5/4000)秒為 4 kHz 信號群組 An =+1 or –1 為 differentially encoded: An =An–1 若是 bn = 0 An =–An–1若是 bn = 1,bn表示每個 symbol 的位元rect(t) 方波形式(rectangular pulse shape): rect(t) =1 |t| < T/2;
=0 其他 g(t) 傳輸濾波器的脈衝響應
SHDSL 所使用調變的訊號為 4 kHz 信號群組,對於 4 kHz 信號群組為單一載波, 由於頻譜已被方波濾波調變整型,不須額外用傳輸濾波器來調整信號的頻譜。而在頻 率小於±4 kHz 的頻寬內要注意其振幅響應的變化量(rippple)要小於±0.5 dB 以及群延遲 (group delay)變化量應不超過載波頻率等等。
2.3 接收器握持程序
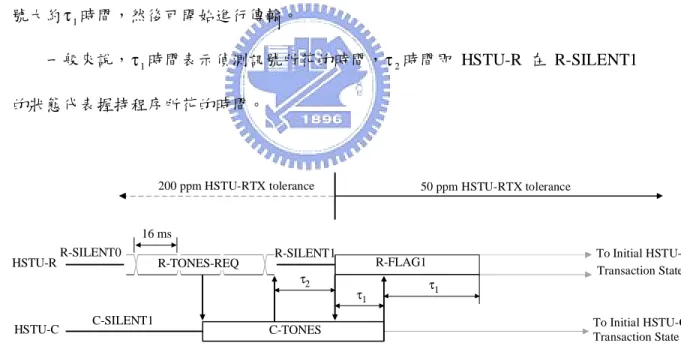
下圖 2.3 所展示的是 HSTU-R(Handshake STU-R)與 HSTU-C(Handshake STU-C)初 始化時脈的啟動部份,當開始做握持程序之前 HSTU-R 保持 R-SILENT0 傳輸靜止狀 態 HSTU-C 保持 R-SILENT1 傳輸靜止狀態,接著 HSTU-R 根據上述調變的種類與方 式發出一單頻的訊號(R-TONE-REQ)每 16ms 相位反轉一次,當 HSTU-C 偵測到此要求 信訊號時則根據調變的種類與模式發出 C-TONES 信號,當 HSTU-R 接到後則保持 R-SILENT1 狀態不做任何動作大約 50ms 至 500ms,在此期間便是時脈復原的運作最 後發送 R-FLAG1 信號,而偵測到 C-TONES 最短時間為 50ms,當 HSTU-C 偵測到 R-FLAG1 時則回應靜止訊號,當 HSTU-R 偵測到靜止訊號後則繼續維持 R-FLAG1 訊
號大約τ 時間,然後可開始進行傳輸。 1 一般來說,τ 時間表示偵測訊號所花的時間,1 τ 時間即 HSTU-R 在 R-SILENT12 的狀態代表握持程序所花的時間。 τ1 τ2 τ 1 T1531800-99 τ1 <500 ms 50 ms < τ2 <500 ms HSTU-R HSTU-C R-SILENT0
R-TONES-REQ R-SILENT1 R-FLAG1
C-TONES C-SILENT1
16 ms
200 ppm HSTU-RTX tolerance 50 ppm HSTU-RTX tolerance
To Initial HSTU-R Transaction State
To Initial HSTU-C Transaction State
2.4 SHDSL 接收器所提出握持程序之架構
s T 圖 2.4 SHDSL 接收器架構圖 n ADC: 純數位方式所以將輸入訊號以固定的時脈T 對信號取樣,此取樣速率與傳送端s 的時脈 T 在本次模擬保持在±400 ppm 的誤差內。由於模擬信號的輸出為數位離 散時間的形式並非實際的連續性信號,所以必須在接收端取樣後需作插補 (Interpolation)計算,以便模擬實際值,此即 ADC 區塊所需做的事。n Timing Error Detector:
此區塊於 G994.1 時脈復原程序下經由本次設計的演算法,計算出誤差取樣速率 給 Interpolation 區塊,每經過一次取樣間隔時間即再運算一次誤差值,最後達
到±50ppm之內,於第三章將提出一架構設計此區塊。
n Phase Lock Loop:
保持在一定的收斂區間並達一定的精確度。 n Interpolation Filter: Interpolation 區塊則再做一次插補計算以得到實際正確的資料,不同先前 ADC 區塊的地方,此區塊是根據偏移時脈取樣所得的值換算成實際修正過後時脈取 樣值,當在作定點運算時需判斷取樣時間差是否有溢位,若有則要考慮前一次 取樣值取捨的問題,其詳細部分將於下一章探討。 n Equalizer: 當完成 G994.1 握持程序且時脈達一定精確度時,此後便進入資料模式作通道等 化器並隨之持續時脈復原工作,雖然已在 G994.1 初始階段已完成時脈復原工 作,但隨著時間流逝此時脈誤差將漸漸地偏移,最終有可能超過同步所要求範 圍,因此當完成通道等化器工作時,將來我們仍必須持續做時脈復原工作以避 免錯誤發生,而通道等化器的好與壞將大大地影響時脈的精確度,未來如何調 整好通道等化器以便得到最佳的訊雜比為我們努力的方向之一。
n Data Mode Synchronizer:
當握持程序完成後,便是進入純粹資料模式實際傳送資料,其同步化方式例如: MMSE(Minimum Mean Square Error)時脈誤差偵測、M&M(Mueller and Muller)時脈 誤差偵測等演算法。此時可將時脈微調維持在更高的精準度。
第三章 時脈復原之設計
3.1 時脈復原之分類
在設計之前先來了解接收器如何做時脈復原,其通常由兩個部份組成,一是調整 時脈取樣時間部分,另一是偵測時脈誤差資訊部分,根據調整時脈取樣時間的修正方 式可分為三種: 1 類比方式 類比式接收器的方式是直接控制輸入訊號的取樣時間,其時脈將實際與傳送端達 成同步化,每當間隔一取樣時間便調整修正一次,因此接收器的處理速度要與輸入訊 號的符號率(Symbol rate)同步運行,由於是在連續性時間處理輸入的訊號,當在高速 傳輸時相對其接收器便須做更快的運算。 圖 3.1 類比式時脈復原圖 2 混合(類比/數位)方式 此種方式為上面的改良,相異之處在於接收器不在連續性時間處理輸入的訊號, 而是以數位的方法在連續性信號中將所需要的資訊取樣出來並只針對取樣點做運算, 藉由獲得時脈資訊實際去修正接收器的時脈,由於前端部分仍保有以類比信號去控制時脈震盪頻率,因此稱為混合方式。 圖 3.2 混合式時脈復原圖 3 數位方式 不做時脈取樣時間的調整,接收器只依照一顆石英震盪器其震盪頻率保持固定 值,並且不一定與傳送端的時脈相同,其同步的方式憑著非同步的取樣點作處理計算 出時脈資訊,因為接收器的時脈始終保持在偏移的狀態下,實際上並沒有在做時脈調 整動作,而是間接由演算法的設計計算出正確的取樣值,而雖然是全數位化但此種方 式所產生的另一個問題是在此偏移時脈作取樣時,由於整個傳輸通道的頻率響應,頻 寬不足將影響時脈資訊的獲得,此部分我們將於如何產生光譜線作說明。 圖 3.3 數位式時脈復原圖
而依照取樣時脈誤差值的估算方式可分為兩類: 1. 無資訊輔助 NDA(Non-Data Aided) 在做時脈誤差偵測時刪去信號中有關資料相依的部份直接去估算時脈誤差,誤差 值的估算將與信號的組成方式無關,因此不需考慮相位誤差的問題,此法適用在 M-QAM 和 M-PSK 調變信號。 s mT i kT N M MT Ti= s, ∈ m M k= / 圖 3.4 無資訊輔助方式 2. 資訊輔助 DA(Data Aided) 或稱做直接決策 DD(Decision Directed)接收端將取樣過後所得值經過決策判斷傳 輸的符號為何,用此判斷出來的結果去測試估算下一次取樣誤差,此法應用在當通道 等化器已補償相位誤差後,可增加決策判斷的正確率,此時再去估算取樣誤差。
s mT i kT N M MT Ti= s, ∈ m M k= / 圖 3.5 資訊輔助方式
3.2 產生光譜線之時脈同步器(Spectral Line Generating Clock
Synchronizer)
SHDSL 在做握持程序時使用 4kHz 訊號群組為單頻調變方式,所以 f 是固定頻i 率,便於分析假設載波相位ϕi =0,接收端的信號:(
2)
(
)
( ) cos ) (t ft A rectt mT g t r m m i ∗ × ⋅ − = π∑
(2) 再加上A 是 1、-1 數值的編碼方式,可重新寫成 n∑
− = m x m it A g t mT f t r() cos(2π ) ( ) (3) 其中gx(t)代表rect(t)與g(t)去做迴旋所得出之信號,考慮其隨機處理程序 )) ( ( ) (t f r t Z = (4) ) (⋅ f 為非線性運算子,通常Z(t)的平均值(mean-value),E[Z(t)]為一個非零且隨週期T 而有週期性的值。在頻譜的表現上我們可把E[Z(t)]想成是以1/T為鮑率(baud rate)所 產生的諧波所組成,藉由這種信號特性在此頻率以帶通濾波器取出此值,此稱作光譜 線時脈回復法(Spectral-Line Timing Recovery)。若是期望值r(t)在鮑率產生一光譜線,我們可直接通過帶通濾波器把信號取出得 到時派波形,此即是線性光譜線方式,但通常r(t)的期望值為零而高階次期望值(high moments)為週期性訊號。當 f(⋅)為非線性運算子時,此法稱為非線性光譜線方式。 以 f(⋅)=()2為例,不考慮雜訊影響,將接收端的信號經過平方器
∑
− − − = + n m x x n m m it A A g t mT g t mT nT f t r , 2 2 ) ( ) ( ) 2 ( cos ) ( π (5)若gx(t)是 raised-cosine 波形滿足 Nyquist criterion 如下式所示:
− = 2 ) / 2 ( 1 ) / cos( / ) / sin( ) ( T T t T t T t t g x απ απ π π , (6) : 1 0≤α ≤ 頻寬超越(excess bandwidth) 而其傅立葉轉換式 − − = ; 0 ; 2 sin 1 2 ; ) ( T T T T w Gx ω π α T T T T / ) 1 ( / ) 1 ( / ) 1 ( / ) 1 ( 0 π α ω π α ω π α π α ω + > + ≤ ≤ − − ≤ ≤ 則當接收端以取樣時間 T 對信號取樣,則r2(t)將簡化成 ) 2 ( cos ) 2 ( cos ) ( 2 , 2 2 nT fnT A A fnT r i n m n m m i π π =± =
∑
+ (7) 由上式(7)可知其頻譜表現上將在頻率為 0 以及2fi的地方產生光譜線,藉由光譜線的 產生獲得時脈資訊調整誤差。 通常由於傳輸通道的影響gx(t)並不一定是 Nyquist 波形,因此要能產生光譜線便 有條件上限制,接著說明當gx(t)不是 Nyquist 波形時的情況,對光譜線產生方式有何 影響。 首先假設在 w ≥πW時Gx(w)=0,因此gx(t−mT)gx(t−mT−nT)項為有限頻寬在 W w <2π ,若是要在w=2πk/T,k<WT 產生光譜線,則gx(t)的頻寬至少要超過1/2T頻率,否則我們只能得到在頻率為 0 光譜線,無法偵測出時脈資訊,當在T 取樣時間
對r2
( )
t 取樣。一般為了避免信號產生 ISI(Inter Symbol Interference)其傳輸頻寬都會大於1/2T,對於窄頻通訊會將gx(t)頻寬落在1/2T與1/T頻率之間,因此在平方器的輸 出端將會看到頻率 0 和1/T的光譜線。其分析式
( )
[ ]
[
( )
( )
]
(
)
(
)
− + − ⋅ − ⋅ =∑
∑
2 2 1 2 2 1 2 2 2 / 1 m x m x t mT A g t mT g A E A E t r E (8) 其中第二項(
)
∑
∑
⋅
=
−
m x m xt
T
m
j
T
m
G
T
mT
t
g
E
1
exp
2
π
(9) 當m≠0,Gx(
m/T)
=0,只有當m=0,E g(
t mT)
G( )
T m x = 0 / ∑
− 為一個定值與 時間無關,所以只有第一項與時間有關能在1/T頻率產生光譜線,為了增加該項偵測 值的大小,A 應避免長時間連續為一連串相同的符號,例如藉由攪拌碼(Scrambler)m 增加E( )
A2 −E(A12)的統計特性。平方器輸出端將產生以1/T整數倍頻率的弦波信號, 如下是所示: 2(
)
( )
(
( )
)
⋅
⋅
−
−
∞∫
∞ −t
f
j
t
T
j
dw
w
G
w
T
G
A
A
T
x xexp
2
2
i2
exp
2
2
1
Re
2 12π
π
π
π
(10) 此偵測值的大小與Gx(
2πT −w)
Gx( )
w 頻譜重疊的大小有關,當Gx( )
w 的頻寬超越1/2T 頻率越小,則產生的光譜線越不明顯。0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 -80 -60 -40 -20 0 20 40 60 80 100 120
Normalized Frequency (×π rad/sample)
M a g n itu d e ( d B ) Magnitude Response (dB) Spectrual Line 圖 3.6(a) 產生光譜線(α =0.2) 0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 -100 -80 -60 -40 -20 0 20 40 60 80 100
Normalized Frequency (×π rad/sample)
M a g n itu d e ( d B ) Magnitude Response (dB) Spectrual Line 圖 3.6(b) 產生光譜線(α =1)
3.3 SHDSL 時脈復原所提之架構
底下為針對 SHDSL 初始化時脈復原所提之架構圖,包含前置濾波器、時脈誤差 偵測器、鎖相迴路、G994.1 資料解譯和數位化重新取樣器,其各個區塊的功能將於各 小節提出說明。 Z-1 L↓ Z-1 Z-1 Conj Im{•} Loop Filter Gain 圖 3.7 SHDSL 時脈復原方塊圖3.3.1 前置濾波器(Prefilter)
左圖可以等效成右圖,其傳輸方程式: 1 1 1 1 1 1 − − + − − + + + = − − L L z z z z K (11) 以此來當作一簡易的低通濾波器,除了用來濾掉部分雜訊外還能將取樣訊號頻率降低 L 倍。以 L=8 為例,此低通濾波器的頻率響應圖為下 0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 -80 -70 -60 -50 -40 -30 -20 -10 0 10 20
Normalized Frequency (×π rad/sample)
M a g n itu d e ( d B ) Magnitude Response (dB) 圖 3.8(a-1) 前置濾波器頻率響應(L=8)
3.3.2 時脈誤差偵測器(Timing Error Detector)
圖 3.8(b) 時脈誤差偵測器 ) (⋅ f Bandpass Filter Sinusoidal Rom Table Moving Average Norm z-1 Conj ) Im(⋅ ) (n r w(n) q(n) m(n) e(n)
上頁圖為接收端估算時脈誤差之架構圖,r(n)為調變信號s(t)經由固定的取樣時間 誤差 ' T 取出。 n f(⋅)平方器: ) (⋅ f 為平方器運算子,不考慮通道響應及其他雜訊
( ) ( )
( )
= =∑
(
+)
i i s i s fnT nT w n r f cos2 2π ϕ (12) 而傳送端的時脈 T 與接收端時脈T 之間彼此相差 Ts ∆ ,即Ts =T+∆T 。假設有一 f ∆ 使得 fi⋅∆T = ∆f ⋅T ,上式便可改寫成∑
+∆ + = ∆ + = i i in T T f T T n w n r f( ( )) ( ( )) cos2(2π ( ) ϕ ) =∑
+∆ + i i i f nT f ) ) ( 2 ( cos2 π ϕ (13) n 帶通濾波器: 帶通濾波器的作用即相當於以 fi +∆f 為中心頻率來做濾波的動作,其目的在取出 此時脈資訊。n Sinusoidal Rom table:
Sinusoidal Rom table所存的是正確的取樣時間T 時w(n)所應得到的值,包括同調
值與正交值(coherent value and quadrant value)兩個部份。 Rom table
⋅
sin(
4
)
)
4
cos(
fnT
j
fnT
π
π
(14) 由於SHDSL為single tone傳輸模式, f 為一個固定頻率值 f 。所以改寫成 iw
(
nT
s)
=
w
(
n
)
=
1
/
2
⋅
[
1
+
cos(
4
π
fnT
s+
ϕ
)]
(15))
(
)
(
n
=
K
⋅
e
j(4πfn(Ts+T)+ϕ)+
e
j(4πfn(Ts−T)+ϕ)q
(16) n 平均動差 (Moving average) 濾波器: 從上式q(n)可以看出,此時信號會有一接近低頻的訊號與近似二倍頻的訊號產 生,為了改善此一部分除了我們將原本帶通濾波器移至Rom Table再作,此時為 窄頻帶通濾波器,另外再加上設計一濾波器來消除抑制二倍頻的部份,當q(n)經 過Moving average濾波器,才不會造成高頻部份產生震盪的現象。此濾波器之設 計為一單一極點方式實現,其參數設定將於第五章提出。然後再經過正規化 (normalize)使得 ( ) 1 ) (n e mn m = ⋅ ∠ 單位長度為一單位,m
(
n
)
=
e
j(4πfn(Ts−T)+ϕ) (17) 這 裡 我 們 將 假 設 當 取 樣 頻 率 誤 差 很 小 時 ∠m(n) 為 極 小 值 , 此 時 取 ) ( ) ( )] 1 ( ) ( Im[m n m* n− ≈∠m n =e n ,e
(
n
)
≈
4
π
f
⋅
∆
T
,∆
T
=
T
s−
T
(18) 以此來調整取樣時間誤差。3.3.3 鎖相迴路(Phase Lock Loop)
此區塊的作用在減緩時脈誤差值的收斂速度及到達穩態時其收斂區間的大 小,迴路濾波器的參數設計將於第五章介紹,不同迴路濾波器參數設定將影響整個收斂 的趨勢。增益(Gain)主要是調整還原整個時脈誤差偵測迴路所造成的總增益。
3.3.4 數位化重新取樣器之設計
3.3.4.1 重新取樣器之控制迴路(Timing Loop) Interpolator Interpolation Filter hi Decimator Timing Processor( )
t x s T(
mTs)
x[
(
k k)
s]
T u m y + k u mkTs( )
kTi y 圖 3.8(c):數位化重新取樣器 假設經過 channel 後輸出信號為x(t),T 為接收端固定時脈,s x(mTs)是在固定的 取樣頻率1/Ts對x(t)取樣,y(kTi)是將x(mTs)經過數位化重新取樣器轉變成為新的取 樣信號,將原本取樣頻率1/Ts轉變成1/Ti以期達到時脈恢復作用。 假設 T 是傳送端真實的時脈,即接收端所要與之同步化的時脈,通常T 不完全是Ts 值的整數倍,T /Ts為不可整除之無理數。同理T 是根據取樣信號經時脈誤差偵測裝置i 演算而來,其目的在與時脈 T 同步化,{kT 必須要對映至接收端i} {mT ,所以s} T 與s T 之i 間的關係式 y(kTi)=Interp[x(mTs)]= y[(mk +uk)Ts] (19)
i s
k kT T m =int / …整數部份 k s i k kT T m u = / − …小數部份3.3.4.2 交織插補方式(Interpolation Method)
假設 interpolation filter 脈衝響應為hi(t),則 interpolator 輸出
=
∑
− m s i s h t mT mT x t y() ( ) ( ) (20) 由於經過 interpolation filter 的y(t)並不需要等於x(t),只在取樣點x(mTs)附近的值達 到近似值,理論上越精確則使用 interpolation filer 的階數就要越高。 當重新取樣時,t=kTi,T 將與傳送端以時脈 T 的輸出信號同步化,如前述所提i s i T T / 為不能整除之無理數,所以新的取樣點輸出。∑
− = m s i i s i x mT h kT mT kT y( ) ( ) ( ) m m i= k −∑
+ − = m s s k s k i s h m T u T mT mT x( ) ( ) ⇒∑
= + − 2 1 ] ) [( ] ) [( I I i s k i s k i T h i u T m x (21)Interpolation filter 若是有限脈衝響應I 、1 I 為固定的整數值,將 Interpolation filter 以2
多項式的方式在數位離散時間表示在計算第 k 個取樣值時,
[
(
)
] [ ]
∑
= = = + N m m m i s k i i u T h u d iu h 0 ) ( (22)N 代表 Interpolation filter 的階數,dm(i)表示 Interpolation filter 裡的係數,以 Lagrange
interpolator 為例,各多項式之係數: u u u u h 3 1 2 1 6 1 ] [ 3 2 1 =− + − − (23-1) 1 2 1 2 1 ] [ 3 2 0 u = u −u − u+ h (23-2) u u u u h =− 3+ 2 + 1 2 1 2 1 ] [ (23-3) u u u h 6 1 6 1 ] [ 3 2 = − (23-4)
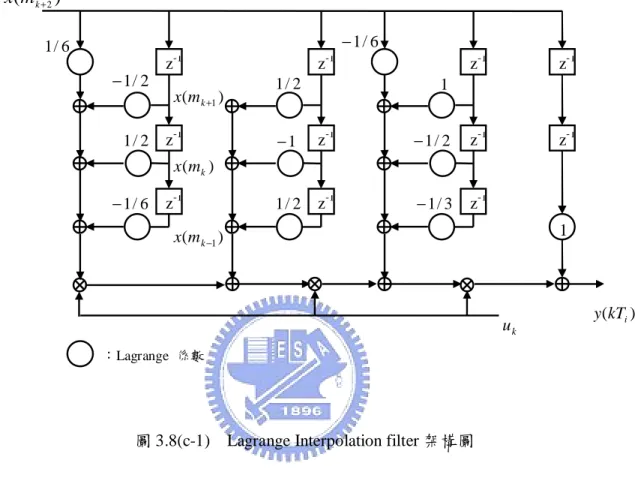
下圖為 3-階 Lagrange Interpolation filter 架構,用 Farrow Structure 的方式實現。
圖 3.8(c-1) Lagrange Interpolation filter 架構圖
接著說明在做重新取樣時,如何計算決定m 、k u 值, k s kT m s k T m 1) ( − (mk +1)Ts s k T m 2) ( − (mk +2)Ts i kT i T k 1) ( − i T k 1) ( + s kT u 時間軸 6 / 1 2 / 1 2 / 1 1 − 2 / 1 2 / 1 − 6 / 1 − 6 / 1 − 1 2 / 1 − 3 / 1 −
)
(
m
k+2x
z-1 z-1 z-1 z-1 z-1 z-1 z-1 z-1 z-1 z-1 z-1 1 ) (kTi y k u ) (mk+1 x ) (mk x ) (mk−1 x :Lagrange 係數理 論 上 當T 固 定 時 , 即 是 時 間 間 隔 相 同 , 我 們 所 要 重 新 選 取 的 取 樣 點i
[
...,(k−1)Ti,kTi,(k+1)Ti,...]
會與原來的取樣點[
...,(mk −1)Ts,mkTs,(mk +1)Ts,...]
交織插補 在一起。但實際上在作時脈恢復機制時,T 會隨時脈誤差值改變大小,如上圖所示,i kTi 取樣點並不一定落在[
mkTs,(mk +1)Ts]
區間,T 變小則可能在i[
(mk −1)Ts,mkTs]
,反之Ti 變大則可能落在(mk +1)Ts之後的區間。 當在作定點運算模擬時,取樣時間的表示值無法隨時間軸的遞增而完全表示,因此 判斷kT 是否有橫跨i mkTs,乃是藉由前一次時脈誤差的調整值T 加上現在的值i−1 T 與i Ts 作比較。 Ti−1+Ti ≥Ts,?mkTs :(mk −1)Ts (24) 判斷出kT 是在哪個區間後便可容易計算出i u 值。最後所得的演算結果: k ⋅ − = = ⋅ − = = s i k k s i k k T T u m T T u m 2 , 2 1 , 1 (25) 值得注意的是,上式並沒有包括kT 落在i[
(mk +1)Ts,(mk +2)Ts]
,因為當我們在計算第 k 個T 重新取樣點時,此時輸入信號並沒有第i (mk +1)Ts的值可供計算。因此T 通常至少i 大於或等於2⋅Ts,以避免此種無法計算情況產生。3.4 G994.1 調變之資料解譯(Datum Decoding)
要能解譯出調變的資料A ,通常必須要了解取樣相位差以期能解出正確的資訊,n 但在 timing recovery 的實作裡僅為了迴復取樣頻率誤差,取樣相位差資訊已經被移 除,而在實際狀況中 timing recovery 並不需要作回復相位差,而是由通道等化器自然 補償此相位差。因此我們從取樣值與 rom table 做比對估算出相關相位差以解譯出A ,n 而前提是當復原取樣時間至少已達一定準確度時便可開始解譯工作。1 0≤d≤N − 圖 3.9 G994.1 資料解碼功能圖 由於A 是以鮑率n 1/T經過 cosine 以頻率 f 調變傳送出去,為了簡化起見假設取樣所 得的信號:
r
(
n
)
=
A
n⋅
cos(
2
π
fnT
i+
ϕ
i)
(26))]
4
cos(
1
[
2
/
1
)]
2
[cos(
)
(
=
π
+
ϕ
2=
⋅
+
π
+
ϕ
⇒
w
n
fnT
i ifnT
i (27)由上式我們只要比對 rom table 中 cosine table 或 sine table 其中一組即可,在此以 cosine table 說明:
cos
ine
:
c
(
n
)
=
cos(
4
π
fnT
)
(28)0 5 10 15 20 25 30 -1 -0.8 -0.6 -0.4 -0.2 0 0.2 0.4 0.6 0.8 1 c(n) w(n) 圖 3.10(a) Cosine 表與平方器輸出比較圖 上圖 3.10(a)弦波的週期為 26,很清楚可見此信號彼此相位大約相差 17 個或者 9 個取樣點誤差,因為我們只需解出是相對極大值(‘1’)或者相對極小值(‘0’)便可,因此 只要解譯此取樣誤差點附近所在的值,判斷A 為’1’或’0’。 n 如何找出取樣點誤差為多少?我們可藉由一週期內迴旋積分的方式來比較
c
(n
)
與)
(n
w
之間的相關性看出。[
]
∑
( )
[
(
)
]
=⋅
−
+
=
=
N lN
n
l
c
l
w
n
w
n
c
f
u
11
,
mod
)
(
),
(
,n
∈
N
(29)0 5 10 15 20 25 30 -8 -6 -4 -2 0 2 4 6 8 圖 3.10(b)
[
]
∑
= + − ⋅ = 26 1 ] 1 ) 26 , [mod( ) ( ) ( ), ( l n l c l w n w n c f 藉由相對極大值或相對極小值出現在第幾個取樣點來判斷(decision)實際取樣點的 誤差,舉例來說我們以相對極小值出現在第 5 個取樣點來說,表示c(n)必須位移 4 個 取樣點w(n)才是’1’或是’0’。因為我們已事先知道 rom table 中c(n)第 14 個值為-1,所 以要取樣的點即第 18 個點為極值,但w(n)是經過平方器所產生的信號,r(n)才是接 收端真正要解譯的資料,所以要將整個週期放大成兩倍來計算。0 10 20 30 40 50 60 -1 -0.8 -0.6 -0.4 -0.2 0 0.2 0.4 0.6 0.8 1 c(n) w(n) r(n) 圖 3.10(c) Cosine 表、平方器輸出與取樣輸出三者曲線圖 最後 18+25=43 即是我們所該取樣的相位誤差點。 實際在模擬時並不需要每取樣一次便計算所有的值,那將會增加運算量,只須每 一次取樣時將 rom table 做 cyclic sift 一位做運算,或是每間隔一段取樣時間總結平均, 視使用者的需求而定。
第四章 定點運算之實現
4.1 各輸出端定點表示式
各個輸出端之定點表示式我們以 QT(X,Y)數字表示,X 代表位元總數部份以 X 位 bits 表示,Y 代表小數部份以 Y 位 bits 表示。在本此模擬實驗中訊號經過 channel 傳輸
後再經過接收端取樣,其取樣值的大小介於−1< y[n]<1,初始用 QT(14,13)表示式, 即以 1-bit 表示正負數及 13-bits 量化小數部份代表接收端的取樣值。下圖 4.1 為最後經 過各個增益的調整以及減少使用位元輸出的定點表示式。 ] [n d ] [n sq ] [n I ] [n Q ] [ ], [n y n yi q ] [ ], [n m n mi q ] [n me ] [n y ] [n e ] [n x ) 13 , 14 ( QT ) 13 , 14 ( QT QT(14,13) ) 13 , 14 ( QT ) 12 , 13 ( QT ) 14 , 15 ( QT ) 14 , 15 ( QT ) 12 , 13 ( QT ) 13 , 14 ( QT ) 12 , 13 ( QT ) 12 , 13 ( QT 圖 4.1 各點輸出之定點表示圖
4.1.1 插補端之實現(Interpolation Output Implementation)
y[n]是由x[n]經過數位化方式重新取樣得來,本次模擬方式x[n]量化成 14-bits 來表
] [n d ) 13 , 14 ( QT QT(14,13) ] [n y 圖 4.2 簡易低通濾波器(L=8) 上圖等效 z-transform 傳輸方程式的結果 7 6 5 4 3 2 1 1 8 1 1 1 − − − − − − − − − + + + + + + + = − − z z z z z z z z z 由上式可以看出隨時間的遞增,無論輸出的 bits 用多少來實現,最後的結果都會溢位 (overflow),但實際由於輸入的信號為 DPSK 調變為弦波輸入,我們將會有一收斂區 間。所以y[n]以 QT(14,13)
Pr
efilter
→
d[n]以 QT(14,13)。 例如一簡單的週期性為’1’方波訊號即在離散時域其為 1、-1、1、-1•••,若是 取樣頻率是其 2 倍,則可以知道會有絕對最大值為 2 產生,若是 4 倍取樣頻率則絕對 最大值為 4,以此類推。所以在半週期內取樣的速率愈高,相對付出的量化區間就愈 大,則要更多的 bits 來實現。 接下來我們藉由調整各濾波器的增益,探討各級輸出端之定點實現方式,以期時 脈能維持較少位元實現達到 G994.1 所要求的精確度於±50ppm。4.1.2 平方器之實現(Squarer Output Implementation)
因為輸入信號d[n]為小於 1 的小數,經過平方器後為了維持原 14-bits 的量化,所 以數值變小,d[n]:QT(14,13)
Squarer →
QT(28,26) → sq[n]:QT(14,13) ] [n d ] [n sq 圖 4.3 平方器輸出端舉例來說,假設十進制 150010等於二進制 000101110111002換算成十進制數字等 於 4 6 7 8 10 11 12 10 75 0915527343 . 0 2 2 2 2 2 2 2− + − + − + − + − + − + − = , 經 過 平 方 器 原 本 (0.09155273437510)2 = 0.0083819031753910變成 225000010=10001001010101000100002,因為了保持 14-bits 位準以及小數點的位置往左 位移 14 個,所以結果變成 13710=000000100010012,此數實際換算成十進制小數數字 等於2−7 +2−11+2−14 =0.0083618164062510,最後結果變如下圖所示。由於最大值不超 過 20010,雖然在作演算時以 14-bits 表示之以方便說明,但其理論上只需用到 8-bits 以上輸出在作運算,一般 Truncate 是低階位元,但此時 Truncate 並不是低階位元而是 除去高階的位元組。 由上述所舉的例子,值域在±2000的數值經過平方器後其最大值不超過 200,由 於量化區間減少將會造成後來時脈迴路難有精確的解析度可供偵測,所以藉由前一級 輸出的放大,增加可偵測時脈迴路之誤差值。 以同樣的量化區間來表示sq[n]信號,輸入值變大 2 倍經過平方器後輸出值自然就 變大成為 4 倍數。 接下來將以sq[n]為我們的輸入信號提供給下一級作時脈迴路測試,為了能看出調 整時脈迴路增益所影響的趨勢,首先要做的模擬是保持各個信號的完整性,用最多的 位元表示各輸出信號模擬整個時脈迴路。接著以此為對照組接續調整各端的增益,亦 即降低量化區間以期能用較少的位元來實現,探討最後收歛所得出時脈誤差值e[n]的 範圍。
4.1.3 弦波乘法端之實現(Sinusoidal Multiplier Output Implementation)
] [n sq :QT(14,13)
Rom
Table
→
QT(29,27) → I[n]、Q[n]:QT(13,12) ] [n sq ] [n I ] [n Q 圖 4.4 弦波輸出端 由於區間值落在 2000± ,理論上只需要用 12-bits = 212 = 4096 即可,一般為避免 雜訊干擾而造成錯誤決定,一般都會用多一點 bits 來實現。 接著相對於以上的信號做改變去做時脈迴路測試得出新的I[n]、Q[n]、yi[n]、 ] [n yq …等的信號,其相對的比較如以下圖 4.9a 至圖 4.9e 所示:圖組 a 為一組時脈迴 路測試,在沒有 truncate 任何 bit 即保持最完整信號時,其各輸出端之定點實現。圖組 b 為一組以 a 為依據作改善,降低濾波器的增益即減低輸出的解析度,換得較少位元 的輸出,圖組 c 以 b 為依據作改善等等以此類推,最後圖組 e 為最佳模擬結果。4.1.4 帶通濾波器端之實現
從 3.3 節可以了解我們需要一帶通濾波器取出時脈資訊,底下為一個二階 IIR 帶 通濾波參數式,其中心頻率與頻譜上產生光譜線有關,其係數設定將於第五章提出,( )
2 3 1 2 -2 3 1 2 1 1 1 z b b b − − − + + + + ⋅ = z a z a z K z HBPF ,K1∈常數 (30) 各系數用 16-bits 來表示,由於一開始預設時脈的取樣誤差±400ppm較大,所以在剛 開始做時脈迴路時會有大誤差值產生便是下圖 4.5 所示。] [n I ] [n Q ] [ ], [n y n yi q ] [ ], [n y n yi q ] [ ], [n Q n I ) 13 , 14 ( QT ) 28 , 30 ( QT QT(30,28) QT(30,28) ) 15 , 16 ( QT ) 30 , 32 ( QT QT(32,30) ) 15 , 16 ( QT QT(16,15) 圖 4.5 帶通濾波器架構圖 隨著輸出增益K 的不同去做時脈迴路測試將影響此端輸出的大小,當1 K 越大自1 然而然輸出值就越大,我們就必須要用更多的位元來表示更大的輸出範圍,反之亦然。 根據 G994.1 時脈迴路的運作其誤差要求範圍為±50ppm,我們將會在此限制範圍下盡 量減少整個迴路所需要的位元,降低硬體使用成本。 ] [n I 、Q[n]:QT(13,12)