國
立
交
通
大
學
機械工程學系
碩
士
論
文
室外騎乘自行車阻力與功率輸出及
肌肉活動情形之相互關係
Resistance, power output, and muscle activity in
outdoor cycling
研 究 生:周松緯
指導教授:楊秉祥 博士
i
室外騎乘自行車阻力與功率輸出及肌肉活動情形之相互關係
Resistance, power output, and muscle activity in outdoor cycling
研 究 生:周松緯 Student:Sung-Wei Chou 指導教授:楊秉祥 博士 Advisor:Bing-Shiang Yang, Ph.D. 國 立 交 通 大 學 機 械 工 程 學 系 碩 士 論 文 A Thesis
Submitted to Department of Mechanical Engineering National Chiao Tung University
in partial Fulfillment of the Requirements for the Degree of
Master in
Department of Mechanical Engineering July 2010
Hsinchu, Taiwan, Republic of China
ii 中文摘要
室外騎乘自行車阻力與功率輸出及肌肉活動情形之相互關係
學生:周松緯 指導教授:楊秉祥 博士 國立交通大學機械工程學系碩士班 摘 要 近年來,隨著自行車風潮的興起,自行車科學逐漸受到重視。本 研究探討在固定踩踏頻率(60rpm)及騎乘姿勢(彎把姿勢)下,改變實驗 的環境條件,利用室外實驗的數據進行分析,開發空氣與滾動阻力的 估算公式。以及探討不同環境條件與踩踏時肌肉活動情形間之相互關 係。藉此增加可模擬上坡及真實阻抗的室內自行車訓練台之開發潛 力。為達上述目的,本研究將以自行車為基礎結合力規、編碼器、磁 簧開關、肌電訊號量測系統以及生理訊號整合系統等儀器構築一室外 的實驗平台,此平台可即時量測及紀錄騎乘時四條下肢肌肉之表面肌 電訊號(股外側肌、股直肌、脛骨前肌以及外側腓腸肌)、踩踏頻率、 騎乘速率、踏板力量以及與上述參數對應之曲柄角度。本研究募集 10 位無騎乘自行車障礙的成年人(非專業騎士),平均年齡約為 24 歲。 而在環境條件部份則包括平面柏油路、2 度、5 度以及平面的水泥地。 最後本研究之結果在於發展了一套簡潔估算騎乘時環境阻抗之方 法,有效將騎乘時室外的阻抗量化。而肌電訊號分析方面, 本研究 利用室外實驗發現及驗證了幾個以往室內研究的結果:1.股外側肌之 肌肉活化程度隨著坡度的上升而上升,也就是股外側肌為騎乘時動力 提供之主要肌肉。 2. 脛骨前肌與外側腓腸肌,縱使固定踩踏率及姿 勢等實驗條件,也會因受測者騎乘時的策略而產生不同的活化情形。 3. 當踩踏率固定時, 踩踏的扭矩增加與股直肌之間無顯著差異。iii 英文摘要
Resistance, power output, and muscle activity in outdoor
cycling
Student:Sung-Wei Chou Advisor:Bing-Shiang Yang, Ph.D. Department of Mechanical Engineering
National Chiao Tung University ABSTRACT
To advance our knowledge on real-road cycling, the objective of this study is to quantify drag and rolling resistance, and analyze muscle
activity under different environmental conditions in outdoor cycling. The approach was to first establish an outdoor experimental platform
(instrumented bike) to quantify biomechanical variables on real roads, and then examine the effect of slope and pavement on lower-extremity muscle activities during uphill cycling. The instrumented bike is a full-size bicycle equipped with an encoder, a load cell, a magnetic reed switch and multi-channel surface electromyography (EMG) sensors. The equipment can simultaneously measure and record EMG, pedaling
cadence, cycling velocity, pedal force and crank angle in real-road environment.
Ten healthy (untrained) subjects were recruited for this study. Each subject performed outdoor cycling, with constant pedaling cadence (60 rpm), under four randomly-ordered conditions: level asphalt ground, 4%-slope uphill asphalt road, 8%-slope uphill asphalt road, and level cement ground. Surface EMG signals were recorded from rectus femoris (RF), vastus lateralis (VL), gastrocnemius lateralis (GL) and tibialis anterior (TA) muscles to quantify the timing, duration, amplitude, and pattern of muscle activities during cycling in different conditions.
After all, this study developed a simplified method for assessment of resistance forces in cycling and quantify environment resistance during cycling by regression analysis. According to the results of our outdoor study, we found: the muscle activation of VL increased with the slope and crank torque; high inter individual differences concerning the EMG patterns for GL, TA muscles; No statistical difference was found in the muscle activation of RF under different conditions.
iv
目錄
中文摘要 ... ii 目錄 ... iv 表目錄 ... vii 圖目錄 ...viii 一、前言 ... 1 1.1 自行車科學(cycling sciences)概述 ... 1 1.2 研究背景及動機 ... 4 1.3 文獻回顧 ... 6 1.3.1 空氣阻力(Air resistance) ... 6 1.3.2 滾動阻力(Rolling resistance) ... 8 1.3.3 阻抗估算之數學模型 ... 8 1.3.4 上坡 ... 9 1.3.5 功率輸出 ... 9 1.3.6 肌肉活動的情形 ... 11 1.4 研究目的 ... 13 二、研究方法 ... 15 2.1 研究對象 ... 15 2.2 研究工具 ... 15v 2.2.1 自行車 ... 17 2.2.2 角度編碼器 ... 17 2.2.3 測力規 ... 19 2.2.4 時速計 ... 21 2.2.5 表面肌電訊號量測系統 ... 21 2.2.6 資料整合及擷取系統 ... 23 2.2.7 風速計 ... 24 2.2.8 攜帶型電腦 ... 25 2.3 室外實驗 ... 26 2.3.1 實驗設計 ... 26 2.3.2 實驗步驟 ... 27 2.3.3 實驗終止條件 ... 29 2.4 資料分析 ... 29 2.4.1 阻抗迴歸 ... 30 2.4.2 表面肌電訊號 ... 36 三、結果與討論 ... 41 3.1 阻抗迴歸相關 ... 41 3.1.1 實驗結果 ... 41 3.1.2 討論 ... 44
vi 3.2 坡度與路面對肌肉活動情形的影響 ... 46 3.2.1 坡度對肌肉活動情形之實驗結果 ... 46 3.2.2 路面對肌肉活動情形之實驗結果 ... 54 3.2.3 討論 ... 58 3.3 研究限制 ... 65 四、結論 ... 67 五、未來研究方向與建議 ... 68 六、參考文獻 ... 70
vii
表目錄
表 1 受測者基本資訊 ... 41 表 2 阻抗迴歸之參數 ... 42 表 3 阻抗迴歸之變異數分析 ... 42 表 4 阻抗迴歸係數 ... 43 表 5 下肢肌肉與曲柄扭矩在不同坡度下之變異數分析 ... 49viii
圖目錄
圖 1 Graeme Obree’s crouch/tuck position ... 2
圖 2 自行車科學探討內容示意圖 ... 3 圖 3 不同騎乘姿勢之示意圖 ... 7 圖 4 室外量測平台示意圖 ... 16 圖 5 室外量測平台 ... 16 圖 6 實驗用自行車 ... 17 圖 7 角度編碼器 ... 18 圖 8 編碼器夾具與同動機構 ... 19 圖 9 測力規 ... 20 圖 10 測力規夾具 ... 20 圖 11 磁簧開關 ... 21 圖 12 表面肌電訊號量測裝置 ... 23 圖 13 資料擷取及整合系統 ... 24 圖 14 風速計與風速探棒 ... 25 圖 15 攜帶型電腦 ... 26 圖 16 實驗步驟流程圖 ... 28 圖 17 騎乘阻抗涵蓋部份示意圖 ... 31 圖 18 動能及位能相關參數取得方法 ... 32
ix 圖 19 阻力所產生負功之參數圖 ... 33 圖 20 原始數據紀錄及處理。圖由上之下依序為股外側肌、股直肌、 脛骨前肌以及外側腓腸肌的肌電訊號圖,接著為曲柄角度、踏 板力量以及轉速。在肌電訊號圖方面,縱軸為正規化後之結果 (柏油平路最大值為 1),橫軸為時間序列單位為毫秒,灰線為 原始資料加上絕對值及正規化之圖形,黑線為再進行移動平均 的處理後之圖形。曲柄角度之縱軸為角度單位為度,灰線為解 碼後之資料,黑線為將不完整之訊號及不正常之跳動濾除後之 結果。而在踏板力量圖形之縱軸為對受測者體重正規化後之結 果。最後在轉速方面如先前所提及之本研究利用磁簧開關紀錄 後輪之轉動速率,藉以推估騎乘時之速度。 ... 39 圖 21 實驗數據散佈圖(縱軸為 0.5 倍的空氣密度乘以相對速度平 方,橫軸為曲柄做功減去位能改變量) ... 42 圖 22 十位受測者在不同實驗條件下,踏板力量之平均值 ... 46 圖 23 十位受測者在不同實驗條件下,股外側肌肌電訊號之平均值 ... 47 圖 24 十位受測者在不同實驗條件下,股直肌肌電訊號之平均值 .. 47 圖 25 十位受測者在不同實驗條件下,脛骨前肌肌電訊號之平均值 ... 48 圖 26 十位受測者在不同實驗條件下,外側腓腸肌肌電訊號之平均值
x ... 48 圖 27 十位受測者在不同坡度下扭矩峰值之平均值與標準差(縱軸單 位為扭矩對體重進行正規化。**:p<0.01,paired t-tests) .... 50 圖 28 十位受測者在不同坡度下肌電訊號峰值之平均值與標準差(縱 軸為對柏油平路峰值進行正規化之肌電訊號。*:p<0.05,**: p<0.001,paired t-tests) ... 51 圖 29 十位受測者在不同坡度下扭矩平均值之平均值與標準差(縱軸 單位為扭矩對體重進行正規化。**:p<0.01,paired t-tests) 52 圖 30 十位受測者在不同坡度下肌電訊號平均值之平均值與標準差 (縱軸為對柏油平路峰值進行正規化之肌電訊號。*:p<0.05, **:p<0.01,paired t-tests) ... 53 圖 31 十位受測者在不同路面下扭矩峰值之平均值與標準差(縱軸單 位為扭矩對體重進行正規化。) ... 55 圖 32 十位受測者在不同路面下肌電訊號峰值之平均值與標準差(縱 軸為對柏油平路峰值進行正規化之肌電訊號。*:p<0.05,paired t-test) ... 56 圖 33 十位受測者在不同路面下扭矩平均值之平均值與標準差(縱軸 單位為扭矩對體重進行正規化。) ... 57 圖 34 十位受測者在不同路面下肌電訊號峰值之平均值與標準差(縱 軸為對柏油平路平均值進行正規化之肌電訊號。*:p<0.05,
xi paired t-test) ... 58 圖 35 在踩踏時脛骨前肌的兩種不同活化模式,12 位受測者中有 8 位歸於圖 A 群組,另外四位則歸於圖 B。其中實線表示平均 值,虛線為平均值加上一倍標準差(圖片來自於 Dorel et al. (2007))。 ... 61 圖 36 受測者 S02 單一踩踏循環之脛骨前肌活化模式(雙峰)... 62 圖 37 受測者 S07 單一踩踏循環之脛骨前肌活化模式(單峰)... 62 圖 38 受測者 S00 單一踩踏循環之外側腓腸肌活化模式(雙峰) ... 63 圖 39 受測者 S07 單一踩踏循環之外側腓腸肌活化模式(單峰) ... 63
1
一、前言
本章將詴著由以下小節,解釋本論文的研究宗旨。首先在「自行 車科學概述」中簡述自行車科學之重要性及其涵蓋的學門。接著於「研 究背景及動機」說明為因應台灣多雨的氣候以及特殊地形等因素,故 本研究欲利用自行車科學開發一可模擬實路上坡及真實阻抗之自行 車訓練台。然而模擬阻抗前必頇先認識各種騎乘狀況下產生之阻抗及 其中的因果關係,因此「文獻回顧」將匯整「模擬室外阻抗」為宗旨 的相關文獻,並從中概述模擬室外真實阻抗之方法。最後由「研究目 的」總結並列出本研究嘗詴要完成的目標。 1.1 自行車科學(cycling sciences)概述國際自行車總會的一小時紀錄競賽(Union Cycliste Internationale, UCI Hour Record)是個同時具備公信力及悠久歷史的世界級自行車競 賽,自 1876 年起紀錄不斷刷新,迄今紀錄已往前推進了一倍之多, 而這明顯的進步,正是自行車科學(The science of cycling)發展的成 果。在一小時紀錄賽中,研究學者們最令人驚訝的表現,莫過於 1993 年蘇格蘭籍工程師 Graeme Obree,他自科學及工程的角度出發,開發 出獨特的低風阻姿勢(The "crouch" , or "tuck" position) ,如圖 1,並以
2
業餘選手的身份參賽,一舉創下驚人的世界紀錄,成為傳奇的選手。
圖 1 Graeme Obree’s crouch/tuck position
近年來著名的自行車選手 Lance Armstrong 也利用功率(Power meter)及新陳代謝參數(Metabolic parameters)等科學數據作為訓練的 依據,在環法賽(Le Tour de France) 中無往不利蟬聯七次冠軍
(1999-2005)。百年來諸如此類的例子層出不窮,科學家們不斷地研究 及發展出許多提昇選手成績的方法,如利用空氣動力學
(Aerodynamics)的原理調整選手姿勢(Kyle 1986; Kyle 1989; Capelli, Rosa et al. 1993)、發展功率預估系統幫助選手擬定策略 (Marion and
3
Leger 1988; Gregor, Broker et al. 1991; Capelli, Rosa et al. 1993; Olds, Norton et al. 1993; Olds, Norton et al. 1995; Olds, Norton et al. 1995; Bassett JR, Kyle et al. 1999; Broker, Kyle et al. 1999; Moseley and Jeukendrup 2001; Schumacher 2002) 、以新陳代謝參數(Metabolic parameter)界定踩踏時的標準(Baseline)(Fernandez-garcia,
Perez-landaluce et al. 2000; Padilla, Mujika et al. 2000; Padilla, Mujika et al. 2001)以及利用肌肉骨骼系統的模擬來降低騎乘自行車時運動傷害 發生的機率 (Solomonow, Baratta et al. 1988; Gregor, Broker et al. 1991; Hirokawa 1991),由此顯見自行車科學之研究確有其重要性與發展潛 力。
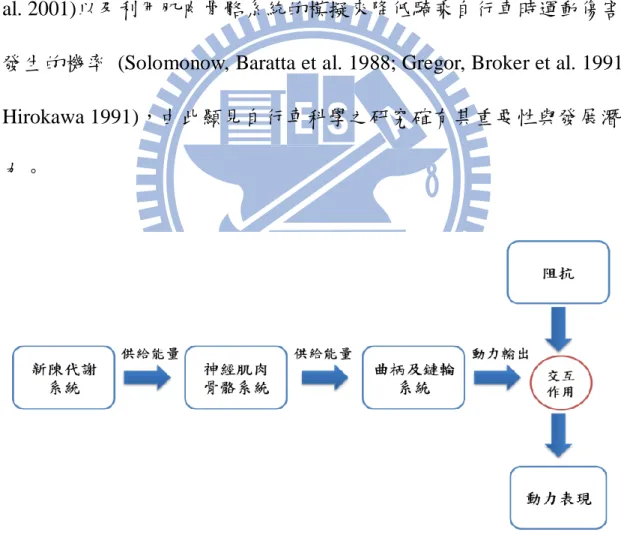
4 自行車科學所探討的內容如圖 2 所示,整個運作方式自人體內 部而起,從新陳代謝系統(Metabolism system)提供能量驅動神經肌肉 骨骼系統( Neuromuscular-skeletal system),接著再將能量以踩踏的方 式施加於曲柄(Crank),藉由鏈輪(Chainring)以扭力(Torque)及踩踏率 (Cadence)之形式產生踩踏功率(Power),克服阻力(Resistance)後所呈 現的就是自行車實際的動力表現。由以上的描述可察覺到自行車科學 所涵蓋的領域實是相當廣泛,從工程力學(Engineering mechanics)、空 氣 動 力 學 (Aerodynamics) 、 生 理 學 (Physiologic) 、 生 物 物 理 學 (Biophysics) 、 生 物 力 學 (Biomechanics) 一 直 到 人 體 測 量 學 (Anthropometry)等學門內都有相關的參數,且絕大多數有著相關性或 因果關係。也由於跨領域學門的結合使然,自行車科學有著相當多元 的發展。 1.2 研究背景及動機 自 1855 年法國的工程師 Michaux 和 Lallement 設計與現今相似的 自行車以來,無數的自行車每天使用於通勤、娛樂和競賽上。而近年 來 自 行 車 的 風 潮 隨 著 樂 活 (Lifestyles of Health and Sustainability, LOHAS)觀念的推廣風靡全台,政府也極力推廣自行車這項既環保又 健康的運動,進而大興土木建設自行車專用道及河濱運動公園等相關 設施(行政院體育委員會 2002)。但有鑑於台灣四面環海為潮濕多雨
5 的海島型氣候,這對愛好自行車運動的台灣民眾無疑地是一大挫折; 因為面對多雨的氣候即便擁有完善的室外設施,下雨時亦只能向隅。 此時室內自行車訓練台變成為享受騎乘自行車樂趣的唯一選擇。除此 之外,由於台灣地形山多平地少,故在山林中穿梭以征服山岳為樂的 自行車騎士不在少數,如「塔塔加攻頂」這般著名的單車登山路線, 更是讓騎士們躍躍欲詴。但並非人人住所旁都有著類似的登山路線, 往往需要長途跋涉才能到達,且在不熟悉路況的情況下貿然挑戰,實 是非常危險的行為。更有甚者,雖然騎士們頇先訓練至擁有足夠的能 力方可進行攻頂,然訓練程度卻往往是自由心證,而無明確指標能夠 提供騎士們足夠客觀資訊。 綜合以上需求得到一結論:若室內自行車訓練台可真實地模擬上 坡及其他室外之阻抗,騎士們在家便可以模擬任何引人入勝的單車朝 聖路線以進行訓練,非但不受距離及氣候影響,同時亦減少訓練過程 中安全上的顧慮。目前市面上常見的室內訓練台雖稱阻力多段可調, 但無法模擬真實的路感,其主要原因在於訓練台所提供的阻力並非由 真實的阻抗所推估出來,故使用者必頇經由回想或臆測真實的路感, 利用增加或減少的類比方法來調整阻力(例如油阻或磁阻)的大小。故 若能利用生物力學量測分析建立室外騎乘自行車阻抗與相關參數之 間的關係,便可利用其結果於室內訓練台重現真實室外阻抗。進而開
6 發可模擬上坡及真實環境阻抗的室內訓練台。 1.3 文獻回顧 承上可知,本研究初步構想為利用生物力學方法探討、模擬上坡 及真實阻抗之可行性。故本節將分段整理相關參數,並從認識自行車 騎乘阻抗開始依序探討。 1.3.1 空氣阻力(Air resistance) 根據空氣動力學,在假設實驗環境為穩態流場,且為不可壓縮流情況 下(定速騎乘),空氣阻力與速度平方成正比,Kyle在1991年指出騎乘 自行車時速超過30 km/hour時,空氣阻力佔全部騎乘阻力的90%以上 (Kyle 1991),且在時速高於50km/hour時空氣阻力為影響騎乘效能最 主要的因素(Gross, Kyle et al. 1983; Kyle 1991)。故稱高速騎乘時空氣 阻力為騎乘自行車最主要的阻力來源並不為過(Faria, Parker et al. 2005)。然而空氣阻力不僅與速度有關同時也與接觸面的幾何參數成 正比,包括接觸面積與形狀,也就是騎乘姿勢及選手的身材(Swain, Coast et al. 1987; Capelli, Rosa et al. 1993)。Gnehm等人在1997年便指 出,騎乘姿勢的改變對於騎士的攝氧量(Oxygen consumption, V. O2)、 心跳率(Heart rate, HR)及呼吸交換率(Respiratory exchange ratio, RER) 都有顯著的影響(Gnehm, Reichenbach et al. 1997),不僅如此更有文獻
7
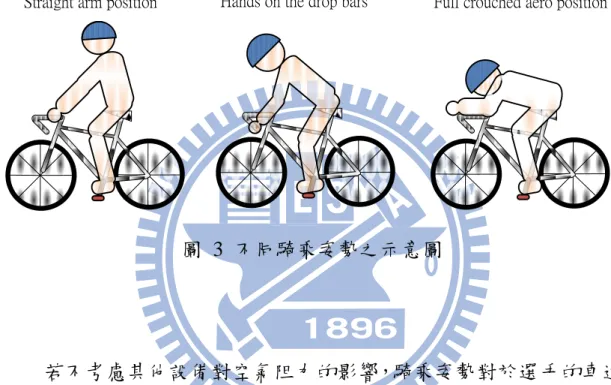
發現,與一般直立姿勢(Straight arm position)相較,使用彎把姿勢 (Hands on the drop bars)下空氣阻力減少了20%,且若使用更為蜷縮的 俯握姿勢(Full crouched aero position)將能比彎把姿勢再減少10-17% (Kyle 1986; Kyle 1989; Capelli, Rosa et al. 1993)。
Straight arm position Hands on the drop bars Full crouched aero position
圖 3 不同騎乘姿勢之示意圖
若不考慮其他設備對空氣阻力的影響,騎乘姿勢對於選手的車速 與生理消耗程度有著舉足輕重的影響(Faria and Cavanagh 1978; Faria 1992; Gnehm, Reichenbach et al. 1997),因此專業選手若要減少高速時 所產生的空氣阻力往往會從改變騎乘姿勢開始。然而除了姿勢及體型 外會影響空氣阻力的變數還有:車架(Frame)與輪圈(Wheel)的類型 (Jeukendrup and Martin 2001) 、 濕 度 (Humidity) 、 空 氣 密 度 (Air density)、溫度(Temperature)、風速(Wind)以及騎乘者的服裝(Cyclist’s apparel)等等。
8 1.3.2 滾動阻力(Rolling resistance)
文獻指出滾動阻力在低速時對功率輸出的影響大於空氣阻力 (Faria and Cavanagh 1978),故滾動阻力在自行車阻抗中也是一個相當 重要的參數(Di Prampero, Cortili et al. 1979; Kyle 1988)。滾動阻力產生 的原因為:因實際生活中無完美剛體之存在,故轉體在滾動中將發生 形變,於是轉體與接觸面之間產生作用力和與旋轉方向相反之力矩。 故滾動阻力將會與接觸面積、正向力及轉體與接觸面間的摩擦係數有 關。綜上所述,可知影響自行車滾動阻力的參數有:輪胎上的垂直覆 載、輪圈直徑、輪胎種類、胎壓以及路面摩擦係數。上述參數也大多 曾經被學者們討論過:Faria 指出滾動阻力與輪半徑成反比(Faria and Cavanagh 1978);滾動阻力與胎壓的關係也是成反比;路面摩擦係數 方面,混凝土與柏油路的滾動阻力相差 5%;而自行車輪胎的種類分 作內外胎分離結構與管狀胎結構(Clinchers vs Sew-ups),同時有文獻 指出 在同 馬力 (0.2 hp) 輸 出下 , 管 胎比 一般 的內 外 胎 時 速快 了 6km/hour (Roland and Rice 1973)。
1.3.3 阻抗估算之數學模型
若不考慮重力對上坡時所作的負功,也就是提昇位能所需要的能 量,以及提昇速度時所付出的能量,空氣阻力與滾動阻力這兩項便是 室外騎乘自行車阻抗的主要來源,故也有學者將以上兩項整合起來開
9
發出估測綜合阻抗值的公式(Kyle, Caoiozzo et al. 1979),此公式已經 被證明在普遍的自行車騎乘時可以提供準確的數值(Groot, Sargeant et al. 1995)。且 Candau 等人也發展了一套類似了方法。而這些方法的優 點是在室外實驗時,也可由計算得知阻力大小,且與進行風洞實驗相 較,此方法於增加實驗便利性的同時亦大幅降低實驗成本(Candau, Grappe et al. 1999)。詳細的阻抗估算系統將在下章「室外上坡及騎乘 阻抗之數學模型」小節中說明。 1.3.4 上坡 儘管上坡在自行車比賽中是非常重要的環節,卻很少有針對室外 上坡騎乘的自行車研究,缺乏研究的部分原因是由於難以在室外獲得 數據(Bertucci, Grappe et al. 2005)。但儘管如此還是有學者在室內利用 飛輪機(Ergometer) (Patterson, Pearson et al. 1983; Kautz, Feltner et al. 1991; Swain and Wilcox 1992; Caldwell, Li et al. 1998; Li and Caldwell 1998; Palmer, Borghouts et al. 1999)或跑步機(Treadmill) (Heil 1998; Hansen, Jorgensen et al. 2002; Hansen, Jorgensen et al. 2002)進行實 驗。而本研究在上坡方面的探討將著重於利用室外實驗估算上坡時的 能量需求。
10 1.3.5 功率輸出 充分瞭解各阻抗之後,重新由機械力學的觀點出發,踩踏時人體 所產生的能量被曲柄鏈輪系統轉換為轉速和扭力,而轉速與扭力提供 整個自行車系統動能、位能以及克服阻抗的能量。故要估計真實阻抗 的數據,還需要佐以能夠直接表現自行車騎乘時動力表現的參數,也 就是騎乘時的功率輸出。且有文獻指出,當阻抗改變時,確實會對騎 乘者的功率輸出造成影響(Broker, Kyle et al. 1999)。Lucia 等人在 2001 年的研究也強調自行車選手產生功率的能力在競賽中是相當重要的 (Lucia, Hoyos et al. 2001)。該研究收集環義賽(Giro d’Italia)、環法賽 (Tour de France)以及環西班牙(Vuelta a España) 等國際自行車賽事的 數據,發現 選手們平 均每小時 之總輸 出功率可以 達 400W(Lucia, Hoyos et al. 2001)。功率輸出不僅僅是一個應變項,還可以用來計算 自行車騎乘效率(Efficiency) (Hawley and Noakes 1992; Bentley, Wilson et al. 1998)。然而瞭解功率輸出的重要性後,回到機械力學的觀點, 功率的定義即為扭矩乘以轉速,在自行車科學中,扭矩是由踏板力量 (Pedal force) 所提供,而轉速即為踩踏率(Cadence),故若欲量測功率 輸出這參數,除昂貴的市售套件外,亦可利用量測踏板力量及踩踏 率,來計算功率的輸出。且其中踩踏率是被公認為一個在自行車研究 中相當重要的參數,儘管至今對最佳 的踩踏率 仍未有共識(Faria,
11 Parker et al. 2005)。
1.3.6 肌肉活動的情形
騎 乘 功 率 與 肌 肉 骨 骼 系 統 有 著 直 接 的 關 係 (Hug and Dorel 2009)。Houtz and Fischer 早在 1959 年便進行了踩踏期間(Pedaling)肌 肉表現的相關研究(Houtz and Fischer 1959),該研究利用表面肌電訊 號(Surface electromyography, surface EMG) 研究主要的下肢表面肌 肉,並進一步指出踩踏期間肌肉活化的方式是協調且有次序地運作。 而關於踩踏期間肌電訊號的研究也越來越多(Ericson 1986; Jorge and Hull 1986; Ryan and Gregor 1992; Hug, Bendahan et al. 2004; Hug, Faucher et al. 2004; Hug, Laplaud et al. 2006; Hug, Marqueste et al. 2006; Dorel, Couturier et al. 2008; Duc, Bertucci et al. 2008),上述實驗所量測 的肌肉 大多為 :臀大 肌(Gluteus maximus, Gmax)、 股直 肌(Rectus femoris, RF)、股外側肌(Vastus lateralis, VL)、股內側肌(Vatsus medialis, VM)、半膜肌(Semimembranosus, SM)、半腱肌(Semitendinosus ,ST)、 股二頭肌(Biceps femoris, BF), 外側腓腸肌(Gastrocnemius lateralis, GL), 內側腓腸肌(Gastrocnemius medialis, GM)、脛骨前肌 (Tibialis anterior, TA)以及比目魚肌(Soleus, SOL)。除了直接比較肌肉活化情形 外,Ericson 利用室內訓練台(Ergometer)進行單關節肌肉與雙關節肌 肉於踩踏過程中的差異實驗,進一步指出雙關節肌肉(RF, GL) 的活化
12
程度比單關節肌肉(VM, VL, SOL)來的低(Ericson 1986)。然而以上所 提及的肌 肉大 多為表 層肌肉 ,這是 因 為深層肌 肉 (如:脛 骨後肌 (Tibialis posterior, TP) 等)的量測必頇使用到侵入式(Intramuscular) 的 肌電訊號量測系統,侵入式系統使用的電極必頇插入人體內,才能量 測肌肉的訊號,但由於訊號接收的範圍小,所以量測到的數據並不能 代表整個肌肉束的活動;不過還是有一些學者針對其中幾條深層肌肉 進行研究(Juker, McGill et al. 1998; Chapman, Vicenzino et al. 2006; Chapman, Vicenzino et al. 2008)。此外也有學者使用核磁共振成像 (Magnetic Resonance Imaging , MRI)來進行肌肉活化程度的研究(Hug, Bendahan et al. 2004; Akima, Kinugasa et al. 2005; Hug, Laplaud et al. 2006; Hug, Marqueste et al. 2006; Endo, Kobayakawa et al. 2007),這些 研究以大腿肌肉的活化程度做為基準,間接的表示其他肌肉的活化程 度,故不能精確的量化數據(Hug and Dorel 2009)。有關肌肉的研究, 除了瞭解踩踏時改變特定參數(如:踩踏率等)後所對應的肌肉活化程 度 是 否 有 顯 著 差 異 外 , 還 可 進 一 步 探 討 騎 乘 時 肌 肉 共 同 收 縮 (Coactivation) 的 情 形 及 對 踩 踏 影 響 (Lombard 1903; Solomonow, Baratta et al. 1988; Hirokawa 1991; Hug and Dorel 2009),或是踩踏時肌 肉招募類型的百分比(Ahlquist, Bassett et al. 1992)以及踩踏時肌肉疲 勞的判定或解釋(Colliander, Dudley et al. 1988; Psek and Cafarelli 1993;
13
Hautier, Arsac et al. 2000)。根據以上論述,本研究認為採用表面肌電 訊號來進行肌肉活動情形之分析相當合宜,故本研究設想利用室外實 驗提升踩踏時肌電訊號數據之真實性,研究不同環境條件與肌肉活動 情形之間的關係。 1.4 研究目的 由文獻回顧可知自行車科學發展至今已奠定了相當豐厚的背 景,但仍有些許地不足:第一、大部分的研究仍傾向於提昇自行車選 手的成績,反倒是忽略了為最大宗單車使用者的一般群眾,也就是自 行車科學在應用面的研究相對較少。第二、既往的研究大多為利用飛 輪機(Ergometer) 或是跑步機 (Treadmill) 進行室內實驗,而少有針對 室外數據進行分析的研究,其原因不外乎為儀器的限制 (Bertucci, Grappe et al. 2005),但若室內、外的差異性對實驗結果有顯著影響, 此時研究成果的張力及可信度便略嫌不足。 本研究的主要實施方式為:改變室外實驗的環境條件,藉由數據 的分析,建立空氣與滾動阻力的估算公式,再搭配上坡時所需要的能 量,開發可模擬上坡及真實阻抗的室內自行車訓練台。以及探討不同 環境條件對踩踏時下肢肌肉活動情形的影響,分析踩踏過程中下肢各 肌肉所扮演的角色(提供踩踏能量或維持下肢踩踏運動),並同時利用
14 室外實驗之結果與室內模擬的文獻進行比較,探討是否有一致的趨 勢。藉此提供使用室內自行車訓練台之使用者進一步了解自身運動時 的資訊。 本研究主要目標為: Aim 1:整合建立室外自行車參數量測平台。 Aim 2:建構室外自行車騎乘阻抗估計之數學模型。 Aim 3:利用室外實驗之數據開發模擬上坡及真實阻抗之系統。 Aim 4︰分析不同環境條件對肌肉活動情形的影響。 此外在運動科學領域中,許多文獻在術語的解釋及應用上各有其 見解。甚至有文獻指出這些定義上的出入會導致研究結果受人質疑 (Spriet 1992; Bassett JR and Howley 1997; Noakes 1998; Brooks 2000; Wagner 2000; Moseley and Jeukendrup 2001; Robergs, Ghiasvand et al. 2004)。故本研究所使用的自行車科學專用術語,其定義皆參考自 Faria 在 2005 年發表的文獻(Faria, Parker et al. 2005; Faria, Parker et al. 2005)。
15
二、研究方法
2.1 研究對象
根據 Hopkins 等人於 1999 年所建議:考量到受詴者本身組內變 異量(within-subject variation),使用 10 個受測者且重複實驗 3 次才勉 強有 95%的信賴區間(Confidence interval)(Hopkins, Hawley et al. 1999),故本研究自國立交通大學中募集 10 位無騎乘自行車障礙的成 年人,並且所有受詴者皆未患有任何肌肉骨骼或神經方面的疾病,像 是類風濕性關節炎、下肢關節韌帶或是軟骨受傷,亦不具其他下肢疾 病病史,同時不具有平衡方面的問題。除此之外,若受詴者不願簽署 受詴者同意書或無法完成全部的實驗亦將被排除。受測者在實驗之前 已充分瞭解本實驗的目的與步驟,實驗全程在國立交通大學校區內完 成並全程使用檢驗合格之自行車安全帽。 2.2 研究工具 本研究探討室外騎乘時的功率輸出及肌肉活動情形,故必頇先建 立可在室外量測功率及肌電訊號的平台,大致架構如圖 4 所示。完 整的室外自行車參數量測平台如圖 5,完成之室外自行車參數量測平 台重約 21 公斤。
16 肌電訊號電極 攜帶型電腦 訊號擷取系統 磁簧開關 測力規 角度編碼器 自行車碼表 時速顯示器 圖 4 室外量測平台示意圖 圖 5 室外量測平台
17 2.2.1 自行車 本 實 驗 將 採 用 巨 大 機 械 工 業 股 份 有 限 公 司 所 生 產 的 R1000 (R1000,巨大機械工業股份有限公司,台中縣,中華民國)作為實驗 用自行車如圖 6,除加裝貨架外無改裝任何套件。 圖 6 實驗用自行車 2.2.2 角度編碼器 計算功率時需要轉速的資料,然而一般市面上所販售之自行車 用的轉速計,解析度大多為 2 P/R 甚至是 1 P/R,刻度太寬的後果是 其他數據無法與曲柄角度進行整合,故本研究採用一般工業用的角度
18 編碼器,如圖 7 (E6F-AB3C-C, OMRON 株式会社, 京都, 日本)。此 為絕對式角度編碼器,解析度達 360 P/R 且為 BCD 碼輸出。這項儀 器裝置於自行車下管,且利用皮帶摩擦輪組使其與鏈輪同軸旋轉,故 可得知每個時間點所對應的曲柄角度,而上述之機構如圖 8 所示。 圖 7 角度編碼器
19 圖 8 編碼器夾具與同動機構 2.2.3 測力規 除轉速外還需要扭矩才能計算功率,而鏈輪的扭矩始於騎乘者 施於踏板的力量,故本研究將單軸測力規 (LC321-500, omegadyne, inc., USA) 設置於踏板上,量測垂直於踏板的力量。而承受力量之平 面與固定於踏板之夾具如圖 10。
20 圖 9 測力規
21 2.2.4 時速計 時速計部份分成兩個裝置,一是提供給受測者參考,二是紀錄 速度數據。前者將採用一般市面常見的自行車時速表及液晶顯示器, 而後者將選用一般電子材料行即可購得之磁簧開關如圖 11,將其固 定於輪圈及前叉上,利用其原理便可得知輪圈每轉所需的時間,即可 由計算得知速度資訊。 圖 11 磁簧開關 2.2.5 表面肌電訊號量測系統
22
BIOPAC Systems, Inc., USA) 利用肌電訊號電極擷取訊號。此系統用 以量測人體動作時肌肉的活動情形,採用非侵入式的表面肌電訊號量 測系統。使用前頇先將欲量測之部位以肥皂或清潔劑清洗之後再使用 去角質專用洗潔劑與酒精清理皮膟表面,以減少體表雜訊。本研究將 使用此系統擷取受測者於踩踏時的下肢肌肉活動情形。
本研究將量測受詴者慣用側之單腳四條肌肉分別為:股外側肌 (Vastus lateralis, VL)、股直肌(Rectus femoris, RF)、外側腓腸肌
(Gastrocnemius lateralis, GL) 以及脛骨前肌(Tibialis anterior, TA) ,在 這四條量測肌肉上利用透氣膞帶將二極式電位量測器固定於其上,並 且在腓骨頭(Head of fibula) 上貼上一片電極貼片作為基準值,以去除 皮膟表面所造成之雜訊。擷取頻率為 1000Hz。
23
圖 12 表面肌電訊號量測裝置
2.2.6 資料整合及擷取系統
本研究利用訊號擷取介面 MP150 (MP150, BIOPAC Systems, Inc., USA) 整合上述儀器 (角度編碼器、測力規、磁簧開關以及表面肌電 訊號量測系統),並將資料擷取頻率設定為 1000Hz,儲存於攜帶型電
24 腦中。紀錄數據列的方法為設置一觸發開關,受測者在經過起點時按 下此觸發開關,系統將會自動紀錄開關啟動後六秒的數據。 圖 13 資料擷取及整合系統 2.2.7 風速計 本研究利用 CFY-361 (CHY-361,連虹股份有限公司,台南縣, 中華民國) 進行風速的量測,此風速計除風速計本體外還包含一風速 探棒。使用時將探棒受風面調整至與受測者騎乘方向平行,量測兩秒 內的平均風速值作為實驗數據,量測單位為 m/s。
25
圖 14 風速計與風速探棒
2.2.8 攜帶型電腦
本研究採用 ASUS W7J (W7J; CPU: T2400 @ 1.83GHz; RAM: 859MHz 1.00GB,ASUSTeK Computer Inc.,中華民國) 進行資料之 蒐集與分析。
26 圖 15 攜帶型電腦 2.3 室外實驗 2.3.1 實驗設計 本實驗的自變項為室外騎乘阻抗且實驗會在交通大學校區內完 成,故上坡的重力分量與滾動阻力將根據交通大學的地形及路面狀況 來決定,選用的條件有:柏油路面搭配平路及 4.53 度(約 8%)與 2.38 度 (約 4%)兩種坡度,以及水泥地面搭配平路,共四種不同條件。而空 氣阻力部份將於每次實驗的出發前、經過中間點以及到達終點的三個 時間點進行風速的量測,利用平均值作為風速參考。除外在環境外, 其他變數將會進行控制: I. 齒比:固定為 39X24。
27 II. 騎乘距離:30 公尺。 III. 踩踏率:固定踩踏率為60 rpm,固定方法為再實驗前按下碼表紀 錄到終點時的時間,由於齒比及踩踏率固定,故車速(3.47m/s)也 會固定。實驗騎乘距離為30公尺,推算此實驗騎乘時間約為8.64 秒,若受詴者騎乘時間未落在理論時間之可容許範圍內 (8.64±0.8 秒),此實驗之資料將被排除。 IV. 輪胎種類:R1000原廠胎 (內外胎式)。 V. 胎壓:700 kpa。 VI. 座墊高度:根據Hamley所提出最佳效率的座椅的高度相等於股骨 轉子中心到地面的長度(Hamley and Thomas 1967),其中座墊高度 的定義為:座椅的頂點和踏板中心的垂直距離,此時曲柄與座管 需呈一直線。 VII. 姿勢:顧及受測者安全將採用可使用煞車之彎把姿勢。 2.3.2 實驗步驟 實驗流程如圖 16 所示。進行實驗前先檢查自行車胎壓及齒比是 否為實驗設定值,煞車系統之作動是否良好。接著請受測者簽署實驗 同意書,簽署完畢後量測及紀錄受測者身高體重等基本資料,且進行 四條肌肉的最大自主收縮的肌電訊號量測。按照受測者股骨轉子中心 至腳底的高度調整座椅高度,同時亂數決定當日實驗條件之順序。到
28 達第一個實驗地點後,檢查實驗儀器是否為正常運作後,請受詴者熱 身五分鐘以熟悉實驗車輛,便可以開始實驗。每次實驗中必頇觀察受 詴者是否達到實驗終止之條件,且每進行完一實驗便要口頭詢問受測 者是否感到疲勞,若以上有一項符合便要終止實驗且排除這次實驗的 所有資料,若無終止實驗的跡象,即可檢查該實驗數據之完整性,並 請受詴者休息五分鐘後再進行第二次的實驗。以上過程重複詴驗三次 後,更換實驗地點,再重複進行實驗三次直至所有條件皆完成資料擷 取與儲存。 簽署受測者同意書 量測最大自主收縮 之肌電訊號 檢查自行車胎壓、 齒比及煞車 量測及紀錄受測者 基本資料 調整座椅高度 及騎乘姿勢 亂數決定實驗順序 進行實驗 詢問受測者 是否感覺疲勞 重複實驗三次 更改實驗條件 檢查數據之完整性 資料整理建檔 統計分析 量測及紀錄 環境參數 圖 16 實驗步驟流程圖
29 2.3.3 實驗終止條件
Fraia 所整理以往自行車科學相關研究對於保護受測者安全的一 些終止實驗的條件如下(Faria, Parker et al. 2005):
I. 受測者無法保持 70 (Padilla, Mujika et al. 1999; Lucia, Hoyos et al. 2002)、80(Swensen, Harnish et al. 1999)或 90rpm(Liedl, Swain et al. 1999; Impellizzeri, Sassi et al. 2002)的踩踏率。
II. 受測者自主提出疲勞(Bentley, Wilson et al. 1998; Bishop, Jenkins et al. 1998; Laursen and Jenkins 2002)。
III. 無法穩定維持指定功率 (Schabort, Hawley et al. 1998)。 IV. 攝氧量出現高原現象 (Plateau)(Marsh and Martin 1997)。 V. 呼吸交換率>1(Moseley and Jeukendrup 2001)。
VI. 心跳峰值超過 90%(Laursen, Shing et al. 2002)。
VII. 心跳率超過 90% (HR=220-age) (Takaishi, Ishida et al. 2002)。 根據以上文獻且考量目前量測儀器之限制,本實驗終止實驗之條 件將定為: I. 無法穩定維持指定速率。 II. 受測者自主提出疲勞。 III. 下雨或其他不可抗拒之因素。 2.4 資料分析
30
本研究內之運算程式皆使用 LabVIEW8.6 (LabVIEW 8.6, National Instruments Corp., Austin, TX, USA) 與 Matlab R2007a (MathWorks Inc., USA) 撰寫。
2.4.1 阻抗迴歸 踩踏時人體所產生的能量被曲柄鏈輪系統轉換為轉速和扭力,轉 速與扭力提供整個自行車系統動能、位能以及克服阻抗的能量。然而 室外騎乘阻抗主要來源分為空氣阻力和滾動阻力,如圖 17 所示。故 可推論:功率乘以時間會等於動能與位能之改變量加上空氣阻力與滾 動阻力所做的負功。若可將位能、動能及阻力所產生之負功利用數學 模型模擬,便可得知擬真訓練平台應提供之阻力量值。
31 動能 位能 阻力 之負功 空氣阻力 滾動阻力 踩踏行為 鏈輪傳動 功率 效能展現 消耗功率 本研究欲開發之 騎乘阻抗數學模型 圖 17 騎乘阻抗涵蓋部份示意圖 動能和位能方面,有關參數皆可從「室外自行車參數量測平台」 和其他相關儀器中取得,如:自行車系統(含騎乘者及儀器)的質量與 爬升的高度。本研究中所定義之與動能及位能相關的參數,以及量測 的儀器如圖 18 所示。
32 Energy Potential energy Resistance Mass Height Drag Rolling resistance Coefficient of gravity mgh Equipment mass + Subject mass The vertical height during experiment Constant g=9.81 Scales Slope meter Definition Equipment 圖 18 動能及位能相關參數取得方法
33 阻力所產生之負功方面,如圖 19 所示。由文獻回顧可知空氣阻 力為室外自行車騎乘時主要的阻抗來源之一,而與空氣阻力直接相關 的參數為空氣密度、風阻係數、相對速度(車速與風速)及截面積。其 中空氣密度在本研究中視為常數(
1
.
2
kg
/
m
3),相對速度可利用 車速及風速(風速計)的數據進行向量運算後即可獲得,而截面積與風 阻係數的估計相較之下顯得相對困難。 Energy Potential energy Resistance Mass Drag Rolling resistance Coefficient of drag Coefficient of rolling resistance Coefficient of gravity Frontal area Density of air s A CD 2 2 1 Distance mgs CR Relative velocity 圖 19 阻力所產生負功之參數圖34
關於截面積之估計,過去有學者利用照片進行楔形分割來估算面 積(Swain, Coast et al. 1987; Capelli, Rosa et al. 1993),也有學者利用平 面幾何(Planimetry)進行截面積的計算(Groot, Sargeant et al. 1995),而 在 1999 年 Bassett 提出截面積與體表面積有關,且進一步提出使用俯 握姿勢騎乘者的截面積估算公式(Bassett JR, Kyle et al. 1999)。
0604
.
0
0293
.
0
0.725
0.425
H
M
FA
(1) 其中 FA 為截面積( 2 m );H 身高(m);M 為體重(kg);由此公式 可知截面積與受測者之身高與體重有關。但室外騎乘阻抗不僅僅存在 空氣阻力,同樣於 1999 年 Candau 也發表名為 Coasting-down method 的估算阻抗方法。其方法為要求受測者以設定之速率及踩踏率騎乘於 一個水平的油地氈地面(linoleum flooring)走廊上(光滑、柔軟且未打 蠟),且走廊上方設置三個時序開關(timing switches)。在經過時序開 關之前受測者必頇達到指定之速率,並停止踩踏,直到開始量測後, 受測者必頇以未傳遞動力為原則進行踩踏(pedal without transmitting force),藉此模擬真實騎乘時因下肢運動所引起的擾動(turbulence), 接著再利用量測到的數據利用牛頓第二定律推導出整合空氣阻力與 滾動阻力的阻力估算公式(Candau, Grappe et al. 1999):2
5
.
0
F
C
RM
g
A
C
D (2) 其中
F 為總阻力(N);C 為滾動係數;R M 為質量(kg);g為重35 力加速度( 2 sec / m );
為空氣密度(kg/ m3); A 為有效撞風面積(m2);
為相對速度(m/sec );C 為風阻係數; 其中D C 與D C 以被證明與速R 度無關(Di Prampero, Cortili et al. 1979; Capelli, Rosa et al. 1993; Swain 1994; Grappe, Candau et al. 1997)。根據以上論述,室外阻抗之數學模型必頇建立在以下參數上:騎 乘者的體重、自行車重量自行車與氣流之相對速度。且踩踏所產生的 功,可藉由踏板力量、曲柄長度及移動角度推算,而動能將會隨著踩 踏率固定而無改變量,位能的增加也可藉由坡度及騎乘距離得知。這 代表僅有滾動阻力係數、風阻係數與截面積為未知數。此時便可利用 室外實驗的數據將阻抗所做的負功推算出來,如下式所示。其中 T= 扭矩 (N*m);=移動角度(rad);U =位能改變量 (N*m);Rd =空氣 阻力做功(N*m);Rr =滾動阻力做功(N*m);ACD=截面積*空氣阻力係 數( 2 m );CR=滾動阻力係數。
R D n n n R D r dC
AC
R
D
R
D
R
D
W
W
W
C
R
AC
D
W
R
R
U
Td
2 2 1 1 2 1 2 0
(3) 接著便可利用多元回歸得到模型中的未知係數(風阻係數乘截面36 積與滾動阻力係數),本研究將以單個踩踏循環為回歸觀察個體,濾 除指定車速(3.471 m/s)正負 10%以外之數據後,再利用 Adjusted R square、F-value 與 P-value 等統計參數判斷模型之解釋力及是否具有 統計意義。完成阻抗之數學模型後便可搭配位能與動能提昇所需的能 量進一步完成擬真阻抗的估算,提昇未來擬真訓練平台開發之阻抗準 確性。 2.4.2 表面肌電訊號 本研究將量測受詴者慣用側之單腳四條肌肉分別為:股外側肌 (Vastus lateralis, VL)、股直肌(Rectus femoris, RF)、外側腓腸肌
(Gastrocnemius lateralis, GL) 以及脛骨前肌(Tibialis anterior, TA) 。陳 述騎乘自行車時肌肉活動情形的方法,莫過於將完整的踩踏周期 (0~360 度)中各肌肉的肌電訊號圖之橫軸由時間序列轉換成角度序 列。肌電訊號再進一步分析前,必頇先經過平滑化正規化等步驟。而 幾種常見的平滑化方法,分別是移動平均(moving average) 、root mean square (RMS) (Laplaud, Hug et al. 2006; Dorel, Couturier et al. 2008; Duc, Bertucci et al. 2008)和 integrated EMG (iEMG)(Ericson 1986; Jorge and Hull 1986; TakaishiI, Yamamoto et al. 1998),而 RMS 是比較被推薦 的(Basmajian and De Luca 1985)。待平滑化處理完畢後,接著進行正 規化。而一般常見的肌電訊號正規化方法為:等張最大自主收縮
37
(Isometric maximal voluntary contraction, IMVC)(Ericson 1986; Marsh and Martin 1995),但由於在踩踏期間,等張最大自主收縮和肌電訊號 之間沒有顯著的關係,使等張最大自主收縮可以用來代表最大神經驅 動,故這個標準化的方法被 Mirka 強烈的質疑(Mirka 1991),取而代 之的則是建議利用實驗過程中最大的自主收縮當作標準。但 Burden 在 1999 年統整以上觀點後提出:由於肌電訊號之正規化的方法各有 其之優點,故目前並沒有一個最佳的參數去解釋肌肉活化的情形 (Burden and Bartlett 1999),但若是比較條件或肌肉之間相對的活化程 度,而不要求絕對值所代表之意義,則可以利用完整踩踏循環中的肌 電訊號峰值(Peak value)或平均值(Mean value)進行相對的比較(Hug and Dorel 2009)。
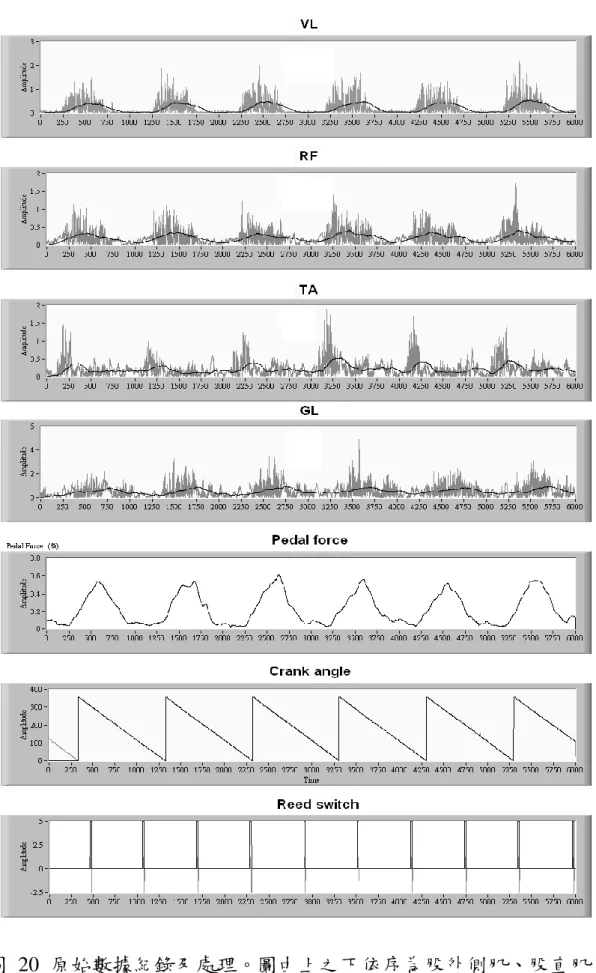
最終本研究決定採用移動平均(Moving average, window size = 200ms)進行平滑化,且利用該受測者騎乘於水泥平路時各肌肉的極值 作為基準值進行正規化。並利用完整踩踏循環之肌電訊號的峰值與平 均值代表該條件該肌肉之活化情形,再進行比對。而曲柄角度之定義 上死點為 0 度曲柄逆時針旋轉(驅動車體前進方向)為正值增加,依序 通過 90 度、180 度(下死點)以及 270 度最後回到上死點。而本研究利 用 LVIEW8.6 撰寫一程式用以紀錄及處理相關數據如圖 20 所示。圖 為十位受測者中的一位受測者的其中一個實驗,圖由上之下依序為股
38 外側肌、股直肌、脛骨前肌以及外側腓腸肌的肌電訊號圖,接著為曲 柄角度、踏板力量以及轉速。在肌電訊號圖方面,縱軸為正規化後之 結果(柏油平路最大值為 1),橫軸為時間序列單位為毫秒,灰線為原 始資料加上絕對值及正規化之圖形,黑線為再進行移動平均的處理後 之圖形。曲柄角度之縱軸為角度單位為度,灰線為解碼後之資料,黑 線為將不完整之訊號及不正常之跳動濾除後之結果。而在踏板力量圖 形之縱軸為對受測者體重正規化後之結果。最後在轉速方面如先前所 提及之本研究利用磁簧開關紀錄後輪之轉動速率,藉以推估騎乘時之 速度。由圖 20 可大致看出踩踏過程中肌電訊號與踏板力量之圖形與 曲柄角度之間都有著類似之週期,此代表騎乘時下肢的反應的確有著 協調且有次序的特徵。
39
圖 20 原始數據紀錄及處理。圖由上之下依序為股外側肌、股直肌、 脛骨前肌以及外側腓腸肌的肌電訊號圖,接著為曲柄角度、踏板力量
40 以及轉速。在肌電訊號圖方面,縱軸為正規化後之結果(柏油平路最 大值為 1),橫軸為時間序列單位為毫秒,灰線為原始資料加上絕對值 及正規化之圖形,黑線為再進行移動平均的處理後之圖形。曲柄角度 之縱軸為角度單位為度,灰線為解碼後之資料,黑線為將不完整之訊 號及不正常之跳動濾除後之結果。而在踏板力量圖形之縱軸為對受測 者體重正規化後之結果。最後在轉速方面如先前所提及之本研究利用 磁簧開關紀錄後輪之轉動速率,藉以推估騎乘時之速度。 至於統計分析部分將採用重複實驗單因子變異數分析 (Repeat measurement one-way ANOVA) 分別比較每個受測者在不同坡度(柏 油 8%上坡、柏油 4%上坡、柏油平路)下四條肌肉(VL、RF、TA、GL) 的特徵值(峰值、平均值)與踩踏扭矩是否具有顯著的差異。再使用 paired t-test,進行上述參數之配對分析(如:不同路面對 VL 之極值), 進而觀察結果是否具有統計上的差異,檢驗水準(significant level) α =0.05。至於不同路面(水泥平路與柏油平路)的比較,由於只有兩個條 件,故不進行變異數分析而直接使用 paired t-test 分析,檢驗水準 (significant level)還是維持 α=0.05。
41
三、結果與討論
本章將以室外騎乘阻抗迴歸、路面對肌肉活動情形的影響及坡度 對肌肉活動情形的影響,共三個部分分別進行實驗結果的展現與探 討,且實驗結果均以擁有完整實驗資料的十位男性受測者的實驗數據 進行說明。受測者資訊如表 1。 表 1 受測者基本資訊 Height (cm) Mass (kg) Age (yrs) Trochanter length (cm) Mean(SD) 174.7 (4.2) 73.3 (13.0) 24.4 (1.0) 91.0 (2.3) 3.1 阻抗迴歸相關 3.1.1 實驗結果 根據研究方法中所提及之阻抗迴歸方法,本研究將以單個踩踏循 環作為回歸觀察個體。濾除指定車速 (3.471 m/s) 正負 10%以外之數 據後,共餘 331 個觀察個體,如圖 21。接著將資料匯入 Microsoft Office Excel 2007 (Microsoft Corporation, USA) 進行多元迴歸,迴歸結果如 表 2 及表 3 所示,至於迴歸係數如表 4 所示。42 圖 21 實驗數據散佈圖(縱軸為 0.5 倍的空氣密度乘以相對速度平 方,橫軸為曲柄做功減去位能改變量) 表 2 阻抗迴歸之參數 Regression Analysis Multiple R 0.909 R squire 0.826 Adjusted R squire 0.822 standard error 80.650 Observation number 331.000
43 表 3 阻抗迴歸之變異數分析 df SS MS F SF Regression 3.000 10110548.198 3370182.733 518.143 7.39E-124 Residuals 328.000 2133427.593 6504.352 Total 331.000 12243975.791 表 4 阻抗迴歸係數
Coefficients SE t Stat P-value Lower 95% Upper 95% 0.783 0.326 2.402 0.017 0.142 1.424 ) (Cement CR 0.048 0.004 10.976 4.40E-24 0.039 0.056 ) ( Asphalt CR 0.045 0.004 12.714 2.21E-30 0.038 0.052 D AC
44 由上述資料可得知本研究之空氣阻力與滾動阻力的阻力估算公 式為:
F 為總阻力(N);M 為質量(kg);
為相對速度(m/sec ); 水泥路面: 2783
.
0
2
.
1
5
.
0
81
.
9
048
.
0
F
M
(4) 柏油路面: 2783
.
0
2
.
1
5
.
0
81
.
9
045
.
0
F
M
(5) 由調整的 R 平方值可說明此模型具有 82.2%的迴歸解釋力。且 F 檢定統計量的顯著值 7.39E-124 小於
0
.
05
,顯示上述 82.2%的迴 歸解釋力是具有統計意義。而迴歸係數方面三個變數之 P 值皆小於05
.
0
,顯示三個變數對此模型皆具有顯著之影響。 3.1.2 討論Candau 在 1999 年利用 coasting-down method 計算空氣阻力以及 滾動阻力的結果分別為: 0001 . 0 00563 . 0 ; m 0.007 0.333 2 R D C
AC (Candau, Grappe et al.
1999);而本研究之結果為:ACD 0.7830.326m2;CR 0.0450.004(柏 油) ;CR 0.0480.004(水泥)。 本研究與 Candau 之結果除了路面條件的差異外(油地氈地面;柏 油與水泥),最大的差異可能來自於受測者與使用車輛之不同。儘管 該文獻之研究目標也是在於環境阻抗 (空氣阻力與滾動阻力) 係數 之估算,但 Candau 的應用面著重於專業選手在競賽時騎乘策略之規
45 劃,反觀本研究則是著重於量化一般民眾在騎乘時與環境之間的互動 與感受。而其中的差別在於受測者族群之選擇 (Candau 僅使用一個 經驗豐富的車手,本實驗使用十個未受過訓練的一般民眾),且除了 受測者經驗及技巧之差異外,實驗用的服裝、車架、車重、手把、輪 胎種類及胎壓等許多參數都將隨著應用目的的不同而有所出入,而這 些參數之差異皆分別與空氣阻力係數以及滾動阻力係數有直接的關 係,故導致係數估算結果的差異。且 Candau 在該篇文獻中也提到 coasting-down method 可能會低估滾動阻力的影響。
46 3.2 坡度與路面對肌肉活動情形的影響 如資料分析中所提及本研究採用移動平均(Window size = 200ms) 進行平滑化,且利用該受測者騎乘於水泥平路時各肌肉的極值作為基 準值進行正規化。並利用完整踩踏循環之肌電訊號的峰值與平均值代 表該條件該肌肉之活化情形,再進行比對。 3.2.1 坡度對肌肉活動情形之實驗結果 十個受測者在踩踏期間曲柄扭矩及四條下肢肌肉(股外側肌 (VL)、股直肌(RF)、脛骨前肌(TA)、外側腓腸肌(GL))在不同實驗條件 時之資料依序如圖 22~圖 26 所示。 圖 22 十位受測者在不同實驗條件下,踏板力量之平均值
47
圖 23 十位受測者在不同實驗條件下,股外側肌肌電訊號之平均值
48
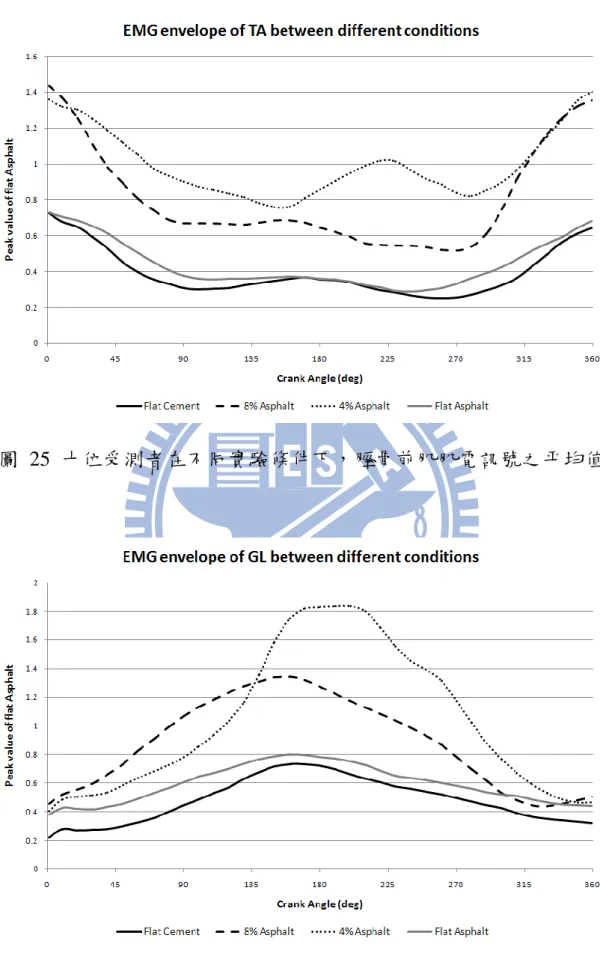
圖 25 十位受測者在不同實驗條件下,脛骨前肌肌電訊號之平均值
49 進一步依據不同之坡度條件(0%Asphalt、4%Asphalt、8%Asphalt) 進行變異數分析,其結果如表 5 所示。其中股外側肌與曲柄扭矩 (Torque)無論是在峰值或平均值之 P 值皆小於 0.05。顯示不同坡度 下,以固定踩踏率運動時,扭矩與股外側肌之活動情形皆會隨著坡度 的改變而改變。 表 5 下肢肌肉與曲柄扭矩在不同坡度下之變異數分析 Peak Average
ANOVA F P value F P value
VL 8.215 0.002 6.202 0.006 RF 1.962 0.160 1.142 0.334 TA 1.611 0.218 1.565 0.227 GL 1.208 0.314 1.133 0.337 Torque 30.139 <0.001 48.969 <0.001 接著利用 paired t-test,進行參數之配對分析。圖 27 為不同坡度 下曲柄扭矩峰值之平均值與標準差,其中騎乘於坡度為 8%的上坡之 曲柄扭矩峰值比坡度為 4%的上坡高出 29%、比平坦路面高出 126%, 而 4%上坡也比平坦路面高出 75%,且以上均具有統計上的差異 (P<0.01)。
50 圖 27 十位受測者在不同坡度下扭矩峰值之平均值與標準差(縱軸單 位為扭矩對體重進行正規化。**:p<0.01,paired t-tests) 圖 28 為不同坡度下肌電訊號峰值之平均值與標準差,其中股外 側肌、股直肌、脛骨前肌以及外側腓腸肌在騎乘於坡度為 8%的上坡 之肌電訊號峰值皆明顯高於平坦路面,肌電訊號峰值平均提高 92%, 且其有統計上顯著的差異(P<0.05)。且股外側肌在 4%的上坡比起平坦 路面肌電訊號峰值也增加了 96%(P<0.01)。
51 圖 28 十位受測者在不同坡度下肌電訊號峰值之平均值與標準差(縱 軸為對柏油平路峰值進行正規化之肌電訊號。*:p<0.05,**:p<0.001, paired t-tests) 圖 29 為不同坡度下曲柄扭矩平均值之平均值與標準差,其中騎 乘於坡度為 8%的上坡之曲柄扭矩平均值比坡度為 4%的上坡高出 38%、比平坦路面高出 260%,而 4%上坡也比平坦路面高出 160%, 且以上均具有統計上的差異(P<0.01)。
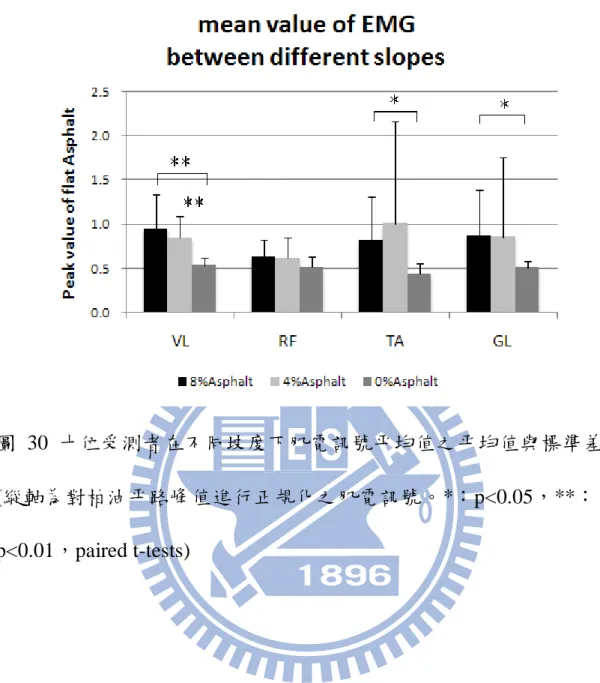
52 圖 29 十位受測者在不同坡度下扭矩平均值之平均值與標準差(縱軸 單位為扭矩對體重進行正規化。**:p<0.01,paired t-tests) 圖 28 為不同坡度下肌電訊號平均值之平均值與標準差,其中除 了股直肌外,股外側肌、脛骨前肌以及外側腓腸肌在騎乘於坡度為 8%的上坡之肌電訊號平均值依序以 76%、85%、70%的比例高於平坦 路面,且其有統計上顯著的差異(P<0.05)。且股外側肌在 4%的上坡比 起平坦路面肌電訊號峰值也增加了 57% (P<0.01)。
53
圖 30 十位受測者在不同坡度下肌電訊號平均值之平均值與標準差 (縱軸為對柏油平路峰值進行正規化之肌電訊號。*:p<0.05,**: p<0.01,paired t-tests)
54 3.2.2 路面對肌肉活動情形之實驗結果 十個受測者在踩踏期間四條下肢肌肉(股外側肌(VL)、股直肌 (RF)、脛骨前肌(TA)、外側腓腸肌(GL))與曲柄扭矩之資料分別依據不 同之路面條件(0%Asphalt、0%Cement)進行分析,由於路面條件只有 兩個變項,故直接使用 paired t-test,進行參數之配對分析其結果如圖 31~圖 34 所示。其中除外側腓腸肌的峰值與平均值在柏油路面分別 以 32%及 31%的比例顯著高於水泥路面外(P<0.05),其他肌肉及扭矩 均無統計上之證據,顯示以固定踩踏率運動時,不同路面之間的差異。
55
圖 31 十位受測者在不同路面下扭矩峰值之平均值與標準差(縱軸單 位為扭矩對體重進行正規化。)
56
圖 32 十位受測者在不同路面下肌電訊號峰值之平均值與標準差(縱 軸為對柏油平路峰值進行正規化之肌電訊號。*:p<0.05,paired t-test)
57
圖 33 十位受測者在不同路面下扭矩平均值之平均值與標準差(縱軸 單位為扭矩對體重進行正規化。)
58 圖 34 十位受測者在不同路面下肌電訊號峰值之平均值與標準差(縱 軸為對柏油平路平均值進行正規化之肌電訊號。*:p<0.05,paired t-test) 3.2.3 討論 由上述統計資料顯示,固定踩踏率下,騎乘於不同坡度時,曲柄 之扭矩與坡度呈現正相關;而騎乘於不同路面時則沒有顯著的差異。 此外隨著坡度的改變股外側肌、脛骨前肌與外側腓腸肌都將隨著坡度 的上升而上升,且均有著統計上顯著的差異(P 值<0.05),其中又以股 外側更為明顯(P 值<0.01),代表股外側肌的活化情形與曲柄扭矩都將
59
隨著坡度上升而上升。故本研究推論股外側肌為主要供給踩踏時所需 能量的肌肉。Ryan and Gregor 於 1992 年利用 18 位經驗豐富的自行 車選手於賽季結束後進行室內實驗,該研究指出單關節肌肉
(mono-articular muscles)為踩踏過程中主要提供能量的肌肉,而雙關節 肌肉(bi-articular muscles)在踩踏過程中則扮演著傳遞能量而非提供 能量的肌肉(Ryan and Gregor 1992),而在本研究中所探討的四條肌 肉,股外側肌與脛骨前肌屬於單關節肌肉,股直肌與外側腓腸肌則為 雙關節肌肉;故本研究利用一般民眾於室外進行實驗的數據對股外側 肌所做出之推論,與 Ryan and Gregor 利用專業騎士進行室內實驗之 結果有著一致的結果。 然而進一步探討同樣是單關節肌肉之脛骨前肌在統計上之顯著 程度為何小於股外側肌之原因,本研究進行了脛骨前肌之肌電訊號圖 的比對,發現脛骨前肌之肌電訊號的圖形,於不同受測者之間沒有股 外側肌般的規律。此現象表示脛骨前肌在受測者之間的個體差異較 大,進而影響其顯著程度之統計分析。本研究認為這樣的現象表示脛 骨前肌的肌肉活化模式是沒有一般性的,其造成的原因可能為受測者 間有著不同的踩踏策略,如當踩踏循環經過下死點後,踝關節會隨著 下肢一同屈曲(flexion),若受測者主動進行踝關節屈曲之動作,此受 測者之脛骨前肌的肌電訊號便會不同於被動進行踝關節屈曲之受測
60
者。而本研究之發現也已在近期的文獻中被解釋:Dorel 利用室內訓 練台以及 11 位三鐵選手的下肢肌肉研究,該研究指出脛骨前肌和外 側腓腸肌這兩條肌肉於踩踏期間的個體(between subject)差異性很 大,導致在踩踏過程肌肉的活化模式有兩種完全不同型態,如圖 35 所示(Dorel, Couturier et al. 2008)。而本研究利用室外實驗所蒐集的數 據中也有著一致的結果,由肌電訊號的波形 (單峰或雙峰)便可看出 端倪,如圖 36 至圖 39 所示。
61
圖 35 在踩踏時脛骨前肌的兩種不同活化模式,12位受測者中有8位 歸於圖A群組,另外四位則歸於圖B。其中實線表示平均值,虛線為 平均值加上一倍標準差(圖片來自於Dorel et al. (2007))。
62
圖 36 受測者 S02 單一踩踏循環之脛骨前肌活化模式(雙峰)
63
圖 38 受測者 S00 單一踩踏循環之外側腓腸肌活化模式(雙峰)
64
在股直肌部分,本研究由下肢肌肉與曲柄扭矩在不同坡度下之變 異數分析中的結果,指出無論是在峰值或平均值,股直肌皆無顯著差 異(P 值>0.05)。根據此現象,除了可用 Ryan and Gregor 所提及的雙 關節肌肉在踩踏過程中則扮演著傳遞能量而非提供能量的肌肉來解 釋外,另有許多文獻直接指出股直肌與踩踏率之間有著相當顯著之關 係(Marsh and Martin 1995; Neptune, Kautz et al. 1997; Baum and Li 2003; Sanderson, Martin et al. 2006),主要的論點在於,提升踩踏率的 同時代表著膝關節屈曲/伸展(flexion/extension) 的速度必頇隨之增 加。本研究之踩踏率為定值,依據上述文獻之結果,在踩踏率固定的 情況下股直肌在各條件之間,確實無顯著之差異。
而上述的這些結果,都處在相同踩踏率的條件下。而一般自行車 實驗中,則是以最大有氧功率(maximal aerobic power , MAP)等騎士自 身的新陳代謝參數來固定踩踏之功率最為常見。因為利用各受測者自 身的生理條件正規化後進行實驗,可有效減少受測者個體間之差異, 並可以更為客觀的解釋肌肉活化程度。但有鑑於監控新陳代數參數之 儀器之體積與高昂之價格,現階段實是不便用於室外實驗之中,若無 法即時量測其參數之變化值,給予控制,便無法達成減少個體差異的 目的。
65 3.3 研究限制 騎乘自行車時,主要的能量來自腳對踏板施力而對曲柄產生之力 矩,本研究量測腳對踏板之施力,藉由與曲柄長度之內積計算踩踏力 矩。踏板在踩踏過程中相對於地面之角度,本研究中視為水平,但事 實上先前研究則發現踏板的角度會隨曲柄角度改變(Benjamin J. Fregly 1996),這可能導致踩踏力矩之計算有誤。踏板角度的量測方 式,過去的研究大多利用踏板與曲柄間之編碼器進行測量(Benjamin J. Fregly 1996; L.M. Rogers 2004),但本研究受限於資料整合與截取系統 之數位訊號截取頻道數,無法另外加裝編碼器,固未來研究可考慮使 用類比訊號之重力加速度感測器(G sensor)與震動感應器(Shock sensor)之差值判斷重力相對於踏板之角度,進而計算出踏板相對於曲 柄之角度。自行車能量來源之曲柄力矩計算,目前是以兩倍之單側所 做的功做為能量輸入之總功,與實際產生之總功可能有差異,故雙側 曲柄產生之總力矩亦為值得注意的地方。 實驗條件的選定:本研究為了同時顧及受測者的安全以及儀器使 用的考量下,選擇在國立交通大學內,尋找符合實驗距離且坡度固定 的路面進行騎乘實驗。但實際的外在環境並非僅有這些坡度及路面條 件。未來可以考慮找更多不同坡度及不同路面的坡度 實驗平台重量與種類:為了量測與紀錄實驗數據,實驗器材皆頇
66 置於自行車上,故實驗平台之重量較一般市面上的自行車高出許多; 且現在自行車的種類繁多,對於各種車型之間的實驗結果是否一致, 則還有待商榷。 受測者的選定:本實驗僅採用十位 20-30 歲的男性受測者,但近 年來自行車普及,不論男女老少皆有使用者,實驗數據是否能套用在 不同年齡及性別上,也需要再進一步討論。 實驗控制參數:本研究目標是模擬室外真實騎乘實驗,故無法如 同先前室內研究固定功率輸出或是新陳代謝參數,僅能控制踩踏率等 物理參數。
67
四、結論
本研究於實驗前完成室外自行車參數量測平台,並順利進行室外 實驗。本研究於實驗中使用鋁合金鑽石型車架、抓握彎把之姿勢、一 般內外胎(Clincher tires)、胎壓 700kPa、著一般便服(非專業車衣及車 褲)等條件,本研究於阻抗迴歸之結果為:在 95%的信心水準下截面 積乘上空氣阻力係數 (ACD)介於 0.142 至 1.424 之間、水泥路面之滾 動阻力係數介於 0.039 至 0.056 之間、柏油路面之滾動阻力係數則介 於 0.038~0.052 之間,而數學模型如下所示。 水泥路面: 2
783
.
0
2
.
1
5
.
0
81
.
9
048
.
0
F
M
柏油路面: 2783
.
0
2
.
1
5
.
0
81
.
9
045
.
0
F
M
而肌電訊號分析方面,在不同坡度下,曲柄扭矩與股外側肌之肌 肉活化程度隨著坡度上升而上升(P<0.001)。在不同路面下,外側腓腸 肌之活化程度在柏油路面下高於水泥路面(肌電訊號峰值增加 32%, 平均值增加 31%)(P<0.05)。此外本研究由室外實驗驗證以下事項:1. 踩踏率與車速(及齒比)固定的條件下,股外側肌為騎乘時動力提供之 主要肌肉。2. 脛骨前肌與外側腓腸肌,縱使固定踩踏率及姿勢等實 驗條件,也會因受測者騎乘時的策略而產生不同的活化情形。3. 當 踩踏率固定時,踩踏的扭矩增加與股直肌之間無顯著差異。68
五、未來研究方向與建議
根據本研究所使用的阻力估算公式(Candau, Grappe et al. 1999), 與空氣阻力相關之係數包含空氣密度、有效撞風面積、風阻係數與相 對速度。其中,有效撞風面積與騎乘者之體型有關(KYLE 1973),風 阻係數則取決於騎乘者之幾何形狀(Frederic, Grappe 1997),以上二者 與環境狀態無直接相關;剩餘的參數中,相對速度由風速與車速之數 據進行運算取得,空氣密度則在忽略濕度的影響下(Capelli, Rosa et al. 1993)被表示為: 0