國
立
交
通
大
學
電子工程學系 電子研究所
碩 士 論 文
針對通用圖形處理器上設計模糊類神經網路之架構
導向執行緒配對方法
An Architecture-Aware Thread Mapping
Method-ology for Fuzzy Neural Networks on GPGPUs
研 究 生:曾浩原
指導教授:周景揚 教授
針對通用圖形處理器上設計模糊類神經網路之架構
導向執行緒配對方法
An Architecture-Aware Thread Mapping
Methodology for Fuzzy Neural Networks on
GPGPUs
研 究 生:曾浩原 Student:Hao-Yuan Tseng
指導教授
:周景揚 博士 Advisor:Dr. Jing-Yang Jou
國
立 交 通 大 學
電子工程學系
電子研究所
碩
士 論 文
A Thesis
Submitted to Department of Electronics Engineering and Institute of Electronics
College of Electrical and Computer Engineering National Chiao Tung University In Partial Fulfillment of the Requirements
for the Degree of Master of Science
in
Electronics Engineering September 2012
Hsinchu, Taiwan, Republic of China
I
針對通用圖形處理器上設計模糊類神經網路之架構導向執
行緒配對方法
學生:曾浩原
指導教授:周景揚博士
國立交通大學
電子工程學系
電子研究所碩士班
摘 要
模糊類神經網路(FNN)被廣泛的使用在機器學習的應用上,如分類。它藉由結構和 參數學習,以及根據訓練樣本和網路輸出的關係來建構一個網路。隨著輸入特性個數 和訓練樣本的增加,學習會越來越耗時,所以一些 FNN 平行設計被提出來加速學習的 過程。但是在 FNN 平行設計的過程中,為了有效利用硬體資源,必須要考慮執行緒對 應和架構的相容性。在本篇論文,我們提出了一個包含架構導向執行緒配對方法(ATM) 對於平行 FNN 的設計流程。ATM 在不同特性的訓練樣本和架構的情況下可以找出一個好 的執行緒配對,來達到硬體的有效利用。在實驗部分,我們的方法和前人的作法相比, 效能可以得到明顯的改善。II
An Architecture-Aware Thread Mapping Methodology for
Fuzzy Neural Networks on GPGPUs
Student:Hao-Yuan Tseng
Advisor:Dr. Jing-Yang Jou
Department of Electronics Engineering
Institute of Electronics
National Chiao Tung University
ABSTRACT
The fuzzy neural network (FNN) is extensively used in machine learning applications,
such as classifications. It uses structure and parameter learning phases to create a network
according to the correlation between input training samples and network outputs. Since the
learning phases are getting more time consuming when number of input attributes of training
samples increases, some parallel FNN designs are proposed to speed up the learning
procedure. While designing an efficient parallel FNN, the thread mapping and the architecture
scalability should be taken into consideration to achieve efficient hardware utilization. In this
thesis, we present a parallel FNN design flow including architecture-aware thread mapping
(ATM) methodology. The proposed ATM efficiently utilizes the hardware resource on
GPGPUs by finding a good thread mapping using different training samples and architectures
with different characteristics. The experimental results show that our approach can achieve
III
Acknowledgements
I greatly appreciate my advisors Dr. Jing-Yang Jou. Not only did he made many beneficial
suggestions for me but also provide a resource-intensive environment. I am also really
thankful to Dr. Bo-Cheng Lai for his guidance, valuable suggestions, and encouragement
during these years. I would like to thank Hsien-Kai Kuo for his discussion and help on my
research. Specially thank to all member of EDA Lab for their friendship and company. Finally,
I would like to express my sincerely acknowledgements to my family and my friends for their
IV
Contents
摘 要 ... I ABSTRACT ... II Acknowledgements ... III Chapter 1 Introduction ... 1 1.1 Machine Learning ... 11.2 Fuzzy Neural Network ... 2
1.3 Parallel FNN ... 4
1.4 Thesis Organization ... 5
Chapter 2 Background & Preliminary ... 6
2.1 GPGPU Computing ... 6
2.1.1 Fermi Architecture ... 7
2.1.2 CUDA Programming Model ... 8
2.2 The Self-Constructing Neural Fuzzy Network (SONFIN) ... 10
2.3 Related Work ... 13
2.4 Motivation ... 15
Chapter 3 Our Proposed Approach ... 17
3.1 Bottleneck Analysis……….18
3.2 GPGPU Partitioning……… 20
3.3 Fine-Grain Task Decomposition………... 22
3.4 Special Function Transformation & Memory Coalescing……… 23
3.5 Task Coarsening………...25
3.6 Task to Thread Binding……….. 29
Chapter 4 Experimental Results ... 31
4.1 Experiment Environment...31
4.2 Comparison between Different Optimizations……….…...33
4.3 Discussion of Input Scalability………34
4.4 Discussion of Architecture scalability……….41
4.5 Total Runtime.……….42
Chapter 5 Conclusions & Future Works ... 44
V
List of Tables
Table I Kernel time with different number of rules……….35 Table II Kernel time of different number of dim………..38
VI
List of Figures
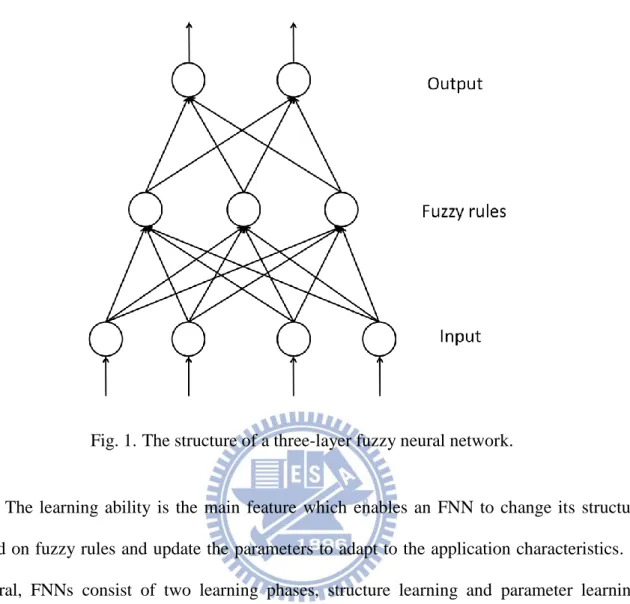
Fig. 1 The structure of a three-layer fuzzy neural network.………3
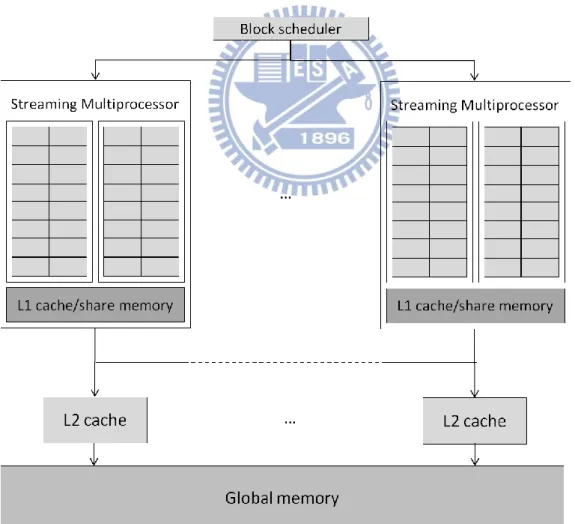
Fig. 2NVIDIA Fermi architecture.…………..………...………...6
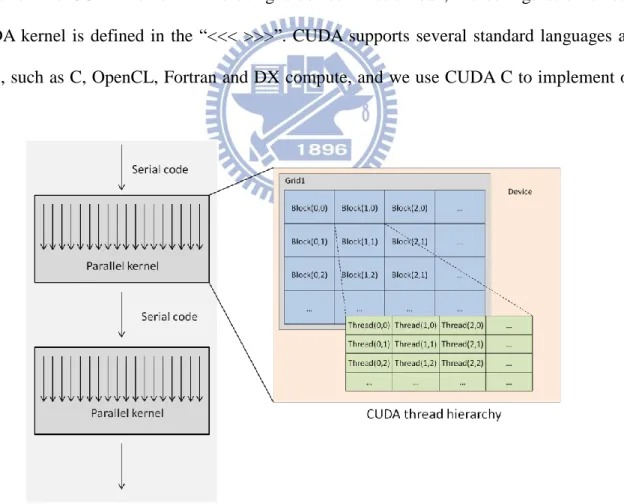
Fig. 3 CUDA programming model..………..8
Fig. 4 Device code and device function call...9
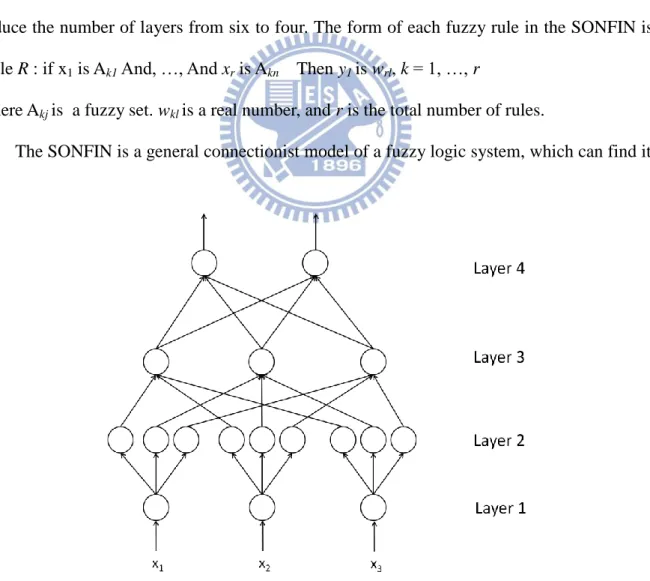
Fig. 5 Modified structure of the SONFIN. ………..……….10
Fig. 6Flow chart of the SONFIN……….12
Fig. 7Design flow of a parallel SONFIN on a GPGPU………...18
Fig. 8Flow chart of the SONFIN……….19
Fig. 9Pseudo code of (a) gaussian member function and (b) update parameter………...20
Fig. 10GPGPU partitioning of the SONFIN………...21
Fig. 11Task Matrix of the SONFIN with 3 dim and 3 rules………22
Fig. 12Coalesced memory access. (a) non-coalesced memory access. (b) coalesced memory access.………...24
Fig. 13Data layout of parallel SONFIN………24
Fig. 14 Task coarsening. ………25
Fig. 15 Two schemes of task coarsening. (a) column-based coarsening. (b) row-based coarsening.………..27
Fig. 16 TM’ to TH binding……….30
Fig. 17 Timing distribution for parallel SONFIN………...30
Fig. 18 Kernel time comparison between each optimizations………32
Fig. 19 Kernel time comparison between GPU-FNN and our approach……….36
Fig. 20 Kernel time trend of different number of rules……….39
VII
1
Chapter 1
Introduction
1.1 Machine Learning
Machine learning is a popular technique over the past two decades, and it is applied to
many applications including weather forecast and image recognition. And many researchers
think it is the best way progress towards human-level AI (artificial intelligence). Machine
learning is so pervasive today that you probably use it many times a day without knowing it.
The most important feature of machine learning is the generalization, which lets a machine
learning algorithm be able to perform accurately on new, unseen examples after training on a
data set. And this feature makes machine learning so powerful and popular. Along with the
increasing requirement of machine automation, machine learning will be widely used in
human’s daily life. Therefore, due to the potential of development of machine learning, many
approaches of machine learning have been proposed in the two decades: decision tree learning,
association rule learning, artificial neural networks, genetic programming and fuzzy neural
network. In this thesis, the fuzzy neural network is used because it takes advantages of
artificial neural network which employs the concept of neural network and fuzzy logic system
2
1.2 Fuzzy Neural Network
Fuzzy neural networks (FNNs) have been applied in many areas including classification
[1] and pattern recognition and so on. A fuzzy neural network is a hybrid system which
combines the features of artificial neural networks (ANNs) and fuzzy logic systems (FLSs).
These two techniques have particular computational properties including advantages and
disadvantages. For example, ANNs are good at recognizing patterns, but they are not good at
specifying the source cause of the decisions. On the contrary, FLSs are good at identifying the
source behind the decisions using fuzzy if-then rules, but they cannot automatically generate
the rules. Furthermore, a fuzzy logic system consists of lots of fuzzy rules, but it is difficult
for human to find the proper number of rules which are related to a great deal of training
samples and network outputs of a complex system. A fuzzy neural network (FNN) is then
emerged to break these limitations. An FNN contains the advantages of an ANN and a FLS,
such as learning ability, easy generalization, fault tolerance and flexibility.
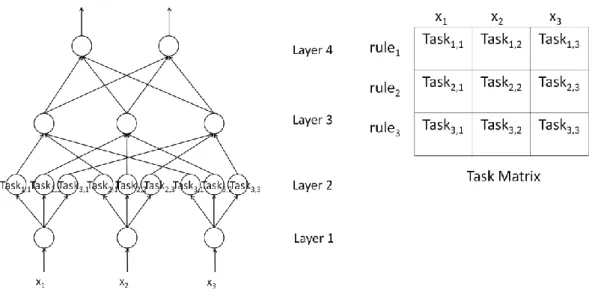
The major learning structures of FNNs can be represented as a three-layer learning
structure. During the learning process, a set of training samples are passed though the three
learning layers as shown in Fig. 1. The first layer corresponds to fetch the training samples
and perform the corresponding pre-procedures. The second layer performs the fuzzy logic
according to a set of fuzzy rules. Finally, the third layer generates the output results. However,
the implementation of each layer can be extended to several layers based on the concept of the
three-layer FNN structure. Note that every training sample has many attributes, and we use
3
The learning ability is the main feature which enables an FNN to change its structure
based on fuzzy rules and update the parameters to adapt to the application characteristics. In
general, FNNs consist of two learning phases, structure learning and parameter learning.
Structure learning modifies the FNN structure to build the correlation of training samples and
fuzzy rules, while the parameter learning tunes the parameters within the network to provide a
more accurate model. Many variations of FNNs have been proposed during the past two
decades [2] ~[16]. However, most of the FNNs focus mainly on building an accurate network
model while putting the runtime of learning as low priority in the tradeoff between accuracy
and learning time. The long learning phases are fine if they are performed off-line. However,
it becomes a serious concern for applications that demand fast learning and model
development, such as stock prediction and weather forecast. These applications require not
only a high quality network model, but also fast learning phases. To address this issue, the
Self-Constructing Neural Fuzzy Inference Network (SONFIN) was proposed in 1998 [3]. Fig. 1. The structure of a three-layer fuzzy neural network.
4
Different from most conventional FNNs, the SONFIN is designed to be an on-line
self-constructing neural inference network. The SONFIN is a general connectionist model of a
fuzzy logic system, which can find its optimal structure and parameters automatically. The
conventional FNNs perform the structure leaning and the parameter learning sequentially. The
substantial runtime makes FNNs with sequential learning scheme only suitable for off-line
operations. Nevertheless, the SONFIN does the structure learning and the parameter learning
simultaneously so that the SONFIN is suitable for fast on-line learning. Moreover, because
the conventional way of grid type partition [2] of the input space increases the number of
rules exponentially with the dim. The SONFIN uses the clustering type partition of the input
spaces which can reduce the number of generated fuzzy rules compared to the grid type
partition.
1.3 Parallel FNN
To construct a more accurate model, users would try to increase the number of fuzzy
rules. This approach could significantly aggravate the runtime of learning phases. It may take
several days to train an FNN with a large number of rules and high dim on a high performance
Central Processing Unit (CPU). For example, it takes more than one day to train a widely
used FNN, ANFIS(an adaptive-network-based fuzzy inference system) with 81 rules on a
CPU with Mackey-Glass test bench [5]. Fortunately, due to the nature of a distributed network,
FNNs are usually inherent massive computing parallelism. This feature makes an FNN
suitable to be implemented on many-core systems. In fact, parallel computing has been
proved to be effective to reduce the training time during the learning phases. The
experimental results of GPU-FNN [17] showed up to 78.51x speedup on a handwritten
5
1.4 Thesis Organization
The rests of this thesis are organized as follow. Chapter 2 introduces the background of
FNNs which is used in this thesis. The proposed methodology is introduced in chapter 3.
Chapter 4 shows our experimental results and chapter 5 concludes the contribution of this
6
Chapter 2
Background & Preliminary
This chapter introduces the background and motivation of this work. Section 2.1
introduces the GPGPU computing platform, NVIDIA Fermi architecture and its programming
environment CUDA. Section 2.2 introduces SONFIN, which is a classical type of FNN and
widely used in many domains.
2.1 GPU Computing
7
Graphic Processing Unit (GPU) is originally designed for computer graphics only. The
computations in graphic based applications are often independent, massive and regular. Hence,
the designs of GPUs architecture always focus on computations. On the other hand, the CPU
needs to handle more complicated controls. So the major difference between CPU and GPU is
that, GPU issues a lot of simple processing elements but CPU consists of few complex
processing units. However, due to the increasing complexity of general applications, the
runtime of CPU is getting longer. For this reason, GPU has been applied to various algorithms
in many areas, and this kind of GPU is called general purpose GPU (GPGPU).
2.1.1 Fermi Architecture
NVIDIA is one of the companies that focus on the design of GPGPU. An architecture
announced by NVIDIA Corporation [18] is named Fermi. The Fermi architecture is a
single-instruction-multiple-thread (SIMT) system as shown in Fig. 2; it contains several streaming
multiprocessors (SMs). At the same time, all the SMs can share a unified L2 Cache and
DRAM. There are 32 cores, four special function units and a 64KB local memory which is
only shared among all the CUDA cores in a SM. Each of these cores can be launched in
parallel with a huge amount of threads. For example, NVIDIA Tesla C2050 can launch up to
1536 threads per SM. Meanwhile, NVIDIA provides programmers with the CUDA
programming Model [19] so that the programmers can control thousands of threads on the
8
2.1.2 CUDA Programming Model
CUDA is a parallel programming model that can be run on any number of processors
without recompiling. As shown in Fig. 3, parallel portions of an application are executed on
the device as CUDA kernels. In a CUDA kernel, programmers have to define the CUDA
thread hierarchy. The right hand side of Fig. 3 shows the CUDA thread hierarchy which
contains three levels, grid, block and thread. A CUDA kernel is executed by an array of
threads, and all the threads run the same code. Each thread has its own ID that is used to
compute memory addresses and make control decisions. Fig. 4 shows an example of device
code which is executed in every thread, and the device function call which is used in the main
to launch the CUDA kernel. While using a device function call, the configuration of each
CUDA kernel is defined in the “<<< >>>”. CUDA supports several standard languages and
APIs, such as C, OpenCL, Fortran and DX compute, and we use CUDA C to implement our
9
program in this thesis. And CUDA is supported on common operation system, such as
Windows, Mac OS and Linux.
During the execution of a CUDA kernel, block scheduler issues several thread blocks to
each SM, and each SM further divides thread blocks into warps, which consist of 32 threads,
to carry out a fully parallel execution on the cores. In the Fermi architecture, there are several
restrictions on the maximum number of blocks, warps and threads on each SM which are
different with different computing capability. For example, on a NVIDIA Tesla C2050 graphic
card, the maximum number of thread blocks, warps and threads are 8, 48 and 1533
respectively.
According to the official CUDA programming guide [20], occupancy shows how
effective the hardware is kept busy. It is a ratio of active warps to limit warps which is the
maximum number of warps on a SM. The definition of occupancy is
When defining the CUDA thread hierarchy, the size of thread blocks highly influences the Fig. 4. Device code and device function call.
10
occupancy. For example, limit warps is 48, maximum number of thread blocks is 8, block size
is 32, than there will be 8 thread blocks and 8 warps issued on a SM, so the occupancy is
0.0667. Another example, limit warps is 48, block size is 192, than there will be 8 blocks and
48 warps issued on a SM, so the occupancy is 1. Although higher occupancy does not always
equate to higher performance, low occupancy always interferes with the ability to hide
memory latency, resulting in performance degradation [21].
2.2 The self-constructing neural fuzzy network (SONFIN)
Fig. 5 shows the modified structure of the SONFIN. The original SONFIN structure has
six layers. In order to make the comparison between serial and parallel version easier, we
reduce the number of layers from six to four. The form of each fuzzy rule in the SONFIN is:
Rule R : if x1 is Ak1 And, …, And xr is Akn Then y1 is wrl, k = 1, …, r
where Akj is a fuzzy set. wkl is a real number, and r is the total number of rules.
The SONFIN is a general connectionist model of a fuzzy logic system, which can find its
11
optimal structure and parameters automatically. The function of each layer is described below.
Layer 1:
One node corresponds to one dim. No computation is done in this layer, and each
node transmits input values to the next layer.
Layer 2:
Each node corresponds to one fuzzy set and calculates a membership value. That is,
the membership value which specifies the degree to which input value belongs a fuzzy set
is calculated in this layer. The fuzzy set Akj is employed with the Gaussian membership
function:
where mrj is the center of the fuzzy set and the denotes the width of the fuzzy set. So
the number of fuzzy sets in each dim is equal to the number of fuzzy rules.
Layer 3:
A node in this layer represents one fuzzy rule and performs antecedent matching of a
rule. The following AND operation is performed for each node in layer 3:
where X = [x1, … , xdim]. The number of fuzzy nodes in this layer is equal to the number
of rules.
Layer 4:
This layer contains many output nodes, and the number of output nodes is equal to the
number of output dimension. Each output node performs as a defuzzifier by using a
12
where L is the number of output dimension.
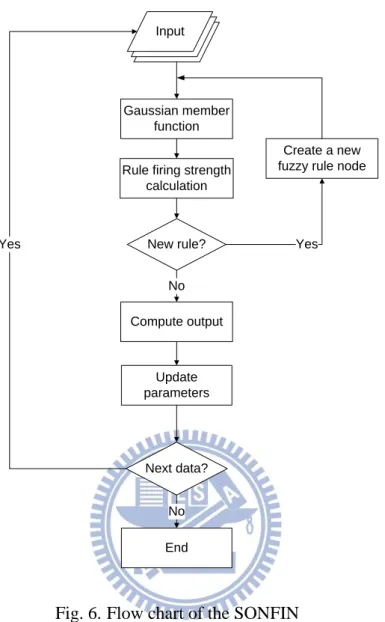
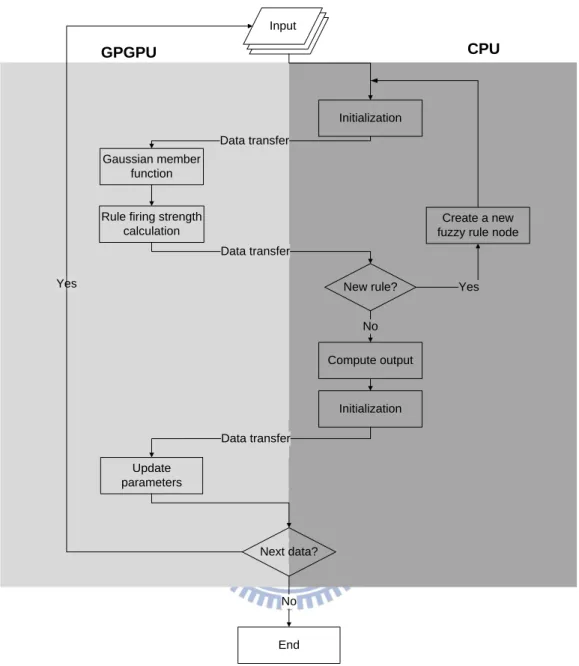
Fig. 6 shows the flow chart of the SONFIN. The flow chart includes the structure learning
and parameter learning. In the structure learning, there are no rules initially, and rules are
constructed by the structure learning. The firing strength in layer 3 is used to decide whether a new fuzzy rule is generated. If , a new rule
is generated, where the is a prespecified threshold that decays with training iteration number. If a new rule is generated, the center and width of corresponding membership
functions are: Input Gaussian member function New rule? Update parameters Next data? Rule firing strength
calculation
Compute output
Create a new fuzzy rule node
No End
Yes Yes No
13
where is a coefficient which determines the overlapping between two rules in the input space.
The parameter learning tunes all the parameters by using a gradient descent algorithm.
The parameters are updated using the equation below:
where is a learning constant which influences the converging speed of the gradient decent algorithm.
2.3 Related Work
FNNs have been studied for decades, and many FNNs with different propertied have
been proposed. ANFIS (Adaptive Neuro-Fuzzy Inference Systems) was proposed in 1993 [2].
It is a widely used FNN which only performs parameter learning. ANFIS uses a hybrid
learning procedure to build the connection between training samples and network output
based on both human knowledge and stipulated input-output data pairs. However, the number
of fuzzy rules of FNNs with only parameter learning increases exponentially with the
14
to reduce the number of generated rules.
Recently, there are some researches focusing on parallel neural networks [22][23] and
parallel fuzzy neural networks [17][24]. [22] implemented the parallel neural network by
mapping the inner-product operation into a matrix multiplication operation. [23] provided an
implementation of the back-propagation algorithm on CUDA, and the author claimed that the
number of threads should be as large as possible to enable the CUDA scheduler to better
utilize the available computational power. The first adaptation of the Fuzzy ARTMAP neural
network on a GPGPU was proposed in [24]. Juang and Chen [17] proposed an
implementation of a zero order Takagi-Sugeno-Kang-type fuzzy neural network on GPU. To
our best knowledge, Juang is the first work which gives a detailed SONFIN design on a
GPGPU. This paper uses this work as the baseline design to compare the experimental results.
However, the performance of a parallel application on the GPGPU heavily depends on
how the developer manages blocks of threads and how effective the GPGPU hardware
resource is used. The thread mapping in NVIDIA CUDA kernel determines how much
parallelism can be exploited by a GPGPU. The thread mapping of the GPU-FNN [17] was
partitioned based on fuzzy rules. In this way, each fuzzy rule in a FNN is mapped on a thread
block. GPU-FNN can make good use of the parallel fuzzy rules in some cases, for example,
192~768 dim with NVIDAI Tesla C2050. However, the range of dim of different applications
can vary significantly. For example, an artificial detection might have tens of dim [25], while
the protein mutant data set could involve more than five thousand dim [26]. The design of a
parallel FNN needs to cover all the possible range of dim from different applications.
Moreover, the current version of CUDA programming model limits a thread block to
accommodate up to 1,024 threads. Therefore, the mapping method proposed in [17] cannot
15
2.4 Motivation
With the approaches of [22] and [24], the efficiency of the hardware utilization is not
considered. The author of [23] claimed that the number of threads should be as large as
possible to enable the CUDA scheduler to better utilize the available computational power.
However, this approach does not take how effective the threads could exploit the GPGPU
architecture into account. In the [17], blocks of threads are partitioned based on fuzzy rules so
thatthe hardware is not efficiently used with some training samples. In summary, the thread
mapping mechanism of these works cannot adapt to training samples with different
characteristics and architecture with different features.
The performance of a parallel application on a GPGPU is highly dependent on how
effective the created threads could exploit the GPGPU architecture. The decisive factor is the
thread mapping mechanism, which connects a multi-thread application to the underlying
many-core system. This becomes a non-trivial problem when implementing an FNN onto a
GPGPU. The main design concerns can be characterized as follows:
(1) Parallelism and coordination. The way an application is parallelized and how the
concurrent computation is coordinated also plays important roles in the GPGPU computing. A
well parallelized application can reduce the computation burden on GPGPUs and achieve
superior performance enhancement. However, an inappropriate design may ignore important
design issues, such as insufficient parallelism or severe resource contention, and cause
degraded performance.
(2) Thread mapping. Although FNNs have massive computation parallelism, the thread
mapping must be well designed because it could significantly influence the efficiency of
hardware utilization. However, an efficient thread mapping design of a parallel FNN is not
straightforward, it must take many factors into concern, such as compute capability of the
16
(3) Adaptability and scalability. It is predicted that the number of cores in a GPGPU will
scale with the advances of semiconductor technology. The performance of a multi-threaded
FNN should automatically scale with the enormous cores provided by the future GPGPUs
without redesign overhead. Moreover, the design should also be adaptable to the changing
number of fuzzy rules and dim of an FNN.
Because of these design concerns abovementioned, we propose an architecture-aware
thread mapping methodology for FNNs on GPGPUs which can create efficient coordination
between concurrent computations and hardware on GPGPUs based on the training samples
17
Chapter 3
Our Proposed Approach
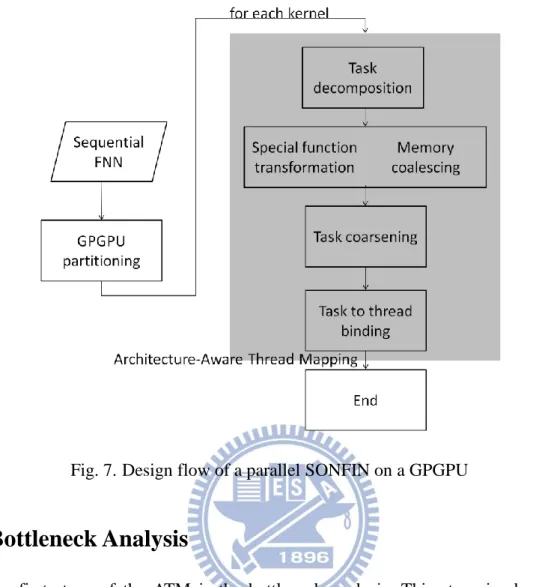
Fig. 7 shows a design flow to parallelize and optimize FNNs on a GPGPU. This thesis
uses the modified SONFIN as the main application to demonstrate the effectiveness of the
proposed design flow. This flow considers several important issues of FNNs using GPGPU
computing. The design flow starts from a sequential FNN application. The first stage shown
in the Fig. 7 is necessary in every parallel design to decide which parts of the program should
be parallelized and executed on GPGPUs. The shaded block on the right hand side of Fig. 7 is
the Architecture-Aware Thread Mapping (ATM). The ATM performs optimizations for each
CUDA kernel, and contains four stages, 1) fine-grain task decomposition, 2) special function
transformation and memory coalescing, 3) task coarsening and 4) task to thread binding. The
18
3.1
Bottleneck Analysis
The first stage of the ATM is the bottleneck analysis. This stage is almost the most
important and essential stage while designing a parallel program. The bottleneck analysis is to
find out bottlenecks that dominate the runtime of the total program. According to Amdahl’s
law, if a fraction f is accelerated by a factor of S, the overall performance speedup is:
In the parallel computing, the is the fraction that can be parallel in a sequential program. And the fraction can be accelerated S times after parallelization. Factor S is decided by how much parallelism of the f part and how well the GPGPU architecture can be exploited. Larger
could increase the impact of S on the overall performance. So it is important to find out which parts have the greatest f through the bottleneck analysis.
19
Because the conformation of an FNN is fixed no matter how many dim and number of
rules. So the easiest and the most efficient way to catch the computation behavior is to profile
the timing information of an FNN with a small bench which has small dim and little number
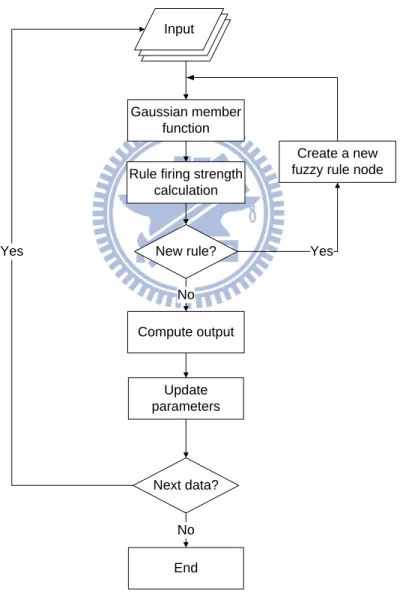
of rules. Fig. 8 shows the flow chart of the SONFIN, and we found two bottlenecks, the
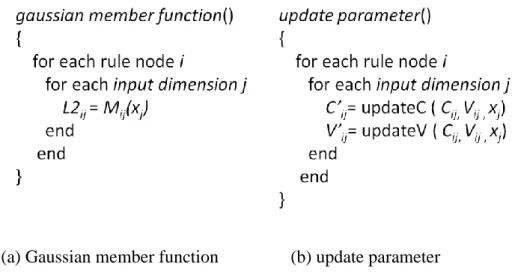
gaussian member function and the update parameter, by bottleneck analysis. And their pseudo
code is shown in Fig. 9. Through our profiler, the gaussian member function takes about 80%
and the update parameter takes about 15% of the total runtime.
Input Gaussian member function New rule? Update parameters Next data? Rule firing strength
calculation
Compute output
Create a new fuzzy rule node
No End
Yes Yes No
20
3.2
GPGPU Partitioning
Using the result of bottleneck analysis, we can have a initial partitioning. The gaussian
member function and the update parameter have been recognized as the two bottlenecks that
should be parallelized as CUDA kernels on GPGPU. However, in addition to the execution
time of individual function block, the partitioning of GPGPU and CPU should also consider
issues such as the effectiveness of parallel part of a program and data transfer between a
device and a host. However, we perform the partitioning based on the rule of thumb. Besides
the two bottlenecks of the SONFIN, the rule firing strength calculation is also moved to the
GPGPU in our partitioning. This is because the amount of data transfer between Gaussian
member function and rule firing strength calculation is larger than the amount of data transfer
between rule firing strength calculation and new rule decision. Based on the above analysis,
the final partitioning is shown in Fig. 10. The following subchapter will use this partitioning
scheme to perform optimizations in the ATM methodology.
(a) Gaussian member function (b) update parameter
21 Input Gaussian member function New rule? Update parameters Next data? Rule firing strength
calculation
Data transfer
Compute output
Create a new fuzzy rule node
No End Yes Data transfer Yes No Initialization Data transfer Initialization GPGPU CPU
22
3.3
Fine-Grain Task Decomposition
The first stage of the ATM is decomposition. It defines how the computations executed
simultaneously on the GPGPUs. Recall that the pseudo codes of the two bottlenecks are
shown in Fig. 9, and it can be seen that they have two nested for loop. So in each CUDA
kernel, we use a 2-D matrix, Task Matrix (TM), to represent the overall computation. The
definition of TM is:
Definition 1 (Task Matrix) A Task Matrix is a 2-D matrix which is used to stand for the
overall computation of a CUDA kernel. It is a matrix, where r is total number of rules and dim is total number of input attributes. And each element in a TM is named Task which is defined in the definition 2.
Definition 2 (Task) A task is a computation of one input dimension of one rule. Therefore, Tij is the computation of rule and input attribute pair (i, j). For example, T23 is the computation of the 2th rule to the 3th input attribute.
We decompose the parallelism of each CUDA kernel in the most fine-grained way by
defining the TM and the Tasks. The reason is that the fine-grained decomposition extends the
23
space of configuration of each CUDA kernel. We later use the task coarsening to search the
configuration space of each CUDA kernel. So the configuration with better performance can
be easily found. The searching procedure will be discussed in the section3.5. For the parallel
SONFIN, Fig. 11 shows an example of Task Matrix with 3 dim and 3 rules, and the Task
Matrix is a 3x3 Matrix.
3.4
Special Function Transformation & Memory Coalescing
The second stage of the ATM contains two optimizations, special functions
transformation, and memory coalescing. Because these two optimizations are independent,
they are designed in the same stage, and can be performed simultaneously. The purpose of
special function transformation is to utilize the special function hardware which is faster than
the compiled ptx code to speed up the mathematical operations. The special functions
transformation uses the library supported by CUDA, such as addition, subtraction,
multiplication, division and other mathematical operations. The special functions units are
faster than the standard functions because the special functions directly use the special
function units on the GPGPU. However, the number of special function units on the GPGPU
is limited, so the number of special functions which are changed from standard functions is
limited. This problem is like an simple version bin packing problem, so we can use the first fit
algorithm which is a straightforward approach to select the most effective special function
transformation.
Memory subsystem had been always identified as a crucial bottleneck in the GPGPU
computing. There is an optimization of memory access which is called coalesced memory
coalesced access. The coalesced memory access is a technique to combine multiple data
accesses into one single memory transaction. In an SIMT architecture, the memory access
24
memory transaction. As an example shown in Fig. 12 (a), assume the data which are needed
by the half warp is scattered to memory, so there require total sixteen memory accesses. Fig.
12 (b) illustrates the case that the data needed by the half warp is stored adjacently in the
memory, so all the memory access will be packed into only one memory transaction.
According to the regular data structure of FNN, the memory coalescing can be done by (a) non-coalesced memory access
(b) coalesced memory access
Fig. 12. Coalesced memory access. (a) non-coalesced memory access. (b) coalesced memory
access.
25
designing the data layout. Generally there are two styles of data layout which are used in
regular data, row-wise and column-wise. According to the introduction of memory coalescing
before, as long as the data of adjacent threads are stored in the adjacent memory address, the
memory access is optimized by memory coalescing. However, the number of rules will
change during the learning, so the data layout is limited by the direction of dim. Fig. 13 shows
our data layout of the parallel SONFIN.
3.5
Task Coarsening
The third stage of the ATM is task coarsening. The coarsening is an optimization
technique to fine-tune the parallelism decomposition. Fig. 14 shows the concept of task
coarsening. A single block represents a computation; a task is composed of three common
computations and one unique computation. There are four tasks which are executed
simultaneously, and the amount of total computations is after three time
26
stamps. If we coarsen two tasks into one task, the common computations are just executed
once and stored into registers. So a task becomes a task’ which is consist of three common computations and two unique computations. Therefore, the amount of total computations is
reduced to after the task coarsening. Moreover, because the number of common computations is decreased, so the memory accesses in the common computations are
also decreased. However, there are some overheads to perform task coarsening: the indexing
will cost extra computation in our last stage, task to thread binding.
In summary, there are two benefits of the task coarsening, 1) reduce the total amount of
computation 2) reduce the data access from memory. However, in the task coarsening
optimization we have to decide which tasks should be coarsened together and how many tasks
should be coarsened so that we can strike a balance between parallelism and amount of
computation. We define two schemes to coarsen tasks, column-based coarsening and
row-based coarsening. The row-row-based coarsening coarsens tasks within a rule and the column-based coarsening coarsens tasks in different rules. Fig. 15 (a) shows the column-column-based coarsening. To maintain the memory coalescing, the stripe width should be the number of
thread in a warp. Fig. 15 (b) shows the row-based coarsening. The Task Matrix is transformed
into Task Matrix’ after the task coarsening. We can use one of these two schemes to do the
task coarsening.
TM’= coarsen_column( TM, n)
TM’: Task’i,j = Taski,j ∪ Taski,j+w ∪ Taski,j+2w ∪ …∪ Taski,j+nw , nw < dim
TM’= coarsen_row( TM, n)
TM’: Task’i,j = Taski,j ∪ Taski+p,j ∪ Taski+2p,j ∪ …∪ Taski+np,j , p =
Where n is the coarsen number, and w is the coarsen width. And there is a property to
27
Property: While determining the n, the parallelism should be considered. Therefore, we
assume the hardware on GPGPUs is fully utilized if each core has at least one tasks to execute, that is, , where dim is the total number of input attributes and r is the
number of rules.
(a) column-based coarsening
(b) row-based coarsening
Fig. 15. Two schemes of task coarsening. (a) column-based coarsening. (b) row-based
28
We can know the upper bound of n by the property above, and then we extract each
CUDA kernel in the SONFIN to find the optimal configuration of task coarsening by the
coarsen configuration search which is shown below. The Confcoar is a configuration pair
{ coarsen scheme, coarsen number }, and it decides which coarsen scheme should be used and
how many tasks should be coarsened. The evaluation( C( TM, i ) ) function returns the CUDA
kernel time of a CUDA kernel using the coarsen scheme C with i coarsened tasks. The
coarsen configuration search scans the design space for the two coarsen schemes and for the
reasonable coarsen number, and choices the best one. Then we use the returned coarsen
scheme and coarsen number to perform the tasks coarsening.
Coarsening Configuration Search(Confcoar, TM, n)
1. Confcoar ←
2. best ←
3. for 0<i<n
4. for C←{ coarsen_raw, coarsen_column }
5. if( evaluation( C( TM, i ) ) < best)
6. best ← evaluation( C( TM, i ) )
7. Confcoar ← (C, i)
8. end if
9. end for
10. end for
29
3.6
Task to Thread Binding
The last stage of the ATM is task to thread binding. It creates the connection between the
tasks and the CUDA thread hierarchy. We use a matrix, Thread Hierarchy (TH), to stand for
the thread hierarchy in the CUDA. TH is a matrix, which Nb is the number of thread
block and Nt is the size of a thread blocks. There are three hints to follow to have a good task
to thread binding: First, define the TH with Nt that can make occupancy 100%. There are
many choices of Nt that can make occupancy 100%, however, we chose the smallest one to
avoid the load balancing issue. Second, the task bound within the same block should be
adjacent to maintain memory coalescing. Third, easier computation of the indexing in each
CUDA kernel is better. Based on the three hints, Fig. 16 shows a simple example of our task
to thread mapping. Actually, the tasks to thread binding becomes very easy after the first three
stages of the ATM. We just need to design the Nt which can make occupancy 100%, then map
the TM’ to TH according to the data layout direction. In this way, the hardware on GPGPUs
can be utilized efficiently, and the memory accesses are coalesced; moreover, the
computations are simple to calculate the indexes.
After the ATM, each kernel has been optimized. And then we profile the parallel SONFIN
to get the timing information, which is shown in Fig. 17. We can see how many percentage of
each function block takes in Fig. 17. In the Fig. 10, the gaussian member function originally
takes 85% total runtime, but it takes 25% after parallelization. The update parameter takes
13%, but it takes 4.62% after parallelization. As a result, the original bottlenecks are
accelerated. However, there are three data transfer overhead, they takes 0.015%, 23% and
30
Fig. 16. TM’ to TH binding
31
Chapter 4
Experimental Results
4.1 Experimental Environment
In this thesis, all the experiments are conducted in a workstation with Intel Xeon CPU
E5640, 64 GB RAM. The experiments in section 4.1~4.3 and section 4.5 are evaluated with
the NVIDIA Tesla C2050. And the following four architectures are used in the section 4.4,
NVIDIA GeForce 9800 GT, Tesla C1060, Tesla C2050 and GeForce GTX 680. Note that the
parallelization does not change the original algorithm. Hence, the error rate should be the
32
(a) Kernel time of 32 dim and scaled number of rules
(b) Kernel time of 512 dim and scaled number of rules
(c) Kernel time of 1024 dim and scaled number of rules
Fig. 18. Kernel time comparison between each optimizations
0 10 20 30 40 50 32 128 224 320 416 512 608 704 800 896 992 CUD A k e rn e l t im e ( s) number of rules GPU-FNN C C+Binding 0 50 100 150 200 250 32 128 224 320 416 512 608 704 800 896 992 CU D A k er n el t im e (s) number of rules GPU-FNN C C+Binding 0 100 200 300 400 500 600 700 32 128 224 320 416 512 608 704 800 896 992 CUD A k e rn e l t im e ( s) number of rules GPU-FNN C C+Binding
33
4.2 Comparison Between Different Optimizations
This section discusses the effects of each optimization technique. In this section, we use
NVIDIA Tesla C2050 as the default architecture. And we directly set the dimension and
number of rules to get the kernel time in the experiments in section 4.2~4.4. All the kernel
time is extracted and accumulated to see impacts on each CUDA kernels of each optimization.
Fig. 18 compares the kernel time with fixed dim using two optimizations, task coarsening and
task to thread binding. The term C means task coarsening and the term Bind stand for task to
thread binding. Because the GPU-FNN has done the special function transformation and
memory coalescing, so we just compare these two optimizations.
Fig. 18(a) shows the 32 dim case. The task coarsening gains almost no benefit with any
number of rules. This is because the task coarsening decreases the parallelism. On the other
hand, the task to thread binding significantly decreases the kernel time when the number of
rules is larger than 224. When the number of rule goes to 992, task to thread binding gains up
to 45% performance improvement.
In the case of 512 and 1024 dim in Fig. 18(b)(c), the task coarsening gets about 15%
performance improvement when the number of rules is 992. Because the dim is large enough,
so the parallelism after task coarsening is still large enough for parallel computation. The task
to thread binding delivers a limited improvement in the 512 dim case, because the hardware
utilization rate of GPU-FNN and ours are approaching maximum. But in the case of 1024 dim,
the task to thread binding has up to 20% improvement when the number of rules is 992. The
main reason is because a thread block only supports up to 1024 threads in the CUDA
programming model. Then only one thread block can be issued on a SM, and occupancy of a
SM is 32/48 = 0.6667 by using the GPU-FNN. However, The occupancy is still 100% by
34
4.3 Discussion of Input Scalability
This section discusses the kernel behavior using training samples with different
characteristics. We first fix the dim of training samples and change the number of rules. Table
I shows the kernel time of 32, 512 and 1024 dim with varying number of rules, and Fig. 19
shows the bar charts. The occupancy are 0.1667, 1 and 0.6667 for these three cases
respectively. In the 32 dim case which is shown in Fig. 19(a), our approach cannot gain
benefit when the number of rules is smaller than 224. However, when the number of rules is
larger than 224, our approach starts to have advantage and the advantage is larger when the
number of rules increases. Fig. 19(b) shows the case of 512 dim, but the performance
improvement of our approach is not impressive. This is because the SM occupancy rate of
GPU-FNN is almost 100% in 192~768 dim, so there is no room for us to gain benefit.
Nevertheless, when the dim is fixed to 1024 which is shown in Fig. 19(c), the SM occupancy
rate of GPU-FNN is not 100%. Therefore, our approach can gain improvement from the
occupancy. If the dim is larger than 1024, the GPU-FNN cannot work because a thread block
can only support up to 1024 threads. Our approach can works normally by dynamically
35
36
(a) Kernel time of 32 dim and scaled number of rules
(b) Kernel time of 512 dim and scaled number of rules
(c) Kernel time of 1024 dim and scaled number of rules
Fig. 19. Kernel time comparison between GPU-FNN and our approach
0 10 20 30 40 32 128 224 320 416 512 608 704 800 896 992 CUD A k e rn e l t im e ( u s) number of rules GPU-FNN ours 0 50 100 150 200 250 32 128 224 320 416 512 608 704 800 896 992 CUD A k e rn e l t im e ( u s) number of rules GPU-FNN ours 0 100 200 300 400 500 600 700 32 128 224 320 416 512 608 704 800 896 992 CUD A k e rn e l t im e ( u s) number of rules GPU-FNN ours
37
Besides, we fix the number of rule with varying dim. Table II shows the kernel time of
256, 512, 768 and 1024 rules with varying dim, and Fig. 20 shows the timing charts. Note that
the GPU-FNN cannot work if the dim is larger than 1024. The speedup of our approach is
about 1.5X in these four cases when the dim is 1024. One can find that the kernel time of
GPU-FNN increases extremely when the dim is 768. Because a SM can issue two thread
blocks when the dim is 768. When the dim increased, only one thread block is issued on a SM.
Then the performance degrades because occupancy is decreased. This problem will happen
when 768 1024 in Tesla C2050. However, our approach does not have this issue. It can be seen that the trend of the kernel time of the four cases are similar. It is
reasonable to inference that the percentage of performance improvement is fixed no matter
38
39
(a) Kernel time trend of 256 rule
(b) Kernel time trend of 512 rules
(c) Kernel time trend of 768 rules
(c) Kernel time trend of 1024 rules
Fig. 20. Kernel time trend of different number of rules
0 50 100 150 200 32 96 160 224 288 352 416 480 544 608 672 736 800 864 928 992 CUD A k e rn e l t im e (u s) input dimension GPU-FNN ours 0 100 200 300 400 32 96 160 224 288 352 416 480 544 608 672 736 800 864 928 992 CUD A k e rn e l tim e (u s) input dimension GPU-FNN ours 0 100 200 300 400 500 32 96 160 224 288 352 416 480 544 608 672 736 800 864 928 992 CUD A k e rn e l t im e (u s) input dimension FNN-GPU our 0 200 400 600 800 32 96 160 224 288 352 416 480 544 608 672 736 800 864 928 992 CUD A k e rn e l tim e (u s) input dimension GPU-FNN ours
40
(a) Kernel time of 512 dim using Tesla C1060
(b) Kernel time of 512 dim using GeForce 9800 GT
(c) Kernel time of 512 dim using GeForce GTX 680
Fig. 21. Kernel time with three different architectures
0 100 200 300 400 500 600 700 32 128 224 320 416 512 608 704 800 896 992 CUD A k e rn e l t im e ( u s) rule number GPU-FNN our 0 1000 2000 3000 4000 32 128 224 320 416 512 608 704 800 896 992 CUD A k e rn e l t im e ( u s) rule number GPU-FNN our 0 50 100 150 32 128 224 320 416 512 608 704 800 896 992 C UDA ke rn e l t im e ( u s) number of rules GPU-FNN our
41
4.4 Discussion of Architecture Scalability
In this section, we discuss the architecture scalability of our approach using the other
three GPGPU architectures, NVIDIA GeForce 9800 GT, NVIDIA Tesla C1060 and NVIDIA
GeForce GTX680. Note that the GPU-FNN can only support up to 512 dim when using
NVIDIA GeForce 9800 GT and NVIDIA Tesla C1060. Therefore, we show the results of 512
dim which are shown in Fig. 21. Remind that we had experiment for kernel time of 512 dim
with changing number of rules in section4.2 using NVIDIA Tesla C2050, the reduction of
kernel time is up to 16 %. In Fig. 21, largest reduction of kernel time is 28%, 30% and 20%
for 9800GT, C1060 and GTX680 respectively.
To show the scalability of number of cores using our approach, Fig. 22 compares the
kernel time using different graphic cards with 512 dim test bench. Note that the sequence of
number of cores is: GTX680>C2050>C1060>9800GT. As in Fig. 22, it can be seen that the
performance can be further improved by using the GPGPU with more cores, that is saying,
our approach has scalability for number of cores which is the architectural trend in the future.
Fig. 22. Kernel time of our approach using four different architectures
1 10 100 1000 10000 32 128 224 320 416 512 608 704 800 896 992 CUD A k e rn e l t im e ( u s) number of rules 9800 GT C1060 C2050 GTX 680
42
4.5 Total Runtime
Table III shows the comparison of total runtime. In Table III (a), we use random uniform
generated benches, and we generate four benches with different dim. The 32, 256, 1024 and
2048 dim can be used to represent the low, medium, high and very high dim respectively. In
the cases of 32 and 1024 dim, our implementation reduce the total runtime up to 19% when
comparing with the GPU-FNN implementation. The main reason is that GP-FNN cannot
achieve a good hardware utilization of GPGPU in these two cases. But the ATM in our
approach can always control the hardware utilization in a very high level. However, the
performance improvement in the case of 256 dim is only 6%, because the hardware utilization
of GPU-FNN is also really high, so there is no room to gain benefit from the hardware
utilization. The 2048 dim is a special case. In this case, the GPU-FNN cannot handle the very
high dim. However, our approach still works normally, and has 443x speedup over CPU
implementation. Table III (b) shows real cases, and the improvement can be up to 11.96%
with isolet5 bench compared to GPU-FNN. We can notice that the improvements of total
runtime are smaller than the improvements of the kernel time experiments before. The main
reason is the number of rules is increasing from 0, and the parallelism is not large enough to
have massive improvement with small number of rules. As a result, the overall performance
43
Table III Total runtime
(a) Synthetic benches
44
Chapter 5
Conclusions & Future Works
In this thesis, we present a design flow for parallel FNNs on GPGPUs. In the design flow,
we propose the architecture-aware thread mapping (ATM) methodology to optimize each
CUDA kernel. The task decomposition and coarsening scheme scans the design space of a
parallel FNN. By considering different characteristics of FNNs and training samples, the
proposed scheme can find appropriate parallelism which can fully exploit the computing
capability of GPGPUs. Moreover, the task to thread binding maps the high level tasks to the
concurrent threads. This binding methodology concerns not only the architectural features of
GPGPUs, but also the characteristics of FNNs such as dim. The proposed binding
methodology from tasks to thread provides performance scalability with the increasing
number of cores of GPGPUs and changing dim and rules of FNNs.
Experimental results show that the kernel time can be reduced by 20%~40%, and the
reduction of total runtime is up to 20% compared with the GPU-FNN. Compared with the
CPU implementation, the total runtime speedup can be up to 460X. As a result, the proposed
ATM methodology makes it more practical to apply an FNN to solve different problems. And
45
References
[1] Y. Cai and H. K. Kwan, “A fuzzy neural classifier for pattern classification,” in Proc. Int. Symp.
Circuits Systems, Chicago, IL, May 3–6, pp. 2367–2370, 1993.
[2] J. S. Jang, “ANFIS: Adaptive-network-based fuzzy inference system,” IEEE Trans. Syst.,
Man, Cybern., vol. 23, no. 3, pp. 665–685, May 1993.
[3] C.F. Juang and C.T. Lin, “An on-line self-constructing neural fuzzy inference network and its
applications,” IEEE Trans. Fuzzy System, vol. 6, no. 1, February 1998.
[4] D. Kukolj and E. Levi, “Identification of complex systems based on neural and Takagi–
Sugeno fuzzy model,” IEEE Trans. Syst., Man, Cybern., B, Cybern., vol. 34, no. 1, pp. 272–282, February 2004.
[5] N. K. Kasabov and Q. Song, “DENFIS: Dynamic evolving neural-fuzzy inference system
and its application for time-series prediction,” IEEE Trans. Fuzzy Syst., vol. 10, no. 2, pp.
144–154, April 2002.
[6] P.P. Angelov and D. P. Filev, “An approach to online identification of Takagi–Sugeno
fuzzy models,” IEEE Trans. Syst., Man Cybern., B, Cybern., vol. 34, no. 1, pp. 484–498, February 2004.
[7] P. P. Angelov and D. P. Filev, “Simpl_eTS: A simplified method for learning evolving
Takagi–Sugeno fuzzy models,” in Proc. Int. Conf. Fuzzy Syst., pp. 1068–1072 , 2005.
[8] H. J. Rong, N. Sundararajan, G. B. Huang, and P. Saratchandran, “Sequential adaptive
fuzzy inference system (SAFIS) for nonlinear system identification and prediction,” Fuzzy
Sets Syst., vol. 157, no. 9, pp. 1260–1275, 2006.
[9] P. Angelov and X. Zhou, “Evolving fuzzy systems from data streams in real-time,” in
Proc. Symp. Evolving Fuzzy Syst., pp. 29–35, 2006.
46
with on-line structure and parameter learning,” IEEE Trans Fuzzy Syst., vol. 16, no. 6, pp.
1411–1424, December 2008.
[11] J. D. Rubio, “SOFMLS: Online self-organizing fuzzy modified leastsquares network,”
IEEE Trans. Fuzzy Syst., vol. 17, no. 6, pp. 1296–1309, December 2009.
[12] J. A. M. HernandezmF.G. Castaneda and J. A. M. Cadenas, “An evolving fuzzy neural
network based on the mapping of similarities,” IEEE Trans Fuzzy Syst., vol. 17, no. 6, pp. 1379–1396, December. 2009.
[13] J. J. Rubio and J. Pacheco, “A stable online clustering fuzzy neural network for nonlinear systems identification,” Neural Comput. Appl., vol. 18, no. 6, pp. 633–641,
2009.
[14] J. A. Iglesias, P. Angelov, A. Ledezma, and A. Sanchis, “Evolving classification of agents’ behavior: A general approach,” Evolving Syst., vol. 1, no. 3, pp. 161–171, 2010. [15] J. J. Rubio, D. M. V´azquez, and J. Pacheco, “Backpropagation to train an evolving
radial basis function neural network,” Evolving Syst., vol. 1, no. 3, pp. 173–180, 2010. [16] J. J. Rubio Avila, “Stability analysis for an online evolving neuro-fuzzy recurrent
neural network,” in Evolving Intelligent Systems: Methodology and Applications, P. Angelov, D. P. Filev, and N. Kasabov, Eds. New York: Wiley-IEEE Press, ch. 8, pp. 173–
198, 2010.
[17] C.F. Juang and T.C. Chen, “Speedup of implementation fuzzy neural networks with high-dimensional inputs through parallel processing on graphic processing units,” IEEE Trans.
Fuzzy System, vol. 19,no. 4, August 2011.
[18] NVIDIA. “NVIDIA ‘s next generation CUDA compute architecture: Fermi,” Available: http://www.nvidia.com.tw/content/PDF/fermi_white_papers/NVIDIA_Fermi_Compute_A
rchitecture_Whitepaper.pdf
47
http://www.nvidia.com/object/cuda_home_new.html
[20] NVIDIA. “CUDA C Programming Guide,” Available: http://developer.nvidia.com/nvidia-gpu-computing-documentation
[21] NVIDIA. “CUDA C best practices guide,” Available: http://developer.nvidia.com/nvidia-gpu-computing-documentation
[22] K.S Kyong and K. Jung. “GPU implementation of neural network”, Pattern
Recognition, Vol. 37, Issue 6, pp. 1311-1314, 2004.
[23] X. Sierra-Canto,F. Madera-Ramirez and V. “Parallel training of a back-propagation
neural network using CUDA,” Proceedings - 9th International Conference on Machine Learning and Applications, ICMLA 2010, pp 307-312, 2010.
[24] Mart´ınez-Zarzuela, M., D´ıaz Pernas, F., D´ıez Higuera, J., Ant´on Rodr´ıguez, M. “Fuzzy ART neural network parallel computing on the gpu,” Sandoval, F. (ed.) IWANN 2007. LNCS, vol. 4507, pp. 463–470. Springer, Heidelberg, 2007.
[25] Machine Learning data set: “Artificial characters” Available:
http://archive.ics.uci.edu/ml/datasets/Artificial+Characters
[26] Machine Learning data set “p53 mutants” Available: