國
立
交
通
大
學
資訊科學與工程研究所
碩
士
論
文
雙 核 心 嵌 入 式 系 統 之 即 時 線 上 排 程 方 法
Real-time on-line Task scheduling for dual-core
embedded systems
研 究 生:鄭家明
指導教授:張立平 教授
雙核心嵌入式系統之即時線上排程方法
Real-time on-line Task scheduling for dual-core embedded
systems
研 究 生:鄭家明 Student:Chia-Ming Cheng
指導教授:張立平 Advisor:Li-Pin Chang
國 立 交 通 大 學
資 訊 科 學 與 工 程 研 究 所
碩 士 論 文
A ThesisSubmitted to Institute of Computer Science and Engineering College of Computer Science
National Chiao Tung University in partial Fulfillment of the Requirements
for the Degree of Master
in
Computer Science
August 2008
Hsinchu, Taiwan, Republic of China
雙核心嵌入式系統之即時線上排程方法
學生:鄭家明 指導教授:張立平
國立交通大學資訊科學與工程研究所碩士班
摘要
為了解決效能及能耗的問題,很多嵌入式系統產品採用 dual core 或是 multi-core 的架構,在這些架構中,常加入 DSP 來滿足日益漸增的多媒體需求。 DSP 因為要處理大量的數學計算,所以 register 數量大,pipeline stage 深, 造成 context switch overhead 很大,因此 DSP 在排程行為上屬於Non-preemptive。此外,一個 DSP 會有多個 Task 在上面執行,容易發生 Resource Contention,加上每一個 Task 需要在不同的 core 之間切換,按照一定的順序 在不同的 core 執行不同類型的工作 (precedence constraint),所以在這樣具 有 heterogeneous core 的平台在設計上會有以下的 challenges: (1) 如何在滿 足 precedence constraint 的條件下,降低 Task 在 DSP 的 response delay, 避免 Task miss deadline (2)如何 on-line 判斷一組 Task set 的可排程性,決 定是否 accept 或是 reject 一個 on-line task。在本篇論文,我們的目標是解 決上述的兩項問題:我們提出在 DSP 加入 Preemption Point 的方法,降低 Task 的 response delay 以及提昇系統的可排程性。此外,我們也設計在
microprocessor( MPU and DSP )的排程方法,並提出 admission control 方法 檢查 Task set 可排程與否。
關鍵字:即時系統(Real-Time),線上排程(on-line scheduling),嵌入式系統 (Embedded System)
誌 謝
到了寫誌謝這篇內容的時間點,代表兩年的研究生活即將告一段落,
人生將要在另一個不同的領域啟航。兩年過去了,回想在碩一時熬夜
準備期中、期末考並同時在一個禮拜中還要趕三份 project,當時的
情景好像還是昨天的事一般;碩二開始,從訂定論文題目、建立實驗
平台、提出理論、設計實驗、產生數據、口試,這段期間遭遇了許多
困難與挫折,著實考驗並磨練我面對挫折的勇氣與解決問題的能力。
在這兩年中,要感謝的人實在太多,首先要感謝張立平教授的指導,
使我學到不少和嵌入式系統有關的知識以及做研究的態度,沒有張教
授的指導,本篇論文將無法完整與嚴謹。還要感謝林松德、黃千庭、
許辰暉、許蕙茹同學,可以和你們在 ESSLAB 一起奮鬥努力是我的榮
幸。也要感謝學弟妹,黃士庭、蘇宥全、黃明毅、郭郡杰、廖秀芬,
實驗室有你們的加入更是增添笑聲與歡欣。
感謝口試委員楊家玲教授、謝仁偉教授、陳雅淑教授不辭辛勞且細心
審閱並提供寶貴的建議,使我的論文更臻完善,在此由衷的感謝。
感謝我的父母在背後默默的支持與鼓勵,更要感謝我的未婚妻在這兩
年的支持與體諒。
僅以此文獻給我摯愛的雙親及未婚妻。
目 錄
中文摘要
………
i
誌謝
………
ii
目錄
………
iii
表目錄
………
iv
圖目錄
………
v
一、
Introduction………
1
二、
Problem definition………
2
2.1
Architecture and System………
2
2.2
MPU/DSP Task characteristics………
3
2.3
Problem Definition………
4
三、
Method
………
5
3.1
Over View………
5
3.2
MPU scheduling………
6
3.3
DSP scheduling………
7
3.4
MPU and DSP precedence constraint………
10
3.5
Task density, deadline and Example………
12
四、
Experiment Results
………
15
4.1
Experiment Setting and Performance Metrics………
15
4.2
Experiment Result………
17
五、
Conclusion
………
23
六、
References
………
23
表目錄
1.
A normal case example………...12
2.
worst case example………..14
3.
The clock cycles of each step in JPEG encoding………...24
圖目錄
1. System Architecture……….3
2. The flow for MPU and DSP subtasks of a single Task………4
3. Terminologies………..4
4. System overview………..6
5. MPU scheduling………..6
6. Executing flow for MPU subtasks of a task………7
7. A task set not with preemption point………...8
8. A task set with preemption point……….9
9. Local deadline of MPU and DSP subtasks………10
10. Precedence constraint for a single task………..11
11. Bounded response for a DSP subtask………12
12. An example for setting local deadline………...14
13. Worst case of the example……….15
14. System Architecture………...15
15. DSP subtask RDC AVG-same CUS server size……….18
16. DSP subtask RDC AVG-decreasing CUS server size………....18
17. DSP subtask RDC AVG-increasing CUS server size………19
18. DSP subtask RDC STD - same CUS server size………...19
19. DSP subtask RDC STD - decreasing CUS server size………..19
20. DSP subtask RDC STD - increasing CUS server size………...20
21. MPU subtask RDC AVG - same CUS server size……….20
22. MPU subtask RDC AVG - decreasing CUS server size………20
23. MPU subtask RDC AVG - increasing CUS server size……….21
24. MPU subtask RDC STD – same CUS server size……….21
25. MPU subtask RDC STD – decreasing CUS server size………21
Section 1 Introduction
近年來許多數位多媒體產品,例如攜帶式多媒體裝置(PMP)、智慧手機、電
視手機及行動電視相繼問世,手機也加入MP3、PDA、GPS 導航系統等功能,
所以這些產品本身需要更強大的壓縮、解壓縮、或是編碼、解碼的能力來滿足多 媒體功能(multi-media)上的需求,DSP( Digital Signal Processing)便扮演重要的 角色。DSP 是一種 instruction set 和硬體經過特別設計的 microprocessor,這種
特製化的處理器著重於數學運算及訊號處理這類需求的效能表現。DSP 需要滿足
兩項基本要求:一、善於處理數學運算,可以在每秒鐘完成數百萬次加法及乘法
運算,此外,DSP 必需要能夠處理一些特別的演算法,例如 Convolution、Discrete
Fourier Transform、Discrete Cosine Transform。二、DSP 必需要能夠符合即時性 (Real-time)的要求,在每個工作的 deadline 到達之前完成該項工作[2]。 MPU(micro processor unit)通常不具備浮點運算單元,由單一晶片構成,主要負責
運算、感測、監控的工作,例如在遙控器裡頭的MPU 負責感應使用者的操作,
將按鈕訊號轉成紅外線發送給電視或是錄放影機。
由於廢熱以及能源消耗的因素,在single processor architecture 上,
performance 的提昇已經遭遇瓶頸,加上 multi-media application 隸屬於
computation-intensive application,在 single processor 上執行容易遭受 CPU 使用 率的瓶頸(utilization bottleneck),使得只有少量的 application 可以同時存在 CPU,等待執行 。 multi-core processor architecture,這種在單一晶片上包含多 顆處理器的系統架構,可以將每顆處理器的時脈(clock rate)降低,利用多顆處 理器來增加效能並降低能源的消耗[1],這種架構因此愈來愈受到注意及採用。
因此將MPU 和 DSP 結合,產生的 dual-core architecture,除了可以滿足日益漸增
的多媒體運算需求,更可以提昇整體效能。MPU 在這個架構中擔任 Dispatcher 的角色,負責管控系統的運作,DSP 扮演著 worker 的角色,負責做數位訊號處 理。
然而,在這個dual-core(MPU+DSP)架構底下,有以下的問題:一、MPU
和DSP 之間有一個執行先後的順序限制(precedence constraint),也就是 MPU
和DSP 排程不是 independent, 例如一個工作需要不斷在 MPU 和 DSP 之間做切
換,MPU 操作完才交給 DSP 去處理,MPU 這端還沒處理完,DSP 不能開始處
理,只能等待MPU 完成,這樣會損害 MPU 和 DSP 的可排程性(schedulability),
也會降低MPU 和 DSP 的使用率(utilization)。二、MPU 的排程具有可插斷的
性質(preemptible),也就是一個low priority job 執行到一半可能要讓出 MPU 給
high priority job;但是由於 DSP 附屬的 register 個數較多,pipeline stage 較深,
因此DSP 的 context switch overhead 很大,所以 DSP 通常屬於 non-preemptible,
和可排程性。三、MPU 和 DSP 所要執行的工作大多屬於 on-line task,無法預先
得知和task 有關的一些屬性,例如 arriving time, computation time 及 deadline,所
以需要使用on-line scheduling algorithm 來處理 MPU 和 DSP 的排程。
針對上述問題,本篇論文提出一個針對dual core 的 on-line scheduling algorithm
以及一個admission control policy。在 on-line scheduling algorithm 方面,在 maintain
MPU 和 DSP 的 precedence constraint 的條件下,我們希望能解決因為 DSP non-preemptible 這個屬性所造成的問題,像是 long blocking time,以及 low DSP utilization 這些問題, 所以我們在 DSP non-preemptible portion 加入 preemption point。在 preemption point,low priority job 會將 DSP 使用權交給 high priority job,
達到協同式多工(Co-operative),除了可以降低high priority job 的 response time,
增加DSP 的 utilization,也可以讓 scheduler accept 較多的 task。此外我們在 DSP
上利用Bandwidth server[3]來確保每個 DSP subtask 的 response,不讓特定的 DSP
subtask 一直佔住 DSP,使得其他的 job 一直處於等待 DSP 的情況。admission control policy 主要是用來檢測 MPU 和 DSP 之間工作的切換是否存在一個 feasible schedule,也就是存在一個排程方式使得所有工作都可以在 deadline 之前完成。 當一項新進的工作(newly-arrived task)抵達,scheduler 會得知關於這個工作的 computation time,和 deadline,並判斷加入這項工作是否存在 feasible schedule,
如果存在就接受,反之,拒絕這項工作,這個判斷的過程是在on-line 進行,所
以判斷需要非常的迅速,因此判斷的機制不能太複雜,我們將於後面的章節討論
判斷的方法。feasible schedule 是否存在取決於 deadline,DSP preemption point 的
設定,還有bandwidth server size 的設定,在本篇論文將對這些屬性進行討論,
並藉由實驗數據來進行比較。
Section 2 Problem definition
2.1
Architecture and System
在我們的Dual-core 實驗平台有一顆 ARM MPU(926EJ-S)[4] 以及一顆工研
院所研發的DSP (PAC DSP),MPU 和 DSP 有一塊 shared memory,可以讓 MPU
及DSP 這兩顆 processor 的資料共享(sharing)以及同步(simultaneous)。兩顆
processor 之間的溝通是利用 mail box 來進行訊息、命令以及資料的傳遞。Task flow 的流程如下:一個 task 會先進入 MPU 執行一段時間,當 MPU 處理完後,
這個task 接著要進入 DSP 進行操作,於是 MPU 會將 DSP 需要用到的一些參數
(i.e. computation time, deadline)放到 mailbox 裡頭,接著發送一個 Interrupt 給 DSP 通知 DSP 去處理,DSP 收到 Interrupt 之後就會開始處理這項工作;DSP 處
DSP 已經完成所要求的工作。
2.2 MPU/DSP Task characteristics
MPU 通常用來負責 general purpose 工作,例如系統的監控及管理,在我們的 實驗平台中,MPU 擔任 Dispatcher 的角色,用來接收工作,並指派工作給 DSP
處理。所以MPU task 不會涉及複雜的運算,因此執行時間(computation time)
不會很長。此外,為了滿足即時性(Real-Time)的要求,每個工作會根據他的
重要性、急迫性給予不同的Priority。當一個 low priority job 執行到一半,有一個
high priority job 抵達,這個 high priority job 可以將正在執行的 low priority job preempt,讓 priority 較高的 job 優先處理。
DSP 通常用來負責對數位訊號進行處理,像是 Convolution、Discrete Fourier Transform、Discrete Cosine Transform、noise cancellation。這些和訊號處理有關
的演算法,在執行過程涉及到大量的加法、乘法運算,所以DSP task 需要比較
長的執行時間(computation demanding)及較多的記憶體空間(High memory bandwidth),例如 FIR filter,在數學上的表示法為∑xh,x 是 input data vector, h 是 filter coefficient,FIR filter 需要進行大量的加法及乘法,也需要記憶體來儲
存輸入資料向量和filter coefficient。加上 DSP 需要處理 streaming data,必須滿
足即時性的要求。因此DSP 在硬體設計方面,為了提昇整體效能,附屬較多的
register, pipeline stage 也較深 [4],造成 DSP 的 context switch overhead 很大,
如同Fig.2 所示,在我們的實驗平台中,MPU task 和 DSP task 是交錯地執
行,也就是DSP 必須等待 MPU task 完成後才能開始執行, 而 MPU task 完成
後,也必須等待 DSP task 執行完成後才能繼續執行。
2.3 Problem Definition
接下來我們要來定義一些在本篇論文會用到的term,以及要解決的問題。一
個task flow τ 就是一連串需要被完成的工作,這些工作我們稱作 subtask,例如在
Fig.2 這個 task flow 就是 τ1,1->τ1,2->τ1,3->τ1,4,為了簡要,我們把task flow 簡稱
為 task。 Task τi 的task release time 就是 τi進入系統的時間,我們把它表示為
R(τi)。 Taskτi 的Starting time 就是該 task 開始執行第一個 subtask 的時間點。
Task τi 的Response time,簡稱為 Resp (τi),就是從 τi release 的時間到 τi完成的這
一段時間差。Task τi 的Global Deadline,簡稱為 GD(τi),是 τi在一個週期中,可
被允許的最大response time,在我們的 task model,Global Deadline 就是每一個
period 的結束點。
我們把要執行的工作以τ1、τ2 …來表示,每一個工作 τi都有ni個subtask,屬
於τi的每一個subtask,我們以 τi,j來表示,且1≦j≦ni。每個subtask 都有它所需
要的執行時間,我們以ei,j來表示。在本篇論文中,τi所有的subtask τi,j存在有
成前是不能開始執行,我們以τi,j τi,k來表示τi,j和τi,k存在有Precedence
Constraint。在本篇論文中,一個 task 會有 MPU subtask 及 DSP subtask,分別在 MPU 及 DSP 執行,而且是交錯地執行(如 Fig. 3),所以當 j 是奇數(例如, τi,1 ,τi,3 ,τi,5….)τi,j就是MPU subtask,當 j 是偶數(例如,τi,2 ,τi,4 ,τi,6….),τi,j
就是DSP subtask。
一個task set,簡稱為 T,是由一些 task 所組成的集合,例如 T={τ1 ,τ2 ,…,τM }
代表一個由M 個 task 所組合成的 task set。當一個 subtask 要去 request 一個
processing unit(MPU or DSP),可是這個 processing unit,正被另一個 subtask 所佔
住,這種情形就稱為Resource Contention,如果兩個 Task 的所有 subtask,都不
會有Resource contention,那這兩個 task 具有 Contention-free 的關係。
如同在Introduction 所述,我們希望能解決由於 DSP 是 non-preemptible 所造
成的問題,例如low DSP utilization,long response time 。在我們的實驗平台上
有以下這些限制:一、所有task 需要滿足 Precedence Constraint,二、在排程行
為上,MPU 是 fully preemptive 而 DSP 卻是 non-preemptive。在這樣的限制下,
我們需要找到一個feasible schedule,使得所有 task 可以在 deadline 之前完成工作
並盡量降低每個task 的 response time,也希望增加 DSP utilization。這個問題的
定義如下:
Definition : 關
於一個Task set T={τ1 ,τ2 ,…,τM },這個問題就是找到一個 feasible schedule,使
得∀τi ∈ T, [ R(τi) + Resp(τi) ] < GD(τi)。
Section 3 Method
3.1 Over View
在我們的實驗平台 (後面開始簡稱為:系統) 上有兩個非對稱性的 core,一
個是fully preemptive 的 MPU,另一個是 non-preemptive 的 DSP。 如 Fig. 4 所示,
當一個on-line task 抵達系統,必須先進行 admission control test,根據該 task 的
computation time 以及 deadline 判斷是否存在一個 feasible schedule,使得在系統
內部的所有task 可以在 deadline 之前完成。如果存在有一個 feasible schedule,這
個newly arrived task 將被接受,反之該 task 會被 reject。
在我們的實驗設計上,一個task 具有多個 subtask,subtask 主要分成兩種,
DSP 上執行,這兩種 subtask 在排程上具有相依性,也就是 precedence constraint :
在一個task 的執行順序上,MPU subtask 執行完換 DSP subtask 執行,DSP subtask
執行完,MPU subtask 接著執行,執行的順序是固定的,MPU subtask 尚未執行
完DSP subtask 不能開始執行,反之亦然。
在MPU 上的 subtask 的排程是採用 preemptable scheduling ,讓 priority 高的
MPU subtask 優先執行。當一個 MPU subtask 完成後,接著就會有一個 DSP subtask
進入DSP 等待執行,由於系統無法預先得知這個 DSP subtask 何時會進入 DSP,
所以我們在DSP 上使用 Bandwidth server 為每一個 task 保留一部分的 DSP 執
行時間來guarantee 一個 DSP subtask 最遲可以完成的時間,當 DSP subtask 執行
完畢,下一個MPU subtask 就可以繼續開始執行。
3.2 MPU scheduling
在我們的Task model 底下,task 是屬於 periodic,每一個 Task 都有一個固定
的週期大小,在一個週期之中,每個task 裡頭會有一部份工作在 MPU 上處理,
另一部份在DSP 上執行,而且需要交錯的處理,在 MPU 上處理的工作屬於
Preemptible,我們稱之為 MPU subtask,而 DSP 上的工作屬於 Non-Preemptible,
我們稱之為DSP subtask。當一個 Task τi 在MPU 執行完部份工作,會 issue 在
DSP 上面的工作 ( DSP subtask ),所以 τi在MPU 會 suspend,等待 DSP subtask
完成後再Resume。如 Fig 5.所示,τ1在MPU 完成 τ1,1這個工作後,會Suspend
等待DSP job 完成後才 Resume,繼續執行在 MPU 上的工作。
通常Periodic scheduling algorithm 針對 Task 執行到一半會發生 Suspension
的處理方法是把Task τi從發生Suspension 到 Resume 的這一段時間視為 τi的
Blocking time。不過這種方法不適用於我們的 Task model,有以下兩個原因:一、
MPU 而不是 τi不能使用MPU,如果把這段時間計為 τi的Blocking time 將會過
於保守。二、Suspension 到 Resume 的這一段時間基本上是決定在於 DSP 的排程,
而不是取決於MPU 上排程,τi 什麼時候可以Resume 我們無法預先得知,我們
只能知道最晚什麼時候可以Resume,這個我們會在後面的章節討論。因此在
MPU 上執行的行為將會如 Fig 6.所示,每一個 MPU subtask 之間會有一個 Separation, MPU subtask 的樣貌會呈現一段一段,彼此不會交疊在一起。這個 Separation 具有一個最大值,我們將在後面進行討論。
因為上述的理由,MPU 的排程我們採用 EDF(Earliest Deadline First)來進 行排程:
Theorem
A periodic system and a collection of sporadic tasks are schedulable by EDF if the sum of utilization of the former and instantaneous utilization of the latter is no greater than 1 at any time.
這個theorem apply 的困難在於每個時間點都必須要去做 total CPU utilization
的檢查。但是在MPU 排程採用 EDF 可行的原因在於,對於所有的 Task,只要
我們為每一個Task τi assign 一個 density ( Di ),Di 代表 τi在MPU 可以被保證
使用時間的比例。我們會為每一個MPU subtask assign 一個 deadline,deadline
assign 的方法基本上會依照該 MPU subtask 所屬 Task 的 density 去訂定,我們
在後面的章節會詳細說明如何assign deadline。如 Fig. 6 所示,因為每一個 Task
所有的MPU subtask 都不會交疊,代表在任何時間點,Task τi最多會使用MPU 時
間的比例為該task 的 density Di,我們只需要去檢查所有 Task 的 density 總和是
否小於或是等於1,就可以確定是否存在一個 feasible schedule,上述的 theorem
依然可用。因此,MPU Admission Control 的 policy 如下: Admission Control on MPU
if ΣDi <=1, => exist feasible schedule
當一個MPU subtask 完成後,接續在這個 subtask 後面的 DSP subtask 會開始
在DSP 等待執行。因為所有 DSP subtask 必須等待 MPU subtask 完成後才可以開
始執行,DSP subtask 進入 DSP 的時間將無法預期,而且這些 DSP subtask 的 inter-arrival time 無法預先得知(non-deterministic),所以可以將 DSP subtask 視為 sporadic task。通常在 sporadic task 的排程方法都是採用 Bandwidth server 來保留
一段CPU 執行時間給每一個 task,確保每個 task 可以在一定的時間內完成。因
此我們在DSP 的排程採用 CUS ( Constant Utilization Servers ) 搭配 EDF 排程方
法,在DSP,每一個 Task 我們會 assign 一個專屬的 CUS server 來服務該 Task。
DSP 的排程屬於 non-preemptive,當一個 Task 進入 DSP 執行,必須等到該 Task 完成之後,其他的 Task 才能開始使用 DSP,加上一般而言,一個 Task 在 DSP 上執行所需要的時間相較在 MPU 上執行所需要的時間,需要比較長的執行
時間,所以一旦有一個Task lock 住 DSP 在 DSP 上執行,其他 Task 必須等待一
段相當長的時間,直到該Task 完成,所以效能比較差。以 Fig. 7 為例,τ2,2在t1
之前就已經arrive,不過卻必須等到 τ1,2在時間點t1 執行完畢後,才能開始執行,
造成在時間點t2,τ2,2就發生miss deadline 的情形。
為了解決這個問題,我們在DSP 排程行為上加入了 Preemption point,在
Preemption Point 的地方,scheduler 會去檢查是否存在 deadline 更小的 DSP subtask
存在,如果有的話就讓它在DSP 執行,如果沒有的話,原本在 DSP 上執行的
DSP subtask 就繼續執行,直到遇到下一個 preemption point 或是執行完畢,利用 這樣的方法,DSP 就可以達到 co-operative 的效果。在 preemption point 以外的 地方,DSP 的排程仍然是屬於 Non-preemptible,所以我們將兩個相鄰的
Preemption point 之間的時間差稱為 Maximum non-preemptible duration, MNPD,
這一段時間是一個DSP subtask 進入 DSP 最長會被 block 的時間。
以Fig.8 為例,在時間點 t1,DSP subtask τ1,2遇到了preemption point,會去檢
查是否有deadline 更小的 DSP subtask ready,結果是沒有,所以 τ1,2繼續執行直
到在時間點t2遇到第二個preemption point,這時候已經有一個 deadline 比 τ1,2更
小的DSP subtask τ2,2 ready,所以就讓 τ2,2先執行直到時間點t3,τ2,2完成,scheduler
會從已經ready 的 DSP subtask 選擇 deadline 最小的 subtask 在 DSP 上執行,在
(t2-t1)。
對於每個task,在 DSP 都有一個專用的 CUS server 來服務這個 task 的所有
DSP subtask,每一個 CUS server 都有一個 server size,代表該 CUS server 可以
被保證分配到DSP 執行時間的比例。我們將利用每一個 Task 的 CUS server
size,求出隸屬該 task 的 DSP subtask 的 deadline 做為 EDF 排程的依據。接著我
們要介紹CUS 的 replenish rule 並利用下列的方法,在一個 DSP subtask 抵達
DSP,算出該 subtask 的 deadline。其中 Ci 是 CUS server size,ei代表CUS server
的budget。我們將在後面說明如何設定每一個 CUS server 的 server size 以及這裡
求出來的deadline 所代表的意義:
Replenishment Rules of CUS server with size ci
R1: Initially, ei =0, and deadline=0.
R2: when a DSP subtaskτi,j arrive DSP,
(a) if current time < deadline, do nothing;
(b) if current time >= deadline, deadline =current time + ei,j /Ci, and ei= ei,j;
R3: At the deadline
(a) if the server is backlogged, set deadline = deadline + ei,j /Ci and ei= ei,j;
(b) if the server is idle, do nothing.
利用上述的方法算出的deadline,就可以使用 EDF 排程方法決定哪一個 DSP
subtask 應該先被執行,當一個正在執行 DSP 的 DSP subtask 抵達 preemption point
或是已經完成工作後,scheduler 會去檢查所有 ready DSP subtask 的 deadline,挑
選deadline 最小的 DSP subtask 在 DSP 上執行。此外,為了確保所有 task 都可以
在deadline 之前完成,所有 CUS server size 外加 Non-Preemption portion 所造成
的DSP utilization 的總和必需要小於 1,這也是我們在 DSP 上所做的 Admission
Control 的方法。
Admission Control on DSP
Step1: Find out the Min(ei,j /ci) i=1,2,3…Task#, j=1,2,3…Subtask #
3.4 MPU and DSP precedence constraint
在Section 3.2 曾經提過,在我們設計的 Task model 底下,所有 Task 都是
Periodic,每一個 Task 在一個 period 的 deadline 就是該 period 的結束點,我們將
這個deadline 稱為 Global Deadline。當一個 Task 第一次抵達 MPU 或是剛由 DSP
返回時,我們需要知道每一個MPU subtask 最晚什麼時候會 issue DSP subtask,
也就是該MPU subtask 最晚什麼時候會 suspend,所以我們需要為每一個 MPU
subtask assign 一個 deadline,這個 deadline 就是該 MPU subtask 最晚會 issue 一
個DSP subtask 的時間,我們可以用這個 deadline 做為該 MPU subtask 在 MPU 上
EDF 排程的依據,而非使用 Global Deadline。以 Fig.9 為例,Taskτ1會在時間點
t1 和 t3 開始在 MPU 上執行 MPU subtask τ1,1和τ1,3,我們分別將τ1,1和τ1,2的
deadline 設定在 t2 和 t4,這就代表 τ1,1和τ1,3最遲分別會在t2 和 t4 完成並 issue
DSP subtaskτ1,2和τ1,4。
為了要滿足我們在Section 3.2 所提出的 Admission Control 方法,加上每一
個Task 都有一個 density 值 Di,因此每一個 Task 所屬的所有 MPU subtask 在
MPU 的執行時間去除以該 MPU subtask 從 arrive 至 deadline 這一段時間所得到
的數值必須要和density, Di 相同,以 Fig. 9 為例,e1,1 / ( t2-t1)=D1, e1,3 /
(t5-t3)=D1。我們將以此觀念為基礎,在後面詳述如何設定每一個 subtask 的 deadline,以及如何設定每一個 Task 的 density 大小。
在Section 2 曾經提過,我們的 Task model 必須要滿足 Precedence Constraint
的需求:MPU subtask 和 DSP subtask 會交錯執行而且具有一個先後順序的關係。
如同Fig. 10 所示,Task 1 具有 τ1,1 , τ1,2 , τ1,3 , τ1,4 , τ1,5 這些 subtask,其中 τ1,1 , τ1,3 ,
τ1,5 屬於 MPU subtask,τ1,2 , τ1,4 ,屬於 DSP subtask,τ1,1換τ1,2執行,在τ1,1還沒執
行完之前τ1,2不能先行執行,τ1,3也必須等到完成後才能開始在MPU 執行,這就
當一個Task 的 MPU subtask ready 之後,就可以利用 EDF 排程方法決定優
先在MPU 執行的 subtask。當這個 subtask 執行完畢後,其所屬的 Task 需要離開
MPU 到 DSP 上開始執行 DSP subtask。我們將 DSP 視為 Server 服務所有的 Task。如同前面所提,每一個 Task 都有一個 CUS server 來服務它的所有 DSP subtask。當一個 Task 其 DSP subtask 進入 DSP 後,需要有 policy 來知道該 DSP subtask 最晚什麼時候可以完成回到 MPU 繼續處理 MPU subtask。因為每一個 task 都有一個 CUS server 為其服務,所以對於每一個 task,我們只要去設定該 task 在 DSP 的 service quality,就可以知道且確定該 task 的 DSP subtask 最遲會
完成的時間。關於如何設定每一個task 在 DSP 上面的 service quality,我們的做
法是去設定服務該task 的 CUS server size,利用 CUS server size 就可以控制一個
Task 在 DSP 的 service quality。
如Fig. 11 所示,當一個 MPU subtask 完成後,接著會 issue 一個 DSP subtask,
在MPU 上就開始呈現 suspend 的狀態。DSP subtask 進入 DSP 後,什麼時候會
開始執行,什麼時候可以完成,無法預先得知。利用先前為每一個Task 所設定
的DSP service quality,我們可以明確知道每一個 DSP subtask 最晚可以在什麼時
間點完成,也就是每一個DSP subtask 都具有 bounded response time, response
time 存在有最大值。當 DSP subtask 完成後就會離開 DSP,該 Task 在 MPU 就
3.5 Task density, deadline and Example
在這個小節,我們將要介紹關於每一個task 其 Density 的算法以及所有
subtask deadline 設定的方式,並以表 1 的 Task1 做為例子求出該 Task 的 density
及所有subtask 的 deadline。
Task 1 with Density=0.25, CUS server size=0.2, Period=145, 2 MPU subtask (τ1,1 ,τ1,3) and 2 DSP subtask(τ1,2 ,τ1,4) Subtask Computation time Arrival time Complete
time Local deadline
τ1,1(MPU) 2 0 5 d1,1 = 0+2/0.25=8
τ1,2(DSP) 10 5 42 d1,2 = 5+10/0.2=55
τ1,3(MPU) 3 42 52 d1,3 = 42+3/0.25=54
τ1,4(DSP) 15 55 75 d1,4= 55+15/0.2=130
Table 1: A normal case example
由前面的敘述可以知道,一個Task 在 DSP 的 response time 和該 Task 的 CUS
server size 有關,一旦知道 CUS server size,就可以知道該 CUS server 所 service
的DSP subtask 最多需要在 DSP 花多少時間,這個時間包括了等待 DSP 的時間
及在DSP 執行的時間。這段時間的算法如下:
以表1 的 Task 1 為例, Task 1 的 CUS server size c1=0.2,由上述的算法,τ1,2
的max response time s1,2為10/0.2=50,τ1,4 的max response time s1,4為15/0.2=75。
當一個Taskτi的所有DSP subtask 的 max response time 求出來後,我們可以
算出τi在一個週期內所有DSP subtask max response time 的總和 Si。因此在一個
週期內,τi的所有MPU subtask response time 的總和不能大於 ( Pi – Si ),其中
Pi為 Task τi的週期。利用這個關係,我們可以知道如何為每一個 Task τi 設定
MPU 上的 density Di。Di 的算法如下式:
Di = Total MPU subtask execution time in a period / (Period Pi –total max response
time Si)
以表1 的 Task 1 為例,S1 = s1,2 + s1,4 = 50 + 75 = 125,Total MPU subtask
execution time = 2 + 3 = 5,週期 P1 = 145,因此我們可以求出 Task 1 的 density D1
= 5 / (145-125) = 0.25。
當一個Task 的 density 大小求出來後,該 Task 的所有 MPU subtask ,當它在
MPU 上 arrive 的時候我們可以由 density 利用下面的方法求出來一個值,我們
稱之為Local Deadline for MPU 。每一個 MPU subtask 的 Local Deadline 被視為
該subtask 最遲必須要完成的時間,也就是最遲會進入 DSP 的時間,我們將它用
來做為MPU 上 EDF 排程方法的依據。
Local Deadline for MPU = arrival time + MPU subtask execution time (ei,j) / Density
(Di)
以表1 的 Task 1 為例,MPU subtaskτ1,1和τ1,3 的 arrival time 分別為 0 和 42,而
且computation time 分別為 2 和 3,所以 τ1,1的local deadline 就是 0 + 2/0.25=8,
τ1,2的local deadline 就是 42 + 3/0.25=54。
相同的,對於所有DSP subtask,當它在 DSP 上 arrive 的時候, 我們一樣可以
由CUS server size 利用下面的方法求出來一個值做為 Local Deadline for DSP。每
一個DSP subtask 的 Local Deadline 被視為該 subtask 最遲必須要完成的時間,
我們將它用來做為DSP 上 EDF 排程方法的依據。
Local Deadline for DSP = arrival time + DSP subtask execution time (ei,j) / CUS
server size (Ci)
且computation time 分別為 10 和 15,所以 τ1,1的local deadline 就是 5+ 10/0.2=
55,τ1,2的local deadline 就是 55 + 15/0.2=130。
總結上述,Task 1 的所有 subtask 的排程,將會如同 Fig. 12 的樣式,其中 d1,1 代
表 MPU subtaskτ1,1 的 Local Deadline , d1,2 代 表 DSP subtaskτ1,2 的 Local
Deadline。Fig.12 有一個地方要注意的就是,當 τ1,3完成之後會issue DSP subtask
τ1,4,不過由於我們在DSP 的排程是採用 CUS 排程方法,τ1,4必須在所屬的CUS
server 在時間點 55 的時候才會補充 budget,所以 τ1,4必須 backlog 直到 τ1,2的
deadline,也就是時間點 d1,2,才能進入DSP 等待開始執行。
Task 1 with Density=0.25, CUS server size=0.2, Period=145, 2 MPU subtask (τ1,1 ,τ1,3) and 2 DSP subtask(τ1,2 ,τ1,4) Subtask Computation time Arrival time Complete
time Local deadline
τ1,1(MPU) 2 0 8 d1,1 = 0+2/0.25=8
τ1,2(DSP) 10 8 58 d1,2 = 8+10/0.2=58
τ1,3(MPU) 3 58 70 d1,3 = 58+3/0.25=70
τ1,4(DSP) 15 70 145 d1,4= 70+15/0.2=145
Table 2: worst case example
表二所列出的數據是Task 1 的 worst case,也就是每一個 subtask 都剛好在
Section 4 Experiment Results
4.1 Experiment Setting and Performance Metrics
如同我們在section 2 所述,在 Fig. 14 可以看出,我們實驗的系統存在有兩
個Core,其中一個 Core 是 ARM 926EJ-S,我們將這個 Core 用來扮演 MPU 的角
色,另一個Core 是工研院所研發的 DSP (PAC DSP),用來負責處理每一個 Task
的DSP subtask。這兩個 Core 之間存在有 shared memory,用來協助這兩個 Core
達到資料共享及同步。此外,關於訊息及命令的傳遞,是採用Mail Box 的方法,
當一個Core 送出命令或是訊息到 Mail Box 之後,會發送 Interrupt 告知另一個
Core,該 Core 就會知道要去處理這些命令及訊息。在 Operating System 方面,
在MPU 我們採用的 uCOSII 這個 popular 即時作業系統用來管理 resource 以及
在實驗的task set 產生的部份,我們撰寫一個 task set generator 的程式,這
個程式產生task set 的順序如下:
1. 為每一個 Task τi產生一個Period Pi,基本上我們讓Task number 愈大的 Task
擁有較大的週期,也就是P1 < P2 < P3 < P4 …,每個週期會有一個範圍的限制( i.e.
800< P1 <1500 ),把不同 Task 的週期做分類,會比較容易觀察實驗結果。
2. 利用上一步驟算出的週期,求出這些週期的 Hyper Period。
3. 亂數產生每一個 Task 的 CUS server size,而且 CUS server size 總和加上 MNPD
所造成的DSP utilization 的總和也不得大於 1。
4. 亂數產生每一個 Task 的 MPU 和 DSP subtask 的 computation time。 5. 利用下列公式求出每一個 task 的 density Di:
Di= ( total MPU subtask computation time of Task i in a period ) / [ Pi-(total DSP subtask computation time in a period / CUS server size Ci) ]
6. 檢查所有 Task 的 density 總和是否小於等於 1。不是的話,就捨棄這組 Task set。
在實驗數據的觀察,我們使用的是RDC ( response time divide by computation
time),將一個 subtask 的 Response time 去除以該 subtask 的 computation time。 RDC 所代表的意義的就一個單位時間的工作,預期要花多久的時間可以完成,
所以RDC 的值最小為 1,在最佳的情形下,一個單位時間的工作可以在一個單
位時間完成。 RDC 的求法如下:
RDC = (Response time of a subtask) / ( Computation time of a subtask )
基本上,一個Task RDC 的值愈小愈好,代表該 Task 在 Arrive 之後,可以很快
的完成工作。在我們的實驗數據當中,我們將一個Task 其 MPU 和 DSP subtask
的RDC 值分開計算,分別求出這些數據的平均值及標準差,且製作出對應的圖
表。
將MPU 和 DSP 的 RDC 值分開計算的原因在於 MPU 和 DSP 排程的屬性不同,
MPU 是 fully preemptive,DSP 是 co-operative,加上 Task 在 MPU 和 DSP 上面
的執行時間差異很大,所以將MPU 和 DSP 的 RDC 分開計算比較能夠看出差異
性。我們的數據紀錄平均值的原因在於,當一個Task 他的 RDC 平均值低於其他
的Task 時,代表這個 Task 的 Response 效果較好,也就是可以預期當這個 Task
arrive 之後,能夠比較快被完成,相反地 RDC 的數值較大,代表著一個 Task arrive
之後,需要經過較長的時間才能complete。因此利用 RDC 的平均值,我們可以
可以看出一個Task 所有 subtask response 的差異性,當一個 Task 其 RDC 的平均
值標準差很大時,就代表著這個Task,在 MPU 或是 DSP 上面執行時,有些 subtask
的response 很快,有些就很慢,差異很大,這可以用來幫助我們對不同的排程
方法進行比較。
4.2 Experiment Result
在這個章節我們將提出實驗數據,首先我們提出的數據是比較有加入
Preemption Point ( with preemption point, WP ) 和 沒有加入 Preemption Point ( not with preemption point, NP )其 RDC 數值的平均值和標準差。基本上每一個實驗,
我們會針對三種不同的CUS server size 的配置方法進行比較,第一種是所有 Task
的CUS server size 相似(差距不大於 0.05),第二種是 CUS server size 和 Task 的
週期成反比,也就是週期愈大的Task 其 CUS server size 愈小。第三種是第二種
是CUS server size 和 Task 的週期成正比,也就是週期愈大的 Task 其 CUS server
size 愈大。為了方便觀察出數據的趨勢,我們讓週期隨著 Task 的 number 做遞增,
也就是Period of Task1<= Period of Task2<= Period of Task3<= Period of Task4。
在下列圖表的X 軸代表不同的 Task,每一個 Task 我們去比較有加入
preemption point (WP) 和沒有加入 preemption point ( NP )的差異。Y 軸代表每一
個Task 其實驗結果 RDC 的平均值或是標準差。
由我們的實驗數據可以看到下列的結果:
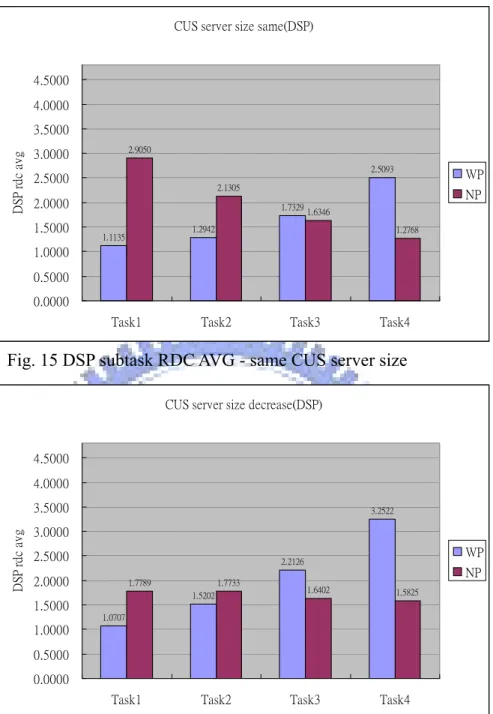
1. 在 WP 的部份,DSP subtask 的 RDC 的平均值會隨著週期遞增,週期小的 Task(ex:Task1)其 DSP subtask RDC 平均值會低於週期大的 Task(ex:Task4)。 2. 在 NP 的部份,DSP subtask 的 RDC 的平均值會隨著週期遞減,週期小的
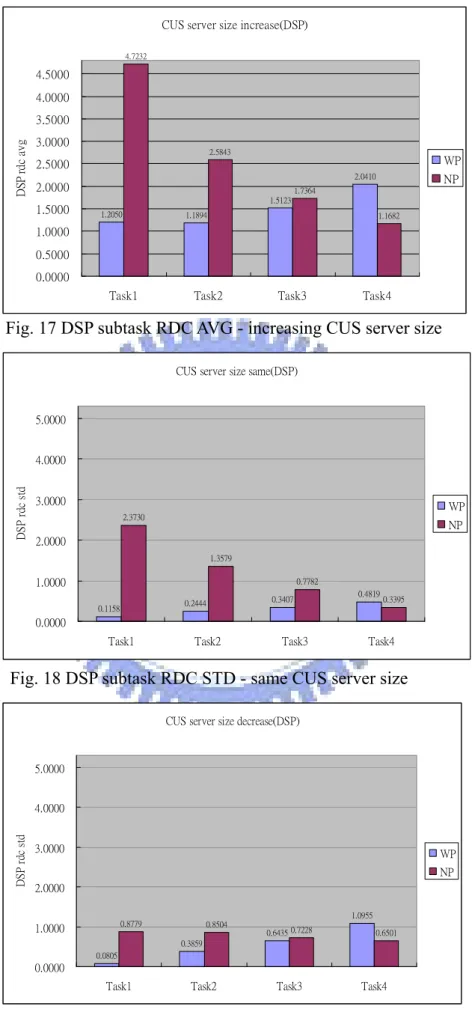
Task(ex:Task1)其 DSP subtask RDC 平均值會高於週期大的 Task(ex:Task4)。 3. WP 在 DSP subtask RDC 的標準差會小於 NP 的 DSP subtask RDC 的標準差。 4. 當一個 Task 其 CUS server 上升時,該 Task 的 DSP subtask 的 RDC 平均值
將會下降。
CUS server size same(DSP) 1.1135 1.2942 1.7329 2.5093 2.9050 2.1305 1.6346 1.2768 0.0000 0.5000 1.0000 1.5000 2.0000 2.5000 3.0000 3.5000 4.0000 4.5000
Task1 Task2 Task3 Task4
D SP r d c av g WP NP
CUS server size decrease(DSP)
1.0707 1.5202 2.2126 3.2522 1.7789 1.7733 1.6402 1.5825 0.0000 0.5000 1.0000 1.5000 2.0000 2.5000 3.0000 3.5000 4.0000 4.5000
Task1 Task2 Task3 Task4
D SP r d c av g WP NP
Fig. 15 DSP subtask RDC AVG - same CUS server size
CUS server size increase(DSP) 1.2050 1.1894 1.5123 2.0410 4.7232 2.5843 1.7364 1.1682 0.0000 0.5000 1.0000 1.5000 2.0000 2.5000 3.0000 3.5000 4.0000 4.5000
Task1 Task2 Task3 Task4
D SP rd c av g WP NP
Fig. 17 DSP subtask RDC AVG - increasing CUS server size
CUS server size same(DSP)
0.1158 0.2444 0.3407 0.4819 2.3730 1.3579 0.7782 0.3395 0.0000 1.0000 2.0000 3.0000 4.0000 5.0000
Task1 Task2 Task3 Task4
DS P r dc st d WP NP
Fig. 18 DSP subtask RDC STD - same CUS server size
CUS server size decrease(DSP)
0.0805 0.3859 0.6435 1.0955 0.8779 0.8504 0.7228 0.6501 0.0000 1.0000 2.0000 3.0000 4.0000 5.0000
Task1 Task2 Task3 Task4
D SP rd c st d WP NP
CUS server size decrease(MPU) 1.0213 1.0779 1.0909 1.1107 1.0218 1.0754 1.0906 1.1040 0.0000 0.2000 0.4000 0.6000 0.8000 1.0000 1.2000
Task1 Task2 Task3 Task4
M P U r d c a v g WP NP CUS server size same(MPU)
1.0086 1.0449 1.0691 1.0802 1.0072 1.0262 1.0570 1.0689 0.0000 0.2000 0.4000 0.6000 0.8000 1.0000 1.2000
Task1 Task2 Task3 Task4
MP U r d c a v g WP NP CUS server size increase(DSP)
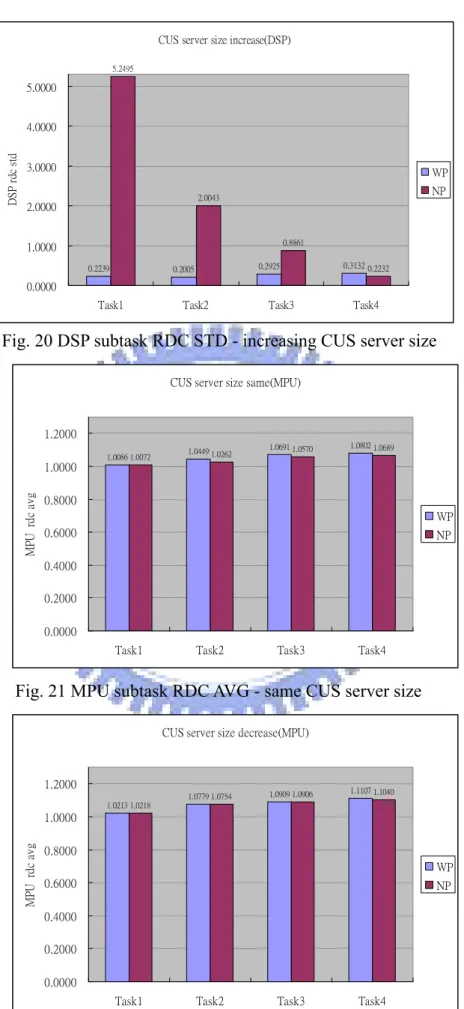
0.2239 0.2005 0.2925 0.3132 5.2495 2.0043 0.8861 0.2232 0.0000 1.0000 2.0000 3.0000 4.0000 5.0000
Task1 Task2 Task3 Task4
D SP rd c st d WP NP
Fig. 20 DSP subtask RDC STD - increasing CUS server size
Fig. 21 MPU subtask RDC AVG - same CUS server size
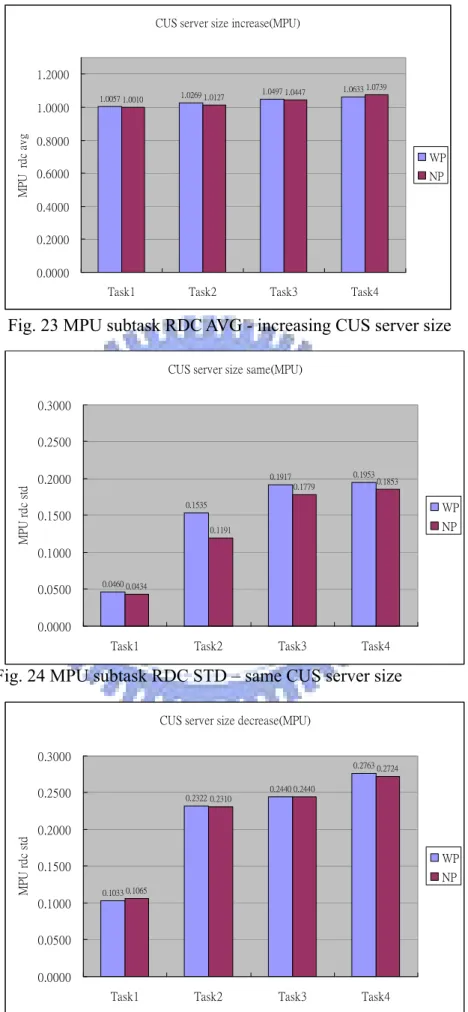
CUS server size increase(MPU) 1.0057 1.0269 1.0497 1.0633 1.0010 1.0127 1.0447 1.0739 0.0000 0.2000 0.4000 0.6000 0.8000 1.0000 1.2000
Task1 Task2 Task3 Task4
M P U r d c a v g WP NP
CUS server size decrease(MPU)
0.1033 0.2322 0.2440 0.2763 0.1065 0.2310 0.2440 0.2724 0.0000 0.0500 0.1000 0.1500 0.2000 0.2500 0.3000
Task1 Task2 Task3 Task4
MP U r d c st d WP NP CUS server size same(MPU)
0.0460 0.1535 0.1917 0.1953 0.0434 0.1191 0.1779 0.1853 0.0000 0.0500 0.1000 0.1500 0.2000 0.2500 0.3000
Task1 Task2 Task3 Task4
MP U r d c st d WP NP
Fig. 23 MPU subtask RDC AVG - increasing CUS server size
Fig. 24 MPU subtask RDC STD – same CUS server size
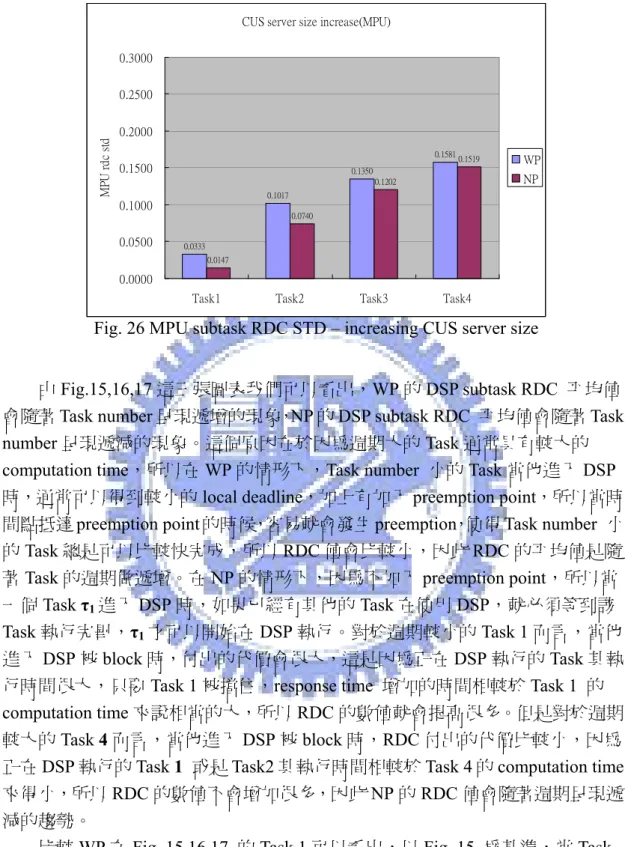
由Fig.15,16,17 這三張圖表我們可以看出,WP 的 DSP subtask RDC 平均值
會隨著Task number 呈現遞增的現象,NP 的 DSP subtask RDC 平均值會隨著 Task
number 呈現遞減的現象。這個原因在於因為週期大的 Task 通常具有較大的 computation time,所以在 WP 的情形下,Task number 小的 Task 當他進入 DSP
時,通常可以得到較小的local deadline,加上有加入 preemption point,所以當時
間點抵達preemption point 的時候,容易就會發生 preemption,使得 Task number 小
的Task 總是可以比較快完成,所以 RDC 值會比較小,因此 RDC 的平均值是隨
著Task 的週期做遞增。在 NP 的情形下,因為不加入 preemption point,所以當
一個Task τ1進入DSP 時,如果已經有其他的 Task 在使用 DSP,就必須等到該
Task 執行完畢,τ1才可以開始在DSP 執行。對於週期較小的 Task 1 而言,當他
進入DSP 被 block 時,付出的代價會很大,這是因為正在 DSP 執行的 Task 其執
行時間很大,只要Task 1 被擋住,response time 增加的時間相較於 Task 1 的
computation time 來說相當的大,所以 RDC 的數值就會提高很多。但是對於週期
較大的Task 4 而言,當他進入 DSP 被 block 時,RDC 付出的代價比較小,因為
正在DSP 執行的 Task 1 或是 Task2 其執行時間相較於 Task 4 的 computation time
來得小,所以RDC 的數值不會增加很多,因此 NP 的 RDC 值會隨著週期呈現遞
減的趨勢。
比較WP 在 Fig. 15,16,17 的 Task 1 可以看出,以 Fig. 15 為基準,當 Task
1CUS server size 變大,由 Fig. 16 可以看出,Task 1 的 response 變好
(1.135->1.0707),但是 Task 4 付出了代價(2.5093->3.2522)。當Task 1CUS server
size 變小,由 Fig. 17 可以看出,Task 1 的 response 變差(1.135->1.2050),,但是 Task 4 response 變好了 (2.5093->2.0410)。由這個結果我們可以看出當週期小
的Task 擁有較大的 CUS server size 時,比較能夠搶到 DSP,response 效果較好,
CUS server size increase(MPU)
0.0333 0.1017 0.1350 0.1581 0.0147 0.0740 0.1202 0.1519 0.0000 0.0500 0.1000 0.1500 0.2000 0.2500 0.3000
Task1 Task2 Task3 Task4
MP U r d c st d WP NP
不過週期大的Task 必須付出代價,要不是搶不到 DSP,就是在 DSP 執行到一半,
就被週期小的Task preempt,response 效果較差。事實上,Fig. 15,16,17 NP 的部
份也有這樣的趨勢。
在Fig. 18,19,20 可以看到有加入 preemption point 的 DSP subtask RDC 標準
差相較於沒有加入preemption point 的 RDC 標準差會小很多,這代表有加入
preemption point 的 case,每一個 DSP subtask 其 response 的時間差異性不會很 大,不會忽快忽慢,response 比較能夠預期,這在排程上是很重要的事情。
在Fig. 21,22,23 可以看出不管有沒有加入 preemption point,MPU subtask 的
RDC 平均值幾乎都是 1,這是因為 MPU subtask 的 computation time 較短,在 MPU 較不容易發生 resource contention,每一個 MPU subtask 進入 MPU 幾乎可
以立刻開始執行。同時,在Fig. 24,25,26 可以看出 MPU subtask 的 RDC 標準差
很小,Task 的 RDC 變異性不大。
Section 5 Conclusion
這分研究最主要的目的是在滿足precedence constraint 的條件下,降低每一
個Task 在 DSP 的 response delay:藉由在 DSP 的排程加入 preemption point,使
得最urgent 的 Task ( Task with smallest deadline )可以優先被排程,減少在 DSP
pending 的時間,避免 miss deadline,同時提高系統的可排程性( schedulability )。
藉由我們的數據分析中可以看出,在加入Preemption Point 的條件下,週期小的
task( always comes with small deadline)的 RDC 的平均值及標準差會比沒有加入 Preemption Point 小很多,代表 response delay 有所下降,而且變異性不大。利用
我們設計在MPU 及 DSP 的排程方法,除了可以滿足 precedence constraint,更可
以預測每一個subtask 的 worst response time。此外,我們所提出在 MPU 及 DSP
的 admission control 方法,可以檢查加入一個 on-line Task 系統是否存在一個 feasible schedule。
References
• [1] R.M. Ramanathan,"Intel Multi-Core Processors Making the Move to Quad-Core and Beyond", Intel Corporation.
• [2] Robert Oshana, DSP Software Development Techniques for Embedded and Real-Time Systems, Newnes, USA, 2006, p.xii
• [3] S.Baruah, J. Goossens, and G.Lipari. Implementing constant-bandwidth servers upon multiprocessor platforms. In Proc. 8th IEEE Real-Time and Embedded
Technology and applications Symposium, pages 154-163, San Jose, CA, September 2002.
• [4] ARM926EJ-S, http://www.arm.com/products/CPUs/ARM926EJ-S.html • [5] Jennifer Eyre, Jeff Bier, "The Evolution of DSP Processors", Berkeley
Design Technology, Inc.
• [6]C. Lee, M. Potkonjak, and W.Wolf. System-level synthesis of application specific systems using a* search and generalized force-directed heuristics. In Proceedings of the 9th Intern. Symposium on System Synthesis, 1996. • [7] H. Oh and S. Ha. Memory-optimized software synthesis from dataflow
program graphs with large data samples.
• EURASIP Journal on Applied Signal Processing, pages 514–529, 2003. • [8]Y. Cho et al. Scheduler implementation in MP SoC design. In Proceedings of
the conference on Asia South Pacific Design Automation Conference, 2005. • [9] L.-F. Leung, C.-Y. Tsui, and W.-H. Ki. “Minimizing energy consumption of
multiple-processors-core systems with simultaneous task allocation, scheduling and voltage assignment." In ASPDAC, 2004.
• [10] M. Ruggieroy et al. “Communication aware allocation and scheduling framework for stream oriented multi-processor systems on chip." In DATE ,2006.
• [11] Ya-Shu Chen et al. “Dynamic Task Scheduling and Processing Element Allocation for Multi-Function SoCs"
Appendix
1. 針對 JPEG Encoding 的幾個步驟包含 FDCT, Quantization, DPCM, Encode 這
四個步驟,我們在X86 的系統上,利用 RDTSC 這個指令去計算這四個步驟
執行時間的比例關係:
FDCT Quantization DPCM Encode
Clock cycles 7752 7514 153 12818
Table:3 The clock cycles of each step in JPEG encoding
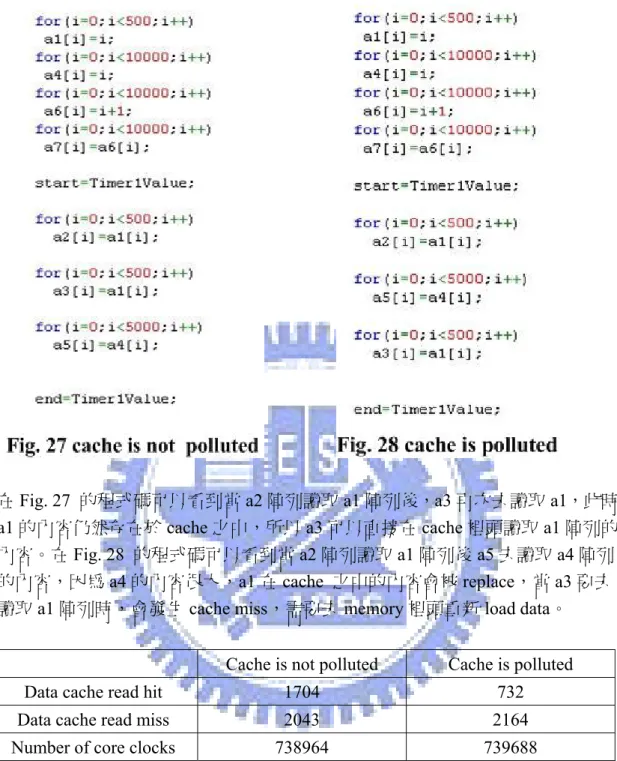
2. 我們的平台上的 D-cache 是 4-way associative,D-cache 大小為 16KB,type 為 write back,replacement policy 為 Round Robin。我們去比較 cache 有經過
在Fig. 27 的程式碼可以看到當 a2 陣列讀取 a1 陣列後,a3 再次去讀取 a1,此時
a1 的內容仍然存在於 cache 之中,所以 a3 可以直接在 cache 裡頭讀取 a1 陣列的
內容。在Fig. 28 的程式碼可以看到當 a2 陣列讀取 a1 陣列後 a5 去讀取 a4 陣列
的內容,因為a4 的內容很大,a1 在 cache 之中的內容會被 replace,當 a3 要去
讀取a1 陣列時,會發生 cache miss,需要去 memory 裡頭重新 load data。
Cache is not polluted Cache is polluted
Data cache read hit 1704 732
Data cache read miss 2043 2164
Number of core clocks 738964 739688