Journal of Engineering Technology and Education, ISSN 1813-3851
島嶼電力系統在柴油引擎輸出變動下的特性分析
陳盟仁1 *、吳有基2、劉國才1、林勝風1 1國立高雄應用科技大學 電機工程系 2國立聯合大學 電機工程學系 *E-mail: [email protected]摘 要
本研究探討一個島嶼電力系統在柴油引擎輸出功率變動下的動態特性。主要的研究內容為模擬三套併 聯且具負載追隨性的柴油引擎發電系統其中兩套變成固定輸出功率時系統變動的情形。研究方法為先建立 系統組件的數學模型,接著利用軟體工具 Matlab/Simulink 開發模組,最後進行模擬分析。研究結果顯示在 此種運轉模式下此島嶼電力系統能穩定運轉,柴油引擎發電系統的輸出功率也如預期的變動。此研究最大 的價值是可以做為島嶼電力系統規劃、運轉、以及擴充的重要參考。 關鍵詞:柴油引擎發電系統、負載追隨性、熱力模型、調速系統、轉軸模型、Matlab/Simulink、 SimPowerSystems1. 前 言
柴油引擎發電系統常用來供應與市電相對容量較小的系統如島嶼電力系統、工業用電系統、以及船舶 電力系統等。在許多偏遠或離島等地區,一般中心電廠所發出之電力難以傳輸到這些地方,因此柴油引擎 發電成為最常使用在這些區域的發電技術。主要是因為柴油引擎裝置具有啟動容易、設備費用低廉、建廠 期間短、以及電壓、頻率調節穩定等優點。然而,發電系統與負載之間的容量比太小所引起的電力品質問 題相當值得關切。為了減少燃料成本及因石化燃料造成污染,將柴油引擎結合其它再生能源供電系統形成 混合式系統來維持可接受的電力品質與可靠的電力供應是的一種非常經濟的區域供電方式[1], [2]。 柴油引擎相關的研究有很多。在柴油引擎發電機的模型方面,文獻[3]探討了備轉柴油引擎發電系統的 特性並且印證了 EMTP 模組的適用性。該論文也預測了發電機的電壓與頻率並且提出模擬結果。文獻[4]提 出了一個新的渦輪增壓式柴油引擎發電機的動態模型並且探討了分散式發電系統對配電系統的衝擊。文獻 [5]提出了一個用於分析獨立型永磁柴油發電機穩態模型的方法並且使用了電力電子裝置來控制發電機的端 電壓。文獻[6]使用了一種非線性識別方法來建立渦輪增壓式柴油引擎的模型。文獻[7]利用一個以 K-L 轉換 為基礎的修正 GMDH 演算法來建立柴油引擎的非線性燃燒系統模型,使得演算法的階數較少而且穩定度更 高。 此外,在柴油引擎的控制方面,文獻[8]探討了一種應用於可變幾何渦輪增壓器的滑動模式控制方式並 且準確地得到空氣-燃料比率與有效的廢氣循環率控制。文獻[9]提出一種具有整合式控制器的柴油發電系統 以做為三相及單相配電系統的備用電源;此控制器具有補償相電流不平衡、自動電壓調節器、以及以數位 信號處理器為基礎的調速機構,使得發電機可以在不影響系統的情況下併入或從系統切離。文獻[10]提出一 種用於克服引擎轉速和轉矩控制問題的模型參考適應控制法,除了使用 Lyapunov 穩定度理論建立參數更新 法則外,也使用實際的引擎和發電機進行模擬。文獻[11]探討了柴油引擎參數識別以及專家控制設計的方法 以得到最佳的轉速調節、負載擾動的強韌性、以及燃料效率。文獻[12]將適應控制方法應用於柴油發電廠並 且得到良好的速度控制效果。然而,在這些文獻中都沒有探討到柴油引擎輸出功率變動對系統的影響。低負載為 4MVA,最高負載為 12MVA,再生能源發電系統最高佔比達 60%,這對系統設計而言是一大挑戰。
圖 1 島嶼電力系統架構
2.2 柴油引擎原動機模型
柴油引擎原動機模型的建立常常是藉由採用製造商所提供的引擎特性資料來完成。圖 2 為一個柴油引 擎原動機的架構圖。此模型主要包括三個子系統-熱力模型、調速模型、以及轉軸模型[13]。
圖 2 油引擎原動機架構圖 熱力模型方面,在正常情況下引擎的轉矩和燃料成正比。在空氣供應充足的情況下,燃料能夠完全燃 燒,因此轉矩可以考慮成和油箱準位成正比。然而,在暫態以及重載情況下,燃料無法完全燃燒,此時轉 矩會受到空氣供應量的限制。為了要改善此種情形,通常會裝設渦輪增壓器。 在調速模型方面,轉速調節是透過原動機的調速系統來達成。當發電機轉速偏離額定轉速時,調速機 構會偵測到轉速變動,因而改變輸入閥門的位置,調整原動機的輸出,使速度達到穩態值。圖 3 為一個典 型的柴油引擎調速系統的架構圖。此系統的狀態方程式可以表示成 1 1 1 1 1 2 2 2 2 3 D1 2 D1 3 3 2 3 2 3 3 4 4 D 3 D1 D 3 D 3 2 D1 3 D 3 3 4 2 3 4 2 3 4 3 4 4 1 0 0 0 1 1 0 0 T T T x 1 1 x 0 0 0 0 0 0 T T x x p 1 0 0 0 x KT K ( T T ) 1 x 0 T T T T T T x x KT 0 0 0 KT T KT ( T T ) T T ) 1 T T T T T T T T T T T e ref ref P 0
(1) D 1 D 1 2 K 1 2 2 2T
T
x
K [
x
( 1
)x ]
T
T
(2) D1 D3 D3 D1 3 D3 D3 3 K 1 2 3 ref 2 3 2 3 3 3KT T
KT ( 1 T )
T
T
T
x
x
x
x
P
T T
T T
T
T
(3) 其中ωe為引擎轉速,ωref為參考轉速,Pref為參考功率設定。1 1 1 12 12 1 1 1 1 1 1 1 b1 1 1 2 2 2 b2 2 12 2 12 2 2 2 2 2 2 2 0 1 0 0 0 0 0 0 C C C D D 1 1 0 0 J J J J J J p 0 0 0 1 0 0 0 0 C C C 1 1 D D 0 0 J J J J J J (9) 其中J1是旋轉體一和耦合器總和的轉動慣量,J2是旋轉體二和耦合器總和的轉動慣量,D1是轉軸一的硬度
係數(Shaft Stiffness),D2是轉軸二的硬度係數,C1是旋轉體一的阻尼係數(Damping Coefficient),C2是
旋轉體二的阻尼係數,C12 是旋轉體一和旋轉體二連接軸的阻尼係數,τb1是旋轉體一的軸承損失(Bearing Loss),τb2是旋轉體二的軸承損失,D 是 D1與D2的總和[14]。 圖 4 簡化的雙質量體傳動系統架構圖 2.3 同步發電機模型 同步發電機運轉時除了必須有原動機供應機械功率外,還要有激磁系統來調節端電壓。同步發電機的 定子結構為三相對稱,轉子結構則有凸極式與圓柱形兩種。同步發電機的電壓方程式參考到轉子軸後,可
表示成 qs s q r d mq r md r md qs ds r q s d r mq md md ds kq mq kq kq kq fd md fd fd md fd kd md md kd kd kd v r pL L pL L L i v L r pL L pL pL i v pL 0 r pL 0 0 i v 0 pL 0 r pL pL i v 0 pL 0 pL r pL i
(10) 上式中vds、ids為 d 軸定子電壓及電流,vqs、iqs為 q 軸定子電壓及電流,vkq、ikq為 q 軸阻尼繞組電壓及電流, vfd、vkd、ifd、ikd為激磁電壓、d 軸阻尼繞組電壓、激磁電流、d 軸阻尼繞組電流,rs、rfd、rkd、rkq為定子電 阻、激磁繞組電阻、d 軸阻尼繞組電阻、q 軸阻尼繞組電阻,Ld、Lq、Lfd、Lkd、Lkq為 d 軸電感、q 軸電感、 激磁繞組電感、d 軸阻尼繞組電感、q 軸阻尼繞組電感,Lmd、Lmq為 d 軸互感、q 軸互感,p 為微分運算元[15], [16]。此外,同步發電機所產生的電磁轉矩可表示成 e md ds fd kd qs mq qs kq ds3
T
n[ L ( i
i
i )i
L ( i
i )i ]
2
(11)其中n 是極對的數目(Number of pole pairs)。
2.4 激磁系統模型
同步發電機利用端電壓回授信號經由自動電壓調整器(Automatic Voltage Regulator,AVR)來改變磁激 電壓,進而控制同步發電機端電壓[17], [18]。圖 5 為 IEEE Type 1 激磁控制系統方塊圖。 此系統的狀態方程式可表示成 R R T 1 A A 1 A ref A A A A 2 2 3 E E 3 2L E E 4 4 2L F F E E E F E F F 1 1 0 0 0 0 0 0 T T v x K 1 K x K 0 0 0 0 v T T T T x x p x ( K S ) x 1 x 0 0 0 0 0 0 T T x x x K K ( K S ) 1 0 0 0 0 0 T T T T T (12)
圖 5 IEEE Type1 激磁控制系統方塊圖 2.5 感應電動機模型 三相感應電動機定子結構為三相對稱繞組,轉子結構有鼠籠式或繞線式兩種繞組。三相感應電機的電 壓方程式參考到靜止軸後,可表示成 qs s ss m qs ds s ss m ds qr m r m r rr r rr qr dr r m m r rr r rr dr
v
r
pL
0
pL
0
i
v
0
r
pL
0
pL
i
v
pL
L
r
pL
L
i
v
L
pL
L
r
pL
i
(13) 其中vds、ids是 d 軸定子電壓及電流,vqs、iqs是 q 軸定子電壓及電流,vdr、idr是 d 軸轉子電壓及電流,vqr、 iqr是 q 軸轉子電壓及電流,rs、rr是定子電阻及轉子電阻,Lss、Lrr是定子電感及轉子電感,Lm是磁化電感, p 是微分運算元[15], [16]。此外,感應發電機的電磁轉矩可表示成 e m q s d r d s q r3
T
nL ( i i
i i )
2
(14) 其中n 是極對的數目。 2.6 三相變壓器模型 變壓器的主要目的是在相同頻率下,將能量從一個電壓準位轉換至另一個電壓準位。三相變壓器的電 壓方程式可表示成 q1 1 11 m q1 d 1 1 11 m d 1 q2 m 2 22 q2 d 2 m 2 22 d 2 v r pL 0 pL 0 i v 0 r pL 0 pL i v pL 0 r pL 0 i v 0 pL 0 r pL i (15)其中vd1及id1是 d 軸一次側電壓及電流,vq1及iq1是 q 軸一次側電壓及電流,vd2及id2是 d 軸二次側電壓及 電流,vq2及iq2是 q 軸二次側電壓及電流,r1及r2是一次側電阻及二次側電阻,L11及L22是一次側自感及二 次側自感,Lm是磁化電感,p 是微分運算子[15], [16]。 2.7 靜態負載模型 集總的靜態負載可考慮成包含電阻性和電感性負載,其電壓方程式可表示成
0
0
qk sk sk qk dk sk sk dkv
r
pL
i
v
r
pL
i
(16) 其中vdk及idk是 d 軸電壓及電流,vqk及iqk是 q 軸電壓及電流,rsk及Lsk是電阻及電感,p 是微分運算子[15], [16]。3. 島嶼電力系統在柴油引擎輸出變動下的特性模擬
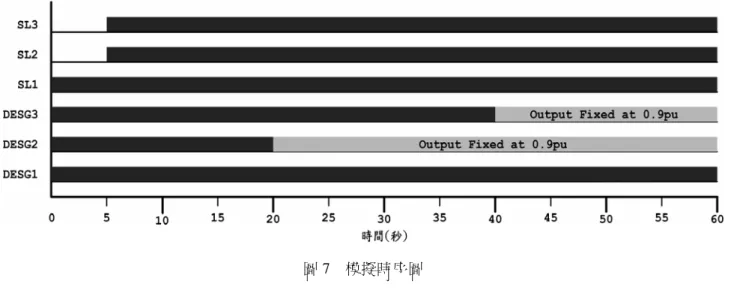
3.1 SimPowerSystems 模組架構 圖 6 為使用 SimPowerSystems 開發的模組,包括三套柴油引擎發電系統模組與三個負載模組[17], [18]。 圖 6 三套柴油引擎發電系統與三個負載的 SimPowerSystems 模組架構圖圖 7 模擬時序圖
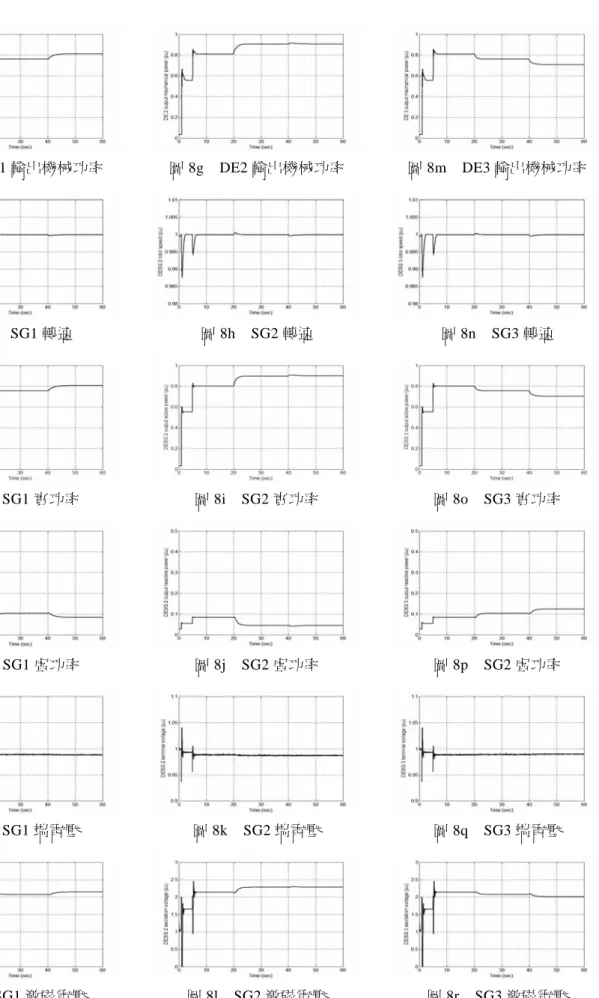
圖 8a 顯示第一套柴油引擎的輸出功率在 20 秒前隨著負載的增加而增加並且與其它兩套平均供應功 率,每套約 0.8pu,20 秒時由於第二套柴油引擎的輸出增加為 0.9pu,因此輸出降低為 0.75pu,40 秒時第三 套輸出降低為 0.7pu,使得輸出又提昇為 0.8pu。圖 8b 顯示當負載投入時,轉速有 1%的變動,但很快就恢 復到同步速度,20 秒與 40 秒時因為輸出功率的變動使得轉速略有變動,輸出增加時轉速下降,輸出減少時 轉速上昇,最後維持在 1.0pu。圖 8c 顯示第一套發電機的輸出實功率隨著原動機的輸入機械功率而變動, 當然也受到負載的增加以及其它兩套發電系統實功率輸出量的影響。圖 8d 顯示第一套發電機的輸出虛功率 在 20 秒前隨著靜態負載的投入而增加,20 秒後受到其它兩套發電系統虛功率輸出量的影響,先增加再減 少,最後維持在約 0.09pu。圖 8e 顯示端電壓在 1 秒與 5 秒負載投入時有明顯的暫態,但很快趨於穩定,後 來雖然其它發電機的輸出功率變動,對電壓幾乎沒有影響,維持在略低於 1.0pu。圖 8f 顯示發電機激磁電 壓隨著端電壓的變動而變動,端電壓下降,激磁電壓上升,端電壓上升,激磁電壓下降。 圖 8g 顯示第二套柴油引擎的輸出機械功率在 20 秒時增加為 0.9pu,雖然 40 秒時第三套輸出降低為 0.7pu,對它卻亳無影響。圖 8h 顯示因為與其它兩套併聯運轉,因此轉速的變動情形與其它兩套都相同。圖 8i 顯示實功率變動情形與柴油引擎的輸出機械功率相同,20 秒後即增加為 0.9pu。圖 8j 顯示 20 秒時輸出虛 功率下降,最後維持在約 0.05pu。圖 8k 顯示 20 秒後雖然虛功率略微下降,對電壓幾乎沒有影響,維持在 略低於 1.0pu。圖 8l 顯示發電機激磁電壓隨著端電壓的變動而變動,端電壓下降,激磁電壓上升,端電壓上 升,激磁電壓下降。 圖 8m 顯示 20 秒時第二套柴油引擎輸出機械功率增加為 0.9pu,使得第三套柴油引擎的輸出降低了 0.05pu,在 40 秒時降低為 0.7pu。圖 8n 顯示因為與其它機組併聯運轉,因此轉速的變動情形與其它兩套都 相同。圖 8o 顯示實功率變動情形與柴油引擎的輸出機械功率相同,40 秒後即依設定降低為 0.7pu。圖 8p 顯示 20 秒時虛功率輸出量增加,40 秒時再次增加,最後維持在約 0.13pu。圖 8q 顯示 20 秒後虛功率的變動,
對電壓幾乎沒有影響,維持在略低於 1.0pu。圖 8r 顯示發電機激磁電壓隨著端電壓的變動而變動,端電壓 下降,激磁電壓上升,端電壓上升,激磁電壓下降。 3.4 評 論 本模擬主要在瞭解發柴油引擎發電系統輸出功率變動時對系統的影響。結果發現有機組增加輸出功率 時,具有負載追隨性的機組會降低輸出功率;同樣地,有機組增加降低輸出功率時,具有負載追隨性的機 組會增加輸出功率。除了實功率之外,虛功率也有相同的情形。此外,因為三套機組併聯,因此電壓和頻 率(轉速)的變化情形都相同。整體而言,在這種運轉模式下系統變數的變動情形都是可以接受的。研究 結果與預期一致。
4.結 論
本研究探討一個島嶼電力系統在柴油引擎輸出變動下的動態特性。主要的研究內容為一套柴油引擎發 電系統具負載追隨性,其它兩套輸出功率固定時系統變數變動的情形。研究結果顯示在此種運轉模式下此 島嶼電力系統的系統變數變動情形都是可接受的系統能穩定運轉。柴油引擎發電系統的輸出功率也如預期 的變動。此研究最大的價值是可以做為島嶼電力系統規劃、運轉、以及擴充的重要參考。參考文獻
[1] 台灣電力公司,http://www.taipower.com.tw。[2] Borbely, J. Kreider, Distributed Generation: The Power Paradigm for the New Millennium, CRC Press, 2001
[3] I.D. Hassan, R. Weronick, R.M. Bucci, and W. Busch, “Evaluating the Transient Performance of Standby Diesel-Generator Units by Simulation,” IEEE Transactions on Energy Conversion, Vol. 7, No. 3, pp. 470-477, Sep. 1992 [4] G. Claeys, N. Retiere, N. HadjSaid, P. Lemerle, E. Varret, and R. Belhomme, “Dynamic Modeling of Turbo-Charged
Diesel Engine for Power System Studies,” 2001 Power Industry Computer Applications,.2001, pp. 312-317
[5 M.A. Rahman, A.M. Osheiba, T.S. Radwan, and E.S. Abdin, “Modelling and Controller Design of an Isolated Diesel Engine Permanent Magnet Synchronous Generator,” IEEE Transactions on Energy Conversion, Vol. 11, No. 2, pp. 324-330, June 1996
[6] A. Rachid, A. Liazid, and J.C. Champoussin, “Nonlinear Modelling of a Turbocharged Diesel Engine,” 1994.,
Proceedings of the Third IEEE Conference on Control Applications, Vol. 1, 1994, pp. 133-136
[7] Y.-G. Zhang, S.-B. Tian, B.-C. Yang, and D.-Z. Lu, “Research on Modelling of Combustion Process in Diesel Engines,”
Proceedings of the IEEE International Symposium on Industrial Electronics, Vol. 2, 1992, pp. 518-522
[8] V.L. Utkin, H.-C. Chang; I. Kolmanovsky, and J.A. Cook, “Sliding Mode Control for Variable Geometry Turbocharged Diesel Engines,” Proceedings of the American Control Conference, Vol. 1 , 2000, pp. 584-588
[9] C.Y. Jeong, J.G. Cho, J.W. Baek, D.W. Yoo, “A New Integrated Controller Based 100 Kva Mobile Engine Generator for Single/Three Phase Distribution Line Backup,” Fifteenth Annual Applied Power Electronics Conference and Exposition, Vol. 2, 2000, pp. 902-907
[10] D. Yanakiev, “Adaptive Control of Diesel Engine-Dynamometer Systems,” Proceedings of the 37th IEEE Conference on
Decision and Control, Vol. 2, 1998, pp. 1530-1534
[11] F. Karray and E. Conrad, “Design of Intelligent Controllers for Electronic Speed Regulation of a Diesel Engine,” First
International Conference on Knowledge-Based Intelligent Electronic Systems, Vol. 2, 1997, pp. 607-616
[12] S. Roy, O.P. Malik, and G.S. Hope, “An Adaptive Control Scheme for Speed Control of Diesel Driven Power Plants,”
IEEE Transactions on Energy Conversion, Vol. 6, No. 4, pp. 605-9, Dec. 1991
[13] J. Delesalle and I. Kauffmann, “Réponse Des Moteurs Diesel Suralimentés Aux Variations Rapides De Puissance Appelée Simulation Mathématique Et Applications,” CIMAC, A, 1977, Pap. A9
[14] J.R. Smith, A.F. Stronach, and T. Tsao, “Digital simulation of marine electro-mechanical drive systems,” IEEE
Transactions on Industry Applications, IA-18, 1982, pp.393-399
[15] P.C. Krause, Analysis of Electric Machinery and Drive System, 2nd Ed, McGRAW-Hill Book Co., USA, Dec 2001 [16] C.-M. Ong, Dynamic Simulation of Electric Machinery using MATLAB/Simulink, McGRAW-Hill Book Co., USA, 1998 [17] IEEE Committee Report, IEEE Guide for Identification, Testing and Evaluation of the Dynamic Performance of
Excitation Control Systems, ANSI/IEEE Std 421A-1987, June 1978
[18] IEEE Committee Report, “Excitation System Models for Power System Stability Studies,” IEEE Transactions on Power
Apparatus and Systems, PAS-100, 1981, pp.494-509
[19] Using Simulink, The Mathworks Inc., 2009
圖 8b SG1 轉速 圖 8h SG2 轉速 圖 8n SG3 轉速 圖 8c SG1 實功率 圖 8i SG2 實功率 圖 8o SG3 實功率 圖 8d SG1 虛功率 圖 8j SG2 虛功率 圖 8p SG2 虛功率 圖 8e SG1 端電壓 圖 8k SG2 端電壓 圖 8q SG3 端電壓 圖 8f SG1 激磁電壓 圖 8l SG2 激磁電壓 圖 8r SG3 激磁電壓 圖 8 柴油引擎發電系統變數變動情形