脈動感測元件的研究與製作
脈動感測元件的研究與製作
脈動感測元件的研究與製作
脈動感測元件的研究與製作
學生:張智鈞 指導教授:何世偉 博士 大華技術學院 機電工程研究所 摘要 摘要 摘要 摘要 本研究利用 LEGO 公司所研發的 NXT9797 系統,此系統有完善 的模組化原件,簡單易學,是一套相當容易學習上手的機器人系統, 因而被大量使用在機器人的教育與訓練上。 利用 PPG(Photoplethysmogram)系統擷取人體心跳(心搏)訊號,透 過樂高機器人系統中的 ARM7 微處理器,將生理的類比訊號轉為數 位訊號,再利用 ARM7 微處理器中的藍芽傳輸裝置,將訊號傳至遠 端的伺服器。 從實驗結果中可以證明,本研究成功的利用電壓與電阻器來確認 ARM7 微處理器的訊號輸入精度和校準,不但可將 PPG 量得之電阻 訊號傳入樂高機器人系統中,同時可再利用 ARM7 微處理器中的程式撰寫,將數位生理訊號藉由藍芽傳至遠端的伺服器。以往的樂高機 器人感測元件中,並未見有可感測生理訊號者,而大多是有關距離、 光、聲音和接觸等的感測元件,但本研究證明,可以將生理感測的概 念加入樂高機器人系統中,並開發成為生理感測器的樂高感測模組, 使樂高機器人的模組更多樣化,相信必能提高在教育與育教於樂的價 值。 關鍵字: ARM7 微處理器、PPG
目錄
目錄
目錄
目錄
中文摘要...I 目錄...III 圖目錄...VI 第一章 前言...1 第二章 設備介紹...5 2-1 硬體介紹...5 2-1-1 ARM7 微處理器...5 2-1-2 Bluetooth 介紹...7 2-1-2-1 藍芽通訊系統的特性與目的...8 2-1-2-2 藍芽的技術理論...8 2-1-2-3 藍芽技術優劣區分...9 2-1-3 脈動感測元件介紹...10 2-2 軟體介紹...16 2-2-1 LabView 介紹...16 2-2-2 NXT-G 介紹...24 第三章 研究方法...33 3-1 研究目的...33 3-2 ARM7 I/O 訊號的校準方式...353-2-1 溫度量測的過程方法與精度確認...35 3-2-2 電壓量測的過程方法與精度確認...37 3-2-3 電阻量測的過程方法與精度確認...39 3-3 脈動感測器的製作...43 3-3-1 LabView 程式解說...44 3-3-1-1 搜尋目標...44 3-3-1-2 連線配對...44 3-3-1-3 資料顯示...45 3-3-2 電路圖形解說...47 3-3-2-1 光耦合器偏壓電路...47 3-3-2-2 高通濾波器...48 3-3-2-3 反相放大器...48 3-3-2-4 低通濾波器...49 3-3-2-5 微分器...50 3-3-2-6 反向器...50 3-3-2-7 放大器...51 3-3-2-8 比較器...52 3-3-3 脈動感測元件實驗過程...52 第四章 實驗結果與討論...54
4-1 實驗結果...54 4-1-1 心電圖測試程序...55 4-1-2 藍芽傳輸測試...56 4-1-3 實驗完成圖...57 4-2 討論...59 第五章 未來研究方向...60 參考文獻...61
圖目錄
圖目錄
圖目錄
圖目錄
圖 2-1 ARM7 微處理器與感測器...6 圖 2-2 光耦合器電路圖...11 圖 2-3 自製脈動感測元件(紅線框為光耦合器)...11 圖 2-4 TL082 接腳圖...12 圖 2-5 自製脈動感測元件(紅線框為 TL082)...12 圖 2-6 LM741 接腳圖...13 圖 2-7 自製脈動感測元件(紅線框為 LM741)...13 圖 2-8 光容積電路圖...14 圖 2-9 自製 LabView 程式(傳輸端)...17 圖 2-10 自製 LabView 程式(傳輸端)...17 圖 2-11 自製 LabView 程式(傳輸端)...18 圖 2-12 自製 LabView 程式(傳輸端)...18 圖 2-13 自製 LabView 程式(傳輸端)...19 圖 2-14 自製 LabView 程式(傳輸端)...19 圖 2-15 自製 LabView 程式(傳輸端)...20 圖 2-16 自製 LabView 程式(傳輸端)...20 圖 2-17 自製 LabView 程式(傳輸端)...21 圖 2-18 自製 LabView 程式(傳輸端)...21圖 2-19 自製 LabView 程式(傳輸端)...22 圖 2-20 自製 LabView 程式(接收端)...22 圖 2-21 自製 LabView 程式(接收端)...23 圖 2-22 自製 LabView 程式(接收端)...23 圖 2-23 自行設計之例題圖形...24 圖 2-24 自製 NXT-G 程式...24 圖 2-25 自製 NXT-G 程式...25 圖 2-26 自製 NXT-G 程式...25 圖 2-27 自製 NXT-G 程式...26 圖 2-28 自製 NXT-G 程式...26 圖 2-29 自製 NXT-G 程式...27 圖 2-30 自製 NXT-G 程式...27 圖 2-31 自製 NXT-G 程式...28 圖 2-32 自製 NXT-G 程式...28 圖 2-33 自製 NXT-G 程式...29 圖 2-34 自製 NXT-G 程式...29 圖 2-35 自製 NXT-G 程式...30 圖 2-36 自製 NXT-G 程式...30 圖 2-37 自製 NXT-G 程式...31
圖 2-38 自製 NXT-G 程式...31 圖 2-39 自製 NXT-G 程式...32 圖 2-40 自製 NXT-G 程式...32 圖 3-1 量測溫度與測量溫度比較圖...36 圖 3-2 溫度感測器...37 圖 3-3 電壓感測器...38 圖 3-4 NXT-G 程式編輯(電壓)...39 圖 3-5 NXT-G 螢幕顯示數據...39 圖 3-6 電阻感測器...40 圖 3-7 NXT-G 程式編輯(電阻)...41 圖 3-8 100Ω測試...41 圖 3-9 1KΩ測試...42 圖 3-10 自製脈動感測器...43 圖 3-11 自製 LabView 無線傳輸程式...44 圖 3-12 自製 LabView 無線傳輸程式...45 圖 3-13 自製 LabView 無線傳輸程式...45 圖 3-14 自製 LabView 無線傳輸程式...46 圖 3-15 PPG 電路圖形...47 圖 3-16 PPG 電路圖形...48
圖 3-17 PPG 電路圖形...49 圖 3-18 PPG 電路圖形...49 圖 3-19 PPG 電路圖形...50 圖 3-20 PPG 電路圖形...51 圖 3-21 PPG 電路圖形...51 圖 3-22 PPG 電路圖形...52 圖 3-23 訊號流程圖...53 圖 3-24 同步顯示...53 圖 4-1 PPG 電路圖...54 圖 4-2 PPG 電路...55 圖 4-3 測試完成圖...56 圖 4-4 示波器圖形與 LabView 顯示之波型比較...57 圖 4-5 實驗完成圖...58
第一章
第一章
第一章
第一章、
、
、
、 前言
前言
前言
前言
1932 年,丹麥木匠奥爾·科克·克里斯蒂安森開始製作木製玩
具,公司名 Lego 來自丹麥語「leg godt」,指「玩得好」。1947 年 由兒童心理學家 Hilary Harry Fisher P age 設計製作的膠製積木並 且擁有專利。1949 年,奥爾·科克·克里斯蒂安森和兒子開始生產 類似的玩具,獨特之處就是它們能緊密的扣在一起。 樂高積木按照單位元件由大到小可分為四個系列:baby, quatro,duplo 和標準 lego,分别對應於 1-18 個月,2-3 歲,2-6 歲和 4 歲以上的四個年齡層的兒童。樂高積木設計精美且色彩多 變,富變化性。和其他積木玩具不同的地方在於擁有廣大的成年 玩家,大多為自兒童時期就受到樂高積木的吸引,而等有經濟能 力後便開以收藏把玩為購買誘因,全球有 125 個國家樂高積木皆 擁有市場,推估有 3 億孩童曾經是他們的顧客。 「樂高多創意,件件考心思」是早年樂高的宣傳口號。樂高 積木表面看來平淡無奇,但只要稍花心思便可以創出不同東西。 樂高迷及樂高公司都不斷實踐這句話的意思,對樂高灌注大量創 意,令這件在過去一直被視為小孩子專利的玩具演變成藝術品甚 至是創意輔助工具。樂高玩具為極出色的寓教於樂學習工具,孩
創造力做出千百萬種變化組合。如果有六塊八顆凸起的長方體 LEGO 積木,這六塊積木可以砌出 102,981,500 多款組合。 樂高集團(LEGO Group)由固守傳統的老牌玩具製造商,到 近年來面對市場與環境的嚴酷考驗,重新思考與定位產品策略, 整合機器人科技並推出全新產品扭轉形勢,其應變的過程與做法 頗值得國內玩具與教育娛樂相關產業參考學習。 樂 高 公 司 最 近 推 出 了 新 一 代 的 樂 高 機 器 人 , 叫 做 LEGO MINDSTORMS NXT, 這 款 新 樂 高 機 器 人 採 用 了 32位 元 微 處 理 器、內 建 USB和 藍 芽,可 以 讓 使 用 者 做 出 透 過 藍 芽 裝 置 控 制 的 機 器 人。NXT內 附 的 程 式 編 輯 工 具 支 援 PC和 Mac,為 了 吸 引 更 多 玩 家 參 與 擴 充 與 改 造 NXT,樂 高 公 司 特 別 發 表 了 開 放 原 始 碼 的 韌 體 和 開 發 工 具,就 連 微 軟 都 忍 不 住 加 入 機 器 人 開 發 軟 體 的 行 列 , 推 出 Microsoft Robotics Studio軟 體 , 美 國 的 卡 內 基 大 學 也 針 對 此 硬 體 自 行 開 發 專 門 在 NXT上 編 輯 程 式 的 軟 體 RobotC, 以 C為 架 構 而 且 程 式 都 已 經 模 組 化 , 使 用 者 只 要 利 用 模 組 化 的 指 令 再 加 上 所 需 數 據 即 可 控 制 NXT。除 了 主 機 功 能 大 幅 增 強,NXT的 馬 達 也 改 採 伺 服 控 制,能 讓 程 式 精 確 地 調 整 速 度;為 了 增 加 功 能 性 感 測 器 也 變 得 多 樣:超 音 波 感 應 器( 大 多 用 於 感 應 障 礙 物 ),能 夠 辯 識 顏 色 和 亮 度 的 光 線 感 應 器 …等 等。
在大華技術學院何世偉教授的領導下,培訓了一批研究生,開發 了一些有關於 LEGO 機器人的課程,並設置了一間樂高機器人教學中 心教室。課程內容包括機器人感測器介紹、機器人基本指令介紹、機 器人組裝基本型、機器人基本指令應用、組裝基本型機器人、機器人 走直線、機器人利用聲音使之拍走拍停、機器人齒輪機構之應用、機 器人齒輪車(競速與爬坡)、藍芽控制機器人與一些自行設計的機器人 小遊戲等等。 本人在這課程中擔任機器人助教,並在其間學習到了樂高機器人 的結構組裝與設計軟體控制,陪伴著小至大班大至大學的學生,排除 過各式各樣的問題,且在過程中瞭解到了一些小朋友因為課程的安 排,一步一步的啟發了他們對程式與組裝的知識。看到他們對何世偉 教授安排的機器人課程的熱衷,讓我更努力的去學習樂高。也就因此 讓我想到了樂高機器人中缺乏了一些對於擷取生理訊號方面的感測 器。 人體中有很多的生理訊號,包含有心電圖、肌電圖、腦波訊號和 眼動圖等等,這些訊號可反映出生理或者心理方面的正常與異常。當 這些生理訊號感測器融入樂高機器人中,使人可得到更有效率的照 護,也讓樂高機器人應用於教育讓人更想要去瞭解這方面的知識與功 用,樂高機器人也將與人更親近變得更有趣。
因為這個想法,讓我投入研究開發脈動感測器來融入樂高機器人 系統,讓樂高機器人用機械、控制與生理訊號結合。希望未來可開發 更多有關擷取生理訊號的感測器。
第二
第二
第二
第二章
章
章
章、
、
、
、設備介紹
設備介紹
設備介紹
設備介紹
2-1 硬體介紹硬體介紹硬體介紹 硬體介紹 2-1-1 ARM7 微處理器微處理器微處理器 微處理器 LEGO公司所研發的NXT,其模組化的優勢所有套件皆有標準規 格,且使用簡易是一套相當易於上手的機器人系統,本研究的硬體部 分採用LEGO Mindstorms NXT 9797,內含積木數431個、可程式控制 電腦主機、USB 傳輸線、光感測器、超音波感測器、音源感測器、 觸控感測器、互動式伺服馬達。以及擴充零組件9648,內含積木數672 個。此外還使用自行設計的脈動感測器,此感測器的特色在於體積 小,而且只要手指碰觸就可以擷取到心跳的訊號。 這 款 樂 高 機 器 人 採 用 了 32 位 元 微 處 理 器 、 內 建 USB 和 藍 芽,可 以 讓 使 用 者 做 出 透 過 藍 芽 裝 置 控 制 的 機 器 人。NXT 內 附 的 程 式 編 輯 工 具 支 援 PC 和 Mac, 為 了 吸 引 更 多 玩 家 參 與 擴 充 與 改 造 NXT,樂 高 公 司 特 別 發 表 了 開 放 原 始 碼 的 韌 體 和 開 發 工 具 , 就 連 微 軟 都 忍 不 住 加 入 機 器 人 開 發 軟 體 的 行 列 , 推 出Microsoft Robotics Studio 軟 體,美 國 的 卡 內 基 大 學 也 針 對 此 硬
上 所 需 數 據 即 可 控 制 NXT。 除 了 主 機 功 能 大 幅 增 強 , NXT 的 馬 達 也 改 採 伺 服 控 制,能 讓 程 式 精 確 地 調 整 速 度;為 了 增 加 功 能 性 感 測 器 也 變 得 多 樣:超 音 波 感 應 器( 大 多 用 於 感 應 障 礙 物 ) 與 能 夠 辯 識 顏 色 和 亮 度 的 光 線 感 應 器 …等 等 。 如 圖 2-1。 圖 2-1 ARM7 微處理器與感測器 表 2-1 是 ARM7 微處理器的硬體規格。其內部主要的處理器 為 Hitachi H8 系列的微電腦處理器,可以將寫好的程式透過 USB 或者藍芽傳輸裝置將程式輸入至處理器內再使用 NXT 執行程 式,其主要電力來源為 6 顆 3 號電池,但由於此處理器還搭載其 他相關硬體所以當電力低於 6.7 伏特即會顯示沒電狀態。
ARM7 微處理器 微處理器 32 位元 ARM 處理器 記憶體:256Kb FLASH,64Kb RAM 輔助處理器 8 位元 AVR 處理器 記憶體:24Kb FLASH,512Byte RAM 通訊方式 藍芽無線傳輸(Bluetooth Class II V2.0)與 USB(12Mbit/s) 輸入端 4 個連接端(可連接觸控、聲音、光和超音波感測器) 輸出端 3 個連接端(可連接 3 個馬達) 顯示設備 100X64 像素液晶顯示面板 聲音輸出 音效品質 8KHz;8 位元解析聲音頻道,2-16KHz 取 樣頻率 電池 3 號電池×6 or 專用鋰電池 表 2-1 ARM7 微處理器硬體規格 2-1-2 Bluetooth 介紹介紹介紹 介紹 Bluetooth如果從英文字面翻譯為「藍牙」,但是為了強調這項通訊 技術及其應用方面正處於「萌芽」的階段,所以中文翻譯取名為「藍 芽」。「藍芽」(Bluetooth) 是一種無線通訊技術,這技術的主要目的
是提供各種電子設備(行動電話,PDA,家電,筆電,…) 之間的距離為10 至100 公尺,進行數位資料的無線傳輸,也就是說不需要任何有形的 線路將它們串在一起,就可以建立一套無線個人區域網路(Personal Area Network)。 2-1-2-1 藍芽通訊系統的特性與目的藍芽通訊系統的特性與目的藍芽通訊系統的特性與目的 藍芽通訊系統的特性與目的 藍芽通訊協定是近年來相當受矚目的無線短程通訊技術之一。主 要目標是要提供一個可在全球通行無礙的無線傳輸環境,除了取代有 線外,也以能使不同的廠商所製造的設備具有互通性為目的。這包括 許多的電子產品與行動裝置,使這些設備能利用藍芽的無線傳輸各種 的資料型態的能力,來達到互相連結的目的。Bluetooth 無 線 傳 輸 的 媒 介 是 無 線 電 波,所 以 藍 芽 技 術 最 大 的 特 性 是 在 其 傳 送 端 與 接 收 端 的 資 料 連 線 上,沒 有 所 謂 方 向 性 的 限 制( 全 方 位 傳 輸 ), 並 且 能 夠 穿 透 障 礙 物( 牆 壁、衣 服 口 袋、公 事 包 等 )做 資 料 或 聲 音 的 多 點 傳 輸 ( 最 多 一 對 七 ), 其 資 料 有 效 傳 輸 距 離 大 約 在 50公 尺 左 右,在 資 料 傳 輸 期 間,傳 送 端 與 接 收 端 還 可 移 動 位 置。 2-1-2-2 藍芽的技術理論藍芽的技術理論藍芽的技術理論 藍芽的技術理論 藍芽規定主動要求連線的裝置為藍芽主裝置(Bluetooth Master),
而被要求連線者為藍芽從屬裝置(Bluetooth Slave)。 當藍芽裝置開機後便處在Standby 模式,接著透過Inquiry 程序來 得知附近是否有可供連線的藍芽裝置,然後藉由Page 程序來連結特 定的藍芽裝置以進入Connected 模式。另一方面,藍芽裝置亦可依需 求進入不同的省電模式。Bluetooth 的 資 料 傳 輸 是 屬 全 方 位 性 的,且 Bluetooth本 身 有 內 建 安 全 機 制,在 資 料 傳 輸 前 會 先 作 所 謂 認 證 的 工 作,同 時 資 料 在 傳 送 時 也 有 加 密 機 制,以 防 資 料 被 中 途 竊 取 。 2-1-2-3 藍芽技術優劣區分藍芽技術優劣區分藍芽技術優劣區分 藍芽技術優劣區分 藍芽技術優勢:晶片成本較低:對無線通訊裝置使用的晶片而 言,單一晶片(One Chipset)為降低成本的主要方法,相較於IEEE 802.11 及Hone RF 而言,將藍芽晶片製成單一晶片的門檻較低。因 為藍芽為一種短距離的傳輸技術,所消耗的電力較小(發信時 20~30mW,待機時則低於0.3Mw),且最低收訊靈敏度,僅僅-70dBm, 故單一晶片技術製作較其它系統容易。通訊頻帶最一般化:藍芽傳輸 使用不須額外申請許可的2.4GHz ISM 頻帶,故通訊頻帶最一般化, 且在全世界幾乎皆可通,故較易製造此收發通信模組,大大地增加藍 芽的發展性。
藍芽技術劣勢:易受其它頻率干擾:在一般家用電器中,有些產 品的電波頻率與 2.4GHz 相近,根 據 目 前 數 據 得 知,其 跟 微 波 爐 、
802.11b 規 格 的 裝 置 等 是 同 屬 相 同 ISM 頻 段 ( Industrial Scientific Medical Band: 此 頻 段 主 要 是 開 放 給 工 業 、 科 學 及 醫
學 三 個 主 要 機 構 使 用 ) 2.4GHz 的 高 頻 率 範 圍 , 所 以 使 用 上 這 些 裝 置 應 儘 量 彼 此 互 相 避 開 , 以 免 產 生 干 擾 。 雖然針對此一困 難,藍芽將整個頻寬範圍割成 79 個頻道,並使用每秒跳躍 1600 次 的頻道跳躍技術,只要某一頻率遇到干擾立刻會切換到另一頻道。但 是如果無線電波頻率過多,難保仍會有相互干擾的問題。傳輸速度 慢:藍芽為無線通訊的網路傳輸技術,因此對於建構一個良好的區域 網路可能有著速度上的問題。藍芽系統的主機最多可連接 7 台從屬 裝置,最高傳輸速度為 712kbps。但事實上可能僅達 200~400kbps, 相對於目前有線環境(LAN)下 10/100Mbps 的傳輸速率還有不小的差 距。如果此些劣勢無法在未來解決,可能造成藍芽的應用僅僅為短距 離的傳輸。 2-1-3 脈動感測元件介紹脈動感測元件介紹脈動感測元件介紹脈動感測元件介紹 下列為自製脈動感測器的主要原件及電路圖形(圖 2-2 至圖 2-8), 並說明有關於脈動感測器的生理原理。
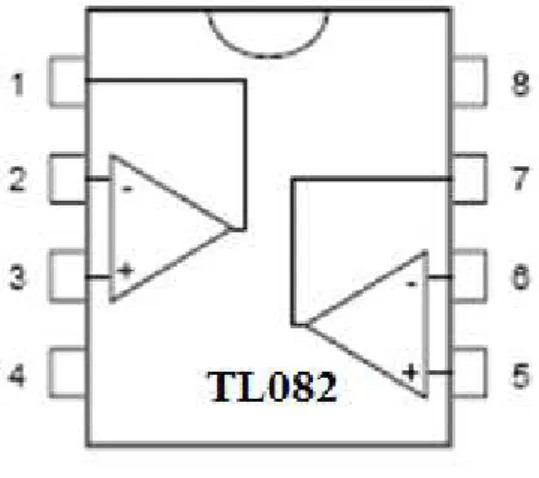
1. 光耦合器(圖 2-2):利用 CL-ICL3(發光二極體)和 ST-23G(光 電晶體),接收微弱訊號。 圖 2-2 光耦合器電路圖 圖 2-3 自製脈動感測元件(紅線框為光耦合器) 2. TL082(圖 2-4):第一腳為置零調整用。第二腳為反向輸入。 第三腳為非反向輸入。第四腳為電源負端。第五腳為非反向輸 入。第六腳為反向輸入。第七腳為置零調整用。第八腳為電源正
圖 2-4 TL082 接腳圖 圖 2-5 自製脈動感測元件(紅線框為 TL082) 3. LM741(圖 2-6):LM741 是常用的放大器,第一腳為置零調整 用。第二腳為反向輸入。第三腳為非反向輸入。第四腳為電源負端。 第五腳為置零調整用。第六腳為輸出端。第七腳為電源正端。第八腳 為空腳。
圖 2-6 LM741 接腳圖
圖 2-8 光容積電路圖 生理原理: 由於循環系統的心臟分左心室(房)和右心室(房)。而右心室將血液 打到肺裡,並在肺中進行氧和二氧化碳的互換,然後再將帶含有氧之 血液至左心房後,經左心室再將血液打入主動脈中,運送至全身動 脈,然後動脈在分許多細小之血管,而最小的血管稱之為微血管。 微血管是一種極小的血管,在人體任何時候,只有 5%的循環血 液是在微血管內,但這 5%的血液可通過全身的微血管壁,氧氣和營 養物質使能進入細胞內,二氧化碳和廢棄物則進入血液,最後血液進 入靜脈,再流入靜脈系統,經由上腔及下腔靜脈流回右心房,完成體 循環。動脈系統具有壓力儲存的功能,血液從心臟打入動脈,進而分
支流入微血管,來自自主神經系統的訊號控制小血管上的括約肌,用 這種方式來調控身體各部分的血流,流到特定器官的血流也受局部區 域的狀況影響。例如細胞因為 PH 值降低,氧濃度減少,或二氧化碳 濃度增加時,便表示需要更多的血流,此時部分血管的括約肌便會舒 張,讓較多的血流進入微血管中。而運動和靜止狀態下特定器官的血 流分佈有很大的不同,運動時流往皮膚和腸胃道的血流會減少,而流 往骨骼肌的血流量會增加,同時心輸出量也會增加。 微血管因受到心臟收縮、舒張的作用,其血液容積也會跟隨著改 變,最簡單的方法是利用光容積變化描記(Photoplethysmogram)。光 容積變化描記放大器測量模組,所測量到的是血管內血液的體積變化 波型,若將此訊號微分則代表血液流量太小。
2-2 軟體介紹軟體介紹軟體介紹 軟體介紹
2-2-1 Labview 介紹介紹介紹介紹
LabVIEW(Laboratory Virtual Instrument Engineering Workbench,
圖控程式語言),由美商國家儀器股份有限公司(National Instruments, 簡稱NI 公司)所研發,該軟體的呈現方式與運作是以模擬實際方式 的情況, 所以LabVIEW 程式一般稱為虛擬儀表(virtual instruments ,VI)。 此圖形化程式介面相較於文字指令型態的程式撰寫方式,對於工 程師或科學家的程式撰寫經驗中,是一種更具直覺的程式設計方式。 直覺式的圖形化程式設計圖示讓使用者很快且輕易地上手。使用者可 以透過交互式面板、對話框、選單以及數百種虛擬儀表(Virtual Instruments,簡稱為VI)來達成所有的功能,也可以將這些VI 置於 圖框中,來定義使用者想要執行的動作。在此利用一個例題來說明。
1. 電腦主機端開始選擇連線方式並輸入ARM7微處理器的名
稱。
圖2-9 自製LabView程式(傳輸端)
2. 電腦主機與ARM7微處理器進行藍芽配對。
3. 電腦主機與ARM7微處理器連線配對成功。
圖2-11 自製LabView程式(傳輸端)
4. 輸入你所要顯示在ARM7微處理器上的文字。
5. 輸入的文字將傳送到移位暫存器,當這一筆資料進入時會
附蓋前一筆資料。
圖2-13 自製LabView程式(傳輸端)
6. 等待指令將資料利用藍芽傳送出去。
7. 按下send鈕即傳送到ARM7微處理機接收端。
圖2-15 自製LabView程式(傳輸端)
8. 也可傳送要發出的聲音到ARM7微處理器。
9. 如LEGO.rso,傳送到ARM7微處理器及發出LEGO的聲
音。(*****.rso 為ARM7微處理器內建的聲音副檔名。)
圖2-17 自製LabView程式(傳輸端)
10. Stop button顧名思義為停止按鈕。
11. 當按下停止鈕後,電腦主機與ARM7微處理器將連線中
斷。
圖2-19 自製LabView程式(傳輸端)
12. ARM7微處理器開始搜尋並接收資料。
13. 然後顯示在ARM7微處理器的螢幕上。
圖2-21 自製LabView程式(接收端)
2-2-2 NXT-G介紹介紹介紹 介紹
利用一個採礦車例題解說。
圖2-23 自行設計之例題圖形
1. 此LOOP功能是讓包覆在裡面程式無限止的運作。
2. B、C馬達選Unlimited (以力量75) 。
圖2-25 自製NXT-G程式
4. B、C馬達停止。
圖2-27 自製NXT-G程式
5. 將A馬達正轉620度(以力量75);A馬達為負責轉動超音波感測器之
馬達。
6. 此超音波感測器(PORT 4) 為讀取一個距離(無等待之特性);數值
大小並不影響其讀取距離。
圖2-29 自製NXT-G程式
7. 將前一超音波感測器所讀取之數值轉化成文字。
8. 將文字顯示在NXT之螢幕上的區域。
圖2-31 自製NXT-G程式
9. 將A馬達逆轉1240度(以力量75) 。
10. 此超音波感測器(PORT 4) 為讀取一個距離(無等待之特性);數值
大小並不影響其讀取距離。
圖2-33 自製NXT-G程式
11. 將前一超音波感測器所讀取之數值轉化成文字。
12. 將文字顯示在NXT之螢幕上的區域。
圖2-35 自製NXT-G程式
13. 將A馬達正轉620度(以力量75) 。
14. 將超音波感測器所讀取到的左右兩方之數值做比較。
圖2-37 自製NXT-G程式
15. 比較完之數值如左方大於右方,則執行上方程式,反之則執行下
16. B、C馬達往B馬達方向右轉720度 (以力量75) 。
圖2-39 自製NXT-G程式
17. B、C馬達往C馬達方向左轉720度 (以力量75) 。
第三章
第三章
第三章
第三章、
、
、
、研究方法
研究方法
研究方法
研究方法
3-1 研究目的研究目的研究目的 研究目的 本論文希望可以研發出一套擷取人體心跳(心搏)生理訊號的感測 器,透過樂高機器人系統中的 ARM7 微處理器,將生理的類比訊號 轉為數位的訊號,並利用 ARM7 微處理器中的藍芽傳輸設備,將訊 號傳至遠端的伺服器。機器人系統則需使用各種感測器來代替人類的 各種五官感覺所能判斷出的意外,所以感測器的製作及研發實為本系 統的一大重點。 首先可透過溫度感測器來監測患者的體溫及室溫,畢竟體溫的變 化是許多疾病的徵兆,若有此感測器可以觀察患者的身體狀況以及體 溫變化避免延誤就醫。而電壓感測器其製作目的為因應其它感測器的 類比訊號為電壓,若能使用此感測器即可再外接其它感測器,並且編 輯簡單的數據轉換程式即可以使用,是屬於應用途徑相當廣泛的感測 器。最後則是光容積模組,此感測器搭配使用光發射器及接收器的原 理,其裝置在手指上光發射器會發出紅外線光,經過手指時即反射回 去給光接收器,當人的微血管因脈搏的舒張及收縮所反射的光均不 同,此時光容積模組則可將此數據轉換成 ECG 圖形的數據,以上的 資訊亦可經由程式顯示於 ARM7 微處理器的螢幕上並且透過藍芽將3-2 ARM7 I/O 訊號的校準方式訊號的校準方式訊號的校準方式 訊號的校準方式 本研究利用自製的溫度感測器、電壓感測器和電阻感測器來確認 ARM7 微處理器的精度和校準。 3-2-1 溫度量測的過程方法與精度確認溫度量測的過程方法與精度確認溫度量測的過程方法與精度確認溫度量測的過程方法與精度確認 溫度的量測是現今很常使用的感測器之ㄧ,其感測器的原理是當 溫度產生變化的時候其熱敏電阻的阻抗會隨之改變,負溫度係數
(NTC, Negative Temperature Coefficient)熱敏電阻及正溫度係數(PTC, Positive Temperature Coefficient)熱敏電阻兩種,而本研究則是採用負
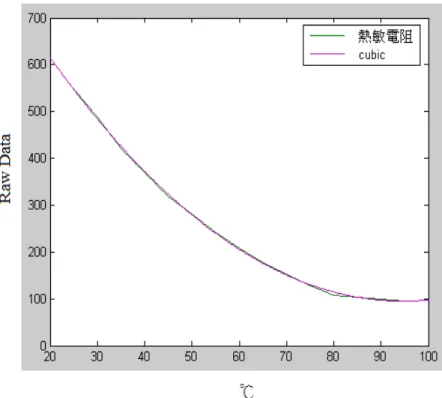
溫度係數熱敏電阻(NTC),故當溫度越高的時候其阻抗越低,相對所 讀取的原始資料(Raw Data)也越低,圖 3-1 為此 NTC 不同溫度對應其
圖 3-1 量測溫度與測量溫度比較圖 可觀察出雖其有溫度越高 Raw Value 越低的特性,且其變化是非 線性的趨勢,所以如果要計算出其轉換成溫度的值其程式: 940 18 1 . 0 10 9 . 2 × 5 3 + 2 − + − = − x x x y 不同溫對其對應的 Ratio 值如圖 3-1 圖 3-2 為本論文所製作出的溫度感測器,需將 NXT 傳輸線中的 TXD 及 RXD 分接出來,再將熱敏電阻接上即可完成,而不同格式的 感測器需依照其規格於程式中作數據轉換,方可準確量測。
圖 3-2 溫度感測器 3-2-2 電壓量測的過程方法與精度確認電壓量測的過程方法與精度確認電壓量測的過程方法與精度確認電壓量測的過程方法與精度確認 下圖 3-3 為電壓感測器,其製作方式亦須將 NXT 傳輸線中的 TXD 及 RXD 分接出來,並且依照需求來加裝電阻,即可控制傳輸到 NXT 裡的類比電壓資料,再透過程式作數據轉換即可達到電壓量測的目 的。
圖 3-3 電壓感測器 沒處理過的原始資料(RAW DATA),原始資料顯示的範圍為 0~1023,而 NXT 所讀到的類比資料為 0~5V,故若想將此感測器資料 轉換成溫度需要透過下列運算式:
[ ]
2 1 5 1023 Raw E= − V [ ]
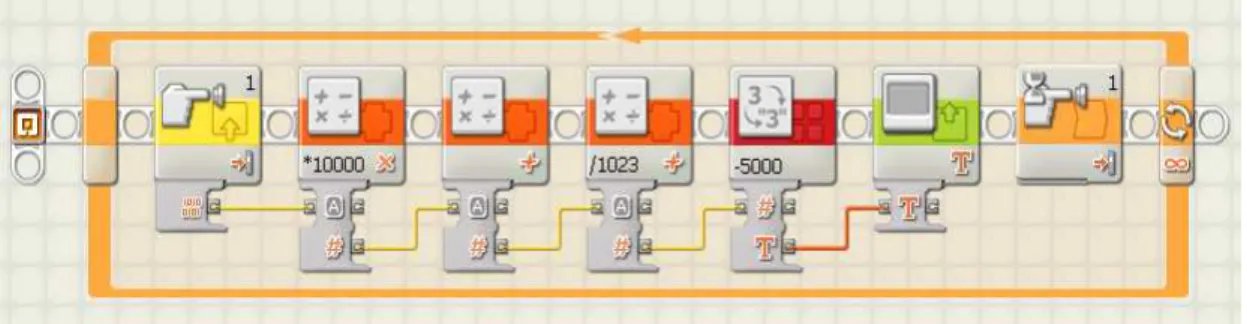
10000 5000 1023 Raw E = − mV 而且其 NXT-G 程式編輯的方式如圖 3-4,一開始採用任一 sensor 量測指令,並擷取其 Raw Data 的資料將其乘以 10000 並除上 1023 後 再減掉 5000,將此數據透過轉換成為文字資料後顯示在螢幕上,圖3-5 為此程式顯示出的數據,其顯示 2521 亦即代表 2521mV。
圖 3-4 NXT-G 程式編輯(電壓)
圖 3-5 NXT-G 螢幕顯示數據
3-2-3 電阻量測的過程方法與精度確認電阻量測的過程方法與精度確認電阻量測的過程方法與精度確認電阻量測的過程方法與精度確認
裡的類比電壓資料,再透過程式作數據轉換即可達到電阻量測的目 的。 圖 3-6 電阻感測器 沒處理過的原始資料(RAW DATA),原始資料顯示的範圍為 0~1023,而 NXT 所讀到的類比資料為 0~5V,故若想將此感測器資料 轉換成電阻需要透過下列運算式: ] [ 1023 10000 Ω − = Raw Raw R 而且其 NXT-G 程式編輯的方式如圖 3-7,一開始採用任一 sensor 量測指令,先以 1023 減掉擷取其 Raw Data 的值為除數,再擷取其 Raw Data 的值將其乘以 10000 為被除數,兩數相除後,將此數據透
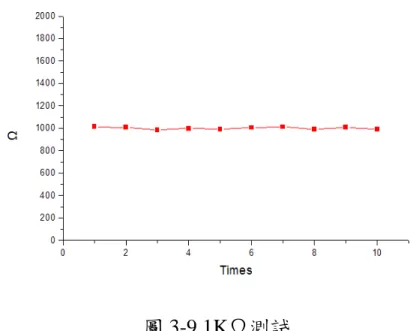
過轉換成為文字資料後顯示在螢幕上,最後開關(Touch Sensor)來決定 是否要再量測一次。下圖 3-8 和圖 3-9 為此程式量測十次顯示出的數 據,其顯示量測值與測量非常之接近,所以 ARM7 為處理器是相當 準確的。 圖 3-7 NXT-G 程式編輯(電阻) 圖 3-8 100Ω測試
3-3 脈動感測器的製作脈動感測器的製作脈動感測器的製作 脈動感測器的製作
光耦合器 高通濾波器 反相放大器 低通濾波器
微分器 反相器 放大器 比較器 圖 3-10 自製脈動感測器
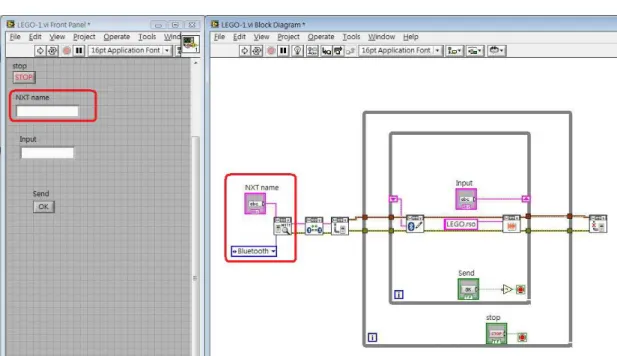
3-3-1 Labview 程式解說程式解說程式解說程式解說 3-3-1-1 搜尋目標搜尋目標搜尋目標 搜尋目標 首先利用藍芽搜尋名為 Aaron 的 ARM7 微處理器。 圖 3-11 自製 LabView 無線傳輸程式 3-3-1-2 連線配對連線配對連線配對 連線配對 當搜尋到 ARM7 微處理器時,先查詢他是否有與別的藍芽模組連 線,如果有連線時將到 Ture 迴圈裡並且中斷藍芽連線,並重新查詢 連線,如果沒有連線即為 False 迴圈,那就直接查詢連線。
圖 3-12 自製 LabView 無線傳輸程式 圖 3-13 自製 LabView 無線傳輸程式 3-3-1-3 資料傳輸資料傳輸資料傳輸 資料傳輸 連線成功後,經由 ARM7 微處理器讀取的 Data,運算過後傳送脈 動波形與轉換後的文字至電腦主機的螢幕。如按下 stop 鈕即停止程 式,並且中斷電腦主機與 ARM7 微處理機的連線。
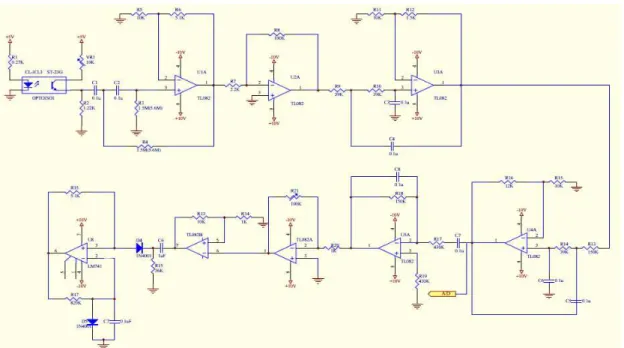
3-3-2 電路圖形解說電路圖形解說電路圖形解說電路圖形解說 3-3-2-1 光耦合器偏壓電路光耦合器偏壓電路光耦合器偏壓電路 光耦合器偏壓電路 紅外線光耦合器包含有紅外線發光二極體及光電晶體,當皮膚同 時接觸光耦合器時,由於微血管內流量的變化,而改變了組織的結 構,使得紅外光在穿過組織時反射回來的量受到不同程度的影響,因 此可藉由光接收器獲得這樣微弱的訊號變化量。 圖 3-15 PPG 電路圖形
3-3-2-2 高通濾波器高通濾波器高通濾波器 高通濾波器 去除手指晃動所造成的漂移電壓或光耦合器的直流偏壓。 圖 3-16 PPG 電路圖形 3-3-2-3 反相放大器反相放大器反相放大器 反相放大器 將訊號放大以使傳至下一級檢測而不至於失真,此放大器為反相 放大器,約放大五十倍。
圖 3-17 PPG 電路圖形
3-3-2-4 低通濾波器低通濾波器低通濾波器 低通濾波器
3-3-2-5 微分器微分器微分器 微分器 將前一級訊號的波形變化加大,便於觀察測量。 圖 3-19 PPG 電路圖形 3-3-2-6 反向器反向器反向器 反向器 由於微分器造成訊號相位一百八十度的改變,因此需經一反相 器。
圖 3-20 PPG 電路圖形
3-3-2-7 放大器放大器放大器 放大器
此為正相放大器,約放大十倍。
3-3-2-8 比較器比較器比較器 比較器 以 D5 的導通電壓為參考電位,可避免動脈脈瓣關閉時,所造成 血壓上的一次反射波形而產生錯誤的觸發。D4 為箝位比較器輸入電 壓,避免比較器累積較多電荷而造成不可正常動作。 圖 3-22 PPG 電路圖形 3-3-3 脈動感測元件實驗過程脈動感測元件實驗過程脈動感測元件實驗過程脈動感測元件實驗過程 如圖 3-23,是本研究訊號處理的流程圖,主要目的是希望將人身 體裡的生理訊號透過脈動感測器擷取出來,再透過本研究時做出來的 電路圖轉換出來的數位訊號,並且將此訊號傳入 ARM7 微處理器中, 再透過藍芽傳輸到遠端伺服器。
圖 3-23 訊號流程圖 圖 3-24 是本研究的成果,裡頭可以清楚的看到,利用脈動感測元 件將生理訊號擷取了之後,透過示波器顯示出圖形,另一方面也將此 訊號透過 NXT 自製程式將訊號傳送到 ARM7 微處理器,並且將此訊 號顯示在 ARM7 微處理器的螢幕上,最後透過 ARM7 微處理器的藍 芽將此訊號送至遠端伺服器。 圖 3-24 同步顯示
第四
第四
第四
第四章
章
章、
章
、
、實驗結果與討論
、
實驗結果與討論
實驗結果與討論
實驗結果與討論
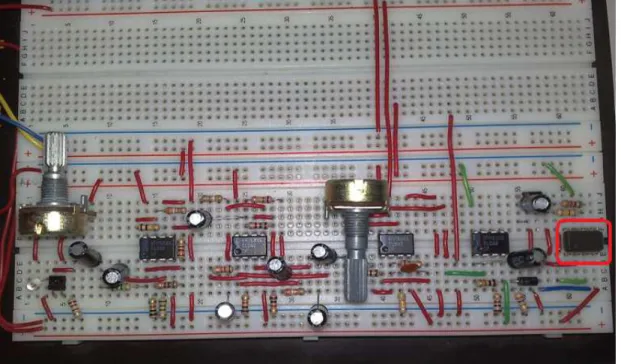
4-1 實驗結果實驗結果實驗結果 實驗結果 在本章節介紹心電圖模擬的使用方法,首先為了求證電路設計與 訊號傳輸的正確性與否,先將電路圖轉化為電路板,再經由ARM7微 處理器的藍芽傳輸系統,將資料傳輸至電腦並且經由LabView程式所 編輯的運算及顯示方式同步運作。實驗一設計電路如圖 4-1所示。 圖4-1 PPG電路圖4-1-1 心電圖測試程序心電圖測試程序心電圖測試程序心電圖測試程序 依據上述之電路圖模型將其實際排列成電路板模式,之後按照心 電圖所註明+10v電源與IC驅動電源使用電源供應器輸出電壓在將示 波器接至訊號輸出點位,測試訊號有無輸出及是否正確,沒問題即完 成心電圖電路板。 圖4-2 PPG電路
圖4-3 測試完成圖 4-1-2 藍芽傳輸測試藍芽傳輸測試藍芽傳輸測試藍芽傳輸測試 在前面第三章節已介紹過 NXT-G 程式編輯及 ARM7 微處理器的 使用方法、藍芽傳輸方式與 LabView 程式內容,為了求證系統設計假 設與數據傳輸的穩定性正確與否,直接讓 ARM7 微處理器接線將心 電圖電路所取得之訊號,透過藍芽將資料作輸出與接收,再送至電腦 上,經過 LabView 程式轉化訊號後利用 LabView 之 Waveform Chart, 將實驗波形與示波器所顯示波形比較兩者是否相同。
圖4-4 示波器圖形與LabView顯示之波型比較
4-1-3 實驗完成圖實驗完成圖實驗完成圖實驗完成圖
圖 4-5 示波器、ARM7 微處理器與遠端伺服器,皆有同步顯示出 我所量測到的生理訊號。
4-2 討論討論討論 討論 1. 利用自製化的傳輸設備,成功的將已知的電壓和電阻訊號輸入 NXT 系統,排除一定要使用 LEGO 公司訂製的傳輸線,方便未來開 發新型的 sensor 訊號可自由的利用 NXT 系統作業。 2. LEGO 公司發展的 Mindstorms NXT9797 機器人系統包含積木 數 431 個、可程式控制電腦主機、USB 傳輸線、光感測器、超音波 感測器、音源感測器、觸控感測器、互動式伺服馬達。在機器人的出 其啟蒙教育與機器人開發設計上扮演重要角色,原因在於其模組化的 元件,包含不同的感應 sensor,使得其具備無線的想像及開發的優勢, 但在這些物理 sensor 中(超音波、光、音源和觸控感測器),唯獨缺少 生理訊號的感測元件,此為 LEGO 積木美中不足的地方。 3. 本研究成功的將一個生理訊號(PPG)傳至 NXT 系統做處理,並 將訊號利用 NXT 系統中的藍芽功能傳出至遠端伺服端,其意義為可 以成功的整合 NXT 系統,將生理的訊號加以利用,未來可做為 LEGO 發展生理感測元件的基礎。
第五章
第五章
第五章
第五章、
、
、
、未來研究方向
未來研究方向
未來研究方向
未來研究方向
這樣的思維與嘗試,可以將機器人系統與人體的生理訊號連結, 未來可能在 LEGO 的機器人系統中發展出多樣的生理感測元件,可以 包含心電圖、肌電圖、腦波訊號和眼動圖等生理訊號,可發展與人更 為互動親密的機器人,這樣的機器人具備 (a) 更有趣(使小朋友藉此了解生理訊號的意義)。 (b) 更具發展潛力(利用生理訊號控制機器人)。 (c) 結合工程(機器人)與生理(原理),可能發展對人類照顧與醫 療更有用的機器人系統。參考文獻 參考文獻參考文獻 參考文獻 [1]林宗翰,“一個整合心電圖壓縮與錯誤保護之機制及其在居家照 護系統中藍芽傳輸之應用”,中原大學電子工程學系碩士學位論 文,2004 年 6 月。 [2] 葉春甫,“以 PDA 為基礎知居家看護系統”,國立台灣大學電 機工程研究所碩士論文,2002 年 6 月。 [3]李皖琦,“以 PDA 及 FPAA 為基礎之多功能生理測量模組”,國 立台灣大學電機工程研究所碩士論文,2003 年 6 月。 [4]李大昌,“利用藍芽實現無線生理監控系統”,國立中正大學工 學院通訊工程研究所碩士論文,2005 年 1 月。 [5]涂清源,“建構無線傳輸與網際網路之居家看護系統”,私立中 原大學醫學工程學系碩士學位論文,2002 年 7 月 18 日。 [6]黃煜展,“情境感知氣喘居家看護系統之研製”,國立台北護理 學院資訊管理研究所碩士論文,2009 年 7 月 14 日。 [7]賴致平,“PDA 藍芽技術應用”,大華技術學院機電工程研究所 碩士論文,2007 年 8 月。 [8]李文璞,“OPC 應用於 LabVIEW 遠端設備監控之研究”,大葉 大學機械工程研究所碩士班碩士論文,2005 年 6 月。 [9]林治中,“以 Java 開發自動化系統之人機介面”,國立中山大學
機械與機電工程所碩士論文,2002 年 6 月。
[10]王志浩,“以 RFID 定位的室內機器人管理系統”,南台科技大學

![圖 3-3 電壓感測器 沒處理過的原始資料(RAW DATA),原始資料顯示的範圍為 0~1023,而 NXT 所讀到的類比資料為 0~5V,故若想將此感測器資料 轉換成溫度需要透過下列運算式: [ ]21 5 1023 RawE= − V [ ]100005000 1023 RawE= − mV 而且其 NXT-G 程式編輯的方式如圖 3-4,一開始採用任一 sensor 量測指令,並擷取其 Raw Data 的資料將其乘以 10000 並除上 1023 後 再減掉 5000,將此](https://thumb-ap.123doks.com/thumbv2/9libinfo/7270783.69502/47.892.209.687.108.614/成溫度需要透過下列運算式RawE−VRawE=而且將此.webp)