以相對運動法進行科氏效應之視覺化模擬
徐以帆
*谷岳峰 曾靖夫
臺北市立建國高級中學 *通訊作者:[email protected] (投稿日期:108 年 8 月 17 日,接受日期:108 年 12 月 25 日) 摘要:科氏效應是中學生較難以理解的古典力學觀念,因此本研究避開微積分的 計算,僅利用慣性座標系中的牛頓運動定律,配合相對運動的觀念,以數值方法 視覺化地模擬科氏效應。首先,於慣性座標系中計算物體運動,再將觀察者視角 轉換至非慣性座標系中,即利用相對運動的觀念將物體運動投影至非慣性座標系, 如此,不須計算假想力的作用,位於非慣性座標系中的觀察者即可直接觀察到科 氏效應及各種假想力自然呈現。本研究以上述方法利用 Python 進行視覺化模擬, 開發出四個模擬程式,包含平面上及球體上的假想力模擬,例如:地球上的長程 砲彈及傅科擺之運動分析,避免了現實中實驗不易且通常只能進行小規模實驗的 困難。本研究亦將此方法模擬之結果分別和真實數據及套用假想力公式計算之結 果進行比較,以確認其正確性。另外,我們發現:教科書中對科氏效應影響地表 氣旋的示意圖過度簡化,若教師補充說明不足,可能造成學生誤會。最後,本研 究將模擬程式原始碼開放給有興趣的學生及教師,希望能幫助同學們理解科氏效 應的概念。 關鍵詞:科氏力、相對運動、假想力、傅科擺、電腦模擬壹、 簡介
多數學生首次接觸「科氏力」的概念是在國中的地科課程中,為了解釋行星風系,課本 簡略帶過其現象,但通常未詳細說明其原理,雖然多數學生都能在稍加思考後了解南北向運 動會受科氏力影響的原因,但對於東西向運動之物體的偏轉則難以想像,想進行球面上的科 氏力實驗又相當困難,教師往往無法提供學生有說服力的解答。高中課程中,雖有提及影響 科氏力的因素[1](如:轉速、緯度等),並以切線速度因旋轉半徑不同而變化解釋徑向運動 中科氏力的影響,但對於切向方向運動的影響,仍然只以「類推」帶過,未加以說明。此外, 網路上的資料莫衷一是[2][3],無法解答學生的疑惑,故我們決定嘗試模擬科氏效應的相關現 象,期望藉此釐清科氏力的觀念,也希望日後可以幫助更多學生及老師。 10.6212/CPE.202007_21(1).0002.科氏力實為一種假想力,而假想力即是為了使非慣性座標系中的物體運動能符合牛頓力 學在慣性座標系中的討論而引入之作用力,對於尚未熟悉向量及微積分運算的中學生而言, 雖能以實際經驗定性地理解假想力的存在,但對於其量值及計算方式卻難以理解。本研究認 為:若要使學生信服,應建立一套清晰且簡單的視覺化運算模型,讓科氏力的效應自然呈現。 本研究認為此視覺化運算模型需要符合以下條件: 1. 正確性――模型模擬之結果必須符合實際觀測結果,且誤差不得過大。 2. 易懂性――模型中使用之物理定律必須能被一般中學生所理解,避免使用艱深的理論。 3. 方便性――模型之運算時間及操作方式必須符合實際教學場合之使用需求。 本研究利用中學生已學過的物理定律――慣性座標系中的牛頓力學及相對運動的觀念, 進行科氏效應的模擬。首先,在慣性座標系中以基礎的牛頓運動定律計算目標物體的運動情 形,接著若將觀察者視角置於非慣性座標系中,亦即利用相對運動的觀念將物體的運動情形 投影到非慣性座標系中,即可觀察科氏力及其他假想力的各種效應自然呈現,本研究稱此方 法為「相對運動法」,而稱直接使用假想力公式之方法為「公式法」。 本研究依照上述方法開發出四個模擬程式,其特色分別對應前述之條件如下: 1. 正確性――模擬程式能正確模擬科氏效應的各種現象,並且符合真實數據,另外,相對運 動法所得之模擬結果和利用假想力公式所得之模擬結果之間誤差甚小。 2. 易懂性――模擬程式使用中學生已學過之物理方法,簡單易懂,並且物體運動之計算採用 中學生皆能理解之簡單的遞迴關係。 3. 方便性――模擬程式使用安裝簡單、語法易懂的 Python 進行開發,並且輔以 C++進行效 能優化,使用者還可自行設定模擬參數,實驗不同變因對科氏效應的影響。 綜合以上特點,本研究開發之模擬程式能幫助學生們了解科氏力的形成原因,也能協助學生 們理解影響科氏力的各項因素,並且模擬程式也相當便於教師們融入教學課程。
貳、 研究分析
一、 科氏力簡介
科氏力(Coriolis Force,又稱科里奧利力)是一種假想力,是物體慣性在非慣性座標系 內的體現,物體於旋轉座標系內做直線運動時,因為慣性而產生的偏移現象即是科氏力作用 的結果,此現象由法國著名數學家兼物理學家古斯塔夫・科里奧利發現,因而得名。科氏力 和離心力皆屬旋轉坐標系中的假想力,當物體相對旋轉座標系沒有位移時,物體僅受離心力 影響;若有相對位移,則物體受科氏力及離心力影響。引入了科氏力及離心力等假想力後, 科學家得以像處理慣性系中的運動方程一樣簡單地處理旋轉體系中的運動方程。由於地球本 身即是一個旋轉球體,因此在研究風向、海流、飛行器時,都必須考慮科氏力,著名的傅科 擺實驗也是利用這個原理。科氏力的計算公式如下: ⃑ −2𝑚𝜔⃑⃑⃑ × 𝑣⃑ (1) 其中,𝑚為物體質量,𝜔⃑⃑⃑為非慣性座標系相對於慣性座標系之旋轉角速度向量,𝑣⃑為物體相對 旋轉座標系之速度向量。 另外,地球科學中提到的地球自轉偏向力實際上是當物體僅沿地面方向運動時所受科氏 力沿地面方向的分量的量值,其計算公式如下:2𝑚𝜔𝑣 (2) 其中, 為物體所在的緯度值。
二、 研究方法
先前有關科氏力的實際實驗研究,通常僅能進行旋轉平面的測量[4][5],未能解釋最難理 解的球體上之科氏效應,且在實際環境中進行實驗常會有許多無法避免的困難之處或干擾, 如:摩擦力、空氣阻力、測量誤差、實驗耗時太長或實驗地點不方便到達等。為解決此問題, 本研究於程式建構出的理想環境進行模擬,也因此能進行「球體」上科氏效應的相關討論, 幫助學生理解科氏力較為複雜的部份(如:地球上東西向運動所受到的影響)。 以模擬方式進行的研究,則大多直接採用科氏力公式計算其結果[5],未能解決學生的疑 惑。因此本研究採用「相對運動法」進行模擬,並且對照「公式法」之結果。本研究主要使 用 Python 的 VPython 套件作為實現 3D 視覺化的模擬工具,其具有多種圖形、操作可供使用, 相當符合本研究模擬程式的需求,另外,本研究也採用 C++優化程式效能。本研究計畫先模 擬出旋轉平面上,由科氏力所造成之物體運動軌跡變化及單擺週期性變化,再將成果推廣至 旋轉球體(地球)上。三、 模擬工具
本研究利用 VPython 開發模擬程式,它會生成一個三維、座標化的虛擬空間,並提供各 種便利的物件類型及函數用於繪製 3D 圖形及操作物件移動,也支援鍵盤及滑鼠控制,另外 也有繪製圖表的功能,以下說明本研究使用到的重要功能或模擬方式: (一) 座標系 在 VPython 中有一種 frame 物件,可理解為在主座標系中一個具有獨立原點及方向 的新座標系,可將其他物件放入其中,而 frame 的原點在主坐標系中的位置及其方向向 量在主坐標系中的投影皆會被記錄,對 frame 進行諸如旋轉或移動等操作,即是以旋轉 矩陣旋轉其方向向量或移動其原點,此時內部的物件都會一起運動。VPython 也內建在 主坐標系及 frame 之間轉換座標的函數,frame 中的向量𝑣⃑⃑⃑⃑⃑對映主座標系中的向量𝑣𝑓 ⃑⃑⃑⃑⃑之𝑤 投影關係如下: 𝑣𝑓 ⃑⃑⃑⃑⃑ ((𝑣⃑⃑⃑⃑⃑ − 𝑝⃑) ⋅ 𝑥𝑤 ⃑⃑⃑⃑⃑)𝑖⃑ + ((𝑣𝑓 ⃑⃑⃑⃑⃑ − 𝑝⃑) ⋅ 𝑦𝑤 ⃑⃑⃑⃑⃑)𝑗⃑ + ((𝑣𝑓 ⃑⃑⃑⃑⃑ − 𝑝⃑) ⋅ 𝑧𝑤 ⃑⃑⃑⃑)𝑘⃑⃑ (3) 𝑓 𝑣𝑤 ⃑⃑⃑⃑⃑ 𝑝⃑ + 𝑣𝑓𝑥𝑥⃑⃑⃑⃑⃑ + 𝑣𝑓 𝑓𝑦𝑦⃑⃑⃑⃑⃑ + 𝑣𝑓 𝑓𝑧𝑧⃑⃑⃑⃑ (4) 𝑓 其中,𝑝⃑為 frame 的原點在主座標系中的位置,𝑥⃑⃑⃑⃑⃑、𝑦𝑓 ⃑⃑⃑⃑⃑、𝑧𝑓 ⃑⃑⃑⃑為 frame 的方向向量在主座標𝑓 系中的投影。(二) 單擺 本研究將單擺的模擬分為擺錘(ball)及擺線(line)兩部分,且將擺線視為彈力常 數極大之彈簧,其中,擺錘所受拉力(即繩張力)由虎克定律算出。 (三) 鍵盤及滑鼠控制 VPython 內建事件監聽函數,會在接收到鍵盤或滑鼠指令時,執行設計者定義的操 作。
四、 相對運動法
「相對運動法」是先將視角置於慣性座標系中,以基礎的牛頓運動定律計算目標物體的 運動情形,不必考慮任何假想力的作用,接著將視角移至位於非慣性座標系中的觀察者上, 視覺上,觀察者直接觀察目標物體即可「看出」科氏力及其他假想力的各種效應;實際上, 必須採用相對運動的觀念,將目標物體在慣性座標系中的座標、速度、加速度等轉換至非慣 性座標系中,如此才能取得目標物體在非慣性座標系中的運動狀態之數值資料,如:座標、 速度及加速度等,以進一步進行數值分析或繪製軌跡等。綜上所述,本研究採用之「相對運 動法」不須涉及中學生無法完全理解的假想力之計算,而能將假想力產生的效應自然呈現, 符合「易懂性」的要求。為了更具體地說明,本研究以麻省理工學院物理系 Technical Services Group(以下簡稱
TSG)架設之實驗[6](見圖 1)對照本研究建立之模擬環境。「相對運動法」中,「將視角置 於慣性座標系中計算物體運動」對應 TSG 架設之實驗就是將攝影機置於地面支架上(見圖 2 (a)),此時計算物體運動時不須考慮任何假想力的作用,其結果為物體以直線飛出(見圖 3 (a)); 相對地,「將視角移至位於非慣性座標系中的觀察者上」對應 TSG 架設之實驗就是將攝影機 置於旋轉支架上(見圖 2 (b)),此時視野所見之物體仍處於慣性座標系中,且以相同方式運 動,但由於視角的不同,即可觀察到假想力的作用,物體以曲線方式飛出(見圖 3 (b))。 圖 1:TSG 架設之實驗裝置及環境
五、 模擬方法 本研究為避免使用複雜的方程式並提升模型的「易懂性」,模擬時採用較基礎的數值方 法計算慣性座標系中物體的運動方程式,若以之物體受力為F⃑⃑,則可由牛頓第二運動定律: ⃑ 𝑚𝑎⃑ (5) 得到加速度
𝑎
⃑⃑⃑,再帶入以下的關係式: { 𝑎⃑( ) ⃑( ) 𝑣⃑( ) ∫ 𝑎⃑( ) 𝑥⃑( ) ∫ 𝑣⃑( ) (6) 即可得到物體的運動行為,考量到中學生並未熟悉積分的運算,也不了解精準的數值方法, 因此本研究採用簡單的遞迴式求解,其公式如下:{
𝑣⃑( + ) 𝑣⃑( ) + 𝑎⃑( )
𝑥⃑( + ) 𝑥⃑( ) +
⃑⃑( )+ ⃑⃑( + )(7) 其中, 為相當短的時間間隔,其取值影響模擬結果之精細度及電腦之運算量,取值越小, 非慣性座標 慣性座標系 觀察者視角 (a) 觀察者視角在慣性座標系 非慣性座標 慣性座標系 觀察者視角 (b) 觀察者視角在非慣性座標系 圖 2:觀察者視角示意圖 標系 (a) 觀察者視角在慣性座標系 標系 (b) 觀察者視角在非慣性座標系 標系 圖 3:不同觀察者視角看到的運動情形 標系
精細度越高,電腦運算量也越高,提升了「正確性」卻降低了「方便性」,故實際開發程式 時,採用試誤法以在兩項指標間取得平衡,另外,公式(7)之位置遞迴式中,本研究嘗試多種 遞迴方法後,採用此時刻及下一時刻速度之平均進行遞迴,此法可以在不增加過多電腦運算 量的前提下,顯著提高「正確性」。 本研究為取得目標物體相對於非慣性座標系中的觀察者的運動狀態之數值資料,採用相 對運動的觀念,取得慣性座標系中的目標物體在非慣性座標系中的座標、速度、加速度等, 其實作方法如下所述:物體座標的轉換直接採用 VPython 提供之函數,物體速度及加速度則 由不同時刻間之座標計算而得,公式如下:
{
𝑣⃑( )
𝑥⃑( )+𝑥⃑( + ) ⋅𝑎⃑( )
𝑥⃑( )+𝑥⃑( + ) 𝑥⃑( )( )(8) 六、
受力分析
本研究之模擬中,存在兩個主要座標系,分別為以地心(或地面)為原點之慣性座標系, 以及隨著地球(或轉盤)旋轉之非慣性座標系。 對於處在慣性座標系之觀察者而言,物體僅受重力影響,而由於模擬中存在較大尺度的 垂直運動(最大約 1000 km),因此本研究以下式模擬真實地心引力: 𝐺⃑⃑⃑⃑⃑ 𝑚g⃑⃑ −9.8 665𝑚
𝑅 𝑟𝑟̂
(9) 其中,𝑚為物體質量,𝑅為地球半徑,𝑟為物體至地心距離,𝑟̂為地心指向物體之單位向量。 對於處在非慣性座標系之觀察者而言,物體所受合力為重力及假想力,重力之計算方式 和慣性座標系中相同,因位於旋轉座標系而產生之假想力為: 𝑓𝑖𝑐⃑⃑⃑⃑⃑⃑⃑ −𝑚𝜔⃑⃑⃑ × (𝜔⃑⃑⃑ × 𝑟⃑) − 2𝑚𝜔⃑⃑⃑ × 𝑣⃑ − 𝑚
𝑑𝜔⃑⃑⃑⃑ 𝑑× 𝑟⃑
(10) 其中,𝑚為物體質量,𝜔⃑⃑⃑為非慣性座標系相對於慣性座標系之旋轉角速度向量,𝑟⃑為軸心到物 體向量,𝑣⃑為物體相對旋轉座標系之速度向量,右側三項分別為「離心力」、「科氏力」、「歐 拉力」,由於本研究希望模擬的是地球上的現象,角速度為定值,故歐拉力量值為 0。 已知在慣性座標系中的受力僅需要考慮物體所受重力,故以「相對運動法」進行模擬時, 物體受力為: ⃑ 𝑚g⃑⃑ (11) 對於在非慣性座標系中的物體,需引入相關的假想力,故以「公式法」進行模擬時,物 體受力為: ⃑ 𝑚g⃑⃑ − 𝑚𝜔⃑⃑⃑ × (𝜔⃑⃑⃑ × 𝑟⃑) − 2𝑚𝜔⃑⃑⃑ × 𝑣⃑ (12) 本研究會多次引用「公式法」對照「相對運動法」所得的各種數據,並分析兩者之間的 誤差,以確保模擬程式之「正確性」。參、 模擬程式
本研究的模擬程式都分別從兩種座標系模擬物體運動,其一為慣性座標系(見圖 4)(如: 桌面、太陽系),其二為非慣性座標系(見圖 5)(如:轉盤、地球)。 本研究開發之程式基本架構如下: 1. 初始化:創建慣性及非慣性座標系、繪製輸出數據所需圖表、定義相關物理參數、 定義相關函數以及創建目標物體。 2. 設定參數:由使用者設定基本參數,如:單擺擺角、緯度值等,進行實驗模擬。 3. 使用者操作:使用者可即時調整轉速、拋射方向以及切換觀察者所在座標系等。 4. 計算受力:分別用「相對運動法」及「公式法」計算慣性坐標系及非慣性座標系 中物體的受力情形,求得每個物體的瞬時加速度。 5. 計算模擬數值:對每個物體,依照前述遞迴式分別計算其速度及位移,同時旋轉 非慣性座標系。 6. 視覺化輸出:用計算結果更新所有物體的視覺輸出並更新數據圖表。 7. 重複 3.~6. 圖 4:程式中的座標系(平面) 圖 5:程式中的座標系(球面)一、 模擬在旋轉平面上丟球
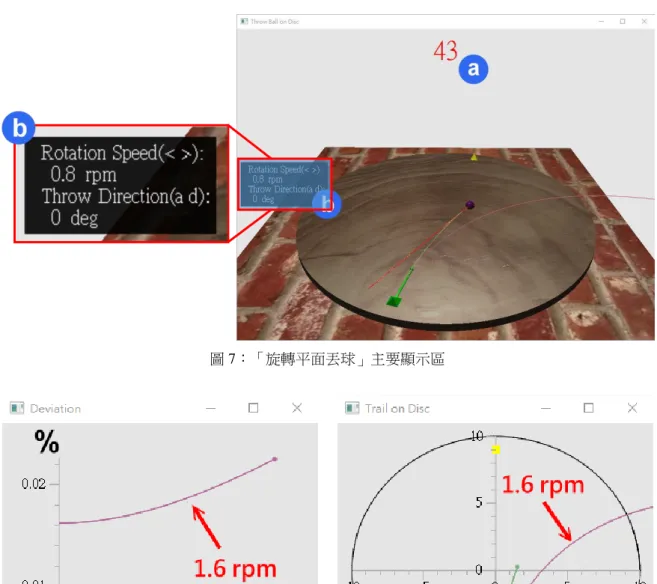
本程式介面包含一個主要顯示區(見圖 7)、誤差圖表(見圖 8)及物體於旋轉座標系 所觀測到的軌跡(見圖 9)。主要顯示區上方(a)數字為程式模擬時間(秒),真實執行時 間 1 秒對應程式模擬時間 1 秒,此程式採用 . 1,因此每秒運算 1000 回;主要顯示區 左方(b)為模擬參數,包含:目前轉盤旋轉速度(rpm)、目前發射方向(度)。本程式採 用單位為公分、秒,圓盤半徑 10 cm,物體初速 5 cm/s,物體飛行 5 秒或距圓心超過 5 倍圓 盤半徑後自動清除。此程式中的誤差定義為: D 相對運動法和公式法的距離 相對運動法已移動的路徑長× 1 % 誤差圖表之橫軸為時間,縱軸為誤差百分比,誤差的大小及成因分析將在後續討論。使用者 也能以鍵盤及滑鼠進行操作(見表 1)。 程式中,藍色物體為「公式法」之結果;其他色彩物體為「相對運動法」之結果,並且 誤差圖表及軌跡圖表中的曲線顏色和所代表的物體顏色相同,以示區別。 按下滑鼠後,慣性座標系中的物體(彩色物體)從起始點(綠色金字塔)發射,具有初 速度: 𝑣 ⃑⃑⃑⃑⃑( ) ⃑⃑ + 𝜔⃑⃑⃑ × 𝑟⃑ 其中, ⃑⃑為使用者自行設定的發射速度向量,𝜔⃑⃑⃑為旋轉平面相對於慣性座標系旋轉之角速度向 量,𝑟⃑為軸心指向起始點之向量,之後此物體不受任何力作用,其加速度為: 𝑎 ⃑⃑⃑⃑⃑( ) ⃑⃑ 而在非慣性座標系中的物體(藍色物體)從起始點發射,則具有初速度: 𝑣 ⃑⃑⃑⃑⃑( ) ⃑⃑⃑⃑ 其中, ⃑⃑⃑⃑為使用者自行設定的發射速度向量於非慣性座標系中的投影,之後此物體受假想力 作用,假想力由公式(10)計算而得,物體加速度為: 𝑎 ⃑⃑⃑⃑⃑( ) −𝜔⃑⃑⃑ × (𝜔⃑⃑⃑ × 𝑥⃑⃑⃑⃑⃑( )) − 2𝜔⃑⃑⃑ × 𝑣⃑⃑⃑⃑⃑( ) 圖 6:程式主架構流程圖,藍色對應「公式法」; 紅色對應「相對運動法」圖 7:「旋轉平面丟球」主要顯示區
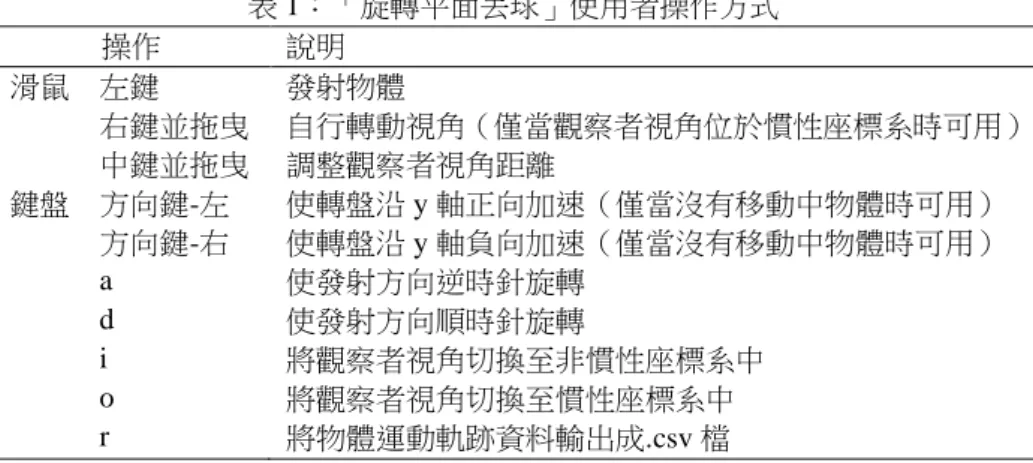
表 1:「旋轉平面丟球」使用者操作方式 操作 說明 滑鼠 左鍵 發射物體 右鍵並拖曳 自行轉動視角(僅當觀察者視角位於慣性座標系時可用) 中鍵並拖曳 調整觀察者視角距離 鍵盤 方向鍵-左 使轉盤沿 y 軸正向加速(僅當沒有移動中物體時可用) 方向鍵-右 使轉盤沿 y 軸負向加速(僅當沒有移動中物體時可用) a 使發射方向逆時針旋轉 d 使發射方向順時針旋轉 i 將觀察者視角切換至非慣性座標系中 o 將觀察者視角切換至慣性座標系中 r 將物體運動軌跡資料輸出成.csv 檔
二、 模擬在旋轉平面上施放單擺
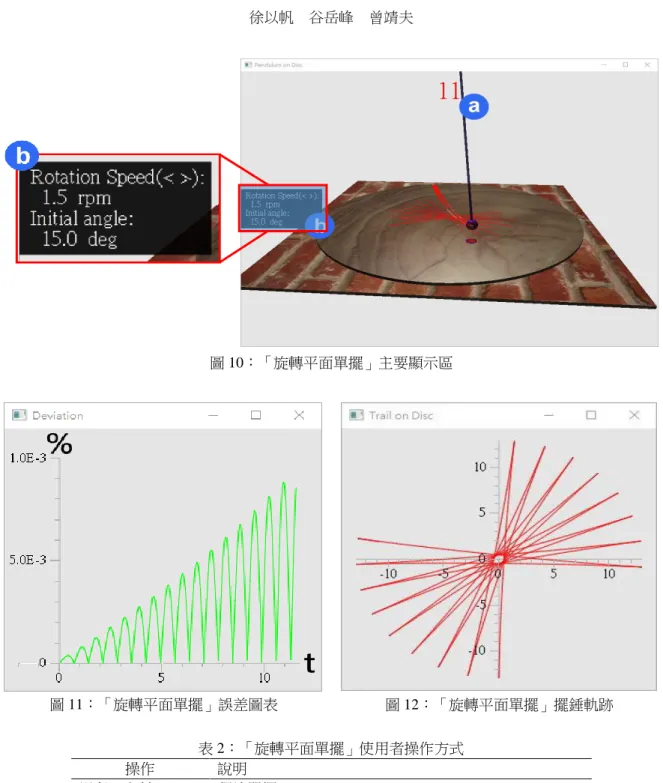
本程式介面包含一個主要顯示區(見圖 10)、誤差圖表(見圖 11)及擺錘於旋轉座標 系所觀測到的軌跡(見圖 12)。主要顯示區上方(a)數字為程式模擬時間(秒),真實執 行時間 1 秒對應程式模擬時間 1 秒,此程式採用 . 1,因此每秒運算 100000 回;左 方(b)為模擬參數,包含:目前轉盤旋轉速度(rpm)、單擺初始擺角(度)。本程式採用 單位為公分、秒,圓盤半徑 25 cm,擺長 50 cm。此程式中的誤差定義為: D 相對運動法和公式法擺錘的距離 單擺擺幅(擺長 × sin(初始擺角))× 1 % 誤差圖表之橫軸為時間,縱軸為誤差百分比,誤差的大小及成因分析將在後續討論。初始擺 角可於初始畫面輸入,使用者也能以鍵盤及滑鼠進行操作(見表 2)。 程式中,藍色物體為「公式法」之結果;紅色物體為「相對運動法」之結果,並且軌跡 圖表中的曲線為「相對運動法」之軌跡。 按下滑鼠後,慣性座標系中的物體(紅色擺錘)從起始點(使用者設定之起始角度)釋 放,具有初速度: 𝑣 ⃑⃑⃑⃑⃑( ) 𝜔⃑⃑⃑ × 𝑟⃑ 其中,𝜔⃑⃑⃑為旋轉平面相對於慣性座標系旋轉之角速度向量,𝑟⃑為軸心指向起始點之向量,之後 受重力及繩張力作用,其加速度為: 𝑎 ⃑⃑⃑⃑⃑( ) ⃑ +− ⃑ 𝑚 其中, ⃑為地表重力加速度(9.80065 m/s2 ),− ⃑為虎克定律算出之彈力, 值取 500000,𝑚為物 體質量,而在非慣性座標系中的物體(藍色擺錘)從起始點釋放,則具有初速度: 𝑣 ⃑⃑⃑⃑⃑( ) ⃑⃑ 其中,之後此物體受重力、繩張力及假想力作用,假想力由公式(10)計算而得,物體加速度 為: 𝑎 ⃑⃑⃑⃑⃑( ) ⃑ +− ⃑ 𝑚 − 𝜔⃑⃑⃑ × (𝜔⃑⃑⃑ × 𝑥⃑⃑⃑⃑⃑( )) − 2𝜔⃑⃑⃑ × 𝑣⃑⃑⃑⃑⃑( )表 2:「旋轉平面單擺」使用者操作方式 操作 說明 滑鼠 左鍵 釋放單擺 右鍵並拖曳 自行轉動視角(僅當觀察者視角位於慣性座標系時可用) 中鍵並拖曳 調整觀察者視角距離 鍵盤 方向鍵-左 使轉盤沿 y 軸正向加速(僅單擺釋放前可用) 方向鍵-右 使轉盤沿 y 軸負向加速(僅單擺釋放前可用) i 將觀察者視角切換至非慣性座標系中 o 將觀察者視角切換至慣性座標系中 r 將擺錘運動軌跡資料輸出成.csv 檔 圖 10:「旋轉平面單擺」主要顯示區 圖 11:「旋轉平面單擺」誤差圖表 圖 12:「旋轉平面單擺」擺錘軌跡
三、 模擬在旋轉球體上丟球
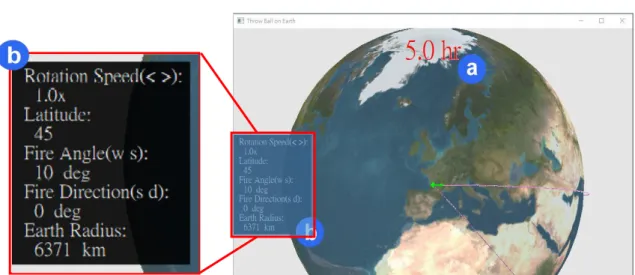
本程式介面包含一個主要顯示區(見圖 13)、誤差圖表(見圖 14)及物體於旋轉座標 系所觀測到的軌跡經等距圓柱投影變換之結果(見圖 15)。主要顯示區上方(a)數字為時 間(小時),真實執行時間 1 秒對應程式時間 0.1 小時,此程式採用 . 1,因此每秒 運算 1000 回;左方(b)為模擬參數,包含:目前轉速和地球實際轉速的比例、發射點所在 緯度(度)、目前發射仰角(度)、目前發射方向(度)、地球半徑(km);軌跡圖表中之 黑線為大圓線,即當球體無自轉時物體理論上會遵循的移動軌跡。本程式採用單位為公里、 小時,地球半徑 6371 km,物體初速 25000 km/hr,物體接觸地面或飛行時間超過 2.5 小時或 距地心超過 5 倍地球半徑後自動清除。此程式中的誤差定義為: D 相對運動法和公式法的距離 相對運動法已移動的路徑長× 1 % 誤差圖表之橫軸為時間,縱軸為誤差百分比,誤差的大小及成因分析將在後續討論。發射地 點緯度值(正數代表北緯,負數代表南緯)可於初始畫面輸入,使用者也能以鍵盤及滑鼠進 行操作(見表 3)。 程式中,藍色物體為「公式法」之結果;其他色彩物體為「相對運動法」之結果,並且 誤差圖表及軌跡圖表中的曲線顏色和所代表的物體顏色相同,以示區別。 按下滑鼠後,慣性座標系中的物體(紅色物體)從起始點(綠色金字塔)發射,具有初 速度: 𝑣 ⃑⃑⃑⃑⃑( ) ⃑⃑ + 𝜔⃑⃑⃑ × 𝑟⃑ 其中, ⃑⃑為使用者自行設定的發射速度,𝜔⃑⃑⃑為地球自轉之角速度向量,𝑟⃑為軸心指向起始點之 向量,之後此物體受重力作用,其加速度為: 𝑎 ⃑⃑⃑⃑⃑( ) ⃑ 其中, ⃑為重力,由公式(9)計算而得,而在非慣性座標系中的物體(藍色物體)從起始點發 射,則具有初速度: 𝑣 ⃑⃑⃑⃑⃑( ) ⃑⃑⃑⃑ 其中, ⃑⃑⃑⃑為使用者自行設定的發射速度於非慣性座標系中的投影,之後此物體受重力及假想 力作用,假想力由公式(10)計算而得,物體加速度為: 𝑎 ⃑⃑⃑⃑⃑( ) ⃑ − 𝜔⃑⃑⃑ × (𝜔⃑⃑⃑ × 𝑥⃑⃑⃑⃑⃑( )) − 2𝜔⃑⃑⃑ × 𝑣⃑⃑⃑⃑⃑( )表 3:「旋轉球體丟球」使用者操作方式 操作 說明 滑鼠 左鍵 發射物體 右鍵並拖曳 自行轉動視角(僅當觀察者視角位於慣性座標系時可用) 中鍵並拖曳 調整觀察者視角距離 鍵盤 方向鍵-左 使球體沿 y 軸正向加速(僅當沒有移動中物體時可用) 方向鍵-右 使球體沿 y 軸負向加速(僅當沒有移動中物體時可用) w 使發射仰角提高 s 使發射仰角降低 a 使發射方向逆時針旋轉 d 使發射方向順時針旋轉 i 將觀察者視角切換至非慣性座標系中 o 將觀察者視角切換至慣性座標系中 b 將觀察者視角切換至跟隨最後發射之物體 r 將物體運動軌跡資料輸出成.csv 檔 圖 13:「旋轉球體丟球」主要顯示區 圖 14:「旋轉球體丟球」誤差圖表 圖 15:「旋轉球體丟球」物體軌跡
四、 模擬在旋轉球體上施放單擺(傅科擺)
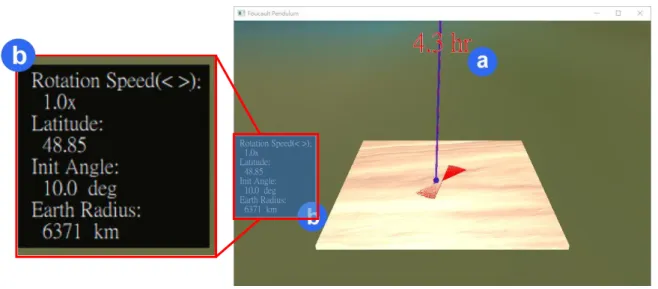
本程式介面包含一個主要顯示區(見圖 16)、誤差圖表(見圖 17)及擺錘於單擺底座 (旋轉座標系)所觀測到的軌跡(見圖 18)。主要顯示區上方(a)數字為時間(小時), 真實執行時間 1 秒對應程式時間 0.1 小時,此程式採用 . 1,因此每秒運算 100000 回;左方(b)為模擬參數,包含:目前轉速和地球實際轉速的比例、單擺所在緯度(度)、 單擺初始擺角(度)、地球半徑(km)。本程式採用單位為公里、小時,地球半徑 6371 km, 擺長 10 km。此程式中的誤差定義為: D 相對運動法和公式法擺錘的距離 單擺水平擺幅(擺長 × sin(初始擺角))× 1 % 誤差圖表之橫軸為時間,縱軸為誤差百分比,誤差的大小及成因分析將在後續討論。單擺設 置地點緯度值(正數代表北緯,負數代表南緯)及單擺初始擺角可於初始畫面輸入,使用者 也能以鍵盤及滑鼠進行操作(見表 4)。 程式中,藍色物體為「公式法」之結果;紅色物體為「相對運動法」之結果,並且軌跡 圖表中的曲線為「相對運動法」之軌跡。 按下滑鼠後,慣性座標系中的物體(紅色擺錘)從起始點(使用者設定之起始角度)釋 放,具有初速度: 𝑣 ⃑⃑⃑⃑⃑( ) 𝜔⃑⃑⃑ × 𝑟⃑ 其中,𝜔⃑⃑⃑為地球自轉之角速度向量,𝑟⃑為軸心指向起始點之向量,之後受重力及繩張力作用, 其加速度為: 𝑎 ⃑⃑⃑⃑⃑( ) ⃑ +− ⃑ 𝑚 其中, ⃑為重力,由公式(9)計算而得,− ⃑為虎克定律算出之彈力, 值取 500000000,𝑚為 物體質量,而在非慣性座標系中的物體(藍色擺錘)從起始點釋放,則具有初速度: 𝑣 ⃑⃑⃑⃑⃑( ) ⃑⃑ 其中,之後此物體受重力、繩張力及假想力作用,假想力由公式(10)計算而得,物體加速度 為: 𝑎 ⃑⃑⃑⃑⃑( ) ⃑ +− ⃑ 𝑚 − 𝜔⃑⃑⃑ × (𝜔⃑⃑⃑ × 𝑥⃑⃑⃑⃑⃑( )) − 2𝜔⃑⃑⃑ × 𝑣⃑⃑⃑⃑⃑( )表 4:「旋轉球體單擺」使用者操作方式 操作 說明 滑鼠 左鍵 釋放單擺 右鍵並拖曳 自行轉動視角(僅當觀察者視角位於慣性座標系時可用) 中鍵並拖曳 調整觀察者視角距離 鍵盤 方向鍵-左 使球體沿 y 軸正向加速(僅單擺釋放前可用) 方向鍵-右 使球體沿 y 軸負向加速(僅單擺釋放前可用) i 將觀察者視角切換至非慣性座標系中 o 將觀察者視角切換至慣性座標系中 r 將擺錘運動軌跡資料輸出成.csv 檔 圖 16:「旋轉球體單擺」主要顯示區 圖 17:「旋轉球體單擺」誤差圖表 圖 18:「旋轉球體單擺」擺錘軌跡
五、 誤差
本研究中「相對運動法」和「公式法」之間的誤差經過測試後,主要為精細度未能達到 完美所致,也就是誤差大小和 大小呈現正相關, 越大誤差越大。本研究採用從加速度計 算出速度,再計算出位移的方式進行物體運動的模擬,此方法的精細度受到 大小的影響不 可忽視,並且會有累積性,本研究原先在「旋轉平面」程式中皆採用 . 1進行模擬, 「旋轉球體」程式中皆採用 . 1進行模擬,兩者皆為每秒運算 1000 回(注意兩程式 中 和實際執行時間的對應關係不同),然而在「旋轉平面單擺」及「旋轉球體單擺」中, 皆造成相當大的誤差,但不斷減小 大小,會增加每秒運算次數,導致電腦負荷過重,無法 順暢地進行模擬,致使程式「方便性」下降,然而,若採用較精確的數值方法又無法達到「易 懂性」的要求。 為提升模擬程式「正確性」同時不損失模擬程式的「易懂性」,本研究結合 C++程式, 由 C++程式計算完物體運動後再由 Python 進行視覺化,由於 C++屬於較底層的語言,計算速 度較快,本研究因而能在不犧牲程式流暢度的情況下,大幅減小 ,使程式能以每秒運算 100000 回進行模擬,因此精細度大幅提升,在一般情況下,肉眼已無法看出誤差。以「旋轉 平面單擺」程式為例,初始條件皆為轉速 0.6 rpm、擺長 50 cm、擺角 6°、擺幅約為 6 cm, 分別設定不同 ,即代表不同每秒運算次數,其模擬結果之誤差和 呈現正相關,和每秒運 算次數呈負相關(見圖 19,注意縱軸數值大小不同)。 註:以上三張圖表皆為每 0.2 秒紀錄一次,紀錄 100 秒。 (a) 𝑡=0.001,每秒 運算 1000 回之誤差 (b) 𝑡 . 1,每秒 運算 10000 回之誤差 (c) 𝑡 . 1,每秒 運算 100000 回之誤差 圖 19: 𝑡值不同時之誤差比較肆、 結果討論
一、 比較模擬結果與實際數據
為了確認本研究所撰寫的程式符合實際情形,本研究找到中正大學的實際實驗數據[5], 雖然他們的實驗中單擺並無初速度(即在慣性座標系中為靜止,未考慮地球上傅科擺擺錘於 啟動前是和地球一起自轉),而本研究模擬的單擺釋放前和底座一同旋轉,具有初速度,但 這項差異不影響本研究驗證模擬模型是否正確,故本研究修改模擬程式以符合中正大學團隊 的實驗條件,經由疊圖分析,本研究開發之模擬程式所得軌跡和實際實驗相當一致(見表 5)。 表 5:本研究模擬之軌跡與實際軌跡比較表 實驗條件 模擬軌跡 實際軌跡[5] 疊圖 2. 28 3. 912 4.1 65 5.19 6.833 註: 為轉盤旋轉週期, 為單擺擺動週期,中正大學之文獻中只提及 和 ,並未提及𝜔 和𝜔[5],本 研究根據文章內容推斷𝜔 應為 、𝜔應為 ,本研究統一使用 ,其值和𝜔 𝜔 相等。除此之外,本研究亦分別找到法國先賢祠的傅科擺數據[7]及挪威科技大學的傅科擺數據 [8]。法國先賢祠(位於 48.855°N)傅科擺實際週期為 31.8 hr ,程式模擬結果為 31.85 hr;挪 威科技大學(位於 63.42°N)傅科擺實際週期為 26.76 hr,程式模擬結果為 26.79 hr。由此可 知,本研究的模擬結果能解釋實際現象,具有足夠之「正確性」
二、 比較模擬結果與公式結果
本研究所撰寫的程式中,「相對運動法」和「公式法」之結果相當吻合。在「旋轉平面 丟球」中,當轉速為 1 rpm 時,誤差最大不超過 0.013%,而當轉速達 66 rpm 時,誤差最大 仍未超過 5%;在「旋轉球體丟球」中,當發射點位於 45° N、轉速為 1 倍地球自轉速度時, 誤差最大不超過 0.008%,而當轉速達 50 倍地球自轉速度時,幾乎所有情形下最大誤差仍未 超過 5%;在「旋轉平面單擺」中,當轉速為 1 rpm、擺長為 50 cm、初始擺角為 10 度,模擬 時間達 700 秒時,誤差仍未超過 5%;在「旋轉球體單擺」中,當單擺位於緯度 45° N、轉速 為 1 倍地球自轉速度、擺長為 10 km、初始擺角為 10 度時,模擬時間達 29 小時(單擺軌跡 環繞一圈約 34 小時)時,誤差仍未超過 5%。以上各項目之誤差足以證明「相對運動法」之 模擬結果與「公式法」計算結果吻合。三、 解釋教科書中的氣旋示意圖
先前提到中學教科書中對科氏力的成因描述並不詳盡,完成模擬程式後,本研究更發現 課本或考卷上常出現的科氏效應示意圖(見圖 20)其實並不完全正確,此圖容易使學生誤認 為在北半球向西方前進的物體會因為科氏力的效應而轉為向西北方運動,但這並不符合本研 究程式模擬的結果(見圖 21),從 45° N 向正西方拋射的物體,雖有受到科氏力作用,最終 卻飛到加勒比海附近,在地圖上顯示為轉向西南方運動,以上的差異是因為前者過度放大科 氏力的效應,或忽略了球面上之物體在不受科氏力影響時之運動軌跡為大圓線的事實,受科 氏力影響後僅稍微北偏,基本上仍是沿著大圓線向西南方運動,同理,向東方運動的物體會 向東南方運動也非主要由科氏力所致,而是相較於未受科氏力影響時的軌跡(即大圓線)稍 微南偏。 圖 20:常見科氏力示意圖 圖 21:程式模擬結果四、 發布教學程式
本研究其中一個目的是希望做為教材,幫助同學們理解科氏力的概念,因此於程式撰寫 完成後,本研究將原始碼放上網路平台[9],提供學校教師或有興趣的同學們下載,或是根據 教學及實驗需要進行修改。五、 未來發展
本研究建立了模擬科氏力等假想力的方法,未來可以嘗試模擬其他類型的假想力,也可 以嘗試以目前的成果建立模型,研究科氏力對於潮汐、海流或行星風系等的影響,甚至用來 進行簡易氣象模擬。參考文獻
1. 李通藝(主編)(2016)。基礎地球科學 上冊。台北市:康熹文化。p66。 2. 黃福坤(2005)。物理問題討論區之「科氏力」網址: http://www.phy.ntnu.edu.tw/demolab/phpBB/viewtopic.php?topic=12364。 3. 北一女中地球科學討論區之「關於科氏力」網址: http://web.fg.tp.edu.tw/~earth/discuss/main/view.php?keyword=&dir=2&serial=932。 4. 郭昱彤、袁如慧、曲宏宇(2016):以桌上型傅科擺來討論旋轉座標系中的運動。物理教 育學刊,17(1),p43-48。 5. 謝豐仰、林岳樺、沈祐德(2016):搖擺傅科擺--傅科擺軌跡求解及模擬。小論文 第 1051115 梯次。6. 麻省理工學院物理系 Technical Services Group(製作者)(2012)。Coriolis Effect。網址:
https://www.youtube.com/watch?v=dt_XJp77-mk。
7. Wikipedia 之「Foucault pendulum」網址:https://en.wikipedia.org/wiki/Foucault_pendulum。
8. Jonas Persson(2016)。挪威科技大學物理系之「Foucault pendel」網址:
https://www.ntnu.no/fysikk/foucault。
9. GitHub-FrSh28 之「Coriolis_Force_Simulation」網址: https://github.com/FrSh28/Coriolis_Force_Simulation。
10. 李怡嚴(主編)(1989)。大學物理學 第一冊。台北市:東華書局。
11. David Halliday, Robert Resnick, Jearl Walker (2010) Fundamentals of Physics (9th ed.). Missouri: John Wiley & Sons, Inc.
Visualized Simulation of Coriolis Effect Using Relative Motion
Method
Yi-Fan Shyu
*, Yueh-Feng Ku, Jing-Fu Tseng
Taipei Municipal Jianguo High School *Corresponding author: [email protected]
Abstract
Coriolis effect is a relatively difficult concept in classical mechanics for high school students. Therefore, this research avoided calculus and used Newton’s laws of motion in inertia coordinate system along with the concept of relative motion to simulate Coriolis effect in a visualized manner using numerical method. First, the object motion is calculated in an inertia coordinate system. Secondly, the observer is transferred into a non-inertia coordinate system. That is, the object motion is projected into a non-inertia coordinate system using the concept of relative motion. Therefore the observer in non-inertia coordinate system can observe the presentation of Coriolis effect and other fictitious forces without the calculation of the effect of fictitious force. Using the above method, this research employed Python to developed four visualized simulation programs, which include simulations of fictitious forces on both a plane and a sphere. For example, the motion analysis of long-range projectile and Foucault pendulum on Earth. With these simulation programs, the difficulties of conducting full-scale or reduced-scale experiments can be avoided. This research also compared the results of the presented method with experimental data and that from the equations of fictitious force to confirm its correctness. Besides, it is found that the demonstration of the influence of Coriolis effect on cyclone in high school textbooks is over-simplified and is likely to mislead students if their teacher does not explain in details. Finally, this research offered the source codes of the simulation programs to interested students or teachers and expects to help students to understand the concept of Coriolis effect.
Key words