國 立 交 通 大 學
機 械 工 程 學 系
碩 士 論 文
單晶片雙軸電容式微加速規的改進與測詴
Testing and Improvement of a Single-chip Dual-axial
Capacitive Micro Accelerometer
研 究 生:江鎮宇
指導教授:徐文祥
單晶片雙軸電容式微加速規的改進與測詴
Testing and Improvement of a Single-chip Dual-axial
Capacitive Micro Accelerometer
研 究 生:江鎮宇 Student:Cheng-YU Chiang
指導教授:徐文祥 Advisor:Wensyang Hsu
國 立 交 通 大 學
機 械 工 程 學 系
碩 士 論 文
A ThesisSubmitted Department of Mechanical Engineering College of Engineering
National Chiao Tung University in partial Fulfillment of the Requirements
for the Degree of Master
in
Mechanical Engineering February 2011
Hsinchu, Taiwan, Republic of China 中華民國一百年二月
I
單晶片雙軸電容式微加速規的改進與測詴
研究生:江鎮宇
指導教授:徐文祥
國立交通大學機械工程學系 碩士班
摘 要
本論文研究重點在於承接先前所提出對稱式線圈型懸吊雙軸微加速度計,並加以改 進結構與製作流程、整合電路與機械結構並量測電性輸出,致力於完成單晶片電容式微 加速規的開發。 結構設計上,使用差動式感測懸臂來作電容的感測,且沿用對稱懸吊結構,但是在 感測懸臂設計上屏棄先前單邊固定並提供應力補償的設計,而改採用兩端固定的設計以 確保完全去除側向沾黏。同時為了減低殘留應力值和部分製程缺陷,再次修改製作流 程,並訂定製程規範,確定製程的穩定性。 製程結果量測方面,結構尺寸部分的量測將用到本實驗室之電子顯微鏡及三維輪廓 量測儀。結構翹曲量部分則由國家晶片系統設計中心提供之白光干涉儀(white-light interferometer)來量測,而頻率響應部份則透過國家晶片系統設計中心的微機電系統動態分析儀(MEMS Motion Analyzer, MMA)來量測。
在輸出特性方面,兩軸動態範圍在±5G 時,靈敏度即可達 300mv/G,而兩軸偶合度
約有 15%符合當初所訂定之規格,同時所設計的自我測詴致動器在製作及測詴有效,並
可提供靜電力使質量塊產生一微小的位移。而封裝測詴方面,也初步達成封蓋的動作,
II
Testing and Improvement of a Single-chip Dual-axial
Capacitive Micro Accelerometer
Student:Cheng-Yu Chiang
Advisor:Wensyang Hsu
Department of Mechanical Engineering
National Chiao Tung University
Abstract
Based on the previous design of our group, with symmetric coil-type suspension in the micro accelerometer, here the fabrication process is further improved, sensing circuit and MEMS structure are integrated, and the electrical output signal are measured for the development of a single-chip capacitive micro accelerometer.
For the structural design of micro accelerometer, differential sensing pair we used to achieve the capacitive measurement. In order to reduce side stiction, the sensing fingers are fixed at both ends in current design. At the same time, fabrication process is modified to reduce residual stress of polysilicon structure and the flaws during the whole process.
For the result of the fabrication process, scanning electron microscope (SEM, NCTU) and 3D profiler (ET-4000, NCTU) are used to measured geometric sizes of fabricated accelerometers. The optical profiler (white-light interferometer, CIC) and MEMS motion analyzer (MMA, CIC) are used to characterize the deflection of proof mass and the dynamic response of accelerometer, respectively.
For the electrical signal output, sensitivity of dual-axial accelerometers is shown to reach above 300 mv/G with the dynamic range of ±5G, however cross sensitivity is about 15%. The all signal self-test actuator is shown to successfully provide electrostatic force to move the proof mass. Currently, capping process of the micro accelerometer has been developed, and further package process in under way.
III
誌 謝
從大四推甄上開始旁聽到現在,雖然只有短短的兩年多,但要感謝的人實在很多。 首先當然要感謝我的指導老師徐文祥老師,在大三微機構設計的課程上,老師讓我對於 MEMS 這個領域有了初步的認識,而漸漸的在許多小實驗和報告中培養了一些興趣,引 領我加入了微機電實驗室。而這兩年內也從老師的身上學到很多,讓我受用無窮。 再來要感謝實驗室的夥伴,博班的小白哥、家聖、高手、囧夫、謝一哥、盈斌,不 論是在實驗上、理論上、以及未來規畫上博班學長們給了我很多建言,讓我受益良多。 另外感謝已畢業的浩宇、鎧宇、軒宇、淳旭、澤瑋五位碩班學長,帶領我度過歡樂的碩 一生活,懷念起做機率的實驗和遊戲立方體的日子 XD。再來感謝同窗的鋐明、小鐘、 該該、麥克、法師、謝大哥,碩一大家共同修課一起趕報告拼考詴,碩二也是各自為自 己的實驗打拼,彼此協助和幫忙才會有今天研究的成果,而最後感謝實驗室的學弟學妹 們小潘、馬彬、阿豆、芋頭,有你們在實驗室更熱鬧各開心,而且這樣人才夠能打三打 三 XD。 另外一方面,我也要感謝實驗上及研究上幫助我的各位貴人,像是加速度計組一脈 相承的拉可、胖虎、阿豆,CIC 量測:囧夫、高手、雷峻,WYCO 量測: 蹤影、政安等電 控的夥伴們,楊式係數量測: 貞慈,WetBench 訓練: 比斯吉、奎樞,謝謝你們不吝嗇的 在實驗上給予我很大的幫助。 最後感謝我從小到大的朋友們,桌球隊的夥伴們,系桌的戰友們、大學機械系的同 學們,以及在交大六年內結交的各路好漢。最後當然要謝謝我所有親愛的家人,感謝你 們永遠是那樣的支持我與鼓勵我,總是放心的讓我自己去做我想做的事情,謝謝你們。 總而言之,這些我所感謝的人們,在我的生命裡,有「你」真好!謝謝! 鎮宇 于 風城交大IV
目錄
中文摘要 ... I 英文摘要 ... II 誌謝 ... III 目錄 ... IV 表目錄 ... VII 圖目錄 ... VII 第一章 緒論 ... 1 1.1 研究動機 ... 1 1.2 文獻回顧 ... 4 1.2.1 MEMS 電容式加速規 ... 4 1.2.2 CMOS-MEMS 電容式加速規 ... 5 1.2.3 Standard CMOS-MEMS 電容式加速規 ... 61.2.4 Modified CMOS MEMS 電容式加速規 ... 6
1.2.5 本實驗室已開發雙軸加速規 ... 7 1.3 研究目標 ... 10 第二章 雙軸電容式微加速規改進設計 ... 11 2.1 設計流程概要 ... 11 2.1.1 加速度計操作原理 ... 11 2.1.2 電容式差動對感測方式 ... 12 2.1.3 結構翹曲量估算 ... 15 2.1.4 致動器作用概念 ... 16 2.2 設計更動 ... 18
V 2.2.1 感側懸臂設計 ... 18 第三章 製程改進與封裝開發 ... 20 3.1 製程規劃部分修改 ... 20 3.2 修正製程缺陷 ... 22 3.2.1 固定端附近缺陷 ... 22 3.2.2 結構表層受攻擊 ... 23 3.3 訂定尺寸設計規範 ... 24 3.4 封裝開發 ... 26 第四章 量測結果 ... 29 4.1 量測規劃 ... 29 4.1.1 結構量測 ... 29 4.1.2 訊號量測 ... 30 4.2 結構量測 ... 34 4.2.1 結構量測動態影像圖 ... 34 4.2.2 結構 SEM 圖 ... 35 4.2.3 結構量測結果 ... 36 4.2.4 結構可動率估算 ... 39 4.3 輸出特性量測 ... 39 4.3.1 加速度計實量測展示 ... 39 4.3.2 靈敏度與非線性度 ... 40 4.3.3 動態範圍 ... 42 4.3.4 耦合度 ... 42 4.3.5 自我測詴 ... 44 4.3.6 環境震動影響 ... 46 4.3.7 環境光的耦合 ... 46 第五章 結論 ... 48
VI 5.1 總結 ... 48 5.1.1 改進部分 ... 48 5.1.2 結構量測 ... 48 5.1.3 輸出特性量測 ... 48 5.2 未來工作 ... 49 參考文獻 ... 50
VII
表目錄
表 1 慣性感測器在消費性電子產品之應用 ... 2 表 2 ADI, ADXL 系列加速度計性能與價格[2] ... 3 表 3 線圈型和蜿蜒型懸吊比較表[9] ... 9 表 4 製程能力表 ... 25 表 5 偏轉角度與耦合度關係表 ... 44 表 6 SELF-TEST 結果 ... 45圖目錄
圖 1 2004-2009 MEMS 慣性感測器市場[1] ... 2 圖 2 慣性感測器專利分佈圓餅圖 ... 3 圖 3 體型微加工電容式加速規[3] ... 4圖 4 (A)SOI-MEMS INERTIAL INSTRUMENT[4],(B) SOI-MEMS INERTIAL ARRAY[5] ... 5
圖 5 (A)CMOS-MEMS 單軸加速度計[6],(B)特殊設計補償電容覆蓋面積[6] ... 6
圖 6 (A)ADI, ADXL203[8],(B)ADI, ADXL330[8] ... 7
圖 7 雙軸加速規 ... 8 圖 8 對稱式及非對稱式懸吊比較 ... 9 圖 9 質量塊運動系統 ... 11 圖 10 加速度計感測流程 ... 12 圖 11 (A)上下型差動對,(B)左右型差動對 ... 13 圖 12 左右型差動對無法正確判讀加速度值 ... 13 圖 13 差動對電容感測示意圖 ... 15
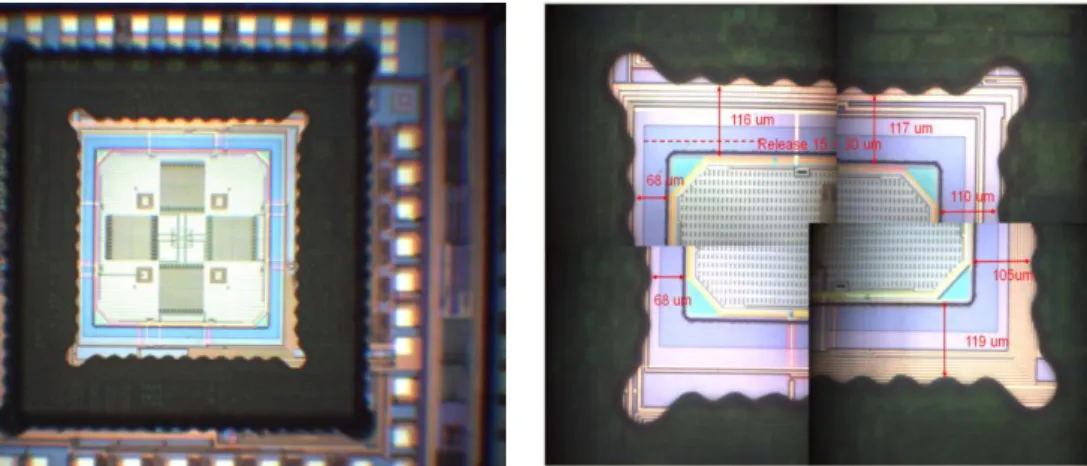
VIII 圖 14 將感測懸臂的固定端由外面改成裡面(靠近感測質量塊) ... 16 圖 15 受翹曲的影響下的感測面積 ... 16 圖 16 兩電容板示意圖 ... 17 圖 17 致動器與阻檔塊的配置圖 ... 17 圖 18 兩端固定設計完全防止沾黏 ... 18 圖 19 改良後雙軸加速度計 ... 19 圖 20 抗沾黏設計成功率與 SEM 對照圖 ... 19 圖 21 製程流程圖 ... 21 圖 22 固定端附近缺陷 ... 22 圖 23 固定端附近無缺陷 ... 23 圖 24 3G 結構表層受攻擊 ... 23 圖 25 3G 結構層無異狀 ... 24 圖 26 製程光罩圖 ... 24 圖 27 製程能力 SEM 圖 ... 25
圖 28 精材 SI CAP & GLASS FRIT 封裝流程[11] ... 26
圖 29 採用此封裝須預留 500UM 的空間[11] ... 27 圖 30 打線後雙軸加速規立體顯微鏡圖 ... 27 圖 31 封裝後 OM 圖 ... 28 圖 32 封裝後 SEM 圖 ... 28 圖 33 國家晶片中心儀器(A) 白光干涉儀[12],(B) MMA 動態分析儀[12] ... 29 圖 34 加速度計量測帄台 ... 31 圖 35 三維載台及小型振動機 ... 31 圖 36 靈敏度量測示意圖 ... 32 圖 37 耦合度量測示意圖 ... 32 圖 38 動態範圍量測示意圖 ... 33 圖 39 非線性度量測示意圖 ... 33
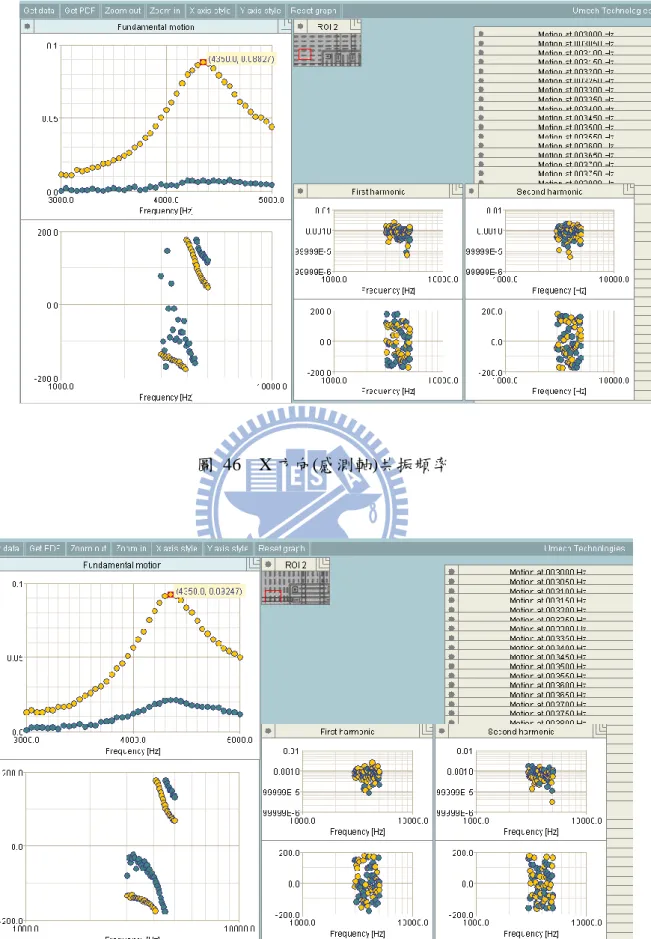
IX 圖 40 雙軸微加速規動態影像圖 ... 34 圖 41 主結構 SEM 圖 ... 35 圖 42 懸吊及致動器 SEM 圖 ... 35 圖 43 表面輪廓圖 ... 36 圖 44 經 CURVE FITTING 後所得曲率圖 ... 36 圖 45 兩片晶片各取六個 SAMPLE 所得殘餘應力值 ... 37 圖 46 X 方向(感測軸)共振頻率 ... 38 圖 47 Y 方向(感測軸)共振頻率 ... 38 圖 48 可動率分析圖 ... 39 圖 49 (A)橫向左右來回的運動,(B)縱向前後來回的運動 ... 40 圖 50 (A)左右傾斜,(B)前後傾斜 ... 40
圖 51 (A) X 軸 與 (B)Y 軸 輸出 ( SHAKER +/- 1G @ 23HZ) ... 41
圖 52 X 軸 靈敏度 318 MV/G ( 0 ~ 5G @ 23HZ) ... 41 圖 53 靈敏度 312 MV/G( 0 ~ 5G @ 23HZ) ... 41 圖 54 訊號線的擾動影響震動帄台 ... 42 圖 55 Y 對 X 耦合度 14.5 % (Y 方向震動@23HZ) ... 43 圖 56 X 對 Y 耦合度 14.9 % (X 方向震動@23HZ) ... 43 圖 57 COB 板示意圖 ... 44 圖 58 自我測詴結果 (X: -160V Y: +170V) ... 45 圖 59 固定不良時的輸出( SHAKER +/- 4G @ 23HZ) ... 46 圖 60 實驗室日光燈對加速度計耦合的頻譜 (120 HZ) ... 47 圖 61 靜止時,加速度計的輸出 載入 120 HZ 的正弦波 ... 47
1
第一章 緒論
1.1 研究動機
微機電系統(Micro-Electro-Mechanical Systems, MEMS)在近年來是一個備受矚目的 研究領域,因其具有微小化之優勢、積體化的製程方法、可結合現有的積體電路製程以 及多樣性的應用範圍,使得這個領域有無限可能的發展。此系統利用了半導體製程的沉 積、微影、蝕刻等方法來製造出各種可動或立體之奈微米結構,而藉由微小化及批次量 產的特性可以讓產品之生產成本大幅的下降,使得微機電產品更具有市場發展的潛力。 目前市面上已經可以看到許多利用微機電技術所製作的產品,例如投影機裡的陣列微反 射鏡、噴墨印表機的噴墨頭等;而現在許多 3C 產品,如手機、數位相框等,拜微機電 系統的微小化以及低成本之賜,也加入了微加速規來感測使用者的行為,使得冰冷的電 子產品,好像有了與人們作互動的能力!在現今越來越強調人機互動的社會中,微機電 產品更有了絕佳的發展機會。 慣性感測器如微加速規、微陀螺儀在微機電系統中,算是較早投入市場研發的產 品,早期的應用多在於軍事上的飛彈及太空探索用的導航、汽車安全氣囊或是 GPS(全 球衛星定位系統)等,而近幾年來則因技術成熟、成本下降,慢慢的投入到消費性電子 產品上的應用。例如現在市面上任天堂的當紅電視遊戲器 Wii,藉由慣性感測器的體感 改變了以往人們的遊戲方式,打開了遊戲市場上的藍海,成為目前市場上的霸主。這些 隨處可見的例子,在在的表現出慣性感測器市場還有很大的成長空間,且市場應用面已 經從早期的軍事國防或是昂貴的產品漸漸發展至一般民眾皆可接觸到且相對來說便宜 的消費性電子市場。像是 iphone 等智慧型手機的崛起,這對於慣性感測器的商機更是大 幅成長。從 WTC(Wicht Technologies Consulting) 2004 至 2009 年 MEMS 慣性感測器的市 場評估報告[1]中如圖 1 我們可以發現,慣性感測器在市場上總值超過 13 億美元,且加
2 速度計在消費性電子這一環的年複合成長率(CAGR)有達 33%,而廣大的慣性感測器市 場也成了這次研究主要的動機。 圖 1 2004-2009 MEMS 慣性感測器市場[1] 由於消費性電子產品有智慧化、低成本、微小化三大市場發展趨勢,對微機電技術 製作之微感測器需求日益增加;近年來電子業的成熟以及製程能力的提升,使得慣性感 測器可以與後端感測電路做整合,配合在電路上原有的量產能力,製作成本的下降,造 就了以 CMOS 製程相容微機電技術製作的慣性感測器在消費性電子的潛在廣大市場, 其現今的應用已日趨廣泛,可從一般的 3C 產品上看出,謹以表 1 簡單列出其產品應用。 表 1 慣性感測器在消費性電子產品之應用 應用 功能目的 公司、產品 選用的慣性感測器 滑鼠 定位 羅技 MX Air Mouse 三軸加速度計 電玩 虛擬實境 任天堂 Wii 三軸加速度計(ADXL330) 數位相機 防手震 Panasonic, Canon S80.. 三軸加速度計 雙軸陀螺儀 手機 數位相框 人機互動(影像旋轉) Apple: i-phone Sony Ericsson, W910i
雙軸加速度計 三軸加速度計 雙軸陀螺儀 Mp3
3
慣性感測器算是發展許久的產品,其累積技術相當成熟,故為了投入市場競爭,先 了解市場上的情況是必要的。本實驗室針對慣性感測器這一領域,在美國專利局作了搜 尋,在大約 258 篇的相關專利中,美國 Analog Device Inc.這家公司佔了最多的專利篇數
(約 38%)如圖 2,且其發展的慣性感測晶片在市場中也具有相當低的價格,能將各型的 加速度計與陀螺儀單價壓至 10 元美金以下,並維持相當好的性能,如加速度計 ADXL103、335 系列皆有超過 1kHz 的工作頻寬、與 300mV/G 以上的靈敏度如表 2[2], 所以這次研究方向會以 ADI 公司的產品做規格的依歸。 圖 2 慣性感測器專利分佈圓餅圖 表 2 ADI, ADXL 系列加速度計性能與價格[2]
Type # of Axes Range Sensitivity Band Width (kHz) Price
ADXL103 1 ±1.7g 1000 mV/g 2.5 $8.19 USD
ADXL335 3 ±3g 300 mV/g 1.6 $2.38 USD
ADXL330 3 ±3g 300 mV/g 1.6(XY) 0.55(Z) $7.29 USD
由上可看出加速規在消費性電子應用之廣,而本研究最大特點在於整合了三大領域: 製程、微機構、微電子電路進行產品的研發,如此發展方式可縮短研發的時程、提升微 機電產品的性能,並希望藉由此整合式的製作方式降低製作成本,使其具備量產的可能 性。CMOS-MEMS 在國內外推動多年,但可用之單晶片帄台仍有限(台積電於 2008 年六 月正式對產業界公佈其多種 MEMS 製程帄台)。
4 本研究即在結合學界與合作企業的研發優勢,合作開發低成本、整合感測電路及感 測結構之 Poly-MEMS 電容式微加速規,及相關的設計分析、製作與量測技術,包含建 立可自有掌控之多晶矽微機電製程帄台與多項專利技術,以求掌控改進關鍵技術的能 力。
1.2 文獻回顧
1.2.1 MEMS 電容式加速規 最早製作電容式加速度計是使用了 MEMS 的技術,其依製作的方式又可分成體型 微加工(Bulk Micromaching)或面型微加工(Surface Micromaching)兩種,製作完感測結構 後再配合外加的電路作連接以完成製作,分別以下面兩例為代表;1990 年 Rudolf 提出 的單軸差動對電容加速度計[3],由於追求較高的靈敏度(2fF/G),其使用體型微加工的方 式來蝕刻矽以製作出較大的感測質量塊如圖 3,並使用 Pyrex Glass 此種與矽之熱膨脹 係數較為接近的材質做為上下電極,利用陽極接合後完成上下帄行電極板的製作。體型 微加工配合陽極接合有成本過高的缺點。 圖 3 體型微加工電容式加速規[3]5 1.2.2 CMOS-MEMS 電容式加速規 由於電容感測方式搭配電路是必要的,相較於 MEMS 製作的電容加速度計, CMOS-MEMS 可將原本的電路合併在感測結構附近,此舉拉近了電路與結構體的距離 而大大地減少寄生電容,成本的優勢也因本來就已量產的 CMOS 電路更加明顯,在量 產能力與產品性能可同時提升的情況下,CMOS-MEMS 相對於 MEMS 的優勢是顯而易 見的。但也因為結構設計遷就於 CMOS 製程,在各層材料皆很薄(<1um)的情況下,電 容感測面積減少,靈敏度也跟著下降,於是電容式加速度計轉為在 CMOS 製程帄台去 做延伸發展,結合了 SOI-MEMS、UV-LIGA、Metal Electroplating 等微機電製程的方式, 來解決電容感測面積減少而靈敏度也跟著下降的問題。以下舉結合了 SOI-MEMS 的例 子。
圖 4(a)所示為 Brosnihan 在 1997 年提出的 SOI-MEMS 電容感測器[4],其先利用 SOI(Silicon On Insulator) Wafer 製作好 CMOS 電路,同時製作感測結構,由於 SOI 本身 的特色造成結構深達 45um,大大提升了電容的感測面積,也由於其性能表現良好,一 直到 2006 年仍有許多發展在 CMOS 帄台上的 SOI-MEMS 提出改進的製程,如圖 4 (b) 所示,Hudson 也提出 SOI-MEMS 慣性感測器[5],並在 CMOS 帄台上作設計與整合。
(a) (b)
6 1.2.3 Standard CMOS-MEMS 電容式加速規 前述 CMOS-MEMS 電容式加速規結合其他種製程的方式,都是為了增加電容的感 測面積以改善 CMOS-MEMS 加速度計中靈敏度不佳的特性(~0.5fF/G),故在原有的 CMOS 製程後再做另外的發展或特殊後製程,而這些製程改變都會成為增加成本的變 因,於是 2002 年美國卡內基大學 Fedder 實驗室嘗詴使用標準的 CMOS 製程製作單軸的 電容式加速度計如圖 5(a)[6],此設計只需簡單的兩道後製程(乾蝕刻)以釋放感測結構。 如圖 5(b)所示為 Curl Matching 的概念,透過此固定與感測結構同時懸浮的概念,成功 的補償了殘留應力對結構的影響,維持 CMOS-MEMS 中不錯的電容感測面積。 (a) (b) 圖 5 (a)CMOS-MEMS 單軸加速度計[6],(b)特殊設計補償電容覆蓋面積[6]
1.2.4 Modified CMOS MEMS 電容式加速規
現在標準的 CMOS 製程如 TSMC 2P4M CMOS MEMS,金屬大多採用阻值較低的材 料(Al),其與犧牲層(Oxide)的熱膨脹係數有較大的差異(25 v.s 0.4 (1/℃)),造成釋放結 構後的殘留應力極大,嚴重影響電容式加速度計中各元件的翹曲程度,進而造成電容最 重要的感測面積無法有效評估,此瓶頸也讓電容式加速度計的性能無法更進一步的提 升。有鑒於此,ADI 於 2004 年直接從製程材料上作改善[8],採用多晶矽(Polysilicon)取 代標準 CMOS 製程中的金屬(Al),自己開發出一套 Poly MEMS 製程來製作加速規如圖
7
6(a)(b),結構體厚度達 4um;藉著 Poly 本身在結構上良好的表現,且與氧化矽熱膨脹係 數接近的特性,減少殘留應力對結構的影響,也將 CMOS-MEMS 的加速度計靈敏度提 升至 1fF/G 以上。
(a) (b) 圖 6 (a)ADI, ADXL203[8],(b)ADI, ADXL330[8]
1.2.5 本實驗室已開發雙軸加速規
如圖 7 採用 Polysilicon 當結構層,雙軸加速規主要設計規格:靈敏度(0.7fF/G)、頻
寬(1.6kHz)、解析度(280μg/√Hz)。其結構上包括質量塊、感測懸臂、線圈型懸吊、致動器
8 圖 7 雙軸加速規 初步成果 1. 完成退火製程與殘留應力資料庫的建立。 2. 完成加速規之尺寸設計及懸吊的模擬分析。 3. 建立抗側向與基底沾黏的設計規則。 4. 量測雙軸加速規兩軸之共振頻率。 5. 成功製作出結構厚度 4um 之加速規。 尚未達成 1. 仍有部分沾黏情況產生。 2. 僅完成結構量測部分,缺少電性輸出量測。 3. 整合電路與感測結構。 4. 封裝開發。
9 另外,2009 年蔣鎧宇在碩士論文[9]當中提出了對稱式線圈型懸吊的設計。 此設計特點在於: 1 在彈簧常數 K 值與蜿蜒型相當的情況下,可佔用較少的面積,如表 3 表 3 線圈型和蜿蜒型懸吊比較表[9] 2.透過對稱式擺放懸吊的方式,可達到雙軸的 K 值相等,使得在製程誤差下兩方 向之 K 值仍達到 Kx=Ky,如圖 8。 圖 8 對稱式及非對稱式懸吊比較 3. 減少殘留應力對於感測面積(靈敏度)的影響。
10
1.3 研究目標
本論文的研究目標主要是依據本實驗室已開發雙軸加速度計為範本,來進行測詴與 改進。透過這次的實驗研究,達到以下幾項目標: 1.整合電路與感測結構。 2.降低沾黏比率,採用兩端固定設計之感測懸臂。 3.完成輸出特性量測。 4 完成初步封裝測詴。11
第二章 雙軸電容式微加速規改進設計
2.1 設計流程概要
2.1.1 加速度計操作原理 圖 9 質量塊運動系統 如上圖 9 所示為一帶有阻尼的質量塊運動系統,當此質量塊受到一外在加速度時, 其運動式與質量、彈簧、阻尼有關,可表示如下;其中 m 為質量塊的質量(kg),b 為系 統等效阻尼(N/ms-1 ),k 為懸吊系統的彈簧常數(N/m)。 externala
m
kx
x
c
x
m
. .. ………(1) 透過 Laplace Transform 將此運動式表示成: 2 0 0 2 1 ) ( ) ( Q s s s A s X ………(2)12 其中系統共振頻率 m k 0
,而 Q(Quality Factor)與系統阻尼、質量塊、共振頻率 有關,當系統工作頻率遠小於共振頻率時可推得質量塊位移量 0 a x ,由此式可看出系 統受到加速度時,與其造成的位移成正比的關係,藉由此位移變化造成的電容、電阻或 溫度的改變,經由電性的輸出來判斷外在環境給予加速度的大小,其感測流程如 圖 10 所示,此加速度透過質量塊轉換成慣性力(F=ma),再經由懸吊系統轉換成位 移變化(x=F/k),此位移變化帶動其餘參數的改變,最後藉由電路將此改變量讀出,完成 加速度計的感測。 圖 10 加速度計感測流程 2.1.2 電容式差動對感測方式 電容式差動對為最常見的電容式感測方法,由 Rudolf 在 1990 年提出[5],其可以消 除共模的訊號(Common Mode),減少外界環境如溫度、製程變異的影響,也可提升訊號 兩倍,大致可以分為兩種,上下型如 圖 11(a)與左右型如圖 11 (b)。13 (a) (b) 圖 11 (a)上下型差動對,(b)左右型差動對 結構移動的距離與電容的變化的關係式可以表示成: 上下型 ………(3) 左右型 ……….………(4) 而左右型相較於上下型有完全線性的優勢;且同樣的 Finger 配置數目下,左右型具 有較多的等效感測對如圖 11,但在 CMOS-MEMS 中仍多採用上下型差動對,主因為 CMOS 製程受限於各層材料的不同,且熱膨脹係數差異過大,元件翹曲無法使感測面積 與加速度有相關且正確的趨勢,無法從感測電容上作判讀,如圖 12。 圖 12 左右型差動對無法正確判讀加速度值 2 2 2 2 2 d x A d d x A C x d t C 2
14 所以最後我們選用上下型的差動對,而其推導公式如下:假設忽略掉微弱的邊緣效 應(fringing effect),即電荷會在邊緣部份不均勻的分布現象,電容可表示成 d A Cr0 , 假設質量塊受一加速度時,產生一微小位移量 x ,C1與C2為下圖 13 中兩個相鄰電容, 則此微小位移量的變化將造成 x d A C r 0 1 、 x d A C2r0 ,則量測到的電容差 2 2 0 2 1 2 x d x A C C C r ,可得: 0 2 0 2 2 C d r A x C x ………(5) 把較小的Cx2省略掉,可以得到: C d x r 0 2 2 ………..(6) 故所量測到的加速度 a: C m d k m x k m F a r s s 0 2 2 ………..(7) 此式可看出加速度與電容變化的線性關係,藉由感測電路量測電容變化,來得到加 速度的值。
15 圖 13 差動對電容感測示意圖 2.1.3 結構翹曲量估算 由於受到殘留應力的影響,在釋放結構時,結構可能因此而翹曲,所以我們必需估 算翹曲量對於我們靈敏度的影響。首先我們假設殘留應力從結構下表面到結構上表面為 線性遞增如圖,並由 Senturia 提出的公式一如式 8,在藉由公式二如式 9: 公式一: ……….………(8) 公式二: .………..…………..(9) 來得到懸臂長度與翹曲量的關係式: …...………(10) 由上式 10 可看出在同樣的殘留應力下,懸臂長度(x)越長,懸臂的翹曲量(z)也會隨 之增加,其中ρ為取率半徑、E 為楊氏系數、ν為浦松比、t 為結構厚度、σ為殘留應 力大小。 而我們將感測懸臂的固定端(Anchor),由外面改到裡面,來減少殘留應力造成懸臂 2 2 2 2 2 ] ) ( 1 [ ) ( 1 x z x z x z x 2 1 ) 1 ( 2 x t E z 1 ) 1 ( 2 1 E t
16 翹曲對於我們感測面積的影響,如圖 14 所示。所以當我們以這種設計時,考慮結構翹 曲量,因為感測質量塊懸臂與固定懸臂的固定端不同,造成感測面積還是會有些微的減 少,而當 z << L 時,其感測面積如式 11 及圖 15 所示。 圖 14 將感測懸臂的固定端由外面改成裡面(靠近感測質量塊) ……..……….(11) 圖 15 受翹曲的影響下的感測面積 2.1.4 致動器作用概念 為了方便後期的校正與測詴,我們設計了自我測詴致動器在加速規的周圍,利用靜 電力來驅動我們的質量塊。兩電容板(圖 16)間的靜電力公式如下: ………( 12)
L
z
t
A
overlap L L s
(
)
2 0 2 0 2 1 V d L t F 17 圖 16 兩電容板示意圖 其中ε為介電係數、d 為兩板間距、L 為重疊長度、t 為結構厚度、V 為外加電壓。 在此外加電壓 3V 到致動器的作用下,我們希望可以提供加速規等效 5G 的加速度,以 便做校正與測詴。而最大的致動力 Fmax會出現在致動器與感測質量塊的間距最小的時 候,也就是致動器與質量塊的間隔和阻擋塊與質量塊的間隔相減的距離。而致動器與阻 檔塊的配置如圖 17。 ………..( 13) 圖 17 致動器與阻檔塊的配置圖
18
2.2 設計更動
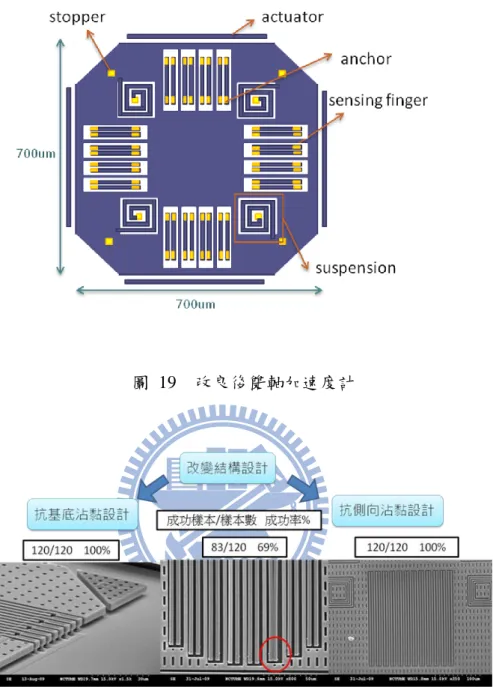
2.2.1 感側懸臂設計 如果要完全防止側向沾黏的情況發生,我們可以使用感測懸臂兩端固定的設計,讓 懸臂完全定住而不會有沾黏的情況,如圖 18。唯這種設計懸臂一樣不能太長,否則沾 黏會發生在懸臂的中間。因此我們將 Lay out 感測懸臂部分由原本的單邊固定,更改為 兩端固定,如圖 19 經。而經由統計過後可以發現到,在兩端固定設計方面成功懸臂對 數率為百分之百,已成功獲得改善,而側向鋸齒設計方面只達到 69%,還存在改進的空 間,如圖 20。 圖 18 兩端固定設計完全防止沾黏19
圖 19 改良後雙軸加速度計
20
第三章 製程改進與封裝開發
3.1 製程規劃部分修改
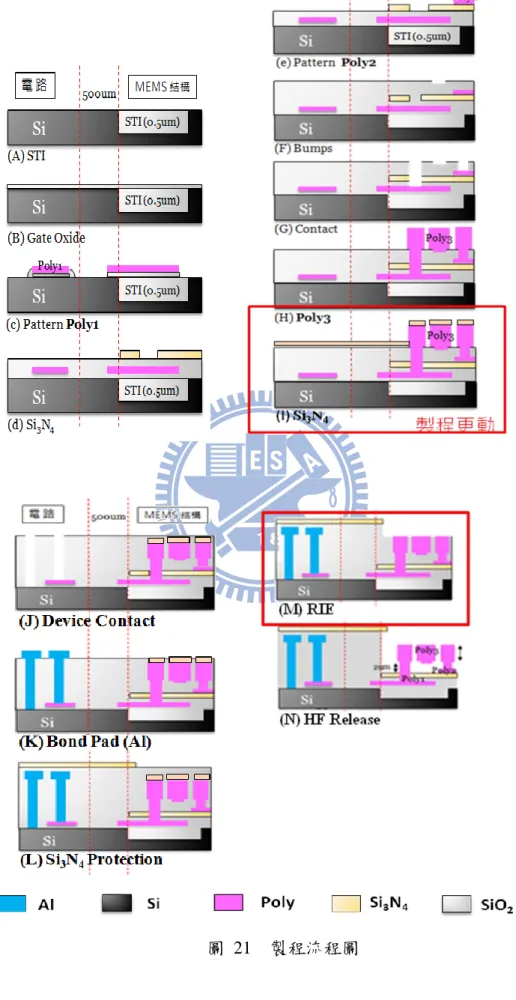
在我們改變懸臂設計之後,原本設計所達到的應力補償效果將會消失,因此為了提 高感測面積,必須致力於降低殘餘應力值,使得質量塊與感測懸臂在同一帄面上。而我 們在製程上發現到,在質量塊(Poly Si)上方加上一層氮化矽能夠降低原本的殘留應力 值,同時在後段進行 RIE 所造成的頂部質量損失(top loss)也會因氮化矽的阻擋而維持原 本質量塊的厚度。所以,從製程上來改進設計上的不足也是這次研究的方法之一。主要結構共計有三層 Poly 如圖 21,第一層當訊號線,第三層作為結構層,第二層 則是幫助結構站在基底上且多此層可以做更多設計上的延伸變化(如三軸以及導線),晶 片上分為 CMOS 電路與 MEMS 結構兩個區塊同時進行,兩區域大概相距 500um 以方便 後端封裝製程的進行,先在 Si 晶圓上實行 STI(shallow trench isolation),掏空 0.5um 並 填滿氧化矽以拉大 MEMS 結構與基底的距離,降低寄生電容(a),長 CMOS 電路所須的
Gate Oxide(b),沉積並定義出電路所須用的 Poly1,此 Poly1 負責將 MEMS 結構的訊號 送至 CMOS 電路裡(c),定義出第一層 Nitride 供 Poly2 站住的空間(d),沉積定義 Poly2(e), 沉積氧化層並開一層抗沾黏的突起物(bumps)(f),開 Contact 至 Poly1 和 Poly2(g),沉積 4um 厚的 Poly3 作為電容加速度計的結構體及感測懸臂(h),再沉積一層 Nitride 用來減 少 top loss 和調整殘餘應力大小(i),開 CMOS 電路的 Contact(j),沉積金屬線(Al)以供打 線及傳輸訊號(k),沉積 Oxide 與保護層 Nitride 並定義 MEMS 結構的區域(l),以 RIE 攻 擊 Nitride 以開 Bond-Pad (m),HF 蝕刻以釋放機械可動結構(感測懸臂、質量塊)(n),。
21
22
3.2 修正製程缺陷
為了改善製程品質和良率,針對各項製程缺陷進行了解,並加以修正。 3.2.1 固定端附近缺陷 在固定端附近的氮化矽在後製程 HF 蝕刻的過程中,邊緣處抵擋不住攻擊而使得底 下氧化矽層遭到破壞而有孔洞的現象,如圖 22。而針對這個問題,很明顯的可以發現 到是因為阻擋層氮化矽無法有效的阻擋 HF 從側邊縫隙中鑽入,因此透過 wet dip 的方式 讓在氮化矽下方的多晶矽 anchor 比上方來的寬,這樣一來就可以避免此現象的發生,如 圖 23。 圖 22 固定端附近缺陷23 圖 23 固定端附近無缺陷 3.2.2 結構表層受攻擊 在固定端和導線經過的部分,容易在 3G 層遭受到攻擊,如圖 24。經過多次實驗後 證實為曝光顯影之問題,在固定端和導線部分由於有多一層多晶矽(1G 層),在層積 3G 層後會相較其他部分來的高,因此在曝光時易遭受攻擊。透過改變光阻的厚度從 0.66um 變為 1.8um 可以改善此現象,如圖 25。 圖 24 3G 結構表層受攻擊
24 圖 25 3G 結構層無異狀
3.3 訂定尺寸設計規範
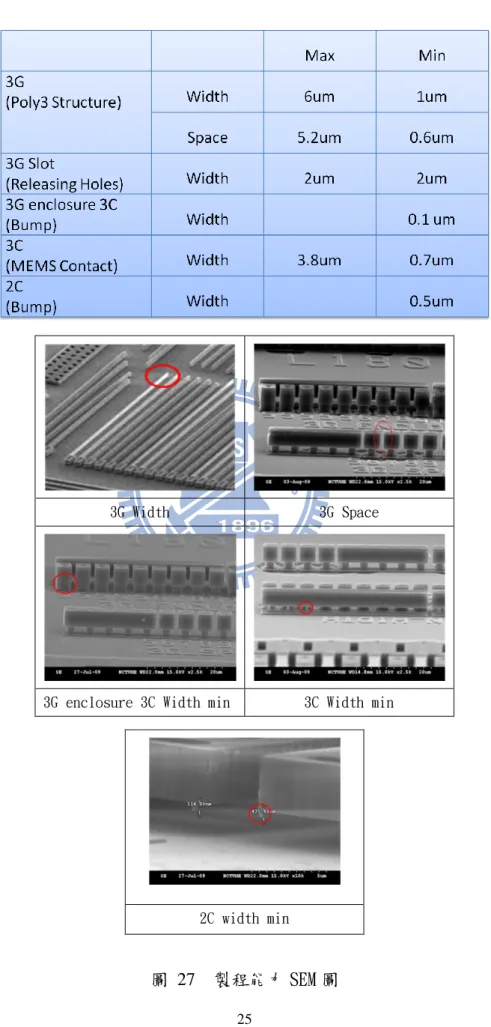
如下圖 26 所示,一般來說製程能力必定有極限存在,不論是線寬、厚度以及孔洞 深度皆會有其尺寸限制,因此我們也設計許多 Test Key 如圖 27 來檢驗我們製程能力, 訂定尺寸設計規範。此項作業的好處是,未來在設計其他產品時,可以清楚的知道本製 程的尺寸限制,不會畫完光罩後無法達到設計要求。詳細數值如表 4 所示。 圖 26 製程光罩圖25
表 4 製程能力表
3G Width 3G Space
3G enclosure 3C Width min 3C Width min
圖 27 製程能力 SEM 圖
26
3.4 封裝開發
封裝是微加速度計最難的課題,封裝的壓力大小影響加速度計的性能甚鉅,封裝壓 力越低,空氣造成的阻力越小,製程規劃前須事先知道封裝的需求以納入製程的考量, 此次封裝計畫採用精材的 Si Cap 與 Glass Frit[11]如圖 28,流程如下(1)蝕刻 Silicon Cap
(2)沉積 Glass Frit (3)與 MEMS 結構熔接(4)晶片切割 (5)打線
而使用玻璃膠來作鎔接的主要有以下幾項優點:表面粗度要求低,與多種不同的表 面皆相容;可直接在封蓋上做導線(Feed through);可在晶片切割前就作封裝(wafer level bonding);封裝溫度中等 ( 350 ~ 450 ℃);密封性高 (對於 MEMS 結構特別重要)。但採
用此玻璃膠黏合,從電路至結構須預留約500μm 的空間如圖 29,此亦納入後續製程規
劃的考量。
27 圖 29 採用此封裝須預留 500um 的空間[11] 目前已完成加速規初步整合製作,成功打線及測詴,如圖 30,並尋求國內三家半 導體封裝廠協助開發並完成合作保密協議簽訂。其中一家已於 2010 年初進行封蓋相關 流程如圖 31、圖 32。 圖 30 打線後雙軸加速規立體顯微鏡圖
28
圖 31 封裝後 OM 圖
29
第四章 量測結果
4.1 量測規劃
測規劃分為結構量測與訊號量測兩部份,前者送交國家晶片中心量測,後者由本實 驗室自行量測,藉由此兩大部分完成加速度計各參數的量測;靈敏度(mV/G)、頻寬(Hz)、 雜訊(mg/√Hz)、耦合度(%)等。 4.1.1 結構量測 計畫使用國家晶片設計中心(CIC)[12]量測項目如圖 33(a)(b) (a) (b) 圖 33 國家晶片中心儀器(a) 白光干涉儀[12],(b) MMA 動態分析儀[12]30
(a) 白光干涉儀:
使用 CIC 白光干涉儀(White Light Inteference)如圖 33(a),量測此物理量的目的,如 前述主要建立此製程中結構與感測懸臂尺寸對翹曲量的資料庫,並從翹曲量判斷沾黏現 象的嚴重與否。
(b) 動態分析儀:
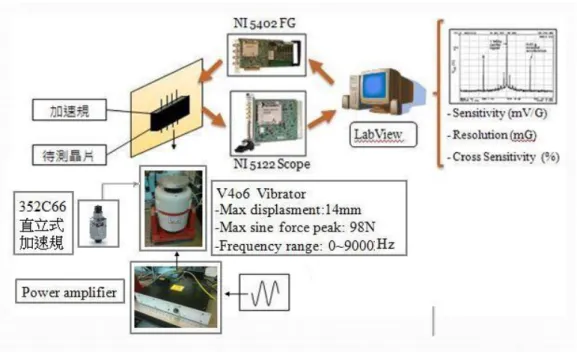
使用 CIC 動態分析儀(MEMS Motion Analyzer)如圖 33(b),藉由帄面頻率響應的表 現,驗證是否與理論的懸吊系統彈簧 K 值相符,暫態響應則能觀察系統的運動情形以及 懸吊系統在微小位移量時是否維持線性的表現。 4.1.2 訊號量測 本實驗室(MEMS Lab)將自行架設一加速度計量測帄台,如圖 34、圖 35,已完成 初步架設,正進行測詴階段。本訊號量測帄台由六個部份組成; 1. 電腦 2. 20MHz 的任意波型產生器 NI 5402 3. 14Bit 100MHz 高解析度示波器 NI 5122
4. 小型振動機(含功率放大器)(Vibration Test System) 5. 352C66 小型直立式加速度規(含 power unit) 6 波形產生器
31
圖 34 加速度計量測帄台
圖 35 三維載台及小型振動機
量測訊號時,先將製作好的加速度計安置在電路板上,由電腦中程控式軟體 NI
Labview 發出指令,讓 NI5402 透過一反相器(Inverter),將兩個高頻訊號輸入至加速度計 中,經由 V406 小型振動機給予加速度至電路板,透過 NI5122 同步觀察加速度計以及市 售 352C66 直立式加速規的輸出訊號波形,以量測各訊號,此量測帄台最大的好處在於 可同步觀察訊號波形,且不用再另外購買一昂貴的頻譜儀,透過 LabView 軟體內自己寫
32 好的程式搭配波形產生器 NI 5402 與示波器 NI 5122,即可得到一虛擬頻譜儀,此頻譜 儀是在 On-Wafer test 階段時所需要的,在沒有後端的解調電路時藉由頻譜來讀出靈敏度 (Sensitivity)、解析度(雜訊)(Resolution)、非線性度、耦合度(Cross Sensitivity)等重要數據。 (1) 靈敏度(Sensitivity): 將加速規的感測懸臂灌入較高頻之訊號(可以有較低之阻抗),將輸入之訊號與量測 訊號作調變,接著利用傅立葉由時域轉換成頻域即可較好讀出量測的訊號,將所有量到 之訊號與加速度值作圖,靈敏度及為此圖之線性回歸線的斜率,如圖 36 所示。 圖 36 靈敏度量測示意圖 (2) 耦合度(Cross Sensitivity): 給此加速規某軸加速度,量測此軸與靈敏度和另一軸靈敏度,將兩數值相除取百分 比即為耦合度,例如給予 Y 軸加速度,量測X軸之靈敏度,將此靈敏度除與 Y 軸之靈 敏度即為 Y 對 X 的耦合度,如圖 37。 圖 37 耦合度量測示意圖
33 (3) 動態範圍(Dynamic Range): 量測此加速規最高可以量到的加速度如圖 38,定為動態範圍,通常超過動態範圍 時波形會改變,峰值會被截掉的現象產生。 圖 38 動態範圍量測示意圖 (4) 非線性度(Nonlearity): 做出靈敏度的圖之後,繪出其回歸線,將所有量測出的點與回歸線的差做均方根處 理,再將此值除以最大的電壓輸出,如圖 39。 圖 39 非線性度量測示意圖
34
4.2 結構量測
4.2.1 結構量測動態影像圖 將詴片破片後,以雙面膠黏貼在 X 方向致動器上,給予足夠的電壓及共振頻率,在 MMA 動態分析儀底下,可掃頻在螢幕上看到此動畫圖,如圖 40。 圖 40 雙軸微加速規動態影像圖35
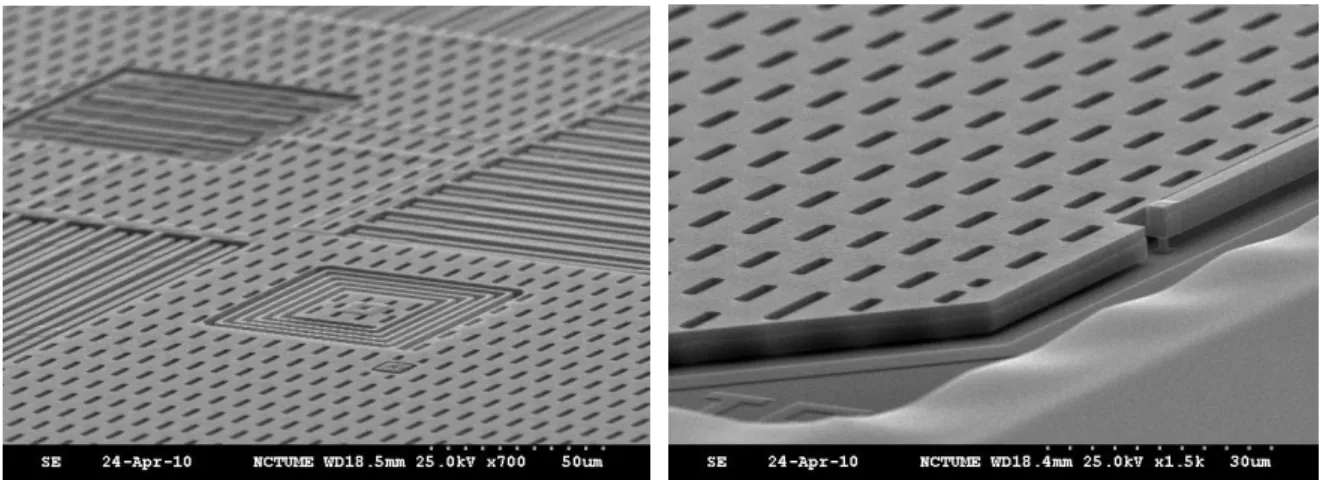
4.2.2 結構 SEM 圖
圖 41 主結構 SEM 圖
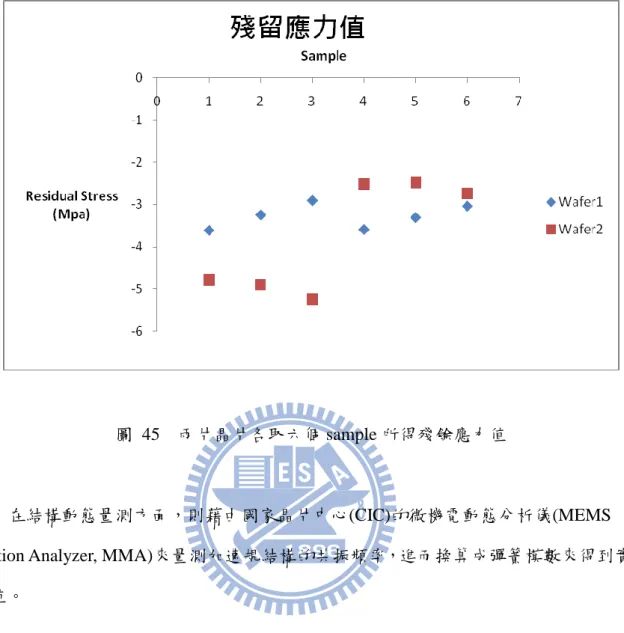
36 4.2.3 結構量測結果 首先,為了得到殘餘應力值,我們藉由國家晶片中心的白光干涉儀,經由非接觸式 的量測方式,在干涉條紋下得到表面輪廓圖如圖 43,在經過輪廓萃取後可得表面輪廓 之剖面圖,透過表面曲率與應力值的關係,我們採用 curve fitting 的方式來得到實際的 殘留應力大小如圖 44、圖 45,帄均殘餘應力值約為-3.43Mpa。 圖 43 表面輪廓圖 圖 44 經 curve fitting 後所得曲率圖
37
圖 45 兩片晶片各取六個 sample 所得殘餘應力值
在結構動態量測方面,則藉由國家晶片中心(CIC)的微機電動態分析儀(MEMS Motion Analyzer, MMA)來量測加速規結構的共振頻率,進而換算成彈簧模數來得到實際 K 值。
而在機台參數設定的部分,我們使用 10 倍的鏡頭,並給予壓電致動器 30V 的正弦 波訊號,取 15 個 phase 作量測,經掃頻過後所得頻率與振幅的關係如下圖 46、圖 47, 在 X 及 Y 方向上共振頻率皆為 4350Hz。
38
圖 46 X 方向(感測軸)共振頻率
39 4.2.4 結構可動率估算 在兩片晶片當中,我們各取數個相同設計的結構體來觀察實際可動的情況,利用 MMA 提供的光學影像下,如同前述的動畫圖,可粗略估計本次設計的成功率。其中第 一片晶片在 49 的樣品之中有 13 個確實可動,成功率為 26.5%,而第二片晶片在 50 個 樣品中有 39 個確實可動,成功率為 78%。以目前的良率來看還是處於較不穩定的狀態。 圖 48 可動率分析圖
4.3 輸出特性量測
4.3.1 加速度計實量測展示 下方幾張圖為實際上電來展示開發的加速度計, 圖 49 (a)為橫向(X 向)左右來回的 運動,圖 49(b)則為縱向(Y 向)前後來回的運動,由示波器可看到兩方向波形對應的情 形。其中感測軸訊號會明顯較大,而由於人手的運動方向並非完全帄行加速度計方向及 原本加速度計的耦合影響,所以非感測軸也會有些許的訊號反應。圖 50 則展示了此加 速度計的一種運用情境──傾斜感測,即當加速度計有一傾斜角時,相對應軸的訊號會 因為重力加速度的變化而發生改變,圖 50(a)為左右傾斜,圖 50(b) 則為前後傾斜。40 (a) (b) 圖 49 (a)橫向左右來回的運動,(b)縱向前後來回的運動 (a) (b) 圖 50 (a)左右傾斜,(b)前後傾斜 4.3.2 靈敏度與非線性度 如圖 51,雙軸加速度計在受到外界給予 23Hz,+/-1G 加速度時的輸出,為一正弦 波符合預期,靈敏度 X 軸為 318(mV/G)、Y 軸為 312(mV/G),約可達 Reference 加速度 計的 3 倍(Reference 約 100mV/G)如圖 52、圖 53;在+/-5G 的量測範圍內,X 軸、Y 軸 非線性度表現極佳。
41
圖 51 (a) X 軸 與 (b)Y 軸 輸出 ( Shaker +/- 1G @ 23Hz)
圖 52 X 軸 靈敏度 318 mV/G ( 0 ~ 5G @ 23Hz)
42 4.3.3 動態範圍 動態範圍泛指此加速度計可量測的最大範圍,如前圖 52 圖 53 雙軸靈敏度數據可 看出,最大範圍到+/-5G 都可維持完全線性,已超過規格要求的+/-3G;另外載台提供到 5G 以上加速度時則會因訊號線的晃動產生波形異常,如圖 54,故目前的量測帄台會造 成 High G 的非線性表現,此非加速度計本身產生,須由量測帄台端加以改進。 圖 54 訊號線的擾動影響震動帄台 4.3.4 耦合度 避免他軸的耦合為雙軸加速度計中重要的課題,故希望各軸耦合度可以做到±1%以 內,如圖 55 圖 56,此加速度計的 Y 對 X 耦合度(Y to X cross Sensitivity)為 14.5%,X 對 Y 耦合度(X to Y cross Sensitivity)為 14.9%,目前階段所量測到較高的耦合度除了雜 訊的影響外,大部分來自於 COB 板對準的精度,如圖 57,COB 板的 XY 軸對實際的 量測軸旋轉偏移 3°,就已可造成加速度計天生具有 5.2%的耦合度(不論 X 對 Y 或 Y 對
43
圖 55 Y 對 X 耦合度 14.5 % (Y 方向震動@23Hz)
44 圖 57 COB 板示意圖 表 5 偏轉角度與耦合度關係表 Alignment Rotation 3° 6° 9° 12° 15° Cross Sensitivity 5.24% 10.5% 15.8% 21.3% 26.8% 4.3.5 自我測詴 加速度計質量塊的外圍設計有間隙型的致動器(Gap-Closing Actuator),可提供靜電 力使質量塊產生一微小的位移,如圖 58,給予 2.5V 的壓差時,X 軸與 Y 軸各可得到 約 160~180mV 的變化,等效相當於受到 0.55 ~ 0.6 G 加速度時產生的位移,受限於製程 處於開發階段,由表 6 可看出同一片晶圓的 die-to-die 變異量目前還偏高(超過 13%),
45
模擬值等效加速度約 0.58G 落於帄均值附近,整體而言,在未提供外界擾動時,Self-Test 可成功造成質量塊的移動,提供一個量產流程中簡單驗證的機制。
圖 58 自我測詴結果 (X: -160mV Y: +170mV)
表 6 Self-Test 結果
Sensitivity ( mV/G ) Self-Test ΔV (mV) Effective Acceleration (G)
item X Y X Y X Y
Simulation 300 300 174 174 0.58 0.58
sample #1 295 290 177 160 0.60 0.55
sample #2 313 319 180 160 0.58 0.50
46 4.3.6 環境震動影響 不如預期的,量測的難度相當高,載台與載具稍有偏心或是訊號線固定不佳皆會使 震動波形產生偏差,此會造成稍高 G 值( > +/- 3G )量測時的誤差,如圖 59 為+/- 4G 量 測帄台受到訊號線擾動所造成的波形異常,使得量測範圍受限制,須再加以改善訊號線 的配置與固定並盡可能輕量化整個量測板。 圖 59 固定不良時的輸出( Shaker +/- 4G @ 23Hz) 4.3.7 環境光的耦合 量測中,實驗室日光燈會對加速度計產生一個 120 Hz 的耦合如圖 60,使其在靜置 時即載入一不要的訊號如圖 61,可將燈光關閉或為加速度計加上黑色遮罩以隔絕光對 加速度計的耦合,此現象可在封裝完成後避免。
47
圖 60 實驗室日光燈對加速度計耦合的頻譜 (120 Hz)
48
第五章 結論
5.1 總結
5.1.1 改進部分 再修改設計方面,兩端固定的感測懸臂設計能完全避免側向沾黏現象的發生,而製 作流程部分修改後,殘餘應力由張應力變為壓應力(約在-2~-5MPa),同時不必要的製程 缺陷也一併改善,提升製程的品質和穩定度。訂定尺寸設計規範,之後的設計可遵循此 規範, 避免不必要的錯誤產生。最後是完成加速規初步整合製作,已成功打線及封裝。 5.1.2 結構量測 利用白光干涉儀量測出結構的翹曲量,進而得知結構的殘留應力,這次實驗帄均殘 餘應力約為-3.43Mpa,偏向輕微的壓應力;而藉由 MEMS Motion Analyzer (MMA)可先 觀看結構的可動率,這次在 99 個樣品中有 52 個可正常作動總良率約為 52.5%;同時利 用 MMA 可量測雙軸加速規兩軸之共振頻率,X 及 Y 方向共振頻率皆為 4350Hz,再次 驗證了對稱式懸吊雙軸的彈簧常數相等。 5.1.3 輸出特性量測 實驗所量測之 X 軸靈敏度為 318(mV/G),Y 軸為 312(mV/G),另外動態範圍最大到 +/-5G 都可維持完全線性,這兩點跟當初所訂定之規格 300mv/G、+/-3G 皆相符。不過 在耦合度方面,因 COB 板對準的精度和載台擺放角度皆會影響到實際值,目前來說 14.5%、14.9%的耦合度略顯偏高。此外,我們成功達到致動器自我驅動之效用,以及發 現到環境中的光干擾也會提供個 120Hz 的訊號影響到實際量測的結果。49
5.2 未來工作
首先為設計方面,會在雙軸加速規之懸吊系統與感測懸臂配置的改進 ,並且開始 設計三軸加速規。 製程方面,會繼續調整退火製程參數以讓殘留應力更接近於零,來得到最大的感測 面積,同時提高製程帄台的穩定性以達到量產目的。 量測方面,則會著手改善整個訊號量測的量測帄台,過多的訊號線以及無法旋轉的 量測載台都可以再做更新,以降低雜訊和提升訊號精確度。最後是經過封裝後,會再去 做一次量測,量測最後產品的規格。50
參考文獻
[1] WTC, http://www.wtc-consult.com/english/mems-microsystems/ [2] Analog Device Inc, http://www.analog .com
[3] F. Rudolf, A. Jordon, J. Bergqvist and H. Leuthold, “Precision Accelerometer with ug Resolution”, Sensors & Actuators, A21-A23, 1990, p.297-302.
[4] Timothy J. Brosnihan, James M. Bustillo, Albert P. Pisano, Roger T.Howe, “Embedded Interconnect and Electrical Isolation for High-Aspect-Ratio, SOI Inertial Instruments,” In : Technical Digest of the 9th International Conference on Solid-State Sensors and Actuators; Transducers, 1997, p.637-640.
[5] Tracy Hudson, Sherrie Holt, Paul Ruffin, Jim McKee, Michael Whitley, Michael Kranz, Eric Tuck, “Embedded Interconnect and Electrical Isolation for High-Aspect-Ratio, SOI Inertial Instruments,”IEEE,2006.
[6] Huo Luo, Gang Zhang, L. Richard Carley and G. K. Fedder, “A Post-CMOS Micro- machined Lateral Accelerometer,” in IEEE Journal of Micromechanical Systems, Vol 11, No.3, June 2002.
[7] Analog Devices ADXL330 Three-Axis 2g MEMS Accelerometer Process Review, chipwork, 2006.
[8] Howard R. Samuel, David C. Holloncher, Michael Judy, Thor Juneau, “Reducing Offset in Accelerometers,” US-Patent No.6892576, May 17 2005, filed July 18 2003.
[9] 蔣鎧宇,”多晶矽電容式微加速規的研發”,交大機械所碩士論文,2009
[10] Stephen D. Senturia, “Microsystem Design,” Kluwer Academic Publishers, Boston, 2001, p.520-523.
[11] 精材ASE MEMS Status Update, 2001
![圖 4(a)所示為 Brosnihan 在 1997 年提出的 SOI-MEMS 電容感測器[4],其先利用 SOI(Silicon On Insulator) Wafer 製作好 CMOS 電路,同時製作感測結構,由於 SOI 本身 的特色造成結構深達 45um,大大提升了電容的感測面積,也由於其性能表現良好,一 直到 2006 年仍有許多發展在 CMOS 帄台上的 SOI-MEMS 提出改進的製程,如圖 4 (b) 所示,Hudson 也提出 SOI-MEMS 慣性感測器[5],並在 CMOS 帄](https://thumb-ap.123doks.com/thumbv2/9libinfo/8368352.177345/16.892.182.745.834.1054/年提出測結構由本身特色造成結構深達有許多發展在帄台上的帄.webp)
![圖 28 精材 Si Cap & Glass frit 封裝流程[11]](https://thumb-ap.123doks.com/thumbv2/9libinfo/8368352.177345/37.892.117.788.483.962/圖28精材SiCapampGlassfrit封裝流程11.webp)