國 立 交 通 大 學
土 木 工 程 學 系
碩 士 論 文
以最小二乘平面套合法進行
空載與車載光達點雲套合
Registration of Airborne Lidar and Mobile Lidar
Point Clouds Using Least Squares 3-D Surface
Matching
研 究 生:黃世涵
指導教授:張智安
以最小二乘平面套合法進行空載與車載光達點雲套合
Registration of Airborne Lidar and Mobile Lidar Point Clouds
Using Least Squares 3-D Surface Matching
研 究 生:黃世涵
Student:Shih-Han Huang
指導教授:張智安
Advisor:Tee-Ann Teo
國 立 交 通 大 學
土 木 工 程 學 系
碩 士 論 文
A ThesisSubmitted to Department of Civil Engineering College of Engineering
National Chiao Tung University in partial Fulfillment of the Requirements
for the Degree of Master in
Civil Engineering July 2012
Hsinchu, Taiwan, Republic of China
I
以最小二乘平面匹配法進行空載光達與車載光達點雲套合
學生:黃世涵 指導教授:張智安
國立交通大學土木工程學系
中文摘要
光達(Light Detection and Ranging, LIDAR)為近年來快速發展的測距儀器,光達利用
短時間內發射大量雷射脈衝對空間中的物體進行測距,並獲取雷射脈衝在物體表面反射
點的三維坐標,大量的三維坐標點位集合為光達點雲資料(Point Clouds)。光達可裝置在
不同載具,將不同載具或不同測站間的資料轉換至同一坐標系統,並使重疊區有一致的
幾何特性,以整合點雲資料進行後續應用的行為即稱為光達點雲套合。
本研究採用最小二乘平面匹配法(Least Squares 3-D Surface Matching)進行空載及車
載光達點雲套合。研究中使用共軛平面特徵建立坐標轉換關係,並以最小二乘法求解轉 換參數達到點雲套合的目標。為建立平面特徵間的共軛關係,本研究採用資料網格結構 化並使用特徵向量分析將網格結構中的點雲轉換為平面特徵,最後利用角度及距離門檻 產生候選共軛平面。 本研究中使用一組模擬資料以及兩組真實資料進行點雲套合,為了解點雲密度比與 套合成果之關係,先使用模擬點雲資料在已知轉換參數環境下進行套合分析;真實點雲 資料套合部分使用空載光達點雲以及車載光達點雲,空載光達點雲由 Optech ALTM 30/70 掃描,資料範圍為台北市政府周邊都市區;車載光達點雲由 Optech Lynx 掃描,資 料範圍為台北市光復南路之部分路段。真實點雲資料須先以航帶間套合消除資料內航帶 間誤差,接著進行車載光達與空載光達之間套合。 成果分為模擬資料成果以及真實資料成果,模擬資料部分顯示出資料密度影響套合 成果,將點雲密度調降為 1/10 時,套合誤差將放大為兩倍;在真實資料套合實驗成果中, 進行航帶間點雲套合可將空載光達航帶間之誤差由原始資料的 9cm 改善為 4.7cm,而車 載光達資料航帶間誤差則由原始資料之 40cm 降低為 4cm;於空載光達對車載光達點雲
II
套合中,原始點雲誤差為 84cm 也於套合處理後降低為 5cm。經過套合處理後,資料間
誤差皆明顯降低。
III
Registration of Airborne Lidar and Mobile Lidar Point Clouds
Using Least Squares 3-D Surface Matching
Student:Shih-Han Huang Advisor:Tee-Ann Teo
Department of Civil Engineering
National Chiao Tung University
Abstract
LIDAR (Light Detection and Ranging, LIDAR) is a rapid development technology. Lidar
emits a large number of laser pulses in a short time to measure the three-dimensional
coordinates of the object. These three-dimensional coordinates acquired by lidar called point
clouds. Lidar can be equipped with different platforms. In order to combine lidar data from
different platforms, point clouds registration is applied to improve the geometrical consistence
results between lidars.
In this study, we proposed a least squares 3D surface registration process to register two
different point cloud datasets. First, we divide the point clouds into a 3-D voxel structure.
Then, we use Principle Component Analysis to calculate the normal vector of plane in
eachvoxel. The distance and angle between planes are analyzed to construct the candidate
conjugate planes, and finally the unknown transformation parameters are solved by least
squares adjustment.
This study use a simulation data and two real data in point clouds registration. In order to
analyze the effect of point density in registration, the simulation data simulates different
conditions and estimates the errors. The real data are airborne and mobile lidars which were
acquired by Optech ALTM 30/70 and Optech Lynx in Taipei city.
In the experiment result, the simulation analysis indicates that registration error is
IV
between airborne lidar strips is improved from 9cm to 4.7cm. The registration error of mobile
lidar between different paths is improved from 40cm to 4cm. Finally, the registration error of
airborne and mobile lidars is improved from 84cm to 5cm. .
V
致謝
在交大的兩年研究生活終於到了最後,過去的兩年裡,從一開始進入研究所的惶惶 不安到最後的依依不捨,每一天總是讓我覺得充實。感謝指導教授張智安老師願意指導 我的研究,雖然老師的指導方式較為嚴苛,但畢業前回首過去兩年來的訓練,總覺得十 分值得,多虧了這些紮實的訓練,我才能在研究上獲得成就感以及自信,沒有老師的關 心與指導,這本論文也勢必無法完成。另外感謝口試委員林玉菁老師、林士淵老師以及 史天元老師對這本研究論文的寶貴意見,讓我從不同的觀點看見這本論文不足的地方。 感謝信瑜學長在碩一時候的照顧,讓我能夠快速融入實驗室的氛圍。謝謝實驗室曾 經一起奮戰的同學昭儀及阿珊,回想過去每次 meeting 前的爆肝以及一起努力 ACRS 的 日子讓我記憶深刻。謝謝以諾學弟口試前以及最後送論文前的校稿以及女大師學妹為實 驗室帶來的歡樂氣氛,祝福同為張老師實驗室的同學、學弟妹們未來的人生一帆風順。 除了研究室的同學們以外,也要感謝訓訓哥學長及小悶學長兩年來的照顧,從你們 身上我學到了很多研究以外的事情,也讓我知道我的個性不足的地方,祝福兩位學長未 來工作順利。也謝謝兩位好室友濃哥及狗兄,未來的人生裡絕對不會忘記我們 781 寢曾 經開過的玩笑、騎車衝過的地方,之後等我當完兵,我一定會找時間回來衝蘇花公路的! 謝謝阿翟,雖然都沒有機會吃到好吃泰式雞排便當,但還是謝謝你過去給我過的建議。 謝謝伶蒨及陳阿肥在這兩年間的照顧,你們兩個實在太好笑了! 另外特別感謝我的女朋友李勻兩年來的陪伴,謝謝你能聽我分享全部開心或不開心 的事情,也在我找不到方向的時候給我指引,雖然你已經在工作了我還要當兵,但在未 來的人生裡我一定會努力,也希望你能夠繼續陪在我走下去。 最後謝謝我的家人,謝謝我的爸爸在過去給我很多做人處事方面的建議。謝謝我的 媽媽總是叮嚀我很多生活方面的事情。謝謝兩個妹妹能夠幫忙分攤家裡的事情。我能夠 這麼順利的長大到完成學業,最大的助力還是你們,未來的人生我會努力回饋,也希望 爸媽要好好保重身體。 感謝曾經幫助、關心及支持過我的每一個人,我終於畢業了。VI
目錄
中文摘要 ... I Abstract ... III 致謝 ... V 目錄 ... VI 圖目錄 ... VIII 表目錄 ... X 第一章 前言 ... 1 1-1 研究背景及動機 ... 1 1-2 研究目的 ... 2 1-3 文章架構 ... 2 第二章 文獻回顧 ... 3 2-1 資料導向模式 ... 3 2-1-1 使用特徵類型 ... 3 2-1-2 特徵匹配 ... 7 2-1-3 建立數學模型 ... 8 2-1-4 坐標轉換 ... 12 2-2 模型導向模式 ... 12 2-3 空載光達與車載光達套合 ... 13 第三章 研究方法 ... 14 3-1 點雲套合流程 ... 14 3-2 資料篩選 ... 15 3-3 資料結構化 ... 19 3-4 特徵資料表示 ... 21 3-5 共軛特徵搜尋 ... 23VII 3-6 建立數學模型 ... 26 3-7 坐標轉換 ... 29 第四章 實驗資料 ... 30 4-1 設計模擬資料 ... 30 4-1-1 模擬資料來源 ... 30 4-1-2 模擬資料分析項目 ... 31 4-2 設計真實資料 ... 31 4-2-1 真實資料來源 ... 32 4-2-2 真實資料分析項目 ... 36 第五章 實驗成果 ... 39 5-1 模擬資料套合成果 ... 39 5-2 真實資料套合成果 ... 40 5-2-1 空載光達航帶間套合成果 ... 40 5-2-2 車載光達車道間套合成果 ... 53 5-2-3 空載光達對車載光達套合成果 ... 68 第六章 結論與建議 ... 76 參考文獻 ... 78
VIII
圖目錄
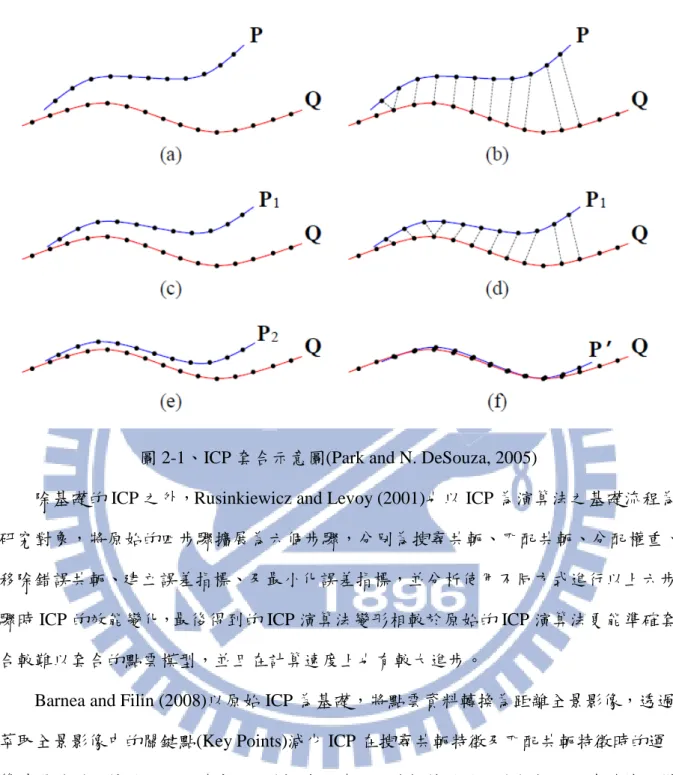
圖 2-1、ICP 套合示意圖(Park and N. DeSouza, 2005)….………...4
圖 2-2、線段套合示意圖(Habib, Ghanma et al., 2005)………...5
圖 2-3、加入光達強度共同解算示意圖(Akca, 2007)………...………7
圖 2-4、共軛點匹配(Rusinkiewicz and Levoy, 2001)………..……….7
圖 2-5、共軛線段匹配(Habib, Kersting et al., 2008)………...8
圖 2-6、共軛平面匹配……….8 圖 2-7、共軛線段示意圖………...10 圖 2-8、點雲分類圖(Hansen et al., 2008)………...……….13 圖 3-1、左右車道路面重疊狀況示意圖………...15 圖 3-2、左右車道點雲資料點數統計影像………...16 圖 3-3、重疊區影像………...17 圖 3-4、萃取邊界線並膨脹為面特徵影像………...18 圖 3-5、車載光達點雲左右車道保留區域………...19 圖 3-6、資料結構化示意圖………...20 圖 3-7、點雲資料轉換為平面特徵示意圖………...23 圖 3-8、搜尋共軛門檻示意圖………...24 圖 3-9、共軛特徵匹配………...25 圖 4-1、模擬資料來源………...30 圖 4-2、模擬資料建置流程圖………...31 圖 4-3、各航帶點雲資料範圍展示………...33 圖 4-4、空載光達點雲資料………...33 圖 4-5、車載光達掃描路徑………...34 圖 4-6、車載光達點雲資料………...35 圖 4-7、檢核平面框選………...37
IX 圖 4-8、檢核點(紅色X)點選示意圖………38 圖 5-1、模擬資料坐標檢核………...39 圖 5-2、空載光達參考資料選定………...41 圖 5-3、檢核平面分布………...42 圖 5-4、檢核平面剖面圖………...45 圖 5-5、多航帶點雲套合檢核平面分布………...47 圖 5-6、多航帶套合點雲剖面………...52 圖 5-7、平面特徵距離統計變化圖………...54 圖 5-8、求解參數圖………...54 圖 5-9、車載光達資料剖面………...65 圖 5-10、車載光達資料檢核點分布狀況……….66 圖 5-11、車載光達檢核點誤差向量圖……….67 圖 5-12、空載光達與車載光達光復南路資料重疊圖……….69 圖 5-13、空載資料與車載資料套合剖面……….74
X
表目錄
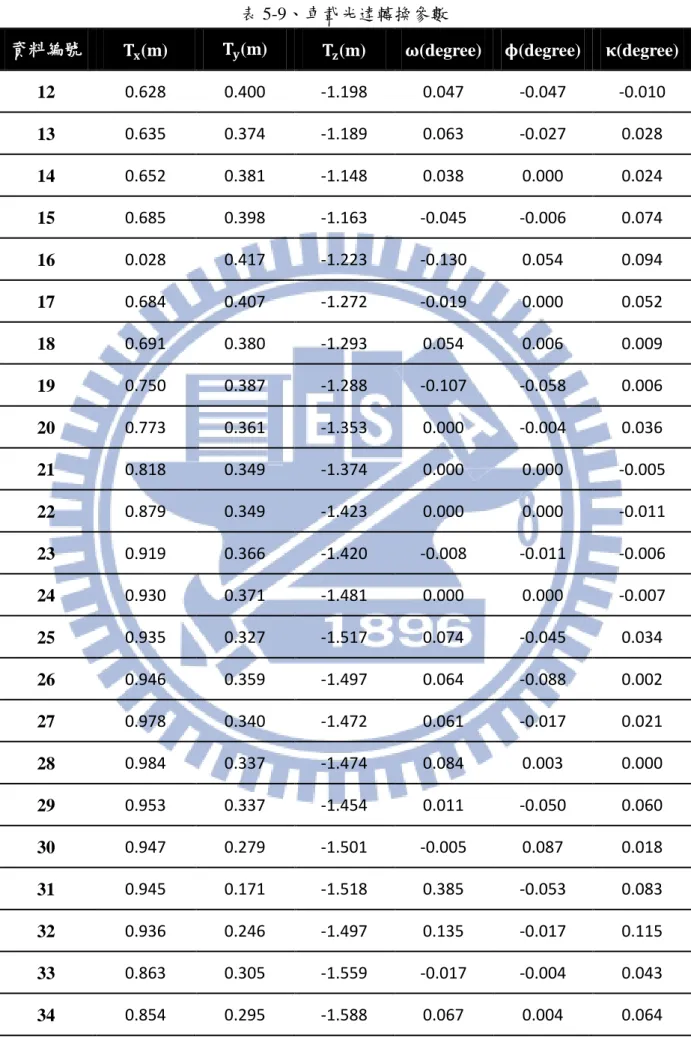
表 4-1、模擬資料轉換參數………..……….31 表 5-1、LS3D 及 ICP 比較……….40 表 5-2、參考資料匹配平面特徵距離統計………...………42 表 5-3、九號航帶至八號航帶轉換參數………...………42 表 5-4、參考資料之檢核平面統計量………...………43 表 5-5、航帶轉換參數………...………45 表 5-6、空載光達航帶間匹配平面特徵距離統計………...……46 表 5-7、多航帶間檢核平面統計量………...………47 表 5-8、點雲篩選前後點數統計………...………53 表 5-9、車載光達轉換參數………...………56 表 5-10、車載光達偵測平面特徵距離統計變化………...………58 表 5-11、車載光達資料檢核點統計資料…..………...………67 表 5-12、平面特徵套合前後高程參數差……….………70 表 5-13、檢核平面套合前後高程參數差……….…701
第一章 前言
1-1 研究背景及動機
光達(Light Detection and Ranging, LIDAR)或稱雷射掃描儀,是近年來發展較快速的
主動式測距儀器,光達在短時間內發射大量雷射脈衝,並利用偵測接收到雷射脈衝回訊
的時間差或相位差進行測距(Wehr and Lohr, 1999),最後獲得該雷射脈衝在空間中所撞擊
物體的表面三維空間資訊。藉由光達所獲得的大量雷射脈衝回訊在空間中可以轉換為大 量的三維坐標點觀測量,並形成如同雲一般的點群用以描繪出物體表面的形狀,因此稱 光達獲得的離散點資料為點雲資料(Point Cloud)。 光達進行掃描時可視使用者需求使用不同的載具搭載,並能夠獲取不同類型的資料, 且依據載具的定位方式不同,獲取的點雲資料坐標系統也不盡相同,一般可粗略將載具 分類為飛行載具及地面載具。利用飛行載具搭載的空載光達,配合全球定位系統(GPS) 及慣性導航系統(INS)在進行掃描同時進行載具的定位及定向,可以獲取大範圍的點雲資 料,由於掃描方式為由空中往地面掃描,資料內的主要掃描之地物類型為地面、建物屋 頂;此類型點雲由於載具飛行高度的關係,能夠大範圍作業以獲取掃描物表面資訊,主 要呈現地物的頂部結構,但因此常用建物點建立屋頂結構較細緻的三維都市模型,或使 用地面點建立大範圍數值地表模型。 而使用地面載具搭載的光達可細分為固定站的地面光達以及利用可移動載具搭載 的車載光達。固定站地面光達主要使用區域坐標系統呈現掃描資料,而車載光達在動態 取樣的過程中,除了使用全球定位系統(GPS)及慣性導航系統(INS)外,並使用里程計輔 助定位及定向,這兩種地面載具光達雖無法一次收集大範圍掃描物的表面資訊,但由於 掃描距離通常較短,點雲密度較高,較能細緻描繪物體外表的形狀,而地面光達的主要 掃描地物為道路及建物牆面結構等,常用於建置建築物精緻模型。 由於光達所使用的載具不同,且掃描距離、點雲密度及坐標系統各不相同,常發生 一次掃描只能獲取某一部分資料的狀況,因此為獲得完整的物體表面資訊,必須進行將 多個測站或多種載具的掃描資料轉換到同一坐標系統的前處理,才能進行資料的後續利
2 用,而這種轉換多組點雲資料之坐標系統至同一坐標系統下的作業即稱為點雲套合 (Point Registration)。 點雲套合除應用於合併多組資料為一完整掃描資料以外,也能夠用於消除點雲資料 之間的誤差,由於點雲之空間三維坐標是利用對載具的直接地理對位成果計算得知,當 載具的定位成果有誤差時,對同一目標物的掃描就可能獲得不同的三維空間坐標,此時 能夠利用點雲套合求取兩組資料之間的相對轉換參數進而讓兩組資料有一致性的掃描 成果。
1-2 研究目的
由於來自不同載具的點雲資料屬於不同的坐標系統,必須組合拼接以進行後續利用, 而過去文獻較少於點雲密度與套合之成效進行探討,故本論文使用最小二乘平面套合法(Least Squares 3-D Surface Matching)(Gruen and Akca, 2005)方法進行空載光達及車載光
達之點雲套合,探討不同點雲密度在套合工作上的影響,並且發展自動化的點雲套合流 程。基於此研究目的之下,本論文之研究貢獻為完成分析不同密度之點雲對套合的影響, 並且建立一完整的自動化套合點雲程序。
1-3 文章架構
本文共分為六個章節,章節內容分別說明如下: 第一章:探討本文研究背景、動機及研究目的。 第二章:探討點雲套合之文獻所使用的方法以及其特性。 第三章:介紹本文章所使用研究方法之各步驟。 第四章:介紹本文章使用的實驗資料。 第五章:介紹本文實驗成果並提出分析。 第六章:本文實驗成果之結論與建議。3
第二章 文獻回顧
資料套合相關的文獻可以依資料的類型分為二維套合與三維套合,影像套合即是一 種最常被使用的的二維套合,而曲面套合就是一種三維資料套合。在本研究中主要著重 於三維點雲資料套合的討論,因此將點雲套合之文獻細分為:(1)資料導向模式(Data driven)、及(2)模型導向模式(Model driven),以下章節詳述之。2-1 資料導向模式
資料導向之點雲套合主要以改正光達點雲資料之間的差異以進行套合工作,這種 套合方式主要強調使資料之間的誤差消除,屬於一種區域性的點雲資料坐標轉換,必須 再將區域套合過的資料進行絕對坐標轉換使點雲資料轉換至絕對坐標系統上。資料套合 流程可細分為四個子步驟,首先決定使用於套合控制的特徵類型,一般來說常被使用的 幾何特徵有點特徵、線特徵及面特徵,幾何特徵的偵測複雜度與其提供的控制強度成反 比,需要越複雜萃取程序的特徵將提供越強的控制力,在決定需使用的控制特徵後,需 對進行套合的兩組資料進行特徵匹配,接著建立控制特徵之間的數學轉換關係並求解轉 換參數,最後將轉換參數套用至被轉換的點雲資料上使兩組資料之坐標系統一致。以下 以各個子步驟進行文獻回顧。
2-1-1
使用特徵類型
(1) 點特徵
點特徵應用最廣的研究為由 Besl and McKay (1992)、Yang and Medioni (1992)及
Zhang (1992)發展的疊代最鄰近點演算法(Iterative Closest Point, ICP),演算法之基礎流程
大致可分為四個步驟:搜尋共軛、匹配共軛、建立誤差指標、及最小化誤差指標。而其
原理為在兩點群 P 及 Q 中尋找最鄰近的點作為共軛點對,建立共軛對之間的轉換關係並
求解轉換參數,接著套用轉換參數在 P 點群上得到P1點群,再將P1及 Q 點群重複以上步 驟建立轉換關係並求解轉換參數,疊代運算至第 n 次轉換與第 n+1 次轉換的點群中誤差
4
雲套合工作(圖 2-1)。
圖 2-1、ICP 套合示意圖(Park and N. DeSouza, 2005)
除基礎的 ICP 之外,Rusinkiewicz and Levoy (2001)也以 ICP 為演算法之基礎流程為
研究對象,將原始的四步驟擴展為六個步驟,分別為搜尋共軛、匹配共軛、分配權重、
移除錯誤共軛、建立誤差指標、及最小化誤差指標,並分析使用不同方式進行以上六步
驟時 ICP 的效能變化,最後得到的 ICP 演算法變形相較於原始的 ICP 演算法更能準確套
合較難以套合的點雲模型,並且在計算速度上也有較大進步。
Barnea and Filin (2008)以原始 ICP 為基礎,將點雲資料轉換為距離全景影像,透過
萃取全景影像中的關鍵點(Key Points)減少 ICP 在搜尋共軛特徵及匹配共軛特徵時的運
算時間並增加特徵匹配正確度,這種提升正確匹配共軛特徵的做法相較 ICP 中隨機取樣
最鄰近點作為共軛特徵的方式可以解出較正確的轉換參數且使整體運算時間降低。
在 ICP 點雲套合的應用方面,郭朗哲 (2009)也利用點雲套合進行地面光達資料的多
測站疊合,文獻中主要將覘標佈設在掃描實驗區中,利用覘標做為控制特徵以進行測站
5
(2) 線特徵
考量點特徵幾何特性較少,且由於光達點雲資料由點群組成,控制點點選作業之精 度易受光達點雲資料之點間距影響,若點之間距過大,則會造成點位辨識不易。除此之 外,控制點也容易因為光達足跡(footprint)影響資料內邊界線位置外擴或內縮,使用單點 作為控制特徵的點特徵套合可能產生隨機誤差,因此也有部分學者使用幾何特性較強且 較不容易受點位隨機誤差影響的線特徵進行套合。 Habib et al. (2005)提出利用線形特徵套合光達點雲資料與影像資料。線特徵主要從 兩種輸入資料中萃取,從影像中萃取線段的方式為人工點選線段端點,並加入點選中間 點增加觀測量,線段萃取後利用影像上的共軛線段建立共線方程式,以求解影像上線段 的物空間坐標;從光達點雲中萃取線段的方式為人工判定平面之結構物特徵,由鄰近且 法向量不同的平面相交獲取點雲中較可靠的線特徵資料。由兩種資料萃取出的線特徵經 過人工匹配後以七參數轉換及共線方程式可求解出影像資料與光達點雲資料之間的轉 換參數並完成套合。圖 2-2 為線段經過坐標轉換達到套合目標之示意圖。 圖 2-2、線段套合示意圖(Habib et al., 2005)除此之外,Jaw and Chuang (2008)提出使用三維直線特徵進行多測站地面光達點雲
套合的方式,此研究中將光達點雲轉換為距離影像,使用 Canny Edge Operator 及 Hough
Transform 自動萃取線特徵並加入人工輔助點選線段作為控制特徵,若條件足夠,則會
加入偵測點雲中的可靠平面相交產生正確度較高的線段。線段萃取之後利用共軛線段的
共線特性以及線段的端點坐標建立觀測方程式求解多測站之間的轉換參數,解算方式依
6
(3) 面特徵
除使用點特徵與線特徵之外,考量光達掃描方式為沿著物體表面進行掃描,因此使 用點特徵並擬合為平面特徵以進行套合的作法更能貼近光達掃描時的狀況,而將點資料 擬合為平面也能降低隨機誤差影響平面位置並獲得較點特徵與線特徵更豐富之幾何訊 息,以利套合作業進行。利用面特徵進行雲套合的文獻有 Rosenholm and Torlegard (1988)提出利用 DEM 做
為參考資料並與模型資料套合的理論,此文獻中主要使用資料的表示方式為 2.5D,也就
是在一個平面位置上只存在有一個高度值的資料表示法,在套合作業上與將平面資料表
示為 3D 之主要差異在於垂直平面特徵表示的能力,不適合使用在有垂直牆面的資料中。
至於數學模型部分,利用 2.5D 建立的數學模型採用共軛平面的高度差做為觀測量,因
此不易反應出真實兩平面於空間中的差異。
Gruen and Akca (2005)提出利用最小二乘法套合三維曲面(Least Squares 3-D Surface
Matching, LS3D)的方法,此文獻主要利用廣義高斯馬可夫模型將共軛平面特徵之間的歐 幾里得距離最小化以達到套合的目標,文中也提出搜尋共軛平面加速、精度驗證以及同 樣的數學模型使用在套合曲線上的可行性。 以 LS3D 演算法為基礎所發表的文獻則有 Akca (2007)提出除使用光達點雲本身幾何 特性的資訊進行套合以外、也加入光達點雲的反射強度資料,如圖 2-3,左圖為原始點 雲資料,右圖為使用此資料之幾何與輻射資訊形成之幾何平面(淡色平面)與輻射平面(深 色平面)。整合點雲資料本身的幾何與輻射特性進行套合工作將使此套合作業在某些資 料具有不豐富幾何特性時也能完成套合,例如文中的實驗成果的部分範例,牆面結構由 於平坦,幾何特性不明顯,但加入光達點雲反射強度則可避免解算參數困難的問題。
7 圖 2-3、加入光達強度共同解算示意圖(Akca, 2007) 除以上理論外,使用 LS3D 進行的實作應用則有 Akca et al. (2010)提出的利用 LS3D 進行模型資料的品質驗證。文獻中使用光達點雲資料做為驗證資料進行房屋模型資料的 品質驗證,透過使用 LS3D 套合光達點雲(點資料)與房屋模型資料(多邊形資料)之兩種不 同輸入資料,將套合後殘差較大的區域視為房屋模型細部結構缺陷或品質不佳的區域, 藉此套合可以找出大 範圍區域內的所有房 屋模型品質較差的部 分。Monserrat and Crosetto (2008)則使用 LS3D 演算法進行地面變形監測,研究方法是使用 LS3D 套合兩組 不同時間點進行掃描的光達點雲資料,藉由分析套合後殘差的量可以找出地形在兩時間 點之間的變化。
2-1-2
特徵匹配
進行偵測特徵後須將特徵進行匹配以建立共軛關係,一般使用篩選特徵條件須依使用特徵帶有之特性決定,以點特徵作為共軛特徵時,Besl and McKay (1992)使用點特徵
之間的距離作為篩選共軛點對的條件(如圖 2-4)。使用線段特徵時 Habib et al. (2008)則利
用線段之距離、夾角及重疊比率做為判斷共軛線段的篩選門檻(如圖 2-5)。而使用平面特
徵時,則可依據平面之距離及平面法向量之夾角作為篩選共軛平面之條件(如圖 2-6)。
8 圖 2-5、共軛線段匹配(Habib et al., 2008) 圖 2-6、共軛平面匹配
2-1-3
建立數學模型
建立數學模型時須考慮資料的表示方式以及使用的坐標轉換模式,大部分數學模型 都是使用最小二乘法求解轉換參數,不同的特徵除表示方式不同以外,也能加入不同的 約制條件,以下依使用特徵分別列出數學模型的建立方式以及其目標函式。(1) 點特徵數學模型
點特徵由於沒有多餘的幾何特性,通常考慮點坐標之間的差異做為數學模型的建 立基礎,以下以 Besl and McKay (1992)提出的數學模型為例說明。
9 文獻中表示任意兩點特徵P1及P2的方式為坐標系統原點至該點的向量如式 2-1。 𝑃1 ���⃑ = (𝑥1, 𝑦1, 𝑧1) 𝑃2 ����⃑ = (𝑥2, 𝑦2, 𝑧2) (式 2-1) 而文獻中利用d(P1, P2)(式 2-2)表示兩點P1P2之間距離。 d(P1, P2) = ‖𝑟���⃑ − 𝑟1 ���⃑‖ = �(𝑥2 2− 𝑥1)2+ (𝑦2− 𝑦1)2 + (𝑧2− 𝑧1)2 (式 2-2) 假設P1, P2為兩組不同資料中的共軛點,必須透過坐標轉換將兩組資料的坐標系統統 一,並使兩共軛點位於同一位置上,因此須設定一坐標轉換模式,原文獻內的坐標轉換 模式如下。 本文獻中考量點群坐標轉換帶有旋轉,使用尤拉角(Euler angles)進行坐標轉換效率 較低,且尤拉角坐標轉換系統為非線性系統,求解較為不易,因此本文之坐標轉換模式 使用四元數(Quaternion)系統,因為是線性系統,其求解較為簡易。 令一單位四元數(Quaternion)向量為𝑞����⃑ = [𝑞𝑅 0 𝑞1 𝑞2 𝑞3]𝑇,其中q0 ≥ 0且q02+ 𝑞12+ 𝑞32+ 𝑞42 = 1,可以構建旋轉矩陣如式 2-3。 R = �𝑞0 2+ 𝑞 12− 𝑞22− 𝑞32 2(𝑞1𝑞2− 𝑞0𝑞3) 2(𝑞1𝑞3+ 𝑞0𝑞2) 2(𝑞1𝑞2+ 𝑞0𝑞3) 𝑞02− 𝑞12 + 𝑞22− 𝑞32 2(𝑞2𝑞3− 𝑞0𝑞1) 2(𝑞1𝑞3− 𝑞0𝑞2) 2(𝑞2𝑞3+ 𝑞0𝑞1) 𝑞02 − 𝑞12− 𝑞22+ 𝑞32 � (式 2-3) 令平移向量為qT = [𝑞4 𝑞5 𝑞6]T,並且將坐標轉換套用在點P2上使之與P1疊合,並令 經過坐標轉換後的坐標位置殘差為V如式 2-4。 V = P���⃑ − [R(𝑞1 ����⃑)𝑃𝑅 ����⃑ + 𝑞2 ����⃑] 𝑇 (式 2-4) 目標函式為共軛點坐標的均方誤差f(𝑞⃑),如式 2-5。 f(𝑞⃑) =𝑁1 𝑝∑ �𝑃���⃑ − R(𝑞1 ����⃑)𝑃𝑅 ����⃑ − 𝑞2 ����⃑�𝑇 2 𝑁𝑝 𝑖=1 (式 2-5) 利用最小二乘法解算七個未知數(q0, 𝑞1, … 𝑞6)使全部共軛點之間的均方誤差最小化, 在共軛點對有 n 組之狀況下,自由度為n − 7,需最少有七組共軛點對才能求解。在求 解轉換參數使均方誤差達最小後其點雲即完成套合。
(2) 線特徵數學模型
使用線特徵的套合概念是使用端點或數個線段中點並建立直線方程式,再加入線特10 徵所特有的的共線條件式作為約制增加套合正確性,以下以 Habib et al. (2005)提出的數 學模型為範例。 令 一 組 共 軛 線 段 為 𝐴𝐴����, 𝐶𝐶���� 如 圖 2-7 , 其 中 𝐶𝐶���� 線 段 套 用 七 參 數 坐 標 轉 換 (x𝑇, y𝑇, zT, 𝑆 , ω, ϕ, κ)後可表示為 𝐶������且與 𝐴𝐴′𝐶′ ����線段重合,式 2-6 中等號左邊表示 𝐶𝐶����線段 上兩端點經過坐標轉換後落於 𝐴𝐴����線段上的關係,公式中 S 為尺度參數,R 為由三軸旋 轉角(ω, ϕ, κ)構成的旋轉矩陣,平移向量為(𝑥𝑇 𝑦𝑇 𝑧𝑇),等號右邊為線段方程式的參數表 示式。 圖 2-7、共軛線段示意圖 �𝑥𝑦𝑇𝑇 𝑧𝑇 � + 𝑆𝑆 �𝑥𝑦𝐶𝐶 𝑧𝐶 � = �𝑥𝑦𝐴𝐴 𝑧𝐴 � + 𝜆1� 𝑥𝐵− 𝑥𝐴 𝑦𝐵− 𝑦𝐴 𝑧𝐵− 𝑧𝐴 � + V �𝑥𝑦𝑇𝑇 𝑧𝑇 � + 𝑆𝑆 �𝑥𝑦𝐷𝐷 𝑧𝐷 � = �𝑥𝑦𝐴𝐴 𝑧𝐴 � + 𝜆2� 𝑥𝐵− 𝑥𝐴 𝑦𝐵− 𝑦𝐴 𝑧𝐵− 𝑧𝐴 � + V (式 2-6) 本文獻中的參數求解採用分段求解旋轉及平移參數,因此先將式 2-6 中的尺度及平 移參數消除,保留旋轉參數後的方程式如式 2-7,其中Rij為旋轉矩陣 R 的元素。 (𝑥𝐵−𝑥𝐴) (𝑧𝐵−𝑧𝐴)
=
𝑅11(𝑥𝐷−𝑥𝐶)+𝑅12(𝑦𝐷−𝑦𝑐)+𝑅13(𝑧𝐷−𝑧𝐶) 𝑅31(𝑥𝐷−𝑥𝐶)+𝑅32(𝑦𝐷−𝑦𝑐)+𝑅33(𝑧𝐷−𝑧𝐶)+ V
(𝑦𝐵−𝑦𝐴) (𝑧𝐵−𝑧𝐴)=
𝑅21(𝑥𝐷−𝑥𝐶)+𝑅22(𝑦𝐷−𝑦𝑐)+𝑅23(𝑧𝐷−𝑧𝐶) 𝑅31(𝑥𝐷−𝑥𝐶)+𝑅32(𝑦𝐷−𝑦𝑐)+𝑅33(𝑧𝐷−𝑧𝐶)+ V
(式 2-7) 一組共軛線段可以產生兩條觀測方程式,最少需要兩組不平行共軛線段才能使用最 小二乘法求出三軸旋轉角共三個未知數。11 求解旋轉矩陣之後,接著將旋轉矩陣 R 與CD兩點坐標兩項為[𝑢𝑖 𝑣𝑖 𝑤𝑖]𝑇結合以便求 解尺度及平移參數,替換式 2-6 後可得如式 2-8。 �𝑥𝑦𝑇𝑇 𝑧𝑇 � + 𝑆 �𝑢𝑣𝐶𝐶 𝑤𝐶 � = �𝑥𝑦𝐴𝐴 𝑧𝐴 � + 𝜆1� 𝑥𝐵− 𝑥𝐴 𝑦𝐵− 𝑦𝐴 𝑧𝐵− 𝑧𝐴 � + V �𝑥𝑦𝑇𝑇 𝑧𝑇 � + 𝑆 �𝑢𝑣𝐶𝐶 𝑤𝐶 � = �𝑥𝑦𝐴𝐴 𝑧𝐴 � + 𝜆2� 𝑥𝐵− 𝑥𝐴 𝑦𝐵− 𝑦𝐴 𝑧𝐵− 𝑧𝐴 � + V (式 2-8) 整理後可得觀測方程式如式 2-9,同樣一組共軛線段可以寫出兩條觀測方程式,而 未知數有平移向量與尺度因子共四個,至少需要兩組共軛線段才能求解剩餘的未知參 數。 (𝑥𝑇+𝑆𝑢𝐶−𝑥𝐴) (𝑧𝑇+𝑆𝑤𝐶−𝑧𝐴)
=
(𝑥𝑇+𝑆𝑢𝐷−𝑥𝐴) (𝑧𝑇+𝑆𝑤𝐷−𝑧𝐴) (𝑥𝑇+𝑆𝑣𝐶−𝑥𝐴) (𝑧𝑇+𝑆𝑤𝐶−𝑧𝐴)=
(𝑥𝑇+𝑆𝑣𝐷−𝑥𝐴) (𝑧𝑇+𝑆𝑤𝐷−𝑧𝐴) (式 2-9)(3) 面特徵數學模型
建立使用面特徵的套合數學模型通常使用坐標轉換與平面方程式,以 Gruen and Akca(2005)提出的平面表示式結合七參數轉換之數學模型為例。 首先建立平面方程式如式 2-10,做為參考的平面方程式為f(x, y, z),需進行坐標轉 換使之與參考平面疊合的平面為g(x, y, z)。 f(x, y, z) = a1𝑥 + 𝑏1𝑦 + 𝑐1𝑧 + 𝑑2 g(x, y, z) = a2𝑥 + 𝑏2𝑦 + 𝑐2𝑧 + 𝑑2 (式 2-10) 接著套用七參數轉換在g(x, y, z)上,式 2-11 中[𝑥𝑇 𝑦𝑇 𝑧𝑇]𝑇為平移向量,S 為尺度因 子,MR為由三軸旋轉角構成的旋轉矩陣。經過坐標轉換的g(x, y, z)與參考平面f(x, y, z)之 誤差量為 V,此式為平面特徵數學模型的觀測方程式,一組共軛平面可以列出一條方程 式,最少需要七組共軛平面才能求解。此觀測方程式需透過最小二乘法求解轉換參數將 誤差最小化後達到點雲套合的目的。 V = f(x, y, z) − S ∗ MR∗ g(x, y, z) − [𝑥𝑇 𝑦𝑇 𝑧𝑇]𝑇 (式 2-11)
12
2-1-4
坐標轉換
由於雷射掃描點雲間之轉換為剛體(rigid body)轉換,常使用七參數轉換做為點雲之 間的坐標轉換模式,分別對點雲資料進行尺度、旋轉及平移使兩組點雲資料疊合。有時 考慮點雲的誤差狀況,會假設兩組資料並沒有尺度的差異,或是將尺度因子固定簡化七 參數為六參數之剛體轉換。2-2 模型導向模式
模型導向模式點雲套合主要是將點雲掃描過程中所有的儀器誤差、定位誤差及雜訊 干擾納入整體平差模型中,並利用控制特徵求解出誤差參數項進而消除點雲掃描時的誤 差,依據 Habib et al. (2009)中提出,誤差參數主要可分為八項,分別為安置平移誤差、 安置角度誤差、雷射測距誤差、雷射角度誤差、GPS 雜訊、IMU 雜訊、雷射測距雜訊及 反射稜鏡角度雜訊。 Crombaghs et al. (2000)進行航帶間高程方向平差,文獻中將整體航帶掃描資料之高 程誤差總結為三個項目,分別為高程平移量、平行航帶方向的傾斜誤差以及垂直航帶方 向的傾斜誤差,以此三項誤差做為未知數,共軛點之高程差為觀測量可建立觀測方程式 如式 2-12,式中 a、b 及 c 分別為三項誤差來源,U 與 V 則為航帶區域坐標系統中與航 帶中心軸平行及垂直的兩個軸向,利用此觀測方程式及連結點資料可消除出航帶誤差, 使點雲資料套合。 ΔH(U, V) = a + bU + cV (式 2-12) Lee et al. (2007)使用共軛線段進行空載光達的航帶間平差,由於點雲資料中線段較 點資料較容易由建物邊界萃取也較可靠,因此該文獻中使用線特徵做為控制特徵。文中 建立平差模式是使用攝影測量的概念,考量平面誤差相較垂直方向誤差來說較為明顯, 因此求解分為兩階段進行,第一階段只考慮平面坐標轉換,求解參數後套用轉換參數再 求出垂直方向改正參數,文獻中參數納入平移、旋轉及尺度的變形影響。 Habib et al. (2008)使用從點雲中的平面特徵相交得到的可靠共軛線段進行航帶平差, 由於點雲可萃取出大量線段,文獻中也使用線段夾角與線段重疊長度自動化匹配共軛線13
段,匹配過的共軛線段套用六參數(三平移及三旋轉)轉換使兩航帶點雲資料套合。
2-3 空載光達與車載光達套合
Von Hansen et al. (2008)提出一粗略套合空載光達與車載光達的方式,此研究中利用
計算點與點之間的斜方差矩陣以及斜方差矩陣的特徵值與特徵向量進行點雲分類,將點 雲區分為線段上的點以及非線段上的點(如圖 2-8),接著保留所有可能屬於線段上的點並 利用這些點與其斜方差矩陣的特徵向量進行線段回歸獲得套合需使用的線形特徵。最後 統計線段的方向並繪製直方圖已進行空載與車載光達線段方向直方圖之間的相關係數 計算,取得最有可能的粗略轉換參數解,此文獻中的旋轉角度與平移量為兩段式求解。 圖 2-8、點雲分類圖(Hansen et al., 2008)
Böhm and Haala (2005)使用 ICP 演算法進行地面光達與空載光達資料的套合,並使
用套合後的光達點雲資料進行虛擬都市建模,文中由於空載光達資料產生的建物缺乏牆
面資訊,因此使用地面光達資料補足其空載光達資料不足之部分。於本文獻中套合後的
房 屋 點 雲 資 料 可 利 用 凹 凸 貼 圖 技 術 (bump mapping) 或 移 位 貼 圖 技 術 (Displacement
14
第三章 研究方法
本研究使用的研究方法為 Least Square 3-D Surface Matching(Gruen and Akca, 2005),
此方法主要是使用最小二乘法求解一組轉換七參數進行萃取後的點雲特徵之間的歐幾 里得距離最小化以達到點雲套合的目標。 點雲資料可以依後續應用不同,而將點雲表示為不同的特徵,常見資料特徵有點特 徵、線特徵及面特徵,本文中主要使用將點雲表示為面特徵的方式進行後續套合作業。 面特徵是一種連續性的空間特徵,例如建物的牆面結構、道路的路面結構或建物的屋頂 面結構,在面結構之平面法向量無顯著變化的範圍內,該面結構可以被視為同一個面, 而當光達對此面結構離散點取樣時,所得到的點群則代表該面特徵,因此,將點群表示 為平面特徵首要議題為如何區分點群是否取樣在同一特徵上。 本文中為了區分取樣在不同面特徵上的點群並兼顧計算效能,首先將資料結構化為 網格狀,並將每一個網格內的所有點資料進行平面擬合,此步驟即將點雲資料的點資訊 轉化為平面資訊,可獲得的輸出資料為平面中心點及平面法向量。在將點資料轉換為平 面特徵資料之後,匹配相似的平面以建立平面特徵之間的共軛關係,並且利用共軛關係 建立觀測方程式。最後使用 LS3D 解算轉換參數,並將參數使用於七參數轉換以獲得轉 換後的點雲資料,以下將分章節進行說明。
3-1 點雲套合流程
本研究所使用點雲套合流程為以下步驟: (1) 輸入光達點雲資料,對車載光達資料進行篩選。 (2) 點雲資料結構化。 (3) 空間網格平面擬合。 (4) 平面特徵匹配。 (5) 建立數學模型。 (6) 求解轉換參數。 (7) 套用轉換參數至目標點雲資料。15
3-2 資料篩選
在進行資料套合之前,須先進行車載光達資料之篩選。因本次實驗中車載光達資料 為道路資料,而道路中央之分隔島將左右車道之路面資料部分遮蔽,使的雙向車道之路 面資料互相重疊部分較少(如圖 3-1),考慮後續進行特徵匹配時條件為特徵足夠接近,因 此須將車載光達資料部分資料濾除,除降低資料量,增加運算效能以外,也能夠找出適 合求解轉換參數之平面特徵位置,增加特徵匹配階段之效率與參數解算正確度。 圖 3-1、左右車道路面重疊狀況示意圖 在求解轉換參數的平差過程中,對整體參數求解精度最具影響力的觀測量為法向量 平行於 XYZ 三軸的三種平面特徵,這三種平面特徵分別表示在真實世界中的牆面及路 面兩種地物結構,因此如何有效保留左右航帶互相重疊且位於牆面及路面的光達點雲資 料即為資料篩選作業的目標。 為了有效保留牆面及路面的光達點資料,本研究中採用將 XY 平面網格化,並且將 三維點雲資料投影至 XY 平面中,計算位於每一個網格內的總點數,因牆面結構的點雲 掃描資料通常在垂直方向上點數較多,因此利用投影至平面後,觀察網格內總點數的分 布,點數較多的網格通常表示牆面結構的位置,即為需要保留的光達點雲資料。 計算網格內總點數後,將累積點數之值域單位化為 0~255,如此一來此網格累積點 數資料即轉換為一影像資料,圖 3-2 為將兩側車道之光達掃描資料各自投影至網格平面 後,統計網格內總點數產生之影像,圖中越亮的部分表示該位置之投影點數越多,也能 夠清楚辨識出牆面結構的位置。16 圖 3-2、左右車道點雲資料點數統計影像 由於在後續的特徵匹配步驟中,點雲資料需要足夠接近並小於門檻值才能做為共軛 平面特徵,且在左右車道中,無互相重疊的區域對解算參數是無助益的,因此產製點數 統計影像之後,後續需要進行左右車道之重疊區域判定。在任一網格之位置上,若只有 一側車道在該網格上統計點數大於零,則認定該網格不屬於左右互有重疊之區域,而保 留下剩餘左右車道統計點數皆大於零的網格作為重疊區影像如圖 3-3,保留網格後給固 定值為 255。
17 圖 3-3、重疊區影像 由於牆面結構投影至 XY 影像平面後,在影像上應呈現為線段特徵,因此使用 Canny Edge Detector 邊界線萃取對左右車道之點數統計影像分別萃取其牆面結構位置。考量對 車載光達套合作業求解轉換參數較有幫助的點為牆面結構及牆面周圍之路面點。為保留 牆面結構周圍的地面點資料,在利用邊界萃取得到建物牆面結構位置後,須將牆面邊界 線影像進行線段膨脹,將此膨脹後的區域視為需保留的重要點雲位置,並將線段特徵影 像轉為面特徵影像,圖 3-4 為將萃取邊界線後膨脹為面特徵影像之過程。
18
圖 3-4、萃取邊界線並膨脹為面特徵影像
19 對重疊區影像取交集,得到左右車道互有重疊且位於牆面周圍的點群位於影像平面中的 位置,依據此保留區域對原始點雲資料篩選,剩餘點群即為對解算參數過程有助益之資 料。圖 3-5 為左右航帶各自計算之點雲保留區域影像。經由此過程,可以減少大量點雲, 僅保留對套合有所助益之具重疊區的平面特徵點雲。 圖 3-5、車載光達點雲左右車道保留區域
3-3 資料結構化
原始點雲資料為點群的集合,不論是進行後續特徵萃取或特徵匹配,使用尚未結構 化的點雲資料將會使計算效率降低,因此在萃取特徵前,必須先將點雲資料結構化為網 格式資料,結構化後網格結構可加入索引值(Index)對網格進行編號,使後續特徵匹配時 搜尋網格內點雲效率增加。 資料結構化之目的為將完整的點雲所佔有的空間分割為小區塊,並擬合空間網格內 的所有點資料為一個建物的平面特徵。空間網格的大小需考量物空間中欲表示出的最小 特徵之尺寸制定,並且需將空間分割時網格內的點的數量納入考量。空間網格之邊長若20 越小,越能夠表示出實際物體的細部特徵,但同時空間網格內的總點數也變少,較容易 受到點的隨機誤差影響,導致平面計算誤差;反之若使用越大尺寸的空間分割,網格內 的總點數增加,較不容易受到雜訊影響平面的計算成果,但也容易忽略掃描物的細微結 構,文內考量到點雲密度以及物件尺寸的影響,不同資料之航帶套合將採用不同空間網 格分割長度。圖 3-6 為同建築物在兩條不同航帶掃描下的點雲資料之網格結構化示意 圖。 圖 3-6、資料結構化示意圖 將點雲資料以網格進行結構化同時必須對網格建立索引值,使網格帶有編號,索引
21
值主要使用三個值表示,如將某一個網格標示為(u, v, w)則表示此網格為 X 軸上第 u、Y
軸上第 v 及 Z 軸上第 w 個網格,對網格進行編號後,在後續進行法向量匹配時可以利
用此索引值限制法向量搜尋範圍,並增加匹配效率及正確性,建立網格編號知詳細步驟
如下:
(1) 計算點資料的三軸坐標最小值xmin、ymin及zmin,並假設網格邊長為 d。
(2) 依式 3-1 計算點 i 於(xi, yi, zi)三軸上的網格索引值,x、y 及 z 之索引值分別為 u、v 及 w。 u = �xi−𝑥𝑚𝑚𝑚 𝑑 � v = �yi−𝑦𝑚𝑚𝑚 𝑑 � (式 3-1) w = �zi−𝑧𝑚𝑚𝑚 𝑑 �
3-4 特徵資料表示
在經過資料切割步驟後,祇要是在同一個三維網格內的點,都會有相同的(u, v, w), 若三維網格內的點數超過門檻值,這些點則納入面特徵計算,反之,數量太少的網格在 擬合時可靠度較低,因此不納入計算。得到網格分割後的點雲資料可進一步計算平面特 徵,在本研究中使用計算平面特徵的方法為 Pauly et al. (2002)所提出之主成分分析法(Principal Component Analysis, PCA),此方法首先利用網格內點群至中心點之方向向量
計算點群之相關係數矩陣,並分解相關係數矩陣求得特徵值作為點群分布狀況的指標, 詳細說明如下。 令一點群 Pi(xi, yi, zi) 之總點數為 i,此點群之坐標展開為矩陣形式如式 3-2。 P = � 𝑥1 𝑦1 𝑧1 𝑥2 𝑦2 𝑧2 ⋮ ⋮ ⋮ 𝑥𝑖 𝑦𝑖 𝑧𝑖 � (式 3-2) 計算該 P 點群之中心點坐標為 (𝑥̅, 𝑦�, 𝑧̅),並將式之點資料矩陣減去點群中心點坐標 進行坐標平移,並將平移後的點坐標矩陣與其轉置相乘,得到相關係數矩陣如式 3-3。
22 Mc = � 𝑥1− 𝑥̅ 𝑥2− 𝑥̅ … 𝑥𝑖− 𝑥̅ 𝑦1− 𝑦� 𝑦2− 𝑦� … 𝑦𝑖− 𝑦� 𝑧1− 𝑧̅ 𝑧2− 𝑧̅ … 𝑧𝑖− 𝑧̅ � × � 𝑥1− 𝑥̅ 𝑦1− 𝑦� 𝑧1− 𝑧̅ 𝑥2− 𝑥̅ 𝑦2 − 𝑦� 𝑧2− 𝑧̅ ⋮ ⋮ ⋮ 𝑥𝑖 − 𝑥̅ 𝑦𝑖− 𝑦� 𝑧𝑖− 𝑧̅ � (式 3-3) 此相關係數矩陣Mc之特徵向量表示點群的三軸分布向量,特徵值為三軸分布的範圍, 將三個特徵值依大小排列得到λ1 > λ2 > λ3,由於特徵值表示點群的三軸分布範圍,最 小的特徵值表示點群在該特徵值所對應的特徵向量方向上的分布範圍最小。若最小的特 徵值經過式 3-4 單位化後小於某一個門檻值(本研究中門檻值設定為 0.2),即視此點群為 往其他兩個特徵向量方向上延展的平面結構(陳俊元, 2008),而最小的特徵值所對應的特 徵向量即為此擬合平面之平面法向量。 λk =𝜆1+𝜆𝜆32+𝜆3 (式 3-4) 而擬合平面的平面中心點則利用該點群的平均中心計算,為了防止粗差影響平面中 心點位置,計算過程採疊代計算,過程中反覆計算點群的坐標平均值及標準差,並移除 坐標差大於三倍標準差的點,重複計算至三軸坐標標準差小於門檻值為止,此時的點群 平均中心為較可靠的位置。 經過計算平面法向量與平面中心點,已經可以將點雲資料轉換為平面特徵資料以進 行後續特徵匹配步驟,圖 3-7 表示從點雲資料經過切割,計算得到擬合平面的階段性成 果示意圖。
23 圖 3-7、點雲資料轉換為平面特徵示意圖
3-5 共軛特徵搜尋
LS3D 之目的為最小化空間中共軛平面,因此搜尋共軛平面是套合的重要工作之一。 轉換點雲資料至平面特徵後,資料內含有大量平面特徵,必須進行平面特徵匹配,留下 對求解參數轉換有幫助的特徵並建立觀測方程式,本研究中使用的篩選條件為距離及角 度門檻,由於網格已編碼,可加速搜尋,即目標點雲資料中任一網格中的平面特徵,將 與鄰近參考資料中網格編號鄰近的特徵平面進行比較,平面法向量小於門檻值的最接近 平面將被選為共軛平面特徵,而建立共軛平面特徵的步驟中,考量到兩組資料的總法向 量數及掃瞄遮蔽可能不同,建立共軛關係的方式為多目標平面特徵對一參考平面特徵, 距離及角度搜尋門檻將受參考點雲資料以及目標點雲資料的初始定位誤差調整,圖 3-8 表示搜尋共軛平面的門檻定義。24 圖 3-8、搜尋共軛門檻示意圖 本研究中由於空載光達資料航帶間誤差較小,而車載光達之兩車道掃描資料受掃描 區域鄰近建物影響,導致直接地理定位系統誤差較大,兩組資料之特徵匹配搜尋範圍將 由原始誤差計算而得,才能找到較正確且較大量的共軛平面特徵。圖 3-9 展示對於同一 建物,空載光達之兩航帶資料匹配共軛特徵之示意圖,圖 3-9 上兩圖為由兩不同航帶光 達對同一建物之掃描點雲資料萃取平面特徵成果,圖 3-9 下圖為匹配成功後保留之平面 特徵成果,其中綠色及藍色箭頭分別表示上圖左及上圖右之匹配成功平面特徵。
25
26
3-6 建立數學模型
本研究使用 LS3D(Gruen and Akca, 2005)解算轉換參數,此方法假設空間中有需要
套合的兩個平面,此兩平面為使用不同儀器或不同方法對同一物體之掃描點雲資料所表 示。兩平面中可選定其中一平面為固定的參考平面f(x, y, z),另一平面則為需要進行坐 標轉換的目標平面g(x, y, z),在理想條件之下,此兩平面應當沒有誤差,可以用式 3-5 表示。 f(x, y, z) = g(x, y, z) (式 3-5) 但在現實狀況中,可能因為任何環境條件或隨機誤差導致兩平面不相同,此時可以 假設差異量為e(x, y, z),並且加入式 3-5 可寫為式 3-6。 f(x, y, z) − e(x, y, z) = g(x, y, z) (式 3-6) 式 3-6 即為此最小二乘曲面匹配法的觀測方程式,為了最小化誤差量並達到使兩平 面之歐幾里得距離最小的目標,將一七參數轉換(如式 3-7)套用在g(x, y, z)平面上。套用 參數轉換後的觀測方程式為非線性,只能以求解未知數增量並採疊代計算改正初始值至 未知數增量收斂的方式求解未知數。為了求解未知數增量,必須先使用泰勒展開式將 g(x, y, z)對未知數微分得到如線性化後的觀測方程式如式 3-8,式中g0(𝑥, 𝑦, 𝑧)表示 g(x, y, z)的初始近似位置。 x = tx+ 𝑚(𝑟11𝑥0+ 𝑟12𝑦0+ 𝑟13𝑧0) y = ty+ 𝑚(𝑟21𝑥0+ 𝑟22𝑦0+ 𝑟23𝑧0) z = tz+ 𝑚(𝑟31𝑥0+ 𝑟32𝑦0+ 𝑟33𝑧0) (式 3-7) f(x, y, z) − e(x, y, z) = g0(𝑥, 𝑦, 𝑧) +𝜕𝑔0(𝑥,𝑦,𝑧)𝜕𝑥 𝑑𝑥 +𝜕𝑔0𝜕𝑦(𝑥,𝑦,𝑧)𝑑𝑦 +𝜕𝑔0(𝑥,𝑦,𝑧)𝜕𝑧 𝑑𝑧 (式 3-8) 七參數轉換(式 3-7)中,(x0, 𝑦0, 𝑧0)為原始目標平面上的點位坐標,需要透過坐標轉 換移動至(x, y, z)與參考平面疊合,符號rij表示旋轉矩陣R(ω, ϕ. κ),tx、𝑡𝑦與𝑡𝑧分別表示 沿著 xyz 三軸的平移量,而 m 表示尺度因子,本研究假設兩組平面間無尺度誤差,坐標 轉換模式為剛體(rigid body)轉換,因此將尺度因子接近 1。 延續式 3-8,由於觀測方程式的未知數為坐標轉換的七個參數,可以利用式 3-7 將dx、
27 dy及dz轉換為七個參數(如式 3-9),式中pi為七個未知數的集合(tx, 𝑡𝑦, tz, 𝑚, 𝜔, 𝜙, 𝜅),aij為 式 3-7 對七未知數微分後的係數。 dx =𝜕𝑝∂x 𝑚𝑑𝑝𝑖 = dtx+ 𝑎10𝑑𝑚 + 𝑎11𝑑𝜔 + 𝑎12𝑑𝜙 + 𝑎13𝑑𝜅 dy =𝜕𝑝∂y 𝑚𝑑𝑝𝑖 = dty+ 𝑎20𝑑𝑚 + 𝑎21𝑑𝜔 + 𝑎22𝑑𝜙 + 𝑎23𝑑𝜅 dz =𝜕𝑝∂z 𝑚𝑑𝑝𝑖 = dtz+ 𝑎30𝑑𝑚 + 𝑎31𝑑𝜔 + 𝑎32𝑑𝜙 + 𝑎33𝑑𝜅 (式 3-9) 式 3-8 中dx、dy 及 dz的係數可以看成對平面g0(x, y, z)對x、y 及 z之導數,並且可 以簡寫為式 3-10。 gx =𝜕𝑔0(𝑥,𝑦,𝑧)𝜕𝑥 ,gy = 𝜕𝑔0(𝑥,𝑦,𝑧)𝜕𝑦 ,gz =𝜕𝑔0(𝑥,𝑦,𝑧)𝜕𝑧 (式 3-10) 若繼續將式 3-8 之�𝜕𝑔0(𝑥,𝑦,𝑧) 𝜕𝑥 , 𝜕𝑔0(𝑥,𝑦,𝑧) 𝜕𝑦 , 𝜕𝑔0(𝑥,𝑦,𝑧) 𝜕𝑧 �使用式 3-10 之(gx, gy, gz)替換,並且 用式 3-9 中推導(x, y, z)對未知數偏微分成果帶入,則可以得到最後觀測方程式如式3-11。 −e(x, y, z) = gx𝑑𝑡𝑥+ 𝑔𝑦𝑑𝑡𝑦+ 𝑔𝑧𝑑𝑡𝑧+ �𝑔𝑥𝑎10+ 𝑔𝑦𝑎20+ 𝑔𝑧𝑎30�𝑑𝑚 + �𝑔𝑥𝑎11+ 𝑔𝑦𝑎21+ 𝑔𝑧𝑎31�𝑑𝜔 + �𝑔𝑥𝑎12+ 𝑔𝑦𝑎22+ 𝑔𝑧𝑎32�𝑑𝜙 + �𝑔𝑥𝑎13+ 𝑔𝑦𝑎23+ 𝑔𝑧𝑎33�𝑑𝜅 − 𝑓(𝑥, 𝑦, 𝑧) + 𝑔0(𝑥, 𝑦, 𝑧) (式 3-11) 式 3-11 即為最小二乘平差法中的觀測方程式,可以建立設計矩陣 A,未知數矩陣 x 及觀測量矩陣 l(如式 3-12)。 A = [gx, gy, gz, �𝑔𝑥𝑎10+ 𝑔𝑦𝑎20+ 𝑔𝑧𝑎30�, �𝑔𝑥𝑎11+ 𝑔𝑦𝑎21+ 𝑔𝑧𝑎31�, �𝑔𝑥𝑎12+ 𝑔𝑦𝑎22+ 𝑔𝑧𝑎32�, �𝑔𝑥𝑎13+ 𝑔𝑦𝑎23+ 𝑔𝑧𝑎33�] xT = [dt x, dty, dtz, m, dω, dϕ, dκ] l = f(x, y, z) − g0(𝑥, 𝑦, 𝑧) (式 3-12) 除使用式 3-12 中各矩陣外,也加入自行設計之權矩陣 P,本研究中將由共軛平面特 徵產生之觀測方程式設定彼此等權,因此給予共軛特徵觀測方程式之權矩陣為主對角線 上皆為 1,其餘元素皆為 0 之單位矩陣。根據最小二乘平差法,可依式 3-13 求解未知數 增量 𝑥�,並將增量與初始值x0相加即可得到第一次未知數逼近值x� ,將x1 � 代回式 3-12 重1 新建立設計矩陣 A 以及觀測量矩陣 l 並重複解算未知數增量直到增量小於某一門檻值,
28 此時的未知數x�即為未知數收斂解。 n 𝑥� = (𝐴𝑇𝑃𝐴)−1𝐴𝑇𝑃𝑃 (式 3-13) 除使用共軛平面建立設計矩陣、未知數矩陣及觀測量矩陣外,也可加入虛擬觀測方 程共同求解。虛擬觀測方程式為使未知數做為觀測量共同求解的作法,因此與共軛平面 所建立的觀測方程式相同,也可以加入權矩陣Pb運算,透過於未知參數間設定權比例分 配誤差,例如將尺度因子之權設定為無限大,此時分配至尺度因子的誤差比例將接近無 限小,可視為尺度因子固定為已知量。除此之外,若光達儀器本身測量精度已知,可依 其精度分配平移參數及轉換參數不同的權比例,以求得更精確的轉換參數。將未知數做 為虛擬觀測方程式加入平差模型的方式如式 3-14。 −e = Ax − l, P −eb= 𝐼𝑥 − 𝑃𝑏, Pb (式 3-14) 加入虛擬觀測方程式後,可以再將式 3-13 擴充為加入虛擬觀測方程式之觀測方程 式並求解未知數增量,如式 3-15。 𝑥� = (𝐴𝑇𝑃𝐴 + 𝑃 𝑏)−1(𝐴𝑇𝑃𝑃 + 𝑃𝑏𝑃𝑏) (式 3-15) 未知參數增量收斂後,解得未知數x�可依據最小二乘法原理求得觀測量殘差向量 v,n 而殘差也可用於估計單位權中誤差σ�及觀測量的解算精度σ0 � ,式 3-16 中將列出這些評pı 估解算成果的指標公式,這些精度評估指標為最小二乘法數學模型之內部精度評估指 標。 v = Ax� − 𝑃 σ0 � = �𝑉𝑛−𝑢𝑇𝑃𝑉� 1 2 σ� = 𝜎pı �(𝐴0 𝑇𝑃𝐴)−1 (式 3-16)
29
3-7 坐標轉換
經過以上最小二乘法求解未知轉換參數後,可以在目標平面上套用一組七參數轉換 如式 3-17 使目標平面轉換至參考平面之坐標系統上,並且能夠進行後續的外部精度驗 證。式 3-17 中 m 為尺度因子,MR為由三軸旋轉角構成之旋轉矩陣,�𝑡𝑥 𝑡𝑦 𝑡𝑧�𝑇為平移向 量。 �𝑦𝑥 𝑧� = m ∗ MR∗ � 𝑥0 𝑦0 𝑧0 � + �𝑡𝑡𝑦𝑥 𝑡𝑧 � MR = � 𝑐𝑐𝑐φcosκ −𝑐𝑐𝑐𝑐𝑐𝑐𝑐𝜅 𝑐𝑐𝑐𝑐 𝑐𝑐𝑐𝜔𝑐𝑐𝑐𝜅 + 𝑐𝑐𝑐𝜔𝑐𝑐𝑐𝑐𝑐𝑐𝑐𝜅 𝑐𝑐𝑐𝜔𝑐𝑐𝑐𝜅 − 𝑐𝑐𝑐𝜔𝑐𝑐𝑐𝑐𝑐𝑐𝑐𝜅 −𝑐𝑐𝑐𝜔𝑐𝑐𝑐𝑐 𝑐𝑐𝑐𝜔𝑐𝑐𝑐𝜅 − 𝑐𝑐𝑐𝜔𝑐𝑐𝑐𝑐𝑐𝑐𝑐𝜅 𝑐𝑐𝑐𝜔𝑐𝑐𝑐𝜅 + 𝑐𝑐𝑐𝜔𝑐𝑐𝑐𝑐𝑐𝑐𝑐𝜅 𝑐𝑐𝑐𝜔𝑐𝑐𝑐𝑐 � (式 3-17)30
第四章 實驗資料
4-1 設計模擬資料
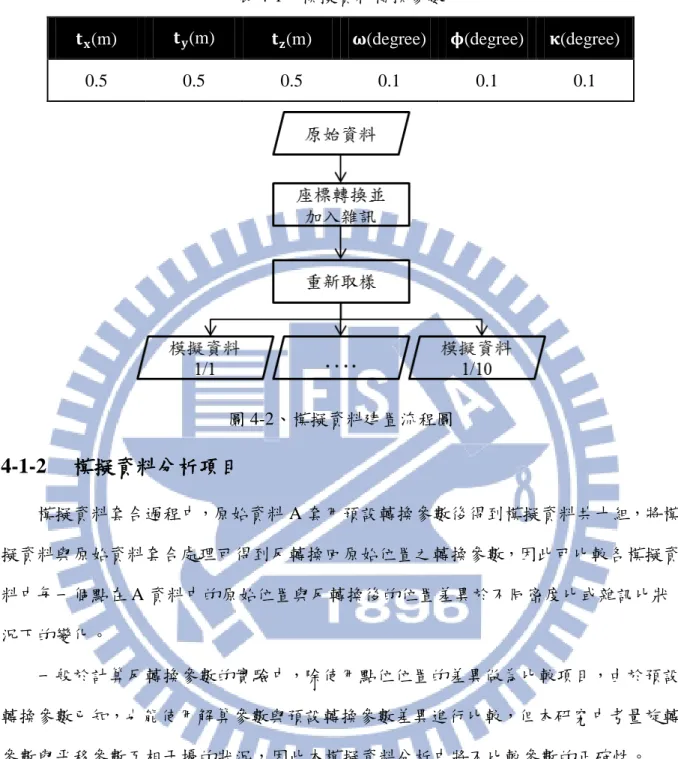
在使用真實光達點雲資料前,先使用一組利用已知七參數轉換過的模擬資料進行實 驗分析,由於本模擬資料原始點位位置已知,能通過比較 LS3D 求解轉換參數後將資料 反轉換回原始位置的坐標差異,以下分別介紹資料來源及分析項目。4-1-1
模擬資料來源
原始資料 A 來源為點間距 5cm 之空載光達點雲之部分資料(如圖 4-1 中框選區域), 透過預先設定之轉換參數(如表 4-1)並加入隨機誤差之後進行轉換,為驗證不同點雲密度 的資料之套合狀況,將坐標轉換且加入雜訊後的原始資料 A 進行重新取樣,雜訊量級為 15cm、10cm 及 5cm 三種,而重新取樣間距為 1、3、5、7 及 10,最後得到原始資料 A、 及 15 組模擬資料。圖 4-2 中展示模擬資料建置流程圖。 圖 4-1、模擬資料來源31
表 4-1、模擬資料轉換參數
𝐭𝐱(m) 𝐭𝐲(m) 𝐭𝐳(m) 𝛚(degree) 𝛟(degree) 𝛋(degree)
0.5 0.5 0.5 0.1 0.1 0.1 圖 4-2、模擬資料建置流程圖
4-1-2
模擬資料分析項目
模擬資料套合過程中,原始資料 A 套用預設轉換參數後得到模擬資料共十組,將模 擬資料與原始資料套合處理可得到反轉換回原始位置之轉換參數,因此可比較各模擬資 料中每一個點在 A 資料中的原始位置與反轉換後的位置差異於不同密度比或雜訊比狀 況下的變化。 一般於計算反轉換參數的實驗中,除使用點位位置的差異做為比較項目,由於預設 轉換參數已知,也能使用解算參數與預設轉換參數差異進行比較,但本研究中考量旋轉 參數與平移參數互相干擾的狀況,因此本模擬資料分析中將不比較參數的正確性。4-2 設計真實資料
使用模擬資料驗證演算法,並分析參數與套合成果的關係後,使用真實光達資料進 行套合,真實光達點雲資料包含空載光達資料以及車載光達資料。 由於空載資料是使用多航帶掃描資料的組合。使用資料前,先在多航帶資料間概略 選取數個共軛點並觀察其航帶間概略誤差,因點雲密度為每平方公尺為 4 點,誤差量於32 橫方向約 50 公分,縱方向約 20 公分。由於已經過完整航帶之整體套合,其高程方向則 是約 5 公分。在進行與車載資料套合之前必須進行航帶間套合校正,使航帶與航帶之間 的地物表面資訊一致。 至於車載資料則是分為左側車道與右側車道之原始掃描資料且尚未經過資料處理, 與空載資料相同因地理定位系統精度使的雙向車道之地面資訊不一致,而相較於空載光 達資料來說,使用車輛做為光達載具在都市區內掃描除原有的定位系統精度誤差以外, 也會受到周邊高度較高之建物影響,而另外產生多路徑效應以及遮蔽導致的定位誤差, 因此雙向車道的光達點雲資料不一致的狀況較空載光達點雲資料嚴重許多。利用人工點 選路面號誌角點進行初步誤差估計,誤差量在平面方向約 30 至 50 公分,高程方向約 2 至 3 公尺,因此使用車載資料與空載資料套合前必須進行雙向車道之車道間套合。 完成以上空載資料與車載資料之前處理後,接著進行空載對車載光達資料的套合, 本研究以空載資料為基礎,將車載資料套合到空載資料中,下列出兩種光達資料的資料 來源以及實驗之分析項目。
4-2-1
真實資料來源
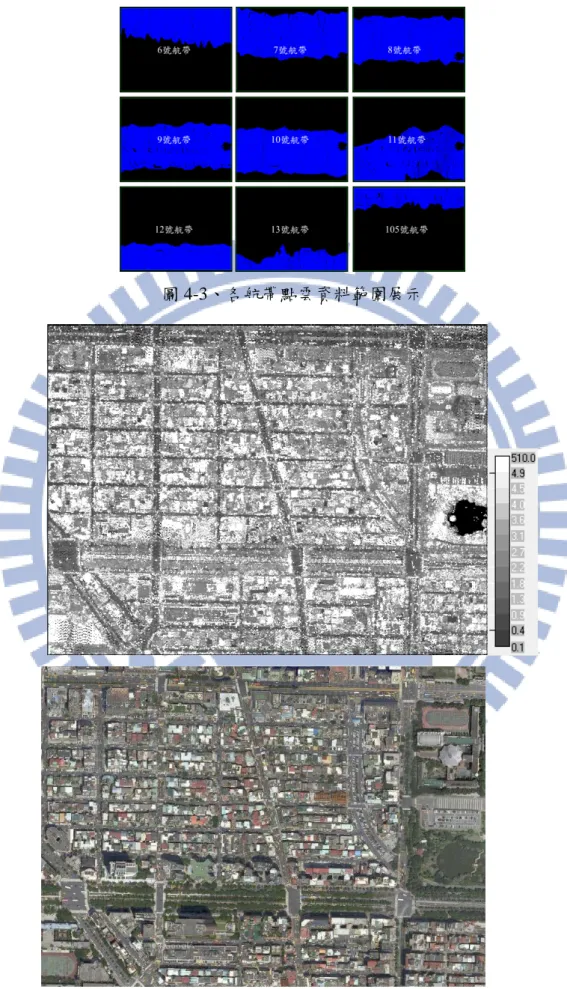
空載光達由 Optech ALTM 30/70 於 2010 年掃描,點雲平均密度為4pt/m2,資料內 含有 9 條航帶的掃描資料,航帶編號分別為 6、7、8、9、10、11、12、13 及 105,各航 帶資料之資料範圍如圖 4-3 所示,綠色外框表示完整資料範圍,藍色點雲表示該航帶資 料於完整資料範圍內之位置,範圍為台北市約 800m*600m,原始資料之坐標系統為 TWD97,圖 4-4 展示空載光達點雲資料(圖 4-4 上)及同資料範圍之空照影像(圖 4-4 下)。33
圖 4-3、各航帶點雲資料範圍展示
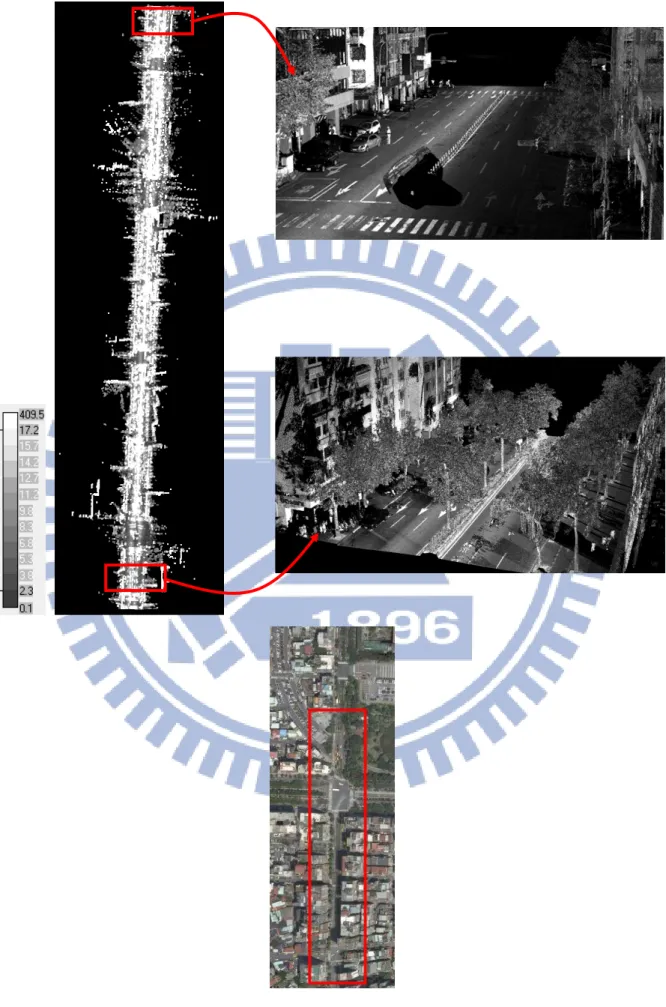
34 車載資料則是由 Optech Lynx 於 2011 年 7 月 10 日掃描,平均點雲掃描間距為 5cm, 原始資料之坐標系統為 UTM。載具掃描路線為光復南路長度約 900m 之路段。載具掃描 計畫制定為載具從光復南路左側車道北端進入,一路向南掃描至最南端後迴轉,接著從 右側車道之最南端往北行進並完成掃描(如圖 4-5)。 圖 4-5、車載光達掃描路徑 因以上掃描計畫制定,本實驗中將整組資料分為左側車道及右側車道兩個車道資料, 而在初始資料品質方面,左右側車道之誤差較大,由於高程方向較為明顯(約兩公尺)。 考慮與空載光達資料之重疊區,於空載光達對車載光達資料套合實驗中僅使用約 575m 之路段部分資料,圖 4-6 為實驗中使用的車載光達掃描資料、光達資料之局部放大圖(圖 4-6 上)以及光復南路空照影像(圖 4-6 下),空照影像中紅框即為使用資料之範圍。
35
36
4-2-2
真實資料分析項目
由於真實光達點雲資料在掃描過程中使用不同儀器、不同載具且不同掃描距離,點 雲資料在密度以及掃描地物上都有極大差異,因此除部分共同檢核項目之外,兩種點雲 資料也加入不同項目進行分析,以下分別描述各種資料套合之檢核項目。4-2-2-1 共同檢核項目
(1) 共軛面距離統計 由於本文使用的點雲套合模式須匹配平面特徵做為平差計算時的觀測量,匹配後的 平面特徵可以計算其平面間的最短距離,且此距離參數在套合前後理應被最小二乘法降 至最小,因此比較套合前後共軛面的距離參數之殘差 v 以及距離參數之標準差能夠做為 此次套合結果的優劣指標。 (2) 視覺比較套合差異 此分析項目主要使用 Microstation 及 Terrascan 軟體展示套合前後點雲資料剖面之疊 合狀況。空載資料主要展示均勻分布於資料範圍內多航帶點雲資料之山形屋疊合狀況, 藉此可分析其屋頂平面之平面方向與高程方向之誤差,而車載資料分析主要為兩車道點 雲資料之路面以及牆面套合情形,利用牆面之平面方向差異以及路面之高程方向差異可 了解套合前後點雲之誤差改進。4-2-2-2 空載光達航帶間套合檢核項目
空載光達資料的特性有較低密度及範圍之特性,而其資料內主要地物為房屋屋頂以 及道路平面,因其點雲密度較低,無法使用檢核點做為檢核項目,因此空載光達資料除 使用以上共同檢核項目以外,另外加入檢核平面之檢核項目。 進行套合工作之前,事先人工手動圈資料範圍內之平坦區域(例如平坦且無車輛之 路面、平坦屋頂或山形屋頂)做為檢核平面,考慮點雲密度較為稀疏,檢核平面範圍須 大於4m2以確保檢核平面區域內有足夠點數進行平面擬合。框選檢核平面區域後將框選 範圍之內的點資料進行平面擬合得到該檢核平面之參數,比較檢核平面擬和參數於套合 前後之高程參數差異,圖 4-7 為空載光達點雲之檢核平面框選示意圖。37 圖 4-7、檢核平面框選
4-2-2-3 車載光達車帶間套合檢核項目
車載光達點雲資料與空載光達點雲資料之特性相反,車載資料之密度雖高但範圍也 較小,資料內主要掃描地物為路面以及建物之牆面結構,因此須採用與空載光達點雲資 料不同的檢核策略。考慮其點雲密度與掃描距離相關,離掃描器 10 公尺(約為三條車道 之寬度)以內之點雲間距為 1pt/5cm,因此可以在道路面上精確量測路面標誌(如斑馬線、 雙黃線)之角點做為檢核點,除路面標誌之外,部分路段由於分隔島遮蔽,若遮蔽情形 嚴重導致光達無掃描對向車道資料,則改採用可明辨之建物牆面角點做為檢核點,並統 計檢核點於套合前後之坐標差異做為量化統計指標,圖 4-8 為點選檢核點於車載光達點 雲資料中之示意圖。38 圖 4-8、檢核點(紅色X)點選示意圖
4-2-2-4 車載光達對空載光達套合檢核項目
進行車載光達對空載光達資料套合時,考慮到檢核點無法應用於空載光達資料,因 此仍使用對空載光達之檢核平面做為此項目之獨立驗證項目。此項目之檢核平面與空載 光達之獨立驗證項目不同,由於空載光達與車載光達之重疊區主要在於光復南路後半段, 因此檢核平面需均勻分布於兩組資料之光復南路重疊區部分。39
第五章 實驗成果
5-1 模擬資料套合成果
模擬資料實驗中,重新取樣並且加入雜訊的模擬資料將個別與原始資料進行套合, 求解轉換參數後將模擬資料反轉換回原始位置,並比較點雲資料中每一個點之反轉換位 置與原始位置的差異,圖 5-1 中將繪出反轉換位置與原始位置之三軸分量差以及距離差, 橫軸表示重新取樣間距,縱軸表示點位坐標差值,單位為公尺,藍色線段為雜訊量級 15cm,綠色線段雜訊量級為 10cm,紅色線段雜訊量級為 5cm。 圖 5-1、模擬資料坐標檢核 由圖 5-1 中可以觀察到距離差隨密度增加降低的趨勢,表示密度增加有助於套合精 度提升,而若希望點位三軸分量精度達到 15cm,進行套合之兩組點雲密度比需大於 1/7。40 另由於平差過程中擬合平面部分使用平均位置進行平面擬合,使雜訊於平均後消除,而 對轉換參數品質影響較小。 除使用最小二乘平面匹配法進行模擬資料點雲套合之外,也利用 ICP 演算法進行點 雲套合比較,比較使用資料分別為雜訊量級 0cm 及 15cm,重新取樣密度為原始密度及 1/10 總共四種模擬資料,成果如表 5-1 所示。 表 5-1、LS3D 及 ICP 比較 演算法 密度 雜訊量 dx(m) dy(m) dz(m) (𝐝𝐱𝟐+ 𝒅𝒚𝟐+ 𝒅𝒛𝟐)𝟏𝟐(m) 計算時間(s) LS3D 1 1 0cm 0.001 -0.001 0.001 0.002 33.5 15cm -0.002 -0.043 0.020 0.048 41.3 1 10 0cm 0.016 -0.017 0.018 0.030 35.5 15cm -0.023 -0.043 0.003 0.049 15.0 ICP 1 1 0cm 0 0 0 0 421.1 15cm -0.008 0.001 -0.005 0.009 3207.2 1 10 0cm 0 0 0 0 83.7 15cm -0.009 0 -0.004 0.010 272.7 觀察上表套合精度,可得知兩種演算法皆能達到五公分的點雲套合精度,其中以 ICP 點雲套合精度較佳,但由於 ICP 使用原始尚未結構化之點雲資料進行點雲套合作業,在 套合作業效率上較差,且效率會隨著點雲資料量以及隨機誤差降低,反之 LS3D 因先將 點雲結構化為平面特徵,點資料量以及點位隨機誤差影響平面擬合成果,對套合作業之 效率影響較低。
5-2 真實資料套合成果
5-2-1
空載光達航帶間套合成果
由於空載光達掃描資料共含有九組航帶資料,因此選定掃描位置位於中央且與其他41 八組資料皆有重疊的第八號及第九號航帶掃描資料做為參考點雲資料,先將此兩航帶掃 描資料進行一次套合並組合為一組點雲資料,並將其他七組航帶資料轉換至由第八號及 九號航帶所組成的參考資料上,圖 5-2 展示兩參考航帶掃描資料位於整組掃描資料中的 位置,圖中橘色點雲資料為第八號航帶、綠色點雲資料為第九號航帶,白色點雲為完整 資料範圍。 圖 5-2、空載光達參考資料選定 求解轉換參數使用 LS3D 進行,該演算法將自動匹配相似的平面特徵做為解算轉換 參數時的觀測量,而此兩航帶套合中匹配成功特徵之平面間垂距的變化量將列於表 5-2 做為內部精度驗證指標,並在表 5-3 中列出將第九號航帶套合至第八號航帶之求解轉換 參數。
42 表 5-2、參考資料匹配平面特徵距離統計 最大值(m) 最小值(m) 平均值(m) 標準差(m) 套合前 1.184 0.000 -0.063 0.121 套合後 0.353 0.000 0.000 0.062 表 5-3、九號航帶至八號航帶轉換參數 𝐭𝐱(𝒎) 𝐭𝐲(𝐦) 𝐭𝐳(𝐦) 𝛚(𝐝𝐝𝐝𝐝𝐝𝐝) 𝛟(𝐝𝐝𝐝𝐝𝐝𝐝) 𝛋(𝐝𝐝𝐝𝐝𝐝𝐝) -1.073 0.224 0.064 0.014 -0.006 0.006 由於空載光達航帶間套合需使用兩航帶套合後資料做為參考資料,因此參考資料的 套合也需要進行檢核平面之外部精度驗證以確保參考資料的品質,圖 5-3 表示用於此兩 資料套合時的檢核平面分布狀況,圖中橘色點雲資料為第八號航帶、綠色點雲資料為第 九號航帶,黃色區塊即為檢核平面分布位置。 圖 5-3、檢核平面分布 檢核平面比較項目為在兩航帶重疊區間共 44 個檢核平面之點雲擬和參數,表 5-4 中列出檢核平面之高程參數差值之統計量。