國 立 交 通 大 學
電控工程研究所
碩士論文
運用 H
∞控制法則降低車輛行經
顛簸路面時之震動與耗能
Reduction of Vehicle Vibration and Energy Consumption on
Rugged Roads by H
∞Control Laws
研 究 生:王志偉
指導教授:蕭得聖 博士
運用 H
∞控制法則降低車輛行經
顛簸路面時之震動與耗能
Reduction of Vehicle Vibration and Energy Consumption on
Rugged Roads by H
∞Control Laws
研 究 生:王志偉 Student:Zhi-Wei Wang
指導教授:蕭得聖 Advisor:Te-Sheng Hsiao
國立交通大學
電控工程研究所
碩士論文
A ThesisSubmitted to Institute of Electrical Control Engineering College of Electrical and Computer Engineering
National Chiao Tung University in partial Fulfillment of the Requirements
for the Degree of Master
in
Electrical Control Engineering September 2012
Hsinchu, Taiwan, Republic of China 中華民國一百零一年九月
運用 H
∞控制法則降低車輛行經顛簸路面時之震動與耗能
學生:王志偉
指導教授:蕭得聖博士
國立交通大學電控工程研究所
摘要
近年來由於氣候異常,使得環保意識抬頭。因此環保駕駛(Eco-driving)的觀念也逐 漸成形。環保駕駛的概念在國外已推廣有年,環保駕駛提倡不猛踩油門或煞車、有目的 的變換車道等等。就大部分駕駛者而言,在通過顛簸路面之前會將車速降低以減少駕駛 者所感受到的震動,但沒有經驗或是沒有環保駕駛概念的駕駛者,往往過度剎車以致無 法兼顧舒適度與耗能,甚至駕駛者太晚發現前方有顛簸路段而錯失反應時機,造成通過 顛簸路面時的不適感。但不管是急速煞車導致耗能過度或是沒有適當的反應而使震動過 大皆不是駕駛者想要的結果。 本研究針對後輪驅動車輛,設計輪胎轉矩控制系統,使車輛在行經顛簸路面時,能降 低震動,同時避免過度剎車。本論文將控制架構分為上下層控制器,上層控制器採用 H Control 的方式,配合人體對加速度在頻域上的權重,調整 H之頻域權重計算所需要的 縱向加速度以盡量少的耗能降低路面顛簸傳至車身的震動。下層控制器則考慮線性輪胎 模型與真實輪胎模型間受外界干擾產生的模型不確定性的問題,藉由控制輪胎力矩來產 生所需的縱向加速度。最後本研究將以 Carsim 模擬軟體來驗證車輛行經顛簸路面能透 過控制輪胎力矩來降低駕駛者感受到的震動與節能效果。Reduction of Vehicle Vibration and Energy Consumption on Rugged
Roads by H
∞Control Laws
Student:Zhi-Wei Wang
Advisor:Dr. Te-Sheng Hsiao
Institute of Electrical Control Engineering
National Chiao Tung University
Abstract
In recent years, climate anomalies inspire the rise of environmental awareness. Therefore, eco-driving has been promoted for years. Eco-driving suggests that drivers should avoid inefficient deceleration or acceleration. But it is hard for an inexperienced driver to take into consideration both eco-driving and driver comfort at the same time. Hence this paper presents a wheel torque control structure for a vehicle on rugged roads to achieve eco-driving and driver comfort simultaneously.
The proposed control structure is separated into the upper controller, input linearization and the lower controller. The input linearization allows a linear time invariant upper controller to be used. The upper controller calculates the desired longitudinal acceleration by H control
techniques, because H controllers are effective in suppressing model uncertainties and enhancing driver comfort in accordance with the ISO standard. The lower controller is used to calculate the wheel torque for tracking the longitudinal acceleration given by the upper
controller. To compensate for the model uncertainty between the Carsim tire model and the liner tire model in use, the sliding mode controller is applied to the lower controller. Then, comparisons of the proposed control structure and normal driver reaction on rugged roads are conducted by Carsim.
誌謝
首先誠摯的感謝指導教授蕭得聖博士,老師悉心的教導讓我能夠順利完成碩士論文的 研究。老師在研究上的嚴謹態度實為我輩楷模,在研究過程中讓我能更清楚的知道如何 發現問題、解決問題。 本論文的完成亦得感謝我的口試委員徐保羅教授與陳永平教授,對本論文提出寶貴的 建議及指正,使本論文更趨完善。 兩年的時間裡,感謝我的女朋友佩璇總是不遺餘力的支持我。還有實驗室的學長永洲、 翊熏、兆平不吝於給予研究上的建議;最後也感謝實驗室的同學和學弟們,在有空閒的 時候能一起打球。 最後我要感謝永遠支持我的家人,沒有他們的支持與鼓勵我也沒有辦法順利的完成論 文,所以在此我要將此論文獻給我的家人。目錄
圖目錄 ... v 第一章、緒論 ... 1 1.1 研究背景與動機 ... 1 1.2 研究目的 ... 1 1.3 研究貢獻 ... 2 1.4 論文架構 ... 2 第二章、相關研究 ... 4 2.1 環保駕駛相關研究 ... 4 2.2 四分之一車輛懸吊模型相關研究 ... 6 2.2.1 被動式懸吊 ... 6 2.2.2 主動式懸吊 ... 6 2.2.3 半主動式懸吊 ... 7 2.3 半車輛懸吊模型相關研究 ... 8 第三章、車輛系統模型 ... 10 3.1 懸載質量動態模型 ... 10 3.2 懸吊模型 ... 11 3.2 輪胎模型 ... 15 第四章、控制器設計 ... 17 4.1 震動標準 ... 17 4.2 輸入線性化 ... 18 4.3 系統控制性 ... 20 4.4 外擾模型 ... 22 4.5 H控制器 ... 28 4.6 下層控制器 ... 32 第五章、模擬與結果討論 ... 35 5.1 定速通過顛簸路面與本控制器之比較 ... 35 5.2 減速通過顛簸路面與本控制器之比較 ... 44 第六章、結論與未來展望 ... 49 6.1 結論 ... 49 6.2 未來展望 ... 49 參考文獻 ... 51圖目錄
圖 1-1、系統架構圖 ... 2 圖 2-1、模型預測控制,本圖引用自[1] ... 5 圖 2-2、模型預測控制,本圖引用自[2] ... 5 圖 2-3、被動式懸吊 ... 6 圖 2-4、主動式懸吊 ... 7 圖 2-5、半主動式懸吊 ... 7 圖 2-6、最佳化控制方塊圖,本圖引用自[4] ... 8 圖 3-1、半車輛動態模型 ... 10 圖 3-2、懸吊系統模型 ... 12 圖 3-3、路面顛簸設定圖 ... 14 圖 3-4、本模型與 Carsim 之俯仰角()比較 ... 14 圖 3-5、本模型與 Carsim 之質心移動(z)比較 ... 15 圖 3-6、輪胎旋轉自由體圖 ... 16 圖 4-1、控制架構圖 ... 17 圖 4-2、對 Wc 之投影大小 ... 22 圖 4-3、顛簸路面圖路面一(左上)、路面二(右上)、路面三(左下) ... 23 圖 4-4、路面一前後輪雜訊圖 ... 23 圖 4-5、路面二前後輪雜訊圖 ... 24 圖 4-6、路面三前後輪雜訊圖 ... 24 圖 4-7、路面一訊號延遲與交叉相關性圖 ... 25 圖 4-8、路面二訊號延遲與交叉相關性圖 ... 25 圖 4-9、路面三訊號延遲與交叉相關性圖 ... 26 圖 4-10 前輪雜訊對 az波德圖 ... 27 圖 4-11、前輪雜訊對波德圖 ... 28圖 4-12、 H控制器之架構圖 ... 29 圖 4-13、乘上人體感受權重之開路系統、閉迴路系統與其控制器輸出 ... 31 圖 4-14、閉路系統響應除以開路系統響應之大小於 3~8Hz ... 31 圖 5-1、路面四高度圖 ... 36 圖 5-2、路面五高度圖 ... 37 圖 5-3、模擬一人體感受垂直加速度:前座(左圖)與後座(右圖) ... 37 圖 5-4、模擬一人體感受縱向加速度 ... 38 圖 5-5、模擬一引擎提供力矩(左圖)與功率(右圖) ... 38 圖 5-6、模擬二人體感受垂直加速度:前座(左圖)與後座(右圖) ... 38 圖 5-7、模擬二人體感受縱向加速度 ... 39 圖 5-8、模擬二引擎提供力矩(左圖)與功率(右圖) ... 39 圖 5-9、模擬三人體感受垂直加速度:前座(左圖)與後座(右圖) ... 39 圖 5-10、模擬三人體感受縱向加速度 ... 40 圖 5-11、模擬三引擎提供力矩(左圖)與功率(右圖) ... 40 圖 5-12、模擬四人體感受垂直加速度:前座(左圖)與後座(右圖) ... 40 圖 5-13、模擬四人體感受縱向加速度 ... 41 圖 5-14、模擬四引擎提供力矩(左圖)與功率(右圖) ... 41 圖 5-15、模擬五人體感受垂直加速度:前座(左圖)與後座(右圖) ... 41 圖 5-16、模擬五人體感受縱向加速度 ... 42 圖 5-17、模擬五引擎提供力矩(左圖)與功率(右圖) ... 42 圖 5-18、模擬六人體感受垂直加速度:前座(左圖)與後座(右圖) ... 42 圖 5-19、模擬六人體感受縱向加速度 ... 43 圖 5-20、模擬六引擎提供力矩(左圖)與功率(右圖) ... 43 圖 5-21、模擬七之車速變化 ... 45 圖 5-22、模擬八之車速變化 ... 46
圖 5-23、模擬九之車速變化 ... 47 圖 5-24、模擬十之車速變化 ... 48
表目錄
表 3-1 車輛參數表 ... 13 表 4-1 最大交叉相關性與其延遲取樣 ... 26 表 6-1 前後座垂直加速度與縱向加速度方均根值 ... 43 表 6-2 模擬一~六前後座震動比和耗能 ... 44 表 6-3 模擬七前後座震動比和耗能 ... 45 表 6-4 模擬八前後座震動比和耗能 ... 46 表 6-5 模擬九前後座震動比和耗能 ... 46 表 6-6 模擬十前後座震動比和耗能 ... 47符號表
X:車體前進方向 Z:垂直地面向上之方向, Y:ZX 之方向 Fzf:懸吊系統作用於懸載質量前輪軸所受之力 Fzr:懸吊系統作用於懸載質量後輪軸所受之力 Fxf:前輪提供之正向力 Fxr:後輪提供之正向力 CG0:車輛靜止不動時的質心位置 CG:是車輛的現在質心位置 x V :車體質心的縱向速度 z V :懸載質量的垂直速度 :懸載質量質心沿 Y 軸順時鐘旋轉之俯仰角 r l :車輛質心至後輪軸之距離 f l :車輛質心至前輪軸之距離 z:質心在垂直方向上與靜止位置時的偏移量 0 h :車體靜止時質心到地面的距離 m:懸載質量 um:非懸載質量 y I :車體懸載質量質心沿 Y 軸轉動之轉動慣量 df:前輪軸之外擾 dr:後輪軸之外擾 Cf:前輪輪胎剛度Cr:後輪輪胎剛度 f w :前輪轉速 r w :分別為前後輪的轉速 f :前輪滑動比 r :後輪滑動比 T:引擎或煞車對後輪所施加之合力矩 w I :輪胎之轉動慣量 R:輪胎半徑
第一章 緒論
1.1 研究背景與動機
近年來由於氣候異常,使得環保意識抬頭。尤其是在京都議定書簽訂之後,節能減 碳這議題更受到重視,並陸續推廣於交通載具與電力系統等民生相關領域。因此環保駕 駛(Eco-driving)的觀念也逐漸成形。環保駕駛提倡不猛踩油門或煞車、有目的的變換 車道、根據路況合理的調節速度等等,故有許多學者提出有關環保駕駛的研究[1][2]。 在[3]中提到所有被浪費的燃料中有 22%來自不預期的加減速,但就大部分駕駛者而言, 在通過顛簸路面之前會將車速降低以減少駕駛者所感受到的震動,且沒有經驗或是沒有 環保駕駛概念的駕駛者,或許會過度剎車以致無法兼顧舒適度與耗能,甚至駕駛者太晚 發現前方有顛簸路段而錯失反應時機,造成通過顛簸路面時的不適感。但不管是急速煞 車導致耗能過度或是沒有適當的反應而使震動過大皆不是駕駛者想要的結果。 在降低車輛的震動這方面有許多相關研究,像是主動式懸吊(active suspension)、半 主動式懸吊(semiactive suspension)等等,都有不錯的研究成果。但主動式懸吊畢竟是較 為昂貴且不易維修的配備;而搭載被動式懸吊之一般車輛若想要減少通過顛簸路面之震 動只能透過減速來減少震動。所以本研究提出了透過控制輪胎力矩進而影響車輛俯仰角 等動態的方式來減少乘客所感受到的震動,輪胎力矩的控制適用於一般被動式懸吊車輛。 換言之,本研究將基於傳統搭載被動式懸吊且驅動模式為後輪驅動的車輛,設計一種對 抗路面顛簸的系統,使駕駛者能藉由此系統以一種較為節能的方式來降低所感受到的震 動,不須要求駕駛者在通過未知的顛簸路面前做出最符合環保駕駛的反應。1.2 研究目的
本研究的目的在於設計一個不同於以急煞車來降低車輛震動的方法:使用較小的能 量來降低路面顛簸產生的震動之車輛運動控制系統,此系統針對車輛的垂直移動與俯仰角轉動兩個自由度做控制。在本研究中控制器可分為三個部分:上層控制器、輸入線性 化、下層控制器。因為本研究中所採用的車輛模型為非線性模型,所以需要透過輸入線 性化讓上層控制器所看到的模型是線性的,以便於在上層控制器採用 H控制器。H控 制器可以對抗在車輛速度、質量等參數變化所造成之不確定性,且使得本系統可以利用 ISO 對人體在不同方向和不同頻段所感受加速度之定義,對垂直和縱向加速度做頻域上 之權重,計算出抑制車輛垂直震動所需的線性化縱向加速度,然後透過輸入線性化轉成 車輛所需的實際加速度,最後考慮到輪胎受到不同正向力所造成之不確定性利用順滑模 態法則設計下層控制器來控制後輪輪胎的力矩來產生上層控制器所需的縱向加速度,如 圖 1-1 所示 Plant HooController Input Linearization Lower Comtroller Noise ax_ref’ ax_ref z T ax,Vx,wr,wf 圖 1-1 系統架構圖
1.3 研究貢獻
對駕駛者而言在行經顛簸路面之前做出能降低車輛震動且符合環保駕駛概念之反 應不甚容易,而一般降低車輛震動的研究大多為主動式懸吊或半主動式懸吊,主動式懸 吊利用致動器產生一個額外的力來降低震動,而半主動式懸吊則是調整懸吊的阻尼值來 降低震動,但是這兩種方式皆需要額外加裝所費不貲的機構。而本研究則是考慮一般搭 載被動式懸吊之後輪驅動車輛,透過上層控制器分配出一個比急煞車更符合環保駕駛之 縱向加速度,和控制車輛輪胎的力矩來降低車輛通過顛簸路面時之震動。1.4 論文架構
論文各章節的編排如下: 第一章 緒論:描述研究背景、動機與目的。第二章 相關研究:介紹各種不同降低車輛震動和節能駕駛的方法,然後簡介本研究所 使用的控制方法。 第三章 車輛系統模型:本研究所使用的車輛模型為一個考慮車輛俯仰角速度、垂直速 度、懸吊系統、輪胎轉動的動態模型。 第四章 控制器設計:包含上層控制器、輸入線性化、下層控制器。 第五章 模擬與結果討論:模擬不同路面下控制器控制的結果。 第六章 結論與未來展望:總結本研究並提出未來更能深入發展的方向。
第二章 相關研究
在有關減少車輛耗能和降低車輛震動的研究,近年來都有相當多的學者提供不同的 控制策略,在環保駕駛方面像是控制進氣閥、齒輪箱或是根據環境調整駕駛行為等等。 而在降低車輛的震動這方面也有相當多的學者利用不同的車輛結構和模型來提出許多 的控制策略。底下將對根據環境整駕駛行為之環保駕駛和半車輛模型針對不同的懸吊系 統和控制方式等研究加以探討。2.1 環保駕駛相關研究
近年來由於環保議題越來越被重視,而據根據交通部資料,在臺灣運輸部門之能源 消耗僅次於工業部門,不僅臺灣世界各國也都撥出相當經費投注於環保駕駛上如[3]有 10 個國家總共 33 個單位參與。以下將介紹兩篇根據環境變化而調整駕駛行為之對環保 駕駛加以探討。M.A.S. Kamal, M. Mukai, J. Murata and T. Kawabe 在[1]中提到在道路上跟隨前方車輛 時由控制油門來達成減少耗能之目的。將速度和加速度考慮為引擎燃油效率之參數,利 用模型預測控制(model predictive control)在 t 時間考慮一段 T 時間內之成本函數
min t T ( , , ) t u J L x u p dt
,其中 2 2 1 2 3 2 4 2 1 3 2 ( f ) ( T) ( d ) L w w a w x V w h x x x x 1 2 3 4 [ ] x x x x x 分別為(本車位置、本車速度、前車位置、前車速度)、 u 為油門角度,p 為前車加速度、f 為燃油消耗、a 為車輛加速度、VT為路段速限、hd為與前車之安全距 離。換言之 L 代表了對燃油效率、加速度、速限、安全距離做權重。滿足車輛動態模型 等式限制x f x u( , )和對油門上限等式限制, 2 2 2 max ( ( ), ( )) ( ) d( ) ( ) 0 C x t u t u t u t u t ,其入 uopt流程示意圖如圖 2-1
圖 2-1 模型預測控制[1]
而相同的團隊 M. A. S. Kamal, M. Mukai, J. Murata, and T. Kawabe 在[2]中提到根據電 子地圖知道前方路段之坡度,由控制油門來達成減少耗能之目的。一樣利用模型預測控 制(model predictive control)在 t 時間考慮一段 T 時間內之成本函數
min t T ( ( '), ( ')) ' t u J L x t u t dt
,與上述不同的地方則在於車輛動態模型(x f x u( , ))中考慮 了坡度的影響。流程示意圖如圖 2-2 圖 2-2 模型預測控制[2]2.2 四分之一車輛懸吊模型相關研究
為了增加乘客的舒適度懸吊系統是必不可少的,在汽車發展的歷史上懸吊系統也佔 了一席之地。從十九世紀早期英國的馬車以普遍裝有彈簧來減震,到 1903 年,德國的 Mors 汽車公司首次將車輛安裝了減震筒,之後被動式懸吊系統大多可等效為由彈簧和 阻尼所組成的架構。現今,由於車用電子的發展,許多汽車愛好者也不吝加裝主動式懸 吊來增行車舒適度。 2.2.1 被動式懸吊 最基本的懸吊架構(四分之一車輛模型)如圖 2-3,在懸載質量(sprung mass)與非懸載 質量(unsprung mass)間有彈簧和阻尼兩個被動元件。被動式懸吊的優點是成本低廉,缺 點是彈簧與阻尼的參數不能即時調整以至於效能不及主動式與半主動式懸吊。 懸載質量 非懸載質量 阻尼 彈簧 輪胎壓縮係數 路面 圖 2-3、被動式懸吊 2.2.2 主動式懸吊 主動式懸吊的架構如圖 2-4,跟被動式懸吊比較起來,在懸載質量與非懸載質量間 多了制動器,所以能根據車體動態提供外力來抑制懸載質量的震動。優點是抑制震動的效果良好,缺點是需要額外的能量輸出、系統複雜度高且非常昂貴。 懸載質量 非懸載質量 阻尼 彈簧 輪胎壓縮係數 路面 制動器 圖 2-4、主動式懸吊 2.2.3 半主動式懸吊 半主動式懸吊的特則介於主動式和被動式之間,其架構如圖 2-5,利用可調式阻尼 來降低不同的路面干擾對車體的震動。其缺點與優點也介於兩者之間,效能比被動式好 但比主動式差,成本則是主動式低但比被動式高。 懸載質量 非懸載質量 可變阻尼 彈簧 輪胎壓縮係數 路面 圖 2-5、半主動式懸吊
2.3 半車輛懸吊模型相關研究
主動式懸吊控制一向被視為最能降低車體震動的方式,相關的研究和控制器的設計 也都陸陸續續地被提出。而其中以半車輛模型來設計的控制器則是考慮了車體俯仰角和 質心高度將會對前後輪的造成不一樣的影響,以下將介紹三篇利用半車輛模型來設計控 制策略的論文。
R. Krtolica and D. Hrovat 在[4]中提出以一種以主動式懸吊來降低車體震動,並 且避免懸吊系統進入非線性區的方法:考慮成本函數 2 2 2 2 2 2 1 2 3 4 5 6 0 lim z T f r r f T J w a w w z w z w u w u dt
並將其最小化。其中a 為懸載質量質心z 垂直加速度; 為俯仰角加速度;zf、z 分別為前後輪懸吊壓縮量;r uf 、u 分別為前r 後輪致動器輸出;w ~1 w 為正實數。利用線性轉換、解 Ricatii equation 等方法得到解析6 解。 圖 2-6、最佳化控制方塊圖[4]ShinqJen Wu et al.在[5]中利用 Fuzzy rule 考慮了系統的非線性影響,然後再利用
optimal fuzzy control 來降低成本函數
0 ( ( )) [ T( ) ( ) T( ) ( )] J u x t Lx t u t Pu t dt
。其中 8 LR 、 2 PR 為對稱半正定矩陣,x t Lx t 表示對車體懸載質量前後輪軸、懸載質量質心和T( ) ( ) 前後輪的移動距離的權重: u t Pu t 表示對耗能的權重。 T( ) ( ) 主動式懸吊除了降低車體震動外,也可以影響縱向動態。Andrew Alleyne 在[6]中提出 一個透過控制 ABS 和主動式懸吊來減低煞車距離的方法。在緊急煞車時 ABS 會將輪胎 的控制在能產生最大縱向力的滑動比附近,且在煞車時根據前後輪受到不一樣的正向力, 故透過主動式懸吊增加正向力可讓輪胎產生更多的縱向煞車力進而達到減少煞車距離 的目的。 在上述研究中,主動式懸吊利用致動器來降低車體震動的效果十分顯著,但主動式 懸吊畢竟是昂貴且不易維修之設備,並非一般車輛上會有的配備。在[6]中提出了正向力 和縱向動態可互相影響的想法,而這與本論文的想法也有可借鏡之處。 在本研究中控制架構可分為三個部分:上層控制器、輸入線性化、下層控制器。透 過輸入線性化,可用發展相當完備的線性理論來設計上層控制器,上層控制器計算出抑 制車輛震動所需的線性化縱向加速度,然後透過輸入線性化轉成車輛所需的實際加速度; 下層控制器藉由控制後輪輪胎的力矩來產生上層控制器所需的縱向加速度。第三章 車輛系統模型
本章節將介紹本研究中使用的車輛系統模型,此模型為一個五個自由度的車輛模型 和一個線性的輪胎模型。五個自由度包含:車輛縱向速度運動、垂直速度運動、俯仰角 速度運動、以及前後輪胎之旋轉動態。3.1 懸載質量動態模型
本論文所採用的懸載質量模型為半車輛(half car)模型,即不考慮側向運動與滾動 (rolling)動態,如圖 3-1:
z
X
Z
F
zfF
zrl
fl
rF
xrF
xfCG
h
0CG
0 圖 3-1、半車輛動態模型 本模型所使用之坐標系為世界坐標系:X 方向為車體前進方向,Z 方向為垂直地面向上之方向,Y 為ZX 之方向。Fxf 為前輪所提供之縱向力,F 為後輪所提供之縱向xr 力,Fzf為懸吊系統作用於懸載質量前輪軸上之力,F 為懸吊系統作用於懸載質量後輪zr 軸上之力。假設懸載質量運動的動態只受上述四個力的作用,不去考慮空氣阻力的影響 和車輛左右兩面的差異。利用牛頓第二定律推導得知車輛動態方程式,表示如(3.1~3) 2( ) / ( ) x xr xf V F F m um (3.1) 0 [F lzr r F lzf f 2(Fxr Fxf)(z h )] /Iy (3.2) ( ) / z zf zr V F F mg m (3.3) CG0是車輛靜止不動時的質心位置;CG 是車輛的現在質心位置;V 表示車體質心的縱x 向速度、V 表示懸載質量的垂直速度;z 為懸載質量質心沿 Y 軸順時鐘旋轉之俯仰角; r l 代表車輛質心至後輪軸之距離;lf 代表車輛質心至前輪軸之距離;z 代表質心在垂直 方向上與靜止位置時的偏移量;h 為車體靜止時質心到地面的距離;m 為懸載質量、um0 為非懸載質量、Iy為車體懸載質量質心沿 Y 軸轉動之轉動慣量
3.2 懸吊模型
本論文的懸吊系統模型如圖 3-2 所示,假設懸吊系統皆操作於線性區內,則懸吊系 統提供給前後輪軸正向力Fzf F 可表示如下。 zrUi 懸載質量 圖 3-2、懸吊系統模型 2( ) 2( ) r zf f f f r f f zr r r r r f mgl F kU DU d l l mgl F kU DU d l l (3.4) k 、D為彈簧與阻尼係數;Uf、U 分別為前後輪懸吊系統的壓縮量;r df、d 分別為作r 用於前輪軸和後輪軸之外界干擾。由圖 3-1 所知在俯仰角為小角度的假設下 f f r r U z l U z l (3.5) 將(3.5)代入(3.4)可得懸載質量前後輪軸所受合力Fzf、Fzf如(3.6) 2[ ( ) ( )] 2[ ( ) ( )] r zf f f f r f f zr r r r r f mgl F k z l D z l d l l mgl F k z l D z l d l l (3.6) 與其他懸吊模型不同的地方在於,本研究中未考慮非懸載質量的位移,而是將路面 干擾等效為作用於前後輪軸上的力。為了驗證此模型的合理性,本論文將以 Carsim[7] 之複雜模型進行驗證。以 Carsim 模擬定速 15m/s 之車輛行駛十五秒通過顛簸路面,為 了抵銷初始狀態不同造成的差異,所以將路面的前五十公尺設為平坦路面,接下來將通
過一百公尺長的顛簸路面後再進入平坦路面,其路面如圖 3-3。取得前後輪軸所受合力 (Fzf、Fzf)質心位置(zh0)與俯仰角()後,將其帶入(3.6)中再進行移項,可得前後輪 軸雜訊(df、d )如(3.7) r { 2[ ( ) ( )]} { 2[ ( ) ( )]} r f zf f f r f f r zr r r r f mgl d F k z l D z l l l mgl d F k z l D z l l l (3.7) 以 matlab 模擬此雜訊輸入於(3.1) (3.2) (3.3) (3.6)所組成的模型中,檢視其動態是否與 Carsim 動態吻合,模擬參數如表 3-1。 表 3-1 車輛參數表 參數名稱 數值(單位) 參數名稱 數值(單位) k 40(N/mm) y I 1523(kg-m2) D 11.4(N*sec/mm) m 1274(kg) f l 1.016(m) um 142(kg) r l 1.562(m) h 0 0.54(m)
圖 3-3、路面顛簸設定圖 圖 3-4、本模型與 carsim 之俯仰角()比較 0 20 40 60 80 100 120 140 160 180 200 -15 -10 -5 0 5 10 15 20 distance(m) h e ig h t( m m ) 0 5 10 15 -0.02 -0.01 0 0.01 0.02 0.03 0.04 time(s) th e ta (r a d s ) proposed model carsim model
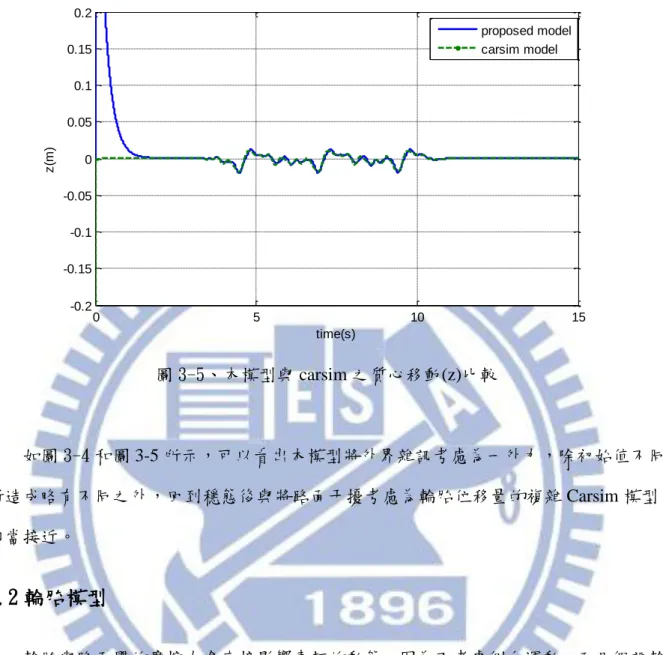
圖 3-5、本模型與 carsim 之質心移動(z)比較 如圖 3-4 和圖 3-5 所示,可以看出本模型將外界雜訊考慮為一外力,除初始值不同 所造成略有不同之外,回到穩態後與將路面干擾考慮為輪胎位移量的複雜 Carsim 模型 相當接近。
3.2 輪胎模型
輪胎與路面間的摩擦力會直接影響車輛的動態,因為不考慮側向運動,而且假設輪 胎將工作在線性區。所以本論文所採用的輪胎模型為線性模型,及輪胎所產生的摩擦力(Fxf 、F )為滑動比(slip ratio)乘上輪胎剛度(tire stiffness),如(3.7)所示。 xr
xf f f xr r r F C F C (3.7) 其中Cf 、C 分別為前後輪的輪胎剛度;r f、r則分別為前後輪的滑動比表示如(3.8) max{ , } max{ , } r x r r x f x f w R v w R v w R v w R v (3.8) 0 5 10 15 -0.2 -0.15 -0.1 -0.05 0 0.05 0.1 0.15 0.2 time(s) z (m ) proposed model carsim model
考慮到車輛為後輪驅動,並藉由輪胎轉動自由體圖如圖 3-6 和力矩平衡,可推得動態方 程式如(3.9)。 ( ) / ( ) / r xr w f xf w w T F R I w F R I (3.9) 其中wf、w 分別為前後輪的轉速;T 為引擎或煞車對後輪所施加之合力矩;r I 為輪胎w 之轉動慣量;R 為輪胎半徑。
w
i
F
xi
R
T
圖 3-6、輪胎旋轉自由體圖第四章 控制器設計
本章節將介紹本研究的控制器設計。包含上層控制器、輸入線性化和下層控制器。 上層控制器將於 4.1 節介紹人體對震動的感受標準(ISO 2631-1-1997)[8],此標準描述人 體在不同頻率下對不同方向的震動感受程度有所不同,所以可以此標準為參考設計控制 器;於 4.2 節將對車輛模型進行輸入線性化使上層控制器所控制之受控場為 LTI 系統, 以便使用 H來設計上層控制器;於 4.3 節分析縱向加速度對系統垂直震動的控制性來 預期此設計所能達到的效能;4.4 節將分析外界干擾並將其簡化;4.5 節考慮到車輛速度、 質量等參數變化所造成之不確定性,和 ISO 2631-1-1997 裡描述人體對加速度感受在頻 域上的變化,針對此兩點使用 H控制器並設計合適的頻域權重來計算出所需的縱向加 速度;4.6 節下層控制器將介紹線性輪胎模型,並考慮路面顛簸時輪胎之正向力變化所 造成之模型不確定性來設計順滑模態控制器,控制輪胎力矩來產生上層控制器所要求的 縱向加速度。整個系統的控制架構圖,如圖 1-1。 Plant HooController Input Linearization Lower comtroller Noise ax_ref’ ax_ref z T ax,Vx,wr,wf 圖 4-1 控制架構圖4.1 震動標準
受到的加速度來評估,但由於人體構造的原因所以人體對不同方向不同頻率的加速度有 不同的感受值,實際加速度值必須通過不同之頻率權重後才是人體感受到的加速度值。 表示如(4.1) (4.2) (4.3)。(4.1)中a 為實際加速度, i W 為頻率權重,i a 為人體感受到之加wi 速度;(4.2)表示對 x,y 方向之頻率權重;(4.3) 表示對 z 方向之頻率權重。 wi i i a W a (i=x,y,z) (4.1) 3 , 2 2 2 4961004.2688 ( 12.57) ( 3.554 6.317)( 19.95 157.9)( 888.4 394800) x y s s W s s s s s s s (4.2) 3 2 2 2 2 2 31006276.6803 ( 78.54)( 16.36 221.7) ( 3.554 6.317)( 23.13 443)( 124.7 6169)( 888.4 394800) z s s s s W s s s s s s s s s (4.3) 而感受加速度(a )在峰值因數(crest factor)小於九的情況下以其方均根植作為指標。如wi (4.4) a 為加速度指標。 ki 2 0 1 ( ) T ki wi a a t dt T
(i=x,y,z) (4.4) 對應不同的目的(舒適、健康、暈車)可對三個方向的指標做權重後再取其 2-norm 則可得 一個評估人體是否舒適的數值,如(4.5) 2 2 0.5 ( ) v i ki a
k a (4.5) 得a 為判斷人體舒適之數值,若以舒適度為考量則v kx kt kz 1。4.2 輸入線性化
根據(3.1)(3.2)(3.3)我們得知車體之動態方程式 2( ) / ( ) x xr xf V F F m um (3.1)0 [F lzr r F lzf f 2(Fxr Fxf)(z h )] /Iy (3.2) ( ) / z zf zr V F F mg m (3.3) 將(3.1)移項整理得 (FxrFxf)0.5(m um V ) x (4.6) 並將(4.6)代入(3.2)得 0 [F lzr r F lzf f V m um zx( )( h )] /Iy (4.7) (4.7)為非線性微分方程式,令Vx'V zx( h0)代入(4.7)中可得 [F lzr r F lzf f Vx'(m um)] /Iy (4.8) 若將V 視為控制輸入,整理(3.3)(3.6)(4.8)可得線性狀態方程組 x' 2 2 2 2 0 1 0 0 0 0 0 2 ( ) 2 ( ) 2 ( ) 2 ( ) ( ) ' 0 0 0 0 1 0 0 1 2 ( ) 2 ( ) 4 4 0 1 r f r f f r f r f r y y y y y y y x f f r f r K l l D l l K l l D l l l l m um I I I I I I I X X V d K l l D l l K D m m m m m m r d AX BVx'B dp1 f B dp2 r (4.9) 其中X [ ] z z T
2 2 2 2 1 2 0 1 0 0 0 2 ( ) 2 ( ) 2 ( ) 2 ( ) ( ) , 0 0 0 1 0 2 ( ) 2 ( ) 4 4 0 0 0 , 0 0 1 1 r f r f f r f r y y y y y f r f r f r y y p p K l l D l l K l l D l l m um I I I I I A B K l l D l l K D m m m m l l I I B B m m
4.3 系統控制性
本小節將分析系統之控制性來探討以控制縱向加速度來降低震動之方法有何限制。在 不考慮干擾的情況參考慮(4.9)令 2 ( ) 2 ( ) 4 4 , [ f r f r ] z K l l D l l K D Y a C m m m m 可得X AX BVx' Y CX (4.10) 將表 3-1 車體參數帶入(4.10)中可得其可控性格拉姆矩陣(controllability gramian matrix)[9] 0 0.0000471474 0 -0.0000142199 -0.0000319992 0 0.00841702 0.0000319992 -0.00094157 -0.0000142199 0.0000319992 0.00000463196 0 -0.0000319992 -0.00094157 0 0.000296469 T At T A t c W e BB e dt
(4.11) 其特徵值 9 1 2 3 4 [ ] [ 3.52791*10 0.00004462 0.00019576 0.0085249] 與其所對應的特徵向量 1 2 3 4 0.3097 0.9268 0.2122 -0.0004 0.0002 0.0249 -0.1110 -0.9935 [ ] 0.9502 -0.3097 -0.0344 -0.0037 0.0341 0.2108 -0.9703 0.1137 v v v v 根據[10]可知特徵值越小則需要越多輸入能量才能將系統狀態往其所對應之特徵向量方 向移動,若考慮控制質心垂直加速度 az,則可透過計算 C 對v ~1 v 的投影量大小可知道4 控制a 是否需要許多能量,亦即可判別控制 az z的難易程度。
1 2 3 4
2 C v v v v C =
-0.9679 -0.0392 0.2441 0.0445 (4.12)
得知a 在整個系統最不可控之方向(z v )之投影量大於其他三個方向許多,可預期用縱向1 加速度來控制質心垂直加速度的效果不會太好,且因乘客舒適度需要同時考慮三軸加速 度,故在考量縱向加速度不可過大的情況下質心位置之舒適度無法被提升太多。雖然質 心位置之垂直加速度難以控制,但考慮到駕駛者之位置不是在質心上,故選擇駕駛者所 在位置之垂直加速度做為評估。參考(4.9),並令 1 1 2 2 2 2 2 2 2 ( ) 2 ( ) 4 4 0 ( ) [ ] , , 2 ( ) 2 ( ) 2 ( ) 2 ( ) f r f r T z r f r f f r f r y y y y y K l l D l l K D m m m m C D m um Y a K l l D l l K l l D l l C D I I I I I 可得 1 1 2 2 ' ' x x C D X AX BV Y X V C D (4.13) 令Pazr (C1rC X2) rD V2 x' (4.14) P 為在質心前 r 公尺位置之垂直加速度,可以看出若是想要降低 P,除了用Vx'直接控制 外就是利用 X 來影響。以下將進行 P 對 Wc之特徵向量投影之分析,將(4.14)進行移項後 得 2 x' ( 1 2) P rD V C rC X (4.15) 計算(C1rC2)對 Wc之特徵向量之投影量絕對值p ~1 p 。4
1 2
1 2 3 4 1 2 3 4 1 2 2 ( ) ( ) C rC p p p p v v v v C rC (4.16) 1 p 越大則代表(C1rC2)在最不可控制狀態的分量越大,也就更不容易以小量的輸入來控制;反之p 則越大則代表4 (C1rC2)在最容易控制狀態的分量越大,也就比較容易以 小量的輸入來控制。根據 r 的變化可以看出V 對該位置垂直加速度的控制性如圖 4-2。 x' 圖 4-2 (C1rC2)對 Wc之投影大小 可以看出 p1在質心前方也大略是駕駛位置的地方下降的較多,得到駕駛位置垂直加速度 比較易於控制的結論,且後座不一定有人但駕駛位卻一定會有人坐,因此選擇降低駕駛 位置之垂直加速度來做為上層控制器設計的目的。
4.4 外擾模型
根據(4.9)車體同時受到了前後輪外擾的影響,但由於本系統考慮車輛沒有側向運動時 的動態,所以前後輪將通過同樣的路面,且本系統之前後輪懸吊參數相同,可以預期前 後輪雜訊之間有高度相關性。若忽略此相關性而將前後輪雜訊視為獨立干擾源,則設計 出的控制器會過於保守導致效能不佳。根據 (3.7)式,可從車輛動態得前後輪雜訊,以 下將以 Carsim 軟體模擬一初速 54km/h 之車輛在十秒內以等加速度加速到 64km/h 通過 -1.50 -1 -0.5 0 0.5 1 1.5 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1 r p ro je c ti o n p1 p2 p3 p4三段不同路面來驗證此猜測。路面如圖 4-3 圖 4-3、顛簸路面圖路面一(左上)、路面二(右上)、路面三(左下) 0 20 40 60 80 100 120 140 160 180 -40 -30 -20 -10 0 10 20 30 40 distance(m) h e ig h t( m m ) 0 20 40 60 80 100 120 140 160 180 -20 -15 -10 -5 0 5 10 15 20 25 distance(m) h e ig h t( m m ) 0 20 40 60 80 100 120 140 160 180 -40 -30 -20 -10 0 10 20 30 40 distance(m) h e ig h t( m m ) 0 1 2 3 4 5 6 7 8 9 10 -2 -1.5 -1 -0.5 0 0.5 1 1.5x 10 4 time(s) fo rc e (N ) f zr f zf
圖 4-5、路面二前後輪雜訊圖 圖 4-6、路面三前後輪雜訊圖 由上面圖 4-4~4-6 可以看出,前後輪雜訊大概相差了一個延遲時間,以下將利用前後輪 雜訊延遲時間與交叉相關性分析(Cross-correlation)[11]來進一步驗證。 0 1 2 3 4 5 6 7 8 9 10 -1 -0.8 -0.6 -0.4 -0.2 0 0.2 0.4 0.6 0.8 1x 10 4 time(s) fo rc e (N ) f zr fzf 0 1 2 3 4 5 6 7 8 9 10 -2 -1.5 -1 -0.5 0 0.5 1 1.5x 10 4 time(s) fo rc e (N ) f zr fzf
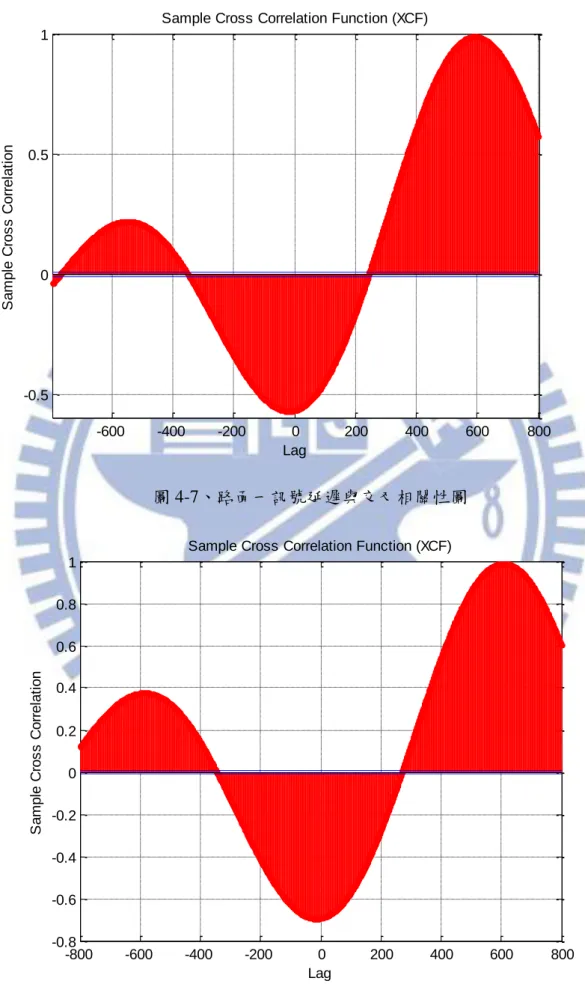
圖 4-7、路面一訊號延遲與交叉相關性圖 -600 -400 -200 0 200 400 600 800 -0.5 0 0.5 1 Lag S a m p le C ro s s C o rr e la ti o n
Sample Cross Correlation Function (XCF)
-800 -600 -400 -200 0 200 400 600 800 -0.8 -0.6 -0.4 -0.2 0 0.2 0.4 0.6 0.8 1 Lag S a m p le C ro s s C o rr e la ti o n
圖 4-9、路面三訊號延遲與交叉相關性圖 圖 4-7,8,9 代表前輪雜訊(fzf)延遲某個取樣時間後與後輪雜訊(fzr)之交叉相關性,其最大交 叉相關性與其對應之延遲取樣如表 4-1 表 4-1 最大交叉相關性與其延遲取樣 延遲取樣 最大交叉相關性 路面一 594 0.9913 路面二 607 0.9888 路面三 622 0.9888 前輪雜訊大概在延遲 600 個取樣時間後與後輪雜訊有接近 1 最大相關性,可得知兩訊號 在此延遲時間下可視為同一訊號,而取樣時間為 0.00025sec 即後輪雜訊落後前輪雜訊約 0.15 秒。而在模擬中前後輪軸長 2.578 公尺,平均速度 16.4m/s,即後輪會落後 0.1572 -800 -600 -400 -200 0 200 400 600 800 -0.8 -0.6 -0.4 -0.2 0 0.2 0.4 0.6 0.8 1 Lag S a m p le C ro s s C o rr e la ti o n
秒通過相同路面起伏,與上述結果一致。 若考慮縱向加速度不大,使得縱向速度幾乎不變,則可將前後輪雜訊表示如(4.17)之形 式。 ( ) ( ) s r f d s d s e (4.17) 為了能將此關係運用在上層控制器,須將 s
e 轉為真分轉移函數(proper transfer function)
在此利用 Padé[12]法做近似,考慮時速 15m/s、前後輪軸距 2.578 公尺。令 2.578 0.172 15 近似結果如下。 2 2 2 2 2 2 ( 98.88 2546)( 86.94 2824)( 58.56 3590) ( ) ( 98.88 2546)( 86.94 2824)( 58.56 3590) s s s s s s s Pa s s s s s s e s (4.18) 以下分別看到令d sr( )df( )s es和令d sr( )df(s Pa s) ( )時,前輪雜訊對系統 az和的響 應。 圖 4-10、前輪雜訊對 az波德圖 -160 -140 -120 -100 -80 -60 -40 M a g n itu d e ( d B ) 10-1 100 101 102 103 104 -540 -360 -180 0 180 P h a s e ( d e g ) Bode Diagram Frequency (rad/sec) dr=exp(-0.172s)df dr=Pa(s)df
圖 4-11、前輪雜訊對波德圖 由前輪對系統響應圖發現在頻率 50rad/s 以下 Padé 法可成功的近似 s e 。如此一來我們 可將前輪雜訊到後輪雜訊之間的關係表示為狀態方程式(4.19) X +D d f f f f f r f f f f X A X B d d C (4.19) 其中 1 ( ) f( f) f f Pa s C sIA B D
4.5
H控制器
在古典控制的 PID 或 Lead-Lag 控制器以及現代控制的狀態回授控制,均為設計極點 的位置使系統達到控制目標。然而,若系統受到外在干擾、雜訊,或者是系統之參數因 為某些狀況發生而改變時,將會容易使極點偏離原本的位置,使系統響應結果偏離預計 之結果,甚至會使其產生不穩定的現象。 而 H控制器[14]除了具有相當的穩健性外,其主要目的在於降低外界輸入對所選定 輸出變數的 H範數,故可以利用對輸出變數做頻域的權重來降低外界干擾對輸出變數 -200 -150 -100 -50 M a g n itu d e ( d B ) 10-1 100 101 102 103 104 105 -17280 -11520 -5760 0 5760 P h a s e ( d e g ) Bode Diagram Frequency (rad/sec) dr=exp(-0.172s)df dr=Pa(s)df特定頻段的響應,這也是在時域裡做最佳化控制所無法達到的結果。 本小節將利用前四個小節的內容來做為設計 H控制器之參考,H控制器之架構圖如 圖 4-12 圖 4-12、 H控制器之架構圖 其中 w 為外界輸入、z 為欲降低之輸出、y 為回授訊號、u 為控制器輸出。若能將其關係 整理表示為下列形式 1 2 1 11 12 2 21 22 H H H H H H H H H X A X B w B u z C X D w D u y C X D w D u 則可利用 matlab tool 算出控制器 K 使得 w 到 z 之轉移函數的 H範數最小。在本系統中 w 為前輪雜訊(df); 1 2 ( z ) x w a r z w V ,其中 (azr)為在質心後方 r 公尺之垂直加速度, 根據控制性分析選擇r=-0.8 來降低駕駛位置垂直加速度 ,Vx為縱向加速度,w 、1 w 分別為對垂直加速度和縱向加速度之權重;2 y z zT; ' x uV 。
根據 ISO 規範選擇 2 1 3 2 1513 1.51 006 1.621 008 ( ) 57 307.1 0.03854 s e s e w s s s s 3 2 2 3 2 11.1 2.532 004 1.444 007 2.389 006 ( ) 102 2661 7085 s e s e s e w s s s s 並將其表示為狀態方程式形式 ( ) ( ) ( ) ' ' z z z z z z z z z z x x x x x x v v v x X A X B a r a r C X D a r X A X B V v C X D V (4.20) 其中 1 1( ) z( z) z z w s C sIA B D , 1 2( ) x( x) x x w s C sIA B D 根據(4.9) (4.13) (4.19) (4.20)整理如下 1 2 1 11 12 2 21 22 H H H H H H H H H X A X B w B u z C X D w D u y C X D w D u 其中X [ x x x xz x f] 2 1 2 2 1 1 2 0 0 ( ) 0 ( ) 0 0 0 0 0 0 1 ( ) , 0 0 p f f r f z z z y H x f p f p f r f f z z y y H H x f A B C C rl C B C rC A B m I A A A B D B B D l D l B rm B r m I I B B B B
1 1 2 0 ( ) , 0 0 0 0 0 0 f r f z z z y H H x C rl C D C C D m I C C I C 11 12 21 22 1 ( ) ( ) , , 0, 0 0 f r f f x z y y H H H H x D r l D l D rm D I m I D D D D D 參照下列圖 4-13,圖 4-14,開路系統未和閉迴路系統與其控制器輸出的頻譜響應的比較結果可以得知設計的 H控制器能在 3~8Hz 的頻段內,有效地降低路面顛簸至駕駛座 的震動 10%~15%。 圖 4-13、乘上人體感受權重之開路系統、閉迴路系統與其控制器輸出 圖 4-14、閉路系統響應除以開路系統響應之大小於 3~8Hz -110 -100 -90 -80 -70 -60 -50 M a g n itu d e ( d B ) 101 102 -180 0 180 360 P h a s e ( d e g )
closed and open felt
Frequency (rad/sec) open loop closed loop a_x 3 3.5 4 4.5 5 5.5 6 6.5 7 7.5 8 0.82 0.84 0.86 0.88 0.9 0.92 0.94 0.96 0.98 1 1.02 M a g n itu d e ( a b s ) Bode Diagram Frequency (Hz)
4.6 下層控制器
在 4.5 節 H控制器計算出輪胎應該產生的縱向加速度。假設實際的輪胎縱向加速度 為a ,下層控制器的目的是希望在輪胎剛度的不確定條件下,仍能有效控制後輪轉矩使x 實際之縱向加速度a 與上層控制器所分配之期望縱向加速度x axref 相等,故設計順滑模態 控制器[13]做縱向加速度跟隨,計算控制輸入力矩(T)來控制輪胎的動態。 設計一順滑平面,如(4.21) x xref Sa a (4.21) 須滿足迫近條件(Approaching condition): SS n S ,當S0 (4.22) 其中 n>0。 考慮到隨正向力不同將會造成輪胎剛度有模型不確定性再根據(3.1)(3.8)(3.9)得 2 [( ) ( ) ] x r r r f f f a C C m (4.23) r 、f 為未知之變動量,來自於輪胎受不同正向力時線性模型與 Carsim 模型之差異,假設其變動範圍0Cr_ min (Cr r) Cr_ max,0Cf_ min (Cf f)
將縱向加速度(a )對時間做一次微分 x 2 [( ) ( ) ] x r r r f f f a C C m (4.24) 當後輪產生正的縱向力時(0)時 r x r r w R V w R ,將滑動比對時間做一次微分,且利用 輪胎旋轉方程式(3.9)得
' ' ' ' 2 2 2 1 ( ) r x r r x r x r x r x r r x x xr r r w w R V w R V w R V w R V w R V w R w R V V T F R w R w I R (4.25) 同樣地,當後輪產生負的縱向力時(0)時 r r x x w R V V ' ' ' ' 2 2 1 ( ) r x r x r x r x x r x r x xr x r x w x w R V V w R V w R V V w R V w R V R T F R V w R V I V (4.26) 而前輪在速度為正時因為不能提供正的力矩所以滑動比小於零,類似(4.26)之推導得 ' ' ' ' 2 2 2 1 f x f x f x f x x f x f x xf x r x w x w R V V w R V w R V V w R V w R V F R V w R V I V (4.27)
令 2 1 2 _ _ T=F r w [ x sgn( ) sgn( ) 0.5 * * sgn( ) sgn( )] xr x ref x ref x r w I R V R k S M M k m a S a V w R (4.28) 減速時 令T=F w x[ x 2r 1sgn( ) sgn( ) 0.5 2* * _ sgn( ) sgn( _ )] xr x ref x ref x I V V w R R k S M M k m a S a R V (4.29) 其中 2 2 xf x f x w x F R V w R M V I V 將(4.24~29)代入(4.22)中須滿足迫近條件 _ _ 1 2 _ _ _ 1 2 _ _ 1 ( )( ) 2 { [ ( ) ( )( sgn( ) sgn( ) 0.5 * * sgn( ) sgn( )] } 2 { [ ( ) sgn( ) ( ) sgn( )] [ ( ) sgn( ) sgn( )] } 2 { [ ( x x ref x x ref
f f r r x ref x ref x ref r r f f r r x ref x ref r r SS a a a a C M C k S M M k m a S a a S m k C S C M M k C S a a S m k C m 2 _ _ 1 2 _ ) ( ) sgn( ) sgn( )] [ ( ) sgn( ) sgn( )] } 2 { } f f r r x ref x ref x ref C M S M k C a S a S T M T a S m n S 其中 1 _ max 2 1 2 1 2 _ min _ min _ [ ] ( 1) 1 , , 0.25 , 0.5 f r r x ref T C T m k k T n T n C C M a
第五章 模擬與結果討論
在此將利用 Carsim 軟體模擬本研究中的控制器所設計的車輛,將會模擬以不同初 速通過兩不同顛簸路面。模擬結果最後會於 5.1 小節中與不加任何輪胎力矩通過顛簸路 面做比較,不加任何輪胎力矩可視為模擬駕駛者不理會顛簸或是自動巡航時的反應,可 驗證本控制器有降低震動之效果於;於 5.2 小節中與降低車速通過顛簸路面結果做比較, 降低車速可視為駕駛者欲降低震動時之反應,可驗證本控制器有節省耗能之效果。模擬 所使用的車輛為 Carsim 軟體裡之 C-Class,Hatchback 其參數如表 3-1。5.1 定速通過顛簸路面與本控制器之比較
本
小節進行六次模擬來驗證本控制器之效能:分別以三種不同的初速通過兩種不同 路面,路面四、五的高度圖如圖 5-1、5-2,路面四總長度為 220m,其顛簸路段在 50m~100m, 最高點與最低點約相差 33mm,約等同於廢棄路面或是碎石路之路況,其餘路段為一般 路面;路面五總長度為 130m 其顛簸路段在 50m~65m 為震幅 1.5mm 之弦波,約等同於 減速丘(speed hump)路況,其餘路段為一般路面。 本控制器將與不加控制力矩來通過顛簸路面的行駛狀況來比較以驗證此控制器在 將前後輪等效為定時間之延遲的狀況下有相當的穩健度可在車速偏離設計速度(15m/s) 時仍能降低震動。其中圖 5-3~20 中 akzr為質心後八十公分處人體感受到的垂直加速度; akzf為質心前八十公分處之感受到的垂直加速度; akx為人體感受到的縱向加速度;Ta 為引擎提供控制後輪加速之力矩; Pw Tr a為引擎所做之功;Force 為前後輪所受之正 向力。制器時前後座感受之垂直與縱向加速度之方均根值;Rakzru、Rakzfu、Rakxu分別為不加控 制力矩時前後座感受之垂直與縱向加速度之方均根值。E
P為引擎所提供之能量; _ Ratio f Ratio r_ 分別為前後座有加控制器與不加控制器之震動比,比例越低代表震動 降低越多;由表 6-1 可以看出前座之舒適度在車輛運動於比設計速度更高速時仍可被提 高,得知此控制器有相當的穩健度。而在車輛以低速通過顛簸路面時雖然前座垂直加速 度仍能降低,但此時因速度降低造成外界雜訊之頻率降得太低超出此控制器有效的控制 範圍且加上模型不確定性,造成在提供縱向加速度後不能有效地降低垂直加速度,使得 控制器不能有好的表現。如模擬二、五付出了額外的能量之後卻無法使前座震動有效降 低,更甚使震動增加;相反地,以更高速通過顛簸時讓外界雜訊落在控制器能控制地更 好的頻段,使得控制器有更佳的表現。且由前後輪正向力皆大於零的情況可得知模擬情 形並未發生輪胎懸空的狀況,所以本控制器能控制輪胎力矩以跟隨分配的縱向加速度。 圖 5-1 、路面四高度圖 0 20 40 60 80 100 120 140 160 180 200 -15 -10 -5 0 5 10 15 20 distance(m) h e ig h t( m m )圖 5-2 、路面五高度圖 模擬一:以 15m/s(54km/h)之初速通過路面四。 圖 5-3、模擬一人體感受垂直加速度:前座(左圖)與後座(右圖) 0 20 40 60 80 100 120 140 -15 -10 -5 0 5 10 15 distance(m) h e ig h t( m m ) 0 5 10 15 -4 -3 -2 -1 0 1 2 3 4 time(s) akz f (m /s ) uncontrolled proposed model 0 5 10 15 -3 -2 -1 0 1 2 3 time(s) akz r (m /s ) uncontrolled proposed model
圖 5-4、模擬一人體感受縱向加速度(左圖)與前後輪所受正向力(右圖) 圖 5-5、模擬一引擎提供力矩(左圖)與功率(右圖) 模擬二:以 12m/s(43.2km/h)之初速通過路面四 圖 5-6 模擬二人體感受垂直加速度:前座(左圖)與後座(右圖) 0 5 10 15 -1.5 -1 -0.5 0 0.5 1 1.5 time(s) akx (m /s ) uncontrolled proposed model 0 5 10 15 500 1000 1500 2000 2500 3000 3500 4000 4500 5000 5500 6000 time(s) Fo rc e (N ) proposed model Fzr proposed modelFzf uncontrolled Fzr uncontrolledFzf 0 5 10 15 0 50 100 150 200 250 300 350 400 450 500 time(s) Ta (N -m ) 0 5 10 15 0 0.5 1 1.5 2 2.5x 10 4 time(s) P o w e r( W ) 0 1 2 3 4 5 6 7 8 9 10 -3 -2 -1 0 1 2 3 time(s) akz f (m /s ) uncontrolled proposed model 0 1 2 3 4 5 6 7 8 9 10 -2 -1.5 -1 -0.5 0 0.5 1 1.5 time(s) akz r (m /s ) uncontrolled proposed model
圖 5-7、模擬二人體感受縱向加速度(左圖)與前後輪所受正向力(右圖) 圖 5-8、模擬二引擎提供力矩(左圖)與功率(右圖) 模擬三:以 20m/s(72km/h)之初速通過路面四 圖 5-9、模擬三人體感受垂直加速度:前座(左圖)與後座(右圖) 0 1 2 3 4 5 6 7 8 9 10 -1.5 -1 -0.5 0 0.5 1 1.5 time(s) akx (m /s ) uncontrolled proposed model 0 2 4 6 8 10 12 14 16 18 1500 2000 2500 3000 3500 4000 4500 5000 5500 time(s) Fo rc e (N ) proposed model Fzr proposed model Fzf uncontrolledFzr uncontrolled Fzf 0 1 2 3 4 5 6 7 8 9 10 0 50 100 150 200 250 300 350 time(s) Ta (N -m ) 0 1 2 3 4 5 6 7 8 9 10 0 2000 4000 6000 8000 10000 12000 14000 time(s) P o w e r( W ) 0 1 2 3 4 5 6 7 8 9 10 -6 -4 -2 0 2 4 6 time(s) akz f (m /s ) uncontrolled proposed model 0 1 2 3 4 5 6 7 8 9 10 -5 -4 -3 -2 -1 0 1 2 3 4 time(s) akz r (m /s ) uncontrolled proposed model
圖 5-10、模擬三人體感受縱向加速度(左圖)與前後輪所受正向力(右圖) 圖 5-11、模擬三引擎提供力矩(左圖)與功率(右圖) 模擬四:以 15m/s(54km/h)之初速通過路面五。 圖 5-12、模擬四人體感受垂直加速度:前座(左圖)與後座(右圖) 0 1 2 3 4 5 6 7 8 9 10 -1.5 -1 -0.5 0 0.5 1 1.5 time(s) akx (m /s ) uncontrolled proposed model 0 2 4 6 8 10 12 500 1000 1500 2000 2500 3000 3500 4000 4500 5000 5500 6000 time(s) Fo rc e (N ) proposed model Fzr proposed modelFzf uncontrolledFzr uncontrolled Fzf 0 1 2 3 4 5 6 7 8 9 10 0 100 200 300 400 500 600 700 time(s) Ta (N -m ) 0 1 2 3 4 5 6 7 8 9 10 0 0.5 1 1.5 2 2.5 3 3.5 4 4.5x 10 4 time(s) P o w e r( W ) 0 1 2 3 4 5 6 7 8 9 -5 -4 -3 -2 -1 0 1 2 3 4 time(s) akz f (m /s ) uncontrolled proposed model 0 1 2 3 4 5 6 7 8 9 -3 -2 -1 0 1 2 3 time(s) akz r (m /s ) uncontrolled proposed model
圖 5-13、模擬四人體感受縱向加速度(左圖)與前後輪所受正向力(右圖) 圖 5-14、模擬四引擎提供力矩(左圖)與功率(右圖) 模擬五:以 12m/s(43.2km/h)之初速通過路面五 圖 5-15、模擬五人體感受垂直加速度:前座(左圖)與後座(右圖) 0 1 2 3 4 5 6 7 8 9 -1.5 -1 -0.5 0 0.5 1 1.5 time(s) akx (m /s ) uncontrolled proposed model 0 2 4 6 8 10 500 1000 1500 2000 2500 3000 3500 4000 4500 5000 5500 6000 time(s) Fo rc e (N ) proposed model Fzr proposed modelFzf uncontrolled Fzr uncontrolled Fzf 0 1 2 3 4 5 6 7 8 9 0 100 200 300 400 500 600 time(s) Ta (N -m ) 0 1 2 3 4 5 6 7 8 9 0 0.5 1 1.5 2 2.5 3x 10 4 time(s) P o w e r( W ) 0 1 2 3 4 5 6 7 8 9 10 -3 -2 -1 0 1 2 3 time(s) akz f (m /s ) uncontrolled proposed model 0 1 2 3 4 5 6 7 8 9 10 -3 -2 -1 0 1 2 3 time(s) akz r (m /s ) uncontrolled proposed model
圖 5-16、模擬五人體感受縱向加速度(左圖)與前後輪所受正向力(右圖) 圖 5-17、模擬五引擎提供力矩(左圖)與功率(右圖) 模擬六:以 20m/s(72km/h)之初速通過路面五 圖 5-18、模擬六人體感受垂直加速度:前座(左圖)與後座(右圖) 0 1 2 3 4 5 6 7 8 9 10 -1.5 -1 -0.5 0 0.5 1 1.5 time(s) akx (m /s ) uncontrolled proposed model 0 2 4 6 8 10 500 1000 1500 2000 2500 3000 3500 4000 4500 5000 5500 6000 time(s) Fo rc e (N ) proposed model Fzr proposed modelFzf uncontrolled Fzr uncontrolled Fzf 0 1 2 3 4 5 6 7 8 9 10 0 50 100 150 200 250 300 350 400 450 time(s) Ta (N -m ) 0 1 2 3 4 5 6 7 8 9 10 0 2000 4000 6000 8000 10000 12000 14000 16000 18000 time(s) P o w e r( W ) 0 1 2 3 4 5 6 7 -6 -4 -2 0 2 4 6 time(s) akz f (m /s ) uncontrolled proposed model 0 1 2 3 4 5 6 7 -5 -4 -3 -2 -1 0 1 2 3 4 5 time(s) akz r (m /s ) uncontrolled proposed model
圖 5-19、模擬六人體感受縱向加速度(左圖)與前後輪所受正向力(右圖)
圖 5-20、模擬六引擎提供力矩(左圖)與功率(右圖)
表 6-1 前後座垂直加速度與縱向加速度方均根值 模擬情境 Rakzr Rakzf Rakx Rakzru Rakzfu Rakxu 路面一 15m/s 0.6309 0.9715 0.4197 0.7849 1.2012 0.0310 路面一 12m/s 0.4058 0.5572 0.2718 0.4057 0.6213 0.0241 路面一 20m/s 0.8777 1.2700 0.4606 1.2405 1.5666 0.0293 路面二 15m/s 0.5077 0.7291 0.3258 0.6475 0.8815 0.0261 路面二 12m/s 0.4214 0.5786 0.2822 0.4226 0.6471 0.0252 路面二 20m/s 0.6866 0.9751 0.3617 0.9437 1.2019 0.0250 0 1 2 3 4 5 6 7 -2 -1.5 -1 -0.5 0 0.5 1 1.5 2 time(s) akx (m /s ) uncontrolled proposed model 0 2 4 6 8 10 500 1000 1500 2000 2500 3000 3500 4000 4500 5000 5500 6000 time(s) Fo rc e (N ) proposed model Fzr proposed modelFzf uncontrolled Fzr uncontrolled Fzf 0 1 2 3 4 5 6 7 0 100 200 300 400 500 600 700 time(s) Ta (N -m ) 0 1 2 3 4 5 6 7 0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5x 10 4 time(s) P o w e r( W )
表 6-2 模擬一~六前後座震動比和耗能 模擬情境 2 2 2 2 _ kzf kx kzfu kxu Ra Ra Ratio f Ra Ra 2 2 2 2 _ kzr kx kzru kxu Ra Ra Ratio r Ra Ra 路面一 15m/s 0.8807 0.9647 路面一 12m/s 0.9971 1.4108 路面一 20m/s 0.8622 0.7988 路面二 15m/s 0.9056 0.9310 路面二 12m/s 0.9941 1.1981 路面二 20m/s 0.8652 0.8220 由此六次模擬得知雖然本控制器在低速時的表現不好,但在控制器所設計的速度下能 降低 7~12%的前座震動,在更高速時由於控制器的穩健性和更高頻外界的雜訊可使前座 降低 10~14%的震動。若考慮此控制器只於 15m/s 以上開啟,則可保證此控制器能有好的 表現。
5.2 減速通過顛簸路面與本控制器之比較
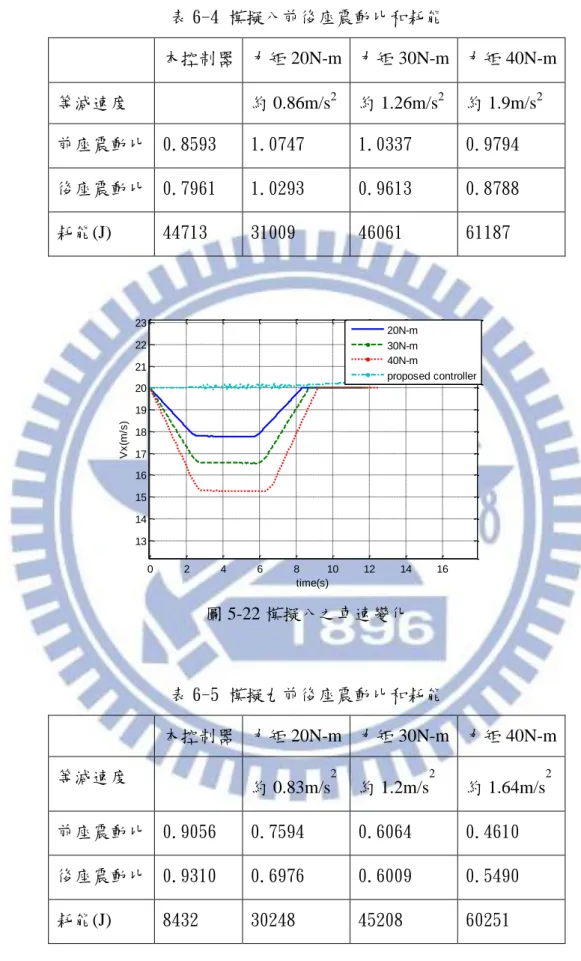
本小節將以四個模擬來分析駕駛者減速通過路面的耗能與舒適度且和本控制器做比 較。模擬七、八是模擬駕駛者於顛簸路面前有充足時間減速至較低速度來增進舒適度; 模擬九、十則是模擬駕駛者沒發現前方有顛簸路面,直到進入顛簸路段後才進行減速來 增進舒適度。 模擬七、八之路面如路面四在 50m~150m 間為顛簸路面其餘為平坦路面;模擬七將模 擬車輛以 15m/s 之車速利用等煞車力矩(等減速度)減速至顛簸路面,再以等速通過顛簸 路面,而後以等同煞車力矩大小之正力矩將車輛提升至初速,顛簸路面設定為路面四; 模擬八則將初始車速改為 20m/s。模擬九、十之路面如路面五,0m~100m 為顛簸路面, 其餘為一般路面。模擬九將模擬車輛以 15m/s 之車速在五十公尺內以等煞車力矩減速再 以定速通過後五十公尺之顛簸路面,最後再以等同煞車力大小之輪胎力矩將車輛提升至 初速;模擬十則將初始車速改為 20m/s。利用 ISO 規定將此四次模擬之前後座人體感受之震動作整理成表 6-3~6-6,前後座震 動比為該次模擬中之震動比上不加任何控制力矩通過之震動,此值越小代表降低震動效 果越佳;耗能的計算則是根據此模擬情境下初始與結束之動能相等,引擎所作之正功可 視為該次模擬中之能量損耗。由表 6-3、6-5 可得知本控制器能在降低震動的同時,讓耗 能與減速通過顛簸路面相比在大多數情形下來的少;而表 6-4、6-6 則說明了不當的煞車 不僅無法降低震動而且也更加耗能,在此情形下本控制器卻可以用更少的耗能來降低更 多的震動。而由圖 5-21~5-24 可看出減速通過路面不僅耗費更多的能量,而且也需要行 駛更長的時間來通過顛簸路面且把車速提升至初始速度。 表 6-3 模擬七前後座震動比和耗能 本控制器 力矩 20N-m 力矩 30N-m 力矩 40N-m 等減速度 約 0.83m/s2 約 1.2m/s2 約 1.64m/s2 前座震動比 0.8807 0.7735 0.6166 0.4784 後座震動比 0.9647 0.6574 0.5491 0.4844 耗能(J) 31560 30635 45517 60496 圖 5-21 模擬七之車速變化 0 2 4 6 8 10 12 14 16 18 7 8 9 10 11 12 13 14 15 16 17 18 time(s) V x (m /s ) 20N-m 30N-m 40N-m proposed controller
![圖 2-1 模型預測控制[1]](https://thumb-ap.123doks.com/thumbv2/9libinfo/8740685.204178/16.892.133.804.149.1111/圖21模型預測控制1.webp)

![圖 4-5、路面二前後輪雜訊圖 圖 4-6、路面三前後輪雜訊圖 由上面圖 4-4~4-6 可以看出,前後輪雜訊大概相差了一個延遲時間,以下將利用前後輪 雜訊延遲時間與交叉相關性分析(Cross-correlation)[11]來進一步驗證。 0123456789 10-1-0.8-0.6-0.4-0.200.20.40.60.81x 104time(s)force(N)fzrfzf012345678910-2-1.5-1-0.500.511.5x 104time(s)force(N)fzrfzf](https://thumb-ap.123doks.com/thumbv2/9libinfo/8740685.204178/35.892.161.746.124.988/可以看出前後輪雜訊大概相差了一個延遲時間以下將利進一步驗證.webp)