Chin-Teng Lin, Fellow, IEEE, Yu-Chieh Chen, Teng-Yi Huang, Tien-Ting Chiu, Li-Wei Ko*, Sheng-Fu Liang,
Hung-Yi Hsieh, Shang-Hwa Hsu, and Jeng-Ren Duann, Member, IEEE
Abstract—Biomedical signal monitoring systems have been
rapidly advanced with electronic and information technologies in recent years. However, most of the existing physiological signal monitoring systems can only record the signals without the capa-bility of automatic analysis. In this paper, we proposed a novel brain–computer interface (BCI) system that can acquire and an-alyze electroencephalogram (EEG) signals in real-time to monitor human physiological as well as cognitive states, and, in turn, pro-vide warning signals to the users when needed. The BCI system consists of a four-channel biosignal acquisition/amplification mod-ule, a wireless transmission modmod-ule, a dual-core signal processing unit, and a host system for display and storage. The embedded dual-core processing system with multitask scheduling capability was proposed to acquire and process the input EEG signals in real time. In addition, the wireless transmission module, which eliminates the inconvenience of wiring, can be switched between radio frequency (RF) and Bluetooth according to the transmission distance. Finally, the real-time EEG-based drowsiness monitoring and warning algorithms were implemented and integrated into the system to close the loop of the BCI system. The practical online test-ing demonstrates the feasibility of ustest-ing the proposed system with the ability of real-time processing, automatic analysis, and online warning feedback in real-world operation and living environments.
Manuscript received March 29, 2007; revised July 21, 2007. This work was supported by the National Science Council of the Republic of China under Contracts NSC-94-2218-E-009-031 and NSC-95-2221-E-009-002. Asterisk in-dicates corresponding author.
C.-T. Lin is with the Brain Research Center, and also with the Department of Electrical and Control Engineering, National Chiao-Tung University, Hsinchu 300, Taiwan, R.O.C. (e-mail: [email protected]).
Y.-C. Chen, T.-Y. Huang, and H.-Y. Hsieh are with the Brain Research Center, and also with the Department of Electrical and Control Engineering, National Chiao-Tung University, Hsinchu 300, Taiwan, R.O.C. (e-mail: mandychen. [email protected]; [email protected]; [email protected]).
T.-T. Chiu is with the Brain Research Center, and also with the Department of Industrial Engineering and Management, National Chiao-Tung University, Hsinchu 300, Taiwan, R.O.C. (e-mail: [email protected]).
*L.-W. Ko is with the Brain Research Center, and also with the Department of Electrical and Control Engineering, National Chiao-Tung University, Hsinchu 300, Taiwan, R.O.C. (e-mail: [email protected]).
S.-F. Liang is with the Department of Computer Science and Information Engineering, National Cheng-Kung University, Taiwan 701, Taiwan, R.O.C. (e-mail: [email protected]).
S.-H. Hsu is with the Department of Industrial Engineering and Manage-ment, National Chiao-Tung University, Hsinchu 300, Taiwan, R.O.C. (e-mail: [email protected]).
J.-R. Duann is with the Brain Research Center, National Chiao Tung Uni-versity, Hsinchu 300, Taiwan, R.O.C., and also with the Institute for Neural Computation, University of California, San Diego, CA 92093 USA. (e-mail: [email protected]).
Color versions of one or more of the figures in this paper are available online at http://ieeexplore.ieee.org.
Digital Object Identifier 10.1109/TBME.2008.918566
Index Terms—Brain–computer interface (BCI),
electroen-cephalogram (EEG), online, drowsiness detection, wireless.
I. INTRODUCTION
T
HE ADVANCE in sensor technology and information technology reduces the power consumption of the sensors and make the cost of production cheaper. These trends make it possible to embed sensors in different places or objects to measure a wide variety of physiological signals. A physiologi-cal signal monitoring system will be extremely useful in many areas if they are portable and capable of wirelessly monitoring target physiological signals and analyzing them in real time. However, most of the existing physiological signal monitoring systems can only record the signals without the capability of au-tomatic analysis. Recently, with the development of embedded system and signal processing technique, there is a tendency to apply the embedded system technique to brain–computer inter-face (BCI). An electroencephalogram (EEG) based BCI provide a feasible and noninvasive way for the communication between the human brain and the computer [1]–[7]. Traditionally, the variations of brain waveforms are measured and analyzed by personal computers (PCs). Due to the inconvenience of PC-based BCI that limits the user’s mobility, portable and inexpen-sive BCI platform—small devices with long battery life that can be carried indoors or outdoors—are desired [8].There are some studies regarding the portable BCI devices [9]–[11]. Gao et al. [9] used steady-state visual evoked poten-tial (SSVEP) to control environmental device, such as TV, video tape recorders, or air-conditioners. A portable pocket PC-based BCI was developed by Edlinger et al. [10]. In [11], Whitchurch
et al. developed a wireless system for long term EEG
mon-itoring of absence epilepsy. In [12], Obeid et al. proposed a telemetry system for single unit recording. However, these sys-tems mainly focused on the monitoring hardware, but not on real-time analysis. Real-time embedded systems combined with wireless transmission have become a trend of developing diag-nosis or homecare systems [13]–[17], because they provide a platform to build sensing and inexpensive BCI systems. Many extended applications may be more practicable to implement on the newer platforms whenever the smaller and more powerful devices are developed.
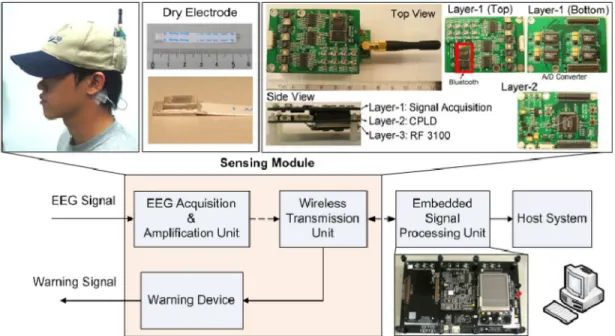
Fig. 1. Block diagram of the proposed BCI system.
The goal of this paper is to develop a real-time wireless embedded EEG-based BCI system that includes four-channel physiological signal acquisition, wireless transmission, and a dual-core embedded system with multitask scheduling. The pro-posed system employs signal acquisition and amplification units to collect EEG signals, and the wireless module for the transmis-sion of the recorded data can overcome the problem of wiring. With the wireless modules, the subject can carry a light-sensing module instead of wiring to the analysis system that provides the advantage of mobility. The function of the wireless trans-mission module is selectable between Bluetooth and a custom-made transmission radio frequency (RF) mode depending on different applications and locations. Since the processing of the EEG data needs a large number of calculations, the computing power of the embedded system becomes critical when selecting a suitable embedded processor. Therefore, a dual-core proces-sor integrating a DSP and an advanced reduced instruction set computer (RISC) machine (ARM) processor was used in our embedded system. A multitask scheduling mechanism was also implemented in the embedded system to enhance the real-time signal processing performance. The proposed structure makes it unique to other system designs in terms of its wireless trans-mission subsystem and dual-core embedded processors for con-venient use and powerful computational capability. Finally, a real-time drowsiness detection method combined with an on-line warning feedback is implemented in the developed BCI system for demonstration. Many traffic accidents on highways are caused by drivers’ drowsiness. Our previous studies discov-ered that some features in human EEG signals are highly related to drowsiness level [18], [19], and they can be used for estimat-ing driver drowsiness. After the online analysis of the EEG data by the multitask scheduling embedded system, the warning device will be triggered when the drowsiness condition occurs. This paper is organized as follows. The system architecture of the BCI system is introduced in Section II. The system
ap-plication in real-time driver’s drowsiness detection and warning is given in Section III. The results and discussions of the de-signed system and the application are given in Section IV. The conclusions are summarized in Section V.
II. SYSTEMARCHITECTURE
The block diagram of the developed EEG-based BCI system is shown in Fig. 1, which includes five units: 1) signal acquisition and amplification unit; 2) wireless data transmission unit; 3) embedded signal processing unit; 4) host system for data storage and real-time display; and 5) warning device. The three-layer sensing module provides 4-ch biomedical signal acquisition, amplification, and wireless transmission functions. The signal acquisition and amplification unit is placed on the top-side of layer 1, and the 8-b A/D converters are designed on the bottom-side of layer 1. Layer 2 is the complex programmable logic device (CPLD) module that controls A/D and wireless modules. For wireless transmission, RF3100 module is arranged in layer 3, and the Bluetooth module is placed on the top-side of layer 1. The size of the sensing module is 4.5 cm× 6.5 cm × 2.5 cm, and the weight of the module with a Li-ion battery is 51 g. The sensing module (including signal acquisition, amplification, and wireless units) is designed to operate at 400 mA with 3.7-V dc power supply, and its power consumption is about 1.11 W. The module can continuously operate for at least 45 h with a commercial 16 000 mAh Li-ion battery. In addition, the EEG signal processing unit (OMAP 1510) and the host system (PC) are powered with ac.
A. Signal Acquisition and Amplification Unit
In this paper, the dry electrodes [22] based on microelec-tromechanical systems (MEMS) technologies were placed on the subject’s forehead to acquire the EEG signal because they can overcome the uncomfortableness and inconvenience (e.g.,
Fig. 2. Detail architecture of the BCI system. (a) EEG acquisition and am-plifying unit. (b) Wireless transmission. (c) Dual-core signal processing unit. (d) Remote system for data storage and real-time display. (e) Warning device.
using electrolytic gel) of traditional EEG sensors. After signal acquisition, the amplification unit is applied to filter out the artifacts, as shown in Fig. 2(a). The EEG amplifying circuit consists of a preamplifier (a differential amplifier) with the gain of 100, an isolated amplifier to protect subject, a bandpass filter that was composed of a low-pass filter and a high-pass filter to reserve 1–100 Hz signals, a differential amplifier that had the gain of 10 or 50 (that can be chosen by a switch). The gain of the preamplifier (100) is larger than the amplifier (a gain of 10) because of the EEG signal is in microvolt level, and thus, larger amplification is needed before filtering. The capacity we used in the bandpass filter can compensate the dc-offset, thus there are no mechanism designed for the problem. The sensing module that carried by the subjects is designed to operate with a 3.7-V dc power supply, and the dc voltage can be either supplied by a battery or ac power line. Therefore, a 60-Hz notch filter is also included to eliminate the effect of the line noise in case we have to run the system with ac power.
B. Wireless Data Transmission Unit
Fig. 2(b) shows the wireless data transmission unit that in-cludes 8-b A/D converters (parallel output, sampling rate = 768 Hz, AD-7575, Analog Device, Inc.), a CPLD, and wireless modules. The acquired signal is first converted from analog to digital, and then, transmitted through the wireless modules. The ALTERA FLEX10K EPM 7128STC100-7 CPLD is employed
to control the A/D converter and encode the data for the wireless modules. Two different transmission methods can be selected in the wireless module of the designed BCI system according to the transmission distance in applications. Although Bluetooth mod-ule is most commonly used in medical/clinical settings where short-distance transmission is required, long-distance transmis-sion is sometimes desirable in the settings. In addition to drivers’ drowsiness estimation, the system is expected to be applied in various fields such as home cares, clinical physiological signal monitoring, and exercise training. Thus, we also integrated a custom-made RF transmission module with longer operation range in the developed system. RF 3100/3105 (Ancher Tech-nology, Inc.) module is a transparent module that integrates low transmission power and high transmission rate (76800 b/s) de-signs. The comparison of Bluetooth and RF3100/3105 is shown in Table I. The transmission rate is set as 19 200 b/s only in our final design to prevent transmission error, and it can still provide 295 Hz sampling rate for 4-ch signal transmission. This setting is quite enough for general EEG signal acquisition since the most concerned frequency band of EEG signals is during 1–60 Hz. The EEG signals are recorded at the higher sampling rate to preserve the original signal as well as possible for various appli-cations in addition to drowsiness estimation. Thus, the signals are recorded at a higher sampling rate and down-sampled to 64 Hz in the EEG signal analysis unit.
C. Dual-Core Processing Unit
It is expected that the portable biomedical devices should provide more advanced functions such as real-time feedback to the users in addition to online monitoring. Therefore, more complex processing methods have been proposed for physio-logical analysis, and they will produce more impacts if can be implemented in a real device or product. A dual-core processing unit is adopted as a platform that EEG signal processing meth-ods as well as the intelligent technology can be implemented on it for different applications due to its powerful computation power. The operating core is Texas Instruments (TI) open multi-media architecture platform (OMAP) 1510, which is composed of an ARM925 processor and a TMS320C55x DSP processor. The DSP core was used to process EEG data, and the ARM925 was used to communicate with other devices such as wireless transmission modules and transmission control protocol/ inter-net protocol (TCP/IP) inter-network. The DSP gateway is used as the
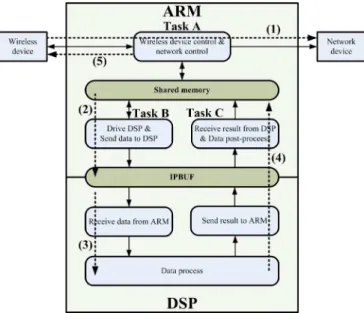
Fig. 3. Software structure of the embedded system and the data processing flow.
cooperation structure for the communication between the two cores since these two cores have different functions, as shown in Fig. 2(c). The DSP gateway is software that makes ARM core possible to use resource of DSP core by application pro-gram interface (API), and works like a small real-time kernel that manages the resource and data flow in the DSP core. With this mechanism, the DSP processor is on only when the system needs to process the EEG data. The Linux operating system (OS) is built to manage the resource of ARM core [20]. The func-tions of ARM core can be divided into three parts: 1) wireless module control; 2) TCP/IP control; and 3) DSP gateway driver. The ARM core was selected for these tasks due to its excellent interface control ability. The process flow and task distribution in the embedded system are shown in Fig. 3.
There are two processing flows running at the same time including EEG data acquisition and communication and EEG signal processing. The data processing flows are described as follows. 1) After receiving EEG data from wireless device, task A transmits the data to network. The EEG data are then stored in the shared memory. 2) After the EEG data are stored, task B enables the DSP module and sends data to DSP. 3) After DSP receives the EEG data, DSP processes the data with Hanning Window and short time FFT analysis. 4) After EEG analysis, DSP sends the result to ARM and ARM performs the other processes and saves the result to the share memory. 5) If the driver drowsiness is detected through EEG analysis, the embed-ded system will send the triggering signal to the warning device via wireless transmission.
Since the proposed BCI system is designed to work in real-time, the signal-receiving task should continue while EEG signal is on processing. An embedded multitask scheduling mecha-nism system is used to manage these tasks and to ensure the accurate sampling rate for EEG signal acquisition and data pro-cess/analysis in real time [21]. The tasks are divided into three types according to their working frequency: 1) task A—wireless device and TCP/IP control; 2) task B—call DSP task and
trans-Fig. 4. Time series diagram of multitask scheduling mechanism.
mit EEG data to IPBUF buffer; and 3) task C—receiving data from IPBUF buffer and further processing of the DSP processed data. The time series diagram of the multitask scheduling sys-tem is shown in Fig. 4. The working frequency of buffer IPBUF data transmission is much smaller than the working frequency of wireless device and TCP/IP control. Thus, we allowed the system continuously to receive signals from the wireless mod-ule and output to the display unit through TCP/IP. The system can decide when to process other tasks by itself. With the ar-chitecture, the ARM core will not only hold and wait, but also keep transmitting data from the wireless module to the dis-play unit when the DSP core is processing the EEG signals. Interprocess communication (IPC) is also an important issue for our scheduling system since the tasks in our system are not completely independent. In our system, ARM-Linux was used to manage tasks. Linux provides three methods for IPC: mes-sage queue, semaphore, and shared memory. Mesmes-sage queue and semaphore are not efficient enough for the proposed em-bedded system. Three modified communication methods are employed in the proposed BCI system for IPC: 1) a novel syn-chronization mechanism; 2) arbitration method; and 3) sharing memory buffer (IPBUF) between processing cores. Tradition-ally, the synchronization procedure is enabled when two tasks are accessing one memory block at the same time. The memory is blocked when one task is writing or reading on it, thus no other task can access to the memory. The synchronization pro-cedure unlocks the blocked memory when the first task finishes writing/reading, and then, sends a signal to inform other wait-ing tasks. It is obvious that the mechanism can largely decline the processing speed of the processor. A new synchronization mechanism is designed to deal with the simultaneous memory access by both receiving EEG data from EEG acquisition sys-tem (task A) and sending EEG data to DSP (task B). When task A is accessing the memory, task B will be idle and waste some time in waiting. Therefore, we use two blocks of memory with the same size to reduce the waiting time. When task A is storing EEG data on memory M1, task B can get the EEG data from memory M2 at the same time. With the modified procedure, these two tasks can execute concurrently and reduce the waiting time caused by synchronization control. Although the method consumes double memory size to complete the procedure, the required extra memory is less than 4K B. Besides, we use arbi-tration flag register instead of semaphore due to that the speed of flag register based on shared memory is the fastest IPC method in Linux platform. In addition, using flag register can reduce the amount of memory needed because one declared variable can contain many flags.
is TCP/IP protocol.
E. Warning Device
The warning device is combined in our system, as shown in Fig. 2(e). Visual signal and audio signal can be presented to the BCI users as the feedback warning signals. The audio signals are more effective in our prior study for driver drowsiness warning since it is easier to detect audio signals than visual signals for the driver when he/she is drowsy. The efficiency of audio signals with different frequencies, 500, 1750, and 3000 Hz, were tested in the prior study and the audio signal of 1750 Hz achieves the best results. The triggering signals are sending from the dual-core EEG signal-processing unit to the warning device through wireless transmission modules. The RF3100/3105 modules are half-duplex, which means that the modules cannot transfer and receive signals at the same time. Since the signals are transmit-ted as packages, a package of warning signal can be transmittransmit-ted in the time period between two packages of the acquired EEG signals for transmission. The time period between two packages might be too short for the reverse-direction transmission if the transmission frequency is set too high. To deal with the prob-lem, the transmission frequency is set lower to leave some time duration for the data transmission from the other end.
III. REAL-TIMEDRIVER’SDROWSINESSDETECTION ANDWARNING
With combining online EEG recording and wireless transmis-sion ability, the proposed BCI system is designed for real-time physiological signal analysis. Thus, a real-time drowsiness de-tection method combined with an online warning feedback is implemented in the developed BCI system for demonstration. A dynamic operating environment is also built up to test and verify the robustness of the BCI system.
A. Experiment Environment and Experimental Design
A virtual reality (VR) based highway-driving environment re-ported in our previous studies [18], [19] was used to investigate those changes on drivers’ cognitive states in long-hour driv-ing tasks. The VR drivdriv-ing environment includes 3-D surround scenes projected by seven projectors and a real car mounted on a 6-degree-of-freedom Stewart platform to provide the kines-thetic stimuli. The driving speed is fixed at 100 km/h, and the car is randomly and automatically drifted away from the center of the cruising lane to mimic the consequences of a nonideal road surface. The subject was asked to keep the car on the third lane (from left to right). Driving error is defined as the deviation
traditional wet electrode requires electrical gel to increase the conductivity between the electrode and the scalp. Thus, it takes time for preparation, and the subjects need to wash their hair after recording. For the convenience in practical applications, we place four dry electrodes [22] on the driver’s forehead and the distance between two near electrodes is 1.5 cm to acquire the EEG signals for the BCI system. The EEG features related to alertness changes can be extracted from EEG signals acquired by the electrodes at the forehead according to our experiments. Therefore, placing electrode array on the forehead is a feasible and convenient strategy for drivers’ drowsiness estimation. Six dry electrodes are used to acquire EEG signals from the driver including five electrodes placed on the subject’s forehead and one placed behind the subject’s left ear. The five electrodes we placed on subject’s forehead including a common ground elec-trode and four EEG elecelec-trodes. The ground elecelec-trode is directly connected to the ground of power supply. The EEG signals we used in further analysis are measured between the four EEG electrodes and the reference electrode. The dry electrodes and the sensing module can be embedded in a hat, as shown in Fig. 1. The combination of the dry electrodes and the sensing module has gradually improved the convenience and the future applicability of the developed system.
B. Data Processing Flow and Analyzing System Design
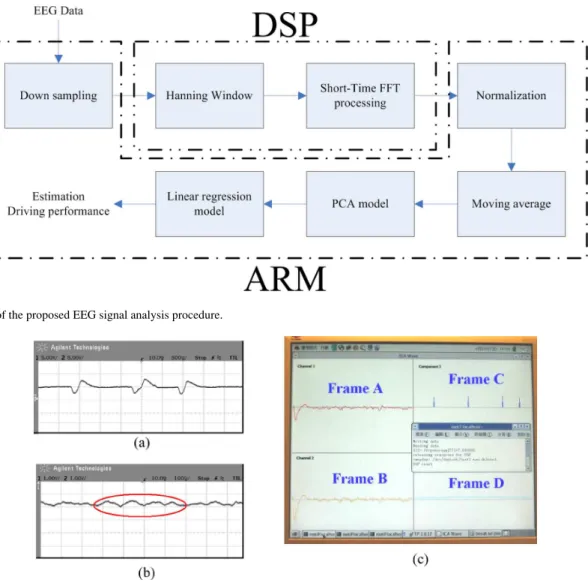
The analysis procedure implemented in the dual-core signal processing unit is shown in Fig. 5. The acquired EEG signals are first down-sampled to 64 Hz to reduce the calculation loading of the system, and a 64-pt Hanning window is then applied to smooth the signals. The short-time Fourier transform is used to extract the time–frequency characteristics of the EEG signals, and a 90-sec moving average filter is applied to eliminate the noise. We use principal component analysis (PCA) on the EEG power spectrum to reduce the data dimension and the compu-tational loading of the embedded system. The EEG features (dimension = 20) extracted by PCA are then fed into a linear regression model to estimate the driver’s drowsiness levels. The EEG signals collected in the first session were used to construct his/her drowsiness estimation model including the PCA method through offline training by the PC. The model including the PCA matrix is then load into OMAP 1510 to process and analysis the subject’s EEG signals in the other days in online and real-time for testing.
The main tasks of the embedded processor OMAP1510 was to process EEG data, wireless receiver control, and TCP/IP control. Thus, we distributed these tasks into DSP core and ARM core to retain satisfied performance. According to the
Fig. 5. Flowchart of the proposed EEG signal analysis procedure.
Fig. 6. Testing results of the acquisition/amplifying unit and the developed GUI monitoring interface.
characteristics of the processors, the calculation of driving error estimation needed to process a long period of EEG data, so it was implemented in ARM processor. On the other hand, the Hanning windowing and short-time FFT needs heavy compu-tation, and thus is implemented in the DSP core to balance the computation load. The remaining processes were implemented in ARM because they need relatively less computations.
IV. EXPERIMENTALRESULTS
The feasibility of the proposed BCI system is tested in three aspects. First, we test the basic functions including biomedical signal amplification/acquisition and wireless transmission of the system. The embedded multitask scheduling system will then be tested and compared with the system without scheduling. Finally, the accuracy of the embedded drowsiness monitoring system will be evaluated.
A. Test of the Basic Functions
The basic functions of the developed BCI system should be tested before any further applications. The subsystems are
de-signed in modules to make the system more flexible for dif-ferent applications. Thus, the test of the system can be divided into two phases, the subsystem testing and the overall-system testing. The acquisition/amplifying unit is tested for its depend-ability by three steps. First, a sin wave with frequency of 5 Hz and 30 µV vibration amplitude generated by the EEG simulator is used for simulation test. Then, EEG signals of eye blinking were test because the amplitude of the signals will be larger, and it is easy to be recognized from acquired signal. Finally, we want to measure α wave to confirm that the signal we measured is real EEG signal. When subjects take rest and close their eyes, we can continuously measure α wave with frequency band be-tween 8 and 12 Hz. Fig. 6(b) shows the α wave measured by the developed system.
After tested and verified the subsystems, we test and verify the whole system online. In order to show the processed re-sults of our system, we developed a Java GUI to receive the processed results of the embedded system by TCP/IP network and plot them on the display screen, as shown in Fig. 6(c). The left two frames are two-channel EEG raw data (frames A, B), and the right frames show the estimated drowsiness levels (frames C, D).
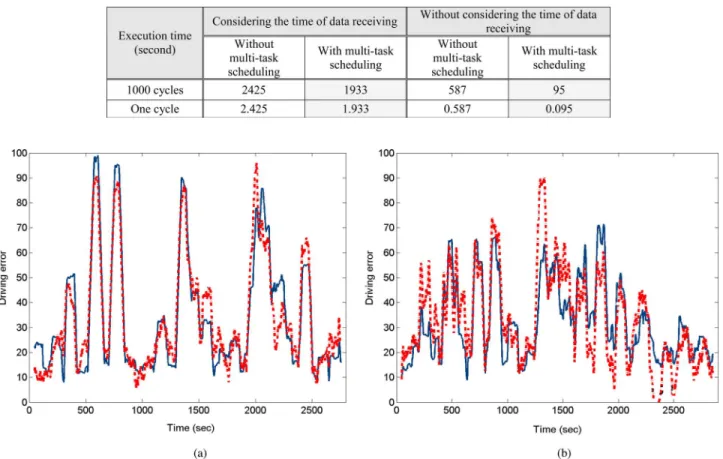
Fig. 7. Drowsiness level estimation implemented on the embedded BCI system for a session based on a linear regression (dashed line) of PCA-reduced EEG log spectra, overplotted against actual driving performance time series for the session (solid line). (a) Training session performance. (b) Testing session performance. B. Embedded Multitask Scheduling
The multitask scheduling mechanism was developed to en-sure the accurate sampling rate for EEG signal acquisition and data analysis in real time. In order to test the performance of the embedded multitask scheduling system, two-channel EEG data with sampling rate of 65 Hz were fed to the BCI system. The time consumptions of BCI system executing 1000 cycles of signal processing procedure in DSP with and without em-bedded multitask scheduling are compared, and the test results are shown in Table II. It takes 2425 sec to complete the 1000 cycles without multitask scheduling, whereas the system with multitask scheduling needs only 1933 sec. It is noted that the execution time is mainly used in receiving data. It takes 1838 sec for the system to receive data, which means it takes only 95 and 587 sec for 1000-cycle data processing with and without multitask scheduling, respectively. In average, it takes 1.933 and 2.425 sec to complete one data processing cycle (the drowsiness level in 2 sec) with and without multitask scheduling, respec-tively. If the time cost of data reception is not considered, the executing time will be reduced from 0.6 to 0.1 sec with embed-ded multitask scheduling. As a result, the embedembed-ded multitask scheduling system is useful to reduce the execution time and ensure the correctness of the received data. It takes about 1.933 sec to calculate a value of driving error. The result is shown in frame C of Fig. 6(c) as a peak. The time interval between two peaks is about 2 sec.
TABLE III
COMPARISONS OF THEESTIMATIONPERFORMANCE
C. Drowsiness Detection
In order to test and verify the feasibility of applying the developed embossed BCI system into practical applications, the drowsiness detection method proposed in Section III was implemented in the BCI system for online testing. Two different sessions of EEG signals are acquired in different day for each subject. The EEG data collected in the first session is used as training data to construct a driving error estimating system. The EEG data collected from the second session is then applied to the constructed estimating system to predict the drowsiness levels of the driver. The result is shown in frame C of Fig. 6(c) as a peak. The time interval between two peaks is about 2 sec. The amplitude of the peak represents the estimated driving error calculated by the drowsiness estimating system. The subject is considered drowsy if the value of driving error is bigger than a threshold and the warning device will be triggered. The correlation coefficient between the predicted drowsiness levels and the actual driving error acquired in the second session is calculated as an index of the system performance.
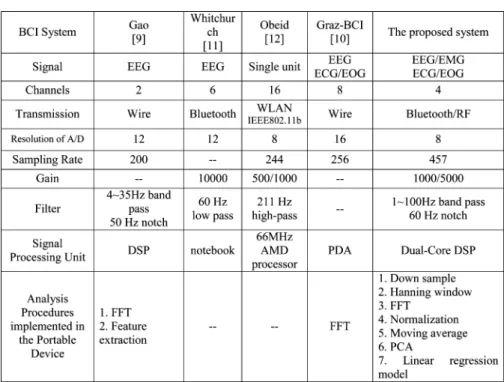
TABLE IV COMPARISON OFBCI SYSTEMS
The training and testing results of the drowsiness level esti-mation for subject 5 is shown in Fig. 7. The dash line in Fig. 7 indicates the drowsiness level estimated by the BCI system and the solid line is the acquired driving error. The comparison of the estimating performance for five individual subjects is given in Table III. The average correlation between the estimated and the acquired data among the five subjects can reach to 75%.
D. Comparisons and Discussions
The specifications of the proposed BCI system and the other existing systems are concluded in Table IV. Gao et al. [9] pro-posed an environmental controller using a BCI technique based on SSVEP, and the system consists of a stimulator, a digital sig-nal processor, and a trainable infrared sensing controller. They applied a FFT and a feature extraction mechanism in DSP to control the electric apparatus. The Graz-BCI [10] is a cue-based system using the imagery of motor action as the appropriate mental task. Whitchurch et al. [11] devised a wireless moni-toring system based on Bluetooth to enable the physician to monitor the EEG when the patient resumes his/her normal ac-tivities for the reason that the transmission band (2.4 GHz) is allowed in hospital. Obeid et al. [12] developed a 16-channel sensing telemetry system to facilitate multichannel single unit recordings from freely moving test subjects. The 16-channel signals derived from implanted neural electrodes were transmit-ted through IEEE 802.11 b. It only can work for 45 min without power supply due to large power consumption. Regarding to the proposed system, we used two different wireless transmission modules to ensure the flexibility of the proposed BCI system since the transmission distance of Bluetooth can only cover 10 m, while the RF module can cover more than 200 m. Users can easily switch between the two wireless modules depending
on different application environments. Seven procedures were implemented in the signal-processing unit, and the real-time ca-pability is also guaranteed due to the developed embedded mul-titask scheduling mechanism. It can also provide online warning signals when the abnormal state of uses such as drowsiness in driving appears.
V. CONCLUSION
A wireless embedded BCI system with real-time biosignals processing ability is proposed in this paper. It consists of a four-channel physiological acquisition and amplification unit, a wireless transmission unit, a dual-core signal-processing unit, a sensing real-signal display and monitoring unit, and a warning device. The EEG signal was first acquired by signal-acquisition and amplification unit, and then, transmitted from wireless data transmitter to wireless data receiver. The wireless-transmitted EEG signals were processed by the data processing unit, and the processed results were further transmitted to the sensing system for data storage, real-time display, or triggering the warning devices by TCP/IP. A multitask scheduling procedure was em-ployed in the dual-core signal-processing unit to enhance the efficiency of the embedded system and make sure the BCI sys-tem can properly work in real-time. A real-time drowsiness de-tection method combined with an online warning feedback was also implemented in the developed system for demonstration. This research provides the following important technologies: 1) a sensing module for signal acquisition, amplification, and wireless transmission; 2) a dual-core embedded system for real-time EEG signal processing; and 3) an automatic bio-feedback loop for online warning and reminding. With combining all the technologies, a flexible BCI platform is developed and can be applied to various applications.
Med. Biol. Eng. Comput., vol. 34, no. 5, pp. 382–388, 1996.
[2] C. Guger, A. Schl¨ogl, C. Neuper, D. Walterspacher, T. Strein, and G. Pfurtscheller, “Rapid prototyping of an EEG-based brain–computer interface (BCI),” IEEE Trans. Neural Syst. Rehabil. Eng., vol. 9, no. 1, pp. 49–58, Mar. 2001.
[3] J. J. Vidal, “Toward direct brain–computer communication,” Annu. Rev. Biophys. Bioeng., vol. 2, pp. 157–180, 1973.
[4] J. R. Wolpaw and D. J. McFarland, “Multichannel EEG-based brain– computer communication,” Electroenceph. Clin. Neurophysiol., vol. 90, pp. 444–449, 1994.
[5] M. Cheng, X. Gao, S. Gao, and D. Xu, “Design and implementation of a brain–computer interface with high transfer rates,” IEEE Trans. Biomed. Eng., vol. 49, no. 10, pp. 1181–1186, Oct. 2002.
[6] B. Obermaier, “Design and implementation of an EEC based virtual key-board using hidden Markov models” Ph.D. dissertation, Tech. Univ.-Graz, Graz, Austria, 2001.
[7] B. Obermaier, C. Neuper, C. Guger, and G. Pfurtscheller, “Information transfer rate in a five-classes brain-computer interface,” IEEE Trans. Neural Syst. Rehabil. Eng., vol. 9, no. 3, pp. 283–288, Sep. 2001. [8] L. Bianchi, F. Babiloni, F. Cincotti, M. Arrivas, P. Bollero, and M. G.
Marciani, “Developing sensing bio-feedback systems: A general-purpose platform,” IEEE Trans. Neural Syst. Rehabil. Eng., vol. 11, pp. 117–119, 2003.
[9] X. Gao, D. Xu, M. Cheng, and S. Gao, “A BCI-based environmental controller for the motion-disabled,” IEEE Trans. Neural Syst. Rehabil. Eng., vol. 11, no. 2, pp. 137–140, Jun. 2003.
[10] G. Edlinger, G. Krausz, F. Laundl, I. Niedermayer, and C. Guger, “Ar-chitectures of laboratory-PC and mobile pocket PC brain-computer inter-faces,” in Proc. 2nd Int. IEEE EMBS Conf. Neural Eng., Arlington, VA, Mar. 2005, pp. 120–123.
[11] A. K. Whitchurch, B. H. Ashok, R. V. Kumaar, K. Sarukesi, and V. K. Varadan, “Wireless system for long term EEG monitoring of absence epilepsy,” Biomed. Appl. Micro. Nanoeng., vol. 4937, pp. 343–349, 2002. [12] I. Obeid, M. A. L. Nicolelis, and P. D. Wolf, “A multichannel telemetry system for signal unit neural recording,” J. Neurosci. Methods, vol. 133, pp. 33–38, 2003.
[13] Y. H. Nam, Z. Halm, Y. J. Chee, and K. S. Park, “Development of sensing diagnosis system integrating digital telemetry for medicine,” in Proc. 20th Annu. Znt. Conf. IEEE Eng. Med. Biol. Soc., 1998, vol. 20, pp. 1170–1173. [14] W. C. Kao, W. H. Chen, C. K. Yu, C. M. Hong, and S. Y. Lin, “A real-time system for portable homecare applications,” in Proc. 9th Int. Symp. Consum. Electron. (ISCE 2005), vol. 14, pp. 369–374.
[15] F. Lamberti and C. Demartini, “Low-cost home monitoring using a Java-based embedded computer,” in Proc. 4th Annu. IEEE Conf. Inf. Technol. Appl. Biomed., Apr. 2003, pp. 342–345.
[16] L. Piccini, L. Arnone, F. Beverina, A. Cucchi, L. Petrelli, and G. Andreoni, “Wireless DSP architecture for biosignals recording,” in Proc. 4th IEEE Int. Symp. Signal Process. Inf. Technol., 2004, pp. 487–490.
[17] S. Kondra, C. Yew, F. Ahmed, and U. G. Hofmann, “Prototype of a patient monitoring device based on an embedded RISC/DSP system,” presented at the 39th Annu. Congr. German Society Biomed. Eng. (ICMP /BMT 2005), Nuremberg, Germany, Sep. 2005.
[18] C. T. Lin, R. C. Wu, T. P. Jung, S. F. Liang, and T. Y. Huang, “Estimating alertness level based on EEG spectrum analysis,” EURASIP J. Appl. Signal Process., vol. 19, pp. 3165–3174, 2005.
[19] C. T. Lin, R. C. Wu, S. F. Liang, W. H. Chao, Y. J. Chen, and T. P. Jung, “EEG-based drowsiness estimation for safety driving using independent component analysis,” IEEE Trans. Circuits Syst. I, vol. 52, no. 12, pp. 2726–2738, Dec. 2005.
[20] T. Kobayashi and K. Takahashi Linux DSP Gateway Specification Rev2.0, Nokia Corporation, Keilalahdentie, Espoo, Finland, Nov. 13, 2003. [21] J. W. S. Liu, Real-Time Systems. Englewood Cliffs, NJ: Prentice-Hall,
2000.
versity (NCTU), Taiwan, in 1986, and both the M.S. and Ph.D. degrees in electrical engineering from Purdue University, West Lafayette, IN, in 1989 and 1992, respectively.
He is currently the Chair Professor of Electri-cal and Computer Engineering, Dean of Academic Affairs, and Director of Brain Research Center at NCTU. He is a coauthor of Neural Fuzzy Systems– A Neuro-Fuzzy Synergism to Intelligent Systems (Prentice Hall), and the author of Neural Fuzzy Control Systems with Struc-ture and Parameter Learning (World Scientific).
Dr. Lin was the Distinguished Lecturer of the IEEE CAS Society from 2003 to 2005. Since 2004, he has been the President of Asia Pacific Neural Network Assembly. In 2000, he was also elected to be one of the 38th Ten Outstanding Rising Stars in Taiwan. He is currently serves as an Associate Editor of IEEE TRANSACTIONS ONCIRCUITS ANDSYSTEMS, Part I & Part II, IEEE TRANSAC
-TIONS ONSYSTEMS, MAN,ANDCYBERNETICS, IEEE TRANSACTIONS ONFUZZY
SYSTEMS, and the International Journal of Speech Technology.
Yu-Chieh Chen received the B.S. degree from Yuan-ze University, Taoyuan, Taiwan, R.O.C., in 2001, and the M.S. degree from Chang–Gung University, Taoyuan, in 2003, all in electrical engineering. She is currently working toward the Ph.D. degree at the National Chiao-Tung University, Hsinchu, Taiwan.
Her current research interests include artificial neural networks and biomedical signal processing.
Teng-Yi Huang received the B.S. degree in electri-cal engineering from the National Central Univer-sity, Taiwan, R.O.C., in 2002, and the M.S. degree in electrical and control engineering in 2004 from the National Chiao-Tung University (NCTU), Hsinchu, Taiwan, where he is currently working toward the Ph.D. degree.
His research interests are in the areas of biomed-ical signal processing, biofeedback control, and vir-tual reality technology.
Tien-Ting Chiu received the B.S. degree from the Department of Industrial Engineering, Chung Yuag Christian University, Taiwan, R.O.C., in 1994 and the M.S. degree in industrial engineering and engi-neering management from the National Tsing Hua University (NTHU), Hsinchu, Taiwan, in 1996. He is currently working toward the Ph.D. degree at the National Chiao-Tung University (NCTU), Hsinchu.
His current research interests include human fac-tors and man-machine systems.
Li-Wei Ko received the B.S. degree in mathemat-ics from National Chung Cheng University, Chiayi, Taiwan in 2001, and the M.S. degree in educational measurement and statistics from National Taichung University, Taichung, Taiwan in 2004. He then re-ceived the Ph.D. degree in Electrical and Control En-gineering (ECE) from National Chiao Tung Univer-sity (NCTU), Hsinchu, Taiwan in 2007.
He is currently a Research Assistant Professor in Department of ECE and Brain Research Center of NCTU in Taiwan. His research interests are in the area of machine learning, brain computer interface design, cognitive neural en-gineering, and biomedical signal processing.
Sheng-Fu Liang was born in Tainan, Taiwan, in 1971. He received the B. S. and M. S. degrees in control engineering from the National Chiao-Tung University (NCTU), Taiwan, in 1994 and 1996, re-spectively. He received the Ph.D. degree in Electrical and Control Engineering from NCTU in 2000.
From 2001 to 2005, he was a Research Assis-tant Professor in Electrical and Control Engineering, NCTU. In 2005, he joined the Department of Bio-logical Science and Technology, NCTU, where he served as an Assistant Professor. Currently, he is an Assistant Professor in the Department of Computer Science and Information Engineering, National Cheng-Kung University, Tainan, Taiwan, and is also a collaborative researcher of Brain Research Center, NCTU. His current research interests are biomedical engineering, biomedical signal/image processing, ma-chine learning, and multimedia signal processing.
Hung-Yi Hsieh received the B.S. degree in electrical engineering from Tamkang University, Taipei, Taiwan, R.O.C., in 2005, and the M.S. de-gree in electrical and control engineering from the National Chiao-Tung University (NCTU), Hsinchu, Taiwan, in 2007.
His current research interests include brain com-puter interface design and embedded system.
Shang-Hwa Hsu received the B.S. degree in psychol-logy from the National Taiwan University (NTU), Taipei, Taiwan, R.O.C., in 1974, and the M.S. and Ph.D. degrees in experimental psychology from Georgia University, Atlanta, in 1976 and 1980, respectively.
He is currently a Professor of Industrial Engi-neering and Management at the National Chiao-Tung University (NCTU), Hsinchu, Taiwan. His current research interests include human factors and man-machine system.
Jeng-Ren Duann received the B.S. and M.S. degrees in biomedical engineering from the Chung Yuan Uni-versity, Taiwan in 1990 and 1992, respectively. He then received the PhD degree in Physics from the Chung Yuan University in 1999.
He was a Research Associate at the Computa-tional Neurobiology Laboratory, The Salk Institute, San Diego, CA. He is currently an Assistant Project Scientist at the Institute for Neural Computation of the University of California, San Diego. He is the author of FMRLAB, a freely downloadable Matlab toolbox for functinal neuroimaging data analysis using independent component analysis (ICA). His research interests are in the areas of biomedical signal and image processing, bio-system simulation and modeling, structural and func-tional human brain mapping and applications in cognitive neuroscience, and functional cardiac imaging.