國 立 交 通 大 學
土 木 工 程 學 系
碩 士 論 文
以空載光達同步航空攝影製作高程模型品質探討
Analysis Of The DEM Quality Made Of Aerial
Images Simultaneously With Airborne Lidar
研 究 生:蔡建成
指導教授:史天元
中華民國九十八年七月
以空載光達同步航空攝影製作高程模型品質探討
Analysis Of The DEM Quality Made Of Aerial Images
Simultaneously With Airborne Lidar
研 究 生:蔡建成 Student:Jian-Cheng Tsai
指導教授:史天元
Advisor : Tian-Yuan Shih
國 立 交 通 大 學
土 木 工 程 學 系
碩 士 論 文
A Thesis
Submitted to Department of Civil Engineering College of Engineering
National Chiao Tung University in partial Fulfillment of the Requirements
for the Degree of Master in
Civil Engineering June 2009
Hsinchu, Taiwan, Republic of China
i
以空載光達同步航空攝影製作高程模型品質探討
學生:蔡建成
指導教授:史天元
國立交通大學土木工程學系
中文摘要
空載光達可快速獲得大量點雲,為高程模型製作之一項重要作業方式。著眼於同時 提供正射影像產品,目前空載光達各配置中幅航空攝影相機同步作業。雖然航空影像之 攝取並非為數值高程模型之製作,但是仍有此一潛力。本研究以大安溪蘭勢大橋附近河 道測量為例,以空載光達成果為檢核資料,探討伴隨空載光達所得之中像幅數位航空影 像,採用自動匹配方式製作數值高程模型之品質,並探討數位相機受輻射畸變差對高程 誤差的影響。 研究成果顯示,於明確定義點誤差分析,高程較差RMSE 為 0.5528 公尺。於坡度 與誤差分析,誤差隨坡度愈大則有愈大的趨勢,10°坡度間隔之高程較差 RMSE 介於 1.4685~7.9421 公尺之間。於植被覆蓋與誤差分析,人工林之高程較差 RMSE 可達 1.0046 公尺,自然林則可達1.4355 公尺。 中像幅數位量測相機受透鏡輻射畸變差影響相當大,比較進行透鏡輻射畸變差改正 與未改正成果,平均改正量為11.95 公尺,改正量標準偏差為 16.16 公尺。以空載光達 點雲成果為檢核資料,進行改正之RMSE 為 3.56 公尺,不進行改正則為 19.80 公尺。Analysis Of The DEM Quality Made Of Aerial Images
Simultaneously With Airborne Lidar
Student : Jian-Cheng Tsai
Advisor : Tian-Yuan Shih
Department of Civil Engineering
National Chiao Tung University
Abstract
Airborne LiDAR contribute a large number of 3D point clouds, which is one of the main methods to derive DEM. However, the aerial image taken simultaneously with an airborne lidar is potential for producing DEM. Focusing on provide orthoimage simultaneously,
airborne LiDAR equipped with digital middle format frame camera to obtain images, which is potential for producing DEM. In consequence, comparing with the airborne lidar, this study using riverway survey data of Taan River Lan-Shi bridge area analyses the quality of DEM that using automated matching aerial images, as well as the influence of height accuracy caused by radial distortion.
It is shown that the RMSE of the height difference value is 0.5528 m in the Well -defined point anaysis, while it is 1.4685~7.9421 m in 10° slope in the slope and error analysis. Steeper slope with the higher error is also proved. In vegetation coverage and error analysis, the RMSE of the height difference value in plantations and natural forest is 1.0046m, 1.4355 respectively.
The influence caused by the radial distortion was demonstrated. Comparing the heights resulting from automated matching with the corrected and un-corrected images,the bias is
iii
-11.95m, and the standard deviation is 16.16m. Comparing with the airborne lidar, the RMSE from the corrected image is 3.56m, while 19.80m for the un-corrected.
誌謝
研究所兩年的求學過程,承蒙恩師史天元教授於生活、課業與研究上細心的指導與 教誨,並且從老師身上學到研究與處事該有的態度與精神,在此致以最深的感謝。以及 感謝系上廖志中教授大力幫助。論文口試期間承蒙曾義星教授、蔡榮得教授與陳繼藩教 授對於論文給予指正並提供寶貴意見,在此一併獻上最誠摰的謝意。 在研究所就學期間,非常幸運可以與學長俊毅、歷韋及煥欽同間研究室,尤其感謝 俊毅學長在論文上不繼地提供寶貴意見,並且細心地與我討論,以及歷韋學長在畢業後, 也耐心提供技術支援與指導,讓我能順利完成論文。還要感謝老天爺,將恩銘、宏銳、 逸如與我聚在這個小家庭裡,一起唸書、分享與生活。並且感謝元宏學長、雅信、芳諭、 凱程以及大地組的明萬學長、炳宏、俊文在生活、學業與研究上的陪伴。最後感謝土木 系壘的隊友們,辛苦的練球與感動的戰役,已深深刻印在我心中。因為你們,讓我研究 所的生活充滿美好回憶。 最後感謝父母辛苦的養育與裁陪,以及姐姐與哥哥提供協助與適時的關心,讓我無 後顧之憂的完成研究所的學業,非常感謝。僅以此論文獻給我的家人與朋友們,並送上 難以言喻的祝福與感謝。v
目錄
中文摘要 ... I ABSTRACT ... II 誌謝 ... IV 目錄 ... V 圖目錄 ... VII 表目錄 ... X 第一章 前言 ... 1 1.1 研究動機與目的 ... 1 1.2 研究方法與構想 ... 1 1.3 文獻回顧 ... 2 1.4 論文架構 ... 4 第二章 數值高程模型製作 ... 5 2.1 空載光達系統原理與過濾 ... 5 2.1.1 系統原理概述 ... 5 2.1.2 多重回訊特性 ... 6 2.1.3 TerraScan 過濾原理 ... 7 2.2 航空攝影測量原理 ... 8 2.2.1 內外方位 ... 8 2.2.2 立體攝影測量原理 ... 10 2.2.3 核幾何原理 ... 122.2.4 影像匹配 ... 14 第三章 大安溪蘭勢大橋附近河段實例 ... 16 3.1 研究數據 ... 16 3.1.1 研究範圍 ... 16 3.1.2 數據介紹 ... 16 3.1.3 理論精度 ... 18 3.2 空載光達 ... 21 3.2.1 點雲分類流程 ... 21 3.2.2 自動過濾地面點與人工編修 ... 23 3.3 攝影測量 ... 27 3.4 空載光達與攝影測量穿透率探討 ... 29 第四章 誤差分析 ... 37 4.1 模型邊緣錯誤檢核 ... 37 4.2 輻射畸變差於高程影響 ... 40 4.1.1 輻射畸差影響 ... 40 4.1.2 實驗分析 ... 41 4.3 較差分析 ... 50 4.2.1 明確定義點 ... 50 4.2.2 坡度與較差 ... 52 4.2.3 植被覆蓋與較差 ... 57 第五章 結論 ... 66 參考文獻 ... 68 附錄A 模型邊緣錯誤統計 ... 71
vii
圖目錄
圖 1-1、研究流程圖 ... 2 圖 2-1、光達系統原理示意圖(RENSLOW,2001) ... 6 圖 2-2、樹林區多重回訊示意圖(陳大科等,2007) ... 7 圖 2-3、三角網內搜尋地面點方法(AXELSSON,2000)... 8 圖 2-4、透鏡畸變差示意圖 ... 10圖 2-5、立體像求解地面三維坐標之幾何關係(WOLF AND DEWITT,2000) ... 11
圖 2-6、核幾何結構示意圖(KEATING ET AL.,1975) ... 13 圖 2-7、決定核線示意圖(KEATING ET AL.,1975) ... 14 圖 2-8、平均標準化互相關公式示意圖(修改自 COLWELL,1983) ... 15 圖 3-1、大安溪研究區 ... 16 圖 3-2、航照分佈圖 ... 18 圖 3-3、高程精度推導示意圖 ... 19 圖 3-4、平坦區不合理點雲未濾除示意圖 ... 21 圖 3-5、光達產製 DSM 及 DEM 流程圖 ... 22 圖 3-6、分別過濾平地與山區示意圖 ... 23 圖 3-7、自動過濾後易錯誤的區域-山頭 ... 24 圖 3-8、自動過濾後易錯誤的區域-堤防 ... 24 圖 3-9、自動過濾後易錯誤的區域-植被覆蓋 ... 25 圖 3-10、蘭勢大橋遮蔽導致點雲資訊不足示意圖 ... 25 圖 3-11、植被覆蓋導致點雲訊不足示意圖 ... 26
圖 3-12、ORTHOENGINE自動匹配產製DSM 流程圖 ... 27
圖 3-13、全區正射影像 ... 28
圖 3-15、取樣剖面分佈圖 ... 30 圖 3-16、CASE1 之剖面圖 ... 31 圖 3-17、CASE2 之剖面圖 ... 32 圖 3-18、CASE1 取樣區 1 之放大圖 ... 33 圖 3-19、CASE1 取樣區 1 之含地面點網格套疊正射影像 ... 34 圖 3-20、CASE1 取樣區 2 之放大圖 ... 34 圖 3-21、CASE1 取樣區 2 之含地面點網格套疊正射影像 ... 35 圖 3-22、CASE2 取樣區之放大圖 ... 35 圖 3-23、CASE2 取樣區之含地面點網格套疊正射影像 ... 36 圖 4-1、OE_835_836 較差分層設色圖與剖面圖 ... 38 圖 4-2、OE_839_840 較差分層設色圖與剖面圖 ... 38 圖 4-3、OE_839_840 之彩色暈渲圖 ... 39 圖 4-4、輻射畸變差影響量測高程示意圖 ... 40 圖 4-5、ZEISS RMKTOP15 輻射畸變差折線圖 ... 41 圖 4-6、ROLLEI AIC 輻射畸變差折線圖 ... 41 圖 4-7、輻射畸變差實驗之流程圖 ... 42 圖 4-8、透鏡輻射畸變差影響之實驗樣本區 ... 42 圖 4-9、輻射畸變差改正前後之 DSM 較差分佈圖-OE_835_836 ... 43 圖 4-10、輻射畸變差改正前後之 DSM 較差分佈圖-OE_839_840 ... 43 圖 4-11、輻射畸變差改正前後之 DSM 較差分佈圖-OE_859_860 ... 43 圖 4-12、剖面分佈與剖面圖-OE_835_836 ... 44 圖 4-13、剖面分佈與剖面圖-OE_839_840 ... 45 圖 4-14、剖面分佈與剖面圖-OE_859_860 ... 45 圖 4-15、OE_859_860 之 L2L2’剖面中心區域放大圖 ... 46 圖 4-16、立體像對之左像與右像重疊區示意圖 ... 47
ix 圖 4-18、右像之輻射畸變差折線圖 ... 47 圖 4-19、立體像對示意圖 ... 48 圖 4-20、立體像對之輻射畸變差折線圖 ... 48 圖 4-21、搜尋樣本示意圖 ... 51 圖 4-22、明確定義點取樣分佈圖 ... 51 圖 4-23、明確定義點攝影測量對光達較差直方圖 ... 52 圖 4-24、坡度與高程誤差實驗區 ... 53 圖 4-25、坡度與高程誤差實驗區整體較差直方圖 ... 54 圖 4-26、高程誤差受坡度影響之折線圖(1∘間隔) ... 55 圖 4-27、高程誤差受坡度影響之折線圖(5∘間隔) ... 56 圖 4-28、高程誤差受坡度影響之折線圖(10∘間隔) ... 56 圖 4-29、高程誤差受坡度影響之折線圖(15∘間隔) ... 56 圖 4-30、人工林編修示意圖 ... 58 圖 4-31、自然林修正平均樹高示意圖 ... 58 圖 4-32、自然林內插近似地面點示意圖 ... 59 圖 4-33、人工林實驗區 ... 59 圖 4-34、攝影測量成果編修前後剖面比較-CASE1 ... 60 圖 4-35、攝影測量成果編修前後剖面比較-CASE2 ... 61 圖 4-36、編修後攝影測量與光達成果比較剖面圖-CASE1 ... 62 圖 4-37、編修後攝影測量與光達成果比較剖面圖-CASE2 ... 62 圖 4-38、取樣剖面分佈圖 ... 63 圖 4-39、攝影測量植被覆蓋區 DEM 之高程誤差受坡度影響折線圖(10∘間隔) ... 65
表目錄
表 3-1、空載光達掃描參數表 ... 17 表 3-2、ROLLEI AIC 拍攝參數表 ... 17 表 3-3、高程精度評估 ... 20 表 3-4、自動過濾使用的參數 ... 23 表 3-5、光達點雲分類成果統計表 ... 26 表 3-6、穿透率統計表 ... 36 表 4-1、DSM 模型邊緣之平均剔除範圍 ... 40 表 4-2、ROLLEI AIC 輻射畸變差參數與最大輻射畸變差 ... 41 表 4-3、進行輻射畸變差改正之高程改正量統計表 ... 49 表 4-4、未進行輻射畸變差改正之高程誤差統計 ... 50 表 4-5、進行輻射畸變差改正之高程誤差統計 ... 50 表 4-6、明確定義點攝影測量與光達較差統計表 ... 52 表 4-7、坡度與高程誤差實驗區整體較差統計表 ... 54 表 4-8、攝影測量 DEM 於裸露地實驗區之 10∘坡度間隔高程較差統計表 ... 57 表 4-9、人工林實驗區之平均樹高 ... 60 表 4-10、人工林高程較差統計表 ... 62 表 4-11、自然林高程較差統計表 ... 64 表 4-12、攝影測量植被覆蓋區 DEM 之 10∘坡度間隔高程較差統計表 ... 64 表 A-1、DSM 模型左側邊緣之剔除範圍 ... 71 表 A-2、DSM 模型右側邊緣之剔除範圍 ... 72 表 A-3、DSM 模型上側邊緣之剔除範圍 ... 73 表 A-4、DSM 模型上側邊緣之剔除範圍 ... 741
第一章
前言
1.1 研究動機與目的
數值高程模型(DEM)的應用廣泛,橫跨水文學、地形學與生物學等領域,包括集 水區分區、萃取水系網路、視域分析、地貌特徵、山崩淺勢分析與預估等應用(Gao, 1997)。 上述應用皆以DEM 為基本資料,故 DEM 品質會影響最終分析之結果。 DEM 的產製技術,由傳統的地面測量、等高線數化內插、航空攝影測量人工量測, 發展至數位化之航空攝影測量數值影像自動匹配、干涉合成孔徑雷達及空載光達,大幅 提升產製的速率。其中空載光達可快速提供大量點雲,為當代高程模型製作之一項重要 作業方式。著眼於同時提供正射影像產品,目前空載光達皆配置中像幅航空數位相機同 步作業。這些數位航空影像之攝取目的雖非為DEM 之製作,但是仍具有此一潛力。相 較於空載光達,數位航空攝影測量設備成本較低且平面精度較高,獲取高程模型快速, 並且其高重疊率之特色,已改善傳統航空攝影測量之高程遮蔽問題(陳英煥,2007)。 本研究以大安溪蘭勢大橋附近河道測量為例,以伴隨空載光達所獲得之中像幅數位航空 影像,採用自動匹配方式製作高程模型,探討產製之DEM 品質。1.2 研究方法與構想
本研究分為兩大部份,高程模型產製與高程精度分析。高程模型產製包括:(1)攝 影測量自動匹配。(2)空載光達。分別產製 DEM 與 DSM,並以空載光達成果為檢核資 料,評估高程模型品質。 高程精度分析包括:(1)探討數值攝影測量與空載光達之穿透率。(2)探討透鏡輻 射畸變差對高程誤差之影響。(3)評估以 OrthoEngine 自動匹配產製 DEM 之高程誤差, 分別討論明確定義點、受坡度與植被覆蓋影響之高程誤差。研究流程圖如圖1-1。圖 1- 1、研究流程圖
1.3 文獻回顧
Petrie & Walker(2007)依據像幅尺寸將相機分為三種類別:小像幅相機(最大到 16 megapixels)、中像幅相機(由16至50 megapixels)與大像幅相機(大於50 megapixels)。 類比式量測相機已行之多年,近年來各種數位量測相機也漸漸使用在攝影測量技術應用,
而關於數位量測相機產製DEM之精度品質,Höhle(2009)採用大像幅數位量測相機 UltraCamD作業,以Z/I Imaging ImageStation@Automatic Elevations自動匹配產製DEM,
在像比例尺為1:6530,平均航高為662公尺,其高程之標準偏差可達13公分(或0.2‰的 航高),RMSE可達14公分(或0.22‰的航高)。另外,Höhle(2009)也比較以大像幅 底片式量測相機Zeiss RMK-TOP,獲取不同航高之像片,像比例尺在1:3000與1:25000 之間,其高程之標準偏差可達航高的0.11‰,RMSE可達航高的0.19‰。由研究顯示, Höhle(2009)認為底片式與數位式之大像幅量測相機,所獲得之成果並無顯著差異。
均方根誤差(Root Mean Square Error, RMSE)為廣泛使用描述誤差程度之統計指標, 在DEM 的品質研究上,已有很多相關之探討與分析。
Walker(2006)以全測站地形測量為檢核資料,評估兩種不同產製數值高程模型方 法之成果。一種為澳洲政府公佈之地形圖,由等高線內插為DEM,另一種為攝影測量
3 自動匹配獲得DSM,並以高斯濾波器過濾成 DEM。主要以均方根誤差、標準偏差及相 關長度等統計指標,分別評估不同解析度高程與坡度之精度。 Gao(1997)以數值等高線內插成規則網格,探討不同解析度、地形複雜度與高程 精度(RMSE)影響,以及不同解析度之坡度表現。研究發現高程精度與空間解析度、 地形複雜度間存在明顯之正相關,並以RMSE 與等高線密度之比值,與空間解析度建立 回歸方程式,提出描述高程RMSE 之方程式。 賴子銘及史天元(2006)以攝影測量獲得之 DEM 為檢核資料,比對合成孔徑干涉 雷達技術所產製的SRTM 及 TOPSAR 產品,分析兩組數據之系統誤差、高程精度及粗 差。其中高程精度分析使用平均誤差、平均絕對誤差、標準偏差及RMSE 四種統計指標。 曾義星(2007)提出適合台灣高地表起伏及高植被覆蓋之 DEM 測製規範,核心概 念為DEM 品質受坡度與植被覆蓋程度愈高,其高程精度愈差。提出高程精度公式如下: σ a b c t ··· (1) a:立體模型內對明確定義的點,其高程中誤差 b:受地形坡度影響的高程中誤差 c:植被覆蓋密度參數 k:植被覆蓋平均高度 單純以統計指標方式檢核高程誤差,不易了解區域性誤差分佈及某些穩含之系統誤 差。故賴進貴(2003)提出以視覺化與數理統計偵測誤差,視覺化分析了解整體資料品 質狀況,如暈渲圖、彩色暈渲圖、等高線圖及立體地形圖。數理統計是以地形計測方式, 以絕對高程、坡度、坡向與水系網路來檢視DEM 資料品質之合理性。石宏揚與史天元 (1997)也以 DEM 計算的坡度、坡向、等高線及其它影像處理方式,來檢視八掌溪流 域農委會40 公尺網格式 DEM 可能存在之誤差。
1.4 論文架構
本文共分為五章節,各章節主題說明如下: 第一章:敘述本研究之研究動機與目的、研究方法與構想及本文章之組織與架構。 第二章:敘述產製數值高程模型技術原理,包括空載光達與航空攝影測量。 第三章:說明以大安溪蘭勢大橋附近河道測量為例,產製空載光達與攝影測量DEM 與 DSM 之作業流程,並且探討空載光達與攝影測量之穿透率。 第四章:檢核DSM 模型之合理性,剔除模型邊緣匹配失敗區域。探討受透鏡輻射畸變 差與高程誤差的影響,以及評估自動匹配產製之DEM 品質,分別討論明確定 義點、坡度與植被覆蓋之誤差分析。 第五章:綜觀整體實驗結果與分析。5
第二章
數值高程模型製作
2.1 空載光達系統原理與過濾
2.1.1 系統原理概述
空載光達(Light Detecting And Ranging, LIDAR)為一主動式雷射掃描測距系統, 可於短時間獲得大範圍、高密度之地表三維空間坐標資訊,為現代產製數值高程模型
(DEM)或數值地表模型(DSM)之重要技術。空載光達發展起源可追溯至 1970 及 1980 年代美國太空總署的研發。隨著全球定位系統(Global Positioning System, GPS)及慣性 導航系統(Inertial Navigation System, INS)發展,提供飛機載具瞬間之定位與定姿態, 經由德國Stuttgart 大學於 1988 年至 1993 年期間將雷射掃描儀、GPS 及 INS 加以結合產 生初始的空載雷射掃描系統(Ackermann, 1999)。 空載光達為整合雷射掃描系統、全球定位系統及慣性導航系統三項子系統之整合性 技術,將三項子系統安置於飛機或直昇機。雷射掃描儀由空中向地面發射一高頻率雷射 光束,由感測器接收反射地表之訊號,測量發射脈衝至地表面反射回感測器之時間差, 可計算光達至地面反射點間之距離。並以載具上之GPS 接收儀及待測區之地面 GPS 接 收儀,實施動態差分GPS 定位,配合 INS 獲取載具姿態參數,將二者整合求解載具相 對於地面空間位置與姿態(陳威誠,2004)。最終建立空載光達至地面反射點之空間幾 何關係,將記錄之距離、定位、姿態等參數求解出WGS84 坐標系統下之點位坐標,再 進一步轉換到測區當地所需之投影坐標系統,獲得大量且高密集度之三維坐標離散點, 一般稱為點雲(Point Cloud)。其光達系統施作示意圖如圖 2-1。一般實施地形測量用途 之空載光達,其雷射波段多落在近紅外光範圍,亦有採用綠光波段之光達系統,因綠光 波段有較佳之水體穿透性,稱為測深光達。
圖 2- 1、光達系統原理示意圖(Renslow, 2001) 2.1.2 多重回訊特性 空載光達向地面發射雷射光束,會因發散而形成圓錐狀,當抵達地表時會形成直徑 約數十公分到數公尺的圓形光照區域,此區域稱為足跡(footprint)(黃清美,2007)。 而當地表受測物體小於雷射光束足跡,無法完全阻擋雷射光束,雷射光束會繼續前進直 到另一受測物體足以抵擋為止,此為光達多重回訊(Multiple Echoes)特性。圖 2-2 為 多重回訊示意圖,當雷射光束未受阻礙接觸第一待測物後完全反射,此訊號稱為唯一回 訊(Only echo)。雷射光束接觸樹林地時會有多重回訊情況發生,當雷射光束接觸樹冠 表層反射第一次訊號,稱為第一回訊(First of many echoes),樹冠表層無法完全阻擋雷 射光束前進,途中會受樹葉、樹幹或樹底地表反射多次訊號,其最後一次反射之訊號為
最後回訊(Last of many echoes)。一雷射光束可能為唯一回訊或多重回訊,每個回訊皆 為具有三維資訊之離散點雲,可應用多重回訊特性,測量樹林區數值高程模型,或者進
7
圖 2- 2、樹林區多重回訊示意圖(陳大科等,2007)
2.1.3 TerraScan 過濾原理
光達點雲濾除非地面點之方法,依照其數學模型大致可分為四大類:型態學過
濾法(Morphological Filters)、線性推估法(Linear Prediction)、曲面近似法(Surface Approximation)及影像處理法(General Digital Image Processing)(Lohmann et al., 2000)。本研究使用 TerraScan(Terrasolid, 2004)將光達點雲自動過濾分離地面點 與非地面點,其演算法主要以Axelsson(2000)所提出之曲面近似法為核心。
曲面近似法為採用漸進方式搜尋符合地表條件之地面點,首先依據區域內最大
建築物定義格網大小,搜尋格網內較低點做為原始種子點,運用此法挑選種子點,
可以避免選取建築物頂面點。利用原始種子點組成較稀疏之不規則三角網
(Triangulated Irregular Networks, TIN),在所形成的三角網內搜尋符合門檻之地面 點,將新增地面點加入組成較緻密的三角網。其門檻值為點到三角平面的距離(d) 及點到三頂點之夾角(α、β、γ),如圖 2-3。然後反覆迭代計算使三角網緻密化, 每次迭代之門檻值皆需重新計算,其新門檻值是由該次迭代加入三角網之所有地面
圖 2- 3、三角網內搜尋地面點方法(Axelsson, 2000)
2.2 航空攝影測量原理
2.2.1 內外方位
攝影測量作業時,拍攝瞬間的投影中心與像片在地面坐標系統之位置與姿態,稱作
內外方位元素,分別介紹如下(Wolf and Dewitt, 2000): (1) 內方位 內方位元素(Interior Orientation)為恢復拍攝瞬間投影中心與像片間相對關 係之參數。其元素包含像主點在像片坐標系統之坐標x 、y ,及相機率定焦距 f。 另外,何維信(2006)提及廣義之內方位元素,除了上述三個參數外,尚包含透 鏡畸變差改正量 x、 y。 (2) 外方位 外方位元素(Exterior Orientation)為恢復拍攝瞬間像片在地面坐標系統之位 置與方位姿態。其元素包含投影中心在地面坐標系統之位置,以及攝影瞬間之姿 態方位旋轉量ω、 、κ。。 (3) 透鏡畸變差 當光線通過透鏡後,受透鏡影響改變光線行走路徑,致使無法投影至正確的 像點位置,此種偏移誤差稱作透鏡畸變差(Lens Distortion)。依變形的方向,通 常分為兩種畸變差:輻射畸變差(Radial Distortion)及離心畸變差(Decentering Distortion)或稱正切畸變差(Tangential Distortion)。以下分別介紹兩種畸變差:
9 1. 輻射畸變差
以像主點為中心,像點位移發生在像主點輻射方向上,因透鏡有輻射對稱的
特性,故又稱對稱輻射畸變差,如圖2-4。在設計與製作相機時,輻射畸變差是 無法避免的,只能減少其影響。通常對攝影測量精度影響較大,其改正方程式如
下(Wolf and Dewitt, 2000):
∆r k r k r k r k r ··· (2) 其中,r x y ,x x x ,y y y 。 ∆r:輻射畸變差改正量 k , k , k , k :對稱輻射畸變差係數 r:由像主點至像點之輻射距離 x,y:受輻射畸變差影響之像點坐標 x, y:改正像主點偏移之像點坐標 x , y :像主點偏移量 得知輻射方向上的偏移量,依幾何關係可以得到水平與垂直方向改正量 ∆x, ∆y , 如下式所述: ∆x ∆ x ··· (3) ∆y ∆ y ··· (4) 2. 離心畸變差 指像平面內,垂直於過像主點輻射線之像點位移,使像平面呈現彎曲,偏移 方向恰與輻射畸變差互相垂直,為一非對稱幾何變形,如圖2-4。離心畸變差沿 某一半徑最大,但在與前者互相垂直之半徑為最小(張汝珍等,1982)。其產生 的原因為鏡片組裝時未能將鏡片的中心與相機的主軸對準,或者製造鏡片時兩面
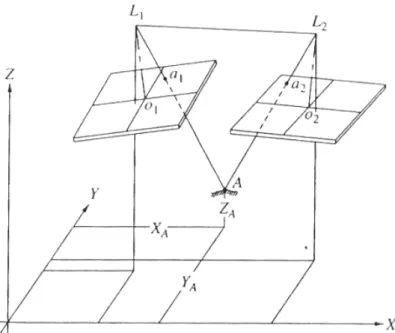
的中心對準之誤差所造成(林修國等,2004)。Brown(1966)提出改正方程式如 下: ∆x p r 2x 2p xy ··· (5) ∆y 2p xy p r 2y ··· (6) p , p :離心畸變差係數 (a)輻射畸變差 (b)離心畸變差 圖 2- 4、透鏡畸變差示意圖 2.2.2 立體攝影測量原理 立體攝影測量(Stereophotogrammetry)為利用重疊航空像片進行攝影測量方法,進 而獲得空間三維坐標資訊之技術。單張像片僅能依共線條件決定待測像點之空間方向, 無法求得相應地面點之空間三維坐標。若在重疊像片找到相應之共軛像點,此共軛像點 之空間方向亦能決定,則該像點之空間三維坐標可由兩像點之空間方向相交獲得。所以, 空間中之三維資訊必需由至少兩張像片重疊聯合求解(何維信,2006),其立體像對求 解地面坐標之幾何關係如圖2-5。
11
圖 2- 5、立體像求解地面三維坐標之幾何關係(Wolf and Dewitt, 2000) 圖2-5 為立體像對求解地面點 A 幾何關係示意圖,兩重疊影像之投影中心分別為L (左像)與L (右像),空間坐標為XL 、YL 、ZL 及XL 、YL 、ZL ,相應之像片坐標分 別為x 、y 及x 、y 。兩重疊影像之投影中心、像點與物點組成共線條件,依共線 式前方交會解算地面點坐標 XA、YA、ZA ,其數學方程式如下: 左像: x x f XA XL YA YL ZA ZL XA XL YA YL ZA ZL ··· (7) y y f XA XL YA YL ZA ZL XA XL YA YL ZA ZL ··· (8) 右像: x x f XA XL YA YL ZA ZL XA XL YA YL ZA ZL ··· (9) y y f XA XL YA YL ZA ZL XA XL YA YL ZA ZL ··· (10) 上式中,f 為相機率定焦距,x 、y 為像主點,m , ~ : ~ 為左像之旋轉矩陣元素。 旋轉矩陣(R)之數學方程式如下:
R m m m m m m m m m ··· (11) m cos cosκ m cos sinκ m sin
m cosωsinκ sinωsin cosκ m cosωcosκ sinωsin sinκ m sinωcos
m sinωsinκ cosωsin cosκ m sinωcosκ cosωsin sinκ m cosωcos 上式中,左像片方位旋轉量為ω、 、κ。當右像片方位旋轉量ω 、 、κ 替換上式之 ω、 、κ,即可獲得m , ~ : ~ 。 2.2.3 核幾何原理 核幾何(Epipolar Geometry)為攝影測量自動匹配之重要技術,簡化了影像相關作 業,因為影像共軛點必然出現在共軛核線上,由原本XY 方向搜尋共軛像點,單純化至 X 方向之一維搜尋,可大幅降低計算負荷量。圖 2-6 為核幾何結構示意圖,兩投影中心 (CL、CR)之連線稱為核軸(Epipolar Axis)。由左右像之投影中心、像點及物點共線之 直線(CL-p-P、CR-p’-P’),及核軸組成核面(Epipolar Plane)。由核面與兩張影像相交之 線段,稱為核線(Epipolar Line)。
13 圖 2- 6、核幾何結構示意圖(Keating et al., 1975) 運用共線式原理可決定兩張像片之共軛核線位置,如圖2-7。當已知左右影像之內 外方位,求取核線位置之流程如下(Keating et al., 1975): (1) 已知左影像目標點 a 之影像坐標,假設高程z ,由共線式求解A 之空間坐標 XA 、YA(兩個共線方程式,解兩個未知數)。再假設高程Z ,由共線式求解A 之 空間坐標XA 、YA 。
(2) 已知A 之空間坐標XA 、YA ,由共線式可反求解右影像之影像坐標a 。再依上述 步驟,由空間坐標XA 、YA ,反求解右影像之影像坐標a 。 (3) 左影像之影像坐標 a,右影像之影像坐標a 、a 連線形成右核線。此核線為核平 面與右影像相交之直線。 (4) 利用右影像之影像坐標a 及假設高程Z ,由共線式求解空間坐標XB、YB。再運 用空間坐標XB、YB及左影像投影中心之空間坐標,由共線式反求左影像之相應之 影像坐標b。左核線即為影像坐標 a、b 連線。
圖 2- 7、決定核線示意圖(Keating et al., 1975) 沿核線方向之像點移動,即為空間高程變化。將原始影像轉換至核坐標系統,重新 取樣後即稱為核影像,影像轉換後Y 視差會消除,地形高程起伏將會顯示在核線的位置 差異上。故可由兩張核影像之X 視差差值,推算出高程差(呂仲浚,1996)。 2.2.4 影像匹配 傳統類比製圖儀與解析製圖儀之基本重要工作,為利用人工立體觀測於像片重疊區 搜尋左右影像之共軛像點。現代自動化數位攝影測量工作站(Digital Photogrammetric Workstation)不以人眼搜尋共軛像點,而利用數位影像灰度值之相關特性,以數學演算 法決定左右影像重疊區之共軛像點,此種影像相關之技術稱為數位影像匹配(Digital Image Matching)。
數位影像匹配技術可分為特徵匹配(Feature Based Matching)、區域匹配(Area Based Matching)及混和匹配(Hybrid Matching)三種(Wolf and Dewitt, 2000)。區域匹配概 念是以移動視窗方式針對影像灰度值進行共軛像點搜尋,於參考影像中待匹配像點之週
15
即為共軛像點;特徵匹配則是使用影像特徵演算法萃取點、線、面特徵,針對特徵之幾
何屬性加以描述,最後以特徵描述之屬性進行相似性評估,進而獲得共軛像點(李政道,
1999)。而混和匹配則是結合上述兩種方法,混合匹配首先強調左右影像中之特徵,再 使用區域匹配決定共軛像點(Wolf and Dewitt, 2000)。
本研究產製數值高程模型之軟體為OrthoEngine(PCI, 2008),其匹配方法為區域匹 配,一般區域匹配方法有標準化互相關法(Normalized Cross Correlation, NCC)、最小灰 度值差法(Minimum Absolute Difference, MAD)及最小二乘匹配法(Least Squares Matching, LSM)。Hijazi(2002)提及 OrthoEngine 為使用平均標準化互相關法(Mean Normalized Cross Correlation),此相關係數介於 0 與 1 之間,0 代表不相似,1 代表完美 匹配。其平均標準互相關公式如(12)(Colwell, 1983): R N, M ∑ ∑ , N ,M M N ∑N ∑M , ∑N ∑M N ,M ··· (12) 其中,N、M 為搜尋視窗之行列坐標,N 、M 為目標視窗之行列坐標(目標視窗大小), p、s 為目標視窗與搜尋視窗各像元灰度值,p、s為目標視窗與搜尋視窗之總像元灰度平 均值。圖2-8 為匹配之示意。 圖 2- 8、平均標準化互相關公式示意圖(修改自 Colwell, 1983)
第三章
大安溪蘭勢大橋附近河段實例
3.1 研究數據
3.1.1 研究範圍 本研究實驗區為大安溪蘭勢大橋附近的河段。大安溪流域位於台灣中部,分佈於苗 栗縣南部及台中縣北部,發源於雪山山脈之大霸尖山西側。實驗區東側(大安溪上游) 地勢較陡峭,愈往西側地勢逐漸平坦。測區內主要為河道地形,亦有部份山區,總長約 10 公里,總面積約為 8.7 平方公里,實驗區位置如圖 3-1 所示。 圖 3- 1、大安溪研究區 3.1.2 數據介紹 本研究使用之空載光達數據與數位航空影像為採用Leica ALS50 空載雷射掃描系統, 並配置4k 5k彩色數位量測相機(Rollei AIC),沿大安溪河道飛行施測,於民國九十七17 年六月十日作業完成,相關掃描參數如表3-1。 表 3- 1、空載光達掃描參數表 航高 約1600 m 地面高 約1209 m 航速 約222.24 km/hr 雷射掃描頻率 65200 Hz 掃描角 39.4∘ 雷射掃描鏡旋轉頻率 25.0 Hz 航帶寬 約909 m 平均點雲密度 1.377 points/m 空載光達配置彩色數位量測相機Rollei AIC 同步作業,共拍攝 28 幅數位航空照片, 每張影像大小為65MB,影像格式為 TIFF,其相關相機參數如表 3-2。圖幅編號由 970610_00835 至 970610_00862,像片前後重疊率平均為 68%,各航照分佈示意圖如圖 3-2,紅色區域為空載光達數據範圍,黃色方框為 Rollei AIC 拍攝範圍。 表 3- 2、Rollei AIC 拍攝參數表 CCD-chip 4080 5440 pixels 影像尺寸 36.72mm 48.96mm 率定焦距 51.780 mm 像片比例尺 約1/23350 率定像主點 Xp 0.329 mm 率定像主點 Yp 0.038 mm 解析度 9μm
圖 3- 2、航照分佈圖 3.1.3 理論精度 圖3-3 為攝影軸平行且垂直攝影之立體像對,S1與S2表示兩張影像之攝影中心,基 線長為B(m),相機率定焦距為f(mm),對地平均航高為H(m),匹配精度(Matching Accuracy)為 σ (m),其對應之高程精度為 σ (m)。右像正確像點 I,經前方交會 後獲得物點G。若正確像點 I 受匹配精度影響後之信心區間為I 、I ,則會獲得G 、G 。 本小節以像平面上之匹配精度,利用物空間與像空間之幾何關係,推導高程精度關係 式。 當受到 σ 影響,正確像點 I 會偏移至I ,投影至物空間後有所偏差。作G G 平 行於基線S S ,因G G G與S S G為相似三角形,可獲得下列關係式:
19 B H G G σ σ G G HB ··· (13) 其中,σ 乘上像比例尺可獲得平面精度,如下式: G G σ 像片比例尺 σ H ··· (14) 將式(14)帶入式(13),可推得匹配精度與高程精度相關式: σ σ H HB ··· (15) 圖 3- 3、高程精度推導示意圖 由式(15)可知,平面精度與高程精度之比值跟基高比(B/H)成正比。假設匹配 精度σ 為 1 pixel(9µm),率定焦距 f=51.78mm,對地平均航高 H=1209m,各立體像對 之基高比介於0.238~0.210,則高程精度為 0.881m~ 1.000m,各片精度估計如表 3-3。
表 3- 3、高程精度評估 B/H σ (m) OE_835_836 0.225 0.933 OE_836_837 0.217 0.967 OE_837_838 0.210 1.002 OE_838_839 0.204 1.030 OE_839_840 0.206 1.022 OE_840_841 0.212 0.990 OE_841_842 0.216 0.971 OE_842_843 0.215 0.978 OE_843_844 0.213 0.985 OE_844_845 0.214 0.982 OE_845_846 0.216 0.973 OE_846_847 0.215 0.977 OE_847_848 0.214 0.982 OE_848_849 0.214 0.981 OE_849_850 0.216 0.975 OE_850_851 0.218 0.966 OE_851_852 0.219 0.960 OE_852_853 0.216 0.971 OE_853_854 0.210 1.001 OE_854_855 0.211 0.995 OE_855_856 0.220 0.953 OE_856_857 0.224 0.937 OE_857_858 0.216 0.971 OE_858_859 0.218 0.963 OE_859_860 0.231 0.911 OE_860_861 0.238 0.881
21
3.2 空載光達
本研究使用Terrasolid/TerraScan 軟體(Terrasolid, 2004),在 Microstation 軟體環境 下進行光達點雲分類及人工編修,產製數值表面模型(DSM)與數值高程模型(DEM)。 本章節介紹產製數值地形模型的流程,以及產製過程所遭遇的問題。 3.2.1 點雲分類流程 原始光達點雲分類前,需檢查是否存在不合理點雲,包含雲、飛行體及低點等,必 需先行濾除,這些不合理雲點會影響點雲分類成果及人工編修的判斷,甚至造成數值地 形模型的錯誤。如下圖3-4 為例,此區域為平坦地區,因低點未濾除造成模型錯誤。 (a)剖線(橘:地面點;綠:非地面點) (b)未濾除 (c)已濾除 圖 3- 4、平坦區不合理點雲未濾除示意圖 光達點雲分為唯一回訊及多重回訊,多重回訊中之第一回訊及最後回訊較常被使用。 第一回訊多為可穿透地物之頂點坐標;最後回訊多為穿透至地表或最接近地表之坐標。 依據回訊特性,產製DSM 與 DEM 流程圖如圖 3-5,並分別介紹如下:
(1)產製 DSM: DSM 為地球表面可見光無法穿透的最上層表面的數值模型(王蜀嘉等,2003),故 提取唯一回訊及第一回訊為地面覆蓋點,並檢核其中是否存在錯誤點(如電線)後,將 地面覆蓋點內插成規則網格。 (2)產製 DEM DEM 為不含植被與人工建物,自然地表面之數值模型。但以土石構築之人工構造 物,如堤防、土塹、水壩、大型溝渠、水道及挖填之道路等大型結構物,亦屬DEM 範 疇(王蜀嘉等,2003)。依據定義,提取唯一回訊及最後回訊,並從中過濾地面點及非 地面點,利用地面點內插成規則網格。 圖 3- 5、光達產製 DSM 及 DEM 流程圖
23 3.2.2 自動過濾地面點與人工編修 提取唯一回訊及最後回訊以TerraScan 自動過濾地面點,需針對不同地形特性,調 整適合的過濾參數。本研究區上游為陡峭山區,下游則是平坦河床,若採取一致的參數, 會降低濾除正確率,並且提高人工編修工作量,大幅降低工作效率。故研究區分為山區 與平地,如圖3-6,分別以不同參數濾除非地面點,參數的使用參考何心瑜(2006)之 自動過濾建議參數如表3-4。經過自動過濾步驟,並無法獲得完成正確的地面點分類成 果,需加以人工判釋與編修。 圖 3- 6、分別過濾平地與山區示意圖 表 3- 4、自動過濾使用的參數 參數 平地 山區
Max building size (m) 80 30 Terrain angle (degrees) 50 70 Iteration angle (degrees to plane) 4 8
自動過濾出地面點後,以地面點組成不規則三角網模型(TIN)輔助人為判釋,依 地形起伏變化的合理性,找出錯誤處並盡量修正接近真實地表面。人工編修主要修正兩 種錯誤:TypeⅠ錯誤及 TypeⅡ錯誤。TypeⅠ錯誤為地面點過濾後被歸類為非地面點;Type Ⅱ錯誤為非地面點過濾後歸類為地面點。本研究區經自動過濾後錯誤的區域,多發生在 山頭、堤防及植被覆蓋區,分別如圖3-7、圖 3-8 及圖 3-9。 (a)未編修 (b)已編修 左上(233408,2686648)公尺、右下(233597,2686394)公尺 圖 3- 7、自動過濾後易錯誤的區域-山頭 (a)未編修 (b)已編修 左上(229940,2690181)公尺、右下(230408,2689741)公尺 圖 3- 8、自動過濾後易錯誤的區域-堤防
25 (a)未編修 (b)已編修 左上(230514,2689184)公尺、右下(230697,2689018)公尺 圖 3- 9、自動過濾後易錯誤的區域-植被覆蓋 上述為過濾後仍可經由人工編修改正之區域,但有些區域可能因密植被覆蓋導致點 雲資訊過少,或者大型遮蔽物,致使模型出現不連續或不合理地形面,無法利用人工編 修方式修正。在本研究區,由於蘭勢大橋遮蔽,橋面下地面點缺乏,導致模型出現不連 續地形面,如下圖3-10。另外,密植被覆蓋區也常造成雷射光束無法穿透,使地面點資 訊不足以表現地表面,如圖3-11。 (a)TIN (b)正射影像 左上(230990,2688891)公尺、右下(231108,2688783)公尺 (c)剖線(橘:地面點;綠:非地面點) 圖 3- 10、蘭勢大橋遮蔽導致點雲資訊不足示意圖
(a)TIN (b)正射影像 左上(234548,2685998)公尺、右下(234636,2685910)公尺 (c)剖線(橘:地面點;綠:非地面點) 圖 3- 11、植被覆蓋導致點雲訊不足示意圖 完成點雲分類及地面點過濾編修後,再次檢核DSM 與 DEM 的合理性,確保數值 模型接近真實地表狀態。最終DSM 點雲密度為 1.362 points/m ,完成人工編修後,DEM 點雲密度為0.563 points/m ,成果統計值如下表 3-5。 表 3- 5、光達點雲分類成果統計表 DEM DSM 點雲總數 地面點數 地面點密度 地面覆蓋點數 地面覆蓋點密度 11,953,790 3,346,113 0.563 9,281,181 1.362 註:點密度單位為points/m
27
3.3 攝影測量
本研究使用OrthoEngine(PCI, 2008)進行影像自動匹配。OrthoEngine 可以直接載 入外方位參數,亦可以人工選取地面控制點(Ground Control Point, GCP)與連接點(Tie Point, TP)經光束法平差解算外方位參數。OrthoEngine 自動匹配產製 DSM 之流程圖如 圖3-12。
圖 3- 12、OrthoEngine 自動匹配產製 DSM 流程圖
本研究是以直接載入外方位元素作業,當完成投影坐標設定、相機率定參數設定、
載入外方位參數後,建立核影像,然後執行影像匹配動作。OrthoEngine 首先嘗試匹配 解析度較粗糙且地物突顯的特徵,再來嘗試較高解析度,最終以原始影像解析度進行匹
配,此方法可以提高執行速度與減少匹配錯誤率。DEM 細緻度(DEM Detail)即為決 定匹配細緻程度之設定,研究設定為Medium,意味影像匹配達中度細緻度時停止,其 像元取樣間隔(Pixel Sampling Interval)設定為 2 pixel,並將匹配失敗區以內插方式填 加數據及較大錯誤值濾除。匹配完成後即可獲得DSM,最終以 DSM 微分糾正產生正射 影像。 以970610_00835 與 970610_00836 為例,產製而成之 DSM 命名為 OE_835_836,其 餘DSM 命名以此類推。總共有 27 幅 DSM,分別製作各幅正射影像,並以自動鑲嵌產 生全區正射影像,如圖3-13。 圖 3- 13、全區正射影像
29
3.4 空載光達與攝影測量穿透率探討
空載光達與航空攝影測量為測製DEM 之重要技術。空載光達將原始光達點雲分類 地面點與非地面,依據地面點之地形走勢,施以適當人工編修製作;而攝影測量自動匹 配所獲得之DSM,包含自然物與人工建物,需以浮測標依據覆蓋物周圍地面點判斷覆 蓋高度,將覆蓋表面修正至地形面。其中,地面點獲得能力將影響人工判斷,進而影響 最終編修的正確性。故本小節探討空載光達與攝影測量於森林區之穿透率,也就是獲取 地面點之能力。 本研究以剖面檢視分類後光達點雲與攝影測量自動匹配產製之規則網格點,並統計 地面點於剖面中所含比率。採用的統計方法如示意圖(圖3-14),圖中為光達剖面,將 剖面分為2 2公尺網格,若網格中含有地面點,即為含地面點網格。故本研究所定義之 穿透率公式如下: 穿透率(%) 含地面點網格數 總網格數 100% ··· (16) 圖 3- 14、穿透率統計示意圖 研究取兩條寬為2 公尺之剖面做為實驗樣本,其剖面分佈如圖 3-15,Case1 為 E 坐標等於233844 公尺之剖面圖,Case2 為 N 坐標等於 2685827 公尺之剖面圖,分別如 圖3-16 及圖 3-17。(a)Case1(E=233844m)
(b)Case2(N=2685827m) 圖 3- 15、取樣剖面分佈圖
31 (a)空載光達 (b)攝影測量 (c)空載光達與攝影測量套疊 圖 3- 16、Case1 之剖面圖
(a)空載光達
(b)攝影測量
(c)空載光達與攝影測量套疊 圖 3- 17、Case2 之剖面圖
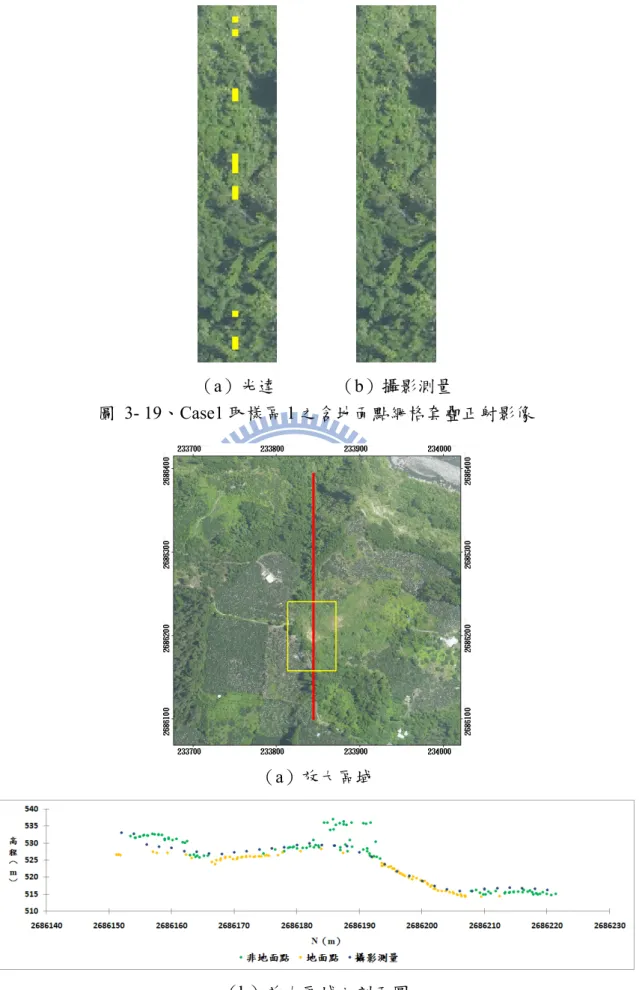
33 由圖3-16 (c)之 Case1 剖面圖右側可發現,其區域放大圖如圖 3-18,攝影測量規則 網格點因大範圍之植被覆蓋,導致無法獲得地面點,均獲得樹頂表面。將含地面點網格 套疊正射影像,如圖3-19,光達成果含地面點網格有 12 個,而攝影測量成果則未含地 面點網格。而在Case1 剖面圖中間區域,其分佈與放大圖如圖 3-20,可由剖面得知攝影 測量成果獲得小區域之地面點,以含地面點網格套疊正射影像呈現,如圖3-21,可清楚 看見攝影測量於裸露區相對於植被覆蓋區之地面點獲取能力較佳。另外,將圖3-17 (c) 之Case2 剖面圖右側放大檢視,其放大圖如圖 3-22,此區域為有間隙之植被覆蓋區。圖 3-23 可發現攝影測量需在間隙夠大之區域才有可能獲得地面點,反觀光達成果,除了空 隙能獲取地面點外,植被覆蓋區也有某種程度之穿透能力。 (a)放大區域 (b)放大區域之剖面圖 圖 3- 18、Case1 取樣區 1 之放大圖
(a)光達 (b)攝影測量
圖 3- 19、Case1 取樣區 1 之含地面點網格套疊正射影像
(a)放大區域
(b)放大區域之剖面圖 圖 3- 20、Case1 取樣區 2 之放大圖
35 (a)光達 (b)攝影測量 圖 3- 21、Case1 取樣區 2 之含地面點網格套疊正射影像 (a)放大區域 (b)放大區域之剖面圖 圖 3- 22、Case2 取樣區之放大圖
(a)光達 (b)攝影測量 圖 3- 23、Case2 取樣區之含地面點網格套疊正射影像 依照本研究所定義的穿透率,統計兩剖面樣本之空載光達與攝影測量所獲之成果, 其統計表如表3-6。統計結果顯示,兩實驗區之穿透率,光達分別為 31.4%及 37.3%,攝 影測量為5.9%及 12.7%,可知兩策略於穿透率上的表現,空載光達較優於攝影測量。 表 3- 6、穿透率統計表 總長 空載光達 攝影測量
實驗區 Case1 Case2 Case1 Case2 Case1 Case2 網格數 188 150 59 56 11 19 穿透率 - - 31.4% 37.3% 5.9% 12.7% 綜觀實驗分析,攝影測量無法在大範圍植被覆蓋區獲得地面點,僅能在裸露地或擁 有較大間隙之植被覆蓋區,才能穿透至地面點。若進行人工編修,大範圍植被覆蓋區將 無法根據地面點評估樹高,增加編修上的困難,致使無法將樹頂表面正確修正至真實地 形面。反觀空載光達,較高的穿透率可提高獲得地面點機率,並且可直接獲得地形面之 三維資訊,於DEM 產製上較攝影測量具備優勢。
37
第四章
誤差分析
本章節探討受輻射畸變差的高程誤差與DEM 高程誤差分析,實驗數據均使用 Point2Grid(Crosby, 2007)將空載光達點雲及攝影測量規則網格點網格化,網格大小為 2x2 公尺,DSM 採搜尋半徑 1.414 公尺之 Max 內插法,DEM 則採搜尋半徑 1.414 公尺 之IDW 內插法。4.1 模型邊緣錯誤檢核
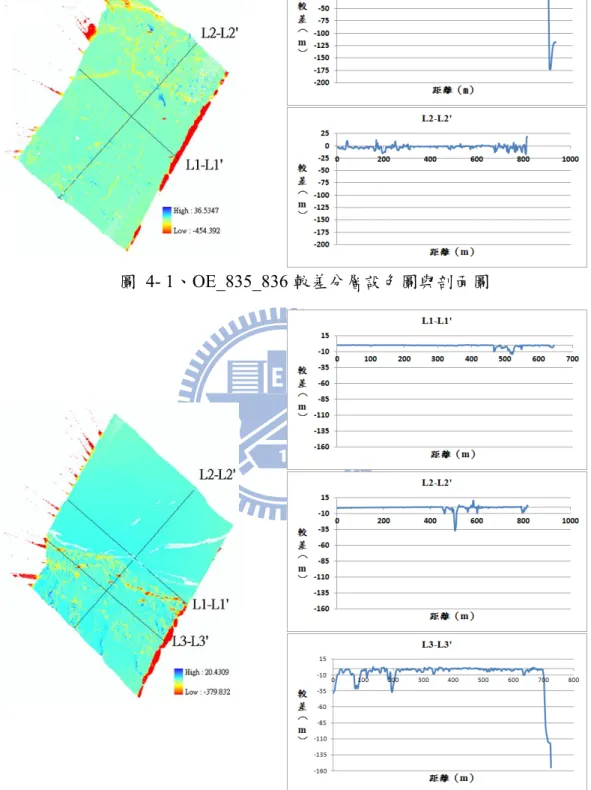
數值攝影測量影像匹配技術產製DSM,模型邊緣區經常發生匹配失敗,致使產生 不合理地形面。吳宗儒(2003)提出可能造成模型邊緣匹配失敗之原因,包含影像色退 差(Geometric falloff)、外方位元素誤差及攝影視角造成影像灰度值差異。故本小節將 檢視各DSM 之合理性,訂定各模型之有效範圍並與以剔除,避免錯誤高程值影響精度 評估成果。 邊緣錯誤值偵測最直接之方式,為採用精度等級較高之DSM 做為檢核資料,依據 較差分佈即可區分有效模型範圍。但本研究之檢核資料空載光達DSM,未完全與攝影 測量DSM 重合,模型上、下邊緣之有效範圍無法由較差分佈圖區分,可由航照與空載 光達施測範圍分佈圖得知,如圖3-2。故本研究將以 DSM 本身之地形合理性,判斷模型 邊緣需與以剔除之範圍。彩色暈渲圖結合分層設色和暈渲的原理,能表現地形之高度與 坡向變化,對於不合理之高程誤差具有良好的展現效果(賴進貴,2003)。故本研究主 要以誤差視覺化分析,檢核模型邊緣錯誤範圍。 雖然無法完全依靠空載光達DSM 檢核邊緣錯誤範圍,但仍可就其重合區域之較差 分佈輔助判斷。實驗取OE_835_836 與 OE_839_840 為例,以分層設色圖及剖面圖檢視 較差分佈,兩組較差圖與所對應之剖面圖分別為圖4-1 與圖 4-2。 檢核兩組較差之分層設色圖與剖面圖,均未有整體性之系統誤差出現。而DSM 模 型兩側邊緣存在區域性的粗差,OE_835_836 最大較差可達-454.392 公尺,而 OE_839_840則為-379.832 公尺,且邊緣之粗差涵蓋範圍並不一致。
圖 4- 1、OE_835_836 較差分層設色圖與剖面圖
圖 4- 2、OE_839_840 較差分層設色圖與剖面圖
由上述之較差分層設色圖可知,模型上下側因未與光達DSM 重合,故無法判斷邊 緣粗差範圍。故本研究以彩色暈渲圖為主,較差分佈圖為輔之方式,檢核並訂定模型之
39 有效範圍。以OE_839_840 之彩色暈渲圖為例,如圖 4-3 所示,圖中可清楚分辨模型邊 緣不合理地形面,採用人工判斷方式訂定模型的有效範圍。 圖 4- 3、OE_839_840 之彩色暈渲圖 各模型邊緣之有效範圍並不一致,必需各自判定與剔除。統計各模型邊緣需剔除之 區域,量取立體像對重疊區邊緣至模型有效區域之距離,以及佔模型寬度或長度之百分 比,如附錄一。由圖4-3 可知,山區邊緣較平坦區邊緣需剔除更大範圍,其它模型亦是 如此,故附錄一也分別表列各模型之山區與平坦區邊緣需剔除之範圍。表4-1 為各模型 於山區及平坦區邊緣之平均剔除範圍,其中模型上側因只有OE_835_836 包含山區,樣 本數過少,故不納入統計。山區邊緣平均剔除範圍為5.97%~9.60%,平坦區為 1.31%~2.52%,山區邊緣明顯有較大錯誤範圍。本研究所使用之攝影測量 DSM,均剔除 模型錯誤邊緣,以免過大的粗差影響最終評估結果。
表 4- 1、DSM 模型邊緣之平均剔除範圍 山區 平坦區 剔除範圍(m) 剔除範圍(%) 剔除範圍(m) 剔除範圍(%) 左側 61.87 9.60% 12.34 1.90% 右側 38.90 5.97% 16.36 2.52% 上側 - - 14.94 1.33% 下側 67.91 6.07% 14.03 1.31%
4.2 輻射畸變差於高程影響
4.1.1 輻射畸差影響現代精密的航空製圖相機,受透鏡畸變差影響的誤差少於5μm(Wolf and Dewitt, 2000)。而本研究採用數位量測相機作業,其相機與鏡頭的設計並無航空製圖相機精密, 輻射畸變差會有較大的影響,造成航空照片的幾何變形,相對也影響產製數值模型之高 程精度。如圖4-4 所示,圖為近似垂直且相同航高的立體像對,左右像相對應的輻射方 向分別為OR與O R ,正確像點坐標為 C 與C 。受正輻射畸變差影響,正確像點於輻射方 向位移至A 與A ;受負輻射畸變差影響,正確像點於輻射方向位移至 B 與B 。由圖中幾 何關係可發現,正輻射畸變差使量測結果高於正確高程值,而負輻射畸變差則會使量測 結果低於正確高程值,像點隨著距離像主點愈遠,差異程度就愈大。 圖 4- 4、輻射畸變差影響量測高程示意圖
41 以國內農林航空測量所採用的底片式航空量測相機Zeiss RMK TOP 15 為例,於 2001 年相機率定報告,輻射畸變差曲線圖如圖 4-5,橫軸為以像主點為原點之輻射半徑, 縱軸為輻射畸變差,由圖可知輻射畸變差最大影響量為 3µm。而本研究採用 Rollei AIC 中像幅數位量測相機,輻射畸變差率定參數k ~k 如表 4-2,像幅為48.960 36.720mm, 故最大輻射距離為30.6mm,由輻射畸變差改正方程式可得輻射畸變差折線圖,如圖 4-6, 其最大輻射畸變差為-0.6375mm。Rollei AIC 之最大輻射畸變差約為 RMK TOP 15 的 200 倍,可知數位量測相機之鏡頭輻射畸變差會造較嚴重的像片幾何變形,進而影響數值高 程模型的產製。 圖 4- 5、Zeiss RMK TOP 15 輻射畸變差折線圖 圖 4- 6、Rollei AIC 輻射畸變差折線圖 表 4- 2、Rollei AIC 輻射畸變差參數與最大輻射畸變差 k k k k 0 3.54 10 1.40 10 0 4.1.2 實驗分析 本章節探討中像幅數位影像,採自動匹配方式製作DSM 受透鏡輻射畸變差之影響。 實驗以OrthoEngine 為產製策略為例,分別產製進行與不進行輻射畸變差改正之 DSM。
實驗分為三部份:(1)檢核輻射畸變差改正前後之較差分佈;(2)評估輻射畸變差改正 後之高程改正量;(3)以光達 DSM 成果為檢核資料,評估輻射畸變差改正前後之高程 誤差。實驗流程圖如圖4-7。 圖 4- 7、輻射畸變差實驗之流程圖 實驗取三組立體像對做為實驗樣本,依地形複雜程度,挑選山區、山區與平坦混合 區及平地區圖幅分別為OE_835_836、OE_839_840 及 OE_859_860,正射影像如圖 4-8。
(a)OE_835_836 (b)OE_839_840 (c)OE_859_860 圖 4- 8、透鏡輻射畸變差影響之實驗樣本區
43 其實驗比較與分析分別如下: (1) 較差分佈 以未改正DSM 減改正 DSM,其三組樣本較差之分層設色圖分別如圖 4-9、 圖4-10 及圖 4-11。除了模型邊緣易匹配錯誤區域有較大起伏的差異,其餘均可 明顯看出較差值以中心點輻射方向愈遠離差異值愈大。 圖 4- 9、輻射畸變差改正前後之 DSM 較差分佈圖-OE_835_836 圖 4- 10、輻射畸變差改正前後之 DSM 較差分佈圖-OE_839_840 圖 4- 11、輻射畸變差改正前後之 DSM 較差分佈圖-OE_859_860
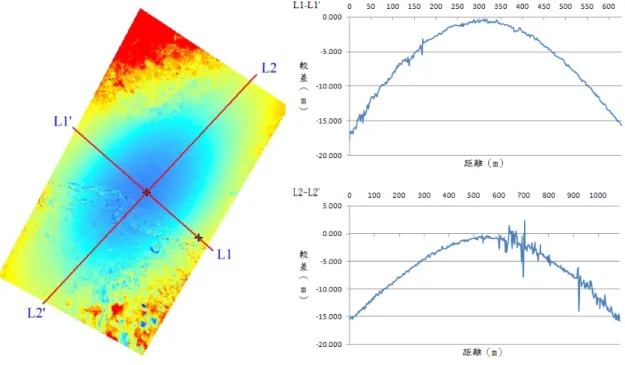
檢視較差剖面觀察輻射畸變差對高程誤差的分佈情況。以通過立體像對像主 點連線與垂直像主點連線畫剖面,分別為L1L1 與 L2L2 ,其三組樣本之剖面分 佈與剖面圖如下圖4-12、圖 4-13 及圖 4-14。由三組樣本之剖面圖及分層設色圖 均可看出較差分佈對稱於中心點,且離中心點愈遠較差愈大。其中OE_859_860 之L2L2’剖線兩側有較大震盪發生,最大較差約為 140 公尺,影響剖面圖垂直軸 比例尺的表現,無法看出較差分佈趨勢,故放大中心區域檢視,如圖4-15,其中 心區域較差分佈也呈現離中心點愈遠較差愈大的趨勢。整體較差分佈, OE_835_836、OE_839_840 及 OE_859_860 分別有 99%、99%及 94%分佈在負值, 代表未加入輻射畸變差改正的整體高程低於正確高程。本研究之數位相機為負輻 射畸變差(如表4-2),由幾何關係推得量測高程會低於正確值,與實驗成果相符。 圖 4- 12、剖面分佈與剖面圖-OE_835_836
45
圖 4- 13、剖面分佈與剖面圖-OE_839_840
圖 4- 15、OE_859_860 之 L2L2’剖面中心區域放大圖 由Rollei AIC 輻射畸變差折線圖可知,如圖 4-6,輻射畸變差改正量分佈對 稱於像主點,且離像主點輻射方向愈遠,輻射畸變差改正量愈大。但由實驗得知, 受輻射畸變差影響之DSM,其誤差影響是來至立體像對之兩張像片,但較差分 佈卻是對稱於模型中心點,也就是立體像對之重疊區中心,而不是像主點。故本 研究進行模擬實驗,以探討較差分佈為何對稱於模型中心。 以本研究之數位量測相機Rollei AIC 為例,假設垂直攝影之立體像對,其像 幅大小為48.960mm 36.720mm,影像重疊率為 70%,DSM 之模型寬度約為 34mm。模擬立體像對未存在 Y 視差的情況下,輻射畸變差改正量於像片 X 方向 上之影響。圖4-16 為立體像對示意圖,紅色方框為重疊區域。當像坐標 y 為 0 時,圖4-17 為左像片像坐標(-9,0)至(25,0)之輻射畸變差折線圖,圖 4-18 為 右像片像坐標(-25,0)至(9,0)之輻射畸變差折線圖。當組成立體像對後,示 意圖如圖4-19,重疊區域寬度約為 34mm,圖 4-20 為重疊區域由左至右之輻射畸 變差折線圖。折線圖對稱於模型中心點17mm 處,且離中心點愈遠畸變差愈大, 此模擬結果與實驗成果相符。本案例之輻射畸變差為同一方向變形,且離像主點 輻射方向愈遠改正量愈大,而立體像對分別受左像與右像之輻射畸變差影響,此 同一方向之畸變差會導致立體像對重疊區域受到加成之輻射畸變差影響,使輻射 畸變差折線對稱於模型中心點。
47 圖 4- 16、立體像對之左像與右像重疊區示意圖 圖 4- 17、左像之輻射畸變差折線圖 圖 4- 18、右像之輻射畸變差折線圖
圖 4- 19、立體像對示意圖 圖 4- 20、立體像對之輻射畸變差折線圖 (2) 高程改正量 本小節比較進行輻射畸變差改正與未改正之DSM 成果,評估進行輻射畸變 差改正後之高程改正量。以未改正DSM 減改正 DSM,其三組樣本之較差統計如 表4-3。進行輻射畸變差改正後,三組樣本之平均改正量分別為-13.4231 公尺、 -11.6316 公尺及-11.0282 公尺。若以改正後 DSM 為參考資料,其未改正之高程 RMSE 分別為 16.3847 公尺、14.3628 公尺及 27.2739 公尺。其中 OE_859_860 之 高程RMSE 明顯較大,由於 DSM 左上角匹配失敗或匹配錯誤高程值導致,可由 圖4-10 之 L2L2’剖面圖可知,匹配失敗或錯誤高程使剖面有高度震盪現象,導致 整體標準偏差達24.9450 公尺,最大較差 213.3737 公尺。
49
表 4- 3、進行輻射畸變差改正之高程改正量統計表
DSM 編號 OE_835_836 OE_839_840 OE_859_860 Total 樣本(個) 128665 164672 147304 440641 平均較差 -13.4231 -11.6316 -11.0282 -11.9530 平均絕對較差 13.5406 11.6418 17.8880 14.2843 最大較差 43.6668 28.1966 213.3737 213.3737 最小較差 -95.9648 -95.8209 -87.9772 -95.9648 標準偏差 9.3957 8.4259 24.9450 16.1641 RMSE 16.3847 14.3628 27.2739 20.1305 (單位:公尺) 將樣本做整體性的統計,進行輻射畸變差改正所獲得的DSM,其平均改正 量為11.95 公尺。故數位量測相機所獲得之影像,若未進行輻射畸變差校正,其 產製之DSM 將不符使用。 (3) 高程誤差 本小節以空載光達DSM 為參考資料,檢核進行輻射畸變差改正與未進行改 正對高程誤差之影響,未進行與進行輻射畸變差改正之高程誤差統計圖分別如表 4-4 與表 4-5。由統計結果顯示,三組樣本之高程 RMSE 均有顯著的提升,尤其 以OE_859_860 由 26.2358 公尺提升至 1.0980 公尺幅度最大。三組實驗區中, OE_859_860 之高程精度表現最佳,可能是實驗區內主要為平坦地形及樹頂平滑 之人工林導致,反觀其它兩組實驗區,可能受山區地勢起伏及較多自然林的影響, 造成高程精度較差。 整體性的樣本統計,未進行輻射畸變差改正之DSM,其標準偏差為 15.6565 公尺,RMSE 為 19.7986 公尺,而已進行輻射畸變差改正之 DSM,其標準偏差為 3.3876 公尺,RMSE 為 3.5595 公尺,高程精度提升約 5 倍,可見輻射畸變差對高 程精度影響極大。
表 4- 4、未進行輻射畸變差改正之高程誤差統計
DSM 編號 OE_835_836 OE_839_840 OE_859_860 Total 樣本(個) 105938 132010 126007 363955 平均較差 -13.8908 -11.0926 -11.7036 -12.1186 平均絕對較差 14.0160 11.1137 17.1073 14.0336 最大較差 28.3196 16.4149 212.6180 212.6180 最小較差 -95.4185 -80.1077 -90.7585 -95.4185 標準偏差 9.8904 8.2038 23.4808 15.6564 RMSE 17.0521 13.7966 26.2358 19.7986 (單位:公尺) 表 4- 5、進行輻射畸變差改正之高程誤差統計
DSM 編號 OE_835_836 OE_839_840 OE_859_860 Total 樣本(個) 105896 132019 128862 366777 平均較差 -2.2473 -1.0884 -0.1483 -1.0927 平均絕對較差 2.8168 1.5791 0.8248 1.6714 最大較差 32.5358 19.7551 9.8672 32.5358 最小較差 -53.0153 -43.7374 -12.2700 -53.0153 標準偏差 4.5990 3.4383 1.0879 3.3876 RMSE 5.1187 3.6065 1.0980 3.5595 (單位:公尺)
4.3 較差分析
4.2.1 明確定義點 本章節探討明確定義高程點之高程誤差。本研究選擇坡度小於5∘的平坦地,且無 植被與人工地物覆蓋的裸露地,做為評估明確定義點高程中誤差的實驗區。依據光達資 料計算坡度,配合正射影像搜尋無地物覆蓋之合適區域,如圖4-21。研究區除河道外, 大多為植被覆蓋,故選擇道路作為取樣實驗區。在研究區裡,依上述條件進行隨機取樣, 盡量以分佈均勻為原則,共取100 樣本數,其樣本分佈如圖 4-22 所示。51 (a)正射影像 (b)坡度圖 圖 4- 21、搜尋樣本示意圖 圖 4- 22、明確定義點取樣分佈圖 實驗區的高程較差直方圖及統計表,分別如圖4-23 及表 4-6,由較差直方圖可得知 OrthoEngine 成果有 97%分佈在-1.25 至 1.25 公尺,較差直方圖大致呈現常態分佈。統計 實驗數據,由明確定義點所得之高程較差RMSE 為 0.5528 公尺。
圖 4- 23、明確定義點攝影測量對光達較差直方圖 表 4- 6、明確定義點攝影測量與光達較差統計表 統計指標 OrthoEngine 平均較差 0.1506 平均絕對較差 0.4151 最大較差 1.8577 最小較差 -1.1975 標準偏差 0.5345 RMSE 0.5528 (單位:公尺) 4.2.2 坡度與較差 本小節探討隨著地形坡度的改變,對高程誤差的影響分析,並且透過不同的坡度間 隔分析,訂定合理的坡度分級,用以評估不同坡度等級之精度。實驗區選擇地勢起伏較 明顯的河道裸露地,面積約為121,300 平方公尺,實驗區之正射影像與光達坡度分佈如 圖4-24,共 25309 個樣本。
53 (a)正射影像 (b)光達坡度圖 圖 4- 24、坡度與高程誤差實驗區 實驗區高程較差直方圖與整體較差統計表,分別如圖4-25 與表 4-7,較差直方圖近 似呈現常態分佈,並且有些微右偏的現象。其中約有86%之較差分佈在 0 至 2 公尺之間, 平均較差為1.2015 公尺,實驗區之攝影測量 DEM 高於光達 DEM。
圖 4- 25、坡度與高程誤差實驗區整體較差直方圖 表 4- 7、坡度與高程誤差實驗區整體較差統計表 統計指標 OrthoEngine 平均較差 1.2015 平均絕對較差 1.2861 最大較差 22.2283 最小較差 -12.4087 標偏偏差 1.6418 RMSE 2.0344 (單位:公尺) 在實驗區內訂定符合本區之坡度分級,過大的坡度取樣間隔,會將細微的誤差變化 吸收,過小的坡度間隔,又會造成樣本數過少,降低統計指標的可靠度。本研究以1∘、 5∘、10∘、15∘為坡度間隔,從中尋找合適的坡度分級。 首先以1∘坡度間隔觀察整體實驗區之高程誤差與坡度的變化。圖 4-26 為高程誤差 與坡度折線圖,橫軸為1 度間隔之坡度,左右垂直軸分別為高程較差及樣本數。由坡度 與RMSE 的相互關係可發現,雖然折線的震盪嚴重,但仍可看出高程 RMSE 隨坡度增 加有逐漸上升的趨勢。實驗區各坡度間隔的樣本數目,從坡度3∘開始隨著坡度的增加
55 而減少,大於坡度40∘之坡度間隔的樣本數甚至少於 100 個,平均約 50 個,最少至 6 個。 圖 4- 26、高程誤差受坡度影響之折線圖(1∘間隔) 將坡度分級加大為5∘、10∘與 15∘,高程誤差與 5∘、10∘、15∘坡度間隔之折 線圖分別如圖4-27、圖 4-28 與圖 4-29 所示,其折線震盪的情形已隨著加大取樣間隔而 改善。由三種坡度間隔的折線圖均可得知,坡度大於40∘高程 RMSE 開始明顯爬升,小 於 40∘趨於平緩。由 5∘坡度間隔的折線圖可知,有兩個分界點高程的 RMSE 明顯開始 變化,分別為坡度 40∘與 70∘。而 15∘坡度間隔於坡度 70∘時卻未有明顯起伏,顯然 因取樣間隔過大,導致誤差被吸收。5∘及 10∘間隔均可有效表現 RMSE 變化,但以樣本 數目的觀點,5∘間隔於坡度 75∘以上,樣本數只有 63 個,反觀 10∘間隔,最少有 287 個樣本,統計的可靠性要來得好。綜合上述分析,本實驗採用 10∘坡度間隔,用以評估 不同坡度等級之精度,其較差統計表如表4-8。由統計表顯示,小於 40∘之平緩區,其 RMSE 在 1.4685~2.0130 公尺之間,而大於 40∘,則由 3.5040 公尺爬升至 7.9421 公尺, 可知坡度分級在0∘~40∘之間,其高程誤差並無顯著差異,反觀大於 40∘,對於高程 誤差有很大的影響。
圖 4- 27、高程誤差受坡度影響之折線圖(5∘間隔) 圖 4- 28、高程誤差受坡度影響之折線圖(10∘間隔) 圖 4- 29、高程誤差受坡度影響之折線圖(15∘間隔)
57 表 4- 8、攝影測量 DEM 於裸露地實驗區之 10∘坡度間隔高程較差統計表 坡度(∘) 0~10 10~20 20~30 30~40 40~50 50~60 60~70 70~80 樣本(個) 14321 5584 2372 1186 716 436 407 287 平均較差 1.0803 1.1366 1.1742 1.2552 1.9118 2.1597 2.2038 3.8648 平均絕對較差 1.1137 1.1547 1.2112 1.4122 2.1433 2.6550 3.0823 5.5719 最大較差 19.9782 18.7430 21.4831 15.7278 19.8165 18.5010 19.3474 22.2283 最小較差 -2.8434 -1.5589 -1.2325 -11.0090 -7.4751 -12.4087 -11.8789 -10.3138 標準偏差 1.1853 0.9298 1.1869 1.5744 2.9385 3.7753 4.2567 6.9504 RMSE 1.6037 1.4685 1.6694 2.0130 3.5040 4.4356 4.7887 7.9421 (單位:公尺) 4.2.3植被覆蓋與較差 本小節探討植被覆蓋區對DEM 高程精度的影響。本研究採自動匹配產製之成果為 DSM,其包含自然物及人工建物之覆蓋表面,必需施以適當之濾除動作。一般採數位立 體工作站自動匹配作業時,需搭配人工編修,以浮測標判斷地物高度,修正至近似地形 面。而本研究濾除DSM 地物之方法是將攝影測量規則網格點視為光達點雲,以剖面之 地形幾何表現,輔以正射影像判斷植物高度,將地物點修正至近似地形面。 將植被覆蓋區依生長型態分為人工林與自然林,分別以不同方法獲得地面高程,假 設受植被遮蔽區域為平滑地形面,編修方法分別如下: (1)人工林 人工林指的是人為栽種、培育而成之植被覆蓋區,樹頂表面平滑,樹高較具一致性, 故採用整體植被覆蓋面修正至地形面之方式施作。如圖4-30 所示,首先以正射影像選 取合適區域,將攝影測量規則網格點分類成地面點及非地面,依地勢起伏選取適當剖面 檢視攝影測量規則網格點,假設受植被遮蔽之近似地形面符合剖面兩端地形之趨勢,人 工量取三段樹高之平均值,代表該區域之樹高。然後將非地面點直接扣除平均樹高,修 正至近似地形面。
圖 4- 30、人工林編修示意圖 (2)自然林 自然林之樹頂表面不同於人工林,有較大的高程差異,若自然林樹頂表面修正一平 均樹高,易造成不合理的地形面,如圖4-31 所示,其平均樹高為 15.1044 公尺。故以植 被覆蓋區外圍裸露地作為參考高程,以線性內差方式計算出受植被遮蔽下之地面點。首 先以正射影像搜尋合適區域,依地勢起伏選取適當剖面檢視攝影測量規則網格點,如圖 4-32,再將剖面兩端地面點 G1、G2 間的近似地形面,以平分四等份方式,內插三個近 似地面點於近似地形面上。 (a)原始剖線 (b)修正後剖線 圖 4- 31、自然林修正平均樹高示意圖
59 圖 4- 32、自然林內插近似地面點示意圖 植被覆蓋區分為人工林與自然林,以不同方法取樣地面點,以下分別敘述取樣之實 驗區與較差統計: (1)人工林 以正射影像搜尋合適之實驗樣本區,分別為Case1 與 Case2,其實驗區面積大小約 為5245.43、7972.68 平方公尺,如圖 4-33 所示。 Case1 Case2 圖 4- 33、人工林實驗區 將兩實驗區之攝影測量規則網格點依據地形走勢與正射影像判斷,分類成地面點及 非地面點,以適當之剖面檢視並測量樹高,其實驗區各別之平均樹高如表4-9。將攝影
測量規則網格點依平均樹高修正至近似地形面,編修成果分別如圖4-34 及圖 4-35,圖 中編修區為待修正之植被頂點,以剖面來檢視編修前後成果,Case1 為 N 坐標等於 2686167 公尺之剖面圖,Case2 為 N 坐標等於 2689365 公尺之剖面圖,經編修後之編修 區,大致上符合近似地形面。 表 4- 9、人工林實驗區之平均樹高 實驗區 Case1 Case2 平均樹高(公尺) 1.9401 1.8735 (a)原始剖面 (b)編修後剖面 圖 4- 34、攝影測量成果編修前後剖面比較-Case1