國 立 交 通 大 學
光電工程研究所
碩 士 論 文
利用同步多曲面方法設計側光式方向性背光模組
Directional Side-lit Configuration via SMS Method
研究生 : 林至宏
指導教授 : 田仲豪 博士
i
利用同步多曲面方法設計側光式方向性背光模組
學生 : 林至宏 指導教授 : 田仲豪 博士 國立交通大學光電工程研究所碩士班 摘要 近年來由於環保意識抬頭,綠色環境(Green Environment)已被各個產業視為 永續發展的重要議題,一般來說,基於 Eco-Display 對於背光模組的訴求,除了 可使用 LED 做為背光模組的光源外,亦能藉由調控背光模組的出光角度,來增加 面板出光後的利用率,而要做到控制背光的出光角度,通常會採用雙光源系統的 方式,或是利用雙層液晶的結構來達到目的,但這些方式容易造成背光模組的光 機架構繁複,故光源出光效率無法有效提升! 因此,本研究主要目的是基於側光式背光模組的機構,透過一層導光板的設 計,配合上非成像曲面的設計方法,使得 LED 出光至導光板時能有效控制在特定 角度內,進而達成方向性背光的目的!ii
Directional Side-lit Configuration via SMS Method
Student : Zhi-Hong Lin Advisor : Dr. Chung-Hao Tien
Department of Photonics
National Chiao Tung University
ABSTRACT
Recently, green technologies have been taken as an important issue for the sustainable development due to environmental consciousness. In general, to fit the requirements of Eco-Display in terms of backlight modules, we use the LED as the source of backlight and modulate the viewing angles to increase the efficiency of outgoing rays from backlight. Conventional viewing angle modulation can be achieved by two ways, including a dual light source system and a dual liquid crystal layers design. But multiple optical structures make them face some problems about energy saving.
In this study, we take advantage of conventional side-it configuration, which enables viewing angle modulation by the design of simultaneous multiple surface lens and a light guide plate. The proposed mechanism would confine the viewing angles of backlight module to get the purpose of directional backlight.
iii
致謝
在完成論文的同時,首先我要感謝田仲豪老師的諄諄教誨,不論是在研究學 習、做人處事乃至於生涯規劃上,老師的意見惠我良多,使我能順利在碩士修業 的期間完成自由形曲面應用的相關研究。 而在實驗室的日子裡,感謝簡銘進學長對我研究上的多方指導和建議,使論 文內容臻於完善,同時,也感謝實驗室的鄭璧如學姐、洪健翔學長、陸彥行學長、 藍子翔學長和江松柏學長提供的寶貴建議,使我研究的過程更加順遂,其次,感 謝陳筱儒、李家豪、何展燁、蔡玉麟以及鍾岳和鍾議寬同學,有你們的加油打氣, 讓我對研究的信心得以提升,還有,感謝古明嬿小姐、鄭榮安學長和其他學弟妹 們,謝謝你們在生活中提供的支持和協助,豐富了我在研究生的這段日子。 此外,感謝陳皇銘教授、趙昌博教授和李企桓教授對我論文提出的相關建 議,讓研究的內容能更加充實、完備。 最後,我要感謝我的父母和哥哥,在求學的日子,有了你們在背後默默支持 和鼓勵,才使我能在面對挫折時還能勇往直前,歡欣雀躍時還有分享對象,投入 研究時能無後顧之憂,對你們的感恩將永存於心,謝謝!iv
目錄
摘要 (Chinese)……….i Abstract (English)………ii 致謝………iii 目錄………iv 圖表目錄……….vi 第一章 緒論 ... 1 1.1 非成像曲面的發展 ... 2 1.2 方向性背光的發展 ... 4 1.3 研究動機 ... 6 1.4 論文架構 ... 8 第二章 基本理論 ... 10 2.1 不變量(Etendue)... 10 2.2 Hermite interpolation ... 152.3 同步多曲面(Simultaneous Multiple Surface) ... 16
2.4 複合式拋物面收光器(Compound Parabolic Concentrator) ... 21
2.5 RR、RX、XR、XX、RXI 光學系統 ... 24 第三章 準直背光光源設計 ... 27 3.1 同步多曲面演算流程推導 ... 27 3.2 LighttoolsTM模擬驗證 ... 31 3.2.1 成像系統測試 ... 31 3.2.2 非成像系統測試 ... 33
v 3.2.3 逆介質系統測試 ... 37 3.3 二次光學架構特性分析 ... 40 3.3.1 透鏡架構的非成像系統 ... 40 3.3.2 逆介質透鏡架構的非成像系統 ... 43 第四章 方向性背光模組 ... 47 4.1 方向性背光原理 ... 47 4.2 模擬驗證與分析 ... 50 第五章 結論與未來工作 ... 56 5.1 工作回顧 ... 56 5.2 結論 ... 56 5.3 未來工作 ... 57 參考資料………..58
vi
圖表目錄
圖 1-1(a) 太陽能集光器示意圖 ... 3 圖 1-1(b) CPC 架構示意圖 ... 3 圖 1-2 LED 自由形曲面設計 ... 3 圖 1-3 方向性背光與使用情境之示意圖 ... 5 圖 1-4 TRVL 液晶層方向性背光架構 ... 5 圖 1-5 雙光源方向性背光 ... 6 圖 1-6 方向性光場與顯示器視角示意圖 ... 7 圖 2-1(a) 真空中的光線傳播(I) ... 11 圖 2-1(b) 真空中的光線傳播(II) ... 11 圖 2-2 光線於介質間(折射係數 n)的傳播 ... 11 圖 2-3 三維不變量之示意圖 ... 12 圖 2-4 二維不變量之示意圖 ... 12 圖 2-5 光線從dA 到3 dA 的不變量示意圖4 ... 14 圖 2-6 光線從dA 到4 dA 的不變量示意圖3 ... 14 圖 2-7 點對點的 Cartesian oval ... 17圖 2-8(a) 點對波前的 Cartesian oval ... 18
圖 2-8(b) 波前間的 Cartesian oval ... 18 圖 2-9 點對點的 SMS 示意圖 ... 19 圖 2-10 點對點的 SMS 計算流程 ... 20 圖 2-11(a) SMS 曲面編織流程(I) ... 20 圖 2-11(b) SMS 曲面編織流程(II) ... 20 圖 2-12(a) CPC 反射曲面建置流程(I) ... 21 圖 2-12(b) CPC 反射曲面建置流程(II) ... 21
vii 圖 2-13 CPC 曲面建置完成圖 ... 22 圖 2-14 CPC 入光條件示意圖 ... 22 圖 2-15 CPC 幾何結構示意圖 ... 22 圖 2-16 CPC 波前行進示意圖 ... 22 圖 2-17 RX 光學系統示意圖 ... 24 圖 2-18 RXI 光學系統示意圖 ... 25 圖 2-19 RX 系統的 SMS 求解流程 ... 25 圖 3-1 SMS 透鏡建置條件示意圖 ... 27 圖 3-2 SMS 透鏡不變量守恆示意圖 ... 28 圖 3-3 SMS 透鏡邊緣條件的光追跡 ... 29 圖 3-4 SMS 透鏡設計流程(I) ... 29 圖 3-5 SMS 透鏡設計流程(II) ... 31 圖 3-6(a) SMS 透鏡內插計算流程(I) ... 31 圖 3-6(b) SMS 透鏡內插計算流程(II) ... 31 圖 3-7 點對點 SMS 建置條件示意圖 ... 32 圖 3-8 點對點 ray-fan 模擬圖 ... 32 圖 3-9 成像面照度分布圖 ... 33 圖 3-10 LED 角度限制條件示意圖 ... 34 圖 3-11 光學模組參數示意圖 ... 34 圖 3-12 SMS 透鏡架構模擬圖 ... 35 圖 3-13(a) SMS 透鏡 ray-fan 示意圖 ... 36 圖 3-13(b) SMS 透鏡光場分布圖 ... 36 圖 3-14 LED 光場分布圖 ... 36 圖 3-15(a) CPC 大角度收光示意圖 ... 37 圖 3-15(b) CPC 限制條件示意圖 ... 37
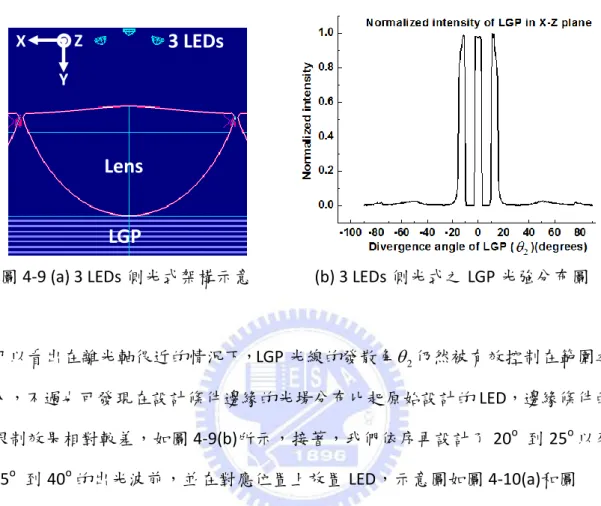
viii 圖 3-16 逆介質 SMS 架構示意圖 ... 38 圖 3-17 逆介質架構模擬圖 ... 38 圖 3-18 逆介質 ray-fan 示意圖 ... 39 圖 3-19 逆介質架構之光場分布 ... 39 圖 3-20 逆介質結合 LGP 架構示意圖 ... 40 圖 3-21 出光角度與模組長度關係圖 ... 41 圖 3-22 收光角度與模組長度示意圖 ... 41 圖 3-23 不同 LED 大小間模組長度和出光角度的關係 ... 42 表 3-1 模組長度和參數間的關係表 ... 42 圖 3-24 逆介質收光角度和模組長度關係圖 ... 43 圖 3-25 逆介質出光角度和模組長度關係圖 ... 43 圖 3-26 逆介質中不同光源大小間關係比較圖 ... 44 圖 3-27 模擬比較效率的兩光學架構 ... 45 表 3-2 逆介質和一般透鏡兩者效率比較表 ... 46 圖 4-1 側光式 LED 背光架構 ... 48 圖 4-2(a) 側光式背光與微結構俯視圖 ... 48 圖 4-2(b) 側光式背光與微結構側視圖 ... 48 圖 4-3 側光式架構之 X-Z 帄面圖 ... 49 圖 4-4 側光式架構旋轉排列 ... 50 圖 4-6 側光式背光 LGP 出光角度示意 ... 51 圖 4-8 LGP 出光強度分布圖 ... 51 圖 4-9(a) 3 LEDs 側光式架構示意 ... 52 圖 4-9(b) 3 LEDs 側光式之 LGP 光強分布圖 ... 52 圖 4-10(a) 5 LEDs 側光式架構 ... 52 圖 4-10(b) 5 LEDs 側光式之 LGP 光強分布圖 ... 52
ix 圖 4-11(a) 7 LEDs 側光式架構 ... 53 圖 4-11(b) 7 LEDs 側光式之 LGP 光強分布圖 ... 53 表 4-1 多角度光強比較表 ... 53 圖 4-12 方向性背光示意圖………54 圖 4-13 (a)背光輝度沿 X 軸方向分布圖………54 圖 4-13 (b)背光輝度沿 Y 軸方向分布圖……….54 圖 4-14 透鏡架構示意圖(10 度)……….55 圖 4-15 光強度分布圖(10 度) ……….55 圖 4-16 背光架構示意圖(10 度).………55 圖 4-17 背光輝度沿 X 軸方向分布圖(10 度) ………55
1
第一章 緒論
本章目錄: 1.1 非成像曲面的發展 1.2 方向性背光的發展 1.3 研究動機 1.4 論文架構 近年來由於環保意識抬頭,綠色環境(Green Environment)已被各個產業視為 永續發展的重要議題。以液晶顯示器(Liquid-Crystal Display,LCD)產業為例,具環 境保護的綠色顯示器(Eco-Display)被視為未來重要的研究主軸,許多研發單位已 著手研究如何增加光學系統的效率、減少生產製作中材料本身的有毒物質、降低 加工製造過程中能量的浪費,甚至透過更便捷的交通運輸方式,來控制整體二氧 化碳的排放量等等。因此,對於一個 Eco-Display 的背光模組而言,高亮度、高 均勻度、高穩定度等傳統設計訴求已不能滿足現今的市場期待,如何在不大幅增 加生產成本的前提下,使用對環境無害的材料並實現高效率、低耗能的方向,從 產業永續發展的角度來看顯得更為重要。 在環境保護的議題上,含汞元件有汙染環境的疑慮,所以歐洲及日本等國家 均對於汞的使用及進出口有其嚴格的限制。如歐盟 RoHS 已嚴格規範從 2006 年 7 月開始,包含汞等六種有毒物質,限制使用在電子產品當中;而荷蘭甚至早於 1999 年起即禁止進口或生產任何含汞產品,再加上 LED 通常具有低耗能、壽命 長、耐用度高、反應時間快速、高色彩飽和度…等良好的燈源特性,因此,採用 無汞 LED 作為光源之背光模組,勢必會在未來逐漸取代傳統含汞之冷陰極燈管 (Cold Cathode Fluorescent Lamp,CCFL)背光模組。此外,若以 LED 光源配合上側2 光式背光模組的設計,使得其液晶面板的後方不需再配置 LED 模組,即能有效減 少面板厚度,打造出兼具環保與輕薄的背光模組! 一般來說,基於 Eco-Display 對於背光模組的訴求,除了可使用 LED 做為背 光模組的光源外,亦能藉由調控背光模組的出光角度,來增加面板出光後的利用 率,而要做到控制背光的出光角度,通常會採用雙光源的方式,或是利用雙層液 晶的結構來達到目的,但這些方式容易造成背光模組的體模厚重,且光源出光效 率也不高(約一般背光模組的 70%-80%),故本研究主要目的是基於側光式背光模 組的機構,透過一層導光板的設計,配合上非成像曲面的設計方法,使得 LED 出 光至導光板時能有效控制在特定角度內,進而達成方向性背光的目的! 1.1 非成像曲面的發展 一個成像光學系統包含了三個主要部分:物體、光學元件、影像,而其中物 體通常又可視為一組一組的點光源向四面八方出射,當每一組光線被光學元件所 接收後,就會被集中到影像上的一點,所以可以藉由點對點的分析,來得到像差、 放大率、MTF(Modulation Transfer Function)…等資訊。
不過,對於一個非成像光學系統而言,並不考慮物體和影像的問題,取而代 之的是光源和接收面,其中的影像之於成像光學系統,就如同非成像光學系統所 產生的輻照度分布。而最早的非成像光學系統是應用在收光器的設計上,如圖 1-1(a) [1]所示,藉由設計收光器的光學結構,使收光器的效率逼近理論最大的極 值(熱力學定律),像複合式拋物面收光器(Compound Parabolic Concentrator)就是 第一個被設計出來的二維收光器,示意圖如圖 1-1(b) [2], 隨著 CPC 成功地應用 在實務上後,非成像光學的發展才逐漸嶄露頭角!
3 圖 1-1 (a)太陽能集光器示意圖[1] (b) CPC 架構示意圖[2] 而目前非成像曲面的設計發展已日趨成熟且繁複,從早期只能針對點光源和 軸對稱的光學系統來設計,到現在已有許多方法來解決面光源以及非軸對稱的光 學系統,其中較廣為運用的是自由形曲面的光學設計方法,主要是因為此光學設 計的方法有較大的設計維度和自由度,如圖 1-2 [3]所示,能廣泛應用在各式各樣 的光源和接收面的結構,不過,也由於設計的條件較不受限,故對設計者來說, 其數學模型的建立和解決的流程也相對困難。 圖 1-2 LED 自由形曲面設計[3] 自由形曲面的設計方法,通用於各種折射式或反射式光學界面的排列組合, 主 要 方 法 可 分 為 三 大 類 : 複 合 參 數 法 (Multi-parameter Optimization Design method),偏微分方程法(Partial Differential Equations method) ,以及同步多曲面 法 (Simultaneous Multiple Surface method)。複合參數法是先將未知曲面表示成一
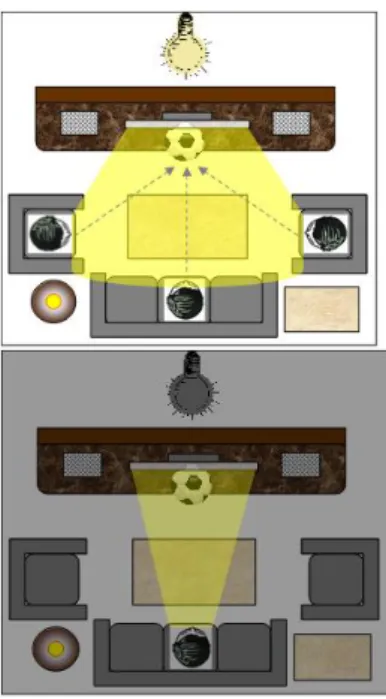
4 個 N 階多變數的多項式表示式,此時,可依照設計需求來決定接收面的評價函 數,而評價函數會隨著不同的變數參數值有所變動,故可將設計流程轉為尋找評 價函數的全域極值之數學問題;偏微分方程法則主要是針對點光源的條件下,利 用軸對稱或非軸對稱的接收面輻照度分佈,配合上光追跡的向量場 Snell’s Law 可 推導出一組偏微分方程,此方程組的解即為曲面各點的位置向量;而同步多曲面 法是利用 Fermat’s principle 來預測光線從光源行進至接收面的路徑,藉以編織未 知曲面中各點的位置向量及其法向量,此方法放寬了光源的條件限制,使得點光 源或面光源皆能符合其應用條件,對於非單一光源和接收面的問題也有對應的設 計流程。 1.2 方向性背光的發展 視角一直是液晶顯示技術中重要的一環,除了藉由視角的調變可增加顯示器 出光後的利用率外,在各種應用層面上,如發展廣視角的視聽劇院,或因保密與 隱私而設計的窄視角螢幕(ATM、手機、個人辦公)等,皆是利用視角控制的技巧, 而近來針對適應各種情況做寬窄視角切換的文獻和專利逐漸增加,也顯現出此塊 市場的需求正快速成長。 一般而言,考慮到顯示器的使用情形,其外部的條件如觀測者的位置、人數 與觀賞環境的亮暗等,此時,藉由顯示器的視角調變技術便能達到節能的目的。 如圖 1-3 所示,有別於一般多觀測者(multiple users)在明亮的環境下觀賞顯示器 時,顯示器必頇提供一高亮度、廣視角之光場,才能提供每個觀測者最佳的視覺 感受,當顯示器只被單一觀測者(single user)所使用,或在環境亮度較低的情況 下,此時顯示器僅需提供一窄視角的光場,即能滿足單一觀測者的使用需求,而 對單一觀測者來說,視覺感受上雖然並沒有太大的差異,但視角之外的光卻因此 被大幅節省下來。
5
圖 1-3 方向性背光與使用情境之示意圖
在目前相關文獻中,視角的調控主要分為兩種方式,一種是加一層視角變化 面板(Viewing Angle Switching,VAS)如:TRVL(Thermally Retardation Variable Layer) 液晶層,另一種則是利用多光源和多層幾何架構的光學機制;而利用液晶層來控 制視角又有兩大方向,其一是降低螢幕亮暗態對比度,但低對比度將造成灰階反 轉以及色彩偏移,使得顯示器影像難以辨識與閱讀。其二則是藉由降低非正向視 角的光穿透率(Outcome Transmittance),來達到視角控制的目的,就現有技術而 言,降低非正向光強度較降低對比度更易達到窄視角的目的,但除了原有液晶層 外,必頇再增加一層以上的液晶層做灰階控制之用,如圖 1-4 [4]所示,而這卻會 造成顯示器整體亮度過暗的狀況。 圖 1-4 TRVL 液晶層方向性背光架構[4]
6 除了上述利用液晶層的方法以外,另一種構想為多光源配合多層幾何結構的 光學機制,利用不同光源對應到不同光路的方式,使得光源出光角度能有效控制 在特定範圍,像是疊加了兩個獨立供光的側光式背光系統,如圖 1-5 [5]所示,便 可藉由光路設計的不同來達到寬窄視角切換的目的,當單獨開啟上層具有微溝槽 的導光板時,背光會提供一窄視角光場以供正向觀賞,反之,若開啟下層一般網 點印刷導光板,則能供給一廣視角光場至各個觀賞方向。除了仍然是各方向無差 別供給光線外,可明顯看出這種多層光學架構的缺失,亦即多層導光板的設計容 易造成較下層的導光板出光效率過低(最高可達上層光學效率的 82%)的情況,而 這無疑造成了不必要的能源浪費。 圖 1-5 雙光源方向性背光[5] 1.3 研究動機 視角的可調性對於環保意識高漲的現今社會來說,是一項值得發展的綠色技 術,但目前針對此項需求所發展出來的技術有許多缺失仍待克服,以液晶架構來 說,雖然可藉由液晶排列方式的改變,達到漸變的多視角切換,但由於液晶分子 運動的特性,難以做到高速切換視角的設計,此外,通常這種液晶架構需配合直 下式背光模組,使得背光厚度無法有效降低,若以光學效率來看,多層的光學結 構設計不僅會讓整體出光效率降低,也會增加背光厚度,而寬視角的光場和窄視 角大幅重疊的部分,使得面板出光後的利用率亦無法有效提升。
7 針對上述課題,為了使背光模組在高空間和高光學利用率下做到視角切換, 本研究提出一新型背光系統:結合非成像曲面設計與側光式背光架構,做出一光 軸對稱之發光源單元。對於從不同角度觀賞面板的人來說,利用軸上與離軸的 LED 切換,可提供面板適當角度的光場變化,觀賞區域之外將不會提供光線,可 避免無謂的能量浪費。如圖 1-6 所示:(a)觀賞者位於窄視角區域內,不需提供寬 角度的光場即可達到欣賞的目的,故背光系統僅需提供正向光場(Zone I);(b)假 設觀賞者位於寬視角區,則不一定需要提供正向能量,故背光系統僅需提供寬視 角區域的光場(Zone II );(c)在多觀賞者的情形下,若在不同的視角區域中皆有觀 賞者,此時背光系統就需要各方向的光場,故全區光場分布皆開啟,各個視角區 域均提供光線 (Zone I+II)。 圖 1-6 方向性光場與顯示器視角示意圖 這種背光模組的設計概念,主要是利用具有方向性的光源配合上側光式背光 架構,使得出光方向得以控制在特定區域,而本研究為了使 LED 光源具有方向性 的調變,先利用非成像曲面的方法設計一組二次光學,讓 LED 出光至導光板的角 度 隨 著 二 次 光 學 的 設 計 改 變 , 此 二 次 光 學 的 架 構 可 經 由 同 步 多 曲 面 法 (Simultaneous Multiple Surface method)求得,如此一來便可將演算流程程式化,
8 優化的過程也能隨著設計需求來改變輸入的參數,進而可得一二次光學最佳效率 和方向性調變的數值解,此外,藉由側光式架構的設計,也使本研究的方向性背 光模組具有輕薄的特性,故能在高空間和光學利用率的條件下,建立出一較佳的 方向性背光模組。 1.4 論文架構 本研究的演算法主要建立在非成像曲面下的同步多曲面法,故在第二章會先 介紹 Cartesian oval 的理論基礎、同步多曲面法的演算流程、複合式拋物面收光 器以及不變量守恆的基本概念,並引入一個多項式內插的數值方法 Hermite interpolation,來逼近各個數值點間真實存在的多項式關係,使得本研究所需的 非成像光學元件得以建立。 第三章會利用同步多曲面法建構出可讓背光準直的二次光學元件,並根據研 究所需的限制條件推導出相對應的同步多曲面演算流程,以期能在限制條件下達 到透鏡架構的最佳光學效率,故會藉由不同的參數條件測試,多方面地分析同步 多曲面法中最佳透鏡架構的特性,以數值方式建立出透鏡架構的特性解,接著利 用上述參數條件的分析結果,會在透鏡架構下引入複合式拋物面收光器的概念, 應用複合式拋物面收光器的設計理論,使得光源大角度的光線能被充分利用,並 同時將收光器的架構參數化,分析透鏡架構結合收光器的光學特性,最後為了增 加光路的空間利用率,我們提出一種逆介質的光機架構,使得設計出來的二次光 學元件能在高空間、高光學利用率下達成本研究的設計目標。此外,在光學設計 的過程中,參數調變的結果皆以光學模擬軟體 LighttoolsTM驗證理論計算的正確 性,分析並比較兩者的差異性,最後再根據模擬結果找出符合限制條件的最佳光 學元件參數。
9 第四章是將第三章所設計出來的準直性背光光源的二次光學機構加以利 用,運用第三章所提的同步多曲面演算流程及其光學機構的特性,考慮入多光源 和側光式背光的設計條件,使得設計出來的光學機構能藉由軸上與離軸的光源切 換,提供面板適當角度的光場變化,進而達到寬窄視角切換的目的,並同樣利用 光學模擬軟體 LighttoolsTM做理論計算上的驗證,分析比較理論值和模擬數據的 差異,在較佳的方向性光場分布和背光出光效率的條件下,找到側光式方向性背 光的最佳光學機構,第五章則為本研究的結論和未來展望。
10
第二章 基本理論
本章將非成像光學的相關概念引入系統設計之中,其中包含了光學系統特性 的描述:不變量、多項式內插數值點的方法: Hermite interpolation、非成像曲面的 設計方法之:同步多曲面法(Simultaneous Multiple Surface)和複合式拋物面收光器 (Compound Parabolic Concentrator)設計流程,最後是非成像系統的專有名詞介紹 與應用。
本章目錄:
2.1 不變量(Etendue) 2.2 Hermite interpolation
2.3 同步多曲面(Simultaneous Multiple Surface)
2.4 複合式拋物面收光器(Compound Parabolic Concentrator) 2.5 RR、RX、XR、XX、RXI 光學系統 2.1 不變量(Etendue) 當光線欲經過一光學系統時,此光線需要面積和角度空間來傳播, 而不變 量的大小正好表示出此一光學系統的特性。如圖 2-1(a) [6]所示,假設我們有一個 半徑為r的球形光源S ,當光線從球形光源發射傳播至半徑為R d 的球面1 A 時,1 對於球面A 上的每一個點,從球形光源1 S 所傳播出來的光線都會被限制到角度R 1 內,其中角度1可由sin1r d/ 1求得,故可把球形光源的表面積表示成 2 2 2 2 1 1 1 1 4 4 sin sin s A r d A 。
11 圖 2-1 真空中光線傳播之示意圖[6] 同樣地,當光線繼續傳播至球面A 時,如圖2 2-1(b) [6]所示,我們也可以利 用上述的關係式,將球形光源的表面積表示成 2 2 1sin 1 2sin 2 s A A A ,因此可 發現到當光線傳播距離越遠時,雖然光線所利用到的角度空間越小,但利用的面 積空間卻越來越大,故 2 sin k k A 對於光線在真空中的傳播來說為一不變量,若考 慮在不同介質中傳播時,如圖 2-2[6]所示,則可寫成 2 2 2 2 * 2 1 sin 2 2 2sin 2 s A A n A n , 圖 2-2 光線於介質間(折射係數 n)的傳播[6] 此時不變量為 2 2 sin k k k A n ,所以我們定義三維的不變量為: 2 3 D cos dU n dA d (2.1) (a) (b)
12 圖 2-3 三維不變量之示意圖[6] 如圖 2-3 [6]所示,其中dAcos為光線傳播的有效面積,d則為光線傳播的單 位立體角,而二維的不變量也可寫成式子(2.2): 2 D cos dU nda d (2.2) 如圖 2-4 [6]所示, 其中dacos為單位有效長度, d則為光線傳播的單位張角。 圖 2-4 二維不變量之示意圖[6] 假使我們考慮一個無損耗的光學系統,也就是光線在傳播的過程中所有的能 量皆未損失,每一處傳播的接收面和出射面都符合黑體輻射的定義,此時,光學 系統為了滿足熱力學第二定律,不變量必守恆。其證明如下: 由於輝度的定義如式子(2.3), cos d L dA d (2.3)
13 所以我們可以將光通量寫成式子(2.4): 2 * 2 * 2 cos cos L d n dA d L n dA d L dU n (2.4) 其中 n 為折射係數, * 2 L L n 為基礎輝度,接著因為界面符合黑體輻射條件,可 將基礎輝度改以黑體輻射輝度表示,如式子(2.5), 4 * vT L (2.5) 其中 8 2 4 5.670*10 ( / ) v W m K 為真空中的 Boltzmann 常數, ( ) T K 為黑體輻射的 絕對溫度;然後考慮到系統為無損耗系統,系統總能量不會變化,亦即 4 * vT L 中的系統溫度T為一定值,若以此系統中任一傳播區段dA 到3 dA 來看,此時每4 個介面的基礎輝度必相同,即 * * 3 4 L L ,L 和*3 * 4 L 分別表示dA 和3 dA 面上的基礎輝4 度,此外,其系統單位光通量也必頇是定值,這樣才表示光的能量不會損失在系 統之中,如式子(2.6)所示, * * 3 34 4 43 d L dU L dU (2.6) 可發現在式子中dU34dU43,其中dU 表示當光線由34 dA 傳播到3 dA 時,對於出4 射面dA 所觀察到的不變量,如圖3 2-5 [6]所示,
14 圖 2-5 光線從dA 到3 dA 的不變量示意圖4 [6] 圖中n3為傳遞介質的折射係數,3和4分別為dA 和3 dA 面上的法向量與中心距4 離r的夾角,故利用三維不變量的定義,可將dU 寫成式子34 (2.7), 2 2 4 4 34 3 3 3 34 3 3 3 2 cos cos cos dA dU n dA d n dA r (2.7) 43 dU 則為當光線由dA 傳播到4 dA 時,出射面3 dA 所觀察到的不變量,如圖4 2-6 [6] 所示, 圖 2-6 光線從dA 到4 dA 的不變量示意圖3 [6] 43 dU 亦可寫成式子(2.8), 2 2 3 3 43 3 4 4 43 3 4 4 2 cos cos cos dA dU n dA d n dA r (2.8) 所以當我們要假設一無損耗的光學系統時,其不變量守恆為其必要條件。
15 2.2 Hermite interpolation [8] 在數值分析的方法中, Hermite interpolation 是一個內插資料點的多項式方 法,此方法所產生的 Hermite 多項式和 Newton 多項式皆是藉由計算資料點間的 差分來取得,不過,與 Newton 多項式不同之處在於 Hermite 多項式必頇同時代 入 資 料 點 的 值 和 該 點 的 一 階 微 分 值 , 也 就 是 說 初 始 條 件 除 了 要 給 資 料 點 , ( 0, 1, . . . ) i x i n 所 對 應 的 值 yi, (i 0, 1, . . . )n , 同 時 也 要 給 其 對 應 的 一 階 微 分 值 ' , ( 0,1,... ) i i z y i n 值,如此才可藉由這些初始條件求得階數最高為2n1的 Hermite interpolation 多項式。 如式子(2.9)所示,考慮一組資料點( ,x y0 0), ( ,x y1 1),..., ( ,x y ,以及該組資料n n) 點的一階微分值( ,x z0 0), ( , ),..., ( ,x z1 1 x zn n): 2n 1( )i i P x y , P'2n1( )xi zi , i0,1, 2...n (2.9) 其中P2n1( )x 為 Hermite interpolation 多項式,定義為式子(2.10): 2 1 0 ( ) [ ( ) ( ) ] n n k k k k k P x H x y K x z
(2.10) 此式子中的H x 和k( ) K x 分別為k( ) : 2 ( ) [ ( )] (1 2 ' ( )( )) k k k k k H x L x L x xx (2.11) 2 ( ) [ ( )] ( ) k k k K x L x xx (2.12) 其中L x 為k( ) Lagrange polynomial,定義為:16 0 ( ) n i k i k i i k x x L x x x
(2.13) 故利用上述所整理的式子,即可在有限的資料點中,以內差一個 Hermite interpolation 多項式的方法,來逼近在各個資料點間距裡,資料點彼此之間所真 實存在的多項式關係。2.3 同步多曲面(Simultaneous Multiple Surface)
同步多曲面法或被稱為 Minano-Benitez 設計法,是一種非成像曲面的光學設 計方法,一開始是由 Minano 和 Benitez 於 1990 年代初期所發展出來的一套二維 曲面計算方法,直到 1999 年 Benitez 才將這套設計方法的維度拓展到三維,這種 方法主要是將入射波前耦合成出射波前的過程數學化,以利計算大量且複雜的波 前耦合,而其特色在於每對入射波前和對應的出射波前都是同時被考慮進來設計 的,也就是說當考慮的波前有N對時,則此光學系統必頇要設計至少N個曲面 才能同時滿足N對波前的需求! 同步多曲面法的數學流程可視為像是一段段 Cartesian oval 的一般性計算, 故為了瞭解同步多曲面法,首先必頇先知道 Cartesian oval,我們可以定義其為: 當一光源發出的波前欲透過一介面產生所需要的目標波前時,光源波前的行進頇 遵守 Fermat 原理的條件,故當光程S決定後,光源波前的行進方向和路徑即被 固定,此時,會在介面產生唯一曲線或曲面的解,使得光源波前在行進光程S後 轉變為目標波前,此介面的解即為 Cartesian oval。 以點光源為例,如圖 2-7 [6]所示,式子(2.14)表示如下,我們可以將 Cartesian oval 上的每點都用一位置向量 P 來表示,
17 圖 2-7 點對點的 Cartesian oval[6] P E vt (2.14) 其中 E 為光源的位置向量, v 為從點 E 到點 P 的單位向量,如圖 2-7 [6]所示,可 將 v 寫成v(cos ,sin ) ,而 t 則為兩者間的距離,接著寫下從光源 E 出發到目標 面 R 所走的光路以及相對應的光程S, ( ) ( ) PR d RP RP (2.15) ( ) ( ) S t n E vt R E vt R (2.16) 其中dPR為 Cartesian oval 到目標面 R 的距離,n 為介質中的折射係數,此時光程S 的表示式(2.16)中只剩下一未知數t( ) ,其中為自變數,故解出式子(2.16)中的 t 之後,即可得此問題中 Cartesian oval 的位置向量 P ,此一方法也可應用在球面 波對應到帄面波,如圖 2-8(a) [6]所示,甚至更一般性的光源波前w 到目標波前1 w2 的計算上,如圖 2-8(b) [6]所示。
18
圖 2-8 (a)點對波前的 Cartesian oval[6] (b)波前間的 Cartesian oval[6]
但不同的地方在於 Cartesian oval 所算出來的解只有對單一光源來說是完美 的,因為 Cartesian oval 同一時間只考慮一個光源的波前變化,可是在很多實作 上,如 LED 通常會延展成不均勻的線光源甚至是面光源而非完美的單一光源,所 以若用單一光源的解來逼近線光源或面光源真實解的時候,往往會造成光學效率 降低,所以一般在使用 Cartesian oval 時,都會再加上一個疊代設計的動作,才 能優化單一光源對應到延展性光源的解,而與之相左的,同步多曲面法並不需要 利用優化迴圈,這方法本身就是利用光源的延展做為輸入的參數,來建立所需的 光學曲面去滿足光源,所以比較能接近光學效率的極限! 而 Cartesian oval 的計算方式,同樣也被運用在同步多曲面法上,只是同步 多曲面法的設計流程和 Cartesian oval 相比,最大的不同在於同步多曲面法同時 考慮了兩個(含)以上的波前耦合,以一軸對稱的 RR 光學系統來看,若考慮光線 欲從兩光源E 和1 E 分別傳遞到接收器2 R 和1 R 點上,如圖2 2-9 [6]所示,
19 圖 2-9 點對點的 SMS 示意圖[6] 此時需先假設一初始點P 和該點的單位法向量0 n ,便可將0 E 到2 R 的光程表示成1 式子(2.17), 2 0 0 1 1 1 [ , ] [ , ] [ , ] S E P n P P P R (2.17) 其中的中括號表示兩點位置向量之間的距離,而我們可以發現此式子中要求的未 知數P 和求1 Cartesian oval 的解一樣,只要把式子中的未知向量P 整理成只剩下1 一未知數 t 即可,如式子(2.18)所示, 2 0 0 1 0 1 [ , ] ( ) ( ) S E P nt P vt R P vt R (2.18) 其中 t 為P 到0 P 的距離,1 n 為介質中的折射係數, v 則為P 到0 P 的單位向量,故1 可解出未知數 t 來求得P 的位置向量及該點的單位法向量1 n ,而且因為考慮到軸1 對稱的因素,E 到1 R 的光程同樣也可寫成式子2 (2.19),
20 2 1 1 2 2 1 [ , ] [ , ] [ , ] S R P n P P P E (2.19) 如此便解出P ,同樣的流程可陸續求出2 P 、3 P 、4 P 一直到5 P 點,如圖n 2-10 [6] 所示, 圖 2-10 點對點的 SMS 計算流程[6] 接著,我們利用軸對稱系統的特性,把P 對光軸作一鏡射點1 Q ,此時1 Q 也會滿1
足 Cartesian oval 的解,然後利用 Hermite interpolation 在Q 和1 P 間內插入一多項1 式,此多項式即表示我們在Q 和1 P 間所假設的面,同時在此面上取任意1 K點內 插點,同樣地再對內插的K點做一次次 Cartesian oval 的計算,反覆計算便可陸 續得到P 到0 P 、2 P 到1 P 之間的曲面,如圖3 2-11(a) [6]到圖 2-11(b) [6]所示, 圖 2-11 SMS 曲面編織流程[6] (a) (b)
21 最後利用軸對稱特性將計算出來的點都鏡射到光軸的另一側,便可以得到一完整 的 RR 光學系統,此計算流程可應用在各式各樣波前之間的耦合,此外還能配合 Etendue 守恆的設計方法,讓系統效率逼近熱力學的理論值! 在同步多曲面法的計算流程中,我們可以發現到在兩對波前之間耦合的條件 下,不管是對於每個點P 、1 P 、2 P3…P ,或是對於每個n P 到n Pn2的曲面來說, 都必頇要同時符合兩次 Cartesian oval 的計算,也就是說利用這樣的計算方法, 使我們可以在編織N個曲面的同時,也滿足了N對波前之間耦合的條件!
2.4 複合式拋物面收光器(Compound Parabolic Concentrator)
複合式拋物面收光器的設計原理是利用邊緣光線的追跡,來保證只有在特定 角度內的光線才會被吸收,假設一二維收光器的長度為[ , ]A B ,如圖2-12(a) [6] 所示,若想要收到角度內的光線,此時需先設一反射斜面[ ,B D 和1] [ ,A C ,1] 使得當角度的光線打到D 點或1 角度的光線C 點後,會分別反射到 A 點及1 B 點上, 圖 2-12 CPC 反射曲面建置流程[6] 接著可用相同的方式繼續找到下一段[C Cn, n1]和[D Dn, n1],如圖 2-12(b) [6]所 示,直到Cn1碰到角的帄行光線或Dn1碰到角的帄行光線時就停止建置曲 (a) (b)
22 面,如圖 2-13 [6]所示,這種曲面的建制方式其實跟拋物線的原理有異曲同工之 妙,也就是說曲面上的任何一點都是以 A、 B 點為焦點的線段,所以才被稱為是 拋物面收光器! 圖 2-13 CPC 曲面建置完成圖[6] 此外,我們可以發現到這樣建置的二維曲面,主要有三大特性,首先是可以有效 收到角度內的光線,當角度超過時則不會影響收光器,如圖 2-14 [6]所示, 圖 2-14 CPC 入光條件示意圖[6] 其次,經由複合式拋物面收光器的收光角度和幾何結構關係式子(2.20),如圖 2-15 [6]所示,可發現當設計的收光角度越小時,所付出的空間代價h就會越大, 圖 2-15 CPC 幾何結構示意圖[6] 圖 2-16 CPC 波前行進示意圖[6]
23
1 2
1 / 2 / 2 1 sin tan tan 2 tan
a a h a (2.20) 其中a 和1 a 的關係亦可寫成式子2 (2.21),如圖 2-16 [6]所示,是利用帄行波前[ , ]C E 經由 BD 拋物曲面會反射至焦點 A 的特性; 2 2 1 [ , ]C B a [ , ] [ , ]E D D A a a sin (2.21) 最後,利用這關係式(2.21),我們也可證明這樣的設計方式是滿足不變量(etendue) 守恆的條件,也就是會逼近熱力學的極限,式子證明如下: 利用二維不變量的定義式(2.22),可將a 和1 a 上觀察到的不變量分別寫成式子2 (2.23)和式子(2.24), 2 D cos dU nda d (2.22) 1 1* 1*cos 1 1 a dU da d (2.23) 2 1* 2*cos 2 2 a dU da d (2.24) 分別作積分後分別可得式子(2.25)和式子(2.26), 1 1 cos 1 1 2 sin1 a U a d a
(2.25) 2 / 2 2 2 2 2 / 2 cos 2 a U a d a
(2.26) 又利用a 和1 a 的關係式2 a2 a1sin,便可得到Ua1=U 的證明a2 !24 2.5 RR、RX、XR、XX、RXI 光學系統 在同步多曲面的方法中,會依照設計的光學系統種類給予不同的命名,主要 有 RR、RX、XR、XX、RXI 五大類,利用這種分類方式,不僅將設計的系統模型做 了初步的分門別類,也讓設計者可以有效地找到對應的數學流程,來做為設計時 的參考與評估。 這些系統的命名都有其依循的規則和定義,像是命名中若有字母 R,表示光 線在此系統會經過一折射介面,字母 X 代表一反射介面,而 I 則表示光線會在介 面產生全反射的現象,此外,這些字母的順序也暗示設計者在光學系統中,所考 慮的光學介面先後順序,像是 RX 即表示系統的光路會先考慮折射介面再考慮反 射介面,如圖 2-17 [6]所示,光源出發的波前w 和1 w 先後經過一折射和一反射介2 面後傳遞到接收面[R R 上,1, 2] 圖 2-17 RX 光學系統示意圖[6] 以此類推, RXI 是先經過 RX 光學系統後再考慮一全反射的介面,如圖 2-18 [6] 所示,以光源波前w 上的1 W 點為例,考慮的光路分別會在3 P 、3 Q 和3 S 點發生3 折射、反射和全反射的現象,
25 圖 2-18 RXI 光學系統示意圖[6] 其他 RR、XR、XX 光學系統也是相同的命名方式,而從這些命名即可決定所用的 Cartesian oval 公式,以 RX 光學系統為例,光程表示式如式子(2.27),解的流程如 圖 2-19 [6]所示, 2 0 0 1 1 1 [ , ] [ , ] [ , ] S W P n P P n P R (2.27) 可將式子整理成式子(2.28), 2 0 0 1 0 1 [ , ] ( ) ( ) S W P nt n P vt R P vt R (2.28) 圖 2-19 RX 系統的 SMS 求解流程[6]
26 其中P 為假設的起始點,0 n 為P 點上的單位法向量,0 v 則表示P 到0 P 點的單位1 向量,故式子可整理成只含未知數 t 的 Cartesian oval,然後藉由 t 的解可求得P 和1 該點法向量n ,接著便能陸續算出1 P 、2 P3…P ,因此,我們可以發現流程跟前n 述的 RR 光學系統求解過程幾乎一樣,只差光線在P2n1( n 為正整數)點上的向量變 化會和 RR 系統不同,故熟知這些命名對應的數學流程有助於我們在處理複雜的 光學系統,也就是說當系統包含了各式各樣的介面時,可將複雜的 Cartesian oval 表示式以這些已知數學式子間的排列組合來取代,能縮減設計的流程!
27
第三章 準直背光光源設計
本章將利用同步多曲面法建構出可讓背光光源準直的二次光學元件,並根據 限制條件推導出相對應的同步多曲面演算流程,藉由不同的參數條件測試,多方 面地分析同步多曲面法中最佳透鏡架構的特性,接著會在透鏡架構下引入複合式 拋物面收光器的概念。在光學設計的過程中,參數調變的結果皆以光學模擬軟體 LighttoolsTM驗證理論計算的正確性,分析並比較兩者的差異性,最後再根據模擬 結果找出符合限制條件的最佳光學元件參數。 本章目錄: 3.1 同步多曲面演算流程推導 3.2 LighttoolsTM模擬驗證 3.3 二次光學架構特性分析 3.1 同步多曲面演算流程推導 本研究為了控制 LED 出光在特定角度內,欲利用 SMS 的方法設計一透鏡, 使出光至透鏡的光線都會收到特定角度內,所以我們先以 LED 發光邊緣的兩點 1 E 、E 為出光光源,並將目標波前2 w 、1 w 分別設為在2 角度上的帄面波,這 種利用邊緣光線的條件所建立的 SMS 透鏡,就能保證 LED 上所有經過 SMS 透鏡 出來的光線都會落在角度內,示意圖如圖 3-1, 圖 3-1 SMS 透鏡建置條件示意圖28 此外,為了使設計的 SMS 透鏡滿足不變量守恆的條件,本研究以側邊 SMS 編織 的設計方法為主,此方法主要特點在於設計的起始點是從透鏡的邊緣開始,而非 從透鏡的中心,如此一來便能限制透鏡在邊界的條件,同時也能確保透鏡滿足不 變量守恆。 在此光學架構下,對於透鏡入光面來說不變量為U1 2([X E0, 1] [ X E0, 2]), 其中[X E0, 1] [ X E0, 2]為X 到0 E 和1 E 兩點的光程差2 2a,故當光程差2a固定 時,X 點的位置軌跡可視為焦點在0 E 、1 E 兩點的雙曲線,表示式如式子2 (3.1), 2 2 2 2 1 x y a b (3.1) 其中 2 2 2 a b c , c 為 1, 2 2 E E ,而透鏡出光面 0 0 [M N 的不變量則為, ] 2 2[ 0, 0]sin U M N ,故其守恆條件式可寫成式子(3.2),示意圖如圖 3-2, 0 1 0 2 1 2 0 0 [ , ] [ , ] 2 [ , ] sin sin X E X E a U U M N (3.2) 圖 3-2 SMS 透鏡不變量守恆示意圖
29 如此便可分別求得不變量守恆的邊界條件N 點和0 X 點,接下來利用0 Snell’s Law,可藉由已知的向量E X 、1 0 X N 和目標波前向量0 0 2 w n 找出N 點和0 X 點上的0 法向量 0 N n 和 0 X n ,示意圖如圖 3-3, 圖 3-3 SMS 透鏡邊緣條件的光追跡 同時,為了使E 打到2 X 點上時也能傳播至波前0 w ,必頇將光程寫成式子2 (3.3), 如此一來總光程便可寫成式子(3.4),示意圖如圖 3-4, 1 [ 0, 0] [ 0, 2] [ 0, 2] [ 2, 2] S n N X N w n N N N w (3.3) 1 [ 2, 0] [ 2, 0] [ 0, 2] [ 2, 2] S S E X E X n N N N w (3.4) 圖 3-4 SMS 透鏡設計流程(I)
30 接著可將式子(3.4)整理成式子(3.5): 2 1 2 0 0 2 1 2 0 t ( ) w [E , ] n Q X X N t n S X (3.5) 2 0 0 2 1 N X X N t (3.6) 其中Q 為目標波前2 w 上任取一點,2 t 和1 X N 則分別為0 2 X 到0 N 的距離及單位向2 量,這樣便可將未知數整理成只剩下t 的表示式(3.7),並求出1 t 得到1 N 的位置2 向量, 2 2 2 0 2 0 1 0 2 [E , ] ( ) w w S X Q X n t n X N n (3.7) 同樣的方法也適用在從目標波前w 回推到1 E 點上,由於考慮的光學系統存在對1 稱性,可將總光程寫成式子,並將式子整成只剩下t 的表示式(3.10),求出2 t 得2 到N 的位置,示意圖如圖1 3-5, 2 ( 0 0 1 2 1) ( 0 0 1 2 1) [ 0, 1] nt N N N t E N N N t E S N w (3.8) 1 0 0 1 2 N N N N t (3.9) 2 2 2 2 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 2 2 2[( [ , ]) ( ) ] 4[( [ , ]) ( ) ] 4( 1)[( [ , ]) ] 2( 1) S N w n N E N N S N w n N E N N n S N w N E t n (3.10)
31 圖 3-5 SMS 透鏡設計流程(II) 求出N 和1 N 後,即可知道各個端點的位置和向量,接著利用2 Hermite interpolation 分別在X 到0 N 內、1 N 到0 N 內內插一多項式,並取其中2 K點內插 點,重複上述求點的方法,即可陸續找到透鏡曲面上的點,示意圖如圖 3-6(a)和 圖 3-6(b), 圖 3-6 SMS 透鏡內插計算流程 最後算到與 LED 光軸最近的點,再利用光學系統存在對稱性的特性,將求出來的 點以 LED 光軸當對稱軸找出鏡射點,即可得一完整的 SMS 透鏡曲面! 3.2 LighttoolsTM模擬驗證 3.2.1 成像系統測試 為了驗證推導的 SMS 演算流程,我們先以一個兩點對兩點的的成像系統做 為測試目標,假設光源E 、1 E 的位置向量分別為 ( 0.5, 2)2 和 (0.5, 2) ,且成像 (a) (b)
32 的位置向量分別是(1, 2)和( 1, 2) ,其中透鏡折射係數為 1.49,示意圖如圖 3-7, 圖 3-7 點對點 SMS 建置條件示意圖 利用上述推導的 SMS 演算流程,可得一組透鏡曲面的位置向量和該點法向量: (0.721,-0.62,0.778,0.627) (0.673,-0.917,0.531,-0.847) (0.634,-0.549,0.50658,0.86218) (0.575,-0.505,0.617219,0.7867) (0.446,-0.424,0.4633849,0.88615) (0.295,-0.3508,0.38824,0.921556) (0.047,-0.28938,0.06918,0.9976) (0.581,-0.95042,0.189745,-0.9818) (0.514,-0.97367,0.373099,-0.92779) (0.396,-1.01018,0.24369,-0.9698) (0.245,-1.0496,0.238707,-0.97109) (0.048,-1.07979,0.05279,-0.9986) (3.11) 接著,由於考慮的光學系統具有對稱性,可將這些算出來的數值點以X 0為對 稱軸,找到其鏡射點,並算出一完整的透鏡曲面,然後將數值代入 LighttoolsTM 中做模擬驗證,其 ray-fan 示意圖如圖 3-8, 圖 3-8 點對點 ray-fan 模擬圖
E
1E
2Y=2
Z
Y
X
Y=2
33 在目標面Y 2上的照度分布則如圖 3-9 所示。 圖 3-9 成像面照度分布圖 結果不論是從 ray-fan 示意圖或是照度分布圖中,我們皆可發現從點光源 1 E 、E 位置向量上所發出來的光線幾乎都會收在2 (1, 2)和( 1, 2) 的位置上,雖然 並不是所有光線,但考量透鏡曲面並非完美的光滑曲面,而是藉由數值內插得來 的,故結果仍符合當初預期。 3.2.2 非成像系統測試 接下來我們把光源從點光源拓展到面光源,目標位置也從點變成波前,亦即 欲將 LED 所有經過 SMS 曲面的光都收在特定角度內,故必頇先考慮 LED 發光邊 緣的兩點E 、1 E ,並將兩點對應的目標波前2 w 、1 w 分別設在2 角度的帄面波 上,這種利用 LED 邊緣光線建立的 SMS 透鏡,由於是取 LED 入光至 SMS 曲面的 角度極值,就能保證 LED 其他經過透鏡出來的光線都會落在 角度內,示意圖 如圖 3-10,
34
圖 3-10 LED 角度限制條件示意圖
此時,為了方便後面的理論計算和數據分析,我們先將構成此光學系統的主要因 子予以參數化,分別有 LED 光源的大小(Size,S)、光學模組的總長度(Total length of the module,T)、光學元件的收光角度(Receiving angle,0)以及目標波前的出 光角度(Convergence angle,1),各個參數的示意圖如圖 3-11 所示,如此一來便 能在得到計算結果同時,分析此光學系統中各個參數之間的數值關係,而這些解 也有助於評估之後的設計方向。 圖 3-11 光學模組參數示意圖 然後我們先以現有的 LED 規格大小做為模擬的光源,考慮一 Lambertian 光 場分布的 LED 光源,其大小為 2.3 mm * 0.5mm * 0.5mm,目標波前的出光角度設 在正負 2.5 度,透鏡的收光角度則為正負 50 度,此時將參數代入上述 SMS 演算 流程,即可得到一組起始條件(3.12):
35 1 2 1 2 0 0 w ( 1.15, 0) (1.15, 0) =(20.656,16.5,0.99887,0.0476) =(20.0011,15.84786,-0.49226,-0.8705) (sin(2.5* /180), cos(2.5* /180)) (sin( 2.5* /180), cos( 2.5* /180)) w E E N X n n (3.12) 其中N 和0 X 的前兩項為邊界條件的位置向量,且藉由上述0 SMS 流程可知此位 置向量必同時滿足 Snell’s Law 和不變量守恆的條件,而後兩項則為該位置向量上 的法線方向,然後將條件代入推導的 SMS 演算法中,便可陸陸續續得到一組透 鏡曲面的解,其光學架構示意圖如圖 3-12 所示, 圖 3-12 SMS 透鏡架構模擬圖 我們可以發現利用這組初始條件算出來的光學模組總長度為 3.56 公分,寬度為 4.13 公分,其 ray-fan 示意圖和光強度分布圖則分別如圖 3-13(a)及圖 3-13(b)所示。 35.6 mm 41.3 mm 2.3 mm
Z
Y
X
Lens
LED
36 圖 3-13(a) SMS 透鏡 ray-fan 示意圖 圖 3-13(b) SMS 透鏡光場分布圖 將模擬出來的光強度分布圖與 LED 未加光學結構的 Lambertian 光場分布圖 (圖 3-14)做一比較後,可以明顯看出 LED 在正負 50 度內所發出的光線都能被有 效收集到正負 2.5 度內,故模擬結果仍符合當初 SMS 預設條件的運算結果,不過 大於 50 度以外的光卻被浪費,亦即此架構無法完全將 LED 的出光完全收進透鏡 內,此時,可利用一 CPC 反射罩將大角度的光線收入透鏡內,示意圖如圖 3-15(a), 但如此一來則必頇放寬 LED 長度大小(Size,S)的條件,這樣才能保證由 CPC 反射 至透鏡的光能有效收在預設的角度內,示意圖如圖 3-15(b), 圖 3-14 LED 光場分布圖 Lens LED W2
Z
Y
X
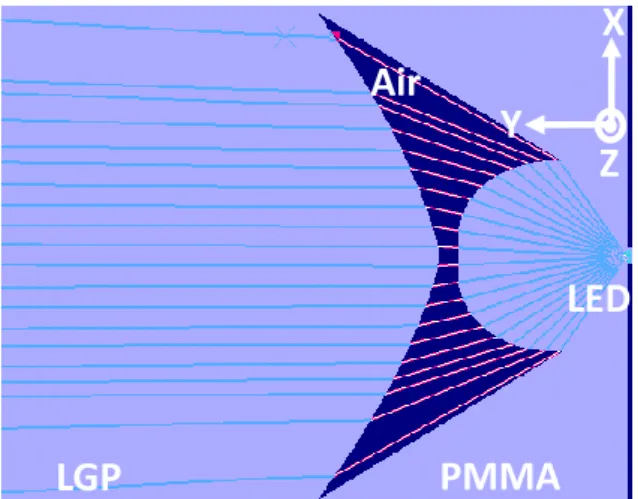
37 圖 3-15 (a) CPC 大角度收光示意圖 (b) CPC 限制條件示意圖 其中綠色虛線表示 CPC 反射罩的位置,而紅色虛線則是一開始要代入 SMS 流程 的初始條件,意即我們可以透過E1和E2 這兩個虛擬的點光源,藉由放寬 LED 大 小的初始條件,同時增加透鏡收集光線的角度,使得我們可以在不影響出光角度 的前提下,得以建置 CPC 於透鏡架構之中,但這種利用增加 LED 大小的方式很明 顯會讓邊界變寬鬆,光學模組的總長度(Total length of the module,T)也會跟著變 長,而為了避免這種情形發生,我們提出了一種利用逆介質光機架構的解決方案。 3.2.3 逆介質系統測試 所謂的逆介質架構是將傳統光線的傳遞路線顛倒過來,意即光線不是從空氣 進入到介質,而是從介質進入空氣來改變其行進方向,使得光線考慮介面的順序 變成要逆向思考,示意圖如圖 3-16,如此一來便能控制 LED 出光角度在較小的範 圍內,而 SMS 設計的收光角度(Receiving angle,0)也能因此變小。
38 圖 3-16 逆介質 SMS 架構示意圖 接著我們仍以現有的 LED 作為模擬光源,其大小為 2.3 mm * 0.5mm * 0.5mm,目標波前的出光角度設在正負 2.5 度,限制條件中和前面非成像系統測 試唯一不同的地方在於 LED 的出光角度可放寬至正負 90 度,也就是說 SMS 設計 的收光角度只要大於 1 1 sin ( ) c n 即可,以一般 PMMA 的材料為例,此時只需設 在 critical angle 1 1 sin ( ) 42.155 1.49 o c ,然後將條件代入上述 SMS 流程做計 算,即可得一組曲面解,其結構示意圖如圖 3-17, 圖 3-17 逆介質架構模擬圖 其 ray-fan 示意圖和光強度分布圖則分別如圖 3-18 和圖 3-19 所示,
LED
Air
PMMA
PMMA
Z
Y
X
64 mm 40.8 mm 2.3 mm39 圖 3-18 逆介質 ray-fan 示意圖 圖 3-19 逆介質架構之光場分布 不論是從光場分布圖或示意圖中都可以發現出光角度大多落在正負 2.5 度內,且 此時元件的收光角度可接收 LED 正負 90 度的出光,意即利用這樣的架構,可使 設計元件在相同的收光角度(0)下,LED 進光比例大幅增加,故理論上元件整體 效率容易比一般透鏡來得高,此外,跟前面透鏡結構比較起來,逆介質架構的透 鏡元件還能直接結合導光板,示意圖如圖 3-20。
Z
Y
X
Z
Y
X
Air
Air
PMMA
PMMA
LED
LED
40
圖 3-20 逆介質結合 LGP 架構示意圖
3.3 二次光學架構特性分析
為了進一步了解 SMS 計算流程中各個參數條件之間的關係,我們將主要參 數分成下列幾項來討論,其中包括:LED 光源的大小(Size,S)、光學模組的總長 度(Total length of the module,T)、光學元件的收光角度(Receiving angle,0)和目 標波前的出光角度(Convergence angle,1)等,這些參數條件的特性不僅是構成 SMS 曲面架構的主要元素,也可做為之後相關延伸設計的參考資料,本節將考慮 一般的非成像系統以及逆介質系統,並分別對其參數加以分析,其參數示意圖如 圖 3-11 和圖 3-16 所示。 3.3.1 透鏡架構的非成像系統 首先固定光學元件的收光角度和 LED 的大小,考慮光學模組的總長度和目標 波前出光角度之間的關係,如圖 3-21 所示,可發現到當限制的出光角度越小, 光學模組的總長度也會隨之變長,且兩者成非線性負相關,關係式可用數值方法 逼近寫成式子(3.13),
Air
PMMA
LED
Z
Y
X
LGP
41 圖 3-21 出光角度與模組長度關係圖 -1.005 1 0 1 1 ( , , ) ( ,50, 2.3) 90.055* T S T (3.13)
其中以 T 代表 Total length of the module,S 則表示 LED 的 Size,接著,我們固定 目標波前的出光角度和光源大小,考慮元件收光角度和光學模組總長度之間的關 係,示意圖如圖 3-22,可看出兩者間有一非線性正相關,同樣也可以用數值方法 將關係式寫成式子(3.14), 圖 3-22 收光角度與模組長度示意圖 2 1 0 0 0 0 ( , , ) (2.5, , 2.3)0.0059* 0.3336* 37.381 T S T (3.14)
42 最後考慮的變數是 LED 的大小(Size,S)對 SMS 透鏡設計的影響,我們選擇了其中 三種 LED size 做為模擬的參數,分別是 2.3 mm、10.3 mm 以及 18.3 mm 大小的 LED,接著將參數代入上述 SMS 計算流程,得到了三組出光角度和光學模組總長 度之間的關係圖以及其數值解,如圖 3-23 所示,數值解如式子(3.15)和式子(3.16) 圖 3-23 不同 LED 大小間模組長度和出光角度的關係 -0.963 1 0 1 1 ( , , ) ( ,50,10.3) 380.05* T S T (3.15) -1.004 1 0 1 1 ( , , ) ( ,50,18.3) 697.86* T S T (3.16) 可以發現當選擇的 LED 大小變大時,此架構下設計出來的 SMS 透鏡模組也會隨 之變長,但 LED 大小變化和模組長度兩者間並非線性相關,此外,經由測試計算 1 0 ( , , ) T S 中的三項參數後,可整理出模組長度和參數間的關係表(表 3-1)。 表 3-1 模組長度和參數間的關係表 相關性 LED 大小(S) 元件收光角度(0) 波前出光角度(1) 模組長度(T)
+
+
-
43 3.3.2 逆介質透鏡架構的非成像系統 現在,同樣的測試流程也適用在逆介質架構,我們在逆介質條件下分別測試 了T( , 1 0, )S 與其三項參數間的關係,首先是元件收光角度和模組長度,如圖3-24 所示,數值逼近如式子(3.17), 圖 3-24 逆介質收光角度和模組長度關係圖 2 1 0 0 0 0 ( , , ) (2.5, , 2.3)0.0103* 0.5861* 38.919 T S T (3.17) 接著是波前出光角度和模組長度的測試,關係圖如圖 3-25,式子則表示成(3.18), 圖 3-25 逆介質出光角度和模組長度關係圖 -1.006 1 0 1 1 ( , , ) ( , 42.155, 2.3) 88.396* T S T (3.18)
44 最後是 LED 大小和模組長度的計算,此時 LED 大小分別取在 2.3 mm、6.3 mm 和 10.3 mm,如圖 3-26 所示,關係式可寫成式子(3.19)和式子(3.20), 圖 3-26 逆介質中不同光源大小間關係比較圖 -0.852 1 0 1 1 ( , , ) ( , 42.155, 6.3) 177.24* T S T (3.19) -0.837 1 0 1 1 ( , , ) ( , 42.155,10.3) 286.68* T S T (3.20) 經過T( , 1 0, )S 三項參數的測試後,結果得到了幾乎和一般透鏡架構相同的趨勢 關係,不過,這邊值得注意的是,我們在逆介質透鏡下,元件收光角度的測試只 需考慮到 1 0 1 sin ( ) 42.155 1.49 o c 即可,意即同樣的測試條件跟一般透鏡相 比,元件收光角度可收到 LED 正負 90 度的光場,超越了一般透鏡的正負 50 度, 除此之外,若將兩種架構做個對照,還能發現逆介質架構雖然收光角度比一般透 鏡大,但在其他條件均相同下的模組長度卻沒有大幅增加,如式子(3.21)和式子 (3.22)所示, -1.005 1 0 1 1 ( , , ) ( ,50, 2.3) 90.055* T S T (3.21) -1.006 1 0 1 1 ( , , ) ( , 42.155, 2.3) 88.396* T S T (3.22)
45 最後,我們利用 Fresnel loss 公式(3.23)將這兩種二維曲面做簡易的效率計算,並 透過 LighttoolsTM模擬,來驗證逆介質系統是否真具有較高的光學效率,比較兩 種架構效率的差異,示意圖如圖 3-27 所示, 2 cos cos cos cos cos cos cos cos 1 1 t i i t i t t i i i t t i i t t n n r n n n n r n n T R r (3.23) 圖 3-27 模擬比較效率的兩光學架構 其中光學效率的計算流程是從 LEDSMS 下曲面 SMS 上曲面LGP,故模擬如 圖 3-27 所示,接著把算出來的 SMS 曲面代入式子計算後,可將逆介質和一般透 鏡兩者效率的比較整理成下表(表 3-2),
Z
Y
X
Z
Y
X
PMMA
PMMA
PMMA
Air
Air
Air
PMMA
LED
LED
46 表 3-2 逆介質和一般透鏡兩者效率比較表 1 0 ( , , ) T S 1 0 S 光學效率比 一般透鏡系統 3.56 cm 2.5o 50 o 2.3 cm 0.727 逆介質系統 4.08 cm 2.5 o 90 o 2.3 cm 1 從表 3-2 中數據可看出逆介質系統在收光角度遠大於一般透鏡的情形下,的確具 有較佳的光學效率,但此時仍會犧牲掉些許的模組長度,而此光學效率比和 Lambertian 光源直接做角度積分的值是很接近的,如式子(3.24)所示,故可推測 兩者在 SMS 曲面上的 Fresnel loss 差異並不大! (3.24) Flux in air lens configuration
47
第四章 方向性背光模組
本章將利用前章所設計出來的準直性背光光源的二次光學機構,運用同步多 曲面演算流程及其光學機構的特性,考慮入多光源和側光式背光的設計條件,使 得設計出來的光學機構能藉由軸上與離軸的光源切換,提供面板適當的角度變 化,進而達到寬窄視角切換的目的,並同樣利用光學模擬軟體 LighttoolsTM做理 論計算上的驗證,在較佳的方向性光場分布和背光出光效率的條件下,找到側光 式方向性背光的最佳光學機構。 本章目錄: 4.1 方向性背光原理 4.2 模擬驗證與分析 4.1 方向性背光原理 本研究利用傳統的側光式背光模組配合具有指向性的光源,使得面板出光能 控制在特定角度內,亦即當光線在進入導光板傳遞時具有方向性,則若此時將導 光板垂直並排,就能在導光板出光的水帄方向上得到以某特定角度為主的光場分 布,接下來,我們會用示意圖佐以主光線追跡的推導式子來做方向性背光原理的 細部說明。 以傳統側光式 LED 背光系統為例,當光線進入一二維的二次光學架構後如圖 4-1 所示,會在xy帄面上改變光線的傳遞,意即在 LGP(Light guide plate)內光線往 特定方向傳遞,則此時光線傳遞的單位向量可以式子(4.1)來表示,48 圖 4-1 側光式 LED 背光架構 Rayax b y cz , b const a (4.1) 其中Ray是光線在 LGP 中傳遞的方向,a 、b和 c 則分別表示光線在 x 、y和 z 方 向上的分量,此外,我們在 LGP 一側做上二維的 V-cut 微結構的反射面,讓光線 得以藉由 V-cut 反射出 LGP 外,俯視圖和側視圖分別如圖 4-2(a)和圖 4-2(b)所示, 光線經反射後的單位向量表示式則如式子(4.2), 圖 4-2 (a)側光式背光與微結構俯視圖 (b)側光式背光與微結構側視圖 Ray Ray n Ray Ray (4.2) 其中n為 V-cut 表面的單位法向量,若以一個 45 度 V-cut 切角來看,此時n可表 示成式子(4.3),
49 1 1 2 2 n y z (4.3) 反射後光線 Ray的表示式則寫成式子(4.4), ( ) ( ) 2 2 K K Raya x b y c z ax b y c z (4.4) 其中, 2( ) K RayRay b c (4.5) 而從反射後光線 Ray的表示式(56)中,可以發現光線在 x 方向上的分量是不變 的,意即光線在 LGP 中傳遞之前就已經被二次光學的出光所決定,故二次光學架 構對於 x 向量的影響決定了 LGP 出光後光線在 x 方向上的分量大小,接著,為了 利用此一光學架構的特性,我們再以旋轉 90 度後的視角來觀察整個側光式架 構,示意圖如圖 4-3, 圖 4-3 側光式架構之 X-Z 帄面圖 其中2定義為光線在 x z 帄面上出光的發散角,可看出利用這種架構使光線偏 折的特性正與方向性背光的設計理念不謀而合,故我們將以這樣側光式機構的排 列做為方向性背光的基礎,如圖 4-4 所示,其方向性實際應用的示意圖則如圖 4-5 所示,
50 圖 4-4 側光式架構旋轉排列 圖 4-5 方向性背光應用示意圖 因此,我們可以從上述光追跡的式子和圖中發現,為了利用此架構達到方向性背 光的目標,必頇先設計出一光學元件使 LED 傳遞至 LGP 的光線具有方向性,而這 正好運用了第三章準直背光元件的設計概念,配合上側光式機構的特性,即能藉 由軸上和離軸的多光源切換達到背光多視角切換的目的。 4.2 模擬驗證與分析 為了驗證此一想法的可行性,我們利用第三章算出來的 SMS 曲面,其參數 條件為T( , 1 0, )S T(2.5,50, 2.3)3.56(cm ,並用) LighttoolsTM模擬軟體建立一側 光式背光模組,示意圖如圖 4-6 所示,其 LighttoolsTM模擬實驗架構則如圖 4-7,
51 圖 4-6 側光式背光 LGP 出光角度示意 圖 4-7 模擬驗證的側光式背光模組 接著,先測試中間原始 LED 光源的出光狀況,理論上 LGP 出光發散角2會受 SMS 透鏡1的條件限制,亦即經過 V-cut 反射後,出光仍應要在正負 2.5 度內,其光 強分布的模擬結果如圖 4-8 所示, 圖 4-8 LGP 出光強度分布圖 可以發現 LGP 出光的發散角2的確大部分都被控制在正負 2.5 內,接下來為了增 加 LGP 出光的發散角2,我們選擇用 LED 離軸排列的方式來增加出光角度1的 分布,分別以原始 LED 的光軸為原點,在光軸對稱的兩側陸陸續續放置了多顆 LED,藉此來測試此架構的分光可行性,其中,為了使分光效果得以凸顯出來, 每個分光的間距都設計在 10 度以上,而 LED 放置的位置則以逆向的光線追跡來 確認。