1
國 立 交 通 大 學
電子工程學系 電子研究所碩士班
碩 士 論 文
一個適用於多頻帶快速鎖定的突發式
時脈與資料回復電路
A Multi-Band Burst-Mode Clock and Data
Recovery Circuit
研 究 生 : 陳育祥
指導教授 : 陳巍仁
中華民國九十九年十一月
2
一個適用於多頻帶快速鎖定的突發式
時脈與資料回復電路
A Multi-Band Burst-Mode Clock and Data
Recovery Circuit
研 究 生:陳育祥 Student : Yu-Hsiang Chen 指導教授:陳巍仁 Advisor : Wei-Zen Chen
國立交通大學
電子工程學系 電子研究所 碩士論文
A Thesis
Submitted to Department of Electronics Engineering and Institute of Electronics College of Electrical and Computer Engineering
National Chiao-Tung University in Partial Fulfillment of the Requirements
for the Degree of Master
in
Electronics Engineering November 2010
Hsin-Chu, Taiwan, Republic of China 中華民國九十九年十一月
i
一個適用於多頻帶快速鎖定的突發式
時脈與資料回復電路
研究生:陳育祥 指導教授:陳巍仁教授國立交通大學
電子工程學系電子研究所碩士班
摘要
積體電路技術的快速進步早已經鞭策著低價又便宜的寬頻存取 服務的發展,對於發展經濟型高速的光纖用戶網路來說,以被動光纖 網路為基礎的光纖到家系統被認為是前景一片看好的。在被動光纖網 路中,時脈與資料回復電路(CDR)在收發機裡扮演一個非常重要的角 色,且此種收發機可以應用在許多的通訊系統裡,比如光纖通訊和平 面顯示器介面等。因此,在此應用中,如何實現一個具有快速鎖定的 脈衝式時脈與資料回復電路是一個關鍵性的課題。此外,如何利用較 便宜的互補式金屬氧化半導體製程來實現高速的時脈與資料回復電 路將是可以用相對較低的成本而達到更高傳輸頻寬的不二法門。 在通訊系統中,通常接收端接受到的資料都是非同步的,並且受 到了雜訊干擾使得資料失真,所以在接收端中的時脈與資料回復電路 必頇從資料中萃取出時脈的資訊,並利用此資訊將輸入的資料作重新 萃取的動作,以便減少錯誤率。除此之外,為了使傳輸的效益更大,ii
在 Gigabit PON (GPON)的系統中要求 CDR 能夠快速的鎖定,而由於本 設計的時脈與資料回復電路主要達到快速鎖定為目的,因此快速鎖定 為本晶片設計的重點之一。 本電路設計主要實現一個閘式壓控振盪器為基準的突發式時脈 與資料回復電路,利用數位鎖頻迴路去鎖定閘式壓控振盪器頻率,再 交給閘式壓控振盪器電路進行快速相位的重置,和資料與相位的鎖定, 此電路所提出的閘式壓控振盪器採 1/7 速率的操作,也就是在一個時 脈週期之內有七筆傳送資料,進而達到高速操作及低功率消耗之目的, 且利用多模數的除頻器使此電路可以應用在不同頻帶,資料傳送方式 為 序 列資 料 輸入 晶片 解多 工 成七 筆並 列 資料 輸出 , 此電 路採 用 TSMC-90nm CMOS 製程技術,操作電壓為 1.2V,總面積為 1.162 x 1.205mm2,當資料頻率為 622.16Mbps、1244 Mbps、2488 Mbps、4977 Mbps 和 7Gbps 時,總功率消耗分別為 1.5 毫瓦、3 毫瓦、6 毫瓦、12 毫瓦和 17 毫瓦。
iii
A Multi-Band Burst-Mode Clock and Data
Recovery Circuit
Student: Yu-Hsiang Chen Advisor: Wei-Zen Chen
Department of Electronics Engineering & Institute of Electronics
National Chiao-Tung University
Abstract
The rapid progress in integrated circuit (IC) techniques has spurred the development of low-cost and convenient broadband access services.
Fiber-to-the-home (FTTH) system based on passive optical network (PON) is considered as a promising technology for deploying economically high-speed subscriber networks. In the passive optical network, clock and data recovery (CDR) circuit plays an important role in the transceiver. The application of the communication system such as passive optical network (PON) and FPD-Link suits this transceiver. Thus, how to realize a burst-mode CDR with rapid lock time is a critical issue in this application. Besides, implementing the high speed CDR in an
iv
inexpensive CMOS technology is the key to enable higher bandwidth communications at a relatively lower cost.
For communications, the data at the receiver is usually asynchronous, and it suffered distortion by noise and jitter. A clock and data recovery circuit at the receiver senses the data and produces a periodic clock, and retimes the input data by using the produced periodic clock to reduce the bit error rate. For higher efficiency of transmission, Gigabit PON specifications have only constraints on lock time, and this design exhibits instantaneous response.
A gated voltage-controlled oscillator based burst mode clock and data recovery circuit is presented. The frequency of gated voltage-controlled oscillator is locked by using the digitally assisted frequency locked loop, and then the gated voltage-controlled oscillator takes over to achieve instantaneous phase re-align and the received data with clock synchronization. The 1/7-rate gated voltage-controlled oscillator is presented. There are seven transmitted data within a periodic clock in order to achieve high speed operation and low power consumption. It can cover multi-band by using the truly modulus programmable divider, and the type of the data transmission is serial in parallel out. Implemented in a 90nm CMOS technology, the area is 1.162x1.205 mm2 including PAD, The chip consumes 1.5 mW, 3 mW, 6 mW, 12 mW and 17 mW when the data rate are 622.16Mbps, 1244Mbps, 2488Mbps, 4977Mbps and 7Gbps from 1.2V supply.
v
致謝
歷經三年多的時間,從一開始連 CDR 是什麼都搞不清楚,到這 本論文的完成,實在很感謝我的指導教授,陳巍仁老師的帶領。在此 過程,無論是在專業領域以及待人處世,都讓我受益匪淺。 在這段漫長的研究生涯,特別感謝本實驗室-台祐學長、世豪學 長在量測上的幫助,唯有你們的幫助,才有本論文的誕生。也感謝塔 哥、歐陽、彥緯、小賴、順天、凱悌、邱神、昕爺、Adair、小芸芸、 敬程、阿良、阿綸、溫董、翁姐還有本實驗室的新血秀樺、書謹、旻 毅、文杰、健軒、川逸、豔婷、建宏、逸弘、仲廷、曜嘉、佩妤、政 豪和弘凱,以及郭老師實驗室的同學與學弟…等。由於你們的陪伴以 及幫忙,帶給我許多的方便以及快樂的回憶,祝福你們未來在工作或 學業上都能夠一路順風,而還沒畢業的學弟妹能早日畢業。 另外,也特別感謝在背後默默支持我的家人和女友雅琪,在這段 期間對與我的關懷和付出,讓我可以無後顧之憂完成碩士學位。 陳育祥 Nov., 2010vi
目錄
摘要 ... i Abstract ... iii 致謝 ... v 目錄 ...vi 圖目錄 ... ix 表目錄 ... xiii 第一章 簡介 ... 1 1.1 相關背景與動機 ... 1 1.2 被動光纖網路簡介 ... 2 1.3 規格 ... 5 1.3.1 資料速率 ... 5 1.3.2 鎖定時間 ... 6 1.3.3 抖動特性 ... 7 1.3.4 上傳傳輸的眼圖遮罩... 7 1.4 時脈資料回復電路目標規格 ... 8 1.5 組織架構... 9 第二章 突發式時脈與資料回復電路種類 ... 10 2.1 鎖相迴路突發式時脈與資料回復電路 ... 10 2.2 超取樣式時脈與資料回復電路 ... 15 2.3 閘式壓控振盪器突發式時脈與資料回復電路... 18 2.4 比較 ... 20vii 2.4.1 資料速率和鎖定時間 ... 21 2.4.2 功率和面積 ... 23 2.4.3 抖動特性 ... 24 2.5 總結 ... 29 第三章 一個多頻帶突發式時脈資料回復電路 ... 31 3.1 系統架構... 31 3.2 來自閘式壓控振盪器訊號自身的干擾 ... 33
3.2.1 訊號自身的干擾 (ISI Inter-Symbol Interference) ... 33
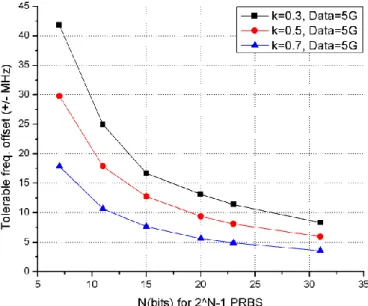
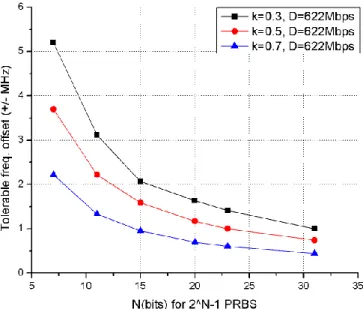
3.2.2 閘式壓控振盪器的結構 ... 34 3.3 提出的閘式壓控振盪器 ... 36 3.3.1 結構... 36 3.3.2 操作... 37 3.4 並行同步輸出解多工電路... 40 3.5 頻率檢知器之原理和設計... 41 3.6 十六位元上、下數計數器... 43 3.7 電流式數位類比轉換器 ... 45 3.8 和差調變器 ... 48 3.9 多模數除頻器 ... 49 3.10 電路設計與模擬結果 ... 51 3.10.1 數位控制振盪器 ... 51 3.10.2 數位校正鎖頻迴路 ... 57 3.10.3 閘式壓控振盪器突發式時脈與資料回復電路 ... 59 3.10.4 閘式數位控制振盪器頻率容忍度分析... 62 第四章 佈局與量測結果 ... 66
viii
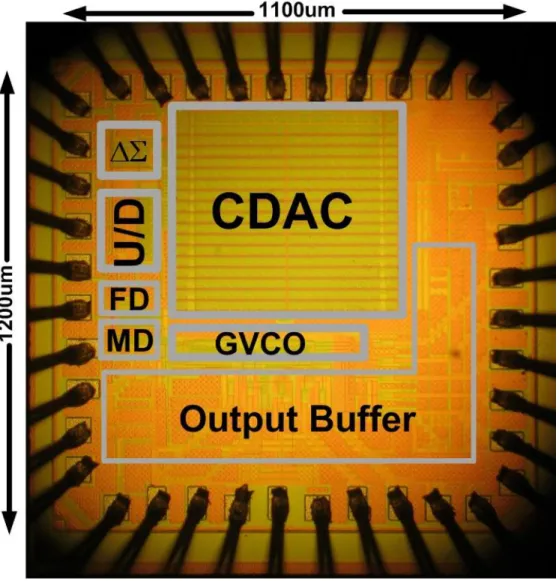
4.1 晶片佈局(Chip Layout)... 67
4.2 量測環境(Measurement Setup) ... 68
4.3 量測結果(Measurement Results) ... 69
ix
圖目錄
圖 1 時脈與資料回復電路的示意圖... 2 圖 2 千兆位元乙太光纖被動網路系統基本架構 ... 4 圖 3 突發式傳送、接收機架構 ... 5 圖 4 傳統時脈與資料回復電路系統... 11 圖 5 具有參考時脈訊號的時脈與資料回復電路系統... 12 圖 6 鎖相迴路突發式時脈與資料回復電路系統 ... 13 圖 7 反及閘所構成的振盪器 ... 13 圖 8 控制狀態圖... 14 圖 9 超取樣式時脈與資料回復電路架構 ... 15 圖 10 超取樣式時脈與資料回復電路時序圖... 16 圖 11 超取樣式時脈與資料回復電路控制邏輯最大周期數 C ... 18 圖 12 閘式壓控振盪器突發式時脈資料回復電路 ... 19 圖 13 閘式壓控振盪器突發式時脈資料回復電路時序圖 . 20 圖 14 相位資訊的平均 ... 26 圖 15 最好的相位... 26 圖 16 相位追蹤過程 ... 27 圖 17 系統架構圖... 32 圖 18 訊號自身的干擾 ... 34 圖 19 兩個閘式壓控振盪器所構成架構 ... 35 圖 20 邊緣檢測器閘式壓控振盪器所構成架構 ... 36x 圖 21 1/7 資料速率閘式壓控振盪器電路架構... 37 圖 22 操作時序圖... 38 圖 23 閘式壓控振盪器控制電路 ... 39 圖 24 閘式壓控振盪器延遲單元 ... 39 圖 25 並行同步輸出解多工電路 ... 40 圖 26 同步輸出並行解多工資料電路時序圖... 41 圖 27 頻率檢知器電路架構圖 ... 42 圖 28 計數模式 ... 42 圖 29 鎖定偵測器... 43 圖 30 上、下數控制訊號產生器 ... 43 圖 31 十六位元上、下數計數器 ... 44 圖 32 電流式數位類比轉換器 ... 46 圖 33 佈局示意圖... 47
圖 34 象限錯排 & Dummy Cell ... 47
圖 35 二階 MASH 信號方塊圖 ... 48 圖 36 二階 MASH 電路圖 ... 49 圖 37 雙模前置除頻器式多模數除頻器 ... 50 圖 38 多模數除頻器基本架構 ... 51 圖 39 寬除數範圍多模數除頻器 ... 51 圖 40 數位閘式壓控振盪器簡易區塊圖 ... 52 圖 41 數位控制振盪器量化雜訊模型 ... 53 圖 42 壓控振盪器的相位雜訊模擬結果 ... 54 圖 43 十四相位輸出暫態圖 ... 55 圖 44 量化雜訊的相位雜訊 ... 55
xi 圖 45 Dithering 效應的相位雜訊 ... 56 圖 46 量化誤差&Dithering 效應對相位雜訊的影響 ... 56 圖 47 頻率對數位碼的轉移曲線 ... 57 圖 48 數位校正鎖頻迴路示意圖 ... 57 圖 49 數位校正鎖頻迴路模擬結果... 58 圖 50 頻率誤差對時間關係圖 ... 58 圖 51 突發式系統快速相位的校正模擬圖 ... 59 圖 52 鎖定時間模擬圖 ... 60 圖 53 序列資料為 7Gbps 的抖動量表現 ... 61 圖 54 不同頻段的功率消耗圖 ... 61 圖 55 分析頻率偏移的容忍度 ... 62 圖 56 頻率容忍度的偏移量@5Gbps ... 65 圖 57 頻率容忍度的偏移量@3.5Gbps ... 65 圖 58 頻率容忍度的偏移量@622Mbps ... 66 圖 59 晶片照相圖... 67 圖 60 (a)AC 印刷電路板(b)DC 印刷電路板 ... 68 圖 61 量測環境 ... 69 圖 62 數位碼對頻率的關係圖 ... 70 圖 63 量測 100Mbps 解多工資料的眼圖 (27-1)... 70 圖 64 量測 100Mbps 解多工資料的眼圖 (231-1) ... 71 圖 65 量測回復時脈頻率 100MHz ... 71 圖 66 量測 500Mbps 解多工資料的眼圖 (27-1)... 72 圖 67 量測 500Mbps 解多工資料的眼圖 (231-1) ... 72 圖 68 量測回復時脈頻率 500MHz ... 73
xii 圖 69 量測 700Mbps 解多工資料的眼圖 (27-1)... 73 圖 70 量測 700Mbps 解多工資料的眼圖 (231-1) ... 74 圖 71 量測回復時脈頻率 700MHz ... 74 圖 72 量測鎖定時間當資料速率為 2500Mbps ... 75 圖 73 量測鎖定時間當資料速率為 5000Mbps ... 75 圖 74 四個通道輸出波形 ... 76
xiii
表目錄
表格 1 資料速率的規格 ... 6 表格 2 鎖定時間的規格 ... 7 表格 3 上傳傳輸的眼圖遮罩 ... 8 表格 4 目標規格表 ... 9 表格 5 突發式獲得的可靠度 ... 23 表格 6 功率和面積 ... 24 表格 7 抖動特性... 24 表格 8 總結比較表 ... 30 表格 9 不同頻段的抖動量表現 ... 61 表格 10 本晶片效能摘要表 ... 771
第一章
簡介
1.1 相關背景與動機 隨著科技的發展,通信在現今世界變得越來越重要。在我們每天 日常生活中時時刻刻交換著數不清的訊息,對於一個傳送者而言,傳 送訊息必頇轉換成訊號然而傳送到接收端,再接收端的接收者必頇把 訊號再轉換成訊息。這個過程成不成功主要依賴於傳送機跟接收機的 特性好壞。事實上傳送機和接收機都需要一個時脈去處理資料,所以 接收機必頇從輸入資料中去萃取時脈訊號使得電路得以同步工作。 因此在有線通訊系統裡,時脈與資料回復電路(CDR)是構成接收 機的一個方塊,像是同步光網路(Synchronous Optical Networking)、千 兆位元乙太網路(Gigabit Ethernet)、千兆位元被動光纖網路(GPON)和 乙太被動光纖網路(EPON),等等。如圖 1 所示為時脈與資料回復電 路的示意圖,一個位於接收機的時脈與資料回復電路被使用於重建時 脈資訊,因為接收機接收到的時脈資訊通常非同步和受到雜訊干擾, 因此此時需要一個乾淨且同步的時脈為了接收機的同步操作。接收到 的資料通常需要做重建以消除在傳輸過程中的抖動累積,通常評估一 個接收機的好壞,時脈與資料回復電路佔了一個很重要的角色所以必 頇要很小心的設計。2 D Q Clk Rx Data CDR Recovered Clock Recovered Data 圖 1 時脈與資料回復電路的示意圖 就如上述所提到的,時脈與資料回復電路是構成有線通訊系統很 重要的一個方塊特別是在光纖網路裡。回顧一下網路的拓撲,光纖網 路可以被區分為點對點和點對多點系統,當然點對點和點對多點系統 都需要一個可以回復時脈和資料的接收機。然而對於不同的應用,對 時脈與資料回復電路的規格需求也不相同。 1.2 被動光纖網路簡介 隨著電腦網路的蓬勃發展鞭策著寬頻存取服務往低成本的方向 發展,為了建構具有經濟效益的光纖到家服務(FTTH),被動光纖網路 剛好符合了這樣需求。早期發展的非同步傳輸被動光纖網路(APON)、 寬頻被動 光纖網路 (BPON)和乙太被動光纖網路 (EPON)傳輸速度約 50-600Mb/s,近年來千兆位元乙太網路(Gigabit Ethernet)在用戶端傳 輸速率可高達 1Gbps 以上已被廣泛的注意。 如圖 2 所示是千兆位元乙太被動光纖網路(GEPON)系統的基本 架構 [1],在 IEEE 802.3ah [2]委員會已經被制定成標準。被動光纖網 路傳輸系統主要在光纖終端機(OLT)和多點的光纖網路用戶端(ONUs)。 多點的光纖網路用戶端(ONUs)主要分布在用戶的住宅區連接到光纖
3 終端機(OLT)透過一條光纖和樹狀的網路拓撲基於 1:N 的被動星狀光 耦合器,在光纖終端機(OLT)廣播序列的資料在這些資料的標頭檔標 籤著哪些用戶端(ONUs)需要接收到這些封包,使用 1490nm 的波長當 下載的傳輸。在用戶端(ONUs)從下載下來的封包萃取出時脈資訊,然 而頻率同步光纖系統。每一個用戶端(ONUs)依要求上傳突發式的封包 使用 1310nm 的波長。對於用戶端(ONUs)傳送的 1310nm 波長的突發 式資料使用分時多工的機制(TDMA)以致封包彼此不會互相干擾,因此 在下載方向(終端機到用戶端)被動光纖網路是以點對多點的方式傳輸, 在上傳方向(用戶端到終端機)是多點對單點的方式傳輸。顯而易見的 被動光纖網路有較低的成本。像這樣的拓樸介質存取控制(MAC)是一 個重要的問題,不同於點對點(P2P)傳輸網路或是curb-switched 網路, 被動光纖網路需要服務多數用戶但只有使用一條光纖和一個被動的 光耦合器,主要有三種方式去完成介質存取(Media Access),第一種方 式是分頻多工(WDM),是一個簡單的解法,但具有高成本的網路設備, 在終端機(OLT)和用戶端(ONUs)必頇具有可調的接收機或接收機陣 列。 CSMA/CD 是困難被實現的因為用戶端(ONUs)不能偵測到在終端 機(OLT)資料的干擾來自光耦合器的方向性。終端機(OLT)必頇偵測到 干擾然而發出警告訊號給用戶端(ONUs)然而在被動光纖網路的傳遞 距離可能超過 20 公里,這樣大大降低了傳輸效率。大部分的設計者 比較偏好分時的方式在光纖通道上傳遞和存取,此方式允許單一上傳 波長(1310nm)和單一在終端機(OLT)的傳送機大大提高了成本效益。 全部的用戶端(ONUs)同步到基準的參考時間,每一位用戶被分配 到不同的時間框架,每個時間框架可搭載一定量的乙太網路訊框,每
4 一個用戶端(ONUs)具有緩衝訊框直到下一個時間框架的抵達,當時間 框架到達時每一個用戶端(ONUs)使用通道最高速傳送儲存的訊框,如 果緩衝器上沒訊框則發出閒置的訊號,可存取的時間框架從靜態位置 到動態最適位置基於在用戶端(ONUs)瞬間的資料大小。 圖 2 千兆位元乙太光纖被動網路系統基本架構 被動光纖網路實體層相似於圖 3 所示,傳送機包括雷射驅動器 和雷射二極體然而接收機包含光二極體、放大器和時脈與資料回復電 路。為了區分上傳和下載使用了多工器,因為資料在上傳方向由眾多 的突發式被動光纖網路封包所構成,所以在接收端的終端機(OLT)和 傳送端的用戶必需允許突發式的操作模式。也就是說全部的區塊必需 在封包到達前就得到達穩定的狀態。像是突發式的轉導放大器(TIAs) 和突發式的時脈與資料回復電路(CDRs)。
5 Laser Driver LD CDR Post-Amp Burst-mode Receiver Pre-Amp PD WDM OLT Laser Driver LD CDR Post-Amp Burst-mode Transmitter Pre-Amp PD WDM ONU 4~64 ONUs 1310nm 1490nm 圖 3 突發式傳送、接收機架構 在傳統長距離光通訊網路,一個網路由多條的光纖和光耦合器連 接這些光纖,資料的傳送必頇經過好幾個中繼放大器,每個中繼放大 器由放大器和時脈與資料回復電路所構成。放大器放大且限制訊號的 擺幅以減輕雜訊對訊號的影響,使得時脈與資料回復電路重新取樣資 料時有乾淨的時脈訊號,然而這個時脈是由資料速率萃取出來的以減 輕雜訊在時間上的累積。 1.3 規格 為了更了解突發式時脈與資料回復電路,規格部份將在這節被討 論,兩個比較熱門的被動光纖網路:千兆位元乙太被動光纖網路 (GPON)和乙太被動光纖網路(EPON)。雖然這兩類在實體層有很多種規 格,在這節只有跟時脈與資料回復電路相關的規格將被提及,如資料 速率、鎖定時間,抖動特性和眼圖遮罩規格,有關上傳傳輸部分。 1.3.1 資料速率 下表表格 1 為不同光纖網路下的資料速率
6
PON Data Rate ( Mbps )
GPON 155.52 622.08 1244.16 2488.32 EPON 1000BASE-PX 1250 表格 1 資料速率的規格 1.3.2 鎖定時間 不同的資料速率對應到不同的鎖定時間,從表格 1 到表格 2 我 們可以觀察到傳統的接收機對於連續模式的傳輸有比較低的響應速 度,然而比較長的穩定時間並不適用於終端機(OLT)上,連續模式和 突發式模式的操作不同在於突發式模式接收機在鎖定時間上有比較 嚴格的規格,則連續模式傳輸方式則沒有,就現有的技術在突發式接 收機資料速率已經超過 20 Gbps [3]和 33Gbps [4]然而連續模式的接收 機已經超過 40Gbps [5]使用標準 CMOS 0.18um 製程技術,在此應用下 終端機(OLT)必需有突發式的接收機去接收突發式訊號。
PON Data Rate ( Mbps ) Bits Time ( ns )
GPON 155.52 10 64 622.08 28 44.8 1244.16 44 35.2 2488.32 108 43.2 EPON 1000BASE-PX 1250 500 400
7 表格 2 鎖定時間的規格 1.3.3 抖動特性 發展至今大部分比較熟悉的是連續模式的時脈與資料回復電路 比起突發模式,當提到突發模式的時脈與資料回復電路抖動特性是比 較讓人困惑的主題。 基本上來說抖動特性包含三個部分:抖動轉移函數(Jitter Transfer Function)、抖動容忍度(Jitter tolerance)和抖動產生量(Jitter generation)。 對於前面所提到連續模式時脈與資料回復電路被應用於一連串的資 料中繼放大器上去減低光纖傳遞上的周期性干擾,抖動的特性會沿著 資料傳遞的路徑而累積,所以顯而易見抖動規格必需很嚴格去降低傳 遞所累積的抖動量,例如 OC-192 或 IEEE 802.3ae [2]然而這些限制在 突發式的時脈與資料回復電路相關文獻上很少被看到。 對 於突發式時脈與資料回復電路因為應用於接收端的終端機 (OLT)上是上傳路徑的終點,抖動特性並不會被累積或放大。結論為 被 動 光 纖 網 路 時 脈 與 資 料 回 復 電 路 規 格 主 要 限 制 在 用 戶 端 (ONUs)(downstream)因為仍然是連續模式的操作,所以抖動特性對於 突發式的時脈與資料回復電路相關文獻會標為”N/A”。 1.3.4 上傳傳輸的眼圖遮罩 眼圖遮罩主要決定時脈與資料回復電路靜態相位誤差的極限如 表格 3 所示,幸運的是對大部分的資料與時脈回復電路架構這個遮 罩的規格並不難去達到。
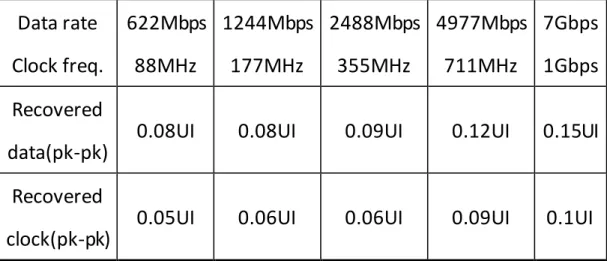
8 0.5 x3 x4 1 x2 x1 0 0 y1 y2 0.5 y3 y4 1 1+y1 155.52Mbps 622.08Mbps 1244.16Mbps 2488.32Mbps x1/x4 0.10/0.90 0.20/0.80 0.22/0.78 N/A x2/x3 0.35/0.65 0.40/0.60 0.40/0.60 N/A y1/y4 0.13/0.87 0.15/0.85 0.17/0.83 N/A y2/y3 0.20/0.80 0.20/0.80 0.20/0.80 N/A 表格 3 上傳傳輸的眼圖遮罩 1.4 時脈資料回復電路目標規格 根據被動光纖網路的規格,我們可以預設想要達到的目標規格對 於我們提出的突發式時脈與資料回復電路使用 CMOS 90nm 製程如表 格 4 所示。 This work Data rate 700Mbps~7000Mbps Process CMOS 90nm Power supply 1.2V Power 2.4mW/Gbps Die size 1.32 mm2
9
Jitter of the recovered clock & data 0.05-0.1UI & 0.08-0.15UI Locking time < 10 bits
BER <10e-12 表格 4 目標規格表 1.5 組織架構 本論文主要分五個章節,第一章,說明相關背景和動機;第二章, 介紹突發式時脈與資料回復電路的種類;第三章,簡介一下本論文所 提出的架構和設計考量;第四章,實驗結果和量測;第五章,結論。
10
第二章
突發式時脈與資料回復電路種類
事實上,時脈與資料回復電路已經發展了好幾十年了,表示有數 不盡的電路架構和種類發表在文獻中,隨著對頻寬的需求越來越大, 時脈與資料回復電路的操作速度相對會被提升。 實際上幾年前就有蠻多高資料速率的時脈與資料回復電路被提 出來 [6]-[10],但較少數著重在突發式時脈與資料回復電路因為被動 光纖網路還不是普及且可行的,因此大部分所提出的高速時脈與資料 回復電路主要貢獻和著重於同步光網路(SONET) [11][12],千兆位元乙 太網路或是其它光通訊 [13]。直到被動光纖網路的浮現,高速突發式 時脈與資料回復電路的規格才變成要去克服吸引人的課題。 雖然至今有許多文獻探討突發式時脈與資料回復電路,我們把它 概分為三個種類根據不同的架構,依序分別是:"鎖相迴路突發式時 脈與資料回復電路"(PLL-based BMCDR),"超取樣式時脈與資料回復電 路"(Oversampling-based BMCDR),"閘式壓控振盪器突發式時脈資料回 復電路"( GVCO-based BMCDR)。第一和第二類始於連續模式時脈與資 料回復電路但也可以應用於突發式時脈與資料回復電路,然而第三類 就是為了滿足突發式時脈與資料回復電路而設計的。 2.1 鎖相迴路突發式時脈與資料回復電路 一個傳統連續模式時脈與資料回復電路系統如圖 4 所示,它是 由相位偵測器(PD),低通濾波器(LPF),壓控振盪器(VCO),頻率偵測器 (FD)和決策電路(例如 D 型正反器)所構成,如圖 4 所示此架構包含了11 一個鎖相迴路外加一個鎖頻迴路在此系統之中。一個鎖相迴路在此系 統中是容易被了解的,但鎖頻迴路呢?在許多文獻上已被證明鎖相迴 路只能在壓控振盪器振盪頻率與資料速率偏移量在迴路頻寬內可以 正常工作,約為 MHz 等級。明顯的很難去設計一個 MHz 等級調諧範 圍的壓控振盪器,因此需要去設計一個鎖頻迴路去驅使壓控振盪器的 頻率在起始時接近資料速率。 圖 4 傳統時脈與資料回復電路系統 在起始時,鎖頻迴路驅使壓控振盪器的頻率接近資料速率然而把 控制權交給鎖相迴路,然而鎖相迴路調整回復時脈的相位對齊輸入資 料的相位,以至於相位 90 度的時脈在決策電路可以取樣到資料轉態 的中心點,以降低錯誤率(BER)。藉由取樣在資料傳輸序列裡雜訊還 有抖動的累積將會減少。 言歸正傳我們來探討傳統的時脈與資料回復電路用在突發式的 系統是否可行。首先從鎖頻迴路來觀察無論時脈與資料回復電路屬於 Bang-bang 種類或是線性種類,低通濾波器的電容都必需大於 100pF, 假設頻率偵測器輸出電流為 100uA,然而∆V 為 1V,然而穩定時間至 少為 ∆t =C × ∆V I = 100p × 1 100u = 1u sec
12 對於乙太被動光纖網路而言鎖定時間約為 400ns 然而對於千兆 位元被動光纖網路規格鎖定時間小於 64ns,可以看出傳統的鎖頻迴 路不能達到快速鎖定的需求。 一個簡易的方式去克服這個問題如圖 5 [14]所示,鎖頻迴路被另 外一個鎖相迴路所取代,這個額外的鎖相迴路可以預設壓控振盪器的 頻率根據參考時脈訊號,只要序列資料近來上半部的迴路將會接管整 個運作功能,當然為達到此目的只要可程式化的除頻器的除數 N 和 M 滿足下式: fVCO = N
M× Fref = data rate
圖 5 具有參考時脈訊號的時脈與資料回復電路系統 確認完鎖頻迴路後鎖相迴路必需鎖住輸入的序列資料滿足所想 要的規格,因為迴路頻寬大約為 MHz 等級,所以鎖相迴路約要 1us 去達到穩態,這部分跟傳統的有鎖頻迴路架構一樣,所以鎖相迴路部 分必頇稍做修改使可以操作在快速鎖定。 一個可行的方式如圖 6 [15]所示,這裡先提到一些特別的組成方 塊以達到快速相位校正:閘式壓控振盪器(GVCO)、多工器(MUX)和控 制邏輯(Control logic)。
13 圖 6 鎖相迴路突發式時脈與資料回復電路系統 GVCO 是閘式壓控振盪器的縮寫,壓控振盪器是耳熟能詳的但閘 式壓控振盪器就不是那麼廣泛被使用到,閘式意指的是由一些控制邏 輯閘所構成的振盪器。舉例來說由反及閘所構成的振盪器如圖 7 所 示。從圖可以清楚的看到當 VCO_en 為高電位時閘式壓控振盪器就如 同一般五級的環型振盪器,反之當 VCO_en 為低電位時閘式壓控振盪 器會瞬間被關閉。簡單來說閘式壓控振盪器是一個可以被外部訊號停 止或啟動的壓控振盪器。 圖 7 反及閘所構成的振盪器 MUX 則為一般的多工器,多工器的輸出訊號控制低通濾波器, Control logic 則為有限狀態機決定要啟動上半部的迴路或是下半部的 迴路,他的有限狀態圖如圖 8 所示 [15],為了要了解此操作,我們 可以從”Data come”開始,當序列資料進來系統會送出一個”Burst”的 訊號如同圖 8 所示,給時脈與資料回復電路去告知控制邏輯有資料
14 接收進來了,當”Burst=1”之後只要遇到”Data low”閘式壓控振盪器將 會進入停止模式,只要又遇到”Data high”閘式壓控振盪器又會開始振 盪然後它的相位便會和資料相位相同,當”PD_en=1”就表示已經完成 上述之動作,將會獲得回復的時脈和資料且全部的鎖定時間約三個資 料位元時間。 圖 8 控制狀態圖 除此之外切換模式從追蹤參考時脈訊號到追蹤輸入的序列資料, 很重要的是切換過程是否是很緩慢的,如果不是閘式壓控振盪器的控 制電壓會受到干擾且下半部迴路必需花額外的時間再次達到穩態。因 為電路系統必需隨時準備要接收資料,控制邏輯電路必頇有責任去負 責緩慢的切換,否則將會干擾下一筆資料的接收。 從狀態圖可以逆推回去,當”Data over”後”Burst=0”閘式壓控振盪 器將會再度停止只要”Fref low”。當”Fref high”然而”VCO_en”訊號要保 證的是閘式壓控振盪器振盪訊號的相位和 Fref 同步。
15 它的優缺點將會在 2.4 節裡與其它種類做比較。 2.2 超取樣式時脈與資料回復電路 一個傳統超取樣式時脈與資料回復電路如圖 9 所示 [16][17],這 個架構可被分解成時脈與資料回復電路部分和鎖相迴路部分,當鎖相 迴路扮演時脈產生器的時候上半部迴路掌管了時脈與資料回復功 能。 圖 9 超取樣式時脈與資料回復電路架構 鎖相迴路部分是一個傳統的充電幫浦架構除了一個多相位的壓 控振盪器(MP-VCO),相位頻率偵測器負責比較參考時脈相位和經過除 頻器訊號的相位所產生的上升或下降訊號去控制充電幫浦,經過一個 低通濾波器去過濾掉高頻的成分,多相位的壓控振盪器(MP-VCO)的電 壓由相位頻率偵測器和充電幫浦所控制,最後振盪器的振盪頻率將為
16 穩定到參考時脈訊號的 N 倍,多相位的壓控振盪器(MP-VCO)的訊號 提供給在時脈與資料回復電路部分的數位電路所使用。 資料回復電路部分包含了取樣器”Samplers”、邊緣檢測器”Edge detector”和控制邏輯”Control logic”,在取樣器部分輸入的資料被多相 位的壓控振盪器(MP-VCO)所提供的相位做取樣的動作如圖 10 所示, 這個程序我們稱為超取樣。以這個例子來看,輸入資料被三倍超取樣, 意思是一筆資料被多相位的壓控振盪器(MP-VCO)所產生的三個不同 的相位訊號所取樣,為了減緩每個子電路速度的需求,多相位的壓控 振盪器(MP-VCO)採用 1/4 速率的操作所以要達到三倍超取樣共需要 多相位的壓控振盪器(MP-VCO)產生 12 個相位。 圖 10 超取樣式時脈與資料回復電路時序圖 使用取樣器的輸出結果讓邊緣檢測器偵測出資料的轉態點如圖 10 所示,邊緣檢測器的輸出為高準位時表示有資料轉態的發生;相 反的如果邊緣檢測器的輸出為低準位表示沒有資料轉態的發生。直覺 來說邊緣檢測器可以為互斥或閘陣列所構成。 隨著這些轉態點被標示出來,控制邏輯將會萃取出輸入資料的相
17 位資訊然後決定從多相位的壓控振盪器(MP-VCO)的三個相位時脈訊 號中取最佳的相位去當回復的時脈訊號,四組時脈訊號分別連接到四 組多工器,每一組時脈訊號由三個相位所構成。控制邏輯從三個相位 選其一去當回復時脈訊號使得資料錯誤率(BER)降到最低,在決策電 路方面,輸入資料被四組時脈訊號回復且解多工,因為最佳取樣相位 的時脈訊號被挑出去當回復的時脈訊號,所以從字面看來這個架構也 稱做相位挑選式時脈與資料回復電路。 為什麼此電路可以運用在突發式的系統上呢?我們來檢視此架 構的鎖定時間,從圖 9 來看訊號經過了取樣器、邊緣檢測器、控制 邏輯、多工器和決策電路。所以鎖定時間如下式所示:
TSamplers + TEdge + TControl + TMUX + TDecision
= 1 × TClock + 1 × TClock + 1 × TClock + 1 × TClock + 1 × TClock = (4 + C) × TClock = (4 + C) × R × TData 然而 TCl ock是時脈訊號的週期,TData是資料的位元寬度,C 代表的 是控制邏輯完成工作的周期,R 代表資料速率跟振盪頻率的比率。 明顯的,不同規格的鎖定時間和不同的頻率比率 R 將會影響到最 大的 C 值,它們的關係如圖 11 所示,根據圖 11 我們可以觀察到兩 個趨勢: (1) 愈高資料速率,控制邏輯所需最大周期數愈大 (2) R 值越高,控制邏輯所需最大周期數愈小 結論為,155Mbps 很難去滿足規格不論 R 值是多少,甚至其它三 個規格 R 值約為 2 或 4,要從數位電路的鎖定時間和速度去做折衷, R 值基本上設計為 4。因此愈快的鎖定時間需要複雜度愈高的數位電 路,暗指的是超取樣時脈與資料回復電路需要從鎖定時間和硬體複雜
18 度去做折衷,也表示超取樣時脈與資料回復電路會消耗過大的功率和 面積,此外,在充滿雜訊的環境,為了降低取樣相位和輸入資料的相 位誤差硬體複雜度將會提高,但這樣又不利於高速操作。 如 圖 11 所 示 此 架 構 適 合 突 發 式 GPON 622Mbps 、 GPON 1244Mbps 和 GPON 2488Mbps 的應用,對於 EOPN1000BASE 來說當 R 為 8 時最大的 C 值為 54 所以也可以滿足規格,不過任何架構都有其 優缺點我們將在 2.4 節做比較。 2 4 6 8 0 10 20 30 40 50 M a x C y c le s o f C o n tr o l L o g ic " C "
Data Rate to VCO Freq Ratio "R"
155 Mbps 622 Mbps 1244 Mbps 2488 Mbps 圖 11 超取樣式時脈與資料回復電路控制邏輯最大周期數 C (不同資料速率滿足 GPON 規格) 2.3 閘式壓控振盪器突發式時脈與資料回復電路 不同於鎖相迴路式和超取樣式突發系統的時脈與資料回復電路, 閘式壓控振盪器突發式時脈與資料回復電路架構本生就是因應突發 式系統而生,典型的架構如圖 12 所示 [18]。
19 圖 12 閘式壓控振盪器突發式時脈資料回復電路 這個架構也可以被分解成鎖相迴路部分和時脈與資料回復部分, 雖然鎖相迴路部分能然是傳統的架構,但振盪器由閘式壓控振盪器所 取代,就如前面所提到的閘式壓控振盪器是一個可停止和啟動的壓控 振盪器,這個部分是快速鎖定的關鍵,不同於超取樣式時脈與資料回 復電路架構的鎖相迴路部分是當時脈產生器,然而閘式壓控振盪器架 構的鎖相迴路部分是扮演電壓產生器的角色。去使”GVCOA”、”GVCOB” 振盪在想要的頻率,因為要提供適當的電壓才能使電路正常的工作, 因此在鎖相迴路部分的壓控振盪器可以被”GVCOA”和”GVCOB”所取代, 因為它的狀態永遠被設定為振盪模式換句話說也就是一般的壓控振 盪器。 接下來要討論時脈與資料回復電路部分,此部分最重要的區塊 為”GVCOA”、”GVCOB”和反或閘,這些的區塊也是快速鎖定的關鍵, 快速鎖定的過程也很簡單被了解,當輸入資料為高準位時”GVCOA”在 振盪模式而”GVCOB”則在停止模式;相反來說當輸入資料為低準位
20 時”GVCOB”在振盪模式而”GVCOA”則在停止模式,結論為不管輸入資 料為高準位或是低準位兩個閘式壓控振盪器會有其中一個在振盪模 式,而反或閘所扮演的角色為回復時脈結合器,時序圖如圖 13 所示, 簡單來說這些電路的延遲暫時的忽略。 圖 13 閘式壓控振盪器突發式時脈資料回復電路時序圖 但以實際上的情況來說每個電路的延遲必需被考慮進來當資料 速率快到 Gbps,所以如圖 12 所示的”Matching”區塊就扮演補償這些 延遲而存在。如果沒有”Matching”區塊將會產生明顯的靜態的相位誤 差介於資料和 0 度的時脈訊號,而使得 90 度的時脈訊號不能正確取 樣到資料的中心點,所以資料錯誤率將會提高許多,基本上而言這個 區塊由訊號路徑的複製延遲單元所構成。 2.4 比較 這個也許有失公平性,因為有些突發式時脈與資料回復電路不在 上述三個分類之中,它的架構有可能是其中兩個的綜合架構甚至是三 個,所以擁有不同的特性。所以這節只以一般架構去做比較和直覺的 觀察,因為我們的目的只是為了設計適合高速突發式時脈與資料回復
21 電路的應用且有良好的效率。 在第一章裡已經介紹有關突發式時脈與資料回復電路的規格且 只有鎖定時間和資料速率被提及為考量條件,除此之外功率消耗和晶 片面積也是重要的考量因素,雖然抖動的表現不在規格中,但這項特 性不能被忽略因為畢竟這是時脈與資料回復電路的基本。 2.4.1 資料速率和鎖定時間 在千兆位元被動光纖網路裡,最高的資料速率為 2488Mbps 代表 的意思為每個資料位元為 0.4ns,CMOS 製程技術發展至今時脈與資 料回復電路要操作在 40Gbps 使用 0.18um 的 CMOS 製程技術已經被 提 出 ,所 以 這三 類的 時脈 與 資料 回復 電 路架 構都 可 以輕 鬆達 到 2488Mbps 的資料速率不是問題。事實上,從鎖定時間這樣規格對於 突發式時脈與資料回復電路來觀察,甚至操作在 2488Mbps 都會是個 問題所以為什麼突發式時脈與資料回復電路發展高於 2.5Gbps 或是 10Gbps 在今日的文獻還不是那麼普及,所以資料速率和鎖定時間將 會在這小節一起提出來討論,因為資料速率可以被達到是從突發式資 料的獲得可靠度所決定,可靠度的定義為:快速相位追蹤機制的理想 度可以如何被達到。 回想起之前所提到的鎖相迴路突發式時脈與資料回復電路,閘式 壓控振盪器可以被停止,當輸入序列資料從高準位變低準位時,也可 以被啟動,當資料發生轉態時,所以輸入資料便可以和時脈的相位迅 速的做同步的動作,當相位同步之後時脈與資料回復迴路便接管了接 下來的工作,如同連續式時脈與資料回復電路一般,從上述的描述鎖 定時間大約為三個位元時間,但上述描述是假設在理想的條件下,意
22 指全部的區塊延遲在精準的控制和預測下,全部的區塊電路都有足夠 的頻寬,實際上則不然。 閘式壓控振盪器突發式時脈資料回復電路在鎖相迴路部分一個 匹配電路加在”Decision Circuit”之前,為了降低明顯的靜態相位誤差, 當序列資料輸入時。如果沒有匹配電路只要”PD_en=1”,時脈與資料 回復電路迴路的相位偵測器將會看到相位誤差,然後時脈與資料回復 電路迴路將會去追蹤此相位誤差,這個追蹤的過程可能需要一些時間, 所以快速鎖定的功能便會失去,所以匹被電路的加入提高了此電路的 可靠度。 不同於鎖相迴路突發式時脈與資料回復電路超取樣式時脈與資 料回復電路可靠度較高,因為是以數位電路的方式去實現,也就是超 取樣過程成功的話後端的控制邏輯將會挑選出一個適合的相位當回 復時脈訊號鎖定時間也因此決定了,藉由邏輯電路如 2.2 節所示,如 果 C=3 和 R=4 則全部的鎖定時間為 28 的資料位元。 雖然匹配電路已經被使用,閘式壓控振盪器突發式時脈資料回復 電路仍然會遇到一些問題,當然鎖相迴路突發式時脈與資料回復電路 也會遇到。 在 2.3 節我們已經知道了匹配電路的加入是為了產生一些延遲, 為了保證電路工作上的一些時序的關係,基本上來說匹配電路和其它 複製的閘式壓控振盪器,他們都是從其它電路的複製元件,一般來說 在晶片製作過程中一定會存在不匹配,因為製程飄移這些非理想特性 仍然存在的,但這些不匹配也許只有 1%,影響不大。 閘式壓控振盪器所存在的問題,閘式壓控振盪器是一個可以停止 的壓控振盪器,是由上述所談到觸發訊號所控制,意指的是此閘式壓
23
控振盪器將會產生一個寬頻的訊號而不是單一頻率的訊號,因為它可 以在 停止模式和 觸發模式隨 機做切換,如 圖 13 所示, ”GVCOA” 和”GVCOB”的波形更像隨機的資料而不是普通的時脈訊號。
對於輸入隨機資料的電路必需要足夠的頻寬,否則從閘式壓控振 盪器訊號自身的干擾(ISI Inter-Symbol Interference)將會造成延遲單元 頻寬的不足,但我們也不能從延遲單元本身的頻寬下手,後面文章將 會討論到,這個 ISI 的影響將會造成回復時脈的抖動使得資料接收變 得不可靠。
表格 5 為這三種突發式架構可靠度的統整: PLL-based type Phase-picking
type
GVCO-based type Locking time 3 bits 28 bits 1 bit
Reliability ISI from GVCO Reliable
ISI from GVCO 表格 5 突發式獲得的可靠度 總結上述,超取樣式時脈與資料回復電路比較適合高速的操作, 因為它有比較好的可靠度,但還是有其它特性必頇考慮進去。 2.4.2 功率和面積 對於資料速率為 2488Mbps,鎖相迴路突發式時脈與資料回復電 路和閘式壓控振盪器突發式時脈資料回復電路必需使用電流模式邏 輯(CML)去實現高速的正反器和多工器此時超取樣式時脈與資料回復 電路可以操作在 622Mbps 當 R=4 所以此架構仍然可以用靜態或是動
24 態的 CMOS 邏輯電路去實現,所以電流模式邏輯(CML)會消耗較大的 靜態功率,而超取樣式時脈與資料回復電路只消耗了動態功率,從模 擬上來觀察,超取樣式時脈與資料回復電路在資料速率為 2488Mbps 有較低的功耗。 就晶片面積來考慮,三者都沒有占到優勢,雖然電流模式邏輯 (CML)會消耗比較大的面積比起動態邏輯電路,超取樣式時脈與資料 回復電路是平行的處理程序,如果 R=4 然後三倍超取樣將會有 12 組 平行的邏輯電路,面積可想而知,所以很難去判斷哪一種架構比較節 省面積,表格 6 統整上述的討論:
PLL-based type Phase-picking type
GVCO-based type Power
consumption Larger Smaller Larger
Area - - - 表格 6 功率和面積 2.4.3 抖動特性 PLL-basedtype Phase-picking type GVCO-based type Jitter transfer Low pass Depends All pass Jitter tolerance Medium High High Jitter generation Small Large Medium
25
表格 7 所示,對抖動特性做一個歸納,雖然規格裡 [2][19]沒有 提到抖動轉移函數、抖動容忍度和抖動產生量在終端機的突發式時脈 與資料回復電路裡,但討論這些特性仍然有助於我們了解突發式時脈 與資料回復電路。
2.4.3.1 抖動轉移函數(Jitter Transfer Function)
抖動轉移函數意指的是當輸入的抖動量變化不同的速率時輸出 抖動量的變化,所以代表的是電路抖動量濾波的能力,對於資料中繼 放大器而言因為它們是以串連的方式連接,抖動轉移函數是一項很重 要的規格去過濾掉訊號串連路徑的抖動累積,如果沒有的話經過數十 個資料中繼放大器後,訊號將被不同的雜訊源所干擾。 什麼是時脈與資料回復電路理想的抖動轉移函數,我們說當輸入 的抖動變化非常慢時,當零交叉點以很慢的速率在理想的取樣點附近 徘徊,然後輸出將會追蹤輸入的變化以確保相位鎖定。換句話說,如 果當輸入的抖動量變化得非常快時,時脈與資料回復電路必需過濾掉 這個頻率的抖動量,也就是說輸出將以較少的比例去追蹤輸入的抖動, 因此抖動的轉移函數展現出低通的特性,如同鎖相迴路一般 [14]。 鎖相迴路突發式時脈與資料回復電路擁有過濾抖動的能力,超取 樣式時脈與資料回復電路則是透過控制邏輯來過濾抖動,如圖 9 所 示控制邏輯接收到輸入資料轉態的資訊然而挑選一個適當的相位時 脈去回復資料,所以當輸入的資料有抖動產生時,控制邏輯會及時做 出反應,所以全部的輸入抖動變化將會反映在輸出中,所以沒有抖動 轉移的能力,也就是一個全通函數的特性,換句話說當輸入的資料產 生抖動時控制邏輯去做一個平均,而不是直接反映在輸出端,而是挑
26 選出適當的相位,所以輸出抖動量的貢獻來自於鎖相迴路部分,所以 此架構還是可以過濾掉抖動 [16]。 上述所談到平均和適當的相位可以從圖 14 和圖 15 觀察出。 藉由多數決,輸入的抖動量將會被平均如圖 14 所示,取樣器的 中心相位被取做取樣的相位根據多數決的結果如圖 15 所示,為了進 行多數決,被取樣的資料點必需累積一定的周期時間,然後把這些結 果進行加總起來,結論是這個操作直接影響到鎖定的時間,也就是我 們的規格,所以這個統計的周期不能太長以致於不能達到快速鎖定的 功能。 圖 14 相位資訊的平均 圖 15 最好的相位 閘式壓控振盪器突發式時脈資料回復電路的抖動轉移函數為全
27 通的特性,因為閘式壓控振盪器的相位直接受輸入序列資料的影響而 立即去鎖定,當有輸入資料有抖動量時回復的時脈會直接反映這個抖 動量,結論為所有輸入資料非理想效應將會反映在回復的時脈上 [20]。 2.4.3.2 抖動容忍度(Jitter tolerance) 抖動顧名思義是非理想的零跨越週期性的訊號或資料上,一個理 想的周期性訊號如下式表式: V(t) = A × cos(ωt + ∅) 然後∅必需為常數,當∅為時間的函數時,訊號的零交叉點將會 在理想的位置上徘徊,也就是說會產生抖動,抖動的調變就是去調變 周期性的訊號,也就是: ∅ = B × cos wmt 抖動的容忍度意思為給定一個抖動的調變頻率去量測可以容忍 此頻率的抖動振福為多少,所以回復時脈的相位如果可以修正得更快, 抖動的容忍度越好,抖動容忍度也可以解釋成相位追蹤的測詴,如圖 16 所示。 圖 16 相位追蹤過程
28 跟抖動轉移函數做比較,有較慢的相位追蹤速度有較好的抖動過 濾能力,所以抖動轉移函數和抖動容忍度是個折衷的問題。較快的相 位追蹤導致較好的抖動容忍度,但相對抖動轉移能力變差;較慢的相 位追蹤導致較好的抖動轉移函數但相對的抖動容忍度也會變差。 對於鎖相迴路突發式時脈與資料回復電路來說,當突發鎖定時它 動作跟閉迴路的連續式時脈與資料回復電路操作相同,它的抖動容忍 度相當於連續式時脈與資料回復電路。一個閉迴路的時脈與資料回復 電路抖動轉移特性為低通,所以鎖相迴路突發式時脈與資料回復電路 抖動容忍度不是三者中最好的。 對於超取樣式時脈與資料回復電路來說,就如同上面所解釋的, 如果控制邏輯電路可以迅速的追蹤輸入資料的抖動量,有較好的抖動 容忍度,但相對的會使得抖動轉移變差。不同於 SONET 和千兆位元 乙太網路,被動光纖網路並沒有規範抖動轉移的好壞,所以在設計控 制邏輯時並不用將抖動轉移列入考慮,反而是輸出的相位校正速度能 符合鎖定時間的規格就可以了。 對閘式壓控振盪器突發式時脈資料回復電路來說,抖動的容忍度 是最高的,因為此架構擁有最快的相位追蹤能力,每一次資料轉態的 發生,閘式壓控振盪器的相位將會被立即的校正,所以此架構擁有最 好的抖動容忍力但最差的抖動轉移能力在三者之中。 2.4.3.3 抖動產生量(Jitter Generation) 抖動產生量意思是當沒有輸入抖動時輸出的抖動量,這個特性直 接影響到這些電路的時間寬限,所以這個規格對時脈與資料回復電路 很重要甚至不在此規範中 [2][19]也要考量,這個抖動的來源來自電
29 路本身,例如:壓控振盪器的相位雜訊或電壓雜訊。 為了做比較,鎖相迴路突發式時脈與資料回復電路擁有最低的抖 動產生量因為它是一個閉迴路的操作,這個迴路可以濾掉輸入抖動量 和電路本身的雜訊。 相反的,超取樣式時脈與資料回復電路有最大的抖動產生量,既 不是來自振盪器的相位雜訊也不是供應電壓的雜訊,它是超取樣天生 的特性,它的相位校正式離散時間的而非連續時間,所以每次相位改 變,伴隨著 1/3 UI 的抖動量產生在回復時脈和資料上,甚至沒有輸入 抖動量但相位的跳動仍然可以明顯被觀察。 對於閘式壓控振盪器突發式時脈資料回復電路的抖動產生量是 介於三者的中間,雖然不是一個閉迴路的架構,但可以過濾掉電路本 身的雜訊,也沒有相位快速跳動的問題,所以抖動容忍度介於兩者之 中。 2.5 總結 表格 8 為 2.4 節的總結比較表。 PLL-based type Phase-picking type GVCO-based type Locking time 3 bits 28 bits 1 bit
Reliability ISI from GVCO Reliable ISI from GVCO Power
consumption
Larger Smaller Larger
30
Jitter transfer Low pass Depends All pass Jitter tolerance Medium High High Jitter generation Small Large Medium
表格 8 總結比較表 根據表格 8 所示每種架構都有其優缺點,我們的目的是追求接 收的資料速率,所以主要的問題將會是可靠度,對於鎖相迴路突發式 時脈與資料回復電路和閘式壓控振盪器突發式時脈資料回復電路而 言 問 題 是 相 同 的 , 就 是 來 自 壓 控 振 盪 器 訊 號 自 身 的 干 擾 (ISI Inter-Symbol Interference),反之超取樣式時脈與資料回復電路有較高 的可靠度,所以第三章提出了一個多頻帶快速鎖定的突發式時脈與資 料回復電路,且提出閘式壓控振盪器解決了此問題。
31
第三章
一個多頻帶突發式時脈資料回復電路
本電路設計主要實現,一個閘式壓控振盪器為基準的突發式時脈 與資料回復電路,利用數位輔助鎖頻迴路去鎖定閘式壓控振盪器頻率, 再交給閘式壓控振盪器電路進行快速相位的重置和資料與相位的鎖 定,此電路所提出的閘式壓控振盪器採 1/7 速率的操作,也就是在一 個時脈週期之內有七筆傳送資料,進而達到高速操作及低功率消耗之 目的,且利用多模數的除頻器使此電路可以應用在不同頻帶,除此之 外突發式時脈與資料回復電路應用在被動光纖網路中,有許多不同的 用戶端伴隨著不同資料速率連結到終端機上,因此突發式時脈與資料 回復電路可以操作在不同頻帶更為有用。 3.1 系統架構 本晶片的電路架構如圖 17 所示,其主要架構為一個閘式壓控振 盪器突發式時脈與資料回復電路,包含頻率檢知器電路(Frequency Locked Detector)、十六位元上、下計數器(U/D Counter)、寬範圍多模 數除頻器(Modulus Divider)、電流式數位類比轉換器(Current Steering DAC) 、 和 差 調 變 器 (Delta-Sigma Modulator) 、 閘 式 壓 控 振 盪 器 (Gated-VCO)。32 圖 17 系統架構圖 此晶片主要操作在兩個模式,第一個模式為頻率校正模式,外接 一個參考時脈訊號到頻率偵測電路,頻率偵測電路所扮演的角色為判 斷參考時脈訊號 fREF和 fVCODi v的頻率差,把誤差資訊透過上下計數器 轉換成數位碼給電流式數位類比轉換電路去調整閘式壓控振盪器的 頻率,最後達到穩態的頻率為多模數除頻器除數乘以參考時脈訊號的 頻率。第二個模式為快速資料回復模式需透過閘式壓控振盪器去實現, 閘式壓控振盪器顧名思義為邏輯控制的振盪器,此電路會偵測輸入序 列資料的資料轉態點,把轉態的時間資訊給振盪器進行時脈重置,以 完成快速鎖定的功能,且此電路為 1/7 資料速率的時脈與資料回復電 路,閘式壓控振盪器(Gated-VCO)的振盪頻率為輸入序列資料的 1/7 倍, 以降低下一級多模數除頻器(Modulus Divider)速度的需求和減低功率 消耗。 為了解決數位控制振盪器解析度不足的問題,在此使用藉由和差 調變器(Delta-Sigma Modulator),利用高速切換的方式,產生小於一個 LSB 的平均改變量,得到等效上小數的作用來增加解析度,以降低穩
33
態時量化雜訊所造成的影響。為了應用於不同的頻帶所以多模數除頻 器除數範圍為除 2-63,所能涵蓋輸入序列資料速率範圍為 622Mbps 到 7Gbps,最後此晶片會把序列資料解多工成七筆並列資料輸出。
3.2 來自閘式壓控振盪器訊號自身的干擾
3.2.1 訊號自身的干擾 (ISI Inter-Symbol Interference)
在開始介紹所提出的閘式壓控振盪器之前,我們先來檢視閘式壓 控振盪器會遇到的問題,只要是隨機的資料將會遇到訊號自身的干擾 (ISI Inter-Symbol Interference)的問題,我們可以從圖 18這個例子來看, 我們可以看出因為訊號自身的干擾造成不足的頻寬,後來的訊號會干 擾之前的訊號,零交叉點將會偏移本來的理想值所以會造成抖動的產 生,因此在資料經過的電路都應該避免訊號自身的干擾的發生。
34 (b) 不足的頻寬 (c) 訊號自身干擾的眼圖 圖 18 訊號自身的干擾 然而閘式壓控振盪器的訊號自身干擾現象不是來自不足的頻寬, 如第二章所提到的,閘式壓控振盪器會隨機的操作在停止和振盪的模 式,如果振盪器的振幅在停止模式時不相同在兩個狀態中做切換將會 造成非理想的波形,這個現象就稱為閘式壓控振盪器的訊號自身干 擾。 所以從文獻中提到很多的閘式壓控振盪器突發式時脈與資料回 復電路架構,不幸的它們都有訊號自身的干擾的問題。 3.2.2 閘式壓控振盪器的結構 雖然很多文獻都有提到閘式壓控振盪器突發式時脈與資料回復 電路,不過閘式壓控振盪器的結構可以區分成兩類。一種是由兩個閘 式壓控振盪器所構成然後連結到一個反或閘 [21][22][23]或是多工器 [24],另外一種是由閘式壓控振盪器和邊緣檢測器去觸發閘式壓控振
35 盪器 [25][26][27],除了 [24],架構及時序圖如圖 19 和圖 20 所示。 (a) 區塊圖 (b) 時序圖 圖 19 兩個閘式壓控振盪器所構成架構 (a) 區塊圖
36 (b) 時序圖 圖 20 邊緣檢測器閘式壓控振盪器所構成架構 第一個架構已經在第二章所提過,輸入的序列資料將會使兩個閘 式壓控振盪器進入停止模式,然後利用反或閘去合成出回復的時脈訊 號。 第二個架構不同於前者的是,不是經過輸入的序列資料去改變閘 式壓控振盪器而是透過邊緣檢測器每當輸入資料有發生轉態便產生 一個脈衝去觸發閘式壓控振盪器,從區塊圖可以看到,邊緣檢測器由 T/2 延遲單元和互斥或閘所構成然後產生T/2脈衝寬度的觸發訊號, T/2 延遲單元是由閘式壓控振盪器的延遲單元複製出來的。所以當輸 入資料有轉態發生時,邊緣檢測電路將會產生 T/2 脈衝寬度的觸發訊 號,然後閘式壓控振盪器將會進入停止模式在此脈衝下,當T/2 時間 過後閘式壓控振盪器恢復振盪,然而它的相位會瞬間對齊輸入資料的 相位,也許有些文獻的邏輯閘會不同,但其操作原理是相同的。 3.3 提出的閘式壓控振盪器 3.3.1 結構 如第 二章所提 及,為了避 免訊號自身 的干擾 (ISI Inter-Symbol Interference)對閘式壓控振盪器造成非理想的影響,圖 21 所示的閘式
37 壓控振盪器架構,僅操作在 1/7 輸入序列資料速率的閘式壓控振盪器 架構,降低了每一級延遲單元在高速輸入序列資料頻寬上的需求,它 是由七級延遲單元和資料邊緣檢測器所構成。 圖 21 1/7 資料速率閘式壓控振盪器電路架構 3.3.2 操作 因為對於突發式的亂數輸入序列資料我們必頇萃取出它第一筆 輸入資料的時間點而進行相位快速校正,而且選用操作方式為 1/7 速 率操作,顧名思義為一個時脈周期有七筆序列資料,所以此架構是利 用七個 D 型正反器,利用序列資料來取樣判斷出輸入的資料第一筆上 升緣落在一個時脈週期時間的哪一個相位間,再進行時脈重置跟鎖定 的動作以產生合適的取樣所需的時脈訊號,時序分析如圖 22 所示。 從圖 22 可以得知,因為時脈頻率比輸入序列資料的速率慢,所 以對於亂數資料而言,只要資料從低邏輯準位轉變到高邏輯準位轉態 間,我們必需判斷轉態的序列資料在一個時脈週期的位置,所以利用 取樣七個不同相位所產生的時間區間,透過邏輯操作來判斷此筆資料
38 落在哪一個區間,再進行對閘式振盪器迅速校正相位差,使得資料和 時脈得以鎖定對齊。 從圖 22 觀察看出,∅1~∅7分別為閘式環型振盪器 14 個相位中的 7 組相位,我們利用此相位的時脈訊號來產生脈衝序列,再利用輸入 的序列資料直接取樣來判斷序列資料的輸入轉態時間點,進而進行突 發式的鎖定過程。 圖 22 操作時序圖 由圖 23、圖 24 所示為閘式壓控振盪器子電路的架構,如圖 23 所示為 TSPC-Type D 型正反器且第一級為 NAND 的邏輯判斷,我們利
39
用此電路來產生脈衝區間,用來偵測輸入資料的轉態點。由圖 21 可 以得知此閘式壓控振盪器為環型振盪器的架構,每一級的延遲單元如 圖 24 所示,由 Global Bias 複製到 Local Bias 給延遲單元所使用,藉 由改變每一級的延遲時間而改變整個振盪器的振盪頻率,每一級的延 遲單元有兩條路徑,一條路徑為了閘式壓控振盪器進行無外力的振盪 路徑,就如同傳統的閘式振盪器的停止模式,當資料有轉態時會關閉 無外力的振盪路徑而開啟另外一條重置路徑,進行資料、相位的重置 校正功能以便達到快速鎖定的目的。 圖 23 閘式壓控振盪器控制電路 圖 24 閘式壓控振盪器延遲單元
40 3.4 並行同步輸出解多工電路 因為輸入序列資料和時脈相位校正之後,接收到的是並行的資料 且是依序解工多出來的,所以我們利用七級環型振盪器本身就有的 14 個相位,取三組時脈訊號來把輸入序列資料轉成並列輸出,如圖 25 所示為並行同步輸出解多工電路,首先利用兩個相差一百八十度的相 位進行依序解工多出來的資料的錯排,再由領先上述一百八十度的相 位訊號去做最後同步的動作,電路圖由圖 25 所示,如圖 26 所示為 同步輸出並行解多工資料電路時序圖,顯示為輸入序列的資料,依序 解工多出來的資料,把依序解工多出來的資料做一百八十度錯排,再 利用時脈相位做最後同步的動作以完成並行同步輸出的功能。 圖 25 並行同步輸出解多工電路
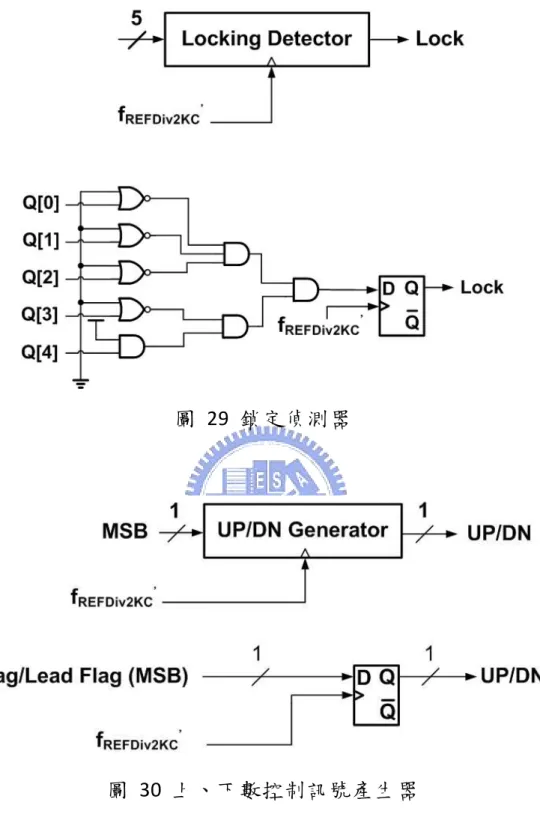
41 圖 26 同步輸出並行解多工資料電路時序圖 3.5 頻率檢知器之原理和設計 頻率偵測器架構如圖 27 所示,架構主要包含一個五位元計數器 (Counter)、鎖定偵測器(Locking Detector)和上、下數控制訊號產生器 (UP/DN Generator),頻率偵測器的功能是比較從多模數除頻器回授的 訊號和參考時脈訊號 fREF的頻率。
42 圖 27 頻率檢知器電路架構圖 首先將參考時脈訊號(fREF)經過一個除頻器除以 2Kc,然後利用多 模數除頻器回授的訊號(fVCODiv)對除 2KC週期的參考時脈訊號負緣進 行計數,如圖 28 所示,如果經過除頻的參考時脈訊號頻率和多模數 除頻器回授的訊號頻率相差很接近時,計數器所累積的數位碼應該為 KC ± 1,計數器所累積的值會被儲存於下一級暫存器,在參考訊號除 2KC的時脈訊號正緣會把計數器的值歸零為了下一次比較。 鎖定偵測器(Locking Detector),以除 2KC=32 而言,鎖定偵測器的 功能為判斷五位元計數器最後輸出的值是否為 16,也就是所謂的是 否為 KC 週期,架構如圖 29 所示,如果鎖定偵測器判斷為鎖定時則 Lock 輸出為高電位,會使下一級十六位元上、下數計數器停止計數, 反之則會啟動下一級十六位元上、下數計數器進行上數或下數。 圖 28 計數模式 上、下數控制訊號產生器(UP/DN Generator)是對計數器所累積的 值的最高位元進行判斷,當計數器所累積值的最高位元為零時則進行 上數,反之則下數,鎖定偵測器和上、下數訊號產生器都在除 2KC週 期的參考時脈訊號負緣動作,此電路利用一條訊號的兩種位準去表示 下一級十六位元計數器該上數或下數,架構如圖 30 所示。
43
圖 29 鎖定偵測器
圖 30 上、下數控制訊號產生器
3.6 十六位元上、下數計數器
此計數器的功能為接收上一級頻率檢知器所判斷出來的訊號,頻 率偵測器輸出兩種控制訊號 Lock 和 UP/DN,如果 Lock 訊號判斷為鎖 定時不管 UP/DN 訊號為多少,十六位元上、下數計數器為儲存上一
44 個狀態的值不進行任何計數的動作;反之如果 Lock 訊號判斷為不鎖 定,則依 UP/DN 控制訊號進行上數或下數,電路架構如圖 31 所示, 此計數器的數位碼更新率為參考時脈訊號除以 2KC去更新頻率檢知器 的比較結果。 圖 31 十六位元上、下數計數器
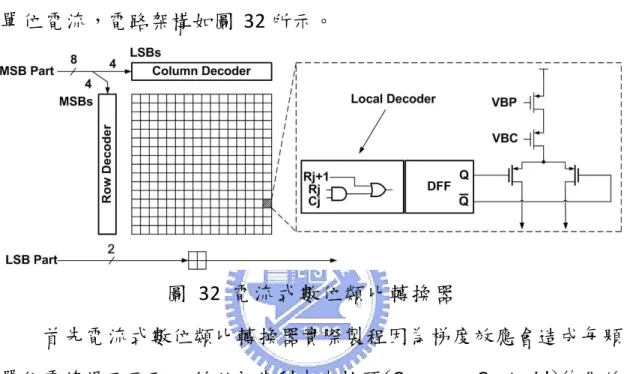
45 3.7 電流式數位類比轉換器 此電路目的主要是把上一級十六位元上、下數計數器所累積的值 轉換成類比電壓來控制閘式壓控振盪器的振盪頻率,此設計是設計十 位元電流式數位類比轉換器再利用六位元和差調變器(Delta-Sigma Modulator)內插出小於最小有效位元的解析度,首先在設計電流式數 位類比轉換器如果全部電流源為二位元加權(Binary Weighted)的話主 要會遇到兩個主要的問題:第一點為在中間碼切換時(01111-11111 -> 10000-00000)會造成很大的電流跳動,再則從 01111-11111 碼切換到 10000-00000 碼,短暫的瞬間有可能十個開關會同時開啟,第二點因 為電流源彼此會有誤差,不能保證中間碼切換時,最高位元電流會大 於 其 它 位 元 電 流 的 總 合 , 也 就 是 不 能 保 證 單 調 遞 增 (Monotonic Increasing) , 這 些 都 會 影 響 此 電 路 的 DNL (Differential Nonlinearity)。 為了降低電流切換瞬間所造成的電流的跳動(Current Glitch)另一 種編碼方式為溫度計編碼(Thermometer Code),所有電流源的權重都 一樣,這樣十位元就有 210=1024 個單位電流源,每次增加或減少一 個 數 位碼 只 開啟 或關 閉一 個 單位 電流 源 ,有 效降 低 電流 的跳 動 (Current Glitch) 對 整 體 電 路 的 影 響 也 能 保 證 一 定 會 單 調 遞 增 ( Monotonic Increasing),但此電路還要有十位元的二位元加權碼到溫 度計編碼的解碼器,因為這麼高位元的解碼器會使邏輯複雜度增加許 多,所以溫度計編碼式數位類比轉換器所考量的是面積的因素。 綜合以上面積、特性上的考量,最常用的方式為把十位元切分為 溫度計編碼部分和二位元加權碼部分,我所實現的十位元電流式數位
46
類比轉換器把高位元的八位元切成溫度計編碼方式;剩餘兩位元則用 二位元加權的編碼方式,所以會需要一個八位元的二位元加權碼到溫 度計編碼的解碼器,我所採用的方式為兩個四位元二位元加權碼到溫 度計編碼的解碼器(Row & Column Decoder)把溫度計編碼的部分切成 16×16 = 256 個單位電流,再藉由(Local Decoder)逐一開啟或關閉這些 單位電流,電路架構如圖 32 所示。
圖 32 電流式數位類比轉換器
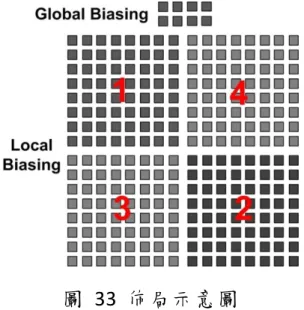
首先電流式數位類比轉換器實際製程因為梯度效應會造成每顆 單位電流源不匹配,所以初步利中央抽頭(Common-Centroid)佈局的 方式去分成四個象限,先利用 Global Bias 複製參考電流給 Local Bias, 再利用 Local Bias 把參考電流複製到每個象限,象限兩兩彼此沒有直 接關係,如圖 33 所示。
47 圖 33 佈局示意圖 雖然初步把整個 16×16 = 256 個電流陣列分成四個象限,能有效 增加 INL 和 DNL 的特性,但每個象限內因製程造成梯度的問題還是存 在,所以再把每個象限內行跟列再做錯排,增加 INL 特性,最後在主 動單位電流源外圍加兩層 Dummy Cell 為了讓邊緣主動的單位電流源 看到的環境是一樣,避免 Boundary Effect 對電路特性造成影響,如圖 34 所示。
48 3.8 和差調變器 此電路目的為藉由和差調變器的快速切換,長時間觀察產生小於 一個最小有效位元數的平均改變量,得到等效上小數的作用來增加解 析度,架構上採用 MASH-II 的架構去實現,此架構完全可以用數位的 方式去實現,電路為兩個累加器的串接,信號流程圖為圖 35 所示, 轉換函數為: Y[z] = X[z] + (1-z-1)2〃E[z] 把信號流程圖對應到實體電路,如圖 36 所示,可看成兩個累加 器串接,最後誤差量 SDMOut1~3 利用切換電流開關進行相加減的動 作,再和電流式數位類比轉換器的電流進行加總進而改變閘式壓控振 盪器的振盪頻率。 圖 35 二階 MASH 信號方塊圖
49 圖 36 二階 MASH 電路圖 3.9 多模數除頻器 為了使突發式時脈與資料回復電路操作在不同頻段,一個多模數 除頻器是必需的,傳統的多模數除頻器主要是由雙模前置除頻器和可 程式化的計數器所構成,如圖 37 所示 [30],這種架構的設計在 [30][31]-[35]已有廣泛的被探討,如圖 37 這種架構存在這一些非理想 的特性,其一是缺少模組化,除了雙模前置除頻器之外還需要兩個額 外的計數器去產生一個給定的除數比例,兩個可程式化的計數器接在 雙模前置除頻器之後除了加重前級負載外,意指的是功率也消耗較大, 晶片佈局上因為缺乏模組化概念也比較複雜。
50 圖 37 雙模前置除頻器式多模數除頻器 所以接下來要介紹高可重複使用性、高彈性和符合模組化以縮短 佈局時間的多模數除頻器架構,如圖 38 所示 [29],由圖可以得知此 架構是由除二除三單元串接而成,這個架構省去了舊有架構的較長時 間的延遲迴路,它的回授路徑只有介於前後除二除三單元而已,且非 常符合模組化的概念,構成單元都一致,也加快了佈局的時間。 操作原理如下,只要在除頻周期內最後一個除二除三單元產生 modn-1的訊號,這個訊號往前面的除二除三單元傳遞,這個訊號做再 同步每一個除二除三單元,只要 mod 位於高準位表示除二除三單元 進行除三動作,此時可控制的輸入 p 被設定為高準位,所以把除二除 三單元串接產生的輸出週期為: Tout = 2n ∙ T in + 2n−1 ∙ Tin ∙ pn−1+ ⋯ + 2 ∙ Tin ∙ p1 + Tin ∙ p0 = (2n+ 2n−1∙ pn−1+ ⋯ + 2 ∙ p1+ p0) ∙ Tin Tin為輸入訊號 Fin的周期,p0⋯ pn−1是二進位可程式化的數值, 所以由上式可以觀察出除數範圍為:2𝑛⋯ 2𝑛+1− 1可以被實現。
![圖 5 具有參考時脈訊號的時脈與資料回復電路系統 確認完鎖頻迴路後鎖相迴路必需鎖住輸入的序列資料滿足所想 要的規格,因為迴路頻寬大約為 MHz 等級,所以鎖相迴路約要 1us 去達到穩態,這部分跟傳統的有鎖頻迴路架構一樣,所以鎖相迴路部 分必頇稍做修改使可以操作在快速鎖定。 一個可行的方式如圖 6 [15]所示,這裡先提到一些特別的組成方 塊以達到快速相位校正:閘式壓控振盪器(GVCO)、多工器(MUX)和控 制邏輯(Control logic)。](https://thumb-ap.123doks.com/thumbv2/9libinfo/8021113.160819/27.893.164.710.458.748/跟傳統的路架構一樣所以鎖相迴路部分必頇稍做修改使操作一個可行.webp)