國立交通大學
電控工程研究所
碩 士 論 文
從頸部斷層掃描影像自動偵測出異常淋巴
及腺體之研究
Automatic Detection of Abnormal Lymph Nodes
and Glands in Neck CT Images
研 究 生 :陳俊良
指 導 教 授 :林昇甫 博士
從頸部斷層掃描影像自動偵測出異常淋巴及腺體之研究
Automatic Detection of Abnormal Lymph Nodes and Glands in
Neck CT Images
研 究 生 :陳俊良
Student: Chun-Liang Chen
指 導 教 授 :林昇甫 博士
Advisor: Dr. Sheng-Fuu Lin
國立交通大學
電控工程研究所
碩士論文
A Thesis
Submitted to Institute of Electrical Control Engineering College of Electrical Engineering
National Chiao Tung University in Partial Fulfillment of the Requirements
for the Degree of Master
in
Electrical Control Engineering July 2012
Hsinchu, Taiwan, R.O.C 中華民國一Ο一年七月
從頸部斷層掃描影像自動偵測出異常淋巴
及腺體之研究
學生:陳俊良
指導教授:林昇甫 博士
國立交通大學電控工程研究所
摘要
在醫學影像中,電腦斷層掃描(Computerized Tomography, CT) 技術應用於放 射性檢查,而頸部斷層掃描檢查常常應用於研究頸部的腫瘤或腫塊,以及尋找頸 部淋巴結腫大;然而,頸部 CT 影像中組織複雜,醫師於診斷時,時常基於此種 因素,不斷猜測病灶的正確位置及大小,陷入膠著的狀況。 本研究的目的為利用影像處理與資訊技術的方式針對頸部 CT 影像進行電腦 自動化醫學分析,並將結果顯示於電腦畫面或醫學儀器上,藉由此種方式,讓醫 師更快了解病人影像中的狀況,進而減輕醫師負擔外,更使得效率提升;而此項 技術未來更可應用於協助醫師進行診斷,且使醫生誤判率下降,以增進診斷過程 的精確度。 本論文的主要貢獻如下:第一,本論文利用適於頸部 CT 影像軟組織分析方 法,改善頸部 CT 影像中組織分區的缺點,可有效分辨異常淋巴結及軟組織。第 二,提出一可協助病灶偵測之流程雛形及方法。本論文最終之實驗結果顯示本輔 助診斷系統在頸部 CT 影像上能有效地找出疑似病灶之可疑區塊,為醫師提供更 簡便及有效的輔助診斷資訊。Automatic Detection of Abnormal Lymph Nodes
and Glands in Neck CT Images
Student: Chun-Liang Chen Advisor: Dr. Sheng-Fuu Lin
Institute of Electrical Control Engineering
National Chiao Tung University
ABSTRACT
In the medical images, computerized tomography (CT) technology is used in radiological examinations, and neck CT scanning inspection is often applied in research of neck tumors or masses as well as in searching for the cervical lymph node to be tumescent; however, due to the fact that tissue of neck CT is complex, doctors are often confused about the correct location and size of the lesion when they are diagnosing, and then trapped into a stalemated situation.
The purpose of this study is the use of image processing and information technology for automatically computer-aided medical analysis on neck CT images, and displays the results on a computer screen or medical instruments. By this way, doctors are allowed to understand the patient's situation more quickly. Moreover, this technology not only alleviates the burden on doctors, but also promotes the efficiency.
The main contribution of this paper is as follows: First, this paper uses a suitable analysis method on soft tissues of the neck CT image to improve the shortcoming when partitioning them, and effectively distinguish the abnormal lymph nodes and soft tissue. Second, this paper proposes a prototype and methods to assist the process of lesion detection. In this thesis, the final experimental results show that the computer-aided diagnosis system in the neck CT imaging can effectively identify the suspicious block of suspected lesions and provide doctors with simpler and effective assistant diagnostic information.
誌謝
匆匆的兩年過去了,碩士生活也畫下了個句點,心中充滿了無限的感謝。首 先我要感謝指導教授林昇甫博士,在老師的教導下,使我的學業與專業進步良 多,同時感謝吳晉嘉、蘇建焜博士,撥冗參加學生的口試,並且給予許多寶貴建 議,讓學生的論文可以更佳的完整。 感謝實驗室學長士哲、國育、俊偉、逸章、東穎、世雄、家昌、煒清、家興、 則銘、勁成、銘達、裕筆在專業領域上的傳授以及生活上的照顧;感謝陪伴我走 過兩年碩士生涯一起同甘共苦的同學植諺、柏宏、婷婷以及學弟妹衍橙、雅君、 炳晟、明揚、兆傑;感謝國泰醫院的合作醫師及助理,在他們的協助之下,我才 可以順利完成研究。 感謝好友逸翔、致緯、柏文、瑞銘、廷燿在我低潮的時候,給我無限的鼓勵, 讓我繼續向前,並且為我的碩士生活創造許多快樂。感謝其他在各地的學長姐、 學弟妹、同學、朋友給我的關懷和鼓勵。 最後感謝我親愛的家人,感謝他們在我求學過程中一路的扶持與打氣,讓我 在除了在學業上無後顧之憂,順利完成學業。目錄
中文摘要 ... i 英文摘要 ... ii 誌謝 ... iii 目錄 ... iv 圖目錄 ... vi 表目錄 ... ix 第一章 緒論 ... 1 1.1 頸部斷層掃描之介紹 ... 1 1.2 研究動機 ... 3 1.3 相關研究之探討 ... 3 1.4 論文主體與貢獻 ... 7 第二章 相關技術與原理 ... 8 2.1 影像處理技術 ... 8 2.1.1 影像二值化 ... 8 2.1.2 連通元件標記 ... 9 2.2 小波轉換 ... 11 2.2.1 基底函數 ... 11 2.2.2 離散小波轉換 ... 13 2.3 均值移動演算法 ... 16 2.4 區域成長演算法 ... 19 第三章 系統流程 ... 21 3.1 系統架構 ... 21 3.2 邊緣強度的抽取 ... 233.3 影像前處理 ... 25 3.3.1 紋理分析 ... 26 3.3.2 灰階值挑選及小區塊的濾除 ... 27 3.4 影像分區 ... 29 3.4.1 影像粗分區 ... 31 3.4.2 影像細分區 ... 33 3.4.3 區塊合併 ... 37 3.5 特徵抽取 ... 39 第四章 實驗結果與分析 ... 41 4.1 實驗機制 ... 41 4.1.1 研究資料來源及硬體設備 ... 41 4.1.2 效能評估 ... 42 4.2 實驗結果分析 ... 44 4.3 實驗結果討論 ... 57 第五章 結論與未來展望 ... 61 參考文獻 ... 63
圖目錄
圖 1.1 電腦斷層掃描器。(http://www.cgh.org.tw/tw/content/depart/emission/lnstru ... 1 圖 1.2 各種病灶圖。(a)舌癌;(b)下咽癌;(c)頸部腫塊;(d)耳下腺癌;(e)甲狀腺 癌;(f)顎下腺癌。 ... 2 圖 1.3 肝腫瘤分割實驗結果。(a)原始影像;(b)去除背景的肝臟影像;(c)將(b) 對比強化後的影像;(d)將(b)、(c)相加的影像;(e)將(d)進行高斯平滑;(f)將 (e)進行反覆自我組織分析技術後的影像;(g)實驗結果圖。 ... 4 圖 1.4 動態閥值分割結果。(a)~(d)為原始影像;(e)~(h)為分割結果影像。 ... 5 圖 2.1 影像二值化。(a)原始影像;(b)原始影像的直方圖;(c)二值影像。 ... 9 圖 2.2 像素間的近鄰。(a) 4 近鄰的像素;(b) 8 近鄰的像素。 ... 10 圖 2.3 像素間的連通。(a) 4 連通;(b) 8 連通。 ... 10 圖 2.4 8 連通的連接元件標記。(a)原始影像;(b) 8 連通標記結果。 ... 11 圖 2.5 一維離散小波轉換。 ... 14 圖 2.6 二維小波分解。 ... 14 圖 2.7 二維小波合成。 ... 15 圖 2.8 二維不同階數的小波轉換。(a)二維一階小波轉換;(b)二維二階小波轉換。 ... 16 圖 2.9 二維離散小波轉換實例。 (a) 原始影像;(b) 一階轉換;(c) 二階轉換。 ... 16 圖 2.10 均值移動演算法示意圖。 ... 18 圖 2.11 區域成長演算法示意圖。 ... 20 圖 3.1 整體流程圖。 ... 22 圖 3.2 Daubechies1 的基底函數。(a)尺度函數;(b)小波函數。 ... 23圖 3.3 二維離散小波轉換。(a)原始影像;(b)小波轉換後的影像。 ... 23 圖 3.4 小波收縮示意圖。(a)硬收縮;(b)軟收縮。 ... 24 圖 3.5 影像前處理流程圖。 ... 25 圖 3.6 強烈邊緣影像。 ... 26 圖 3.7 強烈邊緣的濾除。(a)平滑影像;(b)濾除強烈邊緣的平滑影像結果圖。 27 圖 3.10 小區塊濾除之結果圖。 ... 29 圖 3.11 帶寬不適合的情況。(a) 帶寬過大;(b) 帶寬過小。 ... 30 圖 3.12 分區演算法之流程圖。 ... 30 圖 3.13 均值移動演算法之流程圖。 ... 31 圖 3.14 經過均值移動演算法的結果圖。 ... 32 圖 3.15 粗分區結果圖。(a)粗分區結果灰階圖;(b)粗分區結果彩色圖。 ... 33 圖 3.16 狀況圖。(a)原始影像;(b)狀況區域。 ... 34 圖 3.17 細分區流程圖。 ... 35 圖 3.18 細分區結果圖。(a)變異度過大之細分區結果;(b)連通元件標記之細分區 結果。 ... 36 圖 3.19 有可能需要合併的狀況。(a)原始影像;(b)可合併之可能區塊。 ... 37 圖 3.20 合併流程圖。 ... 38 圖 3.21 合併結果圖。(a)相連區塊且平均強度相近之合併;(b)小區塊合併。 . 39 圖 3.22 特徵抽取示意圖。(a)原始影像;(b)符合可疑區塊特徵的結果。 ... 40 圖 4.1 系統介面圖。 ... 42 圖 4.2 案件一。(a)~(d)為案件一含醫師標記之原始影像序列;(e)~(h)為案件一之 系統偵測結果圖。 ... 46 圖 4.3 案件二。(a)~(c)為案件二含醫師標記之原始影像序列;(d)~(f)為案件二之 系統偵測結果圖。 ... 47 圖 4.4 案件三原始影像。(a)~(e)為案件三含醫師標記之原始影像序列。 ... 48 圖 4.5 案件三結果圖。(a)~(e)為案件三之系統偵測結果圖。 ... 49
圖 4.6 案件四。(a)~(c)為案件四含醫師標記之原始影像序列;(d)~(f)為案件四之 系統偵測結果圖。 ... 50 圖 4.7 案件五原始影像。(a)~(f)為案件五含醫師標記之原始影像序列。 ... 51 圖 4.8 案件五結果圖。(a)~(f)為案件五之系統偵測結果圖。 ... 52 圖 4.9 案件六原始影像。(a)~(h)為案件六含醫師標記之原始影像序列。... 53 圖 4.10 案件六結果圖。(a)~(h)為案件六之系統偵測結果圖。... 54 圖 4.11 案件七。(a)~(c)為案件七含醫師標記之原始影像序列;(d)~(f)為案件七 之系統偵測結果圖。 ... 55 圖 4.12 案件八。(a)~(d)為案件八含醫師標記之原始影像序列;(e)~(h)為案件八 之系統偵測結果圖。 ... 56
表目錄
表 4.1 病灶偵測的可能情況 ... 43 表 4.2 實驗結果表 ... 57
第一章 緒論
本論文主要研究的領域為頸部 CT 影像,如何在複雜的影像中,鎖定可疑的 區塊,標示出疑似病灶協助醫師診斷,將會是本論文研究的要點;而在不同人的 情況之下,影像的複雜度亦隨之不同,導致資料庫中各影像不具有明顯的共通點 及一致性,此為本論文所要面臨的重大難題。 本章共分成四節,1.1 節將介紹頸部斷層掃描,1.2 節闡述本論文的研究動 機,1.3 節則是與本論文相關的研究,1.4 節說明本論文之貢獻。1.1 頸部斷層掃描之介紹
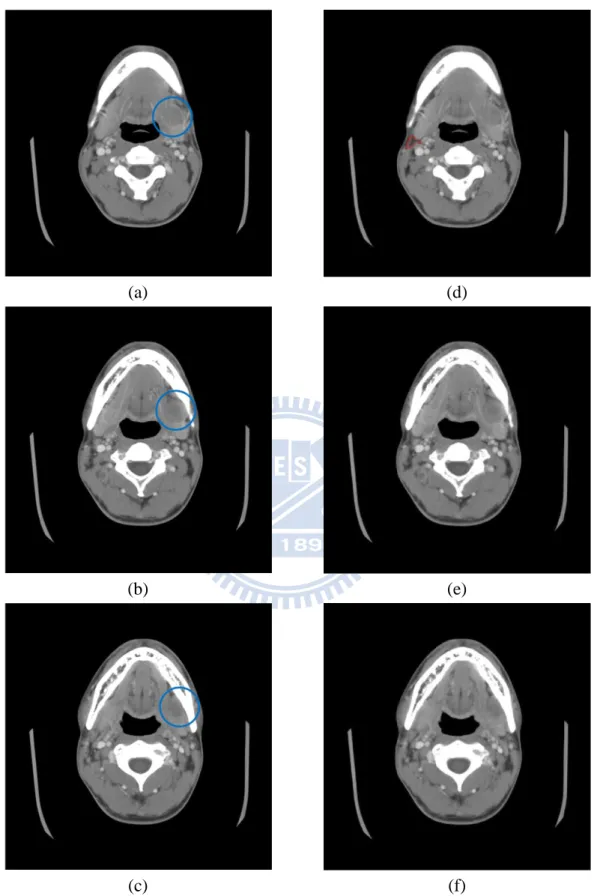
從西元 1970 年代初 CT 的發明,帶動了影像處理在醫學界的應用,使醫師 能夠觀察病患橫向切片影像,對醫學發展有很大的影響。異於以往的外科手術或 解剖等醫學技術,CT 是一種利用人體組織對 X 光吸收程度的原理以非侵入性的 方式了解人的身體內部器官狀況,其硬體設備如圖 1.1 所示。 圖 1.1 電腦斷層掃描器。(http://www.cgh.org.tw/tw/content/depart/emission/lnstru mentB-1.html)現今的 CT 技術應用在各種不同的領域,像在醫學上的放射性檢查、海關出 入口檢查,或者是利用 X 光相似原理進行工業檢測及精密儀器檢測等等;而醫 學上頸部斷層掃描是指從顱底至胸部上方的頸部區域,主要是檢查頸部軟組織, 其中包括頸部肌肉、各類組織及各類腺體,例如耳下腺、顎下腺、甲狀腺等等。 此外,亦可看見骨頭、血管和氣管,例如下頜骨、脊柱、頸部動靜脈等等。 而在頸部斷層掃描影像的應用,主要是在研究在脖子上的腫瘤或腫塊,以及 尋找淋巴結或腺體是否有異常的腫大,例如耳下腺或顎下腺的病變、氣管組織膿 腫、頸部有腫塊或膿腫、舌頭是否有病變、呼吸道異物偵測及聲帶腫大。其中, 頸部 CT 影像通常是被用來檢查頸部腫瘤及腫塊,或尋找頸部淋巴結腫大的情 況。圖 1.2 為各種病灶圖。 (a) (b) (c) (d) (e) (f) 圖 1.2 各種病灶圖。(a)舌癌;(b)下咽癌;(c)頸部腫塊;(d)耳下腺癌;(e)甲狀腺 癌;(f)顎下腺癌。
1.2 研究動機
隨著 CT 掃描機的發展,以非侵入性方式獲取病患身體資訊並非困難,但是 得到影像資訊後更需要適當的利用,正常人頸部淋巴大小約半顆米粒大,若發炎 的話,淋巴會腫脹,但通常不會超過兩公分,若是大於兩公分,即有可能為可疑 的異常淋巴。然而,頸部淋巴病變或是癌細胞轉移時,有三公分以上的腫塊,則 有可能為惡性腫瘤,我們將可利用 CT 影像中,可疑區塊的大小來判斷是否可能 為異常淋巴或腫瘤。 以往在病患拍攝完頸部 CT 影像後,病患將在候診室等待,資料會傳送至醫 師診斷的電腦上,待醫師了解病人身體狀況後,再請病人進入診療室;目前頸部 診斷的方式是由醫師觀看患者的頸部 CT 影像後,根據醫師的經驗去判斷是否有 異狀或哪個部分出現可疑症狀,此種診斷方式的正確性完全依據醫師的經驗;若 是能藉由電腦輔助工具與影像處理技術的方法來發展出一套可自動分析頸部 CT 影像可疑區塊的系統,在進行 CT 拍攝完成後,立即進行自動化偵測頸部異常淋 巴或腺體,將可提供醫師影像中可疑的異常區塊,如此可減少醫師診斷的時間, 同時提高診斷的品質,並在醫學上有進一步的研究成果。1.3 相關研究之探討
針對醫學影像中,利用影像處理技術對 CT 影像進行分析有著極大的門檻, 影像的清晰度及複雜度都將影響演算法的開發,時常因為影像不清晰或是 CT 影 像中組織過於複雜的影響,使得在部分器官的 CT 影像分析有很大的困難。 現今常見藉由人體 CT 影像,進行影像處理技術分析或演算法研發,以尋找 出異常淋巴或可疑腫瘤的器官有肺、肝及乳房等等器官 ,如 2010 年 N.H. Abdel-massieh 等人提出的方法[1]可自動將肝臟病變的組織抓取出來,其先將含 腫瘤的肝臟與 CT 影像背景分割出來,再將分割出來的肝臟進行對比強化(contrast enhancement),並把結果影像的灰階值與原影像灰階值相加,接著把新影像進行高斯平滑(gaussian smoothing)與反覆自我組織分析技術(iterative self-organizing data analysis technique, ISODATA),最後利用型態學進行洞的填充(hole filling)、 侵蝕(erosion)、膨脹(dilation),結果如圖 1.3 所示。 (a) (b) (c) (d) (e) (f) (g) 圖 1.3 肝腫瘤分割實驗結果。(a)原始影像;(b)去除背景的肝臟影像;(c)將(b) 對比強化後的影像;(d)將(b)、(c)相加的影像;(e)將(d)進行高斯平滑;(f)將(e) 進行反覆自我組織分析技術後的影像;(g)實驗結果圖。 而頸部異常淋巴的偵測由於影像複雜度過高及對比度低的因素,研究速度慢 於其他器官,近年來才逐漸的發展。頸部 CT 影像中的組織非常多,其中包括了 肌肉、骨頭、氣管、血管等等組織,故在判斷頸部異常淋巴前,常需識別出明顯 組織進行定位,加上解剖學的相關知識以判別頸部 CT 影像中各組織位置,進而 了解異常淋巴所在腺體或區塊,如文獻[2]。在 2006 年 Chia-Chi Teng[3]等人的研 究中,利用影像中特定組織較亮的特性使用動態閥值(dynamic thresholding)分 割,同時考量相關的灰階值、相對位置、大小與形狀,藉此技術自動分割出頸部 器官,如頸椎、下頜骨、舌骨、頸動靜脈及胸鎖乳突肌等組織,如圖 1.4 所示。
其中 cs 代表頸椎(cervical spine),m 代表下頜骨(mandible),n 代表舌骨(hyoid), ij 代表頸內靜脈(internal jugular vein),cc 代表頸總動脈(common carotid artery)。
(a) (b) (c) (d) (e) (f) (g) (h) 圖 1.4 動態閥值分割結果。(a)~(d)為原始影像;(e)~(h)為分割結果影像。 此外,以動態閥值分割出的組織作為 3D 模型的主動輪廓種子點可重建出頸 部各組織,如圖 1.5 所示,由左至右、由上到下分別是頸椎、下頜骨、舌骨、頸 靜脈、頸動脈、胸鎖乳突肌。但由於淋巴結沒有明顯的對比度,若要尋找異常淋 巴或是腫瘤並不適用於此種方法。 偵測腫瘤亦有不使用組織定位而直接進行可疑腫瘤偵測,2004 年 Matei 等人 的研究[4]運用了對稱性的原理,提出一種快速自動偵測頸部 CT 影像中可疑腫瘤 位置的方法,首先將整張影像的灰階值設定成 12 種,利用非對稱性的特性重建 出另一張影像,再與原影像相加,所得的結果經過影像斷開及中值濾波後,可疑 腫瘤位置將顯得較明顯,此方法簡單且快速,但無法精確的找出腫瘤大小及模 樣,且依據每個人的對稱性對實驗結果影響甚大。 從複雜的頸部 CT 影像中偵測出可疑的異常淋巴是非常困難,然而異常淋巴
或腫塊有較平滑的紋理且通常為圓形,根據此兩種特性利用紋理分析以及特徵抽 取更是較建議的方向,在外形的抽取中,如 2007 年 Ji-Xiang Du 等人的研究[5] 使用了各種不同的幾何特徵,用以描述外型輪廓。而如何抓取出可疑目標,並判 斷是否為可疑的異常淋巴或是病灶,將是本論文要克服的難題。 (a) (b) (c) (d) (e) (f) (g) (h) (i) (j) (k) (l) 圖 1.5 三維重建結果圖。(a)~(c)及(g)~(i)為動態閥值分割結果;(d)~(f)及(j)~(l) 為 3D 主動輪廓結果。
1.4 論文主體與貢獻
本論文以開發一適用於頸部 CT 影像異常淋巴或腫瘤偵測之演算法為主,在 接下來的章節將詳細介紹,其中第二章介紹與本論文相關的技術及原理,在第三 章將介紹本論文所提出的系統流程,第四章則為本論文提出方法之實驗結果與分 析,第五章則是本論文所提出方法之結論。 本論文利用影像處理與資訊技術的方式,不但活用前人所使用的紋理分析, 更提出新的方法,其貢獻如下所示: 1. 本論文提出一適用於頸部 CT 影像的分析方法,可以解決頸部 CT 影像中組織 的分區或是減少組織分辨錯誤的缺點,改善並獲得較佳的分區結果。 2. 提出一協助醫師診斷的電腦輔助診斷方法雛形,並將偵測結果可顯示於醫 師,為醫師提供了額外的醫學分析。第二章 相關技術與原理
本章將介紹與本論文使用的系統之相關技術與原理,在處理頸部 CT 影像中 有四個主要的步驟:紋理分析、分區、合併及特徵抽取。本章節將分為四節,在 2.1 節將介紹本論文所使用的影像處理技術,在 2.2 節則介紹紋理分析中使用的 小波轉換,而在 2.3 節將介紹常用於分割的均值移動演算法,本論文使用均值移 動演算法對頸部 CT 影像中的組織進行分區,2.4 節將介紹本論文區塊合併時所 使用的區域成長演算法。2.1 影像處理技術
在處理影像的研究中,有許多技術皆已應用到各種形態的影像,如二值影像 (binary image)、灰階影像和彩色影像,而有許多技術或方法都會使用到影像二值 化,在某些影像上,由灰階轉換為二值影像時,可將其簡單化並抽取特徵;而在 複雜影像需要區分不同區塊或抓取相同特徵的相鄰像素時,連通元件標記 (connected component labeling)可將影像中符合條件的像素標記成相同編號。本論文將在 2.1.1 節中介紹影像二值化原理,於 2.1.2 節介紹連通元件標記原 理。
2.1.1 影像二值化
灰階影像相較於二值影像不一定比較好,計算量也往往較大,以至於所需要 的時間也較長,在許多影像處理技巧中,常需要將影像轉換為二值影像,如形態 學分析、連通元件標記等。而影像二值化是將影像的灰階度轉換為黑、白兩色, 利用設定閥值(threshold)的方式,以該閥值為界,將灰階影像的灰階值分為兩部分,一部分為大於等於閥值的像素群,另一部分為小於閥值的像素群,分別將兩 群的值設定為 255 及 0,如(2-1)式所示,其中 f x y( , )為原始影像,g x y( , )為二值 影像。 255 ( , ) ( , ) 0 ( , ) f x y Threshold g x y f x y Threshold (2-1) 然而,一張圖的直方圖(histogram)常常應用於二值化閥值的挑選,尤其當影 像中有兩區明顯的灰階值分布,則閥值設為兩區灰階度的中間值較佳,如下圖 2.1 所示。 (a) (b) (c) 圖 2.1 影像二值化。(a)原始影像;(b)原始影像的直方圖;(c)二值影像。
2.1.2 連通元件標記
在探討連通元件標記前,需了解像素(pixel)間的近鄰(neighbors),如一張影 像以 f x y( , )來表示,在座標( , )x y 的位置中,我們稱之為像素p,而此像素的的上 下左右鄰近的像素則為 f x y( , 1)、 f x y( , 1)、 f x( 1, )y 、 f x( 1, )y ,如圖 2.2 (a) 所示,我們稱之為p的 4 近鄰(4-neighbors),以N4( )p 表示。 而 除 了 在 f x y( , )的 水 平 及 垂 直 四 方 鄰 近 點 外 , 再 加 入 對 角 鄰 近 點 ( 1, 1) f x y 、f x( 1,y1)、f x( 1,y1)、f x( 1,y1),如圖 2.2 (b)所示,則我們稱 之為p的 8 近鄰(8-neighbors),以N8( )p 表示。( , 1) f x y ( 1, ) f x y f x y( , ) f x( 1, )y ( , 1) f x y ( 1, 1) f x y f x y( , 1) f x( 1,y1) ( 1, ) f x y f x y( , ) f x( 1, )y ( 1, 1) f x y f x y( , 1) f x( 1,y1) (a) (b) 圖 2.2 像素間的近鄰。(a) 4 近鄰的像素;(b) 8 近鄰的像素。 接著我們將介紹像素間的連通性(connectivity),藉由像素間的近鄰關係,我 們將可判斷像素間是否連通,而判斷的準則將依照採用 4 近鄰或 8 近鄰的方式而 有所不同,符合前者相鄰且灰階值相同的像素,我們稱 4 連通,符合後者相鄰且 灰階值相同的像素,我們稱 8 連通,如圖 2.3 所示。 1 1 0 1 0 0 0 1 1 G 1 1 0 1 0 0 0 1 1 (a) (b) 圖 2.3 像素間的連通。(a) 4 連通;(b) 8 連通。 而在連通元件標記是利用連通元件在二值影像中相連且灰階值相同的像素 標示成相同的標記(labeling),如此一來我們將清楚了解哪些相連的像素被劃分為 同一區塊,也藉此知道每一個連通區塊的像素量,並藉由標記的個數推知該張影 像中有幾個分離的區塊。本論文將採用 8 連通的方式進行連通元件標記,圖 2.4 為連通元件標記例子。
(a) (b)
圖 2.4 8 連通的連接元件標記。(a)原始影像;(b) 8 連通標記結果。
2.2 小波轉換
影像的分析方式可分為空間域(spatial domain)和頻率域(frequency domain)的 影像資料,其中常見頻率域的轉換方式有傅立葉轉換(Fourier transform , FT)、離 散餘弦轉換(discrete cosine transform, DCT)、離散小波轉換(discrete wavelet transform, DWT);在許多影像中一些邊緣或是重要特徵只出現在影像的局部,對 離散餘弦轉換的描述來說將不易表示;而傅立葉轉換在影像穩定變化時,可有效 的完整的分析描述,但在局部有劇烈變化時,則需要大量的頻譜以描述該特徵; 然而,離散小波轉換所使用的基底函數(basis function)大小不是固定的,並可進 行多解析度(multiresolution)的影像分析,比其他兩者更適合應用在局部性的資料 分析。此外,小波轉換的應用常見於影像編碼、紋理分析、邊緣檢測、雜訊去除 和影像壓縮等功能上,均有很好的成效。
2.2.1 基底函數
在此先以一個例子解說[6],假設a、b為相鄰的兩個數位訊號,若我們將a、 b合成兩個數值c、d,則我們可以利用c、d還原成a、b,例如(ab) / 2c, (a b ) / 2d,則經過運算後我們可得c d a,c d b,以此例子來說,c為a、b的平均值,d為a、b的差異值,而在影像處理中平均值可視為低頻訊號,差異 值可視為影像的高頻訊號,如邊緣特徵,而此例子就像小波轉換一樣,抽取出影 像中低頻與高頻資訊。 在多解析度的分析中,小波轉換利用線性代數的向量空間(vector space)理 論,在此向量空間中定義不同尺度的基底函數,而任一函數均可分解成基底函數 的線性組合;在小波轉換中我們將基底函數分為兩類:尺度函數(scaling function) 與小波函數(wavelet function),藉由尺度函數我們可以表示函數局部的大致變 化,而小波函數可以表示函數局部的微小變化,也就是說尺度函數值相當於平均 值,而小波函數值相當於差異值,而使用不同尺度的尺度函數可分解成不同解析 度的尺度函數及小波函數,一個尺度函數可以再分解成解析度低一階的尺度函數 和小波函數,所以小波轉換可視為使用不同尺度的尺度函數及小波函數之線性組 合。 在此定義原始信號或影像為第n階,接著解析度少一半稱為n1階,以此類 推表示法為n, n1, n2, n3, …,另一種則為 0, 1, 2, 3, …,在理論講解上我 們採用第一種方式。根據文獻[7],由實數的平方可積分函數( )x 之整數位移和實 數二元尺度組成的展開函數集合,即集合
j k, ( )x
,如(2-2)式所示, / 2 , ( ) 2 (2 ) j j j k x x k (2-2) 其中對於所有的 j k, Z和( )x L R2( )都成立,L R2( )代表可量測且平方可積分之一 維函數的集合,而k决定j k, ( )x 在x軸上的位置,j决定了j k, ( )x 沿著x軸的寬度, 而 /2 2j 控制j k, ( )x 的振幅大小。因為j k, ( )x 的形狀隨 j改變,所以( )x 稱之為尺度 函数。適當的選擇( )x ,
j k, ( )x
可以延展出所有可量測的平方可積分函数的集 合。我們定義Vj為第 j階向量空間,而j k, ( )x 是一個Vj向量空間的基底函數,且 不同階的向量空間滿足(2-3)式包含的關係,即較低尺度的尺度函數所延展出的子空間被包含於較高尺度下所延展出的子空間。 0 1 2 3 4 V V V V V (2-3) 此外,我們定義一個小波函數( )x 連同其整數位移和二元尺度調整,延展出 任意兩個鄰近尺度子空間Vj和Vj1之間的差,即集合
j k, ( )x
,如(2-4)式所示 / 2 , ( ) 2 (2 ) j j j k x x k (2-4) 其中對於全部的kZ,且延展出Wj空間,而Wj 和Vj是Vj1空間中的正交互補 (orthogonal complement)子空間,關係如(2-5)式: 1 j j j V V W (2-5) 相當於j k, ( )x j k, ( )x 則形成Vj1子空間的基底,且任一尺度函數j k, ( )x 與任一小 波函數j k, ( )x 正交。2.2.2 離散小波轉換
在介紹離散小波轉換時[8],我們使用低通濾波器(low pass filter)以及高通濾 波器(high pass filter)來取代基底函數,且由於小波轉換只需要保留低頻數列與高 頻數列裡的一半資訊即可以達到還原的效果,我們選擇二分之一的抽樣(sampling) 即可求得離散小波轉換,如圖 2.5 所示,輸入原始數列後分別使用低頻濾波器與 高頻濾波器進行資料分析,再進行降低取樣(down-sampling),即可完成小波分 解;反之,將小波分解後的數列執行提高取樣(up-sampling),再進行低頻濾波器 以及高頻濾波器分析後即可還原成原始數列,其中降低取樣為保留數列中的偶數 項,提高取樣則將小波分解後保留下來的資料放置偶數項,奇數項補零。
原始數列 低頻濾波器 高頻率波器 2↓ 2↑ 2↓ 低頻濾波器 高頻率波器 原始數列 2↑ 低 頻 數 列 高 頻 數 列 分解 合成 圖 2.5 一維離散小波轉換。 在介紹完一維離散小波轉換,很容易可以將原理延伸到像影像這種二維的函 數上,二維離散小波轉換即為對二維影像的水平方向和垂直方向做一維的小波轉 換並採用取樣即可得到二維的離散小波轉換。在分解的部分如圖 2.6 所示,首先 輸入一個二維的原始影像,在水平方向經過低通濾波器之資料分析後,再進行降 低取樣,將會得到影像低頻的資訊,我們稱之為 L,而在水平方向經過高通濾波 器之資料分析後,再進行降低取樣,將會得到影像高頻的資訊,我們稱之為 H; 接著進行垂直方向的部分,將 L、H 分別進行低頻濾波器與高頻率波器分析並降 低取樣後,結果分別為影像近似 LL、影像水平的細節 LH、影像垂直的細節 HL、 影像對角的細節 HH。 原始影像 低頻濾波器 2↓ 水平低頻 (L) 低頻濾波器 高頻率波器 2↓ 2↓ 影像近似 (LL) 重直細節 (LH) 高頻濾波器 2↓ 水平高頻(H) 低頻濾波器 高頻率波器 2↓ 2↓ 水平細節 (HL) 對角細節 (HH) 水平方向 垂直方向 圖 2.6 二維小波分解。
反之,在二維離散小波轉換合成的部分,在垂直方向先進行提高取樣後,進 行低頻濾波器與高頻濾波器,接著進行水平的部分,將會得到二維原始影像,如 圖 2.7 所示。 原始影像 低頻濾波器 水平低頻 (L) 低頻濾波器 高頻率波器 2↑ 影像近似 (LL) 重直細節 (LH) 高頻濾波器 水平高頻(H) 低頻濾波器 高頻率波器 水平細節 (HL) 對角細節 (HH) 水平方向 垂直方向 2↑ 2↑ 2↑ 2↑ 2↑ 圖 2.7 二維小波合成。 在影像中邊緣的些許變化人眼不易察覺,因此二維影像常應用於在二維離散 小波分解,以讀取影像的平滑區域以及細節部分,但有時一些緩慢變化的特徵, 要在多尺度下才容易發現。此在進行一次的小波分解後,亦可對第一次小波分解 後的平滑地區進行第二次小波轉換,第一次的小波轉換我們稱之為一階小波轉 換,第二次小波轉換稱為二階小波轉換,其概念如圖 2.8 所示。LL1 代表一階小 波轉換的低頻影像,將其再次進行小波轉換即會得到 LL2、LH2、HL2、HH2 四 張解析度較低的二階小波轉換影像,此概念可推廣至更高階,圖 2.9 為二維離散 小波轉換的例子。
LL1 影像近似 HL1 水平細節 LH1 垂直細節 HH1 對角細節 LL2 影像近似 HL2 水平細節 HL1 水平細節 LH2 垂直細節 HH2 對角細節 LH1 垂直細節 HH1 對角細節 (a) (b) 圖 2.8 二維不同階數的小波轉換。(a)二維一階小波轉換;(b)二維二階小波轉換。 (a) (b) (c) 圖 2.9 二維離散小波轉換實例。 (a) 原始影像;(b) 一階轉換;(c) 二階轉換。
2.3 均值移動演算法
在本節將介紹均值移動演算法(mean shift algorithm),此演算法概念最早於西 元 1975 年由 Fukunaga 和 Hostetler 所提出關於概率密度梯度函數的估計[9],其 最初的意義就是偏移的均值向量。在西元 1995 年 Yizong Cheng 定義了一組核函
數並引進了一個權重的觀念[10],使得距離不同的資料點重要性不一,對均值偏 移向量貢獻也隨之不同,此一改變推廣均值移動演算法的適用範圍,另外 Yizong Cheng 亦介紹了各種應用的領域及具體例子,如分群、圖形識別、影像分割以及 物體追蹤等等。 均值移動演算法是一種非參數式的疊代演算法,先計算出當下的偏移均值向 量後,移動該點到該點的偏移均值,在以此點作為起始點再次計算,直到滿足條 件為止,此方法不但不需要事先知道分成幾類外,也沒有形狀上的限制,利用此 技巧可以運用在尋找各種複雜形狀的群集之中。 我們將影像中的像素轉換為特定維度的資料點,並運用這些資料點分布中的 梯度(gradient)變化估出偏移均值向量。由文獻[11],我們假設有n筆資料點xi, i=1,2,3,…,n,其資料分布於d維度的空間Rd中,再利用多變量核K x( )及固定窗 口半徑為h,可以得到多變量空間下和密度估測f x( ),如(2-6)式所示。 1 1 ( ) ( ) n i d i x x f x K h nh
(2-6) 2 , ( ) k d ( ) K x c k x (2-7) 在此利用K x( )的輻射對稱的特性,可將K x( )表示為(2-7)式,其中cd k, 為正規 化常數,並確保K x( )的分布介於 0 到 1 之間;而在梯度變化為f x( )=0 時將滿足 ( ) f x =0 的特性,運用此一特性我們將(2-6)式改寫成(2-8)式: 2 , 2 1 2 ( ) ( ) ( ) n k d i i d i c x x f x x x g h nh
(2-8) 在此定義g s( ) k s( ), G x( )cg d, g x( 2)為新的多變量核依據定義,而梯度變化 ( ) f x 將可在展開為(2-9)式: 2 2 , 1 2 2 1 1 ( ) 2 ( ) ( ) ( ) n i i n k d i i d n i i i x x x g h c x x f x g x h nh x x g h
(2-9)其中,最後一項我們視為偏移均值向量mh: 2 1 2 1 ( ) ( ) ( ) n i i i h n i i x x x g h m x x x x g h
(2-10) 藉由以上的定義,我們可知均值移動演算法執行的流程為 1. 計算偏移均值向量mh(x )t 2. 利用遮罩視窗不斷的反覆計算 1 (x ) t t t h x x m 3. 直到所有起始點做均值移動運算至收斂條件為止 然而,在本論文之中將考慮區域性的組織,故採用選取帶寬(bandwidth)的模 式,其所指的是與當下中心的特徵距離在範圍內資料點偏移均值向量權重為 1 範圍外為 0 的方法進行均值移動演算,圖 2.10 為本論文採用的均值移動演算法 示意圖。 圖 2.10 均值移動演算法示意圖。2.4 區域成長演算法
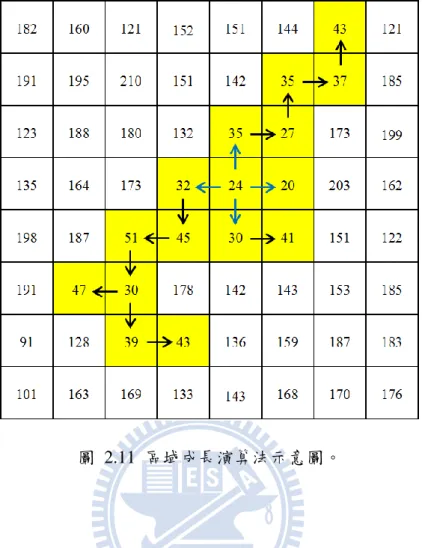
區域成長演算法在影像分割上是常見使用的方法之一,其基本概念為設定一 個種子點(seed point),如像素或區塊,以此種子點為區域成長的起點,藉由事先 定義的同質性(homogeneity)做為分割的標準,同質性可為特定的灰階值範圍、紋 理、色彩或平均強度等等的相似性,若鄰近的像素擁有相同的特性,則將該點附 加進此種子點集合進行區域成長,而當滿足特定條件後,則結束區域成長法。 簡單的來說,此演算法即以一個種子點為起點並使用定義好的條件使區塊生 長成更大的區域,其中增長的鄰近區域又可分為 4 近鄰增長及 8 近鄰增長兩種相 鄰的成長方向,如 2.1.2 節所介紹;然而,初始種子點的選定是個重要的決策點, 當分割的條件有面積的限制時,根據不同的初始點每次會有不一樣的結果,而種 子點我們可利用影像的直方圖特性去選擇,又或者可利用不同的成長準則使得結 果更佳完善。常見的成長條件為空間位置相鄰且灰階值相近的像素合併成同一區 域,如下式所示,假設R代表整個影像區域,f x y( , )為影像座標( , )x y 的種子點灰 階值,而Gi為Ri中的像素灰階值,若滿足條件(2-11)式: ( , ) f x y Gi T (2-11) 則將該點加入 f x y( , )的種子點集合,並進行該點的區域成長,直到此種子點集合 內的鄰近點均沒有滿足(2-11)式為止,其中T 為條件閥值,此指鄰近像素灰階值 的差異大小,如文獻[12],其演算法的示意圖如圖 2.11 所示。在此以種子點灰 階值 24 為初始點,利用 4 近鄰區域成長法為例,並設定T=20,由初始點開始向 外四邊尋找符合條件準則的像素,並將其歸納於種子點集合,進一步向外擴張搜 索,直到種子點集合與鄰近點的灰階值差均大於 20,即結束區域成長法,該種 子點集合即被分割成同一類。圖 2.11 區域成長演算法示意圖。
區域成長演算法在清晰的邊緣時有良好的分割結果,且可以同時使用多個成 長條件,然而區域成長演算法在本論文使用上較不同的是本論文採用區塊的平均 強度做為成長閥值的依據,判斷相連的各區塊的組織中平均強度是否相似,進而 合併成同一區塊,以降低影像的複雜度,並提升分區的正確性。
第三章 系統流程
在 CT 影像中,有許多器官病灶皆有精確的檢測方式,其中在頸部 CT 影像 之背景組織複雜並難以進行異常淋巴病變分析的情況之下,卻發展甚慢,只有少 數的研究文獻,全自動偵測的方法更是不成熟。基於種種的理由,本論文提出一 有效針對頸部 CT 影像分區及偵測系統,可抽取出疑似異常的淋巴、可疑病灶及 腫瘤或腫塊,詳細的方法將在本章說明。 本章共分成五節,3.1 節為系統架構圖,為大家說明本系統的完整流程;而 3.2 節將為大家介紹本系統如何對頸部 CT 影像擷取細節特徵;3.3 節將介紹影像 分區前所需要的前處理,以去除不必要的資料點,除了減少雜訊的干擾外,更利 於後續運算更加迅速;3.4 節為本系統的核心,利用一系列的方法進行影像組織 分區,使得各組織區分成不同的區塊;3.5 節則是針對分割出來的區塊進行特徵 抽取,並確認是否符合可疑區塊的條件。3.1 系統架構
本架構可分為四個部分,第一部分為影像輸入後進行小波轉換及收縮,以濾 除影像中的雜訊,並獲得影像的細節特徵,第二部分為影像前處理,由於頸部的 CT 影像複雜度極高,在獲得影像的邊緣細節後,我們可消除邊緣強度極大的方 式,削減許多不必要的資料點,其中更有許多小區塊或者可藉由灰階值的判斷以 消除不可能的目標物,第三部分為影像分區,除了初步分區外,更利用各區塊的 特性可進一步的分割及合併,第四部分為特徵抽取,將符合可疑區塊的目標物標 記出來,提供給醫師觀看,各部分的細節將於本章節後面有進一步的介紹,圖 3.1 為本系統架構的流程圖。輸入 影像 影像前處理 影像分區 進行區塊 特徵偵測 是否有異常 淋巴、病灶及 腫瘤或腫塊? 標記該圖 可疑區塊 不特別標記 是 否 進行小波轉換 及小波收縮 輸出 影像 開始 結束 圖 3.1 整體流程圖。
3.2 邊緣強度的抽取
鑒於異常淋巴及腫瘤其紋理平滑的特性,本系統採用二維離散小波轉換 (discrete wavelet transform, DWT),而小波轉換有許多不同的模式,本論文採用的 方法為的 1992 年由 Daubechies 所提出的小波轉換[13],在此採用 db1(同 Haar 小 波)對頸部 CT 影像進行小波轉換,圖 3.2 為 db1 的尺度函數及小波函數,其轉 換結果如圖 3.3 所示。 1 0 0.5 1 0.5 1 -1 1 0.5 0 0 (a) (b) 圖 3.2 Daubechies1 的基底函數。(a)尺度函數;(b)小波函數。 (a) (b) 圖 3.3 二維離散小波轉換。(a)原始影像;(b)小波轉換後的影像。
然而,在影像中的雜訊會影響小波轉換後的結果,在小波係數中,邊緣能量 可能集中在某些地方,而影像的雜訊卻佈滿了整張圖,利用閥值濾除的方式可降 低雜訊對小波影像的影響,以取得較佳的影像;在此我們採用小波收縮(wavelet shrinkage)的方法,根據文獻[14][15],小波收縮可分為兩種,一種為硬收縮(hard thresholding),其為(3-1)式,另一種為軟收縮(soft thresholding),其為(3-2)式: , ( , ) 0, u u t v u t (3-1) , ( , ) 0, , u t u t v u t u t u t u t (3-2) 其中u為原始係數,v為經過小波收縮後的係數,t為濾波閥值,圖 3.4 為小波收 縮的示意圖。 (a) (b) 圖 3.4 小波收縮示意圖。(a)硬收縮;(b)軟收縮。 由於軟收縮會降低本系統的小波係數,進而影響之後的分析實驗,故本論文 採用硬收縮的方式。 otherwise
3.3 影像前處理
本章節將介紹進行分區前的影像處理,首先藉由小波轉換後的影像進行初步 的修正,先去除強烈邊緣的區域,再將不可能的異常淋巴及腫瘤之灰階值範圍去 除,並把影像中小區塊濾除,以減少組織干擾及雜訊的影響,圖 3.5 為影像前處 理的流程圖。 濾除低頻影 像中的強烈 邊緣 灰階濾波 面積濾波 低頻影 像輸入 影像 輸出 細節影像修 正以取得紋 理特徵 細節影 像輸入 圖 3.5 影像前處理流程圖。3.3.1 紋理分析
在計算小波影像的邊緣強度強化,有許多的方法可計算其紋理特徵[16],為 了獲得組織邊緣的紋理,本系統採用的讀取方法如(3-3)式: 2 2 2 ( , ) ( , ) ( , ) ( , ) K K LH HL HH m K n K E x y Wf x m y n Wf x m y n Wf x m y n
(3-3) 其中Wf x( m y, n)為小波係數,其中心點為( , )x y ,K為遮罩大小可依照 3×3 或 5 ×5 的方式,本論文採用一個範圍的紋理能量,而不是單一像素的能量,其強烈 邊緣如圖 3.6 所示。 圖 3.6 強烈邊緣影像。 接著,將平滑影像中去除對應於邊緣影像中能量過大區域,即將強烈邊緣的 位置濾除,使得平滑影像中的組織區分開來,如圖 3.7 所示。(a) (b) 圖 3.7 強烈邊緣的濾除。(a)平滑影像;(b)濾除強烈邊緣的平滑影像結果圖。
3.3.2 灰階值挑選及小區塊的濾除
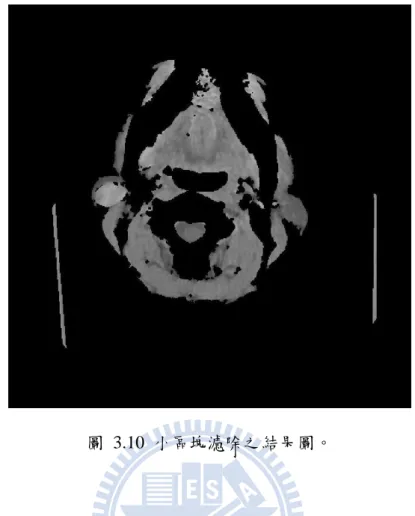
藉由紋理分析與修正結果,我們可得圖 3.7 (b)的結果圖,在此可知,由於 骨頭、血管的灰階值較大,且氣管灰階值較小,而異常淋巴、腫瘤及一般組織介 於灰階值的中間地帶,故我們採用 2.1.1 節所介紹影像二值化的方式將影像中不 可能出現異常淋巴或腫瘤的部分濾除,以削減影像的複雜度,如圖 3.8 所示。 圖 3.8 灰階值挑選結果。而在濾除了異常淋巴及腫瘤不可能出現的灰階度位置後,在此我們進行初步 的小區塊濾除,首先利用 2.1.2 節所介紹的連結元件標記將影像中各區塊進行編 號,再利用迴圈的方式將各區塊進行面積閥值的濾除,圖 3.9 為小區塊濾除之流 程圖。圖 3.10 為小區塊濾除之結果圖。 影像 輸入 連通元件 標記 取得區塊i 像素值總數 該區塊的 像素值總數是否 大於閥值? 是否跑過 所有區塊? 保留該區塊 濾除該區塊 是 否 影像 輸出 是 否 i = i + 1 圖 3.9 小區塊濾除之流程圖。
圖 3.10 小區塊濾除之結果圖。
3.4 影像分區
在本節將介紹如何將影像進行分區,進而將各組織區分開來,以利於異常淋 巴及腫瘤的特徵抽取。鑒於 2.3 節所介紹的均值移動演算法之分區方式將出現兩 大問題,第一個問題為該方法的初始點會影響整張影像的分區結果,第二個問題 為當均值移動法的帶寬大小將對分區的結果產生嚴重的劇變,若是太大的話,將 會把不同區塊的組織是為同一類,如圖 3.11 (a)所示;若是太小的話,則將會把 同一塊組織區分成多塊組織,如圖 3.11 (b)所示。 針對以上的問題,本論文提出一系列的分區演算法進行修正,本系統的分區 演算法可分成三個部分,第一部分為影像的粗分區,藉由適當的帶寬將影像先進 行初步的分區,第二部分為影像的細分區,將粗分區產生的結果分析,判斷區塊 是否需要進一步的分區,第三部分為區塊合併,將影像中分成許多區塊的區域判 斷是否屬於同一塊,並將其合併成同一區塊,圖 3.12 為分區演算法之流程圖。(a) (b) 圖 3.11 帶寬不適合的情況。(a) 帶寬過大;(b) 帶寬過小。 前處理後 的影像 影像粗分區 影像細分區 區塊合併 輸出 各區塊 圖 3.12 分區演算法之流程圖。
3.4.1 影像粗分區
本論文在粗分區的階段採用均值移動演算法,其流程如圖 3.13 所示。 從輸入矩陣中, 隨機選擇一個起 始點,並設定為 當下中心點 找出與當下中心 特徵距離小於帶 寬的點群 重新計算該點群 的中心,並設為 下一中心點 下一中心點與 當下中心點的距離 是否小於閥值? 紀錄此次分類 過程所經過的 全部點,並儲 存至矩陣 當下中心點等於 下一中心點 否 每點將被分類至 被經過最多次的 類別 是 將此次的資料 合併至與中心 過近的類別 否 是 否 是否與其他類 中心距離過近? 是 是否每個點 均被分類過? 資料 輸出 資料 輸入 圖 3.13 均值移動演算法之流程圖。其中我們所使用的分區特徵有位置、影像強度、邊緣紋理能量,即x、y、 ( , ) g x y 、E x y( , ),同時採納了不同權重(weight)進行修正;基於均值移動演算法的 帶寬會影響分區的結果,需注意不能將帶寬設定太小,否則將會把影像區分成許 多區塊進而影響系統運作速度,在此將選用一適當的帶寬,將影像區分開來。 由於我們採用的資料點中有邊緣強度較強的資料,故在執行完第一次分區的 結果於邊緣地帶仍會產生許多小雜點自成一區,如圖 3.14 所示。 圖 3.14 經過均值移動演算法的結果圖。
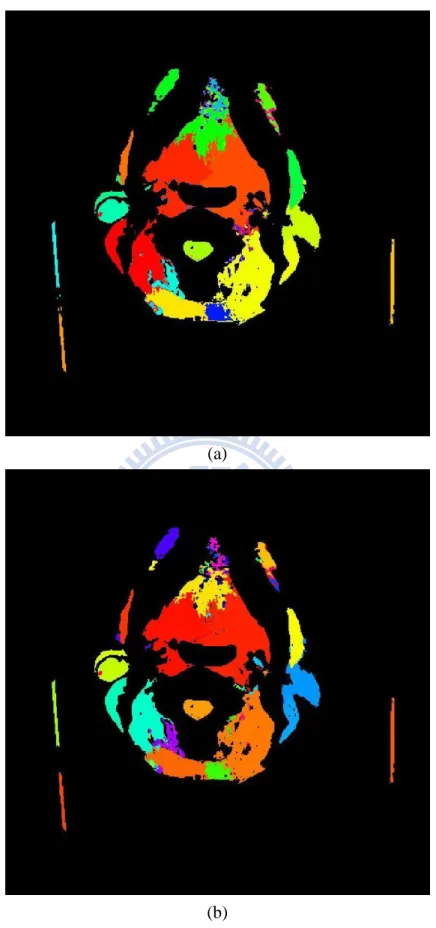
在此階段我們將利用濾除小區塊的方式進行小雜點的去除,其結果為初步的 分區結果,我們稱之為粗分區,如圖 3.15 所示。此外,由於輸出結果我們設定 為一類一個灰階值,但分區結果的總區塊之多,造成色覺上的不明顯,我們將附 上分區結果彩色圖,以利於觀看結果。 (a) (b) 圖 3.15 粗分區結果圖。(a)粗分區結果灰階圖;(b)粗分區結果彩色圖。
3.4.2 影像細分區
在經過粗分區後,我們將發現兩個情況需克服,第一個狀況為在分區成同一 區塊內,雖然組織皆有相連且無明顯邊緣,但可看出此區塊內組織複雜,及灰階 值變異度大,可有機會再區分成兩個不同的區塊;第二個狀況為兩個不同組織其 距離相近但不相連的部分組織會被區分成同一塊,用肉眼即可發現此一狀況,如 圖 3.16 所示。(a) (b) 圖 3.16 狀況圖。(a)原始影像;(b)狀況區域。 為了消除以上的困擾,本系統將進行細分區,針對第一種狀況,我們藉由量 測區塊的變異度(variance)大小來判斷該區塊是否需要再分區,其運算法如(3-4) 式所示: 2 2 1 1 ( ) 1 n i i X X n
(3-4) 其中, 1 1 n i i X X n
(3-5) 而Xi為各點的灰階度,X為該區塊的平均灰階值,n 為該區塊的資料點個數。當 區塊的變異度過大時,我們將該區塊進行較小帶寬的均值移動演算法將其再次分 區,以確保該區塊沒有誤將其他組織合併進來。 至於第二種狀況,我們將利用連通元件標記的方法,將分離的不同組織而被 分成同一塊的狀況區分開來,圖 3.17 為細分區的流程圖。細分區的結果圖如圖 3.18 所示。粗分區 影像 該區塊再次 進行均值移動 演算法 利用連通元件 標記記錄區塊j 輸出細分 區影像 該區塊變異度 是否過大? 區塊j是否有 相離的部分? 取得區塊i 的變異度 是否跑過 所有區塊? i = i + 1 是否跑過 所有區塊? j = j + 1 將分離的部分 自成一區,並 濾除小區塊 否 是 否 是 是 否 否 是 圖 3.17 細分區流程圖。
(a)
(b)
圖 3.18 細分區結果圖。(a)變異度過大之細分區結果;(b)連通元件標記之細分區 結果。
3.4.3 區塊合併
在細分區的結果中,我們將可發現不相連的區域皆已分成不同區塊,但是在 部份相連的區塊,由於有些局部區域會發生分割過於零碎,使其本該屬於同一塊 組織,卻被區分成不同區塊,在此將針對此狀況進行區塊合併,將原本屬於同一 個體的部分合併成同一區塊,現象如圖 3.19 所示。 (a) (b) 圖 3.19 有可能需要合併的狀況。(a)原始影像;(b)可合併之可能區塊。 在此我們採用各區塊的影像平均強度及區塊間是否相連來判別兩區塊是否 可視為同一類,其概念我們將使用 2.1.2 節及 2.4 節的方式來進行合併。首先利 用連通元件標記的概念來判斷區塊間是否相連,若是相連則再判斷兩區塊的影像 平均強度是否相近,若是符合所定義的範圍內則利用區域成長演算法的方式進行 成長,以延伸出去的區塊做為初始區塊向外搜索,直到所有區塊皆已完成為止。 在此我們亦會發現有些小面積區塊的平均強度與相連區塊有所差異,若是去除或自成一類,有可能破壞掉可疑區域的完整性,故本論文將小面積區塊歸納於相連 最大面積的區塊,其流程圖如圖 3.20 所示。圖 3.21 為合併後的結果圖。 選定起始種子 區塊並計算其 平均強度 搜索相連區塊 並計算平均強度 平均強度差是 否小於閥值? 合併區塊並將 要合併的區塊 當新的種子點 是否跑過 所有區塊? 將小區塊合併至 相連的最大區塊 輸出 合併影像 輸入細 分區影像 否 是 選定下一區塊 是 否 圖 3.20 合併流程圖。
(a) (b) 圖 3.21 合併結果圖。(a)相連區塊且平均強度相近之合併;(b)小區塊合併。 最後,我們將獲得較完整且符合其組織結構及紋理的的區塊,進而針對各區 塊進行分析。
3.5 特徵抽取
藉由影像分區後的結果,我們可得到各區塊的資訊,在此我們利用異常淋巴 及腫瘤為圓形的形狀特徵,進行面積濾波及幾何特徵抽取;如文獻[5]所介紹, 在幾何特徵中有許多的描述子,其中我們採用了形狀因子(form factor)及圓度 (circularity)來描述區塊的外形,其形狀因子公式如(3-6)式所示: 2 4 ROI ROI A F P (3-6) 其中,F代表區塊的形狀因子,AROI代表區塊的面積大小,PROI代表區塊的周長 大小,對圓形來說,此量測值為 1,對方形來說,量測值為 4 。而圓度公式如(3-7)式所示: R R C (3-7) 其中R所代表的是區塊中心到區塊邊緣的平均距離,而R所代表的是平均距離 的均方差,如(3-8)式所示。 1 0 1 2 0 1 ( ) ( , ) 1 ( ( ) ( , ) ) N R i i i N R i i R i x y x y N x y x y N
(3-8) 其中,N為區塊內的像素個數,( , )x y 為區塊中心點。 我們可藉由面積、形狀因子、圓度三種特徵來抽取可疑區塊的大小、外形, 進一步的分析是否符合可疑區塊,如圖 3.22 紅色區塊所示,其面積大小為 671 個像素,形狀因子為 1.0213,圓度為 2.7494。 (a) (b) 圖 3.22 特徵抽取示意圖。(a)原始影像;(b)符合可疑區塊特徵的結果。第四章 實驗結果與分析
在本章節將討論本論文所提出的異常淋巴偵測系統對於頸部 CT 影像之偵測 結果分析,在 4.1 節將介紹本論文的研究資料來源及效能評估的方法,4.2 節將 介紹本系統對頸部 CT 影像的實驗結果分析,4.3 節將對實驗結果進行討論。4.1 實驗機制
在 4.1.1 節中,我們將會介紹本論文中所採用的研究資料以及研究中所使用 的軟硬體,而 4.1.2 節中,我們將介紹本實驗效能評估的方式。4.1.1 研究資料來源及硬體設備
本論文藉由申請國泰綜合醫院人體試驗研究計畫,採用國泰醫院的醫療資訊 系統(hospital information system, HIS)之研究資料;本論文使用病人之頸部 CT 影 像樣本進行測試,共 8 個案例,204 張影像,其中影像範圍為頸椎之間,即頸部 CT 影像中肺泡之上,鼻腔之下的影像序列,每張影像厚度 0.5 公分,間距 1 公 分;而在本論文程式開發及實驗所用的的硬體設備之中央處理器為 Intel(R) Pentium(R) D CPU 3.40GHz,記憶體為 1GB 的個人桌上型電腦,並使用軟體 Matlab R2010a 來撰寫自動偵測頸部異常淋巴之程式以協助醫生診斷,其雛形介 面如圖 4.1 所示。圖 4.1 系統介面圖。
4.1.2 效能評估
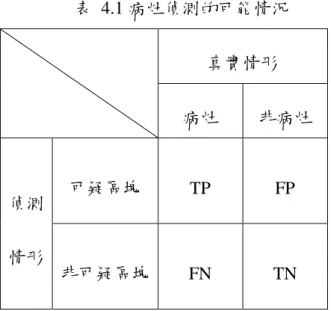
在效能評估的方式[17],本論文主要是尋找頸部 CT 影像中可疑的區域,在 醫師診斷時提供額外的輔助,根據偵測的結果可分為以下四種情況,如表 4.1 所示: 1. 正確肯定(true positives, TP):在此指所偵測到的可疑區塊全都是正確的病 灶,即成功偵測出真實病灶的位置。 2. 正確否定(true negatives, TN):在此指未偵測到可疑區塊的部分全都是正確 的,即未有病灶的位置皆無偵測出異常。 3. 錯誤肯定(false positives, FP):在此指非真實病灶的位置卻偵測出異常,即偵 測到錯誤的區塊。 4. 錯誤否定(false negatives, FN): 在此指出現真實病灶的位置病未偵測出異 常,即未偵測到真實的病灶。表 4.1 病灶偵測的可能情況 真實情形 病灶 非病灶 偵測 情形 可疑區塊 TP FP 非可疑區塊 FN TN 有了這四種偵測的結果後,便可以分析本系統應用的自動偵測病灶的情況; 然而本系統之輸出結果期望可給醫師提示以輔助醫師診斷,故為了不遺漏任何可 疑區塊的前提之下,本系統範圍及參數設定為任一可疑區域即抓取出來,以至於 本實驗結果之 FP 值將會偏高,此為本系統正常狀況,在此狀況下再交由醫師做 最後的判診。接著,本系統定義偵測真實病灶涵蓋率,其分母為所有真實病灶數, 分子為正確偵測出真實病灶的數量,如(4-1)式: 真實病灶涵蓋率 = TP 100% (4-1) TP+FN 當真實病灶涵蓋率為 100%的情況時,即代表在所有頸部 CT 影像中出現的 病灶都將正確的被偵測出來;然而,我們針對一系列的頸部 CT 影像序列處理時, 偵測到序列中的任一真實病灶區域並提醒醫師,醫師將針對該區塊進行影像序列 的細部診斷,故本系統將對有抓取出病例中真實病灶區塊的案件計數,其定義為 成功抓取病例案件率,其分母為所有病例的案件數,分子為有偵測到病例的案件 數,如(4-2)式: 成功抓取病例案件率 = 有偵測到的真實病例案件 100% (4-2) 所有真實病例案件
若是成功抓取病例案件率達到 100%,則代表每一個案件,我們都能找出一 個以上的真實病灶位置;反之,若是成功抓取病例案件率為 0%,則代表在每一 案件中皆沒有找出真實病灶的任一位置。
4.2 實驗結果分析
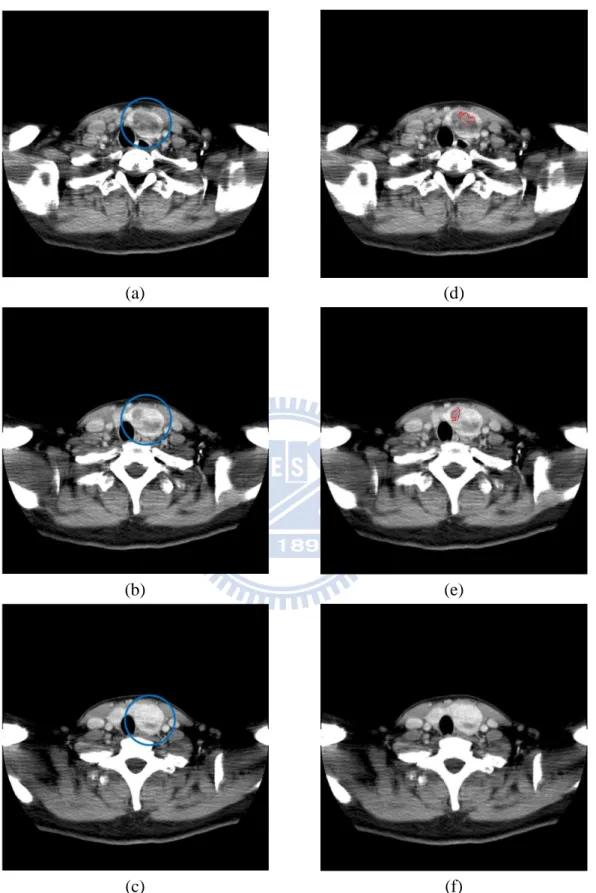
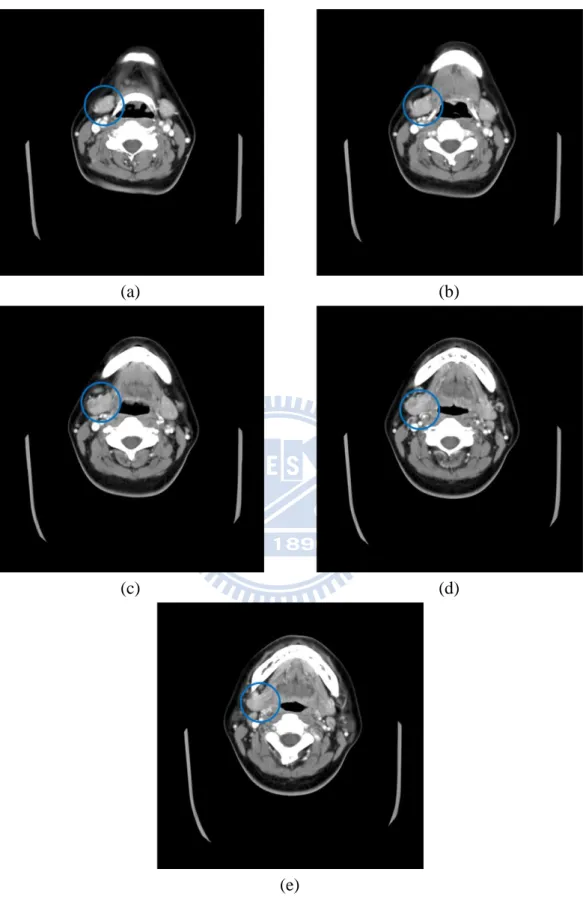
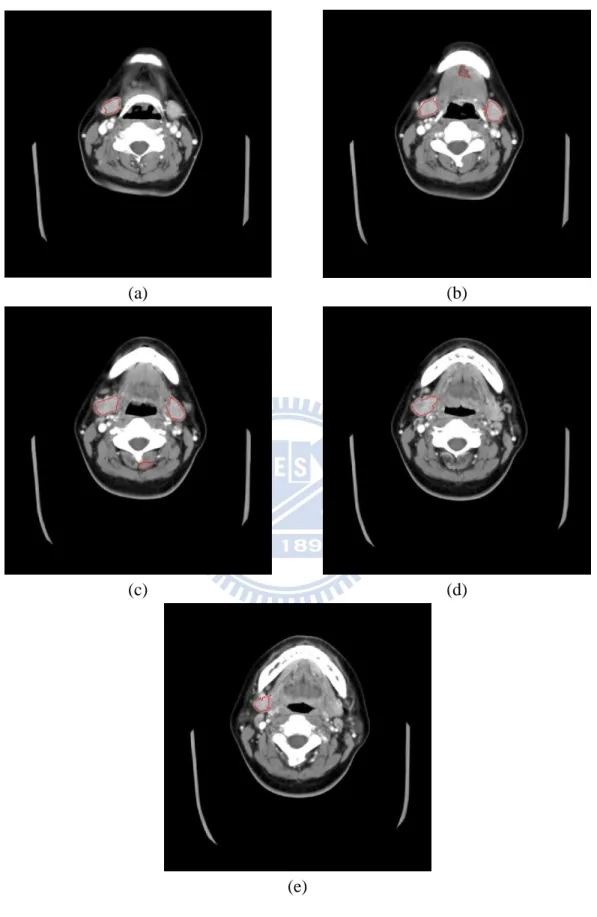
在本節當中,將介紹本系統實際應用在頸部 CT 影像中的實驗結果,我們藉 由合作醫師的專業知識了解真實病灶位置,再使用本論文所提出的演算法進行異 常淋巴偵測,在實驗展示中我們將挑出八筆病患資料並列出每一案件中含真實病 灶之影像序列,其中各案件中醫師所指出的真實病灶的影像為藍色圈圈內,而系 統自動偵測可疑區塊之結果為紅色線所圈起來的區域。 在案件一之中,如圖 4.2 所示,真實病灶位於病患的右耳下腺的位置,以看 本文的角度為左邊,本系統自動偵測異常區塊後我們與真實病灶做比對,可發現 案件一中可有效的把真實病灶抓取出來,除此之外亦有發現其他區域之可疑病 灶,也將隨之提供給醫師參考;然而,我們從圖 4.2 (h)中可發現,在進行電腦 斷層掃瞄中會有特殊情況如色散,此種狀況則將會造成本論文系統無法偵測正 確,進而影響結果。 在案件二之中,如圖 4.3 所示,真實病灶位於病患的左甲狀腺的位置,在此 案件之中我們發現真實病灶即有可能使得原始組織腫脹或變形,使得偵測難度增 加,儘管困難度增加,本系統仍可在組織與病灶的混合之中找出可疑區塊,進而 提示醫師,其中從圖 4.3 (f)中我們發現,當切片影像於病灶的上下邊緣時,所獲 得的病灶大小可能逐漸縮小,單看該張影像真實病灶的大小,難以分辨出此病灶 是否為可疑區塊,使得本系統無法正確的偵測出來。 在案件三之中,如圖 4.4 及圖 4.5 所示,真實病灶位於病患的右顎下腺的位 置,在此案件真實病灶與患者的顎下腺體纏黏在一起,使得本案件之顎下腺體一 同被抓取出來,但在真實世界中未開刀之前,也難以判斷兩者之間的相互作用,而在後三張圖結果圖中,我們較能清楚看出右側顎下腺多了一點可疑區塊,其中 在本案件中皆能有效的找出真實病灶大致位置。 在案件四之中,如圖 4.6 圖 4.7 所示,真實病灶位於病患的左顎下腺的位 置,但相較於其他案件,案件四真實病灶的灰階值與周遭組織的差異非常不明 顯,在此情況之下將造成本系統難以判斷,如分區的過程之中因為真實病灶灰階 值與周遭組織太過於相近,使得在分區階段與周遭組織分成一類,進而產生不規 則形狀,以至於本系統無法偵測為可疑區塊。 在案件五之中,如圖 4.7 及圖 4.8 所示,本病患的所罹患的疾病為左頸惡性 腫塊,其特徵非常的明顯,本系統自動偵測之結果也非常明確的標出所有病灶, 但此案件中部分的顎下腺體,與真實病灶相像以至於也被判斷成可疑區塊。 在案件六之中,如圖 4.9 及圖 4.10 所示,真實病灶位於病患的右耳下腺的 位置,而其病灶雖用肉眼看的出來,但其與肌肉相連且灰階值相近及邊緣強度較 弱,在分區的過程中會把組織與相連肌肉分成同一區,以至於此案件在偵測可疑 區塊時,無法正確的將真實病灶挑選出來,只能偵測出幾張與肌肉分離較明顯的 影像。 在案件七之中,如圖 4.11 所示,真實病灶位於病患的左顎下腺的位置,在 此案件中有灰階值不明顯的情況,如圖 4.11 (a);以及病灶紋理異常的情況,如 圖 4.11 (c),在這些情況之下將無法明確的把真實病灶偵測出來,但真實病灶中 亦有明顯的切片,則本系統即可順利將可疑區塊標示出來。 在案件八之中,如圖 4.12 所示,真實病灶位於病患的右側甲狀舌骨的位置; 然而,位於甲狀腺位置的病灶常頸部構造,更可能產生變形,如圖 4.12 (a)(b) 中其病灶已成橢圓形,本系統便誤會將其判斷為非可疑區塊,但病灶亦有較嚴重 及呈現較圓的區塊,本系統仍可將其判斷出來,如圖 4.12 (g)(h)。
(a) (e) (b) (f) (c) (g) (d) (h) 圖 4.2 案件一。(a)~(d)為案件一含醫師標記之原始影像序列;(e)~(h)為案件一之 系統偵測結果圖。
(a) (d)
(b) (e)
(c) (f)
圖 4.3 案件二。(a)~(c)為案件二含醫師標記之原始影像序列;(d)~(f)為案件二之 系統偵測結果圖。
(a) (b)
(c) (d)
(e)
(a) (b)
(c) (d)
(e)
(a) (d)
(b) (e)
(c) (f)
圖 4.6 案件四。(a)~(c)為案件四含醫師標記之原始影像序列;(d)~(f)為案件四之 系統偵測結果圖。
(a) (b)
(c) (d)
(e) (f)
(a) (b)
(c) (d)
(e) (f)
(a) (b)
(c) (d)
(e) (f)
(g) (h)
(a) (b)
(c) (d)
(e) (f)
(g) (h)
(a) (d)
(b) (e)
(c) (f)
圖 4.11 案件七。(a)~(c)為案件七含醫師標記之原始影像序列;(d)~(f)為案件七 之系統偵測結果圖。
(a) (e) (b) (f) (c) (g) (d) (h) 圖 4.12 案件八。(a)~(d)為案件八含醫師標記之原始影像序列;(e)~(h)為案件八 之系統偵測結果圖。
由以上結果可知,本實驗將頸部 CT 影像中的複雜組織透過本系統自動偵測 後的結果,我們可看出大部分的異常區塊皆會被本系統挑選出來,而針對每一案 件所得到的實驗結果如表 4.2 所示。 表 4.2 實驗結果表 案件 真實病灶張數 症狀 真實病灶涵蓋率(%) 1 4 右耳下腺腫瘤 75.00% 2 3 左甲狀腺腫瘤 66.67% 3 5 右顎下腺腫瘤 100% 4 3 左顎下腺腫瘤 0% 5 6 左頸惡性腫塊 100% 6 8 右耳下腺腫瘤 33.33% 7 3 左顎下腺腫瘤 33.33% 8 4 右側甲狀舌骨囊腫 50.00% 經過以上的探討,本論文統整出系統的真實病灶涵蓋率為 58.33%,以及成 功抓取病例案件率為 87.5%。
4.3 實驗結果討論
在完成本實驗後,我們發現各案件中的真實病灶涵蓋率變化很大,其中一個 原因為隨著病患的病灶大小將會影響頸部 CT 影像中出現真實病灶影像張數,而 真實病灶的影像張數並非許多,在一個案件之中,真實病灶通常只有三到五張的 影像序列,其中只要有一張影像尚未偵測到真實病灶,將造成此案件的真實病灶 涵蓋率有劇烈變化;另一個原因則是由於每個案件的狀況不一樣,且並不是每張 頸部 CT 影像的真實病灶明顯度都很高,造成在不同案件之中,實際有效的真實病灶影像數量不同,導致各案件之間真實病灶涵蓋率變化大;然而,本論文在每 個案件之中,幾乎都可偵測出至少一張真實病灶的影像,如此在真實病灶難以辨 識的影像序列之中,若偵測出一張真實病灶的影像,即可以提醒醫師注意此區塊 的組織變化,以達成本系統之輔助目的。 綜合以上案件,本論文所提出的系統整體之真實病灶涵蓋率為 58.33%,在此 將深入探討造成偵測錯誤的的主要原因,藉由本實驗的案件,我們提出以下四點 為造成本系統未成功偵測到真實病灶的主因: 1. 在各年齡層的人,均有可能會使用到斷層掃描技術,其中以中高齡年齡患者 居多,然而在部分長者可能因為個人因素,而需要在身體內安裝金屬性的輔 助物體,如假牙,但是在進行電腦斷層掃描時,若是身體內部有金屬物體將 使得 X 光產生色散,以至於我們所獲得的頸部 CT 影像中有強烈的影像雜訊, 如本論文案件一圖 4.2 (h)所示;針對 X 光色散的狀況,很有可能影響到真實 病灶部位的影像,使得病灶的紋理特徵或是灰階值大小受到不規則的影響, 此情況將對本論文所提出的系統造成很大的干擾,導致自動偵測的結果產生 錯誤的判斷,而在實際診斷的情況,醫師也將放棄此種類型的 CT 影像,以 避免誤判的情況發生。 2. 隨著腫塊或病變的地方不同,病灶也常與周邊組織或腺體纏黏,此種情況將 使得周遭組織腫脹以及外形改變外,也常因為組織的覆蓋造成真實病灶不明 顯或是病灶與組織混合再一起,導致其紋理形成不平滑的現象,同時灰階值 的變化也因此變得混亂,此狀況將造成本系統的偵測結果受到影響,進而誤 導本系統的偵測結果,如圖 4.3 案件二所示,其自動偵測的結果雖有局部的 真實病灶被抓取出來,但此機率依舊受限於病灶與組織的混合情況,並不能 確保每一個相似的情況皆可順利的偵測出來;此外,在案件八亦有真實病灶 變形的情況,如圖 4.12 (a)(b)所示,位於喉部的病灶常因周遭組織的形狀而 產生變形,使得系統判斷錯誤,但在病灶較明顯的影像仍可成功偵測出正確
的結果。 3. 在某些異常淋巴或腺體中,其病灶的灰階值與周遭組織十分相近,導致病灶 與組織的邊緣不明顯,在區分時有可能發生分區錯誤的現象,造成區塊誤判 為不規則狀,進而影響偵測結果,如圖 4.6 案件四所示,其病灶紋理及灰階 特徵不明顯,並與周遭組織交錯混合,使得系統無法自動偵測出此一真實病 灶。其中,最常見的例子為位於耳下腺的腫瘤或異常淋巴,此一區塊中由於 頸部肌肉常常會與耳下腺相鄰且灰階值相近,若在此區塊發生病變或有腫塊 時,容易造成將病灶與耳下腺或肌肉視為同一塊的情況,如案件六所示,該 病患的右耳下腺位置有一顆腫瘤,而此腫瘤與肌肉組織相鄰在一起,且灰階 特徵及紋理又極為相像,導致系統無法區分出來,針對此一狀況將需要再有 進一步的研究以解決此種情況。 4. 在大多數的病灶,其紋理平滑且外形屬於圓形,是醫師診斷病灶的方法,亦 是本系統自動偵測異常淋巴及腺體的依據,但在部分病患的病況中仍存在些 病灶內部紋理異常的情況,此一情況將導致系統無法將病灶區分出來,並將 其判斷為非可疑區塊,忽略了原本該挑選出來的真實病灶,如圖 4.11 (a)所 示,然而在腫瘤中心的切片影像通常是較明顯的影像,我們可將其抓取出來, 以提醒醫師該區塊仍屬於可疑區塊。 綜合以上四種情況,將會使得本論文之真實病灶涵蓋率下降許多,但在放射 治療之中有不清楚的影像是難以避免的,我們只能在有效影像中盡可能的偵測真 實病灶。 然而,由於病患在拍攝頸部 CT 影像時,真實病灶分佈於少數的幾張切片影 像,在這幾張影像之中,若本系統偵測到真實病灶中的任一切片影像時,即可提 醒醫師可針對其上下幾張影像進行觀察,亦使得醫師較容易發現病灶。經由本實 驗分析可得到本系統的成功抓取病例案件率為 87.5%,只有少部分的案件才完全 無法被本系統偵測出任一真實病灶位置,尤其是針對新任的醫師在經驗不足的情

![圖 4.1 系統介面圖。 4.1.2 效能評估 在效能評估的方式[17],本論文主要是尋找頸部 CT 影像中可疑的區域,在 醫師診斷時提供額外的輔助,根據偵測的結果可分為以下四種情況,如表 4.1 所示: 1](https://thumb-ap.123doks.com/thumbv2/9libinfo/8447055.182244/53.892.146.774.118.386/系統介在效能主要找頸影像中可疑的區域醫師診斷時提偵測結果可分.webp)