國 立 交 通 大 學
電控工程研究所
碩士論文
飛彈尾翼和側向推力複合控制系統設計
Blended Control System Design for Missile with Tail
and Lateral Thrust
研 究 生:汪言璋
指導教授:林清安 教授
飛彈尾翼和側向推力複合控制系統設計
Blended Control System Design for Missile with Tail and
Lateral Thrust
研 究 生:汪言璋 Student: Yen- Chang Wang
指導教授:林清安 教授 Advisor: Prof. Ching-An Lin
國立交通大學電控工程研究所
碩士論文
A Thesis
Submitted to Institute of Electrical Control Engineering
College of Electrical Engineering and Computer Science
National Chiao Tung University
in Partial Fulfillment of the Requirements
for the Degree of Master
in
Electrical and Control Engineering
October 2014
Hsinchu, Taiwan, Republic of China
i
飛彈尾翼和側向推力複合控制系統設計
Blended Control System Design for Missile with Tail and
Lateral Thrust
研究生:汪言璋 指導教授:林清安 教授 國立交通大學電控工程研究所摘 要
本論文的主要目的在探討攔截飛彈以尾翼及側向推力為致動器的複合控制 設計。尾翼控制利用氣動力造成攻角改變而產生橫向加速度。利用比例積分器配 合角速度回授設計尾翼控制器,達到穩態及暫態性能要求。由於尾翼角度以及非 最小相位動態的限制,尾翼控制的暫態響應可能無法滿足攔截的需求。因此防禦 飛彈,如愛國者三型,常增加側向推力的致動器,在終端導引的最後階段啟動, 以改善控制系統的反應速度,提升攔截能力。複合控制器設計概念為以尾翼控制 為主要控制,側向推力為快速提升系統攻角的輔助控制。本論文提出兩種複合控 制設計:一是將線性的純尾翼控制輸入視為一個匹配式干擾,利用順滑模控制對 雜訊的穩健性直接設計側向推力控制。二是將側向推力視為一個單輸入控制,利 用順滑模控制來設計包含純尾翼控制的飛彈模型。在導引的模擬之下顯示了複合 控制的攔截能力,增加側向推力致動器確實能提升系統響應速度。ii
Blended Control System Design for Missile with Tail and
Lateral Thrust
Student: Yen-Chang Wang Advisor: Prof. Ching-An Lin
Institute of Electrical Control Engineering
National Chiao Tung University
ABSTRACT
This thesis investigates the control about blended control for missile actuator with tail and lateral thrust. Tail controller changes angle of attack to generate lateral force by aerodynamic. To achieve requirements of steady-state and transient
performance, tail controller is designed with proportional-integral controller with
angular velocity feedback. Because of limits for degree of the tail as well as non -minimum phase dynamics, transient response of tail control may not meet the needs of interception. So anti-tactical missile, such as the Patriot III , often combining the lateral thrust actuators in the final stages of terminal guidance to improve the ability to intercept . Concept of blended control design is considering tail control as the main controller, and lateral thrust as auxiliary controller to increase angle of attack rapidly. In this thesis,we propose two blended control designs. First is considering the input of linear tail control as match disturbance, and be designed with sliding mode control for lateral thrust controller. Second is considering the lateral thrust as a single-input control, and be designed with sliding mode control for missile model that contains tail-only controller. Simulations of guidance show the capabilities of interception for blended control. Obviously, combing lateral thrust actuators can improve system response.
iii
誌謝
首先感謝指導教授 林清安博士兩年來的教導,在我的學習過程
中給予協助與鼓勵。除了學業上的知識,也讓我習得做研究及做事該
有的態度與方法,使我受益良多。這兩年來的教誨讓我在未來的生涯
中得以運用。
再來感謝實驗室同窗的同學以及學弟的陪伴與鼓勵,在互相的討
論中彼此的成長。也在論文研究上提供意見,讓我的研究可以順利進
行。感謝實驗室已畢業的學長們,提供經驗及意見。感謝碩一時室友
們的陪伴及鼓勵,也提供了學術上的意見。感謝女友亮均的陪伴,在
我遇到困難時給予鼓勵。
最後感謝家人的支持與關懷,尤其是父母在我的求學階段上毫
無保留的付出,給予我精神上的鼓勵。
汪言璋 于新竹交大
103 年 10 月
iv
目錄
中文摘要... i 英文摘要...ii 誌謝... iii 目錄... iv 圖目錄... vi 表目錄...ivx 第一章、 緒論...1 第二章、 基礎理論與數學模型之建立...3 2.1 順滑模控制...3 2.1.1 順滑模態的原理...3 2.1.2 順滑模態的設計...5 2.2 飛彈模型建立...8 2.2.1 座標系統定義...8 2.2.2 飛彈簡易模型...10 2.2.3 運動方程式...11 2.2.4 飛彈模型方塊圖...13 2.2.5 氣動力係數、氣動力矩係數...14 第三章、 攔截飛彈的純尾翼控制設計...16 3.1 攔截飛彈的動態方程式...16 3.2 角速度回授及比例積分控制器的設計...18 第四章、 攔截飛彈的複合控制設計...29 4.1 設計一複合控制...29 4.1.1 推導攔截飛彈動態方程式...29 4.1.2 線性化動態方程式的修正...32 4.1.3 設計順滑模控制器...34v 4.1.4 修正型的切跳函數...36 4.1.5 設計一複合控制設計...37 4.1.6 側向推力穩態過大的改善...41 4.2 設計二複合控制...44 4.2.1 推導攔截飛彈動態方程式...45 4.2.2 順滑模控制器的設計...46 4.2.3 側向推力穩態過大的改善...51 4.3 降低側向推力的響應分析...53 第五章、 追蹤導引模擬與討論...56 5.1 追蹤導引法則...56 5.1.1 PN 導引法則...56 5.1.2 APN 導引法則...57 5.1.3 停止的根據和誤差距離...58 5.1.4 模擬條件...58 5.1.5 攔截模擬的數值結果...59 5.2 導入導引法則的模擬結果與討論...60 5.2.1 目標飛彈狀態的不同對純尾翼控制的影響...61 5.2.2 純尾翼控制 APN 與 PN 的成效比較...64 5.2.3 純尾翼控制與複合控制的比較...65 5.2.4 降低側向推力的導引分析...72 5.2.5 氣動力係數誤差所造成的影響...73 5.2.6 裝載燃料的重量計算...74 5.3 側向推力打開的時機...75 第六章、 結論...77 參考文獻...78
vi
圖目錄
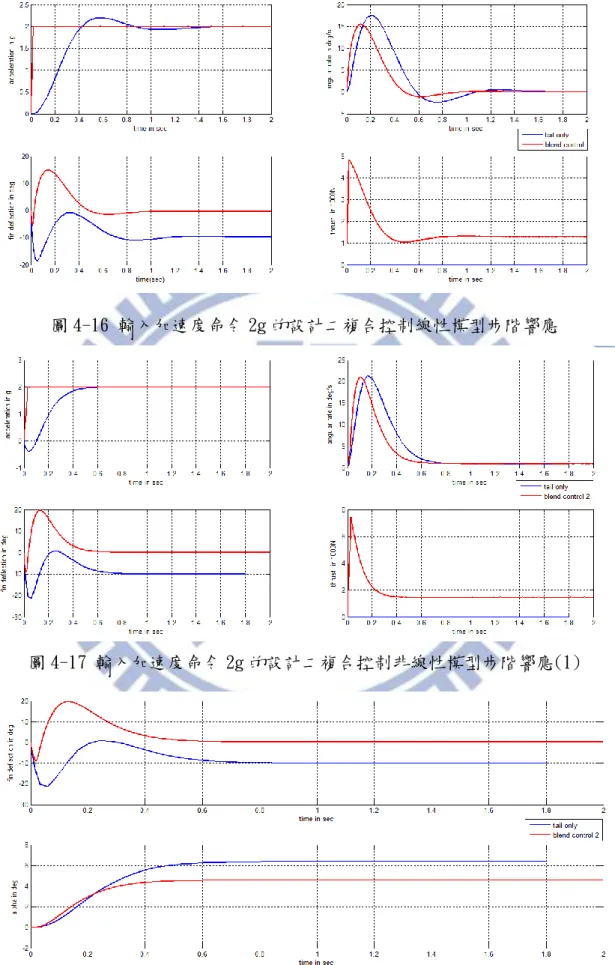
圖 1-1 複合控制設計...2 圖 2-1 二次系統的順滑模態行為...4 圖 2-2 地面座標與體座標示意圖...9 圖 2-3 攔截飛彈與目標相對位置及速度示意圖...10 圖 2-4 飛彈二維平面示意圖...11 圖 2-5 飛彈動態模式及導引控制系統方塊圖...14 圖 3-1 尾翼輸入2度步階命令所得到的加速度ay(t)比較圖,藍線為模擬輸出結果, 紅線為(3.1)式的圖形...17 圖 3-2 尾翼輸入2度步階命令所得到的角速度q(t)比較圖,藍線為模擬輸出結果, 紅線為(3.2)式的圖形...17 圖 3-3 (3.6)式及(3.7)式的方塊圖...18 圖 3-4 加入 q 回授的狀態方程式...19 圖 3-5 利用比例積分控制器設計(3.10)式系統,其中Kq = 1...19 圖 3-6 零點在-1 的根軌跡圖(Ka < 0) ...21 圖 3-7 線性模型零點在-1 時不同Ka、Ki的加速度響應比較...22 圖 3-8 線性模型零點在-1 時不同Ka、Ki的尾翼角響應圖比較...22 圖 3-9 零點在-2 的根軌跡圖(Ka < 0) ...23 圖 3-10 線性模型零點在-2 時不同Ka、Ki的加速度響應比較...23 圖 3-11 線性模型零點在-2 時不同Ka、Ki的尾翼角響應圖比較...24 圖 3-12 線性模型零點在-3 時不同Ka、Ki的加速度響應比較...24 圖 3-13 線性模型零點在-3 時不同Ka、Ki的尾翼角響應圖比較...25 圖 3-14 非線性模型零點在-1 時不同Ka、Ki的加速度響應比較...26 圖 3-15 非線性模型零點在-1 時不同Ka、Ki的尾翼角響應圖比較...26 圖 3-16 非線性模型零點在-2 時不同Ka、Ki的加速度響應比較...27vii 圖 3-17 非線性模型零點在-2 時不同Ka、Ki的尾翼角響應圖比較...27 圖 3-18 非線性模型零點在-3 時不同Ka、Ki的加速度響應比較...28 圖 3-19 非線性模型零點在-3 時不同Ka、Ki的尾翼角響應圖比較...28 圖 4-1 輸入 40 度步階函數尾翼角加速度以及攻角響應圖...32 圖 4-2 輸入 8000N 步階函數的側向推力加速度以及攻角響應圖...32 圖 4-3 修正型的切跳函數不同ρ值得比較...36 圖 4-4 修正型與一般切跳函數比較...37 圖 4-5 不同比例尾翼及側向推力的響應圖...39 圖 4-6 輸入加速度命令 2g 的複合控制線性模型步階響應...39 圖 4-7 輸入加速度命令 2g 的複合控制非線性步階響應(1)...40 圖 4-8 輸入加速度命令 2g 的複合控制非線性步階響應(2)...40 圖 4-9 改善後的複合控制 2g 步階響應比較(1)...42 圖 4-10 改善後的複合控制 2g 步階響應比較(2)...42 圖 4-11 加速度命令不同的步階函數複合控制改善前後的比較(1)...43 圖 4-12 加速度命令不同的步階函數複合控制改善前後的比較(2)...43 圖 4-13 設計一複合控制的修正設計...44 圖 4-14 尾翼命令及尾翼輸入開迴路系統比較...48 圖 4-15 側向推力命令及側向推力輸入開迴路系統比較...48 圖 4-16 輸入加速度命令 2g 的設計二複合控制線性模型步階響應...50 圖 4-17 輸入加速度命令 2g 的設計二複合控制非線性模型步階響應(1) ...50 圖 4-18 輸入加速度命令 2g 的設計二複合控制非線性模型步階響應(2)...50 圖 4-19 不同步階函數的加速度命令設計二複合控制改善前後的比較(1)....51 圖 4-20 不同步階函數的加速度命令設計二複合控制改善前後的比較(2)....52 圖 4-21 設計二複合控制的修正設計...52 圖 4-22 設計一調慢加速度響應的模擬結果...53
viii 圖 4-23 設計二調慢加速度響應的模擬結果...54 圖 4-24 設計一使用(4.60)式參數的模擬結果...55 圖 4-25 設計二使用(4.61)式參數的模擬結果...55 圖 5-1 目標未加速時的尾翼追蹤響應(1)...59 圖 5-2 目標未加速時的尾翼追蹤響應(2)...60 圖 5-3 目標未加速時的尾翼追蹤響應(3)...60 圖 5-4 不同振幅以及頻率對於尾翼追蹤的成效比較圖...61 圖 5-5 為不同目標飛彈加速度頻率對攔截飛彈追蹤的影響...62 圖 5-6 不同的初始航向誤差對於尾翼追蹤的成效比較圖...63 圖 5-7 較大的初始航向誤差對於尾翼追蹤的成效比較圖...63 圖 5-8 不同的頻率在 13 度的初始航向誤差對尾翼追蹤的成效比較圖...64 圖 5-9 不同振幅的加速度對追蹤難易度的影響...64 圖 5-10 純尾翼控制與設計一複合控制的比較(1)...66 圖 5-11 純尾翼控制與設計一複合控制的比較(2)...66 圖 5-12 純尾翼控制與設計一複合控制的比較(3)...67 圖 5-13 設計一複合控制改善前後的比較(1)...68 圖 5-14 設計一複合控制改善前後的比較(2)...68 圖 5-15 純尾翼控制與設計二複合控制的比較(1)...69 圖 5-16 純尾翼控制與設計二複合控制的比較(2)...70 圖 5-17 純尾翼控制與設計二複合控制的比較(3)...70 圖 5-18 設計二複合控制改善前後的比較(1)...71 圖 5-19 設計二複合控制改善前後的比較(2)...71 圖 5-20 設計一降低側向推力的導引...72 圖 5-21 設計二降低側向推力的導引...73 圖 5-22 複合控制穩態改善設計氣動力誤差對追蹤難度的影響...74
ix
表目錄
表 2-1 攔截飛彈之參數設定...15 表 3-1 線性模型零點在-1 時不同Ka、Ki的加速度暫態響應比較...21 表 3-2 線性模型零點在-2 時不同Ka、Ki的加速度暫態響應比較...23 表 3-4 非線性模型零點在-1 時不同Ka、Ki的加速度暫態響應比較...25 表 3-5 非線性模型零點在-2 時不同Ka、Ki的加速度暫態響應比較...26 表 3-6 非線性模型零點在-3 時不同Ka、Ki的加速度暫態響應比較...27 表 4-1 不同比例尾翼及側向推力的上升時間比較...38 表 4-2 補足尾翼角與加速度命令關係...41 表 4-3 設計二複合控制需補足尾翼角與加速度命令關係...51 表 5-1 追蹤過程消耗能量以及燃料...74 表 5-2 設計一複合控制改善設計側向推力在不同時間打開的情形...75 表 5-3 設計二複合控制改善設計側向推力在不同時間打開的情形...761
第一章
緒論
作戰用的彈道導彈(tactical ballistic missle,TBM)在返回大氣層時會有很劇烈 螺旋飛行的狀態。在高度下降 10 萬英呎和 6 萬英呎間,會有 1~10g 的加速度大 小。螺旋飛行的頻率大約是 0.5hz,難以去追蹤掌握。防禦攔截飛彈(anti-tactical ballistic missile, ATBM)想要打到目標導彈,必須擁有快速的響應特性。傳統的攔 截飛彈是控制尾翼(tail fin)的角度變化來產生空氣動力以及空氣動力對質心的動 量。在比較高的高度時,動態壓力(dynamic pressures)會比較小,導致空氣動力以 及動量都會比較小。如此一來想要快速的改變追蹤命令,如改變加速度,響應的 結果就會比較差。而最常用的解決方法就是在飛彈質心前方加入側向的推力(side jet),讓噴嘴產生一個側邊的推力(lateral-thrust),能快速的改變飛彈的攻角(attack angle)或飛彈的姿態(attitude),進而能改善其響應。 防禦攔截飛彈(ATBM)融合尾翼控制(tail control)和側向推力(lateral-thrust), 這個複合控制可以提升響應,增加負載性,因此攔截飛彈擁有較高的加速度以及 可操作性。這些特性能使攔截飛彈打到目標物的機率提高,因此複合控制也成為 熱門研究的主題。一般來說攔截飛彈在打到目標物之前是控制尾翼角來達到控制 加速度或是其他的控制目的,等到接近目標物時便開啟側向推力,使響應加速進 而容易打中目標物。文獻[1]中說明了增加側向推力的好處,也比較了有無增加 側向推力的響應。此外文中也說明了側向推力放在何處的位置最理想。 現階段設計複合控制器的方法有許多: [2]提出一個適應性控制系統的技術 來設計;[3]提出一個μ- Synthesis 控制器的方法;[4]利用順滑模控制器來設計; [5] 提出預測性的技術和解決干擾、不定量的方法。然而以上的控制器皆是利用 相同的控制方法同時設計純尾翼控制以及側向推力控制。本論文嘗試利用線性結 合非線性的複合控制方法來作設計。如圖 1-1 所示,利用線性方法設計尾翼作為 主要控制,利用非線性的順滑模控制設計側向推力作為輔助控制,並用一個開關
2 來決定是否開啟。我們將純尾翼控制視為獨立的主體控制,開關打開時純尾翼控 制仍對系統保有絕大部分的貢獻度,側向推力只是讓攻角提升的速度加快。 圖 1-1 複合控制設計 本論文的研究方向為設計純尾翼控制器以及加入側向推力的複合控制器。在 純尾翼控制時能使系統穩定,且在限制尾翼角(tail angle)的大小之下,能夠達到 所需加速度,保有一定的追蹤成效利用。加入側向推力後使得攻角能夠快速提升, 系統的響應加速,能使系統更快達到所需加速度。本論文選取順滑模控制器來設 計側向推力控制器,原因是順滑模控制器的響應很快,能夠幫助系統更容易打到 目標物。此外順滑模控制的穩健性非常好,側向推力打開時會產生不定量 (uncertainty)的干擾,系統參數會有誤差,順滑模控制能忍受較大的誤差。 本論文是針對文獻[1]所給予的飛彈模型以及參數來做設計。文獻[1]中的模 型為簡化系統,將攻角視為姿態角,為一個線性的系統。本論文則將之擴展,導 入飛彈的非線性模型,使用文獻[1]的氣動力係數以及飛彈的物理參數。文獻[6] 提出了利用順滑模控制同時控制尾翼角和側向推力,但此方法在本論文的飛彈模 型中不適用。此模型利用順滑模控制尾翼角的力道非常大,在尾翼角有限制下造 成系統的不穩定。因此我們所設計的複合控制可以解決此問題。 本論文章節配置如下:第一章為緒論;第二章介紹順滑模控制的理論和設計 方法,以及飛彈的座標定義和模型建立;第三章介紹純尾翼控制的線性設計;第 四章介紹兩種複合控制設計,利用順滑模控制設計側向推力控制並結合純尾翼控 制,且針對側向推力過大的問題進行修正;第五章為模擬與討論,導入導引法則 的追蹤,比較加入側向推力的好處;第六章則是結論。
3
第二章
基礎理論與數學模型之建立
本章介紹順滑模控制的設計方法和攔截飛彈及目標二維運動的方程式。順 滑模的介紹主要參考[7],飛彈動態模式中的氣動力資料則採文獻[1]的數據。2.1 節介紹順滑模的理論和設計的方法,2.2 節介紹攔截飛彈的模型建立即攔截模擬 的整體方塊圖。
2.1 順滑模控制
順滑模控制是一種特殊的非線性控制,利用設計出的順滑函數(sliding function)s(x)來決定不連續控制的輸入,使受控系統在兩個不同子結構中不停切 換,迫使其進入順滑模態(sliding mode),此時系統只能沿著順滑面(sliding surface) 運動,並往控制目標位置移動。 2.1.1 順滑模態的原理[7] 順滑模態(sliding mode)是一種產生在超空間(hyperspace)的一種系統行為,且 超空間會比原系統減少一個自由度(degree-of-freedom)。一個系統要擁有順滑模 態必須具備兩個條件: A.必須存在一個超空間且所有軌跡在有限的時間內都會接觸到此超空間,稱為迫 近條件(approaching condition)或接近條件(reaching condition)。B.系統軌跡進入超空間後必須順著此超空間滑向原點,稱為順滑條件(sliding condition)。
以二次系統為例,順滑模態將發生在一維的空間中。圖 2-1 所示系統軌跡在 有限時間接觸到超空間(s=0),且進入超空間後順著滑向原點。
4 圖 2-1 二次系統的順滑模態行為 設計順滑模系統時,所處理的數學模式是以狀態變數方程式為對象,考慮如 下系統: ẋ = f(x, u(x)) (2.1) 其中x ∈ Rn,u(x)為控制輸入(加入的切換條件)。切換時機由狀態變數x決定, 切換條件: u(x) = {u+(x) s(x) > 0 u−(x) s(x) < 0 (2.2)
s(x)為一個切換函數(switching function),又稱為順滑函數(sliding function)。 s(x)必須對時間為一次可微且u+(x) ≠ u−(x)。利用此切換函數可以將整個狀態空 間分成s(x) > 0、s(x) < 0、s(x) = 0三個區間,超空間s(x) = 0又被稱為順滑面 (sliding surface)必須包含平衡點x = 0,系統設計目標為在s(x) = 0的順滑面上產 生順滑模態。由圖 2-1 所示,x(t0)在有限的時間t1內到達s(x) = 0,此階段為迫 近模態。然後在往後的t > 𝑡1時段,系統在順滑面附近限制的範圍內切跳,而且 朝平衡點移動,最後達到x(∞) → 0。此階段為順滑模態。 為了產生順滑模態和迫近模態,必須滿足順滑條件和迫近條件。順滑模態使 系統不脫離順滑面,軌跡必須有以下之行為:當s(x) > 0時,s(x)的值必須隨時間 遞減,即ṡ(x) < 0; 當 s(x) < 0時,s(x)的值必須隨時間遞增,即ṡ(x) > 0。以順
5 滑條件以數學式來表示則為 lims→0sṡ < 0 (2.3) 再來討論迫近條件,使系統在有限時間接觸到順滑面,其數學式如下: sṡ < −σ|s| 且 σ > 0 (2.4) 這裡利用里亞普諾夫(Lyapunov)原理來證明: 首先選取里亞普諾夫函數 L = s2 (2.5) 由於順滑函數s對時間t是一次可微,因此 L̇ = 2 sṡ (2.6) 代入迫近條件(2.4)式 L̇ =dLdt < −2𝜎|s| = −2σ√L < 0 (2.7) L̇ < 0顯示L為遞減函數。由於√L > 0和dt > 0,整理(2.7)式可得: dL √L< −2σdt (2.8) 亦可得 ∫L(0)L(t)dL√L= 2√L |L(0) = 2√L(t) − 2L(t) √L(0) < −2σt (2.9) 故 0 ≤ √L(t) < √L(0) – σt (2.10) 也就是說當t =√L(0)σ 時 0 ≤ √L(t) < 0 (2.11) 亦即L(t)在有限時間t =√L(0)σ 之內收斂至0,接觸到順滑面s(x) = 0。且迫近條件 (2.4)式也符合順滑條件(2.3)式,因此(2.4)式也稱為順滑迫近條件。 2.1.2 順滑模態的設計[7] 順滑模態的設計分成兩個步驟:(1)選定順滑函數s(x),使得系統軌跡在順滑
6 模態時能滑向控制目標點。(2)決定控制法則u,使得系統軌跡在有限的時間內接 觸到順滑面,產生順滑模態。以單輸入系統為範例,如果數學模式為 ẋ1 = x2 ẋ2 = x3 ⋮ ẋn−1= xn ẋn= a1x1+ a2x2+⋯+anxn+ u + d(x, t) (2.12) 其中x = [x1 x2… xn]T是系統狀態,u為控制輸入,d(x, t)為系統所遭受干擾,且 干擾大小都有上限,表為 |d(x, t)| ≤ δ(x, t) (2.13) 其中δ(x, t)為一已知的上限函數。以下說明設計順滑模態的兩個步驟: (1)步驟一:選擇順滑函數 一般情形下順滑函數設定為 s(x) = cx = c1x1+ c2x2+ ⋯ + cn−1xn−1+ xn (2.14) 其中c = [c1 c2… cn−1 1]為一個常數向量。在順滑模態s(x) = 0的假設下,系統軌 跡必須符合 ṡ(x) = c1ẋ1+ c2ẋ2 + ⋯ + cn−1ẋn−1+ ẋn = 0 (2.15) 利用(2.12)式可得 ṡ(x) = a1x1 + (a2+ c1)x2+⋯+(an+ cn−1)xn+ u + d(x, t) = 0 (2.16) 由(2.16)式可以解得 u = −a1x1− (a2+ c1)x2− ⋯ − (an+ cn−1)xn− d(x, t) (2.17) 將u代回(2.12)式可得 ẋ1 = x2 ẋ2 = x3 ⋮ ẋn−1 = xn (2.18)
7 利用(2.14)式s(x) = 0的關係式可將(2.18)式改為 ẋ1 = x2 ẋ2 = x3 ⋮ ẋn−1 = xn=−c1x1− c2x2 − ⋯ − cn−1xn−1 (2.19) (2.19)式的次數降為n − 1次,可得知順滑模態比原系統少一級次,雜訊d(x, t)也 未出現在(2.19)式中,顯示系統軌跡在順滑模態不受雜訊影響。 為達控制目標必須選取適當的係數ci,i = 1,2 … n − 1。先令x1 = z,則可得 xk= z(k−1),k = 2, … n − 1,為z對t的k − 1次的微分。(2.19)式的最後一個等式 可表示為 z(n−1)+ c n−1z(n−2)+ ⋯ + c2ż + c1z = 0 (2.20) 其特徵方程式為 λn−1+ c n−1λ(n−2)+ ⋯ + c2λ̇ + c1λ = 0 (2.21) 所以選取之係數必須使特徵方程式的根皆有負的實部,保證系統的穩定性。 且當t → ∞,xk(t) → 0,k = 1,2, … n − 1。由(2.19)可得xn(t) → 0。因此系統在順 滑模態時為漸近穩定。 (2)步驟二:選取控制定律 控制定律的設計必須符合迫近順滑條件(2.4)式,來保證系統在有限時間內進入順 滑模態,並且滑向控制目標。由(2.16)式順滑函數的一次微分式可得 ṡ(x) = a1x1 + (a2+ c1)x2+⋯+(an+ cn−1)xn+ u + d(x, t) (2.22) 為了符合順滑迫近條件 sṡ < −σ|s| 可令控制定律如下: u = −a1x1− (a2+ c1)x2− ⋯ − (an+ cn−1)xn− (δ(x, t) + σ)sign(s) (2.23) 其中δ(x, t)符合(2.13)式且sign(s)定義為 sign(s) = { 0 s = 01 s > 0 −1 s < 0 (2.24)
8 將(2.23)式代回(2.22)式為 ṡ = −(δ(x, t) + σ)sign(s) + d(x, t) (2.25) 兩邊同乘s整理為 sṡ = −σ|s| − δ(x, t)|s| + d(x, t)s = −σ|s| − δ(x, t)|s| (1 −δ(x,t)|s|d(x,t)s) ≤ −σ|s | (2.26) 顯然控制法則(2.23)式可以保證迫近順滑條件的成立。 但是使用切換函數sign(s)系統軌跡會在順滑面s = 0的兩邊不斷跳動,造成 許多不當的高頻雜訊。因此將切跳函數修正為 sat(s, ε) = { 1 s > 𝜀 s ε |s| ≤ ε −1 s < −𝜀 (2.27) 在順滑層 |s| ≤ ε中,ε為一個極小之值, s可以視為一個有限量的值,因此 不影響前面控制定律和順滑函數的設計。但系統軌跡無法逼近原點,只是在附近 遊動,降低了控制的精準度。不過這個代價是值得的,適當的設計順滑層就不會 激發出高頻的雜訊或產生不當的切跳現象。
2.2 飛彈模型建立
飛彈在空間中的運動可分為平移運動(translational motion)與轉動運(rotational motion),各為三個自由度的運動,因此整個三維空間中飛彈為六個自由度的運 動[8]。本論文只考慮二維空間三個自由度的運動,以下介紹二維座標系以及運 動方程式。 2.2.1 座標系統定義 地面座標𝐒𝐍 地面座標SN原點為攔截飛彈的發射點。由圖 2-2 所示,XN軸表示飛彈在地 面的距離,YN表示飛彈的高度。使用SN座標系作為慣性座標,方便描述攔截飛
9 彈與目標在空間中的飛行軌跡。 體座標𝐒𝐁(Body Coordinate) 體座標隨著飛彈的姿態角變化,可由地面座標轉換而得。原點為飛彈質心, XB為飛彈長軸方向,YB為XB方向逆時針 90 度的方向。圖 2-2 為地面座標與體座 標示意圖。 圖 2-2 地面座標與體座標示意圖 圖 2-3 為攔截飛彈與目標相對位置及速度示意圖。v為攔截飛彈的速度向量, vt為目標飛彈的速度向量。λ為瞄準線與地面座標XN軸的夾角,稱為視線角,η為 攔截飛彈速度與瞄準線的夾角,ηt為目標飛彈速度與瞄準線的夾角。假設攔截飛 彈與目標飛彈都以固定速度飛行,皆沒有任何方向的加速度,攔截飛彈速度與瞄 準線的夾角維持η0來飛行,則攔截飛彈不需任何加速度即可攔截目標。因此定義 初始航向誤差(heading error)為 he = η − η0 (2.28)
10 其中η為攔截飛彈進入歸向(homing)的初始角度。假設攔截飛彈速度為v0,目標 飛彈速度為vt0,目標飛彈速度與瞄準線的夾角為ηt0,η0可以表示為
η
0= sin
−1(
vt0 sinηt0 v0)
(2.29) 初始航向誤差及η0方便攔截模擬時設定攔截飛彈和目標的相對位置、相對速度以 及導引的需求。 圖 2-3 攔截飛彈與目標相對位置及速度示意圖 2.2.2 飛彈簡易模型 在本論文中只考慮飛彈平面二維的運動,探討飛彈在地面座標系XN軸以及 YN軸平面的運動情形。圖 2-4 中δ為飛彈尾翼角(tail angle),逆時針為正。T 為距 離質心(CG)b 公尺的側向推力,θ為飛彈姿態角(attitude angle),α為攻角 (angle of attack),γ為飛行路徑角,v 為飛彈速度。定義姿態角θ為從XN到XB的夾角,逆時11 為 γ = tan−1(vNy vNx) (2.30) 其中vNy為飛彈速度在地面座標YN方向的分量,vNx為飛彈速度在地面座標XN方 向的分量。定義攻角α為飛彈速度 v 到XB軸的夾角,逆時針為正,可表示為 α = θ − γ (2.31) 圖 2-4 飛彈二維平面示意圖 2.2.3 運動方程式 平移運動方程式 現在考慮平面二維座標如圖 2-4 所示,平移運動為飛彈質心在地面座標(SN) 的位置變化、速度變化、加速度變化。速度與加速度關係如下: v̇Nx = aNx v̇Ny = aNy (2.32)
12 其中vNy為飛彈速度在地面座標YN方向的分量,vNx為飛彈速度在地面座標XN方 向的分量。aNy為飛彈加速度在地面座標YN方向的分量,aNx為飛彈加速度在地面 座標XN方向的分量。位置與速度的關係如下: ẋN= vNx ẏN= vNy (2.33) 其中xN為飛彈在地面座標XN方向的位置,yN為飛彈在地面座標YN方向的位置。 此外飛彈在體座標YB方向所受的力F可以表示為 F = Yα α + Yδδ + T (2.34) 其中Yα 為攻角的氣動力係數,Yδ為尾翼角的氣動力係數,T 為側向推力,α為攻 角,δ為尾翼角。因此飛彈在體座標YB方向的加速度ay可以表示為 ay
=
Yα α+Ymδδ+T(2.35)
其中 m 為飛彈質量。加速度在體座標SB的分量及地面座標SN的分量可以表示為 [aaNx
Ny] = [cosθ −sinθsinθ cosθ ] [
ax ay] (2.36) 其中ax為加速度在體座標XB方向的加速度分量,為簡化分析設ax = 0。由(2.32) 及(2.33)將aNx及aNy積分可以得到飛彈在地面座標的速度及位置。 旋轉運動方程式 考慮飛彈在二維平面上的旋轉,由圖 2-4 所示,體座標為地面座標逆時針旋 轉θ度。飛彈所受的力矩M可以表示為 M = Mαα + Mδδ + bT (2.37) 其中Mα為攻角的氣動力矩係數,Mδ為尾翼角的氣動力矩係數,b為質心與側向 推力噴嘴的距離。力矩所造成的角加速度aθ為 aθ =Mαα+MIδδ+bT (2.38) 其中I為轉動慣量。角加速度aθ積分可得角速度q,角速度積分可得姿態角θ,因
13 此轉動方程式可以表示為 q̇ =Mαα+MIδδ+bT ,θ̇ = q
(2.39)
目標運動方程式 假設目標為點質量,不考慮姿態,只考慮目標在二維空間的平移運動,其加 速度與速度關係為 v̇tx = atx v̇ty = aty (2.39) 其中vty為目標飛彈速度在地面座標YN方向的分量,vtx為目標飛彈速度在地面座
標XN方向的分量。aty為飛彈加速度在地面座標YN方向的分量,atx為飛彈加速度 在地面座標XN方向的分量。位置與速度的關係為 ẋt= vtx ẏt = vty (2.40) 其中xt為目標飛彈在地面座標XN方向的位置,yt為目標飛彈在地面座標YN方向的 位置。 2.2.4 飛彈模型方塊圖 圖 2-5 為我們進行模擬的飛彈動態模式及導引控制系統方塊圖。體座標YB方 向加速度ay和角速度q回授進入控制器,產生尾翼角命令δc以及側向推力命令Tc, 再經過致動器產生尾翼角δ和側向推力T進入飛彈的氣動力方程式。致動器為一 階的動態方程式,其中τδ 、τT分別為尾翼角和側向推力的時間常數。氣動力方 程式產生體座標YB方向加速度與角加速度,角加速度經過積分後形成角速度,角 速度積分後成為姿態角。YB方向加速度及角速度回授給控制器,姿態角供YB方向 加速度進行座標轉換,經由計算可以得到飛彈在地面座標的位置、速度、加速度。 最後經由追蹤導引法則可以得到體座標YB方向加速度的命令,最後與回授的加速 度和角速度進入控制器進行運算。此外利用(2.30)式、(2.31)式計算攻角,必須有
14 地面座標的資訊以及姿態角,得到的攻角提供給氣動力方程式作運算。 圖 2-5 飛彈動態模式及導引控制系統方塊圖 2.2.5 氣動力係數、氣動力矩係數 飛行載具的機身與尾翼在飛行時會產生氣動力、氣動力矩。而這些氣動力係 數、氣動力矩係數根據飛行高度、馬赫數、攻角、風向角等因素而不同,必須由 飛行測試推估而得。本論文使用文獻[1]的資料,其相關係數如表 2-1。
15 表 2-1 攔截飛彈之參數設定 物理性質 飛彈質量 m=365kg 角動慣量 I=746kg-m2 參考長度 d=0.33m 參考面積 s=π4d2=0.0855m2 飛彈飛行狀態 速度 v=4000ft/s=1219m/s 高度 H=80000ft=24384m 動態壓力 q=12ρv2= 0.5(0.0448)(1219.2)2=33296N/m2 空氣動力性質 尾翼力矩參數 CMδ= -8 攻角力矩參數 CMα= -12.5 尾翼動力參數 CYδ=1.5 攻角動力參數 CYα=25 氣動力係數(Y 方向) 尾翼氣動力係數 Yδ= CYδqs=4270N/rad 攻角氣動力係數 Yα = CYαqs=71170N/rad 氣動力矩係數(逆時針) 尾翼角氣動力矩係數 Mδ = Cδqsd= -7515N-m/rad 攻角氣動力矩係數 Mα = Cαqsd= -11743 N-m/rad
16
第三章
攔截飛彈的純尾翼控制設計
本章討論以飛彈尾翼為致動器的線性控制系統設計。尾翼控制利用氣動力造 成攻角改變而產生橫向加速度。控制系統根據線性化的模式設計來達到穩態及暫 態的性能要求。由於尾翼角度以及非最小相位動態的限制,尾翼控制的暫態響應 可能無法滿足攔截的需求。因此防禦飛彈,如愛國者三型,常增加側向推力的致 動器,在終端導引的最後階段啟動,以改善控制系統的反應速度,提升攔截能力。 尾翼及側向推力為致動器的非線性混合控制系統設計將於第四章討論。由於燃料 重量及體積的限制,側向推力只有短暫的作用時間,攔截飛彈在大部分的飛行時 間仍仰賴尾翼來達到控制的目的。本章介紹簡單的尾翼控制系統設計,3.1 節討 論利用簡單的模擬來建立飛彈簡化的線性動態模式,3.2 節討論比例積分器配合 角速度回授的線性控制系統設計。 3.1 攔截飛彈的動態方程式 第二章介紹二維的非線性飛彈動態,其中非線性來自座標轉換及攻角與速度 的非線性關係。考慮側向推力不作用,因此尾翼角的命令δc為動態系統的輸入。 為了控制設計的目的,考慮可量測的角速度q和橫向(體座標YB方向)加速度ay為 輸出。為了得到δc至ay及q之間的轉移函數,利用δc為一步階函數作為輸入,取 得輸出ay及q的訊號。由於ay及q均可近似為弦波加常數的波型,利用拉普拉斯轉 換可以得到簡化的轉移函數,進而得到系統狀態方程式。 以尾翼角命令δc = π/90rad (2 度)步階函數輸入開迴路系統,我們得到類弦 波的圖形ay(t)及q(t),方程式近似為 ay(t) = −4 + 4cos3.9t (m/s2) (3.1) q(t) = −0.005 − 0.073sin3.9t (rad/s ) (3.2) 圖 3-1 和圖 3-2 分別為加速度以及角速度實際模擬以及近似方程式的比較圖,藍17 色線為實際模擬結果,紅色線為近似方程式的結果。從這兩張比較圖中可以看出 實際的曲線與近似方程式的相似性。 圖 3-1 尾翼輸入 2 度步階命令所得到的加速度ay(t)比較圖,藍線為模擬輸出結 果,紅線為(3.1)式的圖形。 圖 3-2 尾翼輸入 2 度步階命令所得到的角速度q(t)比較圖,藍線為模擬輸出結果, 紅線為(3.2)式的圖形。 統整以上方程式,以時域系統表示: δc(t) = 2(180π ) (rad) ay(t) = −4 + 4cos3.9t (m/s2) q(t) = −0.005 − 0.073sin3.9t (rad/s) 經由拉普拉斯轉換,以頻域表示: δc(s) = 2(180sπ ) (rad) ay(s) = −41s+ 4s2+15.2s (m /s2) q(s) = −0.0051s− 0.073s2+15.23.9 (rad /s)
18 可以得到轉移函數
ay(s) δc(s)
= −
1743 s2+15.2 (3.3) q(s) δc(s)= −0.14 −
8.1s s2+15.2(3.4) 為了計算方便將(3.4)式中常數項-0.14 忽略,則兩個簡化的轉移函數為 ay(s) δc(s)
= −
1743 s2+15.2 , q(s) δc(s)= −
8.1s s2+15.2 (3.5) 從(3.5)式的轉移函數可以得到一個以 δc為輸入,[ay q]T為輸出的狀態方程式 [η̇η̈] = [ 0 1 −15.2 0] [ η η̇] + [01] δc (3.6) [aq ] = [y −1743 0 0 −8.1] [ η η̇] (3.7) 其中狀態變數為[η η̇]T。狀態方程式(3.6)式及(3.7)式可以圖 3-3 的方塊圖表示。 圖 3-3 (3.6)式及(3.7)式的方塊圖 3.2 角速度回授及比例積分控制器的設計 由(3.5)式轉移函數可知系統有一對虛軸上的極點±3.9j,因此步階響應為持 續的震盪。為了簡化設計考慮角速度回授來將極點移入左半平面,以增加系統的 阻尼比。角速度回授的方塊圖如圖 3-4 所示。經過角速度回授,尾翼指令δc可以 表示為 δc = u + (−8.1Kq)η̇ (3.8)19 其中u為新的控制輸入。將(3.8)式代入(3.6)式可得新的狀態方程式為 [η̇η̈] = [−15.2 −8.1K0 1 q] [ η η̇] + [01] u [ay] = [−1743 0] [ηη̇] (3.9) 經過計算得到u 到ay的轉移函數為 ay(s) u(s)
=
−1743 s2+8.1Kqs+15.2(3.10) 圖 3-4 加入 q 回授的狀態方程式 由(3.10)式可知自然頻率wn = √15.2 = 3.9,如果要達到阻尼比為 1,則回授增益 Kq必須滿足 8.1Kq= 7.8 (3.11) 因此Kq = 7.8/8.1 ≈ 1。我們選擇Kq = 1,針對(3.10)式設計比例積分控制器,如 圖 3-5 所示。 圖 3-5 利用比例積分控制器設計(3.10)式系統,其中Kq= 1
20 圖 3-5 可以計算ayc到ay的閉迴路轉移函數為
ay(s) ayc(s)
=
−1743Kas−1743Ki s3+8.1s2+(15.2−1743Ka)s−1743Ki (3.12)由(3.12)式利用羅斯-赫維茲穩定法則(Routh-Hurwitz Stability Criterion)[9]可建 立羅斯表: s3 1 (15.2 − 1743K a) s2 8.1 −1743K i s c1 1 −1743Ki 其中c1 = (8.1(15.2 − 1743Ka) + 1743Ki)/8.1。依據羅斯-赫維茲穩定法則,閉 迴路轉移函數的分母每項係數正負必須為同號。因此 Ka < 15.2/1743 = 0.0087 (3.13) Ki < 0 (3.14) 且羅斯表第一列正負必須為同號,因此 123.12 − 14118.3Ka+ 1743Ki > 0 (3.15) Ka、 Ki必須符合(3.13)式~(3.15)式。 加入比例積分控制器相當於在開迴路系轉移函數中加入一個極點(s = 0)以 及一個零點(s = −Ki Ka)。由於加入的極點比加入的零點靠近虛軸,所以比例積分 控制器為相位落後(phase lag)的補償,主要是用來達到步階響應的穩態追蹤。 Ka、Ki值要選擇適當,才能達到好的暫態響應。 接下來進行Ka、Ki值選擇的討論,先利用線性模型作討論,再將選取Ka、Ki 值放入非線性飛彈模型中,並比較線性模式與非線性模式的差異。已知Kq = 1, 則圖 3-5 中ayc到ay的開迴路轉移函數為 G(s) =−1743Ka(s+Ki/Ka) s(s2+8.1s+15.2) (3.16) 若選擇開迴路零點位置為-1,即KKi a = 1,則(3.16)式的根軌跡為圖 3-6 所示。利
21 用圖 3-6 根軌跡圖找尋適當閉迴路極點位置的Ka,且已知KKi a= 1,由Ka來決定Ki 的值。Ka選擇越小的閉迴路實根極點越遠離虛軸,而閉迴路複數根極點越遠離實 軸。因此Ka越小系統響應速度會增加,但超越量也會增加。 圖 3-6 零點在-1 的根軌跡圖(Ka < 0) 表 3-1 為線性模型開迴路零點在-1 時,選擇不同Ka及Ki加速度命令為 2g 的步階 函數暫態響應比較。線性模型中加速度系統響應不會有低射現象,上升時間為系 統從終值的 10%到 90%的時間,安定時間為系統進入終值±2%的時間。由表 3-1 可知選擇Ka、Ki值越小,系統響應速度越快但超越量越大。圖 3-7 及圖 3-8 分別 為加速度命令為 2g 的步階函數時,加速度和尾翼角響應圖比較。 表 3-1 線性模型零點在-1 時不同Ka、Ki的加速度暫態響應比較 Ka = Ki 最大超越量 最小低射 上升時間 安定時間 閉迴路極點位置 −0.01 0% 0g 2.298s 4.961s -0.6,-3.74±3.74j −0.02 0% 0g 0.4125s 3.178s -0.78,-3.6±5.5j −0.03 5% 0g 0.263s 2.449s -0.86,-3.6±6.9j −0.04 12% 0g 0.201s 1.997s -0.88,-3.6±8.1j
22 圖 3-7 線性模型零點在-1 時不同Ka、Ki的加速度響應比較 圖 3-8 線性模型零點在-1 時不同Ka、Ki的尾翼角響應圖比較 再來比較選擇開迴路零點位置在-2 時,即KKi a = 2,不同Ka、Ki的情形,圖 3-9 為開迴路零點位置在-2 的根軌跡圖。零點位置在-2 的系統閉迴路實根極點比零 點在-1 時的系統遠離虛軸,閉迴路極點複數根稍微靠近實軸與虛軸。系統比較 受實根遠離的影響,使得系統響應越快,但超越量越大。輸入加速度命令為 2 g 的步階函數,表 3-2 顯示Ka、Ki越小系統響應越快,但超越量越大。與表 3-1 比較之,在相同的Ka情況之下,開迴路零點位置越遠離虛軸,系統響應越快,但
23 超越量越大。圖 3-10 及圖 3-11 分別為加速度和尾翼角響應圖比較。 圖 3-9 零點在-2 的根軌跡圖(Ka < 0) 表 3-2 線性模型零點在-2 時不同Ka、Ki的加速度暫態響應比較 Ka Ki 最大超越量 最小低射 上升時間 安定時間 閉迴路極點 -0.01 -0.02 0% 0g 0.627s 1.883s -1.6,-3.3±3.4j -0.02 -0.04 9.4% 0g 0.308s 1.401s -1.8,-3.1±5.4j -0.03 -0.06 18.4% 0g 0.219s 1.162s -1.9,-3.1±6.7j 圖 3-10 線性模型零點在-2 時不同Ka、Ki的加速度響應比較
24 圖 3-11 線性模型零點在-2 時不同Ka、Ki的尾翼角響應圖比較 選擇開迴路零點位置在-3 時,輸入加速度命令為 2g 的步階函數,表 3-3 為加速 度暫態響應比較,圖 3-12、圖 3-13 分別為加速度和尾翼角響應圖比較。表 3-3 顯示暫態響應很快但超越量變得很大,也造成安定時間很長,不符合我們的要求。 因此不再討論零點小於-3 的情況。 表 3-3 線性模型零點在-3 時不同Ka、Ki的加速度暫態響應比較 Ka Ki 最大超越量 最小低射 上升時間 安定時間 閉迴路極點 -0.01 -0.03 9% 0g 0.452s 1.441s -3.02,-2.5±3.2j -0.02 -0.06 22.3% 0g 0.315s 1.422s -3.01,-2.5±5.3j 圖 3-12 線性模型零點在-3 時不同Ka、Ki的加速度響應比較
25 圖 3-13 線性模型零點在-3 時不同Ka、Ki的尾翼角響應圖比較 在線性模型中相同Ka的情況下,開迴路零點位置越遠離虛軸,系統響應越快, 但超越量越大。相同開迴路零點位置的情況下,Ka越小系統響應速度會增加,但 超越量也會增加。尾翼角響應與超越量的大小有關,超越量越大則尾翼角需要的 角度也越大。從以上討論中選擇一組數據使系統最大超越量不大且響應速度快。 選擇開迴路零點位置在-2 時,Ka= −0.02、Ki = −0.04,為線性模式系統較佳 的響應設計。 再來討論比例積分控制器在實際非線性飛彈模型中進行步階響應的模擬。輸 入加速度命令 2g 的步階函數,討論閉迴路零點位置在-1、-2 及-3 時,不同Ka及 Ki值非線性系統的暫態響應比較。表 3-4 為選擇開迴路零點位置為-1 系統輸入 加速度命令 2g 步階響應的比較,圖 3-14、圖 3-15 分別為加速度和尾翼角響應。 表 3-4 非線性模型零點在-1 時不同Ka、Ki的加速度暫態響應比較 Ka = Ki 最大超越量 最小低射 上升時間 安定時間 閉迴路極點 −0.01 0% -0.172g 2.388s 5.372s -0.6,-3.74±3.74j −0.02 0% -0.392g 1.072s 3.183s -0.78,-3.6±5.5j −0.03 0% -0.648g 0.122s 2.453s -0.86,-3.6±6.9j −0.04 29% -0.904g 0.062s 1.982s -0.88,-3.6±8.1j
26 圖 3-14 非線性模型零點在-1 時不同Ka、Ki的加速度響應比較 圖 3-15 非線性模型零點在-1 時不同Ka、Ki的尾翼角響應圖比較 若選擇開迴路零點位置為-2,表 3-5 為加速度命令為 2g 的步階函數時不同Ka、Ki 值的加速度暫態比較,圖 3-16、圖 3-17 分別為加速度、尾翼角響應圖。 表 3-5 非線性模型零點在-2 時不同Ka、Ki的加速度暫態響應比較 Ka Ki 最大超越量 最小低射 上升時間 安定時間 閉迴路極點 -0.01 -0.02 0% -0.181g 0.799s 1.529s -1.6,-3.3±3.4j -0.02 -0.04 1.5% -0.401g 0.257s 1.503s -1.8,-3.1±5.4j -0.03 -0.06 13.1% -0.675g 0.101s 1.475s -1.9,-3.1±6.7j
27 圖 3-16 非線性模型零點在-2 時不同Ka、Ki的加速度響應比較 圖 3-17 非線性模型零點在-2 時不同Ka、Ki的尾翼角響應圖比較 若選擇開迴路零點位置為-3,輸入加速度命令為 2g 的步階函數,表 3-6 為不同 Ka、Ki值的加速度暫態比較,圖 3-18、圖 3-19 分別為加速度、尾翼角響應圖。 表 3-6 非線性模型零點在-3 時不同Ka、Ki的加速度暫態響應比較 Ka Ki 最大超越量 最小低射 上升時間 安定時間 閉迴路極點 -0.01 -0.03 6.6% -0.188g 0.497s 1.906s -3.02,-2.5±3.2j -0.02 -0.06 12.9% -0.411g 0.189s 1.112s -3.01,-2.5±5.3j
28 圖 3-18 非線性模型零點在-3 時不同Ka、Ki的加速度響應比較 圖 3-19 非線性模型零點在-3 時不同Ka、Ki的尾翼角響應圖比較 比例積分控制器放入非線性模型與線性模型的響應非常相近,非線性模型擁 有與線性模型相同的特性:開迴路零點位置選擇越遠離虛軸,系統的響應主要受 系統實根遠離所影響,因此響應速度越快,但超越量會越大。Ka值選取的越小, 代表系統實根越遠離虛軸,複數根越遠離實軸,因此響應速度越快,超越量會越 大。最大的不同是非線性模型的加速度響應有低射現象,實際上的非線性飛彈模 型具有右半面零點,而線性模型忽略了零點的影響,因此線性模型沒有低射的現 象。且相同的Ka、Ki數值下,非線性模型的響應速度較慢,超越量較大。由以上 數據分析,我們選擇一組數據使得系統最大超越量不大且響應速度快,與線性模 型相同仍然選擇零點在-2時,Ka = −0.02、Ki = −0.04,為較佳的響應設計。
29
第四章
攔截飛彈的複合控制設計
本章介紹兩種設計複合控制的方法。設計一是將線性的純尾翼控制輸入視為 一個匹配式干擾(matched disturbance),利用順滑模控制對雜訊的穩健性直接設計 側向推力控制。設計二是將側向推力視為一個單輸入控制,利用順滑模控制來設 計包含純尾翼控制的飛彈模型。4.1 節介紹設計一複合控制的設計,4.2 節介紹 設計二複合控制的設計,4.3 節討論降低側向推力時系統響應的影響。4.1 設計一複合控制
4.1.1 節利用飛彈的相關方程式我們可以計算出狀態為攻角以及角速度的 非線性動態方程式,將其線性化後 4.1.2 節再將方程式修正為我們可以得到的回 授狀態資訊。4.1.3 節利用修正後的動態方程式作側向推力的順滑模設計,4.1.4 節提供了切跳較理想的切跳函數,4.1.5 說明尾翼控制融合側向推力的複合控制 設計,4.1.6 節則是修正側向推力過大的現象。 4.1.1 推導攔截飛彈動態方程式 在第三章尾翼控制系統設計中我們利用模擬的方法建立飛彈從尾翼至加速 度及角速度的線性簡化模式。複合控制系統必須同時使用尾翼及側向推力兩個致 動器,因此必須根據以這兩個致動器為輸入的飛彈動態模式來設計。我們首先根 據第二章所描述的飛彈動態方程式來得到線性化的模式。從圖 2-4 二為飛彈示意 圖可以知道 θ − α = γ = tan−1(vNy vNx) (4.1) 其中vNy為飛彈速度在地面座標YN方向的分量,vNx為飛彈速度在地面座標XN方 向的分量,θ為姿態角,α為攻角,γ為飛行路徑角。將(4.1)式微分可得30 γ̇ = aNyvNx−vNyaNx vNx2+vNy2 = θ
̇
− α̇
(4.2) 其中aNy為飛彈加速度在地面座標YN方向的分量,aNx為飛彈加速度在地面座標 XN方向的分量,vNy為飛彈速度在地面座標YN方向的分量,vNx為飛彈速度在 地面座標XN方向的分量。速度分量可以表示成{vvNx= vcosγ = vcos(θ − α) = v(cosθcosα + sinθsinα)
Ny = vsinγ = vsin(θ − α) = v(sinθcosα − cosθsinα) (4.3)
其中v為飛彈速度。加速度分量可以表示成
{aaNx = −aysinθ + axcosθ
Ny= aycosθ + axsinθ (4.4) 其中ay為飛彈加速度在體座標YB方向的分量,ax為飛彈加速度在體座標XB方向 的分量。因加速度在體座標XB方向的分量ax不大,忽略其影響,則 aNyvNx= ayvcosθcosθcosα + ayvcosθsinθsinα (4.5) vNyaNx= ayvsinθcosθsinα − ayvsinθsinθcosα (4.6) 且已知 v2 = v Nx2+ vNy2 (4.7) 將(4.5)式~(4.7)式代入(4.2)式 θ̇ − α̇ = ayv[cosα(cos2θ+sin2θ)] v2
=
aycosα v (4.8) 利用θ̇ = q及加速度ay方程式(2.35)式,可以得到α̇ = q −Yαα+Yδδ+T mv cosα
(4.9) 其中Yα 為攻角的氣動力係數,Yδ為尾翼角的氣動力係數,m 為飛彈質量,T 為距 離質心 b 公尺的側向推力,δ為尾翼角。又由轉動方程式(2.38)式可得 q̇ =Mαα+Mδδ+bT I
(4.10) 其中I為轉動慣量,Mα為攻角的氣動力矩係數,Mδ為尾翼角的氣動力矩係數。由 (4.9)式、(4.10)式和加速度方程式(2.35),假設攻角α很小,即cosα ≈ 1,可以得 到一線性化動態方程式
31 [α̇q̇] = [−
Y
α mv 1 Mα I 0 ] [αq] + [− Yδ mv − 1 mv Mδ I b I ] [δ T]ay = [Yα m
0
] [ α q] [Ymδ 1 m] + [δT](4.11)
如果將表 2-1 的飛彈參數代入(4.11)式,則可以得到狀態方程式 [α̇q̇] = [−0.16 1−15.7 0] [αq] + [−9.6 × 10−3 −2.25 × 10−6 −10.1 8.8 × 10−4 ] [δT]
a
y= [
195 0] [
αq]
+[
11.7 2.7 × 10−3] [
δT]
(4.12) 以上所考慮的情況皆為攻角很小,若攻角大的話有可能會與線性化後的結果 有所差距。因此接下來我們做個簡單的驗證,單獨輸入尾翼角以及側向推力進入 圖 3-1 開迴路系統,比較非線性系統與線性系統(4.11)式的響應,在較大的攻角 之下,線性化後的結果是否與實際的結果相符合。 圖 4-1 中我們輸入 40 度步階函數的尾翼角,使得攻角能到達 50 度左右。圖 4-1 上圖為加速度響應,紅色線為線性系統(4.11)式的響應,藍色線為非線性系 統的響應。下圖為非線性系統的攻角響應,攻角最大會達到 50 度左右。從圖 4-1 可知兩個加速度響應結果差不多,顯示尾翼到加速度間的線性化轉移函數不會因 為攻角變大而有太大的改變。而圖 4-2 為輸入 8000N 步階函數側向推力的響應, 攻角可以達到 50 度左右。紅色線為線性系統的響應,藍色線為非線性系統的響 應。從圖中可以得知線性化後的響應與非線性系統的響應相差不大。 圖 4-1 及圖 4-2 顯示線性化後系統的正確性,在角度 50 度左右時響應誤差 並不大,而飛彈在一般情形下攻角大致不會超過 50 度。因此我們便能使用此線 性化後的狀態方程式來設計順滑模控制。32
圖 4-1 輸入 40 度步階函數尾翼角加速度以及攻角響應圖
圖 4-2 輸入 8000N 步階函數的側向推力加速度以及攻角響應圖
4.1.2 線性化動態方程式的修正
33 角速度q來作回授之用,因此要嘗試將攻角的角色用加速度ay來取代。現在將(4.11) 式中ay微分可得 ȧy = Yα mα̇ + Yδ mδ̇ + 1 mṪ (4.13) (4.11)式中可得 α̇ = −Yα mvα + q − Yδ mvδ − 1 mvT (4.14) q̇ =Mα I α + Mδ I δ + b I T (4.15) 同時引進尾翼及側向推力致動器的一階動態方程式: δ̇ = − 1 τδδ + 1 τδδc Ṫ = −τ1 TT + 1 τTTc (4.16) 其中τδ及τT分別為尾翼以及側向推力致動器的時間常數,δc及Tc分別為尾翼以及 側向推力致動器的命令。時間常數τδ及τT我們取 0.02。將(4.14)、(4.16)式代回 (4.13)式可得 ȧy = Ymα(−mvYαα + q −mvYδδ −mv1 T) +Ymδ(−τ1 δδ + 1 τδδc) + m1(−τ1 TT + 1 τTTc)
(4.17)
(4.11)式中α可以表示為 α =Ym α(ay− Yδ mδ − 1 mT) (4.18) 將(4.18)式代入(4.17)式可得 ȧy = −Yα mvay+ Yα mq − Yδ τδmδ − 1 τTmT + Yδ m 1 τδδc+ 1 mτTTc (4.19) 將(4.18)式代入(4.15)式可得 q̇ =Mαm YαI ay+ (Mδ−MαYαYδ) I δ + (b−MαYα) I T (4.20) (4.16)式、(4.19)式、(4.20)式以矩陣形式表示
34 [ ȧy q̇ δ̇ Ṫ ] = [ −mvYα Yα m − Yδ τδm − 1 τTm Mαm YαI 0 (Mδ−MαYαYδ) I (b−MαYα) I 0 0 −τ1 δ 0 0 0 0 −τ1 T ] [ ay q δ T ] + [ Yδ mτδ 1 mτT 0 0 1 τδ 0 0 τ1 T ] [δTc c] (4.21) 我們便利用(4.20)式來設計順滑模控制器。如果將表 2-1 的飛彈參數代入(4.21) 式,則可以得到狀態方程式 [ ȧy q̇ δ̇ Ṫ ] = [ −0.16 195.1 −585.2 −0.14 −0.08 0 −9.1 0.001 0 0 −50 0 0 0 0 −50 ] [ ay q δ T ] + [ 585.2 0.14 0 0 50 0 0 50 ] [δTc c] (4.22) 4.1.3 設計順滑模控制器 順滑模設計有兩個步驟,一是設計順滑函數,二是設計控制定律。我們要控 制的變數為加速度,令加速度誤差為 e = ay − ayc (4.23) 則順滑函數設計為 s(x) = e (4.24) 再來設計控制定律,必須符合順滑迫近條件: sṡ < 0 (4.25) 我們只利用順滑模控制來設計側向推力,將尾翼的影響視為干擾,可令 ȧy = fx + gu +mτYδ δδc (4.26) 其中f = [−mvYα Ymα − Yδ τδm − 1 τTm] ,x = [ a q δ T ] , g =mτ1 T,u = Tc。 將順滑函數代入順滑迫近條件,則 sṡ = sė = s(ȧy− ȧyc)
35 = s (fx + gu + Yδ mτδδc− ȧyc) < 0 (4.27) 為了符合順滑迫近條件(4.25)式,我們必須設計一個控制定律當s > 0時, (fx + gu + Yδ mτδδc− ȧyc)會小於 0,反之s < 0時,(fx + gu + Yδ mτδδc− ȧyc)會大於 0,保證sṡ < 0。一般來說控制定律設計分別為兩部分:消除已知項以及上順滑面 的切跳項。消除已知項的部分為: u1 =1g(−fx+ȧyc ) (4.28) 上順滑面的切跳項部分為: u2 =1g(−σsign(s)) (4.29) 其中σ > 0為速度參數,σ值越大上去順滑模平面速度越快。我們將u = u1+ u2代 回(4.27)式 sṡ = s (mτYδ δδc− σsign(s)) < 0 (4.30) 尾翼角限制在±45度, Yδ mτδδc最大可以達到將近±460。從(4.30)式可以知道σ值選 為大於 460 可以確保符合sṡ < 0。若σ 值選擇小於 460,尾翼角若太大則可能會 使響應無法穩定,σ 值的選取由模擬的結果來調整。 此外使用切換函數sign(s)系統軌跡會在順滑平面s = 0的兩邊不斷跳動,造 成許多不當的高頻雜訊。為了防止切跳過大,設定一個邊界層(boundary layer), 將切跳函數修正為(2.27)式。最後修正控制定律設計如下: uTc= u1− 1 gσsat(s, ε) ε = 0.1,σ = 1200 (4.31) σ值不能太小,否則系統切跳速度不夠快,無法上到順滑面,須選取一個較 大的數值,然而𝜎太大雖然可以讓系統響應變快,亦會造成切跳太大,所需的側 向推力也越大。ε的數值調大系統在邊界層內比較順滑,可以降低切跳大小,但 會使穩態誤差變大,造成系統追加速度命令精準度的下降。這裡選取一組數值讓
36 系統加速度追上命令快速,且側向推力適中。因為切跳幅度不大,選取ε值可以 較小,使的整個響應更為精確。 4.1.4 修正型的切跳函數 一般來說順滑模控制雖然響應速度快,但卻有響應切跳的情形產生。可以利 用設立邊界層來解決問題,使的在邊界層內的切跳不要這麼大。文獻[10]提出了 一個修正型的切跳函數:
ν
ρ(s) =
s (|s|+ρ) (4.32) ρ設為一個小的正數。當ρ → 0,νρ(s)則為sign(s)的函數。ρ的設定可以使切 跳的函數更順滑,ρ越大則系統響應切跳越小但穩態誤差越不精確,越小則反之。 圖 4-3 為不同ρ所形成的切跳函數比較。圖 4-4 為一般切跳函數sat(s, ε),ε = 0.1 和修正後切跳函數νρ(s),ρ = 0.005的比較。黑色線為sat(s, ε)函數,紅色線為 νρ(s)函數,修正後切跳函數νρ(s)響應較sat(s, ε)函數順滑,能降低切跳,因此我 們利用νρ(s)函數取代sat(s, ε)切跳函數。 圖 4-3 修正型的切跳函數不同ρ值得比較37 圖 4-4 修正型與一般切跳函數比較 4.1.5 設計一複合控制設計 在這裡我們將線性的尾翼控制命令視為干擾,利用順滑模控制對雜訊的穩健 性,直接設計側向推力控制器。我們設計複合控制的概念是尾翼為主要控制,系 統在追蹤時主要由尾翼來達到加速度控制要求,在需要使用側向推力時才將側向 推力打開。因此尾翼控制必須是個獨立的系統,在側向推力加進來時仍保有一部 分自己的響應。側向推力只是輔助的作用,藉由推力快速的改變攻角,使系統響 應速度加快。我們可以利用上述的順滑模控制來控制側向推力,作為輔助的配 合。 設計的方法為尾翼角負責 80%的加速度命令,讓尾翼控制做為主要的控制, 然而側向推力負責 20%的加速度命令,作為輔助的控制。我們在回授回來的資訊 後面加個切換開關,當開關打開時加速度命令和回授的加速度乘以 0.8 傳給線性 的尾翼控制,乘以 0.2 傳給順滑模側向推力控制。複合控制以及尾翼控制經由開
38 關來作切換,以便能隨時快速的轉換。整體控制設計如下,線性尾翼控制設計: Ka = −0.02、Ki = −0.04、Kq = 1 (4.33) 最後修正順滑模控制定律為 uTc= u1− 1 gσ s (|s| + ρ) ρ = 0.005,σ = 1200 (4.34) 接下來比較不同比例尾翼及側向推力所造成的結果,以(4.33)式的線性參數 以及(4.34)式的控制來做模擬。輸入加速度命令 2g 步階函數,比較其差異。表 4-1 中上升時間為系統從終值 10%到達 90%的時間,加入側向推力上升時間比尾 翼控制還要快。整體而言尾翼與側向推力比例為 9:1,8.5:1.5,8:2,7:3 這幾 組的響應的結果差不多,上升時間非常相近。從圖 4-5 可以看出 8:2 這組追加速 度 2g 的步階函數追得較精確,因此選擇尾翼 80%以及側向推力 20%的組合。 表 4-1 不同比例尾翼及側向推力的上升時間比較 尾翼比例 側向推力比例 上升時間 100% 0% 0.270 90% 10% 0.0148 85% 15% 0.0147 80% 20% 0.0146 70% 30% 0.0145
39
圖 4-5 不同比例尾翼及側向推力的響應圖
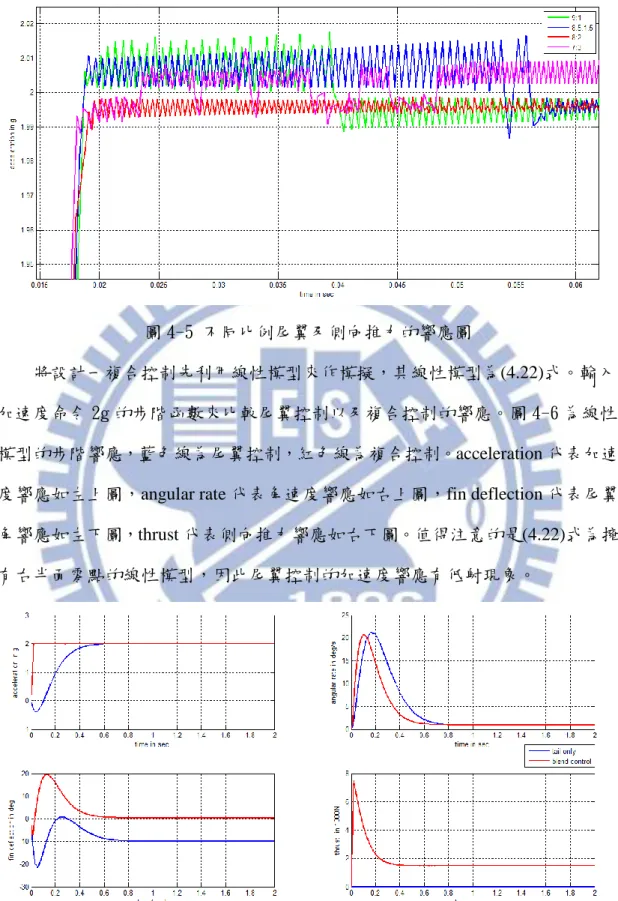
將設計一複合控制先利用線性模型來作模擬,其線性模型為(4.22)式。輸入 加速度命令 2g 的步階函數來比較尾翼控制以及複合控制的響應。圖 4-6 為線性 模型的步階響應,藍色線為尾翼控制,紅色線為複合控制。acceleration 代表加速 度響應如左上圖,angular rate 代表角速度響應如右上圖,fin deflection 代表尾翼 角響應如左下圖,thrust 代表側向推力響應如右下圖。值得注意的是(4.22)式為擁 有右半面零點的線性模型,因此尾翼控制的加速度響應有低射現象。
圖 4-6 輸入加速度命令 2g 的複合控制線性模型步階響應
40 來比較尾翼控制以及複合控制的響應。圖 4-7 中顯示複合控制的加速度響應比尾 翼控制還要快且沒有低射現象,加入側向推力對系統響應幫助非常大。圖 4-8 上圖為尾翼角響應,下圖為攻角響應。複合控制的攻角響應雖然比較快達到穩定, 但卻比尾翼控制時下降許多,造成系統需要額外的側向推力來達到平衡。此外非 性線模型的步階響應與線性模型的步階響應非常相近,也顯示線性化模型與非線 性模型的差異並不大。 圖 4-7 輸入加速度命令 2g 的複合控制非線性步階響應(1) 圖 4-8 輸入加速度命令 2g 的複合控制非線性步階響應(2)
41 4.1.6 側向推力穩態過大的改善 圖 4-8 下圖顯示複合控制穩態時的攻角比尾翼控制穩態時的攻角下降許多, 這些下降的氣動力必須由尾翼角以及側向推力來補足,造成尾翼角在加入側向推 力時尾翼角會往正方向提升,側向推力也需要提供更多的力。因此必須調整尾翼 角以及側向推力的使用,讓攻角提升。 當加速度命令正在增加時,側向推力會正向提升,使尾翼角往正的方向擺動, 造成攻角下降。因此將順滑模控制所給予的側向推力命令減掉一部份的力,然後 額外給予負向的尾翼角命令,此時攻角會上升來補足側向推力及尾翼角下降的氣 動力。當加速度命令正在減少時,側向推力會下降且尾翼角會往負向擺動,攻角 會上升。因此必須將側向推力命令加上一部份的力,然後額外給予正向的尾翼角 命令,使攻角下降。 加速度命令 9g 步階函數時因為尾翼角最大只能到 45 度,尾翼角無法補足太 多,側向推力下降的力也有限度。因此加速度命令 9g 時,尾翼增加至將近 45 度,側向推力命令減掉 900N 穩態就會下降至 0N。我們將側向推力需要增加或 減少的力固定為 900N,藉由調整補足的尾翼角大小使得攻角能夠達到純尾翼控 制時的大小。表 4-2 為輸入 1~10g 的步階函數時,側向推力命令減少 900N,穩 態時攻角能夠達到尾翼控制時的大小,且穩態的側向推力能下降至 0N,所要補 足的尾翼角命令δ′大小。 表 4-2 補足尾翼角與加速度命令關係 圖 4-9 及圖 4-10 為 2g 步階響應改善前後的比較。藍色線為尾翼控制(tail only),紅色線為原本的複合控制(original),綠色線為側向推力命令減少 900N, 加速度命令(g) 10g 9g 8g 7g 6g 補足尾翼角(rad) -0.2 -0.38 -0.44 -0.47 -0.45 加速度命令(g) 5g 4g 3g 2g 1g 補足尾翼角(rad) -0.42 -0.38 -0.26 -0.19 -0.1
42 尾翼角命令減少-0.19 rad 的複合控制改善設計(improvement)。圖 4-10 中複合控 制改善設計的尾翼角以及攻角穩態時皆有提升到尾翼控制的大小,圖 4-9 中複合 控制改善設計的側向推力在穩態時可以下降至 0N 且加速度響應與原本的複合控 制一樣。 圖 4-9 改善後的複合控制 2g 步階響應比較(1) 圖 4-10 改善後的複合控制 2g 步階響應比較(2) 然而一般追蹤導引並不會立刻就改變這麼大的 g 力,且表 4-2 中加速度 4g 以上 所需補足的尾翼角變得比較大,容易造成攻角過度提升,側向推力反而需要負向 的力來抵銷。因此我們只考慮加速度 1~3g 所補足的尾翼角,取中間值-0.18rad。
43 假設加速度命令 0~2 秒為 2g 的步階函數,2~4 秒為-1g 的步階函數,4~6 秒為 1g 的步階函數,當加速度增加時側向推力命令減掉 900N,補足尾翼角δ′ =-0.18 rad; 當加速度減少時側向推力命令加上 900N,補足尾翼角δ′=0.18 rad。其改善的複 合控制響應為圖 4-11、圖 4-12,藍色線為改善前的複合控制(original),紅色線 為改善後的複合控制(improvement)。 圖 4-11 加速度命令不同的步階函數複合控制改善前後的比較(1) 圖 4-12 加速度命令不同的步階函數複合控制改善前後的比較(2) 圖 4-12 下圖顯示攻角響應改善後較改善前提升許多,但圖 4-11 側向推力響應圖 中加速度-1g 與 1g 的穩態側向推力皆越過了 0N。顯示補足的尾翼角太大,使攻
44 角過度提升。因此補足的尾翼角大小不能太大,寧願側向推力下降的少,也不要 讓側向推力下降至反方向,反而比原本的力道還大。圖 4-11 側向推力響應圖中 加速度-1g 與 1g 的穩態側向推力雖然到達了反方向,但比原本的力道小,仍有改 善的成效。因此我們利用補足尾翼角δ′大小為 0.18 rad 來作改善設計。其統整如 下: uTc= u1 − 1 gσ s (|s| + ρ)− 900sign(ȧyc) δ′ = −0.18sign(ȧyc) ρ = 0.005,σ = 1200 (4.35) 若加速度命令為步階函數,加速度命令步階函數大小增加則視ȧyc > 0,加速度 命令步階函數大小減少則視ȧyc < 0。圖 4-13 為複合控制修正的設計架構。 圖 4-13 設計一複合控制的修正設計
4.2 設計二複合控制
利用第三章的系統驗證的方法我們可以得到尾翼角到加速度及角速度的轉 移函數,以及側向推力到加速度及角速度的轉移函數。4.2.1 節我們用近似的方 式將這兩組轉移函數轉換成一個動態方程式,在 4.2.2 節我們便利用此動態方程 式設計順滑模控制。此設計方法仍然有側向推力過大的情形,4.2.3 節也提出修45 正的設計。 4.2.1 推導攔截飛彈動態方程式 由第三章所分析,我們利用系統驗證可以得到轉移函數ay(s) δc(s)及 q(s) δc(s)