國
立
交
通
大
學
運 輸 科 技 與 管 理 學 系 碩 士 班
碩 士 論 文
行人流行人移動行為之超越移動特性與模式之研究
A Study on Characteristics and Modeling of Pedestrian Overtaking
Behavior within Pedestrian Flow
研 究 生:蕭禎祥
指導教授:吳水威
行人流行人移動行為之超越移動特性與模式之研究
A Study on Characteristics and Modeling of Pedestrian
Overtaking Behavior within Pedestrian Flow
研 究 生:蕭禎祥 Student:Chen-Hsiang Hsiao
指導教授:吳水威 Advisor:Shoei-Uei Wu
國 立 交 通 大 學
運 輸 科 技 與 管 理 學 系
碩 士 論 文
A ThesisSubmitted to Institute of Transportation Technology and Management College of Management
National Chiao Tung University in partial Fulfillment of the Requirements
for the Degree of Master
in
Transportation Technology and Management June 2009
Hsinchu, Taiwan, Republic of China
行人流行人移動行為之超越移動特性與模式之研究
研究生:蕭禎祥
指導教授:吳水威
國立交通大學運輸科技與管理學系碩士班
摘 要
本研究探討行人超越行為,藉由現場錄影觀察,選取出符合本研究所需 樣本資料,利用 SPSS 軟體進行統計分析,討論各種變因與性別之間相互關 係。經本研究觀察發現行人在超越時會有四種模式,其中本研究建構三種模 式,分別為直行超越行為、偏向直行超越行為與直行超越偏向行為。由錄影 資料中獲得行人之位移,個別求取速度、加速度、前後行人間距離、偏向角 度與完成行為之時間等影響變因參數,先探討各種變因與性別之間關係,並 利用後方行人速度此項變數,使用線型迴歸方法構建行人超越行為。結果發 現,本研究所建構之三種行人超越行為模式,均方誤差 RMSE(Root Mean Square Error)均不會大於 40,平均絕對誤差百分比 MAPE(Mean Absoulte Percentage Error)不會超過 30%,經由資料驗證 三種模式之 MAPE 均不會 超過 20%。表示本研究所建構之模式能有效預測行人超越行為。關鍵詞:行人超越行為特性、直行超越模式、偏向直行超越模式、直行超越偏向 模式
II
A Study on Characteristics and modeling of Pedestrian
Crossing and Overtaking Behavior within Pedestrian flow
Student:Chen-Hsiang Hsiao
Advisor:Dr. Shoei-Uei WuDepartment of Transportation Technology & Management National Chiao Tung University
Abstract
This research discusses pedestrian’s overtaking the behavior, according to the scene video recording observation, selects conforms to this research institute to need the sample material, carries on the statistical analysis using the SPSS software, discusses each kind changes and between the sex the reciprocity. After this research observation discovered pedestrian when overtaking will have four kinds of patterns, this research will construct three kinds of patterns, Acrossing behavior, Overtaking then acrossing behavior, Acrossing then overtaking behavior.Obtains displacement of the pedestrian by the video recording material, speed, acceleration, pedestrian distance, the deviation angle and complete time etc.Discusses each kind changes first relates with the sex, and using rear pedestrian speed this variable, the use linear return method constructs the pedestrian to overtaking the behavior. As the result, the research modeling of third the kind of pedestrians patterns, Root Mean Square Error the mean error will not be greater than 40, Mean Absoulte Percentage Error the average not to exceed 30% to the erroneous percentage, to test and verify by using MAPE of three kind of pattern, by way of the material not to surpass 20%.Expressed that pattern of this research institute construction can forecast effectively the
pedestrian overtaking the behavior
Keywords: Pedestrian overtaking characteristic behavior, Direct overtaking model, Deflection-direct overtaking model, Direct
誌 謝
本論文得以順利完成,首先要感謝的是指導教授 吳水威博士,恩師在論文 撰寫過程,不斷耐心指導與細心的教學,讓學生從中學習許多,是為學生學習之 典範。在生活上,恩師作事情嚴謹與不猶豫的積極態度,以及待人處世的圓融, 給予學生相當大的啟發,獲益良多。在此,謹致學生對於 恩師最誠摯的謝意與 敬意。 在口詴期間,承蒙中華大學運輸科技與管理學系蘇昭銘老師與本系吳宗修老 師撥冗細閱,並提供寶貴的意見,使本論文謬誤與疏漏之處得以斧正;期中審查 亦要感謝卓訓榮老師與吳宗修老師詳細審閱,並感謝韓復華老師與任維廉老師於 論文研討課程給予寶貴的意見與建議,使論文更甄嚴謹完備。學生於授業期間, 承蒙系上各位老師們給予學生在課業研究的教導,更要感謝李明山老師對待學生 給予許多幫助。 求學的過程中有苦也有樂,不論生活上或是課業上,在交大兩年的過程中, 有許多學習的對象與榜樣。感謝藍博士在很晚的晚上撥空與我討論,討論後總是 在實驗室受不了痛苦倒地,但換來的是開心與難忘抓兔子遊戲。感謝蔣哥哥在他 身上總是帶著一張很爽耍廢的臉孔,可是他的做事情的方法與敏銳的反應,不論 在計劃案與論文上,總是給我超級多的幫助。另外還有好友老總、ZZ、配飯、 協政、008、好室友們、高雄酒肉交陪們、不同實驗室的夥伴同學,陪伴我痛苦 與開心的時光。實驗室的生活中,過去的學長姐教導陪伴了許多,使我成長改變, 我看到了實在踏實奮鬥與興衰,現在願意付出的人時再是太少,施比受有福,學 習永無止盡,親身體驗會比空談的紥實,過去歷練所帶來的難過痛苦經歷,相信 在未來更能使得我成長茁壯。 最後,我非常感謝我的家人,沒有他們當初的支持我唸書,就沒有從交大畢 業的我,讓我學到這樣多的以前沒遇過的事情。在我求學的過程中,一路上跌跌 撞撞,從覺得沒用的自己甚至想放棄終結悔恨的過去,但這都過去了,我相信在 各個時段上都會有不同的貴人與幫助,能夠從交大畢業,要感謝父母外,也有許 多幫助過自己的人,曾經的失望與痛苦,都能在這甜美的回憶中度過。感謝上天 能夠給我這機會,我很開心我覺得我是有福氣的人,要感謝的人實在是太多,沒 有你們我學不到這樣多痛苦與感受到無比快樂,也讓我對於自己的未來更有目標 與動力。 未來還有更多自己想做的事情,研究所畢業是個遲到的結果也是個跳板,我 該做的事情還有很多,自己所欠缺的能力,不管在與人接觸與處理事情能力已有 基礎但仍然不足,期許自己未來能夠更努力做的更好,期望與我真的覺得該珍惜 相處的人好好的一同分享。 蕭禎祥 謹致 2008 年 6 月 新竹 交大IV
目錄
中文摘要 ...I 英文摘要 ... II 誌 謝 ... III 圖目錄 ... VI 表目錄 ... VIII 第一章 緒論 ... 1 1.1 研究背景與動機 ... 1 1.2 研究目的 ... 2 1.3 研究範圍與對象 ... 2 1.4 研究方法與流程 ... 2 1.5 研究架構 ... 6 第二章 文獻回顧 ... 7 2.1 行人行為特性 ... 7 2.1.1 影響行為因素觀測文獻 ... 7 2.1.2 行為模擬分析文獻 ... 11 2.2 人行空間 ... 13 2.2.1 人行步道 ... 14 2.2.2 捷運車站 ... 15 2.3 車輛變換車道方面 ... 16 2.3.1 行為門檻模式 ... 16 2.3.2 安全間距距離觀念 ... 17 2.3.3 變換車道之決策模式 ... 19 2.3.4 變換車道行為 ... 24 2.4 綜合評析 ... 27 第三章 理論基礎與研究方法 ... 29 3.1 理論基礎 ... 29 3.1.1 人流理論 ... 29 3.1.2 車流理論 ... 32 3.1.3 超車原理 ... 33 3.2 研究方法 ... 34 3.2.1 文獻評析法 ... 34 3.2.2 攝影調查法 ... 34 3.2.3 獨立樣本 t 檢定 ... 34 3.2.4 成對樣本 t 檢定 ... 35 3.2.5 卡方檢定 ... 35 3.2.6 統計迴歸法 ... 35 3.2.7 單因子變異數分析 ... 37 第四章 資料調查蒐集與特性分析 ... 39 4.1 引言 ... 39 4.2 資料調查 ... 40 4.2.1 資料調查方法 ... 40 4.2.2 調查地點 ... 40 4.3 資料認定方式與處理 ... 404.3.1 超越行人行為資料認定 ... 40 4.3.2 超越行人模式分類 ... 42 4.3.3 資料認定方式 ... 43 4.4 行人超越行為特性分析 ... 46 4.4.1 性別 ... 46 4.4.1.1 直行超越狀況 ... 46 4.4.1.2 偏向直行超越狀況 ... 47 4.4.1.3 直行超越偏向狀況 ... 47 4.4.2 速度 ... 48 4.4.2.1 直行超越狀況 ... 48 4.4.2.2 偏向直行超越狀況 ... 51 4.4.2.3 直行超越偏向狀況 ... 54 4.4.3 加速度 ... 57 4.4.3.1 直行超越狀況 ... 57 4.4.3.2 偏向直行超越狀況 ... 59 4.4.3.3 直行超越偏向狀況 ... 61 4.4.4 偏向角 ... 62 4.4.4.1 偏向直行超越狀況 ... 63 4.4.4.2 直行超越偏向狀況 ... 64 4.4.5 行人間距 ... 65 4.4.5.1 直行超越狀況 ... 65 4.4.5.2 偏向直行超越狀況 ... 67 4.4.5.3 直行超越偏向狀況 ... 69 4.4.6 跟隨至超越之時間 ... 71 4.4.6.1 直行超越狀況 ... 71 4.4.6.2 偏向直行超越狀況 ... 72 4.4.6.3 直行超越偏向狀況 ... 73 4.4.6.4 跟隨至超越時間之綜合比較 ... 74 4.5 小結 ... 77 4.5.1 直行超越行為 ... 77 4.5.2 偏向直行超越行為 ... 78 4.5.3 直行超越偏向行為 ... 80 第五章 模式建構與驗證分析 ... 82 5.1 模式建構 ... 82 5.1.1 直行超越模式 ... 82 5.1.2 偏向直行超越模式 ... 87 5.1.3 直行超越偏向模式 ... 93 5.2 模式實證與比較分析 ... 98 第六章 結論與建議 ... 100 6.1 結論 ... 100 6.2 建議 ... 102 參考文獻 ... 104
VI
圖目錄
圖 1 研究流程圖 ... 5
圖 2 研究架構圖 ... 6
圖 3 單向雙向人流示意圖 ... 9
圖 4 行為決策流程圖資料來源:Hoogendoorn, Bovy, Daamen ... 9
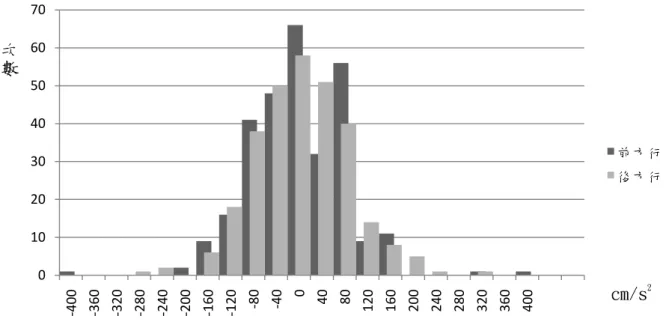
圖 5 Move、Avoid、Swirl 示意圖 ... 12 圖 6 模擬行人自我組織圖 ... 12 圖 7 同一車道前後車之相對運動過程示意圖 ... 16 圖 8 行為門檻關係圖 ... 17 圖 9 最差情況下座車避免碰撞前車之示意圖 ... 22 圖 10 下匝道車輛變換車道行為示意圖 ... 24 圖 11 行人速度與密度關係圖 ... 29 圖 12 行人流量與空間關係圖 ... 30 圖 13 行人速度與流量關係圖 ... 30 圖 14 行人速度與空間關係圖 ... 31 圖 15 行人行進過程中三大基本假設行為圖 ... 32 圖 16 行人超越前方行人步行移動之狀態圖 ... 39 圖 17 行人超越示意圖 ... 39 圖 18 忠孝西路館前路路口………...……….40 圖 19 忠孝西路與重慶南路路口………...………40 圖 20 中山北路與民生東路路口 ... 40 圖 21 行人寬度判別圖 ... 41 圖 22 行人超越前方行人可能角度圖 ... 42 圖 23 行人行走行為簡易圖 ... 43 圖 24 行人資料收集流程圖 ... 45 圖 25 直行超越前後行人速度百分比次數分配圖 ... 48 圖 26 偏向超越直行前後行人速度百分比次數分配圖 ... 52 圖 27 超越直行偏向前後行人速度百分比次數分配圖 ... 55 圖 28 直行超越前後行人加速度之百分比次數分配圖 ... 58 圖 29 偏向超越直行前後行人加速度之百分比次數分配圖 ... 60 圖 30 超越直行偏向前後行人加速度之百分比次數分配圖 ... 61 圖 31 行人間距示意圖 ... 65 圖 32 直行超越行人間距 D 次數分配圖 ... 66 圖 33 偏向超越直行行人間距 D 次數分配圖 ... 68 圖 34 超越直行偏向行人間距 D 次數分配圖 ... 70 圖 35 不同跟隨終止原因與其平均跟隨時間圖 ... 77 圖 36 直行超越之後方行人速度模式標準化殘差圖 ... 85 圖 37 直行超越之後方行人速度模式殘差 P-P 圖 ... 85 圖 38 直行超越之後方行人速度模式比較圖 ... 86 圖 39 偏向直行超越之後方行人模式標準化殘差直方圖 ... 90 圖 40 偏向直行超越之後方行人模式殘差 P-P 圖 ... 91 圖 41 偏向直行超越之後方行人速度模式比較圖 ... 92 圖 42 直行超越偏向之後方行人速度標準化殘差直方圖 ... 95 圖 43 直行超越偏向之後方行人速度殘差 P-P 圖 ... 96
VIII
表目錄
表 1 Hall 之人與人空間距離特性 ... 8 表 2 應用行人模擬法簡表 ... 11 表 3 歷年相關人流文獻比較表 ... 27 表 4 成對樣本 t 檢定 ... 44 表 5 卡方檢定 ... 44 表 6 性別與跟隨型態交叉比較表 ... 46 表 7 直行超越性別交叉比較表 ... 46 表 8 偏向超越直行性別交叉比較表 ... 47 表 9 直行超越偏向性別交叉比較表 ... 47 表 10 直行超越前後行人速度統計表 ... 48 表 11 直行超越前後行人速度成對 t 檢定表 ... 49 表 12 直行超越前後行人速度相關表 ... 49 表 13 直行超越後方超越者速度與性別獨立 t 檢定 ... 50 表 14 直行超越假設情況分類統計量表 ... 50 表 15 直行超越假設情況分類獨立 t 檢定 ... 51 表 16 偏向超越直行前後行人速度統計表 ... 51 表 17 偏向超越直行前後行人速度成對 t 檢定表 ... 52 表 18 偏向超越直行後方超越者速度與性別獨立 t 檢定 ... 53 表 19 偏向超越直行假設情況分類統計量表 ... 53 表 20 偏向超越直行假設情況分類獨立 t 檢定 ... 54 表 21 直行超越偏向前後行人速度統計表 ... 54 表 22 直行超越偏向前後行人速度成對 t 檢定表 ... 55 表 23 直行超越偏向後方超越者速度與性別獨立 t 檢定 ... 56 表 24 直行超越偏向假設情況分類統計量表 ... 56 表 25 直行超越偏向假設情況分類獨立 t 檢定 ... 57 表 26 直行超越前後行人加速度統計表 ... 58 表 27 直行超越前後行人速度成對 t 檢定表 ... 59 表 28 直行超越前後行人加速度相關表 ... 59 表 29 偏向超越直行前後行人加速度統計表 ... 59 表 30 偏向超越直行前後行人加速度成對 t 檢定表 ... 60 表 31 偏向超越直行前後行人速度相關表 ... 61 表 32 直行超越偏向前後行人加速度統計表 ... 61 表 33 直行超越偏向前後行人加速度成對 t 檢定表 ... 62 表 34 直行超越偏向前後行人速度相關表 ... 62 表 35 偏向超越直行偏向角與後方性別交叉比較表 ... 63 表 36 偏向超越直行偏向角與前方性別交叉比較表 ... 63 表 37 直行超越偏向偏向角與後方性別交叉比較表 ... 64 表 38 直行超越偏向偏向角與前方性別交叉比較表 ... 64 表 39 直行超越起始行人間距統計表 ... 66 表 40 直行超越後方行人性別與起始距離之獨立 t 檢定 ... 66 表 41 直行超越前後性別分組之距離統計表 ... 67 表 42 直行超越行人間距與前後方性別之獨立 t 檢定 ... 67 表 43 偏向超越直行起始行人間距統計表 ... 68表 44 偏向超越直行後方行人性別與起始距離之獨立 t 檢定 ... 68 表 45 偏向超越直行前後性別分組之距離統計表 ... 69 表 46 偏向超越直行行人間距與前後方性別之獨立 t 檢定 ... 69 表 47 直行超越偏向起始行人間距統計表 ... 70 表 48 直行超越偏向後方行人性別與起始距離之獨立 t 檢定 ... 70 表 49 直行超越偏向前後性別分組之距離統計表 ... 71 表 50 直行超越偏向行人間距與前後方性別之獨立 t 檢定 ... 71 表 51 直行超越跟隨至超越時間統計表 ... 72 表 52 直行超越跟隨至超越時間與性別之獨立 t 檢定 ... 72 表 53 偏向超越直行跟隨至超越時間統計表 ... 73 表 54 偏向超越直行跟隨至超越時間與性別之獨立 t 檢定 ... 73 表 55 直行超越偏向跟隨至超越時間統計表 ... 74 表 56 直行超越偏向跟隨至超越時間與性別之獨立 t 檢定 ... 74 表 57 終止原因與跟隨時間同質性檢定表 ... 75 表 58 終止原因與跟隨時間受詴者間效應項的檢定 ANOVA 表 ... 76 表 59 LSD 法多重比較表 ... 76 表 60 直行超越後方速度模式變數相關分析表 ... 82 表 61 直行超越後方速度模式自變數逐步迴歸篩選表 ... 83 表 62 直行超越後方速度模式 ANOVA 表 ... 83 表 63 直行超越後方行人速度模式共線性診斷表 ... 84 表 64 直行超越後方行人速度模式係數表 ... 84 表 65 直行超越後方行人速度模式殘差統計量表 ... 85 表 66 偏向超越直行後方速度模式變數相關分析表 ... 87 表 67 偏向超越直行後方速度模式自變數逐步迴歸篩選表 ... 88 表 68 偏向超越直行後方速度模式 ANOVA 表 ... 88 表 69 偏向超越直行後方速度模式共線性診斷表 ... 89 表 70 偏向超越直行後方速度模式係數表 ... 89 表 71 偏向超越直行後方速度模式殘差統計量表 ... 90 表 72 直行超越偏向後方速度模式變數相關分析表 ... 93 表 73 直行超越偏向後方速度模式自變數輸入篩選表 ... 93 表 74 直行超越偏向後方速度模式 ANOVA 表 ... 94 表 75 直行超越偏向後方行人速度模式共線性診斷表 ... 94 表 76 直行超越偏向後方行人速度模式係數表 ... 94 表 77 直行超越偏向後方行人速度模式殘差統計量表 ... 95 表 78 超越移動行為模式整理 ... 98 表 79 行人超越移動模式比較表 ... 98 表 80 行人超越移動模式實證比較表 ... 99
1
第一章 緒論
1.1 研究背景與動機
在這交通與大眾運輸發達的社會,要搭乘運具前仍然需要使用人類與動物最 大差別的方式〝步行〞來到達接駁點,在搭乘運具後也是需要用步行的方式來移 動以到達最終的目的地。所以人類有大部分的時間都是使用步行的方式來移動, 即便到了現代,除了使用運具來達到且快速方便的大範圍移動之外,但要到達個 別所期望到達的地點時仍然需要憑藉著本身的雙腳來步行。我國的人口大多數比 例集中在各大都會區中,步行的方式仍係為一種最基本的方式,然而使用步行的 方式會讓行人設施產生可觀的衝擊。當然行人在步行時絕對不只是一種簡單的通 過性行為而已,行人所行走的空間也不能視為純粹的通過性地帶。在步行的過程 甚至可以引發各種人與人之間的互動與接觸,當然步行是一種最簡單、基礎、不 會增加環境污染的移動方式,人也可以藉由步行來構成一趟旅次,因此分析行人 行為特性係為一項值得研究的課題。 行人於步行過程中,大部分會有跟隨前方行於與超越前方行人等狀況產生。 而超越行人方面,個別會有要如何超越前方行人,該用何種方式超越前方行人, 在都市地區中,由於行人眾多而移動頻繁,都市中的交叉路口與人行道等會產生 許多交通問題也就是行人空間問題。探究其中問題可發現,行人空間問題主要是 因為行人步行,在行人穿越道、人行道、天橋、百貨公司進出口與大眾交通工具 進出口都會與行人步行者大量移動的問題。由於這些行人空間會提供了移動與停 留的可能,因為行人有種種不同的狀況,自然也會產生了順暢與擁擠等等情況。 在緊急下,擁擠是種危險的行為,為減少行人擁擠使得避難時減少意外產生,交 通管理與行人動線規劃顯得相當的重要。當擁擠時需如何改善問題,順暢時如何 繼續維持,除了加強控管與規劃行人動線外,更需對於行人移動的行為研究藉以 了解行人行為。 近年來,討論研究行人相關行為的研究眾多,大多數探討外在環境對於行人 間的影響,與其他因素間的相互探討,其中利用系統模擬的方式來分析並研究行 人的行為,已有相當的成果。不過在針對行人個體移動特性的討論並非深入探討, 由於行人間會有差異性的存在,研究大多探討於外在環境影響因素,利用系統模 擬的模式來分析、模擬行人的行為,在巨觀與微觀方面已有些許成果,但針對行 人本身移動行為特性的討論卻相當地缺乏。外在環境的影響與行人間所能夠接受 的情形,對於狀況的反應也不盡相同,人與人之間討論其個人不同的習慣與人的 處理事情方式,對於行人的行為會導致較無法預測的情況,若要以模式化行人行 為,難以透過簡單的數學模式解釋行人的行為,而使得模式過於複雜無法順利研 究。 有鑑於上述背景與動機,本研究將參考引用車流相關理論及行人移動行為之 相關文獻作為分析行人移動特性之依據,冀求出利用歸納分類建立行人超越橫移 行為模式,並判斷行人移動之影響參數,且探討行人移動之相關特性,以作為後 續研究與討論行人狀態之參考依據,並希望可以更進一步對行人行為做預測,以供更多資訊給相關單位做為行人設施的建設或改良參考。同時期望能為將來對於 行人的微觀研究提出一個新的方向與工具。
1.2 研究目的
本研究係探討超越前方行人的各種狀態行為之移動方式與特性探討,將對行 人行為相關特性進行分析,以及影響行人的因素,藉此瞭解行人在各種不同情況 下與人流特性之關係性,而建構微觀行人超越橫移模式。因此本研究之具體研究 目的如下: 1. 研析國內外都市行人行為與特性之相關文獻,將行人行為相關文獻與人 流理論等理論進行研析整理,再而蒐集整理行人行為資料,進而利用統 計分析,分析各種不同相關影響行人變數參數,以供建構行人行為模式。 2. 根據實地攝影調查與攝影調查結果分析調查各不同行人行為特性,並配 合統計方法,蒐集調查各種不同之影響變數,說明各種不同特性,再進 行歸納分析,以進一步分析分類提供構件行人超越橫移模式之參考。 3. 彙整調查人流資料與相關影響因素,根據實地調查行人之移動特性,應 用統計分析方法並結合資料統計分析結果,及影響行人移動行為選擇之 相關因素,進而發展行人超越行為之模式。 4. 本研究將分析行人行為與其結果並比較,將研究所得資料分析,並提出 對於未來微觀行人流與模擬模式之設計建議。1.3 研究範圍與對象
由於本研究係研究人行設施上行人之特性及行為,以行人為主,不包括汽車、 機車或腳踏車,主要觀察人行設施也就是行人穿越道上之行人,故將針對「行人」 進行研究,主要研究範圍在於行人通過具有專用時相號誌之行人穿越道時的超越 前方行人行為模式及其特性。應用實地攝影調查,取得交岔路口之行人樣本資料 後,再利用統計分析方法找出影響行人決策之因子,並進一步預測行人對於不同 情況其相對應的行為模式。行人穿越道路的過程是一連續性行為,行人會依據當 時不同的外在情況與內在心理因素的改變而連續不斷修正本身的行為,為因應此 隨機的過程,本研究將不探討行人穿越道路時行為改變的情況,只考慮在超越行 為發生後,且主要探討前方有行人之後方行人行為。 但由於研究經費與人力限制,研究地點將設置於商業區內行人流動量較高處 以方便資料收集,其餘地區之研究則希望將來可繼續進行,取得資料以研討並分 析各地行人之行為模式是否有差異。1.4 研究方法與流程
本研究從既有之國內外文獻回顧與評析,建立研究之架構,資料之蒐集乃至3 於行人的特性分析。本研究一流程進行各項研究工作,研究流程圖如圖 1,各項 研究工作說明如下所分述: 1. 確立研究方向與目的: 行人的行為仍未有個確定的模型可以完整表達行人的行為。因此, 本研究利用相關文獻、方法與行人調查而研析行人行為特性,進而以微 觀角度來構建行人的超越橫移模式,可供研究者及相關機構單位參考。 2. 文獻回顧與分析: 針對國內外在車流理論與人流理論於分析應用方法之相關文獻進行 回顧,為瞭解過去專家學者對於行人的研究以及行人行為之基本特性, 並對文獻資料作深入的研讀與評析,以期作為本研究理論基礎與研究方 法之參考依據。 3. 界定研究範圍與對象: 經由文獻的回顧與整理,加深對於相關理論的瞭解,進而深入探討 本研究之方向與目的,而能將研究範圍及研究的對象加以界定,由大範 圍的行人型態,研討一套能夠套用能將焦點將集中於個體行人的身上, 若能夠確認或則使得研究更深入更具價值。因此,本研究將以商業區人 行設施上之交叉路口行人穿越道為主要範圍,而以行人為對象。 4. 引用理論基礎與研究方法: 依文獻回顧整理後所得之理論與方法,選擇使用適當之理論基礎, 與相關應用分析研究方法,以做為從事研究、資料調查蒐集分析與模式 構建之依據。本研究將引用攝影調查法、統計檢定等,進行變數相關檢 定分析、建構模式與驗證。 5. 調查蒐集行人資料: 選定符合欲研究之人行設施後,在確認實驗錄影範圍後,進行實際 攝影調查,再將所蒐集人流相關資料系統化整理統計並製表,利用統計 分析與檢定方法加以驗證並於以歸類,以利於後續從事行人行為特性之 研析。 6. 建立國內都市商業區行人超越橫移行為模式: 利用搜集之行人流資料與相關文獻,將調查所得資料利用統計迴歸 分析與相關檢定,期望構建行人超越橫移模式。 7. 模式校估與驗證: 針對所構建之人流模式進行參數校估,並且蒐集符合研究範圍之新
樣本資料對模式進行驗證之工作,以檢視模式本身之預測準確性,利用 統計方法與相關性檢定來驗證其模式的正確度,並確認本研究計畫的結 果,更期待能夠符合行人流的狀況。 8. 結論與建議: 綜合本研究所獲得之人流特性,進而提出結論與建議,以期望未來 將可提供相關單位規劃改善人行設施與相關措施、控制策略之參考依據, 並冀望提供未來相關研究之參考,使國內對於行人流的研究、發展有更 近一步的成果。 本研究流程如圖 1 所示:
5 確定研究方向與目的 文獻回顧 界定研究範圍與對象 理論基礎與研究方法 研究資料蒐集 行人行為特性與影響 因素分析 攝影調查人流資料與 統計 模式校估 模式驗證 結論與建議 車流理論 人流理論 應用分析方法 構建微觀行人 超越橫移模式 是 否 圖 1 研究流程圖
1.5 研究架構
本研究之主要研究架構,首先針對國內外車流理論、超車原理、巨觀行人模 式、微觀行人模式等相關研究,進行回顧與整理,使對基礎行人流有所認知,探 究文獻內之理論及意涵,並瞭解目前學術於該議題上之發展情形。在模式構建方 面,以複迴歸分析方法進行模式構建。最後,針對構建之行人跟隨行為模式進行 驗證之工作,以檢視模式本身之預測準確率與適用性,本研究架構圖如圖 2 所 示: 行人流資料 調查 微觀人流 資料分析 影響行人行 為因素分析 構建行人超越 行為模式 模式驗證 否 行人行為 模式 是 模式校估 特性分析 錄影調查 偏向超越直 行行為 直行超越行 為 直行超越偏 向行為 越過前方行 人行為 本研究暫 不考慮 圖 2 研究架構圖7
第二章 文獻回顧
本章將對於本研究相關文獻進行回顧評析,先對於國內外有關行人行為特性 之研究進行回顧與整理,再針對有關環境設施與行人相關之研究做一整理,進而 回顧車輛的變換車道行為,以瞭解目前於行人流行為之研究方法、行人分析方式、 探討影響行人流之因素及相關研究所使用之研究方法與結果,以作為本研究理論 基礎與研究方法之參考依據。2.1 行人行為特性
交通模型的研究往往忽略的行人的因素,但是行人會對於交通狀況有所影響, 行人的行為有那些特性,以及那些因素會影響行人做出選擇,則少有相關研究, 大多數對於行人的研究分為兩類:影響行人的外在因素研究,與行人行為模擬分 析。因此本研究首先回顧一般影響行人行為之因素研究與人流理論,第二部分則 回顧現有電腦模擬行人模式。 2.1.1 影響行為因素觀測文獻Muhammad and Robert[31]對於行人的速度選擇模式進行分析,發現有一些 重要的參數會對行人選擇行為有很大的影響,其中像是速度、交通號誌、與旁人 可容忍的間距,以及 QKV 之間的關係圖。因為行人可以擁有很大的自由,像是 可選擇的路徑很多,受到的範圍限制也不大,甚至行走的方向、從何處開始行走、 要走那一邊,在在都顯示出行人選擇的自由度很高,同時也與行人本身遵守交通 規則的程度有關連。 Alexandra Wills[32]指出行人的個體偏好,如:速度、距離、位置,會被本 身的個性、現場的情況,以及外在的環境所影響,而且行人極可能會被社會力量 (與附近的行人)所影響而導致本身去選擇當時最理想的路程來到達目的地。並 在其研究中發現,年紀、性別、移動能力、團體大小、一天中不同時間,以及不 同地點,會對行人移動特性造成顯著的影響。該學者也說明,為了成為一個好的、 有價值的預測工具,模式的本身必頇要能模擬出現實的行為。 溫日宏[7]指出,行人步行行為具有下列特性: 1. 係靠雙腳進行位移,其移動速度皆較其他運具慢。 2. 肉體無法與剛性物體相抗衡,故需有行人保護設施。 3. 人體受體力限制,步行距離較短。 4. 行人特性複雜,行為難以預料。 5. 行人體力有限,不喜歡走上、下較高的坡度。 6. 行人交通屬短程移動,活動地點集中在較小地區。 7. 行人年齡會影響交通安全,小孩行走漫不經心,老年者則行動緩慢。 行人在步行過程中追求的是一舒適的感受(即不受阻礙、自由選擇行走速率 及方向),此涉及人的尺度、人體所佔的空間大小及人與人間的距離等因素。根 據Koichi Tonuma的觀念,人類以自身的軀體、感官、知覺所發展出來的一種與
自然界和諧相處的衡量系統,亦是一種心靈的及實體感知的價值系統。其中實體 感知方面,實際設計與評估屬於較容易量度的部分有四種尺度: 1. 以人軀體當作衡量的尺度,主要是人的坐、站立所佔有的空間,稱為軀 體尺度(body scale)。 2. 以人的步伐當作衡量的尺度,以東方人而言,大步伐約為 0.91 公尺, 小步伐約為 0.61 公尺。 3. 以人的感官之知覺距離作為衡量尺度,及利用人體的眼、耳、鼻等感官 所測得的資料。 4. 以人體的生存空間或生理時鐘當做衡量的尺度。 一個人站立所佔有的空間約為肩寬 60 公分、體厚 45 公分,與 Fruin[33]所提 出的橢圓形身體尺寸相近。當行人身體接觸時,每人約佔 0.3 平方公尺;而身體 不接觸時,每人則佔有 0.7 平方公尺;當行人欲從人行中穿越時,依其通行順利 與否,分別為 1.0 平方公尺與 1.3 平方公尺。 Hall[34]提到人與人的距離可以分為密接距離、個人距離、社會距離、公眾 距離(見表 1)。當行人行走時會與他人及周圍障礙物保持 30-45 公分的自衛距離, 因此步道寬度設計上必頇滿足人體空間與人與人保持的距離之基本條件。 表 1 Hall 之人與人空間距離特性 人與人距離 長度(m) 特性 密接距離 0.2 以下 人與人接觸,感觸對方熱氣 個人距離 0.7 ~ 1.2 伸手可處及對方 社會距離 1.2 ~ 3.7 伸手無法觸及對方 公眾距離 3.7 以上 行人危急,預防或避難所需空間 Teknomo[35]建構一微觀人流之模式,模式中每個行人都視為單獨且自主的 個體,可自由選擇路線與設施(參見圖 2),每位行人的範圍則設為一直徑 50-90cm 的圓,並有其起始位置、起始時間、起始速率,可隨機選擇做為輸入。系統中每 個行人都會受到兩種外力影響,一為同向前進的力,另一則為互斥力,當系統中 有二個以上之行人時,兩力中的同向力會與互斥力同時發生。一力會驅使行人前 進,而另一力則會與周遭的其它行人產生強大互斥,第一種互斥力表示行人間相 遇與超越追趕之行為。 單一人行道之一般模式如下: 2 max 2 ( ) ( ) ( ) ( ) ( ) ( ) 2 ( ) 2 1 ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) j i i i i j i k i j i j i p t p t d p t dp t e t p t r y t r m dt dt e t p t x p t p t p t p t p t p t <其中 y 代表其他行人侵入鄰近範圍之行為,r 則為行人之影響半徑。> 資料來源:Hall [34]
9 模式中等號右邊的第一部份表示向前推動,第二部份則為避免碰撞而向其他 方向移動,以保持兩靠近的行人間之距離,第三部份可保證無重疊的情況發生。 模式中的四個參數包括:m, α, β, χ,其中 m 是供當其他三個參數僅應用於個別的 力時,予以將三力結合一起。 圖 3 單向雙向人流示意圖[35]
Hoogendoorn, Bovy, Daamen[36]對於行人行為的過程分成三個等級,策劃 (Strategic)、戰術(Tactical)、運作(Operation)。在策劃的時期,行人會決定 要採取什麼樣的行為以及要不要採取這個行為;在第二階段,行人會根據上一階 段的策略做短期的決定,決定這個行為該從那裡做、路徑的選擇,並且可以回饋 給第一階段再重新策劃,是屬於雙向的溝通。第三階段則是選擇要走或是等,速 度或快或慢。根據這三個階段的作用決定行人為什麼選擇該時間的行為。該三階 段示意圖如下: Strategic Activity Set Choice
Tactical Activity Scheduling Activity Area Choice
Route Choice
Operational Walking
Waiting
Performing an activity Interaction with public transport
Inger and Gitte[37]於研究中以年紀與性別來研究行人行為特性,利用問卷調 查所得資料以卡方檢定來分析,發現老年人在穿越較寬的道路會比較困難,因為 他們需要更多的時間與注意力來對於各種方向的狀況進行掌握,所以年紀越大的 人其行為動作會越慢,反應時間較久,對交通有一定程度的影響。 行人速度是平均行人行走速度,一般以每秒多少公尺(m/s)為單位。行人步行 速率受許多因素影響,例如年齡、健康情形、障礙物之存在、交通設施之性質、 行人密度等。丁育群[8]指出行人於自然情形下,易受下列因素影響: 1. 環境條件:季節、時間、週遭環境(步道長度、寬度)... 2. 生理條件:性別、健康、年齡... 3. 服裝:行李、穿著... 4. 心理條件:旅次目的、環境對心理的影響... 另外,美國 HCM2000 指出行人行走速度與年長行人(65 歲以上)在所有行 人中佔有的比例有高度相關性。若其中 0~20%的行人為老年人,則在走道上平均 速度為 1.2(m/s);若老年人的比例超過 20%,則平均行走速度降為 1.0(m/s)。另 外,若走道坡度每增加 10%,平均行走速度將減少 0.1(m/s)。
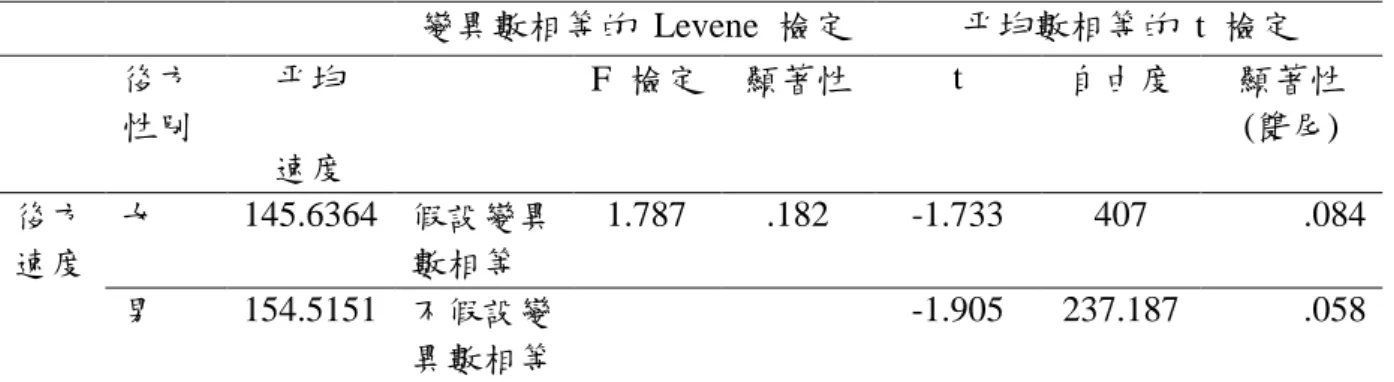
Hoogendoorn and Bovy[38]認為步行旅次與其他種類旅次存在很大的不同, 所以需要發展專用的理論基礎與模型工具來研究在步行設施上的行人行為。行人 在公共區域的移動自由幾近無限,也就是可供選擇的路線有無限多條,此時一般 網路模式將會較不適合應用於行人的路線選擇。應該利用以行為為基礎的模式會 較能符合現實情況。但是這個模式無法將行人的行為考慮進來,並假設行人會優 先考量本身的行程,以不耽誤為準。選擇過程中會被外部和內部因素所影響,外 在因素包括設施的設置、交通量、天氣、周邊環境等;內部因素則有行人本身的 特性像是性別、年紀、時間壓力、旅次目的等。 Yordphol Tanaboriboon[39]採用錄影調查方式,調查主要行人集中道路的人 行道、走道等設施,進行行人行走速率、流量及密度關係之研究。同樣採用 Greenshields 的速率與密度線性迴歸模式,求出流量與密度之關係式。作者在分 析過程中將行人以性別、年齡予以分群,發現男人較女人行走速率每分鐘快 10 公尺而年輕人較老人快 20 公尺。並將調查結果與西方國家比較發現,新加坡人 行走速率較西方人為慢但最大流量則較為高。
Gordon Simpson[40]嘗詴使用 Virtual Reality(虛擬實境)於研究行人道路穿 越行為的可行性,與探討不同年齡、性別的孩童對於穿越行為決策的依據。本研 究的行人道路穿越設計了兩種情境,一為車輛定速(但車輛間距離不同),另一 為車輛間定距離(但車速不同);實驗結果顯示,行人在車輛定速的情境下所表 現的不安全穿越次數較少,也就說明了行人通常以距離當作安全穿越的考量基準, 而未周詳的考量車輛速度。而 5~9 歲的孩童有最高的碰撞發生率,最低的則是 大於 19 歲的孩童;在不安全的穿越行為次數方面,女性的發生率略高於男性, 可能原因為男女對虛擬實境的反應具有差異性。
11 2.1.2 行為模擬分析文獻 行人的行為模式是一個很複雜的課題,都市交通規劃者對於行人在與其他人 步行的同時會有怎麼樣的影響、行人如何決定要不要穿越道路、如何決定本身的 速度,很有興趣,但是還沒有一個非常理想的方法可以完全解決這些問題。隨著 電腦科技的發達,模擬技術已經能夠將周遭環境的因子輸入模式中,並且模擬出 符合現實行人步行情景。一些比較常用的模型有:以二維座標將行人行為利用質 點或是圓形表現的模式、擁擠的行人移動以流體來呈現、應用細胞自動機 (Cellular Automata, CA)等模型。茲將現有模型應用於模擬行人的移動整理如 表 2:
表 2 應用行人模擬法簡表
提出學者 年代 模式名稱或特性
Helbing & Molnar 1995 利用社會力量模型將行人以二維空間中
的質點或圓圈表示其行為特性。 Werner & Helbing 2003
Seyfried et al. 2006
Henderson 1974 將行人擁擠的移動過程以流體的方式來
比喻及分析。
Helbing 1992
Hughes 2003
Brichall et al. 1994 PAXPORT 應用 CA 及
Agent-based 開發 之商用行人模擬程 式。
Maw & Dix 1990 PEDROUTE
Still 2000 LEGION
Kerridge et al. 2001 PEDFLOW
Daamen 2004 SIMPED
Teknomo 2006 MPSM
資料來源:本研究整理
Weng, Shen, Yuan, Fan[41]等人提出一行為基準模型可以適用在行進中的行
人,假設行人有三種基本行為:移動(Move),避免(Avoid),打旋(Swirl)如
下圖 4 所示。步行的方向決定於走路權重,利用基本行為與權重比率的乘積加總 而得。此模型可以模擬根據不斷更新的時間間隔所對應的行人速度來模擬行人的 移動。本模型是利用二維框架內之氣體模型來模擬行人流,當行人前進方向無障
避開,此時即為基本行為中的「避免」;當行人前進遇到反向前進的行人,或是 前方同向行人的速度較慢,為了避免碰撞,會選擇避開或是超越,此為基本行為 中的「打旋」。但是當行人遇到前方行人與自己有同樣速度與方向時,行人將選 擇排隊在後面而不會超越。而本模型行人之移動只有四個方向,根據上述假設, 行人的行為會以三大基本行為做加權,取四個方向中加權數值最大的,從而決定 下一個時間點移動的方向,當加權後對四各方向的數值為零,則行人不會移動。 圖 5 Move、Avoid、Swirl 示意圖[41] Armin[42]對行人流動提出一個修正的模擬模式保證不會發生預期速度為負 值的情況,並且行人的行為只會直接被前面一個行人的行為所影響。同時可以再 生出巨觀下正確的密度和速度,但卻不必然能夠正確地描述微觀的情形,並且也 發現到在平均速度下行人的空間需求比平均空間需求少許多,這個現象解釋為模 式的「短視」,也就是說行人不只有對前面的人立刻適應速度,同時也對更前面 的情形做適應。
D. Helbing, P. Molnar, F. Schweitzer[43]利用模擬找出行人於擁擠時的動態行 為,假設有一無形的社會力量會在行人與行人之間產生加速力與排斥力,透過錄 影來與模擬結果進行比較分析,發現行人之間會有一種自我組織的現象。Helbing & Molnar[44]認為行人的移動可以描述為有一社會力來推動,而這種社會力量不 是直接表現在行人的特質上而是要從行人之間互動行為之中量測而得。主要有三 種表現:加速至超越前方行人,與前方行人保持一固定距離,吸引效果的表現。 並成功利用模擬表現出行人於同向走道步行的行為,以及在一個狹窄走道上的行 為。下圖為模擬行人於走道上會產生同方向的自我組織行為。 圖 6 模擬行人自我組織圖[44] Kerridge et al.[45]因應對行人研究所需要的模擬工具,提出一個模擬行為微 觀行為的模型稱為 PEDFLOW,利用混合模擬方法,該模型將每個行人當成一個
13 代理,並可以自己決定下一步,這個界面是建立於 JAVA 平台,提供很良善的使 用界面,並且期望可以做為都市規劃者用來評估建設的工具,以改進都會區行人 步行環境。 鍾隆文[9]藉由視覺影像處理及二維向量分析的概念,探討行人偵測及行人 模擬的方法。行人偵測方面依偵測的目的不同有以下三種分別:基本偵測方法, 例如行人流量、速度、密度的偵測;輔助偵測方法,如行人趨勢、及行人頻率偵 測;面式偵測方法,如行人軌跡的偵測。行人模擬方面則因行人的行進方式傾向 面式二維的移動,無法以傳統車流模擬方法建立模擬系統,而為解決此困難,作 者則採用向量分析分別依無干擾行動模式、有設施的干擾行動模式、有行人的干 擾模式等三種形式建立二維行人模擬模式。而利用行人偵測所得的面式資料進行 二維模擬模式驗證,並利用個人電腦動畫表現行人模擬系統的成果。 Motoharu Hosoi[46]建立行人之動態模式,假設人之行為乃非隨機過程 (random process),有著相同的行為機制,只是隨著個人之不同有著不同的參數。 分別描述行人之趨避行為、跟隨行為、轉彎行為、靜止行為模式而進行模擬方法。 最後進行模擬行人於轉角與通道突然縮減的行人設施時之行為表現。 V.J. Blue[47]則以細胞自動機模式來說明行人的移動模式,作者的方法是將 行人的行走路徑模式分割為「跳」格子連貫動作,而在「跳」下一個格子的每一 步都會遵守遊戲規則(Rule Set),如選擇路線最短及避免與他人碰撞。這樣的 行人流模式已被廣泛應用於大的開放空間,如巴士場站、購物中心、辦公大廳等 具有衝突性干擾移動的高容量場所。細胞格狀體透過個別的行為規則提供了重現 個別行人詭譎多變的渾沌現象的可能性。藉由以極短時間片段(short-term time step)為一個階段,描述每個個體(entity)如同在西洋棋盤的平面空間中的格子 移動,而每個個體在移動下一步的格子時,因為個體與個體間有局部法則的規定 限制而具有邏輯的判斷如何去移動下一步的能力。因此可以根據每個個案的背景 及地點的幾何關係不同,清楚描述出個別行人與個別行人的行為與互動關係。而 根據這些局部法則讓每個模擬個體都像真正的行人一樣,可以隨性的變換行走速 率以及經常性的加減速。因此藉由 CA 模式可以模擬行人行走的情況。
Masakuni Muramatsu[48]以格子狀氣體模式(lattice gas model)模仿一左、 右對向人行流在通道上的行為表現,其中每個行走個體可以有向前、及左右等三 個方向的行進路線,而模型由自由流動的低密度狀態到行走停滯的高密度狀態, 觀察整個動態擁塞的發生之時間序列。發現當密度達到一臨界密度(Critical Density),行走速度發生劇烈的陡降,很快的速度即成為零,而空間佔有率 (Occupancy)也於同時陡昇至飽和。
2.2 人行空間
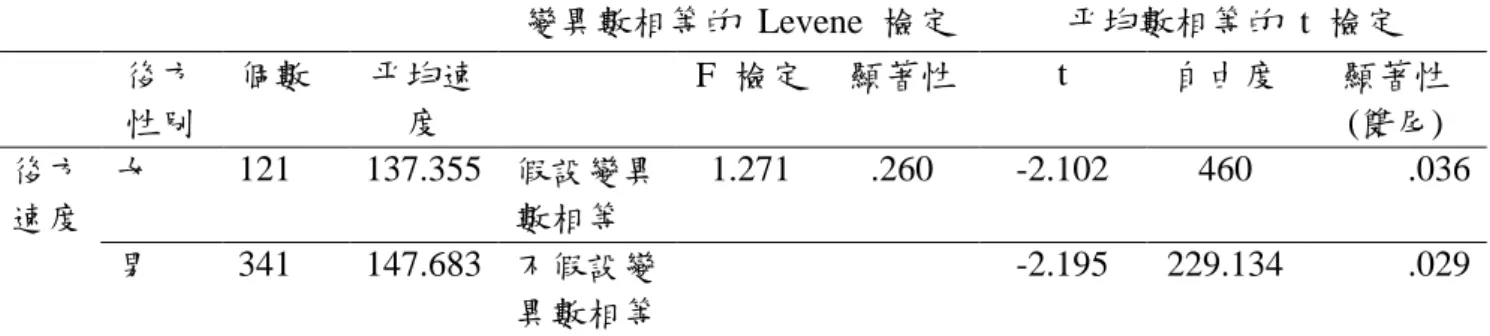
行人環境與場所是提供行人步行的空間及設施,本研究首先針對以往對人行 設施進行研究的文獻,以及研究捷運車站行走環境的文獻進行回顧。2.2.1 人行步道 本研究主要針對超越橫移行人行走設施進行研究,因此藉由相關對於人行步 道的研究加強對行人之瞭解。 黎韋利[1]以類似車流理論為基礎利用密度、速度、流量等易於量化指標, 界定人行道服務水準之方法,改變以行人主觀感受做為人行道服務水準評估之方 法。並引入模糊理論,藉以處理此具有質化性質之主觀判斷與模糊問題的衡量, 如此能有效且較為適切的描述,在處理方法上也較具有彈性與簡便,因此在衡量 行人本身主觀感受之服務水準滿意程度的問題中,提供一個可行的方向。經實例 驗證,以行人主觀感受為出發點之服務水準評估方法較傳統的評估方法更能真切 反應行人之主觀認知感受。 黃俊杰[2]探討都市人行道介面組成型態對於行人知覺之影響,透過問卷和 照片的訪談,調查台北市主要道路之戶外人行道空間介面型態與實質因子,以各 種情境模擬因子透過實驗設計分析行人的知覺是否有交互影響,並對整體行人偏 好提出預測模式。 林上閔[3]透過兩階段問卷調查方式,第一階段乃是以五等分態度量表萃取 受訪行人重視的步道屬性,第二階段則是採用敘述性偏好方法輔以照片說明屬性 值定義與步道類型方案來陳述步道情境,讓受訪者填答喜好程度及第一第二偏好, 再利用個體需求模式中的多項羅吉特模式與模糊修正模式來校估選擇模式。以探 討出都市商業區行人對步道類型選擇偏好。 Mehammed S. Tarawneh [27]現場調查顯示,位於約旦穿越斑馬線上的行人通 過速率與性別、年齡、人群大小、街道寬度有顯著之影響。調查得之平均行走速 率為 1.34 公尺/秒。 1. 性別:男性行走平均速率(1.35 公尺/秒)略高於女性(1.33 公尺/秒)。 2. 年齡:21 至 30 歲之平均行走速率最快(1.49 公尺/秒),超過 65 歲平均 行走速率最慢(1.17 公尺/秒)。 3. 人群大小:三人以上人群之行走速率慢於一個人或兩個人。 4. 街道寬度:行走在寬路幅的速率比窄路幅的速率快。 Abishai Polus [28] 以現場錄影觀測分析以色列商業區的人行道上之行人特 性,其中在 Solel Boneh 調查得男性平均速率為 1.28 公尺/秒,女性平均速率為 1.14 公尺/秒,且發現行走速率與密度呈現負斜率之直線關係,參數校估結果顯 示以三區段的直線迴歸關係式較為適合,並依此建立人流之服務水準可做為規劃 及設計參考。 李協政[4]選取台北市信義區商圈路口人行設施作為觀測地點,區分尖峰及 離峰時段行人,參考引用車流相關理論及行人移動行為之相關文獻作為分析行人 流動特性之依據。將行人行為細分為三類,超越前方行人、僅作橫向偏移與跟隨 前方行人,考慮前後行人速度差異、行人間距、前方總瞬時密度、性別與性別異 同等影響變因參數,構建判別函數與多項羅吉斯迴歸模式,用以解釋所觀察到之
15 行為表現。結果發現,性別變數無論尖峰或離峰時段均不會影響行人行為,而性 別異同變數僅在尖峰時段對於行人行為有顯著影響,且研究所構建之模式在判別 分類以及行為預測上均可達 85%以上之整體準確率。 2.2.2 捷運車站 許添本[5]選定捷運台北車站內聯外通道,於擁擠時刻調查行人流動特性。 調查方法乃是採用錄影調查法:使用錄影機將調查路段拍攝成錄影帶,配合 1/100 秒之計時器反覆觀察分析攝影畫面。錄影調查法的優點是可將調查現場畫面反覆 觀察,並且可經由畫面定格器仔細分析每一時刻之行人之特性;而缺點是攝影機 必頇放置於適當位置,並且觀測物體會因攝影機之俯仰角度、高度而有觀測的誤 差。 一般行人密度的量測乃是利用車流理論中 Q=K*V 的流量公式,經由觀測人 流的流量及速率而推導得密度,而作者考慮到捷運車站乃是人潮大量聚集的公共 場站必頇維持人行動線的安全性、流暢性及便利性,因此期望透過直接觀測密度 反映出行人流密度與流量的關係性。於是作者於捷運車站走道之參考線前後 0.5、 1、2 公尺範圍內進行密度直接量測方式,並利用 Green shields 的速率與密度線 性模式,最後推導出該走道單方向之流量。將此調查與各國資料進行比較,發現 我國捷運車站之行人流密度較高且速度較快,顯得我國搭乘捷運旅客較外國乘客 為急躁。 林廉凱[6]針對捷運車站通道動線干擾問題,以忠孝復興站走道為分析對象, 採用巨觀與微觀尺度建立面積法、帶寬法與刺激與反應等分析方法,並配合現場 觀測與錄影觀察方法進行分析,得到結果:乘客受到干擾後所採取的趨避方式主 要有二:改變行走方向及調整步伐速率,而當走道上密度較高時,「跟人行為」 較為明顯,而可適用於 Q=K*V 的流量公式;但當密度未達一定的水準時,跟人 行為並不明顯,且乘客與乘客的趨避行為可視為一連串的刺激與反應的調整適應 行為。 William H.K. Lam [29] [30] 依各場所如號誌化路口、輕軌車站(LRT)之交叉 路口、廣九鐵路(KCR)車站、捷運車站(MRT)等人行設施進行人行流特性蒐集與 分析。採用錄影蒐集法及現場計數方式調查,並對於行人進行提問。分析結果顯 示: 1. 行走距離:搭乘 KCR 車站乘客行走距離較 LRT 及 MRT 乘客為長。原 因乃是 KCR 車站為市郊與都市之鐵路運輸,服務站距較長。 2. 行走速率:行人在室外的行走速率明顯 e 高於室內。而在號誌化交叉路 口,行人紅燈穿越較在綠燈行走速率為快。
速率與密度之關係:在室內適合採用線性的Green shield’s model;室外則適
用Underwood’s model;交叉路口適用 Bell’s model;LRT 之交叉路口則適用 Underwood’s model。作者說明沒有一種單一模式可以適合所有人行設施,而必 頇更廣泛蒐集更多資料以建立完整的模式。
2.3 車輛變換車道方面
車流中變換車道情形係為一種轉換行向的,由於再後方車輛要改變原本行駛 車道藉由一偏向角度改變行向轉移至另一車道上,進而超越前方車輛。在觀察行 人後發現,行人亦有偏向角度使得轉換行使方向,本研究研究後方行人如何超越 前人,故針對車輛變換車道行為進行研究文獻與回顧。 2.3.1 行為門檻模式 傳統之刺激-反應方程式有兩項不合理的假設:(1)無論距離多遠,兩車都會 互相影響。(2)當相對速度不變,跟車反應亦不變。然而行為門檻模式[28]係認為 當跟車駕駛者感知到前車與自身之間距及相對速度差異過大時,會加速接近前車 以縮短間距,逐漸由不受影響駕駛範圍進入受影響駕駛範圍;當跟車駕駛者感知 到過於接近前車不安全時,則減速以加大間距;減速後之間距若不合跟車駕駛者 之期望則再加速,而若本車與前車距離太大時,後車則完全不受前車之影響。整 個系統就在本車不斷加減速的自我調整過程中達到穩定跟車狀態。此種駕駛行為 會表現出兩種的特有的跟車現象:(1) 跟車過程處於一微幅振盪調整之間距與速 差系統中;(2) 在各反應狀態下,具有如拋物線形之感知門檻界限,如圖 7 所示。 間隔 反應門檻 反應門檻 受影響駕駛 不受影響駕駛 (自由) dx +dv -dv 速度差異 間隔變大 速度差異 間隔變小 圖 7 同一車道前後車之相對運動過程示意圖Wiedemann(1974)[30]將此「心理—物理間距模式」(Psycho-Physical Spacing
Model)之觀念引進微觀車流模擬裡,構建數學化模式(INTAC Model),即為「行
為門檻模式」(Behavioural Threshold Model) ,亦可說是一種跟車決策模式 (Car-Following Decision Model)。模式基本假設仍為單一車道,不考慮變換車道 情形,將車流狀況分成三個反應區:感知反應區(Perceived Reaction)、無意識反 應區(Unconscious Reaction)、無反應區(No Reaction)。經過各感知門檻界限之區 隔後,可再細分為各決策行為分區,如圖 8 所示。
17 變大 變小 兩車間隔 撞車危險區 避禍煞車區 跟車 行駛區 按期望自由行駛區 前車車長 跟車間隔下限 跟車間隔上限 追近前車區 追近前車 之 反應門檻 DX SDX SDV CLDV BX AX OPD V +DV -DV 與前車總 (毛)間隔 MAXDX 圖 8 行為門檻關係圖 各行為門檻的意義如下: (1) 靜態間距(AX):本車在靜止狀態時,希望與前車所保持之車頭距 (2) 最小安全間距(BX):前後兩車為緊鄰跟車狀態,本車車速與前車車速 相近時,所欲維持之最小跟車間距。 (3) 感知速差門檻(SDV):在一較大間距下,跟車駕駛者對於速度差異(後 車車速-前車車速)之感知門檻,此門檻值越大,表示後車駕駛者越容 易受前車影響。 (4) 跟車間距上限(SDX):為顧及駕駛者判斷間距能力之差異,一般駕駛 者通常之跟車間距會在最小跟車間距至最小跟車間距的 1.5~2.5 倍之 範圍內。此最大值即為駕駛者的跟車間距上限。 (5) 間距漸減速差門檻(CLDV):在一較小間距、間距漸減且速差為正之 情況下,速度差異之門檻值,由 SDV 與隨機因子計算而得。 (6) 間距漸增速差門檻(OPDV):在一較小間距、間距漸增且速差為負之 情況下,速度差異之門檻值,其值約為 1~3 位 CLDV 值,此因駕駛 者通常對正在遠離物比正在接近物反應較遲緩之因。 2.3.2 安全間距距離觀念
利用 2.3.1 以刺激-反應理念構建之跟車模式如下[49][50],2.使用 GM 跟車 模式為基礎架構,有關安全距離的理論分述如下: 1. Pipes 和 Forbes 理論 Pipes(1953)首先將運動中車輛之間的關係公式化,其以安全距離的觀念來表 示後車的車速與前車間距離的關係,如下式所示。
1
1 10 1.47 n n n n X t d t L L 式中:
dn1 t:
後車與前車間距離 (呎) Ln:
車長 (呎)
Xn t 1:
後車在 t 時間之速度 (MPH) Pipes 假設每一位駕駛者與前行車輛維持的空間與後車的速度成比例且加上 一段距離。Pipes 理論的缺點為在低速與高速情況下會出現低估的現象,這與實 際不符。Forbes 在跟車模式行為中加入反應時間(Reaction Time),使後車用以判斷是 否該減速煞車,其認為前車之後緣與後車之前緣間的時間間隙(Time Gap)至少應 大於或等於反應時間,所以,最小的時間間距(Time Headway)的數學關係式等於 反應時間加上前車車長距離之行駛時間,如下式所示。
h t L X t n n min 式中: t:
反應時間(秒) Ln:車長(呎)
X tn :前車在 t 時間時之速度(MPH)由上式可知 Forbes 的跟車理論與 Pipes 模式類似,Pipes 考量的距離間與後 車的速度成線性遞增,而 Forbes 的最小安全距離間距與前車之速度成線性遞增。 2.安全間距模式 劉英標[10]以 GM 第五代跟車行為模式與汽車動能及煞車能量不變定律,並 考慮不同冒險度行為對跟車間距之影響,以構成一較完整之本土化跟車模式:
1 1 1 2 1 1 0 0 1 1 1 , 1 3 1 1 m l n l n n l m m C g A V l S V t t L m W f 式中:19 01 :冒險度權重
Vn1 t1 :後車車速 g:重力加速度 A:迎風表面積( m2 ) C:行駛阻力中風阻之常數項(Newton kph/ 2) W:車重 f :摩擦係數 Vn1:後車煞車前之瞬時速度 m::反應時間 Ln:車身長 :兩車煞停後之最小容許間距(約 1 米) l m, , ,l m:行為參數模式l m, , ,l m,經由實際測詴取得跟車資料,再以統計分析 校估得到在t=
1 時,
l m, =0.97749、m=0.193743、l=0.242990 李樑堅[11]利用攝影蒐集車輛於市區道路之車流資料,首先求得自由流狀態 推進之最低門檻距離(如式 2-10),用以判別車輛行駛在某一階段下是否會受到前 車之影響,並且利用統計迴歸分析方法以及動態安全間距,分別求得車輛推進之 加速度,取其較小值做為車輛推進之加速度。 d p( K1 )tV1 式中: d:代表動態最大安全門檻間距值 1 t V :本車之期望速度 P:前車之靜態車長 K:反應時間 2.3.3 變換車道之決策模式1. 變換車道門檻準則決策模式 張家祝等[12]認為車輛於高速公路符合下列五個條件便會採取變換車道: (1) 前後兩車車距小於最小跟車距離 (2) 本車車速大於前車車速 (3) 本車車速低於期望車速 85% (4) 鄰近車道之前車車速大於本車車速 3m/sec 或鄰近車道之前車與本車距離 大於最小跟車距離 (5) 本車變換車道後,鄰近車道之後車不致撞上 其中,最小跟車距離張家祝等是採用 B.b Greenshields 之經驗公式,其所得 之最小跟車距離比較符合張家祝等所調查之國內之最小跟車距離。 0.20955 6.4 m D V 式中: m D :最小跟車距離(公尺) V :後車車速(公里/小時) 黃國平[13]於市區快車道車輛變換車道之處理乃採用虛擬車法,因此車輛變 換車道時對前後所在車道相關車輛推進均產生影響,並且考慮車輛符合以下之原 則,便可選擇性變換車道: (1) 所在車道之前車速度較低,且兩車相距 30m 內 (2) 目前車速低於願望速度 5m/sec 以上 (3) 鄰車道車速大於前車 3m/sec 以上 (4) 所在位置至停止線範圍,鄰車道車輛數較少。 並且考慮本車與前車間距、變換至鄰車道後與鄰車道前車之車間距以及變換 至鄰車道後與鄰車道後車之車間距,其車間距假設呈對數常能分配,平均值為 2.268 秒,標準差為 0.402 秒。 李樑堅[11]判斷車輛於市區道路變換車道是否會成功,首先找出與處理 A 車 同車道與鄰近車道之前車 B、B,計算 A 與 B、B於 X 軸推進最遠的車輛偏 向角1、2,而1、2之值均頇小於 A 車最大偏向角,否則不得變換車道。若 A 車位於選擇變換車道區內,則該車為使其 X 軸推進距離最遠,故選擇1與2中 較大者為該車變換車道偏向角;若鄰近車道之後車 C 在 T 時刻不會超越 A 車在 T 時刻所在位置,則 A 車沿其變換車道之偏向角行進,當變換車道車輛在 Y 軸 與期望車道路線座標相吻合時,A 車變換車道行為即完成。其中最大偏向角乃採 用傅耀南[14]所提出之車速與偏向角之關係式。 黃泰林[15]於模式中採用不具冒險性行為的自由性變換車道需滿足以下條
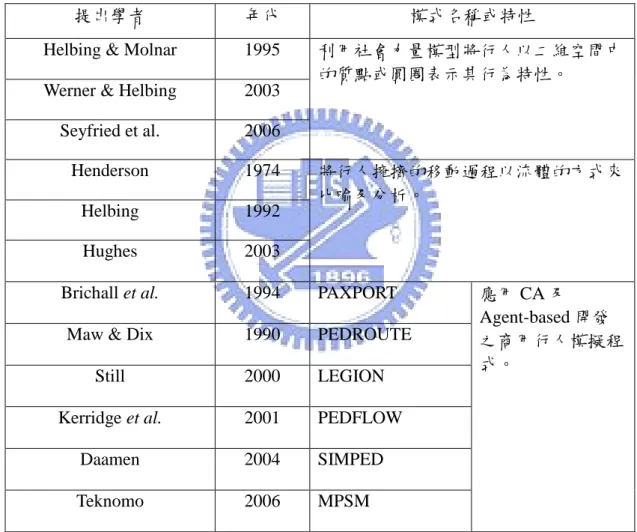
21 件: (1) 本車速度大於前車速度 3.5m/sec 以上 (2) 本車與前車距離小於 45 公尺以內 (3) 前車屬性因子不高於本車且期望速度低於本車 (4) 前車車速小於鄰車道上前方 20m 內之平均動態車速或該範圍內之平均 動態車速為 0 且無車 (5) 本車車速大於鄰車道上後方 15m 內之平均動態車速 (6) 該秒滿足佔位表格後,下一秒即能斜向推進,若不滿足則不佔位,且下 一秒重新判斷。 林鄉鎮[16]則參考黃泰林的方法,加以修正,其不具冒險性行為之自由性變 換車道所需滿足之條件如下: (1) 本車速度大於前車速度 3.5m/sec 以上 (2) 本車與前車距離小於 60 公尺以內 (3) 前車期望速度低於本車 陳柏榮[17]於模式中採用之變換車道條件為: (1) 與鄰車道前、後車均頇大於最小跟車距離。 (2) 與同車道前車之距離小於最小跟車距離,便不能加速 (3) 本車速度大於同車道之前車速度 (4) 目前速度小於期望速度之 85% (5) 符合可變換車道之機率 林宏達[18]在其智慧型跟車防撞控制系統中,使用 DSSS 雷達偵測鄰車道資 訊,當滿足下列以下四項條件時,即可變換車道: (1) 本車車速小於等於本車期望速度且大於等於同車道之前車車速。 (2) 本車車速大於鄰近車道後車車速,且本車與鄰近車道後車之縱向相對距 離大於縱向安全跟車距離。 (3) 鄰近車道前車車速大於本車車速,且本車與鄰近車道前車之縱向相對距 離大於縱向安全跟車距離。 (4) 本車與前車相對距離大於安全變換車道距離。 其中,安全變換車道距離的定義為:假設在一最壞的狀況下,當本車以加速 度 a 快速併入鄰車道時,前車正以最大減速度amax緊急煞車時,而本車不會碰 撞前車所應保持之距離。
圖 9 最差情況下座車避免碰撞前車之示意圖[18]
' 2 ' ' 1 1 max 1 0 3.6 2 s V V V V d AB S L t a a t L 式中: s d :安全變換車道距離 ' t :從變換車道開始到座車與前車不會發生碰撞的最小時間 AB:座車由t0至 ' t 所行進之距離 1 S :前車由t0至 ' t 所行進之距離 V :座車開始變換車道之速度 ' V :表示當座車進入變換車道模式時,前車的初始速度偵測值 V L :車長,定為 5m 2. 二元羅吉特模式 胡順章[19]利用二元羅吉特模式所建立之變換車道模式,: 0.87584 b 0.99851 ina 0.35703 nbna 0.011546 ia LC GAP V GAP D 式中: LC:決定變換車道之機率 b GAP:前車與本車之時間間距(秒)23 ina V :本車與鄰近車道後車之相對速度(公尺/秒) nbna GAP :鄰近車道前車與後車之時間間距(秒) ia D :後車車頭與本車車尾之距離(公尺) 由模式之預測率為 85.85%,並由模式中可得到以下四點結果: (1) 當鄰近車道前車與鄰近車道後車之車間距越大時,變換車道機率越大。 (2) 當本車與鄰近車道後車之相對速度越大時,變換車道機率越大。 (3) 前車與本車之時間間距越小時,變換車道機率越大。 (4) 本前與後車距離越小時,變換車道機率越大。 賴淑芳[20]亦證明二元羅吉特模式應用於車輛於高速公路匝道併入之預測 結果較普羅比模式及傳統臨界間距模式佳。 3. 應用虛擬實境(VR)及類神經網路 陳奕志[21]利用類神經網路來構建變換車道之決策模式,並且在資料蒐集上 考慮以虛擬實境(VR)之技術,來避免以拍攝攝影帶的方式蒐集變換車道行為資料 可能遭遇到的問題,並以本車車速、鄰車道前車車速、與鄰車道前車距離、本車 道前車車速、與本車道前車距離、鄰車道後車車速、與鄰車道後車之距離做為輸 入變數,其中本車與鄰車道後車距離及速度無法由虛擬實境求出,因此乃利用臨 界間距觀念,以變換車道不被鄰車道後車追撞為原則而自行產生,經由測詴得到 以雙層隱藏層構建類神經模式,預測變換車道的準確率高達 95.19﹪,比利用羅 吉特模式 86.51%還要高,由此可知類神經網路比羅吉特更能代表駕駛者變換車 道之行為。 魏建宏、林鄉鎮[22]同樣以虛擬實境之技術蒐集資料,並且利用倒傳遞網路 建構八種狀況下之變換車道模式,分別為:一般車流狀況下之變換車道行為、擁 塞下之變換車道行為、受測者前後 100 公尺以內至少有一車輛、受測者方 100 公 尺以內均無車輛、強迫性變換車道行為、選擇性變換車道行為、自由性變換車道 行為、不分類之所有資料。其考慮之變數與陳奕志類神經變換車道模式相同,其 結果得到所有模式中以受測者方 100 公尺以內均無車輛模式之均方差最低,但預 測力卻為最強,亦即倒傳遞網路較適用預測後方近距離無車之變換車道行為。擁 塞下之變換車道行為模式變異較少,因此預測能力較一般車流狀況下之變換車道 行為的預測能力好。 鐘炳煌[23]係以倒傳遞網路構建高速公路加速車道併入之行為模式,且仍採 用虛擬實境之技術蒐集資料,為了避免之前之 VR 技術無法取得鄰車道之後車相 關資料,鐘炳煌在駕駛模擬系統中加入中置及左側後視鏡,以求得鄰車道後車之 相關資料,使其模式更符合現況,其結果得到當駕駛者採取併入行為時,後車間 距過短出現的機率比前車間距高,除了顯示駕駛者對於本車與後車之掌控能力較 差,駕駛者亦有預期後車會有煞車之心理。而網路對於判斷併入之績效可達到 0.9730,而對於不併入之判斷亦提昇至 0.9200,顯示類神經網路能有效地整合進
口匝道所有交通道路資訊,透過隱藏層之運作,產生高可靠度之資訊來輔助駕駛 者。 4. 半間距模式 曹壽民[24]採用半間距觀念,構建強迫性變換車道行為模式,所謂半間距定 義為次車流車輛與主車流車輛通過交叉或併入區內特定參考點之時間間隔,該模 式以數學方式表示都市快速道路下匝道車變換車道之判斷準則如下式: R B A B R A d 匝道 參考點Y X 圖 10 下匝道車輛變換車道行為示意圖 tr ta ha tb tr hb 式中: r t :下匝道車輛 R 通過參考點 Y 之時點(秒) a t :平面道路前車 A 通過參考點 Y 之時點(秒) b t :平面道路前車 B 通過參考點 Y 之時點(秒) a h :下匝道車輛與前車所需保持之最小安全車頭距(headway 秒) b h :下匝道車輛與後車所需保持之最小安全車頭距(headway 秒) 其模式預測下匝道車輛是否變換車道之正確率為 89%較臨界間距模式高。 2.3.4 變換車道行為 黃國平[13]對於車輛於市區道路之前推進,採用平面二維座標處理方法,因 此必頇賦予前進中之車輛一最大可前進範圍與最大可偏向角度。在最大可偏向角 度乃是依照公路設計中計算車輛最小轉彎半徑計算式如下:
25 2 2 0 0 ( ) 127( ) V V R g f e f e 式中: R:轉彎半徑(公尺) g:重力加速度(9.81 公尺/秒平方) V:速度(公尺/秒) f:路面摩擦係數,當車輛行駛速度為 48KPH 時,值為 0.16 e:為超高 當求得車輛在不同速度下之最小轉彎半徑,再利用最小轉彎半徑求得車輛之 偏向角。 傅耀南[14]設定車輛無法以最大推進距離推進,且車速與願望速度相差 5m/sec 以上,此時相鄰車道之車速若大於現行車道速度,則考慮變換車道,且符 合路寬限制、前車限制、斜進角度小於最大偏向角及不影響後車前進四條件下, 計算最大斜進縱向距離,然後推進車輛。然而在最大偏向角方面,傅耀南使用美 國交通工程手冊的資料,以 LOTUS123 軟體求得車速與最大偏向角之關係式, 使在模擬時帶入車速,即可直接獲得偏向角。但此關係式指出車輛之最大偏向角 會隨著車速增加而遞減,故當車速過大時其求出之偏向角將會出現負值,李樑堅 [16]則為避免此現象發生,因而設定其偏向角最小值不可低於 0 10 。 s 0 . 3 6 1 7 4 8 0 . 0 2 9 2 5V 式中: s :汽車最大偏向角(弳度) V:速度(公尺/秒) 胡順章[19]利用調查高速公路實際變換車道行為微觀資料來探討,首先分析 變換車道行為之影響因素,發現車輛變換車道時之偏向角、加速度及減速度是變 換車道行為的主要因素,其中由資料統計可得知,車輛加速行為佔變換車道時間 平均約 59%,之後再以減速度方式繼續側移,直到完成變換車道。 在偏向角方面,胡順章利用多元迴歸求得如下式: 6 . 9 1 1 5 . 6 4 5 3Db Vi / 0 . 0 0 2 4 (Db2 ) ( 2 0.765 R )
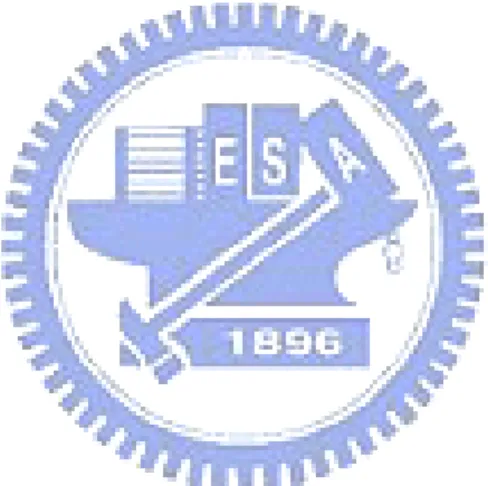
![圖 4 行為決策流程圖資料來源:Hoogendoorn, Bovy, Daamen[36]](https://thumb-ap.123doks.com/thumbv2/9libinfo/8714636.200181/20.892.243.693.225.449/圖4行為決策流程圖資料來源HoogendoornBovyDaamen36.webp)
![圖 9 最差情況下座車避免碰撞前車之示意圖[18] 1 ' ' 1 1 max ' 2 0 3.6 2sV VVVdAB SLtaatL 式中: d s :安全變換車道距離 t ' :從變換車道開始到座車與前車不會發生碰撞的最小時間 AB :座車由 t 0 至 t ' 所行進之距離 S 1 :前車由 t 0 至 t ' 所行進之距離 V :座車開始變換車道之速度 V '](https://thumb-ap.123doks.com/thumbv2/9libinfo/8714636.200181/33.892.165.729.149.336/最差情車道距離從變換車道開始到座車與前車不會發生碰撞的時間V.webp)