海流發電系統之單繞組式磁軸承穩態特性分析及高功因電力轉換器研製
蘇琨祥1、陳文寶1、郭見隆2 1.國立高雄應用科技大學 電機工程學系 2.國立高雄第一科技大學 系統資訊與控制研究所 E-mail : [email protected]摘 要
本文主要目的是以海流能量為動力來源之發電技術,旨在建立一動態海流發電系統架構,其中主要研究重 點在探討單繞組式磁軸承穩態特性,並且利用實驗設計之田口方法針對海流發電之磁軸承穩態特性作最佳化之 設計與分析,以適用於海流發電系統之磁軸承應用。最後,以海流發電技術為動力來源,讓海流發電系統的能 量有效率地轉為機械能並轉為電能,並使用電力轉換器加以輸出與分配。其中包含有功率因數校正電路與單相 全橋式換流器電路之系統架構,並利用數位控制與類比電路進行系統功能之實現。 關鍵詞:海流發電、數位控制、類比電路、田口方法、磁軸承穩態響應1. 前 言
近年來,隨著科技的蓬勃發展,人口的快速成長以及經濟的快速起飛,人類對於石油、天然氣、煤等石化 能源的依賴可說是密不可分,這也說明了能源的消耗日漸增加,相對地也造成了大自然生態環境的嚴重破壞。 因此再生能源(Renewable Energy)的研究已經是世界各國重要的研究目標,目前世界上較具發展潛力的再生能 源包括有太陽能(Solar Energy)、風力能(Wind Energy)、地熱能(Geothermal Energy)、海洋能(包含海水溫差、 波浪、潮汐及海流)和生質能(Biomass)等可再生能源[1-3]。 目前最被廣為利用與開發研究的就屬太陽能發電以及風力發電,但許多海洋國家也對於海流發電這塊充滿 興趣,特別是我國屬於四面環海的海島型國家,更是一個極具發展潛力的方向。目前世界上已有潮流發電廠、 潮汐發電廠、波浪發電廠以及溫差發電廠在試驗運轉中,相反地台灣由於過去觀測數據的不足及缺乏政策的支 持,導致台灣附近海洋能源之分佈評估及相關工作推動的窒礙難行;另一方面,海流能的技術仍屬於研發階段, 由於開發及利用成本過高也是重要的因素。海流發電一般可分為動態式與靜態式兩種,動態式係指利用海洋中 海流的流動力推動水輪機發電,台灣地區可供開發海流發電以黑潮流速強、流幅窄和厚度大而著稱。雖然目前 海流發電技術在台灣的應用相較於太陽能發電以及風力發電而言算是很少,或許對我國而言海流發電也是另外 一種能源發展的重點之一。 國際上對海流能源的利用及研發於數十年前開始[4-5]。除了早已成熟的潮汐發電技術外,其他新興之海洋 能源利用至今已發展出各式各樣的構想與設計,並在國外已有數種設計已成功開發,並通過測試,成為商業化 之產品。在此我們主要是利用高功率電子元件來實現能源轉換,目的是為了節約能源,並尋找可以提高效率的 方法來節省能源,而高頻率交換式電源供應器正符合需求。其主要是以功率半導體元件為核心結合控制系統、 電機機械與電子電路等相關,並將廣泛應用在工業、交通、商業、家電、通訊系統……等領域。另外,智慧型 電網(Smart Grid)也是極具發展潛力的,其兼具自動化及資訊化優勢、可自動執行自我監視、診斷與修復等功 能,並整合了發電、輸電及配電至用戶端,是最近十分熱門且先進國家紛紛有志一同而大力發展的智慧生活應 用項目之一[6-7]。2. 海流發電系統之單繞組式磁軸承穩態特性分析
為了探討海水流動的實際情況,本文將模擬一個實驗水槽,圖1 至圖 2 所示為 3-D 立體圖各視角俯視圖, 搭建水槽主要是以支撐木架、角鋼以及帆布來完成。本文模擬海水流動之造流機是利用一直流馬達轉動皮帶帶 動水渦輪機而產生海流能,且利用齒輪與鏈條耦合結構帶動發電機,垂直型扇葉因受到水流的作用而旋轉,經 由齒輪帶動發電機,如此便可完成水槽模擬實驗。在垂直型扇葉結構設計上,提出了六段變速齒輪鏈條結構, 此結構之優點為當海流水流量不大時,產生的力矩過小不足以帶動水輪機,此時須用小齒輪帶動發電機,反之, 當還海流水流量很大時則可使用大齒輪帶動發電機,如此發電機便可提供更大的轉軸輸入功率效益。因此一般 傳統的實現上採用變速齒輪將低速轉換為高速動力,再送至發電機來發電。由於海水密度遠比空氣要來得高約 835 倍,故其扇葉耦合效率比起風力發電機組要來得好,且海水密度大浮力佳,發電機結構體荷重係數可以比 較小。但是缺點是海水的金屬腐蝕性比較強,這是必需加以克服的問題。圖 1 模擬海流水槽前視圖 圖 2 模擬海流水槽等視角圖 本文中將採用永磁同步發電機作為發電系統,其規格表如表1 所示。發電機定、轉子構造如圖 3 及圖 4 所 示。 表1 發電機基本參數表 轉子外徑(半徑) 132.29 (mm) 定子齒數 36 轉子內徑(半徑) 114.15 (mm) 轉子極數 24 定子外徑(半徑) 113.65 (mm) 相數、槽數、極數 3、36、24 定子內徑(半徑) 87.65 (mm) 每極每相槽數 1/2 空氣隙 0.5 (mm) 匝數 90 定子鐵心長 37 (mm)
圖3 轉子實體結構圖 圖 4 定子實體結構圖
2.1 單繞組式磁軸承穩態特性分析
本文將探討一單繞組式磁軸承在海流發電系統上的模擬與分析,磁軸承系統靠著非接觸的電磁力與抵抗地 心引力,進而使垂直型扇葉懸浮於水中,垂直型扇葉藉由海流的流動而轉動時,藉由電磁力的控制並使垂直型 扇葉帶動發電機轉子轉動,而轉子之永久磁鐵產生的磁場將使得發電機定子線圈感應出一交流電壓,並且透過 轉換器的適當轉換,提供負載所需之能量。 本文將針對開迴路控制系統作一個簡單的模擬與分析,磁軸承本身就是一個不穩定且非線性的系統,當垂 直型扇葉轉動時,必須藉由控制迴路改變系統之電壓、電流,藉以控制磁懸浮力之大小,使得氣隙維持在一定 的範圍之內。傳統的控制方法是將摩擦力視為系統之外在干擾,再對系統動態方程式的操作平衡點予以局部線 性化;但在沒有摩擦力的完善模型下,當系統受到外在干擾時,就可能有不穩定的情況產生,並且在系統做定 位追蹤時,更可能產生較大的追蹤誤差。而利用磁軸承原理建構的系統,在工作時不會有非線性摩擦力的問題, 可用來取代傳統的機械式齒輪耦合方式;然而此磁軸承垂直型扇葉為了在短時間內氣隙達到穩態的要求,依據 系統模型來設計一開迴路控制器,用以克服系統未知的物理參數、系統負載變動與受外部干擾等問題,使垂直 型扇葉機構定位系統可以在短時間內達到穩態。本文探討單繞組式磁軸承應用於海流發電之垂直型扇葉的控制 系統上,如圖5 所示為本文所定義之單繞組式磁軸承機電設備。F φ x F 圖 5 本文所定義之單繞組式磁軸承機電設備 圖 6 電磁力作用示意圖
2.2 電磁線圈靜態特性分析
電磁線圈主要是在描述當線圈通以激磁電流時,線圈之電磁力的變化情形,也就是電流、位移與力量之關 係,其特性原理主要是由於內部磁場能量儲存的觀點而來。一般電磁能–機械能量轉換裝置,其磁路在固定不動和可移動之機械結構之間大部份皆存在著一空氣隙,而因為空氣隙之磁阻遠大於磁性材料的磁阻,使得大部份 之能量儲存發生於空氣隙當中,因此由空氣間隙的大小即可決定其磁路之性質。 電磁線圈就是利用磁場作為能量轉換之介質,並使電磁能轉換為機械能,輸出磁吸力並驅動可動鐵心作上 下運動之電磁能–機械能轉換裝置。電磁線圈就是利用這種原理使物體產生位移之目的。 首先,根據能量法原理,儲存於空間隙中之能量可表示成如式1 所示 0 ( , ) ( , ) i c f W i x =
∫
λ i x di (1) 其中 c W :能量[ ]J i:電流[ ]A x:空氣隙距離[ ] m f λ :磁通鏈(Flux linkage)[wb] 從圖6 中可得知,磁通鏈λ 可表示成式 2 f 2 2 0 ( , ) f N i A N i i x N x μ λ = φ= = ℜ (2) 其中 N:線圈匝數[匝] φ:磁通量[wb] ℜ:磁阻 0 1 ( H) ( x ) A μ = A :鐵心之截面積[m2] 0 μ :空氣導磁係數(H ) 4 107 m = π× − 將式2 代入式 1 中,可得儲存磁能相對於空氣隙x之關係式可表示為 2 2 0 0 0 ( ) ( , ) 2 i c N i A Ni A W i x di x x μ μ =∫
= (3) 欲求得儲存磁能所產生之電磁力大小 F 其表示式,故將式 3 對空氣隙x取偏微分(電流i
假設為常數), 即可將式4 表示為 2 0 constant 2 ( , ) ( ) ( , ) 2 c i W i x Ni A F i x x x μ = ∂ = = − ∂ (4) 從式 4 中可得知電磁力 F 相對於空氣隙x與激磁電流 之計算公式。式i 4 中其負號表示成電磁力F 作 用方向與一開始假設之空氣隙x方向相反。2.3 磁軸承控制線圈模擬與分析
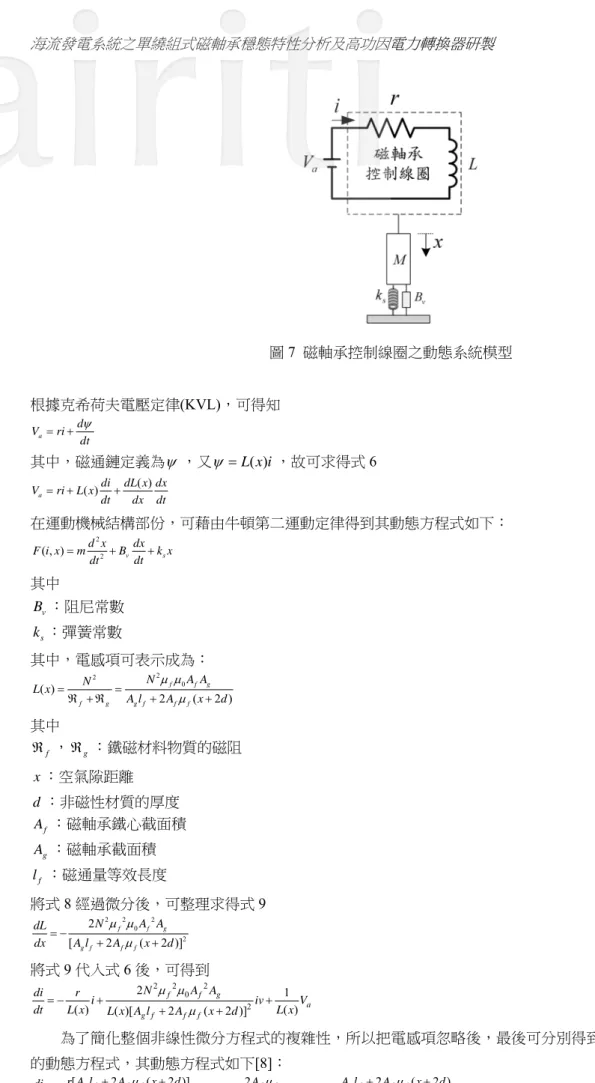
磁軸承控制線圈之輸出量是位移距離也是力量大小,其動態特性會有所不同。當表示成位移輸出時,有電 樞質量–彈簧運動所產生之慣性影響,且當運動所引起之磁通變化進而產生之反電動勢影響亦不可輕易忽略。當 作為力量輸出時,雖然沒有運動所造成磁通變化之影響,但控制線圈受到電壓信號驅動至建立輸出力量仍有一 段時間之延遲。 如圖 7 所示為一磁軸承控制線圈之動態系統簡化模型,主要是由電磁能量轉換部份與外部運動機構之結 合。線圈部份由導線內阻與電感所組成,其簡化之動態系統方程式表示如下:圖7 磁軸承控制線圈之動態系統模型 根據克希荷夫電壓定律(KVL),可得知 a d V ri dt ψ = + (5) 其中,磁通鏈定義為ψ ,又ψ =L x i( ) ,故可求得式6 ( ) ( ) a di dL x dx V ri L x dt dx dt = + + (6) 在運動機械結構部份,可藉由牛頓第二運動定律得到其動態方程式如下: 2 2 ( , ) d x vdx s F i x m B k x dt dt = + + (7) 其中 v B :阻尼常數 s k :彈簧常數 其中,電感項可表示成為: 2 2 0 ( ) 2 ( 2 f f g f g g f f f N A A N L x A l A x d μ μ μ = = ℜ + ℜ + + ) (8) 其中 f ℜ ,ℜg:鐵磁材料物質的磁阻 x:空氣隙距離 d:非磁性材質的厚度 f A :磁軸承鐵心截面積 g A :磁軸承截面積 f l :磁通量等效長度 將式8 經過微分後,可整理求得式 9 2 2 2 0 2 2 [ 2 ( 2 ) f f g g f f f N A A dL dx A l A x d μ μ μ = − + + ] (9) 將式9 代入式 6 後,可得到 2 2 2 0 2 2 1 ( ) ( )[ 2 ( 2 )] ( ) f f g a g f f f N A A di r i i dt L x L x A l A x d L x μ μ μ = − + + + + v V (10) 為了簡化整個非線性微分方程式的複雜性,所以把電感項忽略後,最後可分別得到三個非線性微分方程式 的動態方程式,其動態方程式如下[8]: 2 2 0 0 [ 2 ( 2 )] 2 2 ( 2 ) 2 ( 2 ) g f f f f f g f f f a g f f f f f g f f g r A l A x d A A l A x d di i iv dt N A A A l A x d N A A V μ μ μ μ μ μ μ μ + + + + = − + + + + (11)
dx v dt= (12) 2 2 2 0 2 2 1 [ 2 ( 2 )] f f g v s g f f f N A A B dv i k x dt m A l A x d m m μ μ μ = − + + − v (13)
2.4 磁軸承控制線圈動態方程式模擬
設 定 參 數Va =50V,r= Ω6 ,N=15000,μf =4000μ0 , , , , , , 7 0 4 10 H/m μ = π× − 0.0015m2 f A = 2 0.0003m g A = lf =0.25m d =0.0005m m=0.5kg,所模擬之狀態變數如圖8 至 10 所示。 current, i(A) 0 2 4 6 8 10 0 2 4 6 8 10 Time (seconds) 12 position, x(m) -0.005 0 0.005 0.01 0.015 0.02 0.025 0 2 4 6 8 10 Time (seconds) 12 圖8 模擬電流之狀態變數響應 圖 9 模擬距離之狀態變數響應 velocity, v(m/s) -0.005 0 0.005 0.01 0.015 0.02 0.025 0 2 4 6 8 10 1 Time (seconds) 2 圖10 模擬速度之狀態變數響應3. 田口品質工程
田口品質工程法,又簡稱田口方法(Taguchi Method)是由田口玄一博士(Dr. Grenichi Taguchi)所提出的一套品 管方法,其主要的工具是直交表實驗(Orthogonal Array Experiment)和信號雜音比(Signal to Noise Ratio,S/N ratio)。田口方法又稱為田口式品質工程(Quality Engineering),同時田口法也是目前在眾多最佳化設計中最被大 家所應用,主要應用於品質工程的改善,在各領域中之最佳化問題,亦都能獲得最佳的品質改善,且能提高生 產效率並降低成本以及縮短產品上市時間,因此被學術界及業界認定提升產品質最佳方法之一[9-10]。 3.1 參數設計 參數設計又稱為穩健設計(Robust Design),其主要目的是要決定產品或製程的參數設定值,使其對雜音變 數的敏感性最小,因此藉由參數設計,我們可以找到一組最佳參數水準組合,使得平均值與目標值一致,且變 異最小。
3.1.1 信號雜因比(Signal to Noise ratio,S/N 比)
(1)望大特性(Larger-The-Better) (i)品質特性是連續且非負值,範圍(0,∞)。 (ii)目標值為∞(或最大的可能值) (iii)沒有調整因數。 S/N 比可由式 14 求得: ⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ − =∑
= n i yi n 1 2 1 1 log 10η
(14) 其中,y
i為實驗數平均值。3.1.2 變異數分析(Analysis of Variance,ANOVA)
變異數分析的主要目的為應用統計檢定的方法來辨識個別因素之影響效果,並且利用貢獻度比來彌補田口 式實驗,無法研判各實驗參數對品質特性之影響能力及誤差程式等方面的缺陷。其基本公式如下(1) 總平方和(Total Sum of Squares):
∑
= − = n i i CF TSS 1 2 η (15) 其中,校正因數(Correction Factor)CF 為:(
)
N CF i 2∑
=η
(16) (2)變動:對於一因數 A,具有 P 水準,且每一水準有 m 個觀測值,那麼此因數的平方和為( ) ( )
( )
CF m A m A m A SS P A = + + + − 2 2 2 2 1 ... (17) (3)自由度 DF:為各因數的自由度等於其水準數減一;總自由度等於全體實驗的個數減一;誤差自由度為總 自由度減所有因數自由度之和。 (4)變異數:為因數的平方和除以其自由度,對於一因數 A 變異數定義為 A A A DF SS V = (18) 其中,SS A為A 因數的變動,DFA為A 因數的自由度。 (5)純變動:對於一因數 A 純變動定義為 eT A ADF
V
SS
SS
′
A=
−
×
(19) 其中,V
eT 為調合誤差的變異數。 (6)變異比:為因數的變異數除以其調合誤差的變異數,對於一因數 A 的變異比為 eT A AV
V
F
=
(20) (7)貢獻度:為各因數所佔變異數的百分比,對於一因數 A 的貢獻度定義為 100% A A T SS SS ρ = ′ × (21)3.2 磁軸承達到穩態之最短安定時間之田口方法分析
本章節主要是以單繞組式磁軸承之鐵心截面積Af 、磁軸承截面積Ag及磁通量等效長度lf 為物理基礎,並 且結合田口方法來進行單一目標之最佳化求解,以獲得磁軸承達到穩態之最短安定時間之設計目標。其中,安 定時間(steady-state time)可從圖 11 的暫態響應性能指標中得知。( ) y t max y steady state y − 0.9ysteady state−
0
Time(sec)t
steady-state time rise time 圖11 暫態響應性能指標 當電磁線圈產生電磁力,並使磁軸承達到穩態之最短安定時間,為了採用田口方法之望大設計,因此必須 將安定時間取倒數後即可求得其最大值,如式22 所示,可適用於望大演算法之設計,而田口方法的主要控制因 子如表2 所示。 steady-state 1 time i y = (22) 表2 主要控制因子 水準 因子 水準一 水準二 水準三 A. 截面積Af (m ) 2 0.0015 0.0065 0.0115 B. 截面積Ag (m )2 0.0003 0.0013 0.0023 C. 等效長度l (m)f 0.25 0.35 0.45其中,A 因子為磁軸承之鐵心截面積、B 因子為磁軸承截面積、C 因子為磁通量等效長度。藉由上述因子 設計過程中,分別進行九次田口實驗模擬量測。由於本文只使用三因子,其第四因子並未使用,不過剩餘三因 子仍具有直交性;故亦可選用
L
9為本實驗配置之直交表,而整個實驗配置與實驗結果如表3 所示。 表3 磁軸承達到穩態之 1/最短安定時間之模擬結果配置 實驗值y
平均值 平均平方差 信號雜音比 L9 A B C 1 2 3y
MSDη
1 1 1 1 0.1827 0.1864 0.1871 0.1854 29.1020 -14.6392 2 1 2 2 0.2347 0.2596 0.1915 0.2286 20.0871 -13.0292 3 1 3 3 0.3733 0.3659 0.2541 0.3311 10.0444 -10.0192 4 2 1 2 0.1350 0.1538 0.1365 0.1418 50.2718 -17.01325 2 2 3 0.1868 0.1804 0.1838 0.1837 29.6622 -14.7220 6 2 3 1 0.1857 0.1874 0.1540 0.1757 33.2130 -15.2131 7 3 1 3 0.1514 0.1330 0.1368 0.1404 51.1979 -17.0925 8 3 2 1 0.1443 0.1375 0.1092 0.1303 61.5925 -17.8953 9 3 3 2 0.1593 0.1557 0.1094 0.1415 54.7367 -17.3828 由式23 至式 31 可得如表 4 所示之回應表
(
1 2 3)
1 3 1 A = η +η +η (23)(
4 5 6)
2 3 1 A = η +η +η (24)(
7 8 9)
3 3 1 A =η
+η
+η
(25)(
1 4 7)
1 3 1 B = η +η +η (26)(
2 5 8)
2 3 1 B = η +η +η (27)(
3 6 9)
3 3 1 B =η
+η
+η
(28)(
1 6 8)
1 3 1 C =η
+η
+η
(29)(
2 4 9)
2 3 1 C =η
+η
+η
(30)(
3 5 7)
3 3 1 C =η
+η
+η
(31) 表4 磁軸承達到穩態之 1/最短安定時間之模擬結果回應表 因子 水準 A B C 1 -12.5625 -16.2483 -15.9159 2 -15.6495 -15.2155 -15.8084 3 -17.4569 -14.2050 -13.9446 Max-Min 4.8943 2.0433 1.9713 根據表4 可畫出其回應圖,如圖 12 所示。圖12 磁軸承達到穩態之 1/最短安定時間之回應圖 由各因子之 S/N 比回應表可得知三因子之最佳組合為其中一組,進行變異數分析,其分析結果如表 5 所示, 其中 為誤差,
e
e
T為誤差調和;即忽略因子之和,T
為總和。將最佳控制因子S/N 比與直交表 9 組實驗之平均 S/N 比由下式計算可得最佳 S/N 比值。(
A1 B3 C3)
2 optimal avg η = η +η +η − ×η (32) ( 12.5625 14.2050 13.9446) 2 15.2230 10.2661 optimal η = − − − − × − = − 其中 ( 14.6392 13.0292 10.0192 17.0132 14.7220 15.2131 17.0925 17.8953 17.3828) / 9 15.2230 avg η = − − − − − − − − − = − 表5 磁軸承達到穩態之 1/最短安定時間之變異數分析 因子 變動S
自由度DF 變異VA
純變動SS' 變異比VR
貢獻度ρ
A 36.75 2 18.3751 36.750 60.68033 72.0734 B 6.2629 2 3.1314 6.263 10.34101 12.2826 C 7.3712 2 3.6856 7.371 12.17102 14.4562 e 0.6056 2 0.3028 0.606 - 1.187756159 T e - 0 - - - 0 T 50.99 8 - 50.384 - 100.0000 最後根據回應圖可得到之最佳組合為 。由於最佳組合在直交表裡,因此不必在作確認實驗,以確定 此組合是否為最佳。 1 3 3 A B C 最後以磁軸承之鐵心截面積Af 為0.0015m2、磁軸承截面積Ag 為0.0023m2與磁鐵之磁通量等效長度lf 為 ,得到磁軸承達到穩態之最短安定時間取倒數後為0.3733、0.3659 與 0.2541 將這三筆資料取平均值後可 得到0.3311,且由於此最大值為安定時間之倒數,因此經過在取倒數後即可得到最短安定時間之平均值為 3.0202 秒。 0.45m4. 系統硬體轉換器電路架構
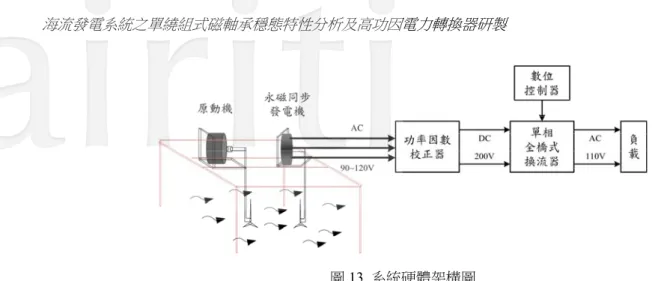
本文所使用之硬體電路架構主要分為功率因數校正電路與單相全橋式換流器電路。如圖13 所示為本文所使 用之系統硬體電路架構圖,圖中我們將海流發電機的電壓饋入功率因數校正電路,最後在經過單相全橋式換流 器供給交流負載使用。圖13 系統硬體架構圖
4.1 功率因數校正之定義
本文中,我們將先定義功率因數(Power Factor,PF)、總諧波失真(Total Harmonic Distortion,THD),電力 系統供電時,當負載為電容性或電感性時,會使得輸入電流產生相位移而造成功率因數的低落;且功率因數不 再是單純的電壓與電流的相位差問題,這更會使得電源輸入電流波形產生畸變,亦會產生嚴重之諧波干擾。一 般而言,切換式電源供應器如果未加入功率因數校正電路,其輸入電源側之功率因數大約只有0.5~0.6,且輸入 電流之THD 可能超過 100%以上,嚴重的電流畸變更會增加電力系統的負擔及效率低落,其諧波失真更造成電 力品質的下降。而本文將針對主動式功率因數校正技術進行近一步的探討,包括有功率因數校正技術的研究及 功率因數校正硬體電路的實作[11-12]。 早期的用戶使用端大多為線性負載,因此輸入電壓與輸入電流波形只存在相位差的問題,只有相位移因數 會影響功率因數的大小。線性負載一般可分為電阻性、電容性及電感性三種。對以上兩種負載而言,輸入功率 可表示成式33。但目前隨著技術的迅速發展,電子產品大多為非線性負載,功率因數不再是單純的輸入電壓輸 入與電流相位差的問題,另外還要考慮到畸變因數。 in rms rms P =V I cosθ (33) 其中,Pin為輸入功率,Vrms為輸入電壓之有效值,Irms為輸入電流之有效值,θ 為電抗元件造成的超前或 落後的相位角。
4.2 功率因數校正之原理
對於一般的單相電源系統而言,功率因數定義為輸出所消耗的實功率(Real Power,P)與視在功率 (Apparent Power,S)之比值,其數學式如式 34 所示。 1( ) ( ) rms s rms I P PF c S I osθ = = (34) 其中, ( ) ( ) 1 rms s rms II 為畸變因數(Distortion Factor),cosθ 為相移因數,當畸變因數與相移因數皆為 1 時,功
率因數 PF=1,對於畸變的輸入電流所產生之諧波之失真度以及扭曲程度稱為總諧波失真,THD 為非基本波有 效值之均方根與基本波之有效值之比,因此THD 定義為: ( ) ( ) ( ) 2 2 1 1 s rms rms rms I I THD I − = (35) 另外THD 又常以失真率表示,故其總諧波失真率為:
( ) ( ) ( ) 2 2 1 1 % s rms rms 100% rms I I THD I − = × (36) 又可得 2 1 cos 1 PF THD θ = + (37) 因此由式37 可得知影響功率因數的主要原因有:1.畸變因數,主要由I1(rms)與Is rms( )的比值來決定。2.相移 因數,主要由輸入電壓及輸入電流的相角差cosθ 來決定。
4.3 功率因數校正 IC 簡介
ICE2PCS02 是一個 8PIN 的功因校正晶片,為英飛凌公司所推出的功率因數校正之控制 IC[13],該製程最重 要是在於等效模型輸入是以電壓訊號為主,而輸出則是經由轉導變成電流訊號,如此在其補償電路只需由輸出 端加裝元件後直接接地即可達到補償效果。另外在此IC 內部完全看不到乘法器,它是以非線性增益電路取代了 乘法器的作用,也大大減少了外部周邊電路的零件數量,因此ICE2PCS02 僅有八隻接腳。英飛凌公司在該晶片 中增強了動態響應性能,只要輸出電壓變化超過±5%,晶片就會跳過慢補償運算放大器而直接啟用非線性增益 模組,有效改變工作週期。這樣輸出電壓就可以在短時間內恢復。
4.3.1 ICE2PCS02 的主要特點
(1). 擁有寬廣的輸入電壓範圍。 (2). 有較佳的動態響應性能。 (3). 採用平均電流控制模式、可降低電感電流漣波及 EMI。 (4). 具有輸入欠電壓保護、輸出過電壓保護及開迴路保護等。 (5). 提供限制啟動電流的軟啟動功能。 (6). 只需要較少的外部周邊控制元件。 (7). 最大工作責任週期可達到 95%。 (8). 提供內部固定的切換頻率 65kHz±
5%。4.4 單相全橋式換流器
單相全橋式換流器是將一直流電壓轉換成所需之交流輸出電壓及頻率,可稱為變流器(Inverter),又可稱為 直流-交流轉換器(DC/AC Converters)[14]。如圖 14 所示,其動作原理是利用功率開關元件的切換來完成,其 廣泛利用在交流馬達驅動與不斷電電源供應器(UPS)的應用場合。 圖14 單相全橋式換流器電路4.5 硬體電路實驗結果分析與討論
4.5.1 功率因數校正電路負載測試
功率因數校正電路主要包含橋式整流器、升壓式轉換器與ICE2PCS02 之週邊控制電路,此 IC 主要是由內 部之電流控制迴路產生追隨全波整流電壓訊號之電流訊號並和內部之電壓控制迴路來控制非線性增益電路所產 生的三角波訊號作比較,進而控制脈波寬度調變,來達到功率因數校正的目的。實驗的規劃,主要是透過海流 發電系統所產生出來的電壓,變動負載功率,觀察功率因數校正後的情形,量測在負載為 400 狀況下的交流 側輸入電壓 、交流側輸入電流 Ω ac V Iac、直流側輸出電壓Vdc、直流側輸出電流Idc、快速傅立葉轉換(Fast FourierTransform,FFT)以及總諧波失真率(Total Harmonic Distortion,THD)。
圖15 所示為功率因數校正前之Vac、Iac波形,圖16 所示為功率因數校正後之Vac、Iac波形,圖17 所示為 功率因數校正後之Vdc、Idc波 ,圖18 所示為功率因數校正前之 FFT 波形,圖 19 所示為功率因數校正後之 FFT 波形,圖20 所示為功率因數校正前之諧波頻譜圖,圖 21 所示為功率因數校正後之諧波頻譜圖。其中,功率因 數校正前之 ac 形 I 波形,已經扭曲變形導致功率因數大幅降低,且由FFT 及諧波頻譜圖可以明顯的看出電流 60Hz 基本波以及奇次諧波dB 值。當經過功率因數校正後之Iac波形已經與電壓波形幾乎相互重疊,功率因數也大幅 提高許多,而從FFT 及諧波頻譜圖中也可明顯看出經過功率因數校正電路後,奇次諧波也大幅的降低,另外, 我們可由表6 與表 7 中看出經過功率因數校正電路後,不管是功率因數或是總諧波失真量都比起未校正前來的 優異。 -10 -8 -6 -4 -2 0 2 4 6 8 10 0 1.6 3.2 4.8 6.4 8 9.6 Time(S) *10-2 C u rr en t( A ) -250 -200 -150 -100 -50 0 50 100 150 200 250 Vol tag e( V) 電流 電 壓
-3 -2 -1 0 1 2 3 0.0 1.6 3.2 4.8 6.4 8.0 9.6 Time(S) *10-2 Cur re nt (A) -250 -200 -150 -100 -50 0 50 100 150 200 250 Vo lt a g e( V ) 電 流 電 壓 圖15 負載測試(400Ω)功率因數校正前Vac、Iac波形 圖 16 負載測試(400Ω )功率因數校正後Vac、Iac波形 0 0.5 1 1.5 2 2.5 3 0 1.6 3.2 4.8 6.4 8 9.6 Time(S) *10-2 C u rr en t( A ) 0 50 100 150 200 250 Vo lt a g e( V) 電流 電壓
-80 -70 -60 -50 -40 -30 -20 -10 0 0 100 200 300 400 500 600 700 800 900 1000 Frequency(Hz) Ia c( d B ) 圖17 負載測試(400Ω)功率因數校正後Vdc、Idc波形 圖 18 負載測試(400Ω )功率因數校正前 FFT 波形
-80 -70 -60 -50 -40 -30 -20 -10 0 0 100 200 300 400 500 600 700 800 900 1000 Frequency(Hz) Ia c(d B )
0 20 40 60 80 100 (%) 1 3 5 7 9 11 13 15 17 19 Odd Harmonics 圖 19 負載測試(400Ω)功率因數校正後 FFT 波形 圖 20 負載測試(400Ω )功率因數校正前之諧波頻譜圖 0 20 40 60 80 100 (%) 1 3 5 7 9 11 13 15 17 19 Odd Harmonics 圖21 負載測試(400Ω )功率因數校正後之諧波頻譜圖 表6 功率因數校正前後比較表 負載( )Ω VAC(V) IAC(A) VDC(V) IDC(A) PF 效率(%) 校正前 400 115 2.86 159 0.43 0.412 50.45 校正後 400 115 0.93 204 0.48 0.988 92.67 表7 總諧波失真校正前後比較表 負載( )Ω THD(%) H3(%) H5(%) H7(%) H9(%) 校正前 400 146 90.98 76.46 59.97 43.51 校正後 400 4.31 1.21 1.62 0.93 1.76
4.5.2 單相全橋式換流器電路負載測試
此電路主要是將功率因數校正電路之輸出電壓,饋入單相全橋式換流器電路,而正弦脈波寬度調變的切換 方式採用單極性的正弦脈波寬度調變,如圖22 所示為其閘極驅動訊號,由於本文採用全橋式架構,為了避免上、 下臂功率開關元件短路的問題,故必須加入空白時間(Dead Time),本文採用 2 sμ 。如圖23 為經過二階 LC 濾波 器後的輸出波形。圖24 為功率因數校正後之交流輸入電壓與電流波形,當分別變動負載電風扇強、中、弱三檔 時可得負載交流輸出電壓與電流波形,其中電風扇強檔時為圖25 所示,其內阻抗(Z)定為 60Hz 時分別為檔位強檔306.82 21.6∠ o ( )Ω 、中檔405 0∠ o( )Ω 與弱檔450 0∠ o( )Ω 。 0.0 1.0 2.0 3.0 4.0 5 Time(S) *10-4 .0 Q1 Q4 Q3 Q2
-250 -200 -150 -100 -50 0 50 100 150 200 250 0 1 2 3 4 5 6 7 8 9 10 Time(S) *10-2 V o ltage(V ) 電 壓 圖 22 正弦脈波寬度調變閘極驅動訊號 圖 23 單極性正弦脈波寬度調變濾波後輸出波形 -3 -2 -1 0 1 2 3 0 1.6 3.2 4.8 6.4 8 9.6 Time(S) *10-2 C u rr en t( A ) -250 -200 -150 -100 -50 0 50 100 150 200 250 Vol tage (V ) 電 流 電壓
-3 -2 -1 0 1 2 3 0 1.6 3.2 4.8 6.4 8 9.6 Time(S) *10-2 C u rren t( A ) -250 -200 -150 -100 -50 0 50 100 150 200 250 Vol tage (V ) 電流 電壓 圖 24 電風扇強檔時輸入電壓與電流波形 圖 25 電風扇強檔時輸出電壓與電流波形
5. 結 論
本文對於海流發電系統之單繞組式磁軸承達到穩態之最短安定時間進行田口方法分析,並且針對影響磁軸 承達到穩態之最短安定時間的因子進行討論。最後,利用海流發電系統發電機所發出來的電量利用高功因電力 轉換器電路,最後在經過單相全橋式換流器供給交流負載使用。經由水槽之實驗,的確驗證了海流發電的可行 性,並且歸納出以下幾點: 1. 本文針對海流發電系統之磁軸承穩態作最佳化參數設計進行分析,利用實驗設計之田口方法,可以得知我 們選定的控制因子的貢獻度及迴歸模型所分析出來的曲率大小,最後利用最佳化數學規劃法求出其最佳 解,彼此互相都不會有矛盾的現象發生,並且可以預測到磁軸承達到穩態之最短安定時間的最佳解。 2. 本文主要利用鋼架、渦輪扇葉、原動機、發電機、齒輪、皮帶等等器材,架設實驗所需要的海流發電系統, 並且成功地模擬出實際海流的情形。 3. 本文利用功率因數校正電路的硬體實作,由實驗結果可得知經過校正後之功率因數可達0.98 以上,並且當 輸入電壓變動時仍然可以保持系統功率因數值的穩定及輸出電壓穩壓的效果,並且總諧波失真 THD 降為 10%以下。參考文獻
[1] Jones, A. T. and Westwood, A., “Recent progress in offshore renewable energy technology development,” IEEE on Power Engineering Society General Meeting, Vol. 2, pp. 2017-2022, June 2005.
[2] Arai, J., Iba, K., Funabashi, T., Nakanishi, Y., Koyanagi, K. and Yokoyama, R., “Power electronics and its applications to renewable energy in Japan,” IEEE Circuits and Systems Magazine, Vol. 8, No. 3, pp. 52-56, Third Quarter 2008.
[3] Oman, H., “Magnetic braking of the Earth's rotation,” IEEE Aerospace and Electronic Syatem Magazine, Vol. 4, No. 4, pp. 3-10, April 1989.
[4] Chen, J. Y. and Nayar, C. V., “A direct-coupled, wind-driven permanent magnet generator," IEEE Conference on Energy Management and Power Delivery, Vol. 2, pp. 542-547, 1998.
[5] World Energy Council, http://www.worldenergy.org.
[6] 經濟部技術處 產業技術知識服務計畫(ITIS), http://www.itis.org.tw/index.jsp [7] Ntelligent Living Space, http://www.ils.org.tw/intelligent/
[8] Dr. Victor Giurgiutiu and Sergey Edward Lyshevski, Micromechatronics Modeling, Analysis, and Design with MATLAB, 2004.
[9] Barker, Quality Engineering by Design: Taguchi’s Philosophy, Quality Progress, T.B., 1986. [10] 葉怡成,實驗計劃法-製程與產品最佳化,五南,台北,2001。
[11] Liu, P., Meng, Y., Kang, Y., Zhang, H. and Chen, J., “Analysis of single-phase boost power factor correction (PFC) converter, " IEEE on Power Electronics and Drive Systems, Vol. 2, pp. 933-937, July. 1999.
[12] Gallo, C.A., Morais, A. S., Tofoli, F. L., Coelho, E. A. A., De Freitas, L. C., Farias, V. J. and Vieira, J. B., “A high power factor symmetrical switched-mode power supply," IEEE on Applied Power Electronics Conference and Exposition, Vol. 2, pp. 756-759, 2004.
[13] Datasheet of ICE2PCS02, “Standalone Power Factor Correction Controller in Continuous Conduction Mode,” Infineon, Feb. 2007.
[14] Wu, T. S., Bellar, M. D., Tchamdjou, A., Mahdavi, J. and Ehsani, M., “A review of soft-switched DC-AC converters,"IEEE on Industry Applications Conference, Vol. 2, pp. 1133-1144, Oct. 1996.