I-Shou University Institutional Repository:Item 987654321/11329
76
0
0
全文
(2)
(3) 陣列訊號處理系統之模擬與分析 研究生:王皓緯. 指導教授:陳昭宏. 義守大學電子工程研究所. 摘要 使用 MATLAB/SIMULINK 建立被動的陣列訊號處理之程式庫。模擬環境以水中 場景為主。能容易的建構水下之複雜場景的模擬平台,如:水中多目標物、多陣列之 複雜情境。首先對水中環境之陣列訊號處理作規劃而找出所需建立模組,接著分別找 出模組內之各個變因而建立模組,再將所有模組和元件建構到函式庫內,而在本文函 式庫中內分別建立 MUSIC 和適應性波束成形器,利用所建構之函式庫完整的架構陣 列訊處理模擬平台。. 文中模擬各模組驗證其正確性,也分別對降低系統導引量化誤差、方位估測之方 法做分析,最後以模擬和分析完整的陣列訊號處理模擬平台以驗證其正確性及其方便 性。. (關鍵字:陣列訊號處理,適應性波束形成器,方位估測,MATLAB/SIMULINK). I.
(4) Analysis and Simulation of Array Signal Processing System. Student : Hao-Wei Wang. Advisor : Chao-Hung Chen. Department of Electrical Engineering I-Shou University Abstract A program library in Matlab/Simulink of array signal processing with passive array sensors is constructed.The simulation environment is mainly based on underwater acoustic. The program library can be used conveniently to construct a complex simulation platform based on underwater acoustic like many targets and arrays. The first, we plan for array signal processing on underwater acoustic and then constructed the models. The finally, the models embedded in the program library. It includes MUSIC and Adaptive Beamforming methods in paper. The program library can be used to construct a complete simulation platform of array signal processing. In paper, simulating all of the models tests exactitude. Also analyze to reduce system steering delay quantization error and DOA methods. Finally, analysis and simulation of complete array signal processing simulation platform tests the correctness and convenience.. (Keyword︰Array Signal Processing, DOA, Adaptive Beamformer, Matlab/Simulink). II.
(5) 誌謝 回想這兩年的碩士生涯時光飛逝,是我學生生涯中最充實的兩年,將在心中無法 抹滅。畢業後不論就業亦或是深造,努力朝著自己夢想努力,雖然占求學過程的比例 是短暫的,但記憶卻猶是深刻。 本論文之研究得以順利完成,首先承蒙指導教授陳昭宏博士這兩年來不畏辛勞的 指導,總是不忘給學生精神鼓勵,在學習遇到瓶頸時,都能適時的給予幫助與解惑, 以縝密有條理的思考邏輯指導,近而引導培養獨立思考與解決問題的能力,在此謹向 老師致上最誠摯的謝意。並感謝口試委員凌衍雷博士、陳金塔博士對本論文所給予的 寶貴意見與指正,使本論文更臻完善。同時也感謝學長仁傑、焜城、學弟恆誌在論文 上的鼓勵與幫助,以及感謝所有同學及學長學弟的熱心相助,更感謝爸爸與媽媽在精 神和經濟的支持與援助,使我毫無顧慮的順利完成這段歷程,專心致力於學業與研究, 感謝所有幫助我及關心我的人,在此深深獻上萬分的感謝與祝福,願您們一起分享此 榮譽與喜悅。. III.
(6) 目錄 摘要............................................................................................................................................I Abstract .................................................................................................................................... II 誌謝......................................................................................................................................... III 目錄......................................................................................................................................... III 圖目錄.....................................................................................................................................IV 表目錄................................................................................................................................... VII 第一章 前言............................................................................................................................. 1 1-1 1-2. 背景簡介與研究動機.............................................................................................. 1 論文架構.................................................................................................................. 4. 第二章 研究方法與原理......................................................................................................... 5 2-1 2-2. 方位估測.................................................................................................................. 5 適應性演算法.......................................................................................................... 7. 第三章 陣列訊號處理之架構與規劃................................................................................... 12 3-1 3-2. 方位估測法............................................................................................................ 12 波束成型器............................................................................................................ 14. 第四章 系統架構與規劃....................................................................................................... 22 4-1 4-2 4-3 4-4. 建立系統模組........................................................................................................ 22 建立函式庫............................................................................................................ 26 以匯流排(BUS)傳輸 ............................................................................................. 27 模型驗證................................................................................................................ 27. 第五章 模擬系統應用與驗證............................................................................................... 32 5-1 5-2. 模擬系統之建檔方式............................................................................................ 32 模擬情境與驗證.................................................................................................... 33. 第六章 適應性陣列系統模擬及分析................................................................................... 37 6-1 導引量化誤差........................................................................................................ 37 6-2 方位估測比較 ........................................................................................................ 41 6-3 波束成型器模擬比較 ............................................................................................ 43 第七章 結論與未來展望....................................................................................................... 63 參考文獻................................................................................................................................. 65. III.
(7) 圖目錄 第一章 圖 1- 1:海上船舶場景 .......................................................................................................... 2. 第二章 圖 圖 圖 圖 圖 圖 圖. 2- 1:方位估測示意圖....................................................................................................... 5 2- 2:雜訊消除系統架構區塊圖....................................................................................... 7 2- 3:訊號預測系統之架構區塊圖................................................................................... 7 2- 4:未知系統辨認之架構區塊圖 .................................................................................. 8 2- 5:反向系統辨認之架構區塊圖................................................................................... 8 2- 6:均方誤差性能曲面圖............................................................................................... 9 2- 7:LMS 架構圖 ........................................................................................................... 10. 第三章 圖 圖 圖 圖. 3- 1:波束成型示意圖 .................................................................................................... 15 3- 2:Frost Beamformer 示意圖 ...................................................................................... 17 3- 3:Griffiths-Jim version of the Frost Adaptive Beamformer....................................... 20 3- 4:加入 PILOT 之架構圖 ........................................................................................... 21. 第四章 圖 圖 圖 圖 圖 圖 圖 圖 圖 圖 圖. 4- 1:模擬架構圖............................................................................................................. 22 4- 2:陣列架構 configure subsystem............................................................................... 23 4- 3:陣列模組................................................................................................................. 23 4- 4:接收陣列................................................................................................................. 24 4- 5:Transport delay ....................................................................................................... 25 4- 6:陣列訊號處理函式庫............................................................................................. 26 4- 7:目標移動 ................................................................................................................ 27 4- 8:都卜勒效應............................................................................................................. 29 4- 9:簡易方位估測......................................................................................................... 30 4- 10:MUSIC 方位估測................................................................................................. 31 4- 11:Griffiths-Jim version of the Frost 波束成形器 .................................................... 31. 第五章 圖 5- 1:一目標物和一陣列之建檔示意圖......................................................................... 32 圖 5- 2:兩目標物和一陣列之建檔示意圖......................................................................... 32 圖 5- 3:兩目標物和兩陣列之建檔示意圖......................................................................... 33 IV.
(8) 圖 圖 圖 圖 圖 圖. 5- 4:target1 移動路徑圖 ................................................................................................ 34 5- 5:target2 移動路徑圖 ................................................................................................ 34 5- 6:目標物與線陣列角度關係..................................................................................... 35 5- 7:線陣列掃描角度..................................................................................................... 35 5- 8:目標物與環狀陣列角度關係圖............................................................................. 36 5- 9:環陣列掃描角度 .................................................................................................... 36. 第六章 圖 圖 圖 圖 圖 圖 圖 圖 圖 圖 圖 圖 圖 圖 圖 圖 圖 圖 圖 圖 圖 圖 圖 圖 圖 圖 圖 圖 圖 圖. 6- 1:導引延遲示意圖..................................................................................................... 37 6- 2:提高取樣的訊號..................................................................................................... 40 6- 3:加入分數延遲的訊號............................................................................................. 40 6- 4:MUSIC 和 MVDR 掃描相差 10 度....................................................................... 42 6- 5:MUSIC 和 MVDR 掃描相差 7 度......................................................................... 42 6- 6:MUSIC 和 MVDR 掃描減少功率 6dB ................................................................. 43 6- 7:情境一模擬多目標移動之建檔圖......................................................................... 44 6- 8:情境一移動 5 秒路徑圖......................................................................................... 44 6- 9:情境一 5 秒時 MUSIC 掃描角度圖...................................................................... 45 6- 10:情境一移動 5 秒路徑圖....................................................................................... 45 6- 11:情境一 15 秒時 MUSIC 掃描角度圖.................................................................. 46 6- 12:情境一 15 秒時未波束成形之訊號..................................................................... 46 6- 13:36 度所濾出之頻譜.............................................................................................. 47 6- 14;-20 度所濾出之頻譜 ............................................................................................ 48 6- 15:情境二模擬多陣列移動之建檔圖....................................................................... 48 6- 16:情境二多陣列相對移動 5 秒路徑圖................................................................... 49 6- 17:情境二 5 秒時方位估測....................................................................................... 50 6- 18:情境二多陣列相對移動 15 秒路徑..................................................................... 51 6- 19:情境二 15 秒時方位估測..................................................................................... 51 6- 20:情境二 15 秒時波束成形前之訊號..................................................................... 52 6- 21:情境二 23 度線和 118 度環狀之波束成形......................................................... 52 6- 22:情境二-44 度線和 62 度環狀之波束成形 .......................................................... 53 6- 23:情境三模擬多陣列、多目標移動之建檔圖....................................................... 54 6- 24:情境三 5 秒多陣列、多目標相對移動路徑圖................................................... 55 6- 25:情境三 5 秒時方位估測....................................................................................... 56 6- 26:情境三 5 秒時波束成形前之訊號....................................................................... 57 6- 27:情境三 5 秒時-7 度線和-86 度環狀之波束成形................................................ 57 6- 28:情境三 5 秒時-50 度線和 45 度環狀之波束成形 .............................................. 58 6- 29:情境三 5 秒時 31 度線和 122 度環狀之波束成形............................................. 58 6- 30:情境三 15 秒多陣列、多目標相對移動路徑圖................................................. 59. V.
(9) 圖 圖 圖 圖 圖. 6- 31:情境三 15 秒時方位估測..................................................................................... 60 6- 32:情境三 15 秒時波束成形前之訊號..................................................................... 60 6- 33:情境三 15 秒時-50 度線和 56 度環狀之波束成形 ............................................ 61 6- 34:情境三 15 秒時-12 度線和-91 度環狀之波束成形............................................ 61 6- 35:情境三 15 秒時 24 度線和 119 度環狀之波束成形........................................... 62. VI.
(10) 表目錄 第六章 表 6- 1:模擬 8 個 sensor 之導引延遲比較表 .................................................................... 39. VII.
(11) 第一章 前言 首章先對與所模擬之場景和陣列訊號處理做簡介和描述陣列訊號處理之重要性故 建立研究平台之動機,在第二節部分對與論每個章節做簡介。. 1-1 背景簡介與研究動機 海中環境不同於空中或者陸地上,海水對於雷達波與光波等電磁波類型的訊號具 有強烈的吸收作用,使得電磁波在水中傳播的距離極為有限;但是聲音訊號卻能在水 中傳播相當遠的距離,甚至在深海中一靈敏的偵測器可收到 10000~15000 公尺外聲源 所發出之聲音訊號,所以運用聲波探測水文情況或偵搜潛航中之潛艇是目前最為有效 的方法。 水下技術的日趨進步,自 1970 年後,由於電子計算機運算能力大增且逐漸普及, 計算力學領域蓬勃發展,提升解決複雜水下技術之問題。其主要發展起因應於戰爭時 的需求而所研發的技術,隨著國際間敵對狀態的趨緩,其技術也逐漸也轉移至民間, 在民間方面由於對海洋資源和運輸上的需求,海上活動日漸頻繁,不論是在軍事上或 是在水上航行的船隻間,估側其它船隻方位以了解其動向,應用在軍事上的用途或是 一般船舶之間,可避免發生的碰撞問題,對於水上船舶的方位估測有其必要性。 而陣列訊號處理的技術廣泛地應用於水下通訊系統、雷達、聲納或導航系統中目 標物之定位、波束(beamforming)及追蹤(tracking)。. 1.
(12) 圖 1- 1:海上船舶場景 如上圖 1-1 假使船舶在行進間對於水上航行目標物估測其方位,船的聲源所產生 之訊號經過通道,在使用多個感測器做訊號接收,在將接收後的訊號做陣列訊號處理, 天線陣列訊號處理[15]的技術主要分為波束成型器(Beamforming) [15]與方位估測 (Direction Of Arrival)[23]兩大主題,波束成型器是設計一個空間濾波器(Spatialfilter) [11],保留我們想要的訊號,抑制干擾源。方位估測(Direction Of Arrival)主要在於偵測 訊號源之方位角,其用途可使用於目標物之追蹤、定位或發展智慧型天線(Smart Antenna)[20],可運用於通訊系統中以增進通訊之效能。由於水中通訊無法像在陸地通 訊一樣使用電磁波為載波,必須用聲波來傳遞,所以 DOA 運用在偵測水中聲源時, 由於水中環境複雜及其多變性,在偵測上將提高固難度。而一般對於目標物之偵測其 方式有〝主動式感測器陣列系統〞(active sensor array system)與〝被動式感測器陣列系 統〞(passive sensor array system)[17]等兩種方式,在本文中以使用被動式感測陣列來偵 測訊號源之參數,即系統本身不發出任何訊號而僅接收目標物所發出之訊號,並透過 適當演算法之計算得到訊號源之方位角。目前方位估測主要是利用陣列訊號處理(array signal processing)的技術,主要是應用不同幾何形狀排列的感測元件組成感測陣列,藉 由對波場(wave field)的取樣,收集暫態空間的相關訊息來估測有用的訊號參數,進而 估測出訊號的方位角。對於估得的方位角再以波束成形(Beamform)器,濾出所要的訊 2.
(13) 號。在方位估測的技術上以 MUSIC(MUltiple SIgnal Classification)[25]演算法最具代表 性,此演算法的概念是將陣列感測器接收訊號後,將訊號已陣列形式作為輸出資料做 自相關(autocorrelation)運算後,再把所得到的自相關矩陣(covariance matrix)做特徵分 解 , 將 其 特 徵 向 量 空 間 分 解 成 訊 號 子 空 間 (signal subspace) 與 雜 訊 子 空 間 (noise subspace),利用訊號與雜訊間互相正交(orthogonal)的特性,得到訊號對於陣列所估測 的角度,其特性是在理想情況下具有高解析度(多個感測器)。然而其空間搜索方式是 代入所有角度求最大值,當所要尋找角度眾多時耗費大量時間,因此 Barabell 提出 Root-MUSIC[15]演算法大大減少角度搜尋的時間,其後利用雜訊子空間[16]的方法延 伸的 MUSIC;而 ESPRIT[18]演算法在 1989 年由 Roy 和 Kailath 共同提出的,是一種 使用訊號子空間不變的原理來得到訊號源的資訊,但需要使用到較多的感測器,若是 要以一維線性陣列作估測,所要估測 M 個訊號源,至少需使用(M+1)個感測器且需以 特定方式排列,再將(M+1)個感測器視為二組個數同為 M 個的感測器陣列,此時訊號 源資訊會包含在二組子陣列造成的相位延遲上,利用二組接收矩陣間的子空間旋轉特 性得到相位資訊,不需像 MUSIC 演算法一樣做繁複的角度搜索動作。由於水下多重 路徑干擾嚴重,其折射所產生的多重路徑的效應必然造成同調訊號的產生,也就是同 一訊號源產生,其頻率成分相同,只有相位與振幅的不同,當訊號源間的相關性非常 大或甚至為同調訊號的情形時,MUSIC、ESPRIT 等都將不適用,所以一般會以空間 平滑法(Spatial Smoothing)[26]對訊號進行去相關(decorrelae),之後再以演算法求出方 位角。將所估測的角度,再以適應性處理作為波束成形器[11],適應性演算法之應用 於:雜訊消除系統、訊號預測系統、未知系統辨認、反向系統辨認,其中主要以 LMS(Least mean square algorithm)[10]和 RLS(recursive least square)[19] 最具代表性皆 被廣泛使用和延伸,LMS 其架構簡單實現容易,但其收斂數度較慢。RLS 雖然其收斂 數度較快,但是其運算量較大複雜度也較高,硬體實現上較不容易。Frost[6]和 Griffiths[8]等人也發展出了兩種重要的 Beamformer 架構,分別是 Frost 的 Adaptive Frost Beamformer 和 Griffiths 的 GLMS,雖然這兩種型態的 Beamformer 都已經被廣泛使用,. 3.
(14) 但 是 卻 會 受 到 因 反 射 波 而 形 成 之 Coherent Source 的 影 響 而 產 生 Desired Signal ancellation 效應,使得原本要保留的訊號被反射波影響而受到壓制。. 1-2 論文架構 本論文共分為 7 章,以下為各章內容之大綱 第一章、緒論:說明本論文的研究背景與目的。 第二章、基本原理簡介︰簡單介紹方位估測基本原理和適應性演演法 MSE 之推導和 LMS 架構。 第三章、使用之方位估測法和波束成形之架構說明。 第四章、系統架構說明如何建構系統及對系統模組介紹及驗證。 第五章、介紹模擬系統如何建檔及應用之情境與簡單結果驗證。 第六章、第一節對於系統所使用的導引量化誤差作簡單的分析,第二節對方位估測法 之間的比較,第三節比較波束成形之效果。 第七章、結論與本論文之貢獻和未來展望。. 4.
(15) 第二章 研究方法與原理 陣列訊號處理的技術主要分為方位估測 (Direction Of Arrival)與波束成型器 (Beamforming)兩大主題,在本章會對訊號模型假設和方位估測原理的簡介,由於本論 文所使用的波束成形器為適應性架構,故在第二節會對適應性訊號處理做簡介。. 2-1 方位估測 假設: 訊號源之間是非同調訊號 (noncoherent) 訊號源是窄頻訊號 (narrowband) 訊號源位於遠場 (far field),入射至感測陣列的聲波可視為平面波。 一個聲源訊號可以視為以源點為中心向四周擴散的球面波,當訊號源與感測陣列 距離一段遠距離後,可將訊號源之波前(wavefront)表示為一平面波。. 圖 2- 1:方位估測示意圖. 5.
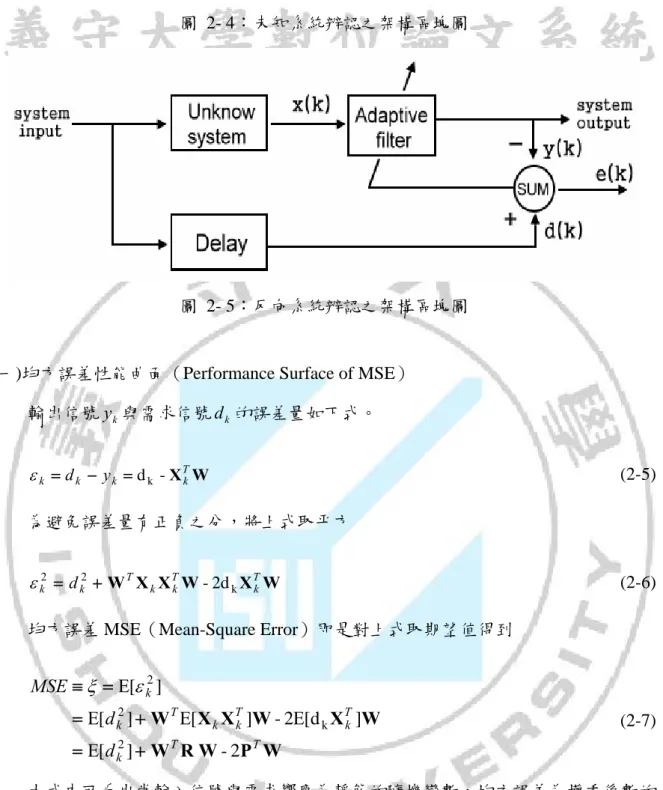
(16) 如上圖 2-1,訊號源經過一段遠距離到達參考感測器後,在經過一段時間才會到 達第 M 個感測器[4],如下式: . ~ ~ d a~ d cos c c. (2-1). a~ :為參考感測器到第 M 個感測器之方向向量. c :為介質中的傳導速度 若考慮 N 個窄頻且互為獨立之訊號源,其中心頻率為則第 M 個感測器輸入如下:. y m (t ) . N. . k 1. s k (t )e. j 0. . N. . k 1. s k (t )e. j 0. d M cos k c. (2-2). s k t :第 k 個訊號源。 1 k N , d M 第一參考感測器到第 M 個間之距離。. 以矩陣型式表示則為:. Y(t) AS(t). (2-3). 其中 A 為. 1 1 j0 d2 cos c e d cos 1 j 3 A e 0 c j0 d M cos1 c e. 1. e e. d cos 2 j0 2 c d cos 2 j0 3 c. . e. d cos 2 j0 M c. . e d cos N j0 3 a a a c e 1 2 N ... d M cos N j0 c e 1. j0. d 2 cos N c. (2-4) 矩陣 A 為方向矩陣或導引矩陣(steering matrix),向量 a k a k , k 1,2, , N 為 導引向量,而 a a1 a 2 a N 向量的子空間,只有一組固定的訊號入射角. 6.
(17) 與之對應,因此一組 N 個訊號源以 1 2 N 固定角度入射經陣列感測器接收後只 會產生一組方向向量。. 2-2 適應性演算法. 適應性演算法應用在未知的環境下做特性的追蹤,所以在訊號處理領域方面有重 要的用處,其可區分為四大類,以下列區塊圖所示為各應用之系統架構圖:. 圖 2- 2:雜訊消除系統架構區塊圖. 圖 2- 3:訊號預測系統之架構區塊圖. 7.
(18) 圖 2- 4:未知系統辨認之架構區塊圖. 圖 2- 5:反向系統辨認之架構區塊圖. (一)均方誤差性能曲面(Performance Surface of MSE) 輸出信號 y k 與需求信號 d k 的誤差量如下式。 k d k y k d k - X Tk W. (2-5). 為避免誤差量有正負之分,將上式取平方. k2 d k2 W T X k X Tk W - 2d k X Tk W. (2-6). 均方誤差 MSE(Mean-Square Error)即是對上式取期望值得到. MSE [ k2 ] [ d k2 ] W T [ X k XTk ]W - 2[d k XTk ]W. (2-7). [ d k2 ] W T R W - 2P T W 由式中可看出當輸入信號與需求響應為靜態的隨機變數,均方誤差為權重係數的 二次方程式, R [ X k X Tk ] 為輸入信號的自相關矩陣, P [d k X Tk ] 為需求響應與輸入 信號的互相關向量,此二次式繪出碗型曲面,以二維為例如圖 2-6,緃軸為 MSE,水 平軸為二個權重係數,碗型的底部即為最小 MSE 投影在權重係數向量平面的最佳權 重係數向量 W 。. 8.
(19) 為了尋找性能曲面的 Minimum MSE,利用梯度估測法對 MSE 微分,當梯度等於. 0 時而得到 Wiener-Hopf equation W R 1 P ,解出 W 即為 Minimum MSE。. w w0 w1 wL . T. (2-8). 2RW 2P 0 W R 1P. 圖 2- 6:均方誤差性能曲面圖. (二)LMS 演算法 適應性演算法以最小均方 (least mean square, LMS) 和遞迴式最小平方 (recursive. least square, RLS)兩種演算法最具代表性;前者 LMS 演算法的運算量少,但收斂速度 受到輸入信號的統計特性所影響,需花較多時間達到要求的收斂性能;後者 RLS 演 算法雖具有快的收斂速度,但卻需要巨大的運算量,為其權重係數量兩倍的運算量。 若以 RLS 演算法進行空間響應之估測將耗費處理器大部分的運算資源,就算具有即 時反應之性能,系統也將沒有能力再執行額外的工作,這種情形是無法滿足實際的運 用需求的。如上所述,雖然 LMS 演算法先天上有收斂慢的缺點,但由於其所需運算 量少的優點,若不在運算量少的本質上嘗試改善其收斂性能,如提昇收斂速度和降低 估測誤差等等。. 9.
(20) 圖 2- 7:LMS 架構圖 傳統的 LMS 演算法中可分為濾波(filtering processing)與係數調整(adaptive. processing)兩個程序,在每一個取樣週期裡,以下面三個關係式表示之: LMS 演算法是使輸出誤差信號的平均平方值最小化 e 2 (mineralized),而其定義 為:. J ( n) e( n ) 2. (2-9). 演算法輸出值:. y ( n ) w( n ) * x ( n ) (2-1 0) 計算估測誤差值:. e( n) d ( n) y ( n) (2-1 1) 調整權重係數:. 10.
(21) w(n 1) w(n) ue(n) x(n) (2-1 2) d(n)是理想訊號或想要的訊號,w(n)演算法的權重,y(n)為輸出訊號,,而 d(n)與 y(n)的差值則為 e(n),它代表估測的誤差量,μ 值稱為權重調整因子,而 LMS 演算 法,其著重於調控系統期望值 d(n)與濾波器輸出 y(n) 之差 e(n), 值是控制調整步 階的固定參數,不斷更新修改演算中之權重係數向量 w(n) 值,並使得 e(n) 平方最 小,使誤差趨近於零用來與 d(n)估測誤差量它控制著權重係數調整的幅度,其設定會 影響演算法的收斂與發散及收斂速度。. LMS 演算法其步階參數 μ 值的取捨問題卻相當的重要,μ 值用來調整加權參數 的修正速度,若 μ 值選取過小的話,收斂速度會過於緩慢,若是選取過大時,則是會 造成收斂不穩定,導致發散,所以找尋最佳的 μ 值是 LMS 演算法很大的課題。μ 值的選取上有一定的限制,收斂條件為:. 0 . 1 ( M 1) P (2-1. 3) P:所有訊號之功率,M:訊號源數目。 本文中的波束成形器主要在 LMS 架構中做改變,加入 PILOT 訊號、限制權重量 方式,來作為波束成形器之架構。. 11.
(22) 第三章 陣列訊號處理之架構與規劃 本章對於函式庫內所建立的方位估測法和波束成形器之架構做介紹,方位估測法 中 加 入 以 最 具 代 表 之 演 算 法 MUSIC , 而 在 適 應 性 波 束 成 形 器 加 入 了 Adaptive. Beamformer with a Pilot、FROST Adaptive Beamformer、Griffiths-Jim version of the Frost Adaptive Beamformer 和 MVDR。在下面各節中會對各方法一一做介紹。. 3-1 方位估測法 方位估測主要是利用陣列訊號處理(array signal processing)的技術,主要是應用不 同幾何形狀排列的感測元件組成感測陣列,藉由對波場(wave field)的取樣,收集暫態 空間的相關訊息來估測有用的訊號參數,進而估測出訊號的方位角。. (一) MUSIC: MUSIC(Multiple Signal Classification)在眾多特徵分解之方法中,此方法不僅可估 測出訊號源之方位角,主要將感測陣列所接收之資料取自相關矩陣,並將此矩陣作特 徵分解,而得到特徵向量並由此向量分別展開為訊號子空間與雜訊子空間,然後將雜 訊子空間提出,利用方向向量和雜訊子空間互為正交之關係而求得訊號源的入射角度。 假設空間上 M 個彼此不相關的穩態訊號,伴隨著通道中的白色高斯雜訊到達由 N 個感測元件所組成之感測陣列,陣列輸出為 Y,如下式所示,由 Y 取自相關得到接收 資料自相關矩陣 R (Autocorrelation matrix). R EYYH. . . AE SS H A H σ 2 I H. (3-1). 2. ADA σ I A:方向向量,D:訊號自相關矩陣(Autocorrelation matrix) ,σ2:雜訊變異數 (noise variance),I:單位矩陣 (unit matrix). 12.
(23) 由矩陣運算之特徵值分解,對 R 做特徵分解. Rv i λi v i. (3-2). λi 為第 i 個特徵值, v i 則為其對應之特徵向量,由於訊號源數目小於感測器元件 數目(N<M) , ADA H 為奇異(singular)矩陣,其行列式(determinant)為零,所以存在 最小特徵值為零,且 A 為全秩(full rank),D 為正定(positive definite) ,而 ADA H σ 2 I 為非負定(nonnegative definite),也就是其特徵值大於等於零,所以 R 存在有最小特徵 值 σ 2 ,個數為(M-N)個,我們將所有特徵值求出,則有如下之關係:. λ1 λ2 λM 1 λN σ 2. (3-3). 其中較大之特徵值 λ1 , λ2 , λM 可對應特徵向量 v 1 , v 2 , v M ,並可展開為訊號子空 間 E S ,而較小之特徵值 λM 1 , λM 2 , λN 則對應特徵向量 v M 1 , v M 2 , v N ,並可展開為 雜訊子空間 E N 。因 R 為厄米特(Hermitian) 矩陣,由其特性可知相異特徵值所對應之 特徵向量必互為正交,即雜訊子空間與訊號子空間互為正交。我們由. Rv i λi v i σ 2 v i. i M 1,, N. (3-4). 帶入上式可得. ( ADA H σ 2 I σ 2 I ) v i 0. i M 1, , N. (3-5). 而 AD 不為 0. AH vi 0. i M 1, , N. A 即為方向向量 A H a 1. (3-6). a2 aM . H. E S aθ aθ E N aθ 0. 而 . 13.
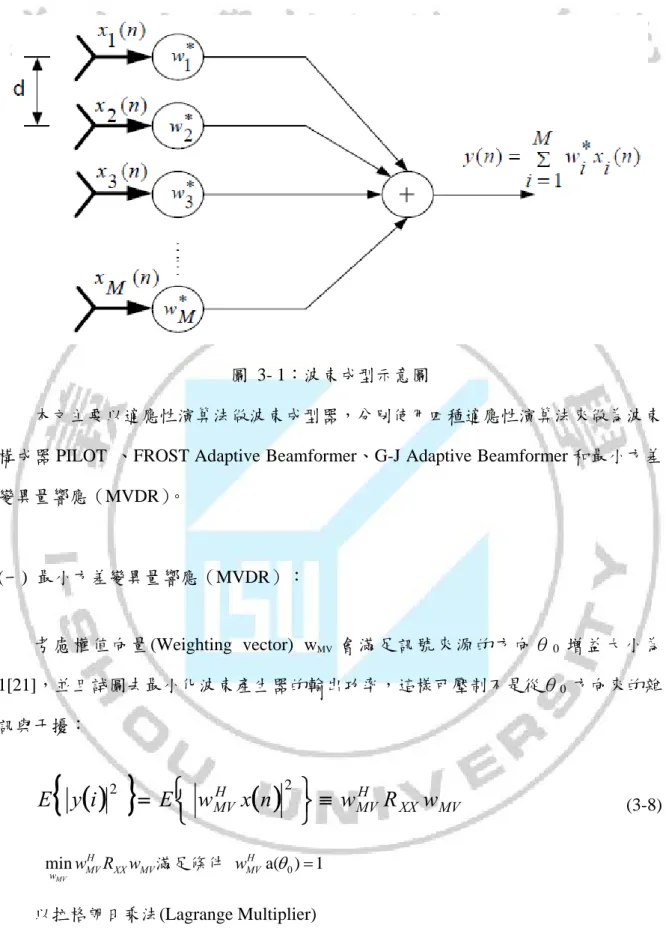
(24) 因為雜訊子空間與方向向量 a 相互正交,或說是方向向量 a 在訊號子空間有 最大的投影量,利用此關係可以找出訊號源的到達角度。透過 MUSIC 的函數,我們 可以用掃描其頻譜峰值的方式找出所有可能的訊號到達方向。. S MUSIC . 1 E N aθ . 2. . 1. a. H. θE N E HN aθ . (3-7). 將θ由-2π至 2π帶入計算 S MUSIC 而得到假性頻譜圖(pseudo-spectrum),藉圖中觀 察峰值存在之位置,其所對應之角度就是訊號源之入射角度。 由於 MUSIC 演算法主要是擷取雜訊子空間出來做計算,因此需先求得訊號源數 目,才能擷取正確的雜訊子空間,因此在做特徵分解計算時要先求得訊號數目。. 3-2 波束成型器 波束形成的功能是為了要接收空間中特定角度的訊號同時消減其他方向的干擾, 形成波束(Beam)就像是專門接收空間中特定方向的入射能量,一般的陣列系統在接收 空間中傳遞的訊號經常會遭遇到干擾訊號,如果來源訊號與干擾訊號佔住同一個頻 帶,則使用時間的濾波器是沒辦法分離出訊號與干擾源,然而訊號與干擾源通常來自 空間中不同的方位,這時分割空間就可以將來訊號抽取出來利,利用波束產生器. (Beamformer)可以將權值與所得的天線資料相乘。這樣就可以得到空間濾波後的結果。. 14.
(25) 圖 3- 1:波束成型示意圖 本文主要以適應性演算法做波束成型器,分別使用四種適應性演算法來做為波束 構成器 PILOT 、FROST Adaptive Beamformer、G-J Adaptive Beamformer 和最小方差 變異量響應(MVDR)。. (一) 最小方差變異量響應(MVDR):. 考慮權值向量 (Weighting vector) wMV 會滿足訊號來源的方向θ 0 增益大小為. 1[21],並且試圖去最小化波束產生器的輸出功率,這樣可壓制不是從θ0 方向來的雜 訊與干擾:. . E y i . 2. E w. H MV. 2 H x n w MV R XX w MV . (3-8). H H min wMV RXX wMV 滿足條件 wMV a( 0 ) 1 wMV. 以拉格朗日乘法(Lagrange Multiplier). . . H H w wMV R w w a( 0 ) 1 0 XX MV w MV MV MV H wMV a( 0 ) 1 15. (3-9).
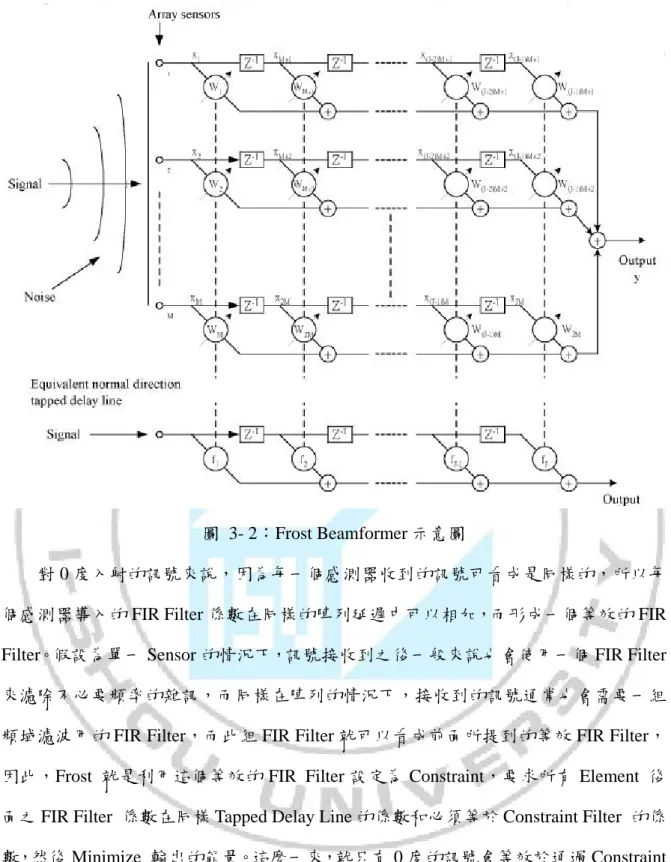
(26) 滿足. R XX wMV a( 0 ) H wMV a( 0 ) 1 (3-1 0) 1. 假設 R XX 為 nonsinguar 的情況下,則可得到 wMV RXX a( 0 ) 其中 H wMV R XX wMV . 1 a H ( 0 ) R XX 1 a( 0 ). (3-1 1) 為波束成形器之輸出的能量。 因此求得權值為 wMV . R 1 XX a( 0 ) 1 a H ( 0 ) R XX a( 0 ). (3-1 2) S MVDR 0 . 1 a H ( 0 ) R XX 1 a( 0 ). (3-1 3). (二) Frost Adaptive Beamformer:. Frost Beamformer 是在陣列中每個 Element 都會接收到訊號,而 Frost 對每個 Element 所接收到的訊號導入一組 FIR Filter 中,以此組 FIR Filter 來改變接收訊號之 頻率響應後,將不同 Element 的結果相加,以達到消去非 0 度入射訊號之結果,如下 圖所示: 16.
(27) 圖 3- 2:Frost Beamformer 示意圖 對 0 度入射的訊號來說,因為每一個感測器收到的訊號可看成是同樣的,所以每 個感測器導入的 FIR Filter 係數在同樣的陣列延遲中可以相加,而形成一個等效的 FIR. Filter。假設為單一 Sensor 的情況下,訊號接收到之後一般來說也會使用一個 FIR Filter 來濾除不必要頻率的雜訊,而同樣在陣列的情況下,接收到的訊號通常也會需要一組 頻域濾波用的 FIR Filter,而此組 FIR Filter 就可以看成前面所提到的等效 FIR Filter, 因此,Frost 就是利用這個等效的 FIR Filter 設定為 Constraint,要求所有 Element 後 面之 FIR Filter 係數在同樣 Tapped Delay Line 的係數和必須等於 Constraint Filter 的係 數,然後 Minimize 輸出的能量。這麼一來,就只有 0 度的訊號會等效於通過 Constraint. Filter 而被留下來,至於其他方向的雜訊就被 Minimize 掉了。 Adaptive Frost Beamformer[6]的原理和 Frost Beamformer 相同,只不過它不像 Frost Beamformer 必須一次求出最佳解,而是用 Adaptive 的方式逐漸逼近最佳解。. 17.
(28) 由於本文中所用之 Adaptive Frost Beamformer 為處理窄頻的訊號,故所使用公式 維度為 K*1,首先定義權重與輸入訊號,K 為感測器數目 定義之權重 Wk [7]. . Wk w1k. w2k w( K 1)k. . T. (3-1 4) 定義之輸入 X k. . X k x1k. x2k. x ( K 1) k. . T. (3-1 5) 定義 Constraint Filter 的係數 C. C 1 1 ... 1Wk (3-1 6) 首先,最小化所輸出功率,而 y k 在使架構中為"error"值. Wk 1 / 2 Wk 2 y k X k. (3-1 7) 第二步限制權重的錯誤值向量. 18.
(29) C 1 1 ... 1Wk 1 / 2. (3-1 8) 將權重限制的值正確表示成 1 C 1 1 ... 1Wk 1/ 2 e1K 1/ 2 K. (3-1 9) 定義成 K 1 之矩陣 Ek 1 / 2. e1K 1 / 2 E k 1 / 2 e1K 1 / 2 . (3-2 0) 將 E k 1 / 2 加入權重值. Wk 1 W k 1 / 2 E k 1 / 2. (3-2 1) 將式子整理,最後可表示成. Wk 1 Wk 2uy k X k E k 1 / 2. (3-2 2). 19.
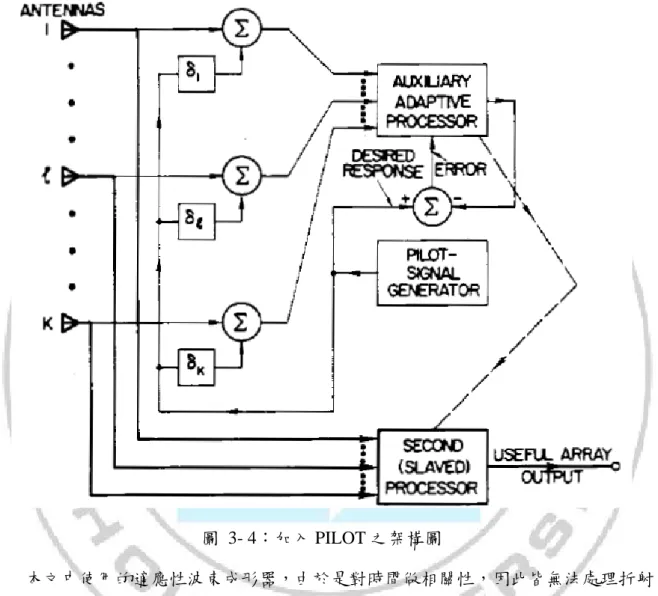
(30) (三) Griffiths-Jim version of the Frost Adaptive Beamformer:. Griffiths-Jim 波束成形器為一種使用 Adaptive noise canceller 之波束構成器,其目 的是要將所要的訊號與雜訊分離。由多個感測器所收集訊號經過特定的時間延遲到所 要估測的角度後,可視為每一個經延遲的感測器訊號成份內皆含有相同的目標訊號, 但各組訊號之間的雜訊成份則不相同。 如圖 3-3[7]先將每個感測器導引至所要估測訊號的角度,再將陣列所有訊號相加 後做為 desire 訊號,再將感測器輸出之訊號兩兩相減,主要是將每一個經延遲的感測 器訊號成份內皆含有相同的目標訊號消去得到雜訊,再將取出的雜訊與 desire 訊號做 相減的動作,因此其架構所得到目標訊號在 error 端的輸出上。. 圖 3- 3:Griffiths-Jim version of the Frost Adaptive Beamformer. (四) Adaptive Beamformer with a Pilot: 如下圖 3-4[24]是由原本的 LMS 中延伸,加入一 Pilot 訊號,將其導引至所要觀測 的角度,在與感測器接收的訊號相加,作為波束成形器之輸入訊號,而 Pilot 訊號為. desire 訊號,在將權重複製出來與感測器訊號相乘,在本文所架構之波束成形器,將. 20.
(31) 所有感測器做導引至特定角度,而對 Pilot 不做導引動作,但此加入 Pilot 方法若 Pilot 訊號頻率與所要估測頻率不同時,會無法消除 Pilot 訊號,而對所要的目標訊號造成影 響。. 圖 3- 4:加入 PILOT 之架構圖 本文中使用的適應性波束成形器,由於是對時間做相關性,因此皆無法處理折射 波 coherent source 的影響,而有 Desired signal cancellation 效應使得原本要保留的訊號 受反射波影響而被消除。. 21.
(32) 第四章 系統架構與規劃 將一個在水上行駛的船隻視為目標物,目標物產生的聲源為目標的訊號,以及建 立一個接收訊號的陣列感測器,產生的訊號經過模組所建立的水中環境到達接收的感 測器,感測器陣列接收時實際通道會造成其接收的訊號有延遲效應,加入模擬實際情 境雜訊,將接收後的訊號做訊號處理來估測目標物的方位。利用 MATLAB/SIMULINK 建立陣列訊號模擬平台,其架構如下圖 4-1:. ArrayRx array. arrayBout target. <Rxout >. arrayBin. target. Target. model LIB. In1. Out1. Target. rceivr array model. AWGN noise. array signal processing DOA inDOA out. enviroment def. Direction Of Arrival. 圖 4- 1:模擬架構圖. 4-1 建立系統模組 (一)建立 target(目標物)and sensor (感應器): 在實際上目標物和感應器,對於陣列訊號接收的影響取決於其相對位置,因此將 這兩部份分別建在 model LIB 此一模組功用主要將訊號和接收定義在座標系統上。 考慮船隻在真實中所會產生的訊號源及在接收時的情境,需將這些變因考慮在目 標物的系統中以符合實際情境,不同的船產生不同的訊號源、船的航行速度、位置、 和船航行的走向,船頭船尾所造成的聲源會有不同大小,將這些實際變因做成相對應 的狀態,故在目標物(target)中建立:產生的訊號源、訊號源的位置、訊號源的移動方式、 訊號源之輻射場。. 而影響陣列感應器有:感應器排列方式不同造成所接收到的訊號會造成有不同的 延遲產生、感測器和目標物一樣也有移動的情形和聲源場的問題,故在感應器(sensor). 22.
(33) 中建立:陣列的擺放方式和方向、感測器數目、陣列的位置、陣列的移動方式、陣列 之輻射場的情形。. 對於船支產生的訊號源和陣列感應器接收範圍所造成的周圍輻射場,以取樣方式 擷取其輻射場數據,再用 s-function[14]以內插法產生所需要的輻射場。 ArrayFreq.=1000(Hz) WaveSpeed=1500(m/s) sensor no.=64 array to heading=90(deg) array Aperature=47.25(M). Template struc. CH_sinal. architecture ArrayFreq.=1000(Hz) WaveSpeed=1500(m/s) sensor no.=64 array to heading=0(deg) array Aperature= 0(M). linear array ArrayFreq.=1000(Hz) ArrayFreq.=1000(Hz) WaveSpeed=1500(m/s) WaveSpeed=1500(m/s) sensor no.=0 sensor no.=64 array to heading=0(deg) array to heading=0(deg) array Aperature= 0(M) array Aperature=15.28(M). array2. 0_empty array. circle array. 圖 4- 2:陣列架構 configure subsystem. 將這些可能的情境建整合成其特性的元件,將不同的情境儲存在 configure. subsystem[12]中,就可呼叫所建立的 configure subsystem 在選擇想要的情境作為輸出, 如上圖在建立 Model Browser 中的 array architecture 為陣列感應器的排列架構,將可能 的陣列擺放方式:線陣列、環狀陣列、方形陣列…等建立於 configure subsystem 中, 再建檔時可直接呼叫鎖想使用的情境,以方便在建立平台使用。 ArrayFreq.=1000(Hz) WaveSpeed=1500(m/s) struc sensor no.=64 array to heading=0(deg) CH_sinal array Aperature=15.28(M). sensor_pos. ch_signal. architecture. Wt. circle array. weighted gain speed=0 cordIn. CordOut. moving. movingTs=0.1 init.pos=[0 0 0] heading=0. pattern_time path. moving simulator. 0_Still. 圖 4- 3:陣列模組. 23. Parray gain_pattern. 1.Parray.
(34) 將目標和陣列所可能有的特性(如:陣列架構、輻射場取樣、移動方式)整合到模 組中,建立出目標物(target)和感測器(sensor)模組如上圖。. (二)環境模型建立: 建立 environment define (環境影響)模組,將目標物產生的聲源經過水中環境到達 感應器時所會造成影響訊號的通道特性,訊號經過通道後沒有任何影響時為理想環 境。但實際路徑對於訊號會造成訊號上的衰減和訊號在接收上所造成的通道延遲,和 在水中產生之折射及都卜勒效應(Doppler)[27],在環境影響(environment def)中對於通 道上的參數做設定。. (三)環境模型與訊號及陣列之整合: 建立 receiver array model (接收陣列)模組,整合目標物、感測器和環境影響內收集 的參數及訊號,集中在此處處理,對於每個感測器接收到的訊號,由於目標訊號到參 考感測器之通道上的延遲和衰減視為相同,因此將通道特性和陣列特性分開做處理,. (如下圖 4-4)陣列為 64 個感測器在計算通道的衰減和延遲只需用一個輸入,可減少 BUFFER 所需要的暫存量及模擬時所需要的運算量和時間。 sensor_gain. 64 [1x64] [1x64]. Tx gain. {target}. cal. gain. 7{73} <source>. Ti. channel delay sensor delay. [1x64]. [1x64] channel Delay. Ti. cal. channel delay. array Delay. 圖 4- 4:接收陣列 u(t) ti(t). Ti. y (t)=u(t-td(t)). Variable Transport Delay. 24. [A].
(35) 圖 4- 5:Transport delay 在本模組中所使用的延遲為,Simulink 的 Transport delay Block 它是一類比元件, 如上圖 4-5 u(t)為所輸入之訊號,ti(t)為輸入所需延遲的時間,y(t)為輸出其中 td(t)為計 算出所模擬的延遲時間,能模擬實際移動所造成的都卜勒效應,一般延遲元件所模擬 的延遲時間,只將當下所需延遲時間直接做延遲,而本文所使用之模組會對於延遲的 時間變化量而以解微方程而作出真實延遲。. Transport delay Block 之輸出公式. y (t ) u (t t d (t )). (4-1). 以流體為例. t i (t ) . L vi (t ). (4-2). L 為管的長度, vi (t ) 為流體的速度, t i (t ) 為流體將管所填滿的時間,其關係如上 式 t. 1. t t (t ) ti ( )d 1. (4-3). d. L 為常數將 t i ( ) 倒數做積分相當於對速度積分,而以解微分方程求出實際延遲量 td(t). (四)建立 array signal processing (陣列訊號處理)模組: 建立陣列訊號處理中的方位估測(DOA)和波束成形器(Beamformer),以方位估測 演算法先估測出方位角,再將所估得方位角以波束成形濾出。將所建立好的演算法置 入模組內,以選擇方式呼叫模組來使用。其中方位估測法分別有 MUSIC 和 MVDR 掃 描的模組,而在波束成形器中有 MVDR、Frost Adaptive Beamformer、改變架構後的. G-J、Adaptive 加入 pilot 可選擇。. 25.
(36) 4-2 建立函式庫 將模擬時需要建構訊號、環境和接收後的後續處理,包括:訊號處理、演算法… 等。利用 MATLAB/SIMULINK 建出所需要的陣列訊號模擬的函式庫,以 MODEL. BOWSER[13]建立 TOOLBOX 的方式,建立出系統裡需要的元件做為模擬此環境所需 要的函式庫,模擬系統時以嵌入的方式來使用這些元件,可讓自己的環境在架構上修 改多了便利性。. 圖 4- 6:陣列訊號處理函式庫. 將函式庫內的方塊做區分,可分為元件和模組兩大類如上圖,其中函式庫內的元 件是為了配合系統需求所建立的輔助工具,如輻射場的取樣、移動模擬和參考者座標 與地球坐標的轉換的方塊,而函式庫中的的模組的建構是利用我們所建立的元件方塊 輔助設計而成的,建立好的模組方塊可由函式庫內直接複製到程式中再呼叫 configure. subsystem 中所想要的情境以建檔模擬所想要情境。 26.
(37) 4-3 以匯流排(BUS)傳輸. 將模組元件內資料的傳輸方式皆以匯流排(BUS)當傳輸線,如圖 4-3 是將陣列感測 器內的移動資料、位置、擺放方式和周圍的天線輻射場,將陣列的所有的資料匯整成. Parray 的 BUS 成為輸出,故將資料線都先命名在匯入 SIMULINK 元件 BUS Creator 內,在利用 BUS Selector 選擇輸出的資料,可將資料作有規劃的分類,本文中匯流排 傳輸的資料作分類:目標物(target)、感測器(sensor)、環境參數。將資料分成這三類傳輸 到接收陣列模組(receiver array model),將傳輸資料有效的組織和整合,使得在使用模 組上相當便利並減少複雜的牽線,在使用時只需以串接和並接方式就可模擬複雜之建 檔情形。. 4-4 模型驗證 (一)目標移動模型: 下圖 4-6 為模擬目標物移動,利用正弦函數作為移動,向量從[-500 -500 0]以 S 形 方式沿[1 1 0]之方向移動。. 圖 4- 7:目標移動. 27.
(38) (二)都卜勒效應 都卜勒效應(Doppler)是波源和觀察者有相對運運動時,觀察者接受到波的頻率與 波源發出的頻率並不相同的現象。觀測者對於波的行進速度感到有所改變,是由於波 源和觀測者間的相對移動速度所造成的,波長不會改變,因此影響到觀測者所接收到 頻率和波源的頻率會有所不同,而造成頻率頻移的現象(Doppler shift)。考慮一個以等 速 v 作直線運動的聲源,可定義聲源速度和聲速比為馬赫數 M(Mach number)亦即: M . v c. (4-4). 都卜勒效應公式如下: f . 1 f0 1 M cos . (4-5). f :為觀察者頻率. f :為訊號頻率. :為觀測者的方向 因此當兩者間之相對運動為波源向觀測者移動時,由原本頻率會移向頻率較高的 地方;若遠離時則反之。 下圖 4-7 為目標物朝向感測器以 60 (km/hr)移動時,其聲源波速為 1500 (m/s)所產 生的都卜勒效應(Doppler),由原本的 1khz(黑線)移向頻率 1.011 khz 的位置(紅線)。. 28.
(39) 圖 4- 8:都卜勒效應. (三)簡易方位估測 將訊號皆延遲至所要觀測角度再以等權重相加,需計算所有感測器接收到訊號的 延遲時間與參考時間差,再利用 BUFFER 來將所接收的訊號作儲存,將時間差輸入. BUFFER 內,將所有感測器所接收的訊號延遲到所的觀測角度上,做出掃描的效果。 下圖 4-8 為利用環狀陣列所估測出的方位圖,以感測器為中心目標物靜置於[1000. 1000 0]的位置,增益值最大增益再 45 度時。. 29.
(40) 圖 4- 9:簡易方位估測. (四)陣列訊號處理 兩個訊號分別靜置於 30 度和-70 度,其頻率分別為 995Hz 和 1005Hz,以 MUSIC 為方位估測演算法先估測出方位角(圖 4-9),再將所估得方位角,以 MVDR 為架構之 波束成形器濾出所估測角度(圖 4-10)。. 30.
(41) -70 度. 30 度. 圖 4- 10:MUSIC 方位估測. 1005 995. 雜訊消除位置-7dB. 圖 4- 11:Griffiths-Jim version of the Frost 波束成形器. 31.
(42) 第五章 模擬系統應用與驗證 本章主要是將上一章所建立之函式庫之模組,應用在模擬真實情境,將水中對多 船舶(目標物)時和多陣列之水中複雜場景如何來建檔,在以所建檔之情境來模擬以驗 證所建立之模擬系統。. 5-1 模擬系統之建檔方式 一個目標物(target)經過環境通道(environment)到達一組陣列感測器作陣列訊號處 理,如圖 5-1。 Parray. array. arrayBin In1. arrayBout Ptarget. target. sourceIC. Out1. Target. target. rceivr array model. 0_env_ideal. beamformed 0_by SUM. 圖 5- 1:一目標物和一陣列之建檔示意圖. 加入目標物後經過各自通道到達同一組陣列感測器。目標物增加以串接 receiver. array model 就可以達到模擬多個目標物之環境,如圖 5-2。 Parray. array1. arrayBin arrayBout. Ptarget. target. sourceIC. target1 0_env_ideal. arrayBin. Target. arrayBout. rceivr array model1. In1. Out1. Target. rceivr array model2. beamformed1 0_by SUM. Ptarget. target. sourceIC. target2 0_env_ideal. 圖 5- 2:兩目標物和一陣列之建檔示意圖. 32.
(43) 增加陣列以多個目標物和多個陣列方式為模擬情境, Parray. array1. array Bin array Bout. PathNo.=1 Ptarget. target. sourceIC. target1. Target. array Bin. rceivr array model env _dopp Parray. array Bin. array Bout. Out1. Target. rceivr array model1. beamformed by delay SUM2. array Bout. array2. In1. Target array Bin. PathNo.=1 Ptarget. target. sourceIC. rceivr array model2. array Bout. In1. Out1. Target. target2 env _dopp. rceivr array model3. beamformed1 by delay SUM2. 圖 5- 3:兩目標物和兩陣列之建檔示意圖. 5-2 模擬情境與驗證 模擬目標物數目:2. target1 以時速 60 km/hr,以感測器為起始位置為[500 0 0]沿方向向量[-1 0 0]方向 直線前進。target2 時速 60km/hr,以感測器為起始位置[200 -500 0]沿方向向量[1 1 0] 方向直線前進。 模擬陣列數目:2(環狀陣列和線陣列) 感測器:64 環狀陣列和線陣列擺放的中心位置相同,環狀陣列感測器所面對之方向[0 1 0] , 線陣列感測器所面對之方向[1 0 0] 模擬時間 30 秒 目標物模擬:. target1 以時速 60km/hr,以感測器為起始位置為[500 0 0]沿[-1 0 0]方向直線前進, 30 秒後其方位在[500 500 0]的位置。. 33.
(44) 圖 5- 4:target1 移動路徑圖. target2 時速 60km/hr,以感測器為起始位置[200 -500 0]沿[1 1 0]方向直線前進,30 秒後其方位在[553 -147 0]的位置。. 圖 5- 5:target2 移動路徑圖 線陣列感測器模擬: 線陣列感測器已[1 0 0]為參考向量,能估測順、逆時鐘 0 到 90 度,30 秒後利用環 狀陣列感測器,所估得再-90 度與 15 度皆有訊號峰值 。. 34.
(45) 圖 5- 6:目標物與線陣列角度關係. 圖 5- 7:線陣列掃描角度 環狀陣列感測器模擬: 環狀陣列感測器已[0 1 0]為參考向量,能估測順、逆時鐘 0 到 180 度,30 秒後利 用環狀陣列感測器,所估得再 0 度與 105 度皆有峰值。. 35.
(46) 圖 5- 8:目標物與環狀陣列角度關係圖. 圖 5- 9:環陣列掃描角度. 36.
(47) 第六章 適應性陣列系統模擬及分析 6-1 導引量化誤差. 將訊號導引延遲至 0度. 圖 6- 1:導引延遲示意圖 在波束形成器中先將每個陣列感測器導引至 0 度,因此需要補償每個感測器的延 遲時間而補償的延遲時間,由傅利葉級數可以得知任何的函數訊號皆可由正弦和餘弦 函數所組成,因此將訊號視成餘弦函數來做推導量化誤差,而導引的量化誤差與訊號 有關假設與空間中的雜訊無關,其感測器的接收訊號如下式:. cosωt t d . (6-1). t d 是由陣列導引至 0 度所需要的延遲時間計算 而實際上 t d 所計算出要延遲的時間,與系統的取樣率有關係,若系統取樣率太低 時,無法將導引延遲的時間全部取出,而會與實際的延遲時間產生誤差,其經取樣之 量化(取樣點, t nTs )帶入訊號中,其式如下: t t d d Ts Ts Ts . (6-2). Ts 為系統的取樣週期, Ts 為未取樣到的時間 37.
(48) 若假設未取樣到的時間差量為均勻分佈的,. 1 1 Ts T ~ T 2 2. (6-3). 將實際延遲後的訊號視為. t cos ωt d Ts Ts Ts . (6-4). 其延遲時間量化後為. t cos ωt d Ts Ts . (6-5). 量化雜訊為. t t cos ωt d Ts cos ωt d Ts Ts Ts Ts . (6-6). 量化雜訊功率 1 Qn Tb. 2. cos ωt t d Ts cos ωt t d Ts Ts dt Ts Ts 0. Tb. 2. cos ωt t d Ts cos ωt t d Ts cos Ts sin ωt t d Ts sinTs dt Ts Ts Ts 0 1 cos TS 1 Tb. Tb. (6-7) Qn 為量化雜訊功率,將 cosTS 利用泰勒展開式 Qn . Ts 2 Ts 4 Ts 6 Ts 8 2! 4! 6! 8!. (6-8). 由於訊號頻率超過百赫茲,因此取樣率至少取到千赫茲以上,因此近似於展開式. 1階 Qn . E[Ts 2 ] Ts 2 Ts 2 , E[Qn ] 2 2 12. (6-9). 38.
(49) 其導引量化誤差 SNR 值為 SNR . 0 .5 12 0.5 6 2 2 E[Qn ] Ts Ts. (6-1 0) Ts 為系統之取樣周期,若加入內差法則為所加入內差法之最大解析度。 將導引量化誤差降低,可將系統取樣提高或在導引延遲後做分數延遲,但若系統 取樣提高 buffer 的量會增加系統運算量也相對提高,而利用內插法作為分數延遲,其 解析度要提高需增加內插之點數,下表分別為提高取樣率與內插法,兩者之解析度相 同,而提高取樣率的方法,系統取樣與內差法之系統取樣差了十倍,但其運算量較高 故在模擬時所耗時間與內差法差了近十倍。 方法. 系統取樣. 誤差. 模擬時間 1 秒. 無. 10k. 6×1e-2. 0.106. 線性內插. 10k. 6×1e-4. 0.102. 提高取樣. 100k. 6×1e-4. 0.009. 表 6- 1:模擬 8 個 sensor 之導引延遲比較表. 39.
(50) 取樣 10Khz. 取樣 100Khz. 提高系統取樣,導引延遲後的訊號 圖 6- 2:提高取樣的訊號. 未加入分數延遲. 加入分數延遲. 系統取樣為 10KHz 時,導引延遲後的訊號 圖 6- 3:加入分數延遲的訊號. 40.
(51) 6-2 方位估測比較 以本系統中的 MVDR 和 MUSIC 皆取 1000 點來做分析,由於 MVDR 為框架結構, 其用途並非方位估測法為波束成形器,因此其解析度較一般方位估測法低,(圖 6-4) 假設雜訊為分布均勻的亂數訊號以高斯白雜訊模擬,兩訊號皆為 SNR7dB,當 MVDR 在訊號相差 10 度時其峰值還可分出 30 度和 40 度,但在相差 7 度(圖 6-5)時 MVDR 已 無法分辨訊號而 MUSIC 仍可以明顯分便兩訊號之峰值。 S MUSIC . 1. a H θ E N E H N aθ . (6-1 1) S MVDR 0 . 1 a (θ 0 )R XX 1a(θ 0 ) H. (6-1 2) 其中 R XX. 1. 為 R xx. 1. M. i 1. 1. i. E i E iH. 由 MUSIC(6-11)和 MVDR(6-12)式中,兩個式子很相似,MUSIC 是以雜訊子空間 和導引向量之倒數,當掃描至訊號角度兩者正交時其倒數將會大幅增加,因為將訊號 子空間和特徵值提出所以其值和訊號功率大小並無絕對關係,而 MVDR 是將反矩陣與 導引向量帶入,由於使用反矩陣並未取出雜訊或訊號子空間,由下式可得知其訊號子 空間和特徵值並未被取出,因此其值與訊號會有相對關係,如圖 6-6 當 40 度訊號功率 減少 6dB 上圖 MUSIC 並未有明顯減少,而下圖的 MVDR 卻有明顯的下降,因此當. MVDR 掃描角度所得到的振幅大小關係與訊號大小有相對關係,而 MUSIC 無此種特 性。. 41.
(52) MUSIC. MVDR. 30. 30. 40. 40. 圖 6- 4:MUSIC 和 MVDR 掃描相差 10 度. MUSIC. 33. MVDR. 圖 6- 5:MUSIC 和 MVDR 掃描相差 7 度. 42. 40.
(53) MUSIC. 峰值下降. MVDR. 圖 6- 6:MUSIC 和 MVDR 掃描減少功率 6dB. 6-3 波束成型器模擬比較 (一)模擬目標移動 模擬狀態說明: 以所建立之函式庫建檔模擬環境比較波束成形器,有一組陣列中有 8 個感測器以 頻率 1000Hz 擺放為線性陣列面向[1 0 0]方向,有水上兩目標物 target1 功率 0.5 頻率. 995 Hz 與參考向量[1 0 0]呈 40 度角與陣列距離 500 公尺,以時速 30 公里向[2 1 0]方向 移動,target2 功率 0.5 頻率 1005 Hz 與參考向量[1 0 0]呈-30 度角與陣列距離 1000 公尺, 以時速 40 公里向[1 -3 0]方向移動,其通道假設每 15 公里衰減 5dB,假設其通道雜訊 為白雜訊,加入功率 0.1 之高斯白雜訊為通道雜訊,先以方位估測法找出陣列與訊號 之角度,再由角度以波束成形濾出雜訊擷取訊號,分別以框架式結構的 MVDR 和 Frost. Adaptive 所濾出之訊號與未用波束成形器之訊號作比較。. 43.
(54) [A]. Parray. In1. array1 array Bin target. only signal. array Bout. PathNo.=2 Ptarget. Out2. Goto. sourceIC. target1. Target. rceivr array model env _dopp. array Bin array Bout. In1. Out1. In1. Out1. In1. <tobeam>. Target. rceivr array model1. AWGN noise. DOA. tobeamformer. MUSIC. MVDR. PathNo.=2 Ptarget. target. sourceIC In1. target2. tobeam. env _dopp. tobeamformer2 FROST. 圖 6- 7:情境一模擬多目標移動之建檔圖 結果分析比較:. Target1 移動 5 秒路徑圖. Target2 移動 5 秒路徑圖. 圖 6- 8:情境一移動 5 秒路徑圖 在 5 秒時,如上圖與陣列置於原點與各目標相對移動路徑,黑點為起始位置紅點 為 5 秒後位置,Target1 位置與陣列參考向量呈 37 度,Target2 位置與陣列參考向量呈. -27 度,以 MUSIC 為方位估測掃描其峰值分別在-27 和 36 度。. 44.
(55) 5 秒時 MUSIC 掃描角度圖 圖 6- 9:情境一 5 秒時 MUSIC 掃描角度圖. Target1 移動 15 秒路徑圖. Target2 移動 15 秒路徑圖. 圖 6- 10:情境一移動 5 秒路徑圖 在 15 秒時,如上圖與陣列置於原點與各目標相對移動路徑,黑點為起始位置紅點 為 5 秒後位置,Target1 位置與陣列參考向量呈 28 度,Target2 位置與陣列參考向量呈. -20 度,以 MUSIC 為方位估測掃描其峰值分別在-26 和 37 度。. 45.
(56) 15 秒時 MUSIC 掃描角度圖 圖 6- 11:情境一 15 秒時 MUSIC 掃描角度圖. 15 秒時未波束成形之訊號 圖 6- 12:情境一 15 秒時未波束成形之訊號 利用波束成形器將所估測方位角的訊號濾出,分別將 36 和-20 度訊號濾出,利用. MVDR 和傳統的適應性訊號處理架構來模擬,MVDR 和 Frost adaptive 其背景雜訊下. 46.
(57) 降約 8dB,但其主要消除其他方位角的訊號,如下圖都兩者皆能準確地將訊號濾出其 他角度之訊號,將其非估測角之訊號消除約 30 dB,其雜訊消除效果分別與 adaptive 收斂係數和 MVDR 之框架大小有關係,而在本次模擬情境中在消除其他方位角之雜訊 效果相差不大,而後面的模擬皆使用 MVDR 來做模擬。. 995Hz. MVDR. 995Hz. Frost Adaptive 1005Hz. 1005Hz. 36 度所濾出之頻譜 圖 6- 13:36 度所濾出之頻譜. 47.
(58) Frost Beamformer. MVDR 1005Hz. 1005Hz. 995Hz. 995Hz. -20 度所濾出之頻譜 圖 6- 14;-20 度所濾出之頻譜. (二)模擬多個陣列移動 Parray. array1 array Bin Ptarget. target. In1<tobeam>. array Bout. PathNo.=2 sourceIC. target1. array Bin. Target. rceivr array model env _dopp. tobeamformer array Bout. array Bout. sourceIC. env _dopp. Out1. MVDR. DOA. AWGN noise. In1. rceivr array model2. Out2. MUSIC. signal array Bin. Target. target2 Parray. In1. array Bin. PathNo.=2 target. Out1. Target. rceivr array model1. Ptarget. In1. array Bout. In1. Out1. In1. Out1. In1<tobeam>. Target. rceivr array model3. AWGN noise1. DOA1. tobeamformer1. MUSIC. MVDR. array2 In1. Out2. signal1. 圖 6- 15:情境二模擬多陣列移動之建檔圖 模擬狀態說明:. 48.
(59) 兩組移動陣列於相同位置皆各有 8 個感測器,Array1 以頻率 1000Hz 擺放為線性 陣列面向[1 0 0]方向,以時速 40 公里向[2 -1 0]方向移動。Array2 以頻率 1000Hz 擺放 為環狀陣列面向[0 1 0]方向,以時速 30 公里向[-3 4 0]方向移動。假設水上有兩目標物. Target1 功率 0.5 頻率 995 Hz 與參考向量[1 0 0]呈 24 度角靜置於陣列距離 700 公尺, Target2 功率 0.5 頻率 1005 Hz 與參考向量[1 0 0]呈-35 度角靜置於陣列距離 1000 公尺, 其通道假設每 15 公里衰減 5dB,假設其通道雜訊為白雜訊,加入功率 0.1 之高斯白雜 訊為通道雜訊。 結果分析比較:. 多陣列相對移動 5 秒路徑圖 圖 6- 16:情境二多陣列相對移動 5 秒路徑圖 有相同的感測器數目但擺放方式不同,其環狀陣列和線陣列孔徑大小也會有所差 異,陣列數目相同線而陣列孔徑較大,且陣列越多時孔徑相差越大,但是線陣列只能. 49.
(60) 估測參考向量正負 90 度環狀陣列能估測參考向量正負 180 度,故在相同的感測器數目 模擬中的波束成形上線陣列的效果理應優於環狀陣列。 在 5 秒時,如上圖與陣列置於原點與各目標相對移動路徑,黑點為起始位置紅點 為 5 秒後位置,Target1 位置與線陣列參考向量呈 24 度,與環狀陣列呈 115 度,Target2 位置與陣列參考向量呈-38 度,與環狀陣列呈 57 度,以 MUSIC 為方位估測掃描線陣 列其峰值分別在-38 和 24 度,環狀陣列其峰值分別在 57 和 115 度。. 線陣列. 環狀陣列. 5 秒時方位估測 圖 6- 17:情境二 5 秒時方位估測. 15 秒時,如下圖與陣列置於原點與各目標相對移動路徑,黑點為起始位置紅點為 15 秒後位置,Target1 位置與線陣列參考向量呈 23 度,與環狀陣列呈 114 度,Target2 位置與陣列參考向量呈-44 度,與環狀陣列呈 62 度,以 MUSIC 為方位估測掃描線陣 列其峰值分別在-44 和 23 度,環狀陣列其峰值分別在 62 和 118 度。. 50.
(61) 多陣列相對移動 15 秒路徑 圖 6- 18:情境二多陣列相對移動 15 秒路徑. 線陣列. 環狀陣列. 15 秒時方位估測 圖 6- 19:情境二 15 秒時方位估測 51.
(62) 線陣列. 環狀陣列. 15 秒時波束成形前之訊號 圖 6- 20:情境二 15 秒時波束成形前之訊號. 線陣列. 995Hz. 1005Hz. 995Hz. 1005Hz. 23 度線和 118 度環狀之波束成形 圖 6- 21:情境二 23 度線和 118 度環狀之波束成形. 52. 環狀陣列.
(63) 995Hz. 線陣列. 1005Hz. 1005Hz. 995Hz. 環狀陣列. -44 度線和 62 度環狀之波束成形 圖 6- 22:情境二-44 度線和 62 度環狀之波束成形. 15 秒時以波束成形器將所估測方位角的訊號濾出,分別將線陣列-44 和 23 度訊號 995Hz 與環狀陣列 62 和 118 度訊號 1005Hz 濾出,在線陣列對 23 度作波束成形將 1005Hz 之訊號消至相差 25dB,環陣列 118 度和 62 度約相差 20dB,在-44 度時線陣列 消除其他角度之雜訊有約 30dB,與理論上孔徑較大者之波束成形之效果較佳一致。. (三)模擬多陣列、多目標移動. 53.
(64) Parray. array1. array Bin array Bout. PathNo.=2 Ptarget. target. sourceIC. Target array Bin. target1. rceivr array model env _dopp. In1 <tobeam> array Bout. Target. array Bin. target. sourceIC. In1 Out1. In1. AWGN noise. array Bin. rceivr array model2. env _dopp. Target. rceivr array model3. DOA. In1. signal. array Bin array Bout. In1 <tobeam>. Target array Bin. PathNo.=2 Ptarget. target. Out2. MUSIC. array Bout. target2. MVDR. Out1. Target. PathNo.=2 Ptarget. tobeamformer array Bout. rceivr array model1. rceivr array model4. array Bout. In1 Out1. In1. Out1. tobeamformer1 MVDR. Target. sourceIC. AWGN noise1. target3. rceivr array model5. env _dopp. DOA1 MUSIC. In1. Out2. signal1 Parray. array2. 圖 6- 23:情境三模擬多陣列、多目標移動之建檔圖 模擬狀態說明: 模擬兩組移動陣列皆各有 8 個感測器和三個移動目標,Array1 以頻率 1000Hz 擺 放為線性陣列面向[1 0 0]方向,以時速 40 公里向[2 -1 0]方向移動。Array2 以頻率. 1000Hz 擺放為環狀陣列面向[0 1 0]方向,以時速 30 公里向[-3 4 0]方向移動。假設水 上有兩目標物 Target1 功率 0.5 頻率 995 Hz 與參考向量[1 0 0]呈-175 度角靜置於陣列距 離 800 公尺,Target2 功率 0.5 頻率 1005 Hz 與參考向量[1 0 0]呈-50 度角陣列距離 1000 公尺,Target3 功率 0.5 頻率 990 Hz 與參考向量[1 0 0]呈 34 度角靜置於陣列距離 700 公尺,其通道假設每 15 公里衰減 5dB,假設其通道雜訊為白雜訊,加入功率 0.1 之高 斯白雜訊為通道雜訊。 結果分析比較:. 54.
(65) -. 5 秒多陣列、多目標相對移動路徑圖 圖 6- 24:情境三 5 秒多陣列、多目標相對移動路徑圖. 5 秒時,如上圖 6-24 與陣列置於原點與各目標相對移動路徑,黑點為起始位置紅 點為 5 秒後位置, Target1 位置與線陣列參考向量呈-173 度,與環狀陣列呈-86 度,. Target2 位置與陣列參考向量呈-50 度,與環狀陣列呈 62 度,Target3 位置與線陣列參. 55.
(66) 考向量呈 23 度,與環狀陣列呈 114 度,如下圖 6-25 以 MUSIC 為方位估測掃描線陣列 其峰值分別在-50、-7 和 31 度,環狀陣列其峰值分別在-86、45 和 112 度,由於線陣 列無法估測大於參考向量正負 90 度,而-173 度的訊號超出估測範圍而被誤判成-7 度。. 線陣列. -173 度之訊號誤判. 環狀陣列. 5 秒時方位估測 圖 6- 25:情境三 5 秒時方位估測. 5 秒時波束成形前之訊號. 56.
(67) 圖 6- 26:情境三 5 秒時波束成形前之訊號. 995Hz. 1005Hz. 線陣列. 990Hz. 1005Hz. 995Hz. 環狀陣列. 990Hz. 5 秒時-7 度線和-86 度環狀之波束成形 圖 6- 27:情境三 5 秒時-7 度線和-86 度環狀之波束成形. 線陣列. 995Hz. 1005Hz. 990Hz. 1005Hz. 995Hz 990Hz. 5 秒時-50 度線和 45 度環狀之波束成形. 57. 環狀陣列.
(68) 圖 6- 28:情境三 5 秒時-50 度線和 45 度環狀之波束成形. 995Hz 1005Hz. 線陣列. 990Hz. 1005Hz. 995Hz. 環狀陣列. 990Hz. 5 秒時 31 度線和 122 度環狀之波束成形 圖 6- 29:情境三 5 秒時 31 度線和 122 度環狀之波束成形 對 5 秒時估測的角度利用波束成形器來對將訊號擷取,線陣列所濾出的訊號如上 圖 6-29 分別將所模擬的訊號 990、995 和 1005Hz 訊號濾出,線陣列將所估測角度的訊 號濾出,而利用環陣列模擬波束成形前所擷取的訊號,由於其孔徑大小較線陣列小的 關係,其訊號間干擾情形嚴重,其 122 度需濾出 Target3 的頻率 990Hz,但受到其他角 度訊號干擾所濾出的最大頻率為 995Hz 為 Target1 訊號。. 15 秒時,如下圖與陣列置於原點與各目標相對移動路徑,黑點為起始位置紅點為 15 秒後位置,Target1 位置與線陣列參考向量呈-168 度,與環狀陣列呈-85 度,Target2 位置與陣列參考向量呈-50 度,與環狀陣列呈 56 度,Target3 位置與線陣列參考向量呈. 24 度,與環狀陣列呈 119 度,以 MUSIC 為方位估測掃描線陣列其峰值分別在-50、-12 和 24 度,環狀陣列其峰值分別在-91、56 和 119 度,其中線陣列只有正負 90 度而-168 度的訊號超出估測範圍而誤判成-12 度。. 58.
(69) 15 秒多陣列、多目標相對移動路徑圖 圖 6- 30:情境三 15 秒多陣列、多目標相對移動路徑圖. 59.
(70) 線陣列. -168 度誤判. 環狀陣列. 15 秒時方位估測 圖 6- 31:情境三 15 秒時方位估測. 15 秒時波束成形前之訊號 圖 6- 32:情境三 15 秒時波束成形前之訊號. 60.
(71) 995Hz. 1005Hz. 990Hz. 1005Hz. 995Hz 990Hz. 15 秒時-50 度線和 56 度環狀之波束成形 圖 6- 33:情境三 15 秒時-50 度線和 56 度環狀之波束成形. 995Hz. 1005Hz. 990Hz. 1005Hz. 995Hz 990Hz. 15 秒時-12 度線和-91 度環狀之波束成形 圖 6- 34:情境三 15 秒時-12 度線和-91 度環狀之波束成形. 61.
(72) 995Hz 1005Hz. 990Hz. 1005Hz. 995Hz 990Hz. 15 秒時 24 度線和 119 度環狀之波束成形 圖 6- 35:情境三 15 秒時 24 度線和 119 度環狀之波束成形 在 15 秒時估測的角度利用波束成形器來對將訊號擷取,線陣列所濾出的訊號分別 將所模擬的訊號 990、995 和 1005Hz 訊號濾出,但在度 990Hz 卻未明顯消下,而環狀 陣列也在度 990Hz 也未消下。. (四)結論 在本節中將所假設之模擬環境建檔,如線陣列無法判別大於 180 之訊號,而有誤 判的情形,波束成型之效果與孔徑大小之關係一致,故驗證了本系統所架構後的模擬 情境之正確性,而在方便性上將函式庫內的所要使用的模擬模組直接拖曳到程式中, 設定參數及選定使用的模組後,就可達到同時模擬多個波束成形器之效果。因此在建 構模擬環境時,使用本文所建之函式庫只需要透過串接 receiver array mode,在許多複 雜的情境都可以很容易的模擬,以本節所模擬之第三種情境 2 組移動陣列 3 個移動目 標為例,建檔所需花費時間為 10 餘分鐘即可。. 62.
(73) 第七章 結論與未來展望 本論文建立陣列訊號處理之函式庫,配合 configure subsystem 的使用建立模組, 使函式庫在使用上更為便利和完整,將匯流排之概念應用在陣列傳輸上,減少在方塊 圖程式撰寫時連接時,所造成的拉線過於複雜。而在模擬陣列訊號處理時,在多個目 標訊號模擬方面,只需要以串接方式即可產生出所需要的多個目標物環境,在分析不 同的波束成行器或是陣列時需模擬多種陣列或多種陣列訊號處理器只須將所要之方塊 嵌入程式中在選擇所要使用模組,在使用上相當便利且也容易建立出複雜的模擬系統。 本論文之研究貢獻如下:. (一) 基本陣列分析之成果 在方位估測上使用環狀陣列與線性陣列以 delay and sum 展示其估測範圍,也以掃 描 MVDR 和 MUSIC 之方法作分析,以提高取樣率和利分數延遲比較對於導引延遲所 造成之量化誤差,在波束成形器上使用了 Adaptive Frost Beamformer 和 MVDR 作簡易 之比較。. (二) 設計各種陣列訊號處理之模組程式庫 建立了多種模組,目標訊號(Target) 模組中設計多種訊號源、訊號源的位置設定、 目標移動方式設定、目標之取樣輻射場設定。陣列(Array)模組設計多種陣列的擺放方 式和方向、感測器數目設定、陣列的位置、陣列的移動方式、陣列之取樣輻射場設定。 環境模組中設計了都普勒和多種不同通道特性、通道延遲時間和衰減的設定。接收陣 列模組(receiver array model)將目標、陣列和環境三者之設定模擬出實際數值。方位估 測法(DOA)模組中設計了 MVDR 和 MUSIC,波束成形器(Beamformer)模組中有 MVDR 和多種適應性波束成形器。. (三) 應用模組函式庫建構陣列訊號處理之分析平台 63.
(74) 將函式庫中模組建檔來模擬多種情境和陣列訊號處理模組,達到陣列訊號處理之 分析。. (四) 經由模擬驗證所建構之平台的正確性及方便性 模擬許多假設情境以方位估測法正確估出訊號再以波束成形擷取出訊號之正確頻 率,在建構平台以串聯方式可模擬多個目標物,並聯方式可模擬多個陣列,配合. configure subsystem 可簡單的選擇模擬情境,在建構模擬平台時只需花數分鐘即可。 對於本系統之未來展望,雖然已經有基本的架構且在使用上也相當便利,其系統 還可加強從二維變為三維,模組中還可以加入寬頻訊號和許多實際的通道特性,處理. Desired signal cancellation 效應,故在演算法方面方位估測及波束成形器還可加強或加 入新的演算法,如:訊號子空間演算法及空間平滑法…等,使系統更完整及更多元性。. 64.
數據

![圖 1- 1:海上船舶場景 如上圖 1-1 假使船舶在行進間對於水上航行目標物估測其方位,船的聲源所產生 之訊號經過通道,在使用多個感測器做訊號接收,在將接收後的訊號做陣列訊號處理, 天線陣列訊號處理[15]的技術主要分為波束成型器(Beamforming) [15]與方位估測 (Direction Of Arrival)[23]兩大主題,波束成型器是設計一個空間濾波器(Spatialfilter) [11],保留我們想要的訊號,抑制干擾源。方位估測(Direction Of Arrival)主要在於](https://thumb-ap.123doks.com/thumbv2/9libinfo/8960864.277229/12.892.108.781.100.967/如上圖號處天線陣列訊號處理技術計一個空間訊號抑制干擾源方在於.webp)

+7

![圖 4- 8:都卜勒效應 (三)簡易方位估測 將訊號皆延遲至所要觀測角度再以等權重相加,需計算所有感測器接收到訊號的 延遲時間與參考時間差,再利用 BUFFER 來將所接收的訊號作儲存,將時間差輸入 BUFFER 內,將所有感測器所接收的訊號延遲到所的觀測角度上,做出掃描的效果。 下圖 4-8 為利用環狀陣列所估測出的方位圖,以感測器為中心目標物靜置於[1000 1000 0]的位置,增益值最大增益再 45 度時。](https://thumb-ap.123doks.com/thumbv2/9libinfo/8960864.277229/39.892.105.776.89.1005/三簡易方接收訊號延遲到所觀測角度上做出掃描的效果下圖用環度時.webp)

Outline
相關文件
3.丙級:包括應用作業系統、安裝軟體與使用電腦週邊設 備、設定繪圖環境、控制圖形螢幕、輸出圖形與 管理圖面等基本工作及繪製單件立體圖、立體剖
在數位系統中,若有一個以上通道的數位信號需要輸往單一的接收端,數位系統通常會使用到一種可提供選擇資料的裝置,透過選擇線上的編碼可以決定輸入端
一方面運用如來藏思想,一方面顯示根本空義,並在此基礎上建立起更為直截的成佛學說和
說明: 設原立方體的邊長為 1,要作出的立方體邊長為 x,則 x 要滿足 ,這個方 程式沒有有理根,當然就沒有尺規作圖的 x 了。.
選擇 選擇Clustering所需的 所需的 所需的 所需的 input pattern..
(當短片提及中秋節後,展示燈籠)在片 段中看到什麼食物?月餅(提供圖片讓學 生選擇)(初步建立中秋節、燈籠和月餅
Excel VBA 乃是以 Visual Basic 程式語言為基礎,提供在 Excel 環境中進 行應用程式開發的能力。在 Excel 環境中「Visual Basic 編輯器」提供了一個
近年來世界各主要國家,莫不致力於顧客滿意指標,以作為產業競爭力的 評量指標。如:瑞典首先在 1989 年建立包含 31 項產業的瑞典顧客滿意度氣壓 計(Fornell,
