行政院國家科學委員會專題研究計畫 成果報告
子計畫三:以垂直正交分頻分碼多工調變為基礎之基地台接
收機架構之設計(I)(電信科技合作案)
計畫類別: 整合型計畫 計畫編號: NSC91-2219-E-009-020- 執行期間: 91 年 08 月 01 日至 92 年 07 月 31 日 執行單位: 國立交通大學電信工程學系 計畫主持人: 黃家齊 計畫參與人員: 黃朝旺,魏杏如,洪碩言,古孟霖 報告類型: 完整報告 處理方式: 本計畫可公開查詢中 華 民 國 93 年 2 月 3 日
發展軟體無線電技術(I):
智慧型天線系統/技術之研發
期末報告
整合型總計畫主持人: 彭松村教授
子計畫主持人: 黃家齊教授
本子計畫中文名稱:
以垂直正交分頻分碼多工調變為基礎之基地台
接收機架構之設計
本子計畫英文名稱:
A Study on Base Station Receiver Design for
OFDM/CDMA-based Cellular Mobile
Communications Systems
目錄 (Part 1: 多載波分碼多重進接系統
上鏈基頻接收機之設計與模擬)
第一章...1 1.1 多載波分碼多重進接(Multicarrier CDMA)系統...1 1.2 關於本論文...2 第二章...3 2.1 正交分頻多工系統...3 2.2 正交分頻多工/分頻多重進接 ...6 2.3 正交分頻多工/分時多重進接 ...7 2.4 正交分頻多工/分碼多重進接 ...8 第三章...10 3.1 單一用戶偵測...10 3.2 多用戶偵測...11 3.2.1 聯合偵測...12 3.2.1.1 最大可能序列估計...12 3.2.1.2 解相關偵測器...12 3.2.1.3 最小均方差偵測器...14 3.2.2 干擾消除...14 3.2.2.1 連續干擾消除...15 3.2.2.2 平行干擾消除...17 3.3 混合式多用戶偵測...18 第四章...19 4.1 傳送機架構...19 4.2 展頻碼...21 4.2.1 m-序列 ...21 4.2.2 華氏碼...22 4.2.3 金氏碼...23 4.3 通道模型...24 4.4 上鏈多用戶環境...25 第五章...27 5.1 接收機架構...27 5.2 通道估計...28 5.2.1 解展頻...295.2.2.1 路徑選擇...32 5.2.2.2 路徑解相關...33 5.3 領航訊號干擾消除...34 5.4 應用於頻域之多用戶偵測技術...35 5.4.1 第一級偵測器...35 5.4.2 第
s
級偵測器...37 5.4.3 通道匹配...38 5.4.4 資料決策...39 第六章...40 6.1 直接序列-分碼多重進接(DS-CDMA)系統之傳送機與接收機架構 ...40 6.2 模擬環境...41 6.3 模擬結果與討論...43 第七章...63 參考文獻...65
第一章
簡介
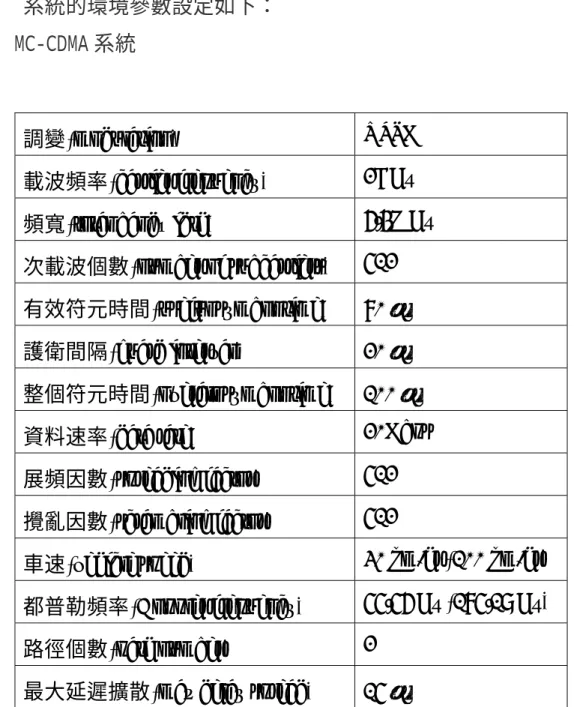
1.1 多載波分碼多重進接(Multicarrier CDMA)系統
未來第四代蜂巢式(cellular)行動通訊系統除了傳統的聲音和資料
傳輸之外,尚有多媒體影音服務,因此需要高速的傳輸速率。對於傳
統的分碼多重進接(Code Division Multiple Access, CDMA)系統,提高
位元傳輸率(Bit rate)將導致嚴重的符際干擾(Inter Symbol Interference,
ISI),而採用正交分頻多工(Orthogonal Frequency Division Multiplexing,
OFDM)調變能有效對抗 ISI,由於資料是放在不同的次載波(subcarrier)
上傳送,它能克服頻率選擇性衰減通道(Frequency selective channel)
的效應。目前
OFDM 技術已被廣泛應用於數位音響廣播系統(Eureka
147 DAB System)、數位影像傳播系統(DVB-T System)與無線區域網
路(Wireless LANs)如 802.11a、HYPERLAN-2 等。
OFDM 調變本身不具有多重進接(Multiple access)的能力,為了
因應蜂巢式行動通訊系統多重進接的需求,配合
CDMA 的使用,提
供其多重進接的能力,此即所謂多載波分碼多重進接
(Multicarrier
Code Division Multiple Access, MC-CDMA)。MC-CDMA 系統結合了
CDMA 與 OFDM 調變的優點,是第四代蜂巢式行動通訊系統熱門的
選擇。
1.2 關於本論文
本論文將設計一
MC-CDMA 系統上鏈(uplink)接收機架構,包含
了通道估計與多用戶偵測(Multiuser detection)技術的應用。論文各章
節內容簡述如下:第二章將描述
OFDM 傳輸技術的基本原理與系統
架構,並討論其與三種不同多重進接方式結合的可能性。在第三章
中,我們將不同的多用戶偵測技術加以分類並分別介紹之。第四章和
第五章提出一完整的
MC-CDMA 傳送機(transmitter)、接收機(receiver)
架構與通道模型(channel model),接著第六章為電腦模擬的結果,最
後在第七章提出結論並探討未來可能的研究方向。
第二章
基於正交分頻多工
(OFDM)之多重進接
方式
OFDM 技術降低了 ISI 對接收訊號的影響,具有高速的傳輸能
力,但必須配合分頻多重進接(Frequency Division Multiple Access,
FDMA)、分時多重進接(Time Division Multiple Access, TDMA)、分碼
多重進接(Code Division Multiple Access, CDMA)等多重進接方式,以
應用於多用戶的蜂巢式行動系統中。本章首先簡介
OFDM 調變技術,
接著分別對結合三種不同進接方式的
OFDM 系統:OFDM/FDMA、
OFDM/TDMA、OFDM/CDMA 做一說明。
2.1 正交分頻多工系統
傳統單一載波系統將所有的資料載在一個載波上送出,
OFDM 系
統則使用
N
個頻率正交的次載波以平行(parallel)的多工(multiplexing)
方式傳送較低速的資料,在相同的傳輸速率下,多載波系統由於整個
OFDM 符元(symbol)長度為原本的
N
倍,因此
OFDM 系統能忍受較
大的通道延遲,適用於頻率選擇性衰減通道。
k = 0 1 2 3 4
圖2.1 彼此正交之次載波功率頻譜密度
相 較 於 單 一 載 波 系 統 與 分 頻 多 工
(Frequency Division
Multiplexing, FDM),其相鄰的載波間不能互相重疊,OFDM 調變的
次載波功率頻譜密度(Power Density Spectrum, PSD)如上圖 2.1 所示,
每個次載波分佈於其他次載波頻率的成分為零,此即正交(orthogonal)
之性質。其中
N
是所有次載波的個數,
T
是整個
OFDM 符元時間,
彼此正交之次載波間距為
1 T
。由於
OFDM
系統允許次載波間的重
疊,因此擁有較佳的頻譜效率
(Spectral efficiency)
。
S/P Signal Mapper IDFT P/S Guard Interval Insertion D/A LPF Up Converter Channel Down Converter P/S Signal De-mapper DFT S/P Guard Interval Removal LPF A/D One-tap Equalizer Serial Data Input Serial Data Output x bits d(0) d(1) d(N-1) x bits 2.2 基於離散傅立葉轉換之 OFDM 系統
以震盪器產生
N
個彼此正交的次載波在實作上並不可行,而利用
反離散傅立葉轉換
(Inverse Discrete Fourier Transform
,
IDFT)
得以降低
硬體的複雜度實現
OFDM
系統。圖
2.2
是基於
DFT
之
OFDM
系統架
構圖。傳送端首先將高速的序列數位訊號經由序列轉並列
(Serial to
parallel)
轉換成
N
筆訊號,經過訊號對映
(Signal mapping)(
如
QPSK
對
映
)
,再把訊號放在不同的次載波上,接著藉由
IDFT
轉換成為時域訊
號並經過並列轉序列
(Parallel to serial)
轉換,最後加上一段護衛間隔
(Guard interval)
。每一個次載波上的接收訊號可視為經過一平緩衰減
通道
(Flat fading channel)
,因此接收端只需要一個簡單的等化器
(equalizer)
,再執行與傳送端相反的動作即可將信號還原。
Symbol M+1 IntervalGuard Symbol M IntervalGuard Symbol M-1
Symbol M+1 IntervalGuard Symbol M IntervalGuard Symbol M-1
1st Path
2nd Path
ISI Free Region
圖2.3 雙重路徑通道下之非 ISI 區
OFDM
系統中,將原符元後端部分複製至符元之前,即所謂護衛
間隔,一般選擇護衛間隔長度為原符元長度的四分之一。護衛間隔的
放 置 使 得 接 收 端 取 樣 結 果 等 於 通 道 脈 衝 響 應
(Channel impulse
response)
和符元的環旋積
(Circular convolution)
,
DFT
轉換後相當於通
道頻率響應
(Channel frequency response)
與符元的乘積。假設護衛間隔
長度大於通道延遲,只要在非符際干擾區
(ISI free region)
內取樣
(
上圖
2.3)
,由於在時域上之循環位移
(Cyclic shift)
等效於頻域上之線性的相
位位移
(Phase shift)
,此相位位移在通道匹配中補償
(compensate)
後,
仍可將訊號還原。但護衛間隔長度如果小於通道延遲,則
ISI
對訊號
OFDM
系統面臨的挑戰為其輸出訊號的峰值對平均功率比例
(Peak to Average Power Ratio
,
PAPR)
太高,造成射頻
(Radio frequency,
RF)
傳送機與功率放大器
(Power amplifier)
的設計複雜度提高,功率效
率降低。在高移動性
(mobility)
的應用環境下,次載波間難以維持正交
的關係,將導致交互載波干擾
(Inter Carrier Interference
,
ICI)
的產生。
此外,些許的頻率偏移將破壞次載波間的正交性,所以
OFDM
系統
對於頻率同步的要求非常嚴格。
2.2 正交分頻多工/分頻多重進接
正交分頻多工
/
分頻多重進接
(OFDM/FDMA)
亦稱為正交頻率多
重進接
(Orthogonal Frequency Division Multiple Access
,
OFDMA)
。此
系統將所有次載波分配給不同的用戶使用,利用
OFDM
次載波間彼
此正交的特性區分不同用戶的訊號。應用於無線都會網路
(Wireless
Metropolitan Area Network, WMAN)
的
IEEE 802.16
採用
OFDMA
方
式,我們以
IEEE 802.16
為例說明各用戶使用次載波的分配原則
[3]
。
. . . .
Subcarrier
Group 1 Group 2 Group 3 Group NG
Pilot subcarreir Subchannel A Subchannel B
IEEE 802.16
中共使用
2048
個次載波,為了緩和頻率選擇性衰減
通道的效應,單一用戶將不使用連續相鄰的次載波。如圖
2.4
所示,
我們將
2048
個次載波分成
N
G個群
(group)
,領航載波
(Pilot carrier)
集
合 與 各 用 戶 分 別 所 使 用 的 次 載 波 集 合 可 視 為 不 同 的 次 通 道
(subchannel)
。在各次載波群中,根據隨機分配的原則,將一個次載
波分配給一個次通道使用。各次通道所有次載波的分佈等效於跳頻展
頻
(Frequency Hopping Spread Spectrum
,
FHSS)
。
OFDMA
系統在頻譜資源的分配上有極佳的彈性
(flexibility)
,每
位用戶所使用的次載波個數可隨個別之傳輸速率而改變,而對於較
〝差〞的次載波,如低訊號雜訊比
(Signal to Noise Ratio, SNR)
,可選
擇捨棄不用,因此,配合適當的次載波分配
(Subcarrier allocation)
演算
法,將能有效地提升系統效能
(performance)
。
2.3 正交分頻多工/分時多重進接
Time Frequency 用戶一 用戶二 用戶三
在正交分頻多工
/
分時多重進接
(OFDM/TDMA)
系統
[4]
中,所有
的頻寬
(
次載波
)
一次只分配給一個用戶使用,不同的用戶在不同的時
槽
(Time slot)
內傳送資料。相較於
OFDM/FDMA
,
OFDM/TDMA
方式
有較大的頻率分集
(Frequency diversity)
。上圖
2.5
為其時間
-
頻寬資源
分配的示意圖,各用戶使用的時槽長短可依實際需要做調整。無線區
域網路
(Wireless Local Area Network, WLAN )
之
IEEE 802.11
即為採用
OFDM/TDMA
技術的現行系統之一。
2.4 正交分頻多工/分碼多重進接
本小節將介紹正交分頻多工與分碼多重進接
(OFDM/CDMA)
結
合的兩種方式
[5][6]
:多載波分碼多重進接
(Multicarrier Code Division
Multiple Access
,
MC-CDMA)
與 多 載 波 直 接 序 列 分 碼 多 重 進 接
(Multicarrier Direct Sequence Code Division Multiple Access
,
MC-DS-CDMA )
。它們使用不同的展頻碼區分用戶,但由於多路徑通
道會破壞展頻碼間彼此正交的特性,且展頻碼本身特性可能不盡完
美,用戶間彼此訊號會互相干擾,此多重進接干擾
(Multiple Access
Interference
,
MAI)
的存在將會嚴重降低系統的效能。
copier IFFT P/S . . . . . . 1 k c 2 k c k L c time 0 TS S/P . . . FFT ∑ . . . 1 k c 2 k c k L c Transmitter Receiver 圖2.6 MC-CDMA 系統傳送機與接收機架構圖
上圖
2.6
是
MC-CDMA
系統的傳送機與接收機架構。資料符元先
複製成
L筆資料,接著在頻域
(Frequency domain)
執行展頻
(spreading)
的動作,再經由
OFDM
調變後將訊號送出,其中
k是用戶的索引符
號。接收端針對接收之訊號的處理步驟依序為:
OFDM
解調、解展頻
(despreading)
,最後是資料偵測
(Data detection)
。
S/P IFFT P/S . . . . . . S/P . . . FFT P/S ( ) k c t ( ) k c t ( ) k c t . . . ( ) k c t ( ) k c t ( ) k c t ∑ ∑ ∑ . . . Transmitter Receiver time 0 TS 圖2.7 MC-DS-CDMA 系統傳送機與接收機架構圖
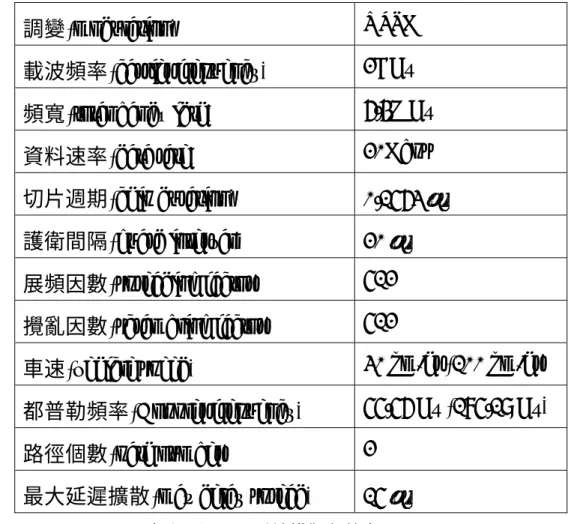
MC-DS-CDMA
系統傳送機與接收機架構圖如上圖
2.7
所示。與
上述
MC-CDMA
系統唯一的相異之處在於它是將訊號展頻後放在不
同的次載波傳送,因此是在時域
(Time domain)
上完成展頻的動作。
第三章
多用戶偵測 (Multiuser Detection)
CDMA
系統的容量
(capacity)
與效能主要受到
MAI
與遠近效應
(Near/far effect)
的限制。本論文
MC-CDMA
系統的傳輸品質亦受限於
MAI
,有鑑於此,我們在每個次載波上採用多用戶偵測技術,以降低
MAI
對
MC-CDMA
系統上鏈傳輸的影響。本章將針對多用戶偵測技
術的發展與分類做一介紹
[7][8]
。
3.1 單一用戶偵測
b T∫
1( ) g t b T∫
2( ) g t b T∫
( ) U g t . . . Decision b t iT= 1 y dˆ1 Decision b t iT= 2 y dˆ2 Decision b t iT= U y ˆ U d . . . . ( ) r t 圖3.1 傳統 DS-CDMA 接收機
傳統之直接序列分碼多重進接
(Direct sequence code division
multiple access, DS-CDMA)
接收機
(
圖
3.1)
採用單一用戶偵測
(Single
user detection)
,可視為多個相關器
(correlator)
或匹配濾波器
(Matched
filter)
的組合。接收機只針對單一用戶資料偵測,其他用戶的訊號一
律視為干擾
(interference)
來源,因此在資料偵測的過程中不需知道其
他用戶的資訊。
此接收機效能的好壞決定於用戶展頻碼的特性,也就是展頻碼的
自 相 關 值
(Auto-correlation)
應 遠 大 於 展 頻 碼 間 的 互 相 關 值
(Cross-correlation)
。定義
ρ
i k,為展頻碼間的相關係數:
, 01
( ), ( )
Tb( ) ( )
i j i j i j bg t g t
g t g t dt
T
ρ
=
=
∫
(3-1)
當
i
=
j
,自相關值
ρ
i i,等於
1
,當
i
≠
j
,互相關值
ρ
i j,:
0
<
ρ
i j,<
1
。因
為相異展頻碼的互相關值不等於零,用戶間的資料訊號會彼此干擾,
此即
MAI
。此外,展頻碼通過通道後由於隨機時間的位移不再保持
原有的正交特性,因此當用戶人數增加或其訊號功率變大,
MAI
將
更加嚴重,系統效能將呈現干擾限制
(Interference-limited)
的特性。
一 般 對 抗
MAI
的 方 法 有 展 頻 碼 的 設 計 、 功 率 控 制
(Power
control)
、通道編碼
(Channel coding)
、智慧型天線
(Smart antenna)
與多
用戶偵測技術等。以下我們將針對多用戶偵測技術做進一步的探討。
3.2 多用戶偵測
性。多用戶偵測技術可分類為聯合偵測
(Joint detection)
與干擾消除
(Interference cancellation)
。
在蜂巢式系統中,基地台
(Base station)
同時與多個行動台
(Mobile
station)
通訊,相較於下鏈
(downlink)
傳輸
(
基地台
→
行動台
)
的行動台
接收機只需對自己的訊號進行偵測,上鏈
(uplink)
傳輸
(
行動台
→
基地
台
)
的基地台接收機則必須同時偵測所有行動台的訊號。由於基地台
擁有所有行動台的資訊,其次再考量行動台需符合低複雜度的要求,
因此,多用戶偵測技術較適合應用於上鏈傳輸中。
3.2.1 聯合偵測
本小節將詳細介紹採用聯合偵測技術的三種多用戶偵測器,依序
是 最 大 可 能 序 列 估 計
(Maximum Likelihood Sequence Estimator,
MLSE)
、解相關偵測器
(Decorrelator Detector)
和最小均方差偵測器
(Minimum Mean Square Error Detector)
。
3.2.1.1
最大可能序列估計
Verdú[9]
於
1986
年提出最大可能序列估計:在傳統的多組相關器
後接上一
Viterbi
解碼器
(decoder)
,此為多用戶偵測技術的最佳化
(optimum)
作法,然而其複雜度隨用戶個數的成長以指數方式上升,
需要大量的運算,考量實作上的需要,最佳化作法並沒有被廣泛地運
用。
3.2.1.2
解相關偵測器
解相關偵測器的基本原則是針對傳統多組相關器的輸出結果,透
過線性轉換,以降低用戶訊號間的相互干擾,其系統複雜度和用戶個
數呈線性關係。以下介紹兩種主要的解相關偵測器:多路徑解相關偵
測器
(Multipath Decorrelator Detector, MD)
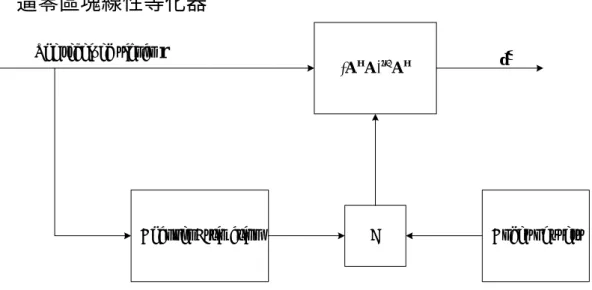
和逼零區塊線性等化器
(Zero-Forcing Block Linear Equalizer, ZF-BLE)
。
多路徑解相關偵測器
我們以三位用戶,假設通道只有一根路徑的傳輸為例,多組相關
器的輸出可表示成向量
(Vector)
形式:
1 2,1 3,1 1 1 1 2 1,2 3,2 2 2 2 3 1,3 2,3 3 3 31
0
0
1
0
0
1
0
0
y
A
D
n
y
A
D
n
y
A
D
n
ρ
ρ
ρ
ρ
ρ
ρ
=
+
=
+
y
RAD n
(3-2)
其中
R
,
A
,
D
和n 分別是用戶展頻碼間的相關係數矩陣、接收訊號
振幅矩陣、傳送資料訊號向量與雜訊向量。接著,將每個相關器的輸
出結果乘上相關係數矩陣的反矩陣
−1R ,
$
=
−1=
+
−1d
R y
AD
R n
(3-3)
經由反矩陣
−1R 的線性轉換可完全消除用戶間的相互干擾,還原用戶
的資料,但卻放大了雜訊部分
(
−1)
R n
。此外,展頻碼也必須謹慎地選
擇以確保反矩陣
−1R
存在。
逼零區塊線性等化器
Channel Estimation A Codes of users The received signal
1
(A AH )−AH d$
r
上圖
3.2
為逼零區塊線性等化器的架構圖。假設接收訊號為:
=
+
r
Ad
n (3-4)
其中
A
是展頻碼與通道脈衝響應做迴旋
(convolution)
後的矩陣。它的
基本作法類似多路徑解相關偵測器,也需計算反矩陣
A
−1,然後再對
接收訊號做一線性的轉換:
$
=
(
H)
−1 Hd
A A
A r
(3-5)
逼零區塊線性等化器的複雜度較多路徑解相關偵測器高,但雜訊加強
(Noise enhancement)情形較為輕微,它的性能與通道估計的準確與否
密切相關,當通道估計不夠準確時,其效能將會大幅地下降。
3.2.1.3 最小均方差偵測器
最小均方差偵測器根據最小化誤差的均方差之準則,在干擾消除
與雜訊放大間做一最佳的權衡(tradeoff)。接收訊號經由以下的線性轉
換可得最後的資料偵測結果。
$
1 2,1 3,1 1,2 3,2 1,3 2,3(
/ 2 )
1
1
1
ρ
ρ
ρ
ρ
ρ
ρ
−=
+
0d
R
N
I
r
R @
(3-6)
R
定義成用戶展頻碼間的相關係數矩陣。它的性能在
SNR
高時和多
路徑解相關偵測器相近,當
SNR
降低時,性能則接近於傳統的匹配
濾波器。在複雜度的考量下,因為反矩陣運算帶來了龐大的運算量,
最小均方差偵測器與上述兩個解相關偵測器皆面臨複雜度太高的問
題。此外,最小均方差偵測器還需計算全部用戶接收訊號的功率大小。
3.2.2 干擾消除
所謂干擾消除,簡而言之,就是干擾訊號的估計
(estimation)
、重
(reconstruction)
(cancellation)
干擾消除屬於次佳化的作法,但精確的通道估計能改善其效能。如果
根據有誤的估計結果去重建干擾訊號再消除之,如此反而會加倍干擾
的影響性,此為錯誤之行進
(error propagation)
。一般干擾消除的作法
主要有連續干擾消除
(Successive interference cancellation, SIC)
、平行
干擾消除
(Parallel interference cancellation, PIC)
兩類
[10]
,以下將討論
其個別的作法與優缺點。
3.2.2.1
連續干擾消除
連續干擾消除的基本原則為每一層級偵測器首先將所有用戶的
接收訊號依其能量大小排序,接著只針對最大能量的用戶訊號進行估
計與消除,此舉的原因為能量大的用戶能獲得較精確的資料決策結
果。上述動作將一直被重複直到所有用戶的訊號都被偵測出來為止。
Desision 0 T∫
Desision 0 T∫
( ) y t 2 y 2 A 2( ) s t 1( ) s t ' 1 y b$1 2 b$ 圖3.3 連續干擾消除架構一(用戶個數為二)以下我們舉用戶個數為二的例子
(
上圖
3.3)
說明連續干擾消除的
詳細過程。假設第二個用戶的訊號能量大於第一個用戶的訊號能量,
根據上述的原則,先對第二個用戶匹配濾波器的輸出
y
2做決策:
( ,
)
T( )
( )
y
=
y s
=
∫
y t s t dt
×
再於接收訊號
y t
( )
中扣除第二個用戶重建後的訊號
A b s t
2$
2 2( )
:
$
(
)
2 2 2 1 1 1 2 2 2( )
( )
( )
( )
( )
( )
( )
y t
y t
A b s t
y t
Ab s t
A b s t
n t
=
−
=
+
+
$
(3-8)
接下來將 $
y t 通過第一個用戶的匹配濾波器,最後進行資料決策可偵
( )
測出第一個用戶的資料訊號
b$ ,
1$
1 1 2 1 2 1 2 2 2 1 1 2 2 1sgn( ,
)
sgn(
)
sgn(
sgn( ))
sgn(
(
)
,
)
b
y s
y
A b
y
A
y
Ab
A b
b
n s
ρ
ρ
ρ σ
=
=
−
=
−
=
+
−
+
$
$
$
(3-9)
其中
2 1 0( ) ( )
Ts t s t dt
ρ
@
∫
。由以上的式子推導,可得等效於圖
3.3 的另一
種連續干擾消除架構(圖 3.4)。
Decision 0 T∫
0 T∫
0 T∫
Decision 2 A 2 y ρ 1 y 2 b 1 b ( ) y t 2( ) s t 1( ) s t 圖3.4 連續干擾消除架構二(用戶個數為二)藉由連續干擾消除法,能較可靠地偵測出訊號強度較弱的用戶資
料。然而當用戶總數增加時,對於高速的資料傳輸系統而言,其在資
料重建與干擾消除過程中所導致的延遲現象將不容被忽略。
3.2.2.2 平行干擾消除
Varanasi 和 Aazhang[11]首先提出多層級(multi-stage)平行干擾消
除。 不同於連續干擾消除每一層級中只消除能量最大的用戶資料干
擾,多層級平行干擾消除除了第一層級之外,其他層級將同時消除其
他所有用戶的干擾訊號,平行干擾消除適用於良好功率控制的系統。
平行干擾消除第一層級直接對所有用戶匹配濾波器的輸出結果
進行決策並重建此訊號,重建訊號的目的在於模擬該用戶對其他用戶
造成的
MAI。第二層級之後,先消除上一層級各用戶重建的干擾訊
號,接著進行資料決策,最後再重建資料訊號以提供下一層級干擾消
除使用。
0 T∫
0 T∫
0 T∫
2 y ρ 1 y ( ) y t 2( ) s t 1( ) s t Decision b$1 Decision b$2 Decision Decision 2 A 1 A 圖3.5 二層級的平行干擾消除架構圖(用戶個數為二)上圖
3.5 是總層級數為二的平行干擾消除架構圖。最後一層級得
到的偵測結果如下所示:
$
ksgn(
$
j)
k j jk j kd
y
A
ρ
d
≠=
−
∑
(3-10)
平行干擾消除的優點在於其平行化的處理方式能確保資料偵測延遲
考量多層級平行干擾消除在前幾個層級資料偵測的準確度不
高,Divsalar[12]提出了部分平行干擾消除(Partial parallel interference
cancellation, PPIC),亦可稱為加權平行干擾消除(Weighted parallel
interference cancellation)。其作法為在干擾消除的過程中只消除部分
的
MAI,但隨著層級數的增加,干擾訊號的估計也愈可靠,因此將
逐步地提高干擾消除的加權(weighting)大小。此架構的第 m 個層級資
料偵測結果可表示如下:
$
k[ ]
[ ]
$
j[ ]
(
1
[ ]
)
$
k[
1]
k j jk j kd m
w m
y
A
ρ
d m
w m
d m
≠
=
×
−
+ −
×
−
∑
(3-11)
其中
w m 是第 m 個層級干擾消除的加權係數
[ ]
(weighting coefficient)。
3.3 混合式多用戶偵測
合併使用以上各小節所敘述的演算法即所謂的混合式多用戶偵
測。例如線性演算法與干擾消除的組合。除了採用的方法不同外,其
架構也不盡相同。以下列出三種混合式多用戶偵測技術:
最小均方差偵測器結合平行干擾消除(MMSE with PIC)
解相關偵測器結合連續干擾消除(Decorrelator with SIC)
解相關偵測器結合平行干擾消除(Decorrelator with PIC)
以最小均方差偵測器結合平行干擾消除為例,最小均方差偵測器
提供了較精確的初始資料估計,如此能提升後續平行干擾消除的效
能。
第四章
多載波分碼多重進接
(MC-CDMA)系統
傳送機架構和通道模型
在
MC-DS-CDMA 系統下,資料符元是展頻在相同的頻帶上,通
道衰減嚴重時,各切片訊號將同時受到通道衰減的影響,以致於無法
正確偵測訊號,因此,我們採用
MC-CDMA 的系統架構。在本章中,
我們將建構一
MC-CDMA 系統上鏈傳送機架構,並對系統所使用之
展頻碼、通道模型和上鏈多用戶環境做詳細的介紹。
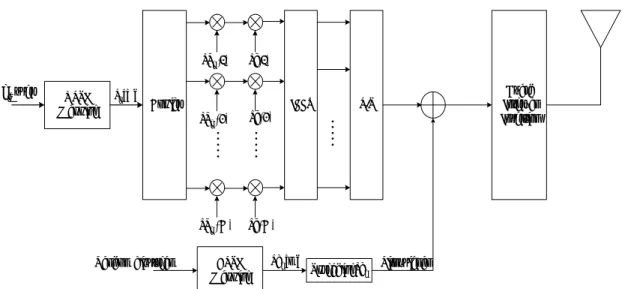
4.1 傳送機架構
QPSKMapping Copier IFFT . P/S
. . . . . . . . .
Spreading Pilot signal
Guard Interval Insertion (1) u cd (2) u cd ( ) u cd N u cp th u user [ ] u b m . . . . . (1) cs (2) cs ( ) cs N BPSK Mapping [m] u bp Random bit stream
上圖
4.1 為 MC-CDMA 系統的傳送機架構圖。每個用戶要傳送的
訊號分為資料訊號(Data signal)與領航訊號(Pilot signal)。頻域的資料
訊號依序經過
QPSK 對映(mapping)、展頻、攪亂,也就是說 QPSK
對映後的資料先複製成
N 組資料
( N 為 FFT 或展頻碼的長度),每一組
資 料 再 分 別 乘 上 展 頻 碼 與 攪 亂 碼
(Scrambling code) 的 各 個 切 片
(chip),可視為將
N組資料放在不同的次載波上傳送。接著做
IFFT 運
算轉換成時域訊號,再加入時域上的領航訊號。領航訊號是
BPSK 對
映後再做展頻的訊號,在接收端作為估計每個用戶的通道之用。在傳
送訊號前,每個資料框要加上一段護衛間隔。
我們使用
m-序列(m-sequence)為攪亂碼以區分蜂巢式行動通訊
系統中不同的蜂巢(cell)。為了降低 MAI 的影響,採用彼此正交的華
氏碼(Walsh code)區分每個用戶的資料訊號,而有良好相關性的金氏
碼(Gold code)則用來區分不同用戶的領航訊號。
依照上 述的傳送機架構 ,假設完美的耐 奎斯取樣法
(Nyquist
sampling),第 u 個用戶欲傳給基地台的基頻資料訊號可表示如下:
□
□
-1 0( )
[ ]
cd ( )exp( 2
/ )
(
(
1) )
( )
( )
( )
c N u u u T c s k IFFT u uD n
b m
k
j
kn N
P t nT
m
T
cd k
cd k
cs k
π
= ×
=
×
−
−
−
×
∑
1 4 4 4 44 2 4 4 4 4 43
@
(4-1)
其中
[ ]
ub m
:第
u 個用戶的第 m 個傳送資料符元
(Data symbol)
。
( )
ucd k
:第
u 個用戶資料訊號展頻碼的第
k
個切片。
( )
cs k
:攪亂碼的第
k
個切片。
N
:
IFFT
的長度。
cT
:展頻碼的切片時間
(chip time)
。
( )
c TP t
:
( )
1 ,
0
,
0
0 ,
c T ct
P t
t nT n
=
=
=
≠
假設第
u 個用戶領航訊號其展頻碼為
cp
u,則第
u 個用戶的領航訊號
( )
uP n
為:
( )
[ ]
( )
(
(
1) )
c u u u T c sP n
=
bp m cp n
× ×P t nT
−
−
m
−
T
(4-2)
其中
[ ]
ubp m
:第
u 個用戶的第 m 個傳送領航符元
( Pilot symbol)
。
( )
ucp n
:第
u 個用戶領航訊號展頻碼的第 n 個切片。
cT
:展頻碼的切片時間
(chip time)
。
( )
c TP t
:
( )
1 ,
0
,
0
0 ,
c T ct
P t
t nT n
=
=
=
≠
每個用戶欲傳給基地台的訊號
s n
u( )
即為其資料訊號與領航訊號相
加:
( )
( )
( )
u u us n
=
D n
+
P n
(4-3)
4.2 展頻碼
展頻碼特性對於系統效能有顯著的影響。選用展頻碼的原則
是:找到一組支援多個用戶並且彼此互相關值小的展頻碼。以下將分
別探討本系統所使用的三種展頻碼:
m-
序列、華氏碼與金氏碼。
4.2.1 m-序列
當一個序列其二元符號
0
和
1
出現的機率相同時,稱之為隨機二
元序列
(Random binary sequence)
。
m-
序列由線性回饋平移暫存器
平衡性
(Balance property)
:在每一週期的
m-
序列中,
1
的總數比
0
的總數多一個。
活動性
(Run property)
:〝
run
〞的意義為
0
或
1
在週期序列中連續
出現的長度。例如〝
run
〞長度為
1
的機率等於
1
2
,
〝
run
〞長度為
2
的機率等於
1
4
,
〝
run
〞長度為
3
的機率等於
1
8
。對於長度為
m
的
線性回饋平移暫存器產生的
m-
序列,其〝
run
〞的總數為
(
1)
2
N
+
,
2
m1
N
@
−
。
相關性
(Correlation property)
:
m-
序列的自相關函數為週期性。
m-
序列的週期為
2
m−
1
,
m
是平移暫存器的長度。定義一週期
為
T
b之週期訊號
p t
( )
的自相關函數為
2 21
( )
b( ) (
)
b T c T b b cR
p t p t
dt
T
T
NT
τ
=
−−
τ
=
∫
(4-4)
其中
T
c為切片時間。根據上式的定義,
m-
序列的自相關函數可表
示如下:
( 1) 1 ( )for the remainder of the pefiod 1 c c c N t t T NT R N
τ
+ − ≤ = − , ,(4-5)
4.2.2 華氏碼
在一傳送機和接收機同步的系統中,華氏碼提供完美的正交性,
任兩個不同華氏碼的互相關值為零。但在不同步的系統中,相異華氏
碼之間的互相關值無法預測其大小,此外,華氏碼的自相關值亦無法
華氏碼是由一組稱為哈得馬矩陣
(Hadamard matrices)
的特殊方陣
群所 產生。欲 得到
N N
×
的 哈得馬矩 陣
H
N以產 生所需要 長度 為
2
nN
=
的華氏碼可依照如下的遞迴步驟:
[ ]
1
1 1
1
1
1 1
1
1
1
1 1
1
1 1
1
1
1
1
1 1
=
=
−
−
−
=
=
−
−
−
−
=
1 2 2 2 4 2 2 N/2 N/2 N N/2 N/2H
H
H
H
H
H
H
H
H
H
H
H
g
g
g
1
2 Nh
h
h
@
M
(4-6)
其中
h
i為
H
N矩陣中第
i列的列向量,即一個長度為
N
的華氏碼。任意
兩個不同華氏碼間滿足下列特性:
10
N T ik jk kN i
j
h h
i
j
==
=
=
≠
∑
i jh h
(4-7)
即兩相異華氏碼滿足正交的特性。
4.2.3 金氏碼
金氏碼是一符合低互相關值同時碼的個數也夠多的特殊序列。其
優點為互相關值大小是可預測且平均分佈的。在本節中將介紹金氏碼
產生的方法和其相關值的特性。
金氏碼是由兩個為偏好碼對
(preferred pair)
的
m-
序列所組成。選
定一組偏好碼對序列
a
、
b
,序列
a
、
b
皆是長度為
N
=
2
m−
1
的
m-
序
列:
0 1 1 0 1 1{ } (
....
)
{ } (
....
)
n N n Na
a a
a
b
b b
b
− −=
=
=
=
a
b
(4-8)
由 a 、 b 產生的金氏碼為:
2 1( , ) { , ,
,
,
, ,
N}
G
a b
=
a b a
⊕
b a
⊕
T
b a
⊕
T
b
L
a
⊕
T
−b
(4-9)
其中
T 為移位運算(shift operation),共有 2
i m+
1
個金氏碼。
一組偏好碼對的互相關值已證明必定為下列三個值:
−
t m
( )
、
−
1
和
( ) 2
t m
−
,其中
t m 的定義如下:
( )
1 2 2 21 2
( )
1 2
m mm
t m
m
+ +
+
=
+
若 為奇數
若 為偶數
(4-10)
在所產生的碼集合
G a b
( )
,
中,任兩對碼的互相關值皆符合上述偏好
碼對的特性。
為了與
FFT 的長度相對應,我們在金氏碼的最後加上一個額外的
切片,並令其大小等於原金氏碼第一個切片的值,以補齊碼的長度。
4.3 通道模型
通道模型可分類為靜態通道(Static channel)與動態無線電通道
(Mobile radio channel)。
加成性白色高斯雜訊(AWGN, Additive White Gaussian Noise)通
道和固定雙路徑通道(Fixed two-path channel)屬於靜態通道。固定雙路
徑通道的基頻脈衝響應可表示如下:
( )
( )
(
)
h t
=
δ
t
+
δ
t
−
τ
(4-11)
其中
τ
為第二條路徑相對於第一條路徑的延遲。
雙路徑衰減通道(Two-path fading channel)為一動態無線電通道,
它的通道基頻脈衝響應為:
1 2
( )
( ) ( )
( ) (
)
h t
=
a t
δ
t
+
a t
δ
t
−
τ
(4-12)
其中
a t 、
1( )
a t 為兩條路徑的複數增益,可表示成 N 個弦波相加,
2( )
分別由兩獨立(independent)之傑克衰變通道模型(Jake’s fading channel
model)所產生:
, 11
( )
Nexp( 2
)
1,2
k n k n n fa t
j
f t
k
N
=π
φ
=
∑
+
=
(4-13)
其中
n dcos(
2
)
fn
f
f
N
π
=
,
f 為最大都普勒頻率(Doppler frequency),
dφ
k n,是第
k 條路徑第 n 個弦波的初始相位。
4.4 上鏈多用戶環境
Tx 1 Tx u. .
.
1( ) s n ( ) u s n. . .
( ) W n ( ) r n 1( ) h n ( ) u h n圖4.2 上鏈多用戶傳輸模型
如上圖
4.2 所示,對上鏈傳輸的基地台接收機而言,所接
收到的訊號是來自不同用戶的訊號經過獨立通道的總和:
1( )
U u( )
u( )
( )
ur n
s n
h n
W n
==
∑
∗
+
(4-14)
其中
( )
us n :第 u 個用戶的傳送訊號。
( )
uh n :第 u 個用戶傳送訊號所經過的通道。
( )
W n :加成性白色高斯雜訊(AWGN)。
第五章
多載波分碼多重進接
(MC-CDMA)系統
接收機與多用戶偵測技術之結合
在本章中,我們提出一 MC-CDMA 系統的上鏈接收機架構,利用領
航訊號估計個別用戶的通道,並結合多用戶偵測技術以降低 MAI 的影
響[17],進而提升系統的用戶容量與效能。
5.1 接收機架構
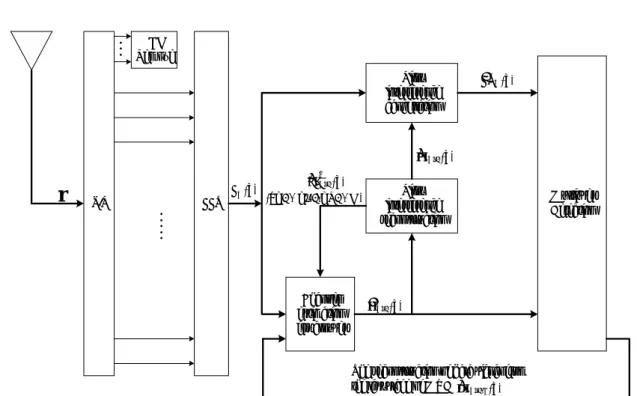
Channel estimation for all userMultiuser Detection Pilot interference reconstruction Pilot interference cancellation S/P FFT GI Remove . . . . .
r
R km( ) m−1( )k H ( )m Rd k . . . m−1,S( )k DI i 1( ) m PI − k (i=1u−1,u+1U)The reconstruction of data signal from the last stage of MUD
m−1( )k PI
本論文提出之
MC-CDMA 系統上鏈接收機架構如上圖 5.1 所示。
首先假設系統已達到理想的同步。無線電頻率(Radio frequency, RF)
訊號經由射頻頭端(RF front end)轉換成基頻訊號r 後,接著移除訊號
中護衛間隔的部分,再經過
FFT 轉換,可得到第 k 個次載波上的訊號
( )
mR k ,提供給基頻接收機進行後續的處理,其中 m 是接收資料符元
的時間索引符號。
頻域訊號
R k 的訊號處理主要包含兩部分。一部份利用接收訊
m( )
號中每個用戶領航訊號的成分,分別對每個用戶進行通道估計,假設
通道估計的結果為 □
H
m( ) {
k
=
H k H k
□
1m( ),
□
2m( ),...,
H k
□
Um( )}
,其中 □
( )
u mH k 代
表第
u 個用戶在第 m 個符元第 k 個次載波上所估出之通道頻率響應。
另一部份我們利用前一個符元通道估計的結果去重建每個用戶的領
航訊號 □
PI
m−1( )
k
,接著再扣除
R k 中所有用戶領航訊號的部份,最
m( )
後將剩餘的資料訊號
Rd k
□ ( )
m進行多層級的平行干擾消除多用戶資料
偵測。
5.2 通道估計
上鏈傳輸中,每個用戶的訊號經過不同的通道到達基地台,接
收機需要估出所有用戶的通道以提供多層級的平行干擾消除多用戶
偵測進行干擾訊號重建與消除的動作。為了估計每位用戶的通道,所
有用戶必須在傳送端傳送一已知的領航訊號。因為接收訊號中領航訊
號部分解展頻的結果即為粗估之通道頻率響應乘上展頻碼的長度
N
,所以接收機收到訊號之後,先針對不同用戶的領航訊號解展頻,
之後再進行更精確的通道估計。本節將詳細描述此一通道估計的方
法。
5.2.1 解展頻
我們採用
FFT
匹配濾波器
(FFT matched filter)
的觀念完成解展頻
的動作。以下將對如何以
FFT
匹配濾波器實現解展頻做詳細的解釋。
假設
x n
1( )
、
x n
2( )
是兩個長度為
N
之序列,
X k
1( )
、
X k
2( )
則為
x n
1( )
與
2( )
x n
的
FFT
轉換,
x n
1( )
和
x n
2( )
的互相關函數
1 2( )
x xτ
Γ
可表示如下:
{
}
1 2 1 * 1 2 0 * 1 2( )
( ) [(
) ]
IFFT X ( )X ( )
N x x N mx m x
m
k
k
τ
−τ
=Γ
=
−
=
∑
(5-1)
其中
( )
g
N為
( )mod N
g
。由上式可知,兩訊號之互相關函數可由其頻域
訊號相乘之後,再做一
IFFT
的轉換獲得。
若
x n
1( )
與
x n
2( )
為相同之
m-
序列
c n
( )
,則
c n
( )
的自相關係數為:
{
}
1 * 0 *( )
( ) [(
) ]
IFFT
( ) ( )
1 ,
0
,
0
N c N m
c m c m
C k C k
N
τ
τ
τ
τ
− =Γ
=
−
=
−
≠
=
=
∑
(5-2)
FFT IFFT ( ) c n C k( ) *( ) C k * ( ) ( ) C k C k Γc( )τ 圖5.2 以 FFT 匹配濾波器實現解展頻展頻碼
c n
( )
的自相關函數亦可由頻域上之展頻碼
C k
( )
先相乘後
再做
IFFT
轉換得之。自相關函數相當於展頻碼解展頻的結果,在系
統完美同步的假設下
(
τ
=
0
)
,可得到一高峰
(peak)
值。上圖
5.2
即為
如何以
FFT
匹配濾波器實現解展頻的示意圖。
5.2.2 通道估計架構
Path selection IIR filter FFT ( ) m R k IFFT * ( ) u CP k N u1( ) m H − k u1( ) m H − k u 1( ) m h − k 1( ) u m h− k FFT matched filter u1,IIR1( ) m h− k Interference cancellation Delay 1, 1 ( ) ( 1 ) ( ) ( 1 1, 1 ) i m S i m DI k i U PI k i u u U − − = = − + Inter-path Decorrelating u1'( ) m h− k [ 1] u bp m− 圖5.3 通道估計架構圖(第u個用戶)應用於本系統的通道估計架構如上圖
5.3
所示。首先,頻域訊號
( )
mR k
經過一個符元的延遲使訊號與多用戶偵測接收機最後一級回授
的訊號同步,然後消除全部用戶的資料訊號干擾和其他用戶的領航訊
號干擾可得到粗略僅包含有第
u
位用戶領航訊號成分的訊號。其中全
部用戶的資料訊號干擾與為來自多用戶偵測器最後一級回授的資料
重建訊號。
接著把訊號通過
FFT
匹配濾波器做領航訊號的解展頻,可得到
第
u
位用戶粗略估計的通道脈衝響應
%
1( )
u mh
−k
,其中
CP k
u( )
代表第
u
個
用戶領航訊號的頻域展頻碼,除上
N
是正為了正規化
(normalize)
自相
關係數。我們必須估出全部用戶的通道資訊以提供多用戶偵測接收機
做後續的處理。
Delay α 1−α %( )u m h k %,IIR( ) u m h k 圖5.4 一階無限脈衝響應濾波器 Path selection IIR filter | . | u 1,IIR1( ) m h − k 1( ) u m h − k u 1,abs( ) m h − k 1,IIR2( ) u m h − k 圖5.5 通道路徑選擇架構圖
由於通道估計的準確度會受到雜訊與通道衰減等因素的影響,我
們將粗估之通道脈衝響應
%
1( )
u mh
−k
經過一個一階無限脈衝響應濾波器
(First order IIR filter)
與路徑選擇
(Path selection)
方塊,以得到更精確的
通道估計。
圖
5.4
是一階
IIR
濾波器的架構圖,它是一個低通的濾波器,可
降低每個符元中雜訊的強度。
α
是它的衰減因子,其大小的選擇和訊
號雜訊比
(SNR)
、通道變化快慢有關。
α
愈大,濾波器頻寬愈小,因
此當雜訊大時,選用較大的
α
值平均效果較好。然而平均太長,通道
響應便無法及時更新,當通道變化快
(
車速快
)
時,則選用較小的
α
值。
一階
IIR
濾波器的數學式子可表示如下:
%
u,IIR( )
%
u 1,IIR( ) (1
)
%
u( )
m m mh
k
= ×
α
h
−k
+ −
α
×
h k
(5-3)
我們藉由第一個
IIR
濾波器平均的動作降低雜訊對通道估計的干
擾。而路徑選擇機制中,取絕對值後的第二個
IIR
濾波器目的在於平
均通道衰減對路徑振幅大小的影響,因此需要較長的平均長度,最後
經由一次的路徑選擇找出通道脈衝響應的位置。
通道估計進行至此,確認了通道脈衝響應中路徑位置的部分。然
而,我們在傳送端以金氏碼作為領航訊號的展頻碼,由於金氏碼的自
相關特性並不完美,也就是其自相關值不全為零,相異路徑間會交互
影響,因此,上述估計的通道脈衝響應 $
h k
um( )
大小並不準確。我們採
用一個路徑解相關
(Inter-path Decorrelating)
機制,透過路徑相關矩陣
(Path correlation matrix)
的反矩陣運算,消除路徑間的交互關係,修正
粗估的路徑值大小。最後估計出之通道脈衝響應
$
'( )
u mh k
再經由
FFT
轉
換得到通道頻率響應 □
H k
um( )
,提供給後續的多用戶偵測器利用。
5.2.2.1
路徑選擇
本小節將介紹兩種選擇路徑位置的作法。第一個方法為先找出平
均 結 果
%
,IIR 2{
%
,IIR2(1),
%
,IIR2(2),...,
%
,IIR2( )}
u u u u m
=
h
mh
mh
mN
h
中 能 量 最 強 的 路 徑
%
,IIR2 max( )
u mh
k
,並決定一臨界值
E
th,
E
th為與最大能量路徑
%
,IIR2( )
max u mh
k
的
能量差,又定義
Th
等於
(
%
,IIR2( )
max)
u m thh
k
−
E
。路徑位置選擇的準則是僅
保留原估計通道脈衝響應
%
,IIR1( )
u mh
k
中能量強度大於
Th
的路徑,只留下
能量與最大能量路徑的能量差小於臨界值
E
th的路徑,其餘路徑位置
設為零,視為雜訊和通道衰減所造成的假象。上述之數學表示式如下
所示:
$
%
%
%
,IIR2 ,IIR1 ,IIR20
,
( )
( )
,
( )
( )
u u m m u u m mh
k
Th
h k
h
k
h
k
Th
<
=
≥
(5-4)
第二個作法是將平均的結果依照其能量排列,根據排列結果留下
出能量門檻
Th 的收斂速度較慢,需要很長的平均,本論文通道估計
採用第二個路徑選擇方法。
5.2.2.2 路徑解相關
不完美的展頻碼特性導致不同路徑的訊號會相互影響,所以,通
道估計效能受限於用戶本身領航訊號展頻碼不全為零的自相關值。假
設所有用戶的展頻碼在接收機為已知,以第
m 個符元、通道脈衝響應
路徑個數
P
為例,第
i
個路徑延遲為
τ
i與第
j 個路徑延遲為
τ
j的相關值
ijρ
為
(
)
(
)
1 * 01
( )
(
)
N ij u u j i N kcp k
cp
k
N
ρ
−τ τ
==
∑
×
−
−
(5-5)
則路徑相關矩陣可表示為
11 12 1 12 1 21 22 2 21 2 1 2 1 21
1
1
P P P P P P PP P Pρ
ρ
ρ
ρ
ρ
ρ
ρ
ρ
ρ
ρ
ρ
ρ
ρ
ρ
ρ
=
=
R
L
L
L
L
M
M O
M
M O
(5-6)
實際的通道脈衝響應向量
'h
與未經過路徑解相關的通道脈衝響應向
量
h
的關係式如下所示:
×
'h = R h
(5-7)
因此透過路徑相關矩陣的反矩陣運算,可消除路徑間的交互影響,得
到實際的通道脈衝響應:
×
' -1h = R
h
(5-8)
其中
$
( )
1$
( )
T u u m m Ph
τ
h
τ
h @
L
、
$
$
' ' 1( )
( )
T u u m m Ph
τ
h
τ
'h @
L
。此外,
當所需路徑解相關的路徑數目增加,反矩陣龐大的運算量在實作上並
5.3 領航訊號干擾消除
( ) m R k Sum 1 1( ) m H − k 2m1( ) H − k U1( ) m H − k 1( ) CP k ( ) U CP k. . .
. .
( )m Rd k 1 1( ) m PI − k 2m1( ) PI − k U1( ) m PI − k. .
. .
.
Pilot interference reconstruction
Pilot interference cancellation
2( ) CP k 1[ 1] bp m− 2[ 1] bp m− [ 1] U bp m− 圖5.6 領航訊號干擾重建與消除架構圖
為配合上鏈接收機多用戶偵測技術的使用,每位用戶必須傳送一
已知的領航訊號供接收機通道估計之用。令領航訊號的能量等於資料
訊號的能量。為了不使領航訊號干擾資料的決策,進行資料偵測之
前,先消除所有用戶的領航訊號干擾
(
上圖
5.6)
。
根據前一符元的通道估計結果與領航訊號的頻域展頻碼重建領
航訊號干擾,第
u
位用戶在第
k
個次載波上重建之領航訊號 □
PI k
um( )
可
表示為:
□
um 1( )
□
um 1( )
[
1]
( )
u uPI
−k
=
H
−k
×
bp m
− ×
CP k
(5-9)
其中
m
是符元的時間索引符號。然後扣除
R k
m( )
中所有重建領航訊號
的部分,即
□
□
1 1( )
( )
U um( )
m m uRd k
R k
PI
−k
==
−
∑
(5-10)
所得為剩餘的資料訊號
Rd k
□ ( )
m。
5.4 應用於頻域之多用戶偵測技術
我們採用多層級的平行干擾消除多用戶偵測器。在每一級偵測器
中主要包含三個動作:消除其他用戶的資料訊號干擾、資料偵測與資
料重建。資料重建的目的在於模擬用戶本身資料對其他用戶造成的干
擾,下一層級再根據前一層級重建的資料訊號消除
MAI
。平行干擾
消除每增加一層級,對個別用戶的接收機而言,其訊號與雜訊比將獲
得改善,因此經過多層級的干擾消除後,能得到更精確的偵測結果。
但平行干擾消除隨著級數的增加,系統容量的改善漸趨飽和,一般使
用
2 ~ 3
級的處理即可。
5.4.1 第一級偵測器
Channel estimation Code matching Channel matching Data decision u 1( ) m H − kData signal reconstruction
u,1( ) m DI k um,1 d ( )m Rd k cd ( )u k