行政院國家科學委員會專題研究計畫 成果報告
海洋聲學整合計畫─海洋音響參數之量測、分析及應用
(Ⅲ)--總計畫及子計畫五
研究成果報告(完整版)
計 畫 類 別 : 整合型 計 畫 編 號 : NSC 96-2623-7-002-009-D 執 行 期 間 : 96 年 01 月 01 日至 96 年 12 月 31 日 執 行 單 位 : 國立臺灣大學工程科學及海洋工程學系暨研究所 計 畫 主 持 人 : 陳琪芳 共 同 主 持 人 : 黃維信、宋國士、劉家瑄、王崇武、康仕仲 計畫參與人員: 研究人員:劉家瑄、宋國士、黃維信、宋家驥、湛翔智、苑 梅俊、張元櫻、邱永盛、黃成鶊 共同主持人:王崇武 處 理 方 式 : 本計畫可公開查詢中 華 民 國 97 年 03 月 31 日
行政院國家科學委員會整合型研究計畫 結案報告
海洋聲學整合計畫-海洋音響參數之量測、分析及應用(Ⅲ)
計畫類別:整合型計畫
計畫編號: NSC96-2623-7-002-020
執行期間:96 年 1 月 01 日 至 96 年 12 月 31 日
執行單位:國立臺灣大學工程科學及海洋工程學系暨研究所
計畫主持人:陳琪芳
共同主持人:王崇武
計畫參與人員: 劉家瑄,宋國士,黃維信,宋家驥,
湛翔智,張元櫻,邱永盛,黃成鶊,苑梅俊
報告類型:簡要報告
報告編號:UAL-NTU TR
處理方式:除相關需求單位外,本計畫不可對外提供參考
中華民國九十七年三月三十一日
目錄
目錄 ... 2
圖目錄 ... 4
中文摘要 ... 6
Abstract... 6
壹、計畫目標 ... 8
貳、研究動機及現況 ... 8
2.1 動機... 9
2.2 研究現況... 10
參、研究內容 ... 12
3.1 西南海域驗證實驗... 12
3.1.1 西南海域環境簡介... 12
3.1.2 西南海域音傳實驗簡介... 13
3.1.3 實驗結果與訊號分析... 14
3.1.4 迴響... 17
3.1.5 聲源強度及指向性... 18
3.4 子計畫一:水文變化及海床沈積物之聲學特性研究 ... 18
3.4.1 研究目的... 18
3.4.2 研究要點... 18
3.4.3 岩心資料分析成果... 19
3.4.4 沉積環境探討... 19
3.4.5 水文資料調查... 21
3.5 子計畫二:海洋參數反算機制及到達時間之研究 ... 21
3.5.1 研究目的... 22
3.5.2 研究要點... 22
3.5.3 模擬成果分析... 23
3.5.4 結論... 24
3.6 子計畫三:水下噪音實驗與分析 ... 25
3.6.1 研究目的... 25
3.6.2 研究要點... 25
3.6.3 實驗位置... 25
3.6.4 實驗儀器... 26
3.6.5 噪音位準估算... 28
3.6.6 檢討與建議... 28
3.7 子計畫四:海洋環境參數與反潛作戰模式結合研究 ... 29
3.7.1 研究目的:整合基礎與戰術級模型以分析阻柵效能 ... 29
3.7.3 研究要點... 29
3.7.4 反潛搜索... 30
3.7.5 ASORPS 之應用... 30
3.7.6 分析與結論... 31
3.8 子計畫五:聲納偵測參數可靠度分析 ... 31
3.8.1 研究目的... 31
3.8.2 聲納偵測距離的不確定性分析... 31
3.8.3 偵測距離不確定性分析... 35
3.8.4 結論... 39
3.9 子計畫六:海底底質音響參數量測與分析 ... 40
3.9.1 研究目的... 40
3.9.2 研究要點... 40
3.9.3 地音模型的建立... 40
3.9.4 地音參數資料庫架構... 41
3.9.5 地音參數資料庫雛形... 42
肆、結論 ... 43
伍、致謝 ... 43
參考文獻 ... 44
圖目錄
圖 2-1 海洋聲學整合計畫研究架構 ...9
圖 2-2 聲納效能分析架構圖 ...10
圖 3-1 台灣西南海域海底地形圖及實驗測線示意圖(海科中心,1999)
...13
圖 3-2 台灣西南海域實驗配置圖 ...14
圖 3-3、聲源實際行進路線及接收載台飄移狀況圖 ...15
圖 3-4 訊號處理流程圖 ...16
圖 3-5 能量頻譜密度(Power Spectrum Density)圖 ...16
圖 3-6 接收聲學訊號圖 ...17
圖 3-7 迴響訊號圖 ...17
圖 3-8 重力式岩心採樣位置圖 ...19
圖 3-8 各岩心孔隙率與磁感率相關分析圖 ...20
圖 3-9 各岩心孔隙率與壓縮波速率相關性分析圖 ...20
圖 3-10 海研三號航線(黑線)圖與 CTD 水文測站(黑點)位置圖...21
Figure 3-11 Flowchart of simulation and experiment structure for source
localization ...22
Figure 3-12 Comparison of ANN training error (Case 2) ...24
Figure 3-13 Comparison of distance error (Case 2) ...24
圖 3-14、臺灣附近海域及 2006 年 OAJEX 實驗位置圖 ...26
圖 3-15 被動式水下聽音器 ...27
圖 3-17 春季各頻率量測值與估算值比對圖,
(a)為 500 Hz(b)為 1.5k Hz
...28
圖 3-18 計算格點(15 分經緯度間隔)示意圖 ...32
圖 3-19 台灣週邊冬季主動聲納偵測距離分佈圖 ...33
圖 3-20 台灣週邊春季主動聲納偵測距離分佈圖 ...33
圖 3-21 台灣週邊夏季主動聲納偵測距離分佈圖 ...34
圖 3-22 台灣週邊秋季主動聲納偵測距離分佈圖 ...34
圖 3-23 偵測距離統計分析網格位置示意圖 ...35
圖 3-24 台灣週邊海域 1 月份(冬季)主動聲納統計分析圖 ...36
圖 3-25 台灣週邊海域 4 月份(春季)主動聲納統計分析圖 ...36
圖 3-26 台灣週邊海域 7 月份(夏季)主動聲納統計分析圖 ...37
圖 3-27 台灣週邊海域 10 月份(秋季)主動聲納統計分析圖 ...37
圖 3-28 地形變動性(藍線)與聲納偵測距離不確定性(紅線)關係圖
...39
圖 3-29 地音參數模型架構示意圖。 ...41
圖 3-30 地音參數資料庫模型的示意圖。 ...43
中文摘要
由於國際局勢的改變,作戰環境的研究已由以往的大洋海域移轉至濱海海域,而台 灣位於第一島鏈中點,戰略位置重要,惟台灣周邊海域環境複雜,連帶的影響海軍艦艇 執行水下偵搜的聲納偵測效能,故有必要進行海洋聲學研究,以掌握海洋環境特性對水 下偵測效能之影響。聲納系統在不同作業海域會有不同偵測效能,主要是因為水下聲波 傳遞時受到海洋環境之特性不同而影響。聲納效能預估若只單靠數值模擬,無法完全掌 握因海洋環境變化而造成之聲納效能的改變,因而直接影響反潛作戰兵力有效部署與戰 術運用。本計畫主要目標為執行海洋聲學實驗,量測台灣西南海域之環境及音響參數, 提供各海域聲納系統之參數校正,以提昇聲納偵測效能,並進行作戰研究與不確定分 析,以瞭解多變的海洋環境對海軍艦艇水下偵測能力之影響,有效支援反潛作戰決策運 用。 本整合計畫有六個子計畫,分別為海洋水文、底質岩心、聲源定位、噪音方向性、 音傳實驗、音響參數應用及戰術模擬系統之研究。本報告為總計畫兼子計畫五一(音傳 實驗及聲納效能統計分析)之第三年成果報告,其餘子計畫成果僅摘要敘述,請參閱各 子計畫之成果報告。本計畫為三年期計畫,本報告為第三年成果,第一年主要工作為實 驗規劃、數值模擬,及實驗儀器購置。第二年執行實驗,第三年實驗數據分析、歸納及 應用。Abstract
Sonar performance changes when deploy in different water which is due to the difference of underwater propagation in the ocean environment. If the prediction of sonar performance are evaluated by numerical simulation only, it would have a big discrepancy with the actual operations in the real water, thus the deployment plan of ASW would not be effective. The main objective of this joint project is to execute the ocean acoustic experiment and to measure the acoustic parameters of the surrounding waters of Taiwan which will enhance sonar detections and supporting the decision making in ASW.
The joint project has 6 individual projects, namely Ocean hydrographic and bottom measurements, Source Localization, Noise directionality, Acoustic Propagation, the statistical analysis of acoustic parameters, studies the tactics simulation system. The research periods of this joint project are three years. The report is the result of third year. The major work of this year is to execute the ocean acoustic experiment.
壹、計畫目標
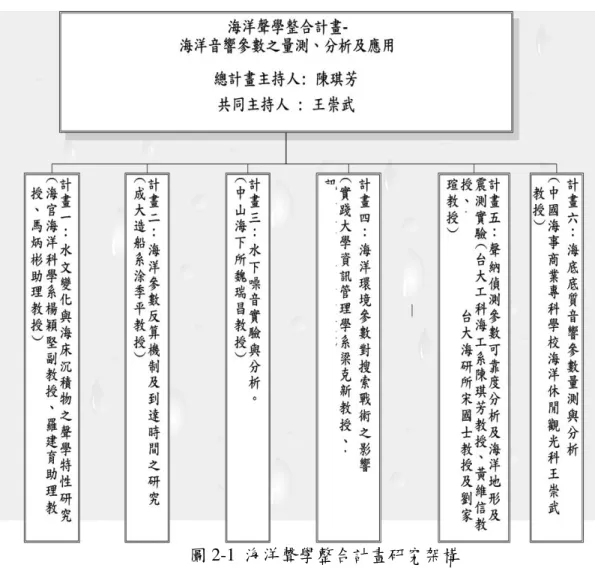
臺灣四面環海,位於第一島鏈之關鍵位置,亦是大陸板塊與歐亞板塊碰撞的交會 處,造成周邊海域海底地形環境極為複雜,濱海海域的環境變動性,不論在時間與空間 上其變化起伏均較大洋中高,尤其台灣位於歐亞大陸板塊邊緣,西有台灣海峽之大陸棚 地形,西南為海底峽谷,東北的沖繩海槽及東岸的深海盆地,使得週邊海域海底地形複 雜,加上自南方北上具有高溫高鹽的黑潮、南中國海流與北方南下具有低溫低鹽特性之 中國沿岸流等水文特性截然不同的洋流交會,形成世界上少有的複雜海洋環境。 孫子曰:「道天地將法,天者陰陽寒暑時制也...知天知地,勝乃可全。」 所謂的「天、地」指的就是作戰環境的運用,可知掌握環境的變動因素,即是決定作戰 致勝的關鍵因素。海峽對岸的中共,以其快速成長的經濟為後盾,積極擴張武力,並時 時向外宣稱不放棄以武力犯台,對我國家安全發展形成重大威脅。依據各項情報與中共 公開發言推斷,以潛艦封鎖台灣將是其武力犯台的可能手段之一。所以我海軍為防範中 共以潛艦對我實施封鎖,遂行反潛作戰,維持海上交通線暢通任務時,必需掌握聲納水 下偵測效能的變化特性,了解它們對海軍作戰的影響,從而利用有利之海洋環境條件, 提升聲納之偵測效益,有效提升海軍反潛作戰能力。本研究規劃海洋聲學整合實驗,以 及相關訊號處理與戰術分析之研究,分析台灣海域周邊有關之水下戰場環境,並校驗台 灣自力開發的聲納效能預測系統,進而評估水下聲波傳播受海洋環境變化的影響,以掌 握水下偵測特性,做為海軍反潛作戰運用之參考。 本整合計畫計有六個子計畫如圖 2-1 所示,分別為海洋水文,底質岩心、底層量測、 聲源定位、噪音方向性、音傳實驗、音響參數應用及戰術模擬系統之研究。本整合計畫 為三年期計畫,第一年主要工作為實驗規劃、數值模擬,及實驗儀器購置。第二年執行 海上實驗,第三年依據實驗結果進行實驗數據分析、歸納及應用,本報告為第三年之結 案成果報告。藉本整合計畫之執行,達到下列目標: 一、建立國內聲學實驗之設計、執行,聲音陣列訊號分析之能力以支援海軍反潛研發 能力。 二、國防水下作戰聲納系統之音響參數蒐集。 三、建立整合海洋環境、聲學實驗及偵測搜索模式之架構。貳、研究動機及現況
濱海海域的環境變動性,不論在時間與空間上其變化起伏均較大洋中高,尤其台灣 位於歐亞大陸板塊邊緣,西有台灣海峽之大陸棚地形,西南為海底峽谷,東北的沖繩海 槽及東岸的深海盆地,使得週邊海域海底地形複雜,加上黑潮、中國沿岸流與南中國海 流交會,形成世界上少有的複雜海洋環境。 雖然近十年來,我海軍武器裝備與載台性能均大幅提升,惟環顧我海軍所處在如 此複雜海域之作戰環境,必需掌握時間與空間上的變化特性,採取適當之戰術作為,始 能有效揮武器裝備效能。圖 2-1 海洋聲學整合計畫研究架構
2.1 動機
在國際局勢整體改變下,作戰環境的需求已從深水海域移轉至濱海海域,故美軍 自十數年前開始,即開始投入大量的經費與預算從事濱海海域的海洋環境調查與海洋 聲學實驗(Lynch, 2002)。由於濱海海域的環境特性隨著地區改變而變動性大,美軍 不只在美國本土週邊海域進行,甚至前往黃海、東海及南海等海域從事相關海洋環境 調查與海洋聲學的研究。 美軍除在中國大陸附近的濱海海域進行了數次海洋環境研究與聲學實驗外,並運 用衛星長期進行這些海域的環境偵測,尤其台灣的南北兩端海域是西太平洋的重要水 道外,更由於台灣周邊海域環境複雜,引發了美國海軍對於台灣週邊海域的高度關 注,自 2001 年由美海軍研究署(ONR,相當我國之國科會國防科技小組)主導之 ASIAEX 計畫開始,後續又連續於南海與台灣南方巴士海峽海域進行 VANS、NLIWI 等海洋聲學實驗,並規劃 2009 年於台灣東北海域進行 QPE 聲學實驗,我國海洋聲學 領域自參與美方台灣周邊海域研究的合作經驗中得到啟發(唐,2001, Newhall, 2001), 美海軍以其先進的模式技術與優異的武器裝備,針對其反潛作戰的需求,仍然應用其 學術界之能量,於南海海域從事海洋聲學實驗,以獲得該海域之實際音響參數,修正 相關模式參數,作為其艦隊遂行反潛作戰之依據。(Lynch et al, 2002) 台灣周邊海域,東北與西南海域,除地形複雜外,又加以黑潮流經此附近海域, 水文變動急促,因而巨大振幅的海洋內波(或內潮)盛行,進而影響此海域之音響參數 圖 1 海洋聲學整合計畫架構圖變化,其海域之獨特性無法假乎外人獲得,必須進行海洋聲學整合性研究,方能發揮 現有人力與裝備之能量,以收最大效果。爰此,海軍於 94~96 年度委託學術界執行「海 洋聲學整合計畫-海洋音響參數之量測、分析及應用」研究案,案內包括數個子計畫, 分別為海洋水文,底質岩心、震測量測、聲源定位、噪音方向性、音傳實驗、音響參 數應用及戰術模擬系統之研究,如圖 2-2 之架構圖。(陳等,2006) 圖 2-2 聲納效能分析架構圖
2.2 研究現況
聲音是水中能長距離傳遞能量的唯一工具,利用聲波偵測的聲納常用來探測海 洋,以瞭解海洋環境,聲納的工作原理是在被噪音所環繞的聲波回訊中找尋所要的訊 號;而聲納偵測效能的評估,則是以聲納方程式來計算偵測的效能。(Clay et al, 1977) 聲納方程式是以不同的聲納參數(sonar parameters)適當連結組合而成,以作為聲納 系統效能評估之依據。Etter(Etter, 1991)在”Underwater Acoustic Modeling”一書中 更明確地以圖 2-2 說明,聲納效能評估主要包括了海洋環境模式、水下聲學模式及訊 號處理等三大部分。 依據圖 2-2 之概念,本計畫規劃不同子計畫以進行相關研究項目如後: (一)實驗海域之海洋環境特性量測 聲音在海中傳遞受到各種物理特性影響,其傳遞路徑並非直線進行,為 瞭解正確聲波之傳遞狀況,必須進行各項與聲學有關之海洋環境參數觀測, 其內容包括: 1. 水文資料:量測海水之溫度鹽度與壓力(深度)之關係,以掌握聲波於水 下之傳遞路徑,一般以鹽溫深儀 CTD 或可棄式溫深儀 XBT 進行觀測。 2. 精確水深資料(Bathymetric charts):以測深儀記錄(Echo SounderRecords),海底地形的起伏,以瞭解聲波碰觸海底後之行徑路徑。
衰減係數聲速剖面梯度底質厚度……..等聲學性質,以分析聲波與底質間 之折射波及反射波的能量分佈關係。
4. 震測反射記錄(Acoustic Reflection Profile Records):利用聲波入射海 底沉積物後,因不同沉積物特性產生不同反射聲波強度,進而推算其地音 特性。
5. 大角度反射、折射量測(Wide-Angle Reflection and Refraction Measurements):利用空氣槍之高能量聲波進行海床陳積物構造之探測。 (二)背景噪音量測 利用不同水下聽音器記錄實驗海域之背景噪音,不論使用何種聲納,都必 須考慮到操作海域之音響環境,亦即該海域之音傳損耗以及背景噪音,背景 噪音為聲納操作不可或缺的參數。 (三)音傳實驗 利用不同之音源(聲納)拍發聲波,並以水下陣列記錄不同傳遞路徑之聲 波傳遞能量,以探討聲音能量在水中因海洋環境變化產生的能量傳播損失, 來評估聲納的偵測效能。 (四)聲納陣列定位 利用聲波訊號抵達聲納陣列聽音器之不同時間差,以波束形成技術(Beam forming)進行音源定位分析。聲納系統主要元件為水下陣列,目標辨識與定位 皆須仰賴精確的陣列位置,因此陣列及其元件定位之演算法為聲納系統目標 辨識的重要技術。 (五)偵測效能分析 以聲學模式為核心,利用聲納方程式為基礎,配合海洋環境資料,進行 聲納水下偵測效能之分析,並以統計方式計算海洋環境與聲納偵測效能間之 不確定性,掌握聲納偵測之可靠性。 (六)反潛作戰模式分析 利用數學模擬與作戰分析理論,配合偵測效能計算模組,進行反潛作戰 相關之作戰模式模擬,以分析各項戰術運用之效益,提供海軍反潛作戰決策 運用參考。 依據上述研究要點整合計畫規劃六個子計畫,並邀集相關領域之專家學者組成 研究團隊,成員計十一人,名單及專長如下: 子計畫一-水文變化及海床沈積物之聲學特性研究 楊穎堅(海軍軍官校應用科學系副教授,專長:海洋物理) 羅建育(海軍軍官校海洋科學系助理教授,專長:海洋沉積物) 馬炳彬(海軍軍官校海洋科學系助理教授,專長:水下聲學) 子計畫二-海洋參數反算機制及到達時間之研究 涂季平(成功大學造船及船舶機械系教授,專長:水下聲學、聲訊分析) 子計畫三-水下噪音實驗與分析 魏瑞昌(中山大學海下技術研究所助理教授,專長:水下聲學、聲訊分析)
子計畫四-海洋環境參數與反潛作戰模式結合研究 梁克新(實踐大學資訊管理學系助理教授,專長:聲納偵搜、作業系統) 子計畫五-聲納偵測參數可靠度分析及海底地形與震測分析 劉家瑄(台灣大學海洋研究所,專長:地球物理、海洋震測) 宋國士(台灣大學海洋研究所,專長:地球地質,海洋地形量測) 黃維信(台灣大學工程科學及海洋工程學系教授,專長:水下聲學) 宋家驥(台灣大學工程科學及海洋工程學系教授,專長:水聲感測器製作) 陳琪芳(台灣大學工程科學及海洋工程學系教授,專長:水下聲學) 子計畫六-海底底質音響參數量測與分析 王崇武(海軍備役少將,台北海洋技術學院副教授,專長:水下聲學) 本研究團隊由 2001-2004 執行亞洲海域國際聲學實驗(ASIAEX)整合計畫之成員 及 85-86 年度國防科技學術小組計畫成員為基礎而擴大,在分擔帶領航次,及訊號分析 研究工作上,已建立良好互動及默契。總主持人陳琪芳教授擔任 ASIAEX 整合計畫總 主持人,其領導能力已獲得大家認可。共同主持人王崇武教授為海軍備役少將,水中 聲學博士,曾任達觀艦第一任艦長,國防工業基金會執行祕書長,為本計畫與海軍協調 溝通最佳人選。各子計畫主持人在其所執行之子題的專業能力已由 ASIAEX 整合計畫 及其國科會專題計畫研究成果證明。
參、研究內容
在總計畫主持人、共同主持人主導及整合下,各子計畫主持人共同規劃執行海上實 驗,各子計畫間並且共享儀器,資料及研究船航次,藉由定期之聚會研討研究進度與彼 此之協調合作,及與海軍合作單位討論報告研究進度,以確認研究進度,符合海軍需求。 由總計畫下購置之主要聲納陣列接收系統也為所有參與學者使用,共同分享所記錄之聲 訊。此外,子計畫一與五執行海洋環境水文錨錠及海床性質量測提供子計畫二、三及五 之噪音、定位及聲納偵測參數可靠度分析所需之環境參數。子計畫四則以子計畫二、三 及五之成果應用於搜索戰術之規劃研究,以下就共同執行之海上實驗及各子計畫之內容 擇要說明(詳細之研究內容與成果請參閱各子計畫之成果報告):3.1 西南海域驗證實驗
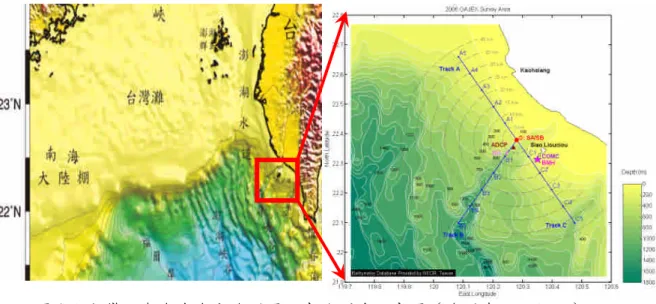
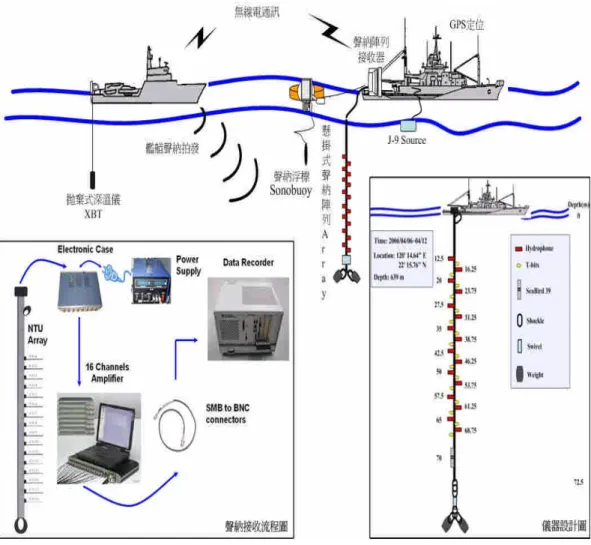
台灣鄰近海域中,東北海域、西南海域因水文條件與戰略因素將成為傳統的反潛 水域,本整合型計劃第一年(民國 94 年)已於台灣東北海域(東經 121 ゚00’至 122 ゚ 18’北緯 24 ゚54’至 25 ゚06’),進行三條不同的測線之音傳實驗,今年(第三年度) 也已完成台灣西南海域之實驗,實驗所紀錄資料經由各子計畫分析處理,並透過總計 畫整合方式,統合研究成果,提供反潛作戰應用參考。 3.1.1 西南海域環境簡介 台灣西南海域在地理特性上最為人知的就是高屏峽谷,而高屏峽谷與其它峽 谷不同之處在於是整個峽谷上並無其它的分支峽谷。另外,由於此海域部分為大 陸棚邊緣,大部分水深均超過 1000 公尺。高雄港外 10 浬水深已超過 200 公尺, 再向西南,則水深由 200 公尺遽降至 1000 公尺以上,由下圖 3-1 可以清楚的了解 該海域之地形。圖 3-1 台灣西南海域海底地形圖及實驗測線示意圖(海科中心,1999) 西南海域的海洋環境主要受大陸沿岸流、黑潮及南海海流之影響,有週期性 的變化。在高屏峽谷內,更有內潮的現象;即不同水層內的海流運動方向都不太 一樣,且潮流的強度隨深度的增加而增強,流速均在 1.08 公里/小時以上,實測 的最高記錄是 4.86 公里/小時。更特別的是本區的潮流均發生在深度 170 公尺以 下,且通常以 12 小時為週期,作順逆谷峽之交換運動(王,1993)。而在底質 特性方面,西南海域最高聲速出現於東北側陸棚,壓縮波速 1600±63 公尺/秒,衰 減係數 1.04±0.355(dB/m/kHz),統體密度 1.98 公克/立方公分;在高屏溪出海口附 近,壓縮波速 1552±28 公尺/秒,衰減係數 0.568±0.2(dB/m/kHz),統體密度 1.93 公克/立方公分;其它地區,壓縮波速 1556±48 公尺/秒,衰減係數 0.628±0.367 (dB/m/KHz),統體密度 2.04(g/cm3)(陳,1996,王,1997)。 3.1.2 西南海域音傳實驗簡介 與東北海域之實驗相似,西南海域實驗同樣也選擇了三條測線,分別為測線 A:淺水區(約 500M 等深線);測線 B:斜坡區,高屏峽谷;測線 C:峽谷區,越 過枋寮狹谷,如圖 3-1。藉由上述三種地型比較音傳之間的差異性。在規劃三條 不同類型的測線上,利用一高頻聲源發射固定的聲波,同時逐漸沿測線駛近接收 船然後再行進至下一條預定的測站,三條測線的交點 R 為接收船的位置,在接收 船上的聲納陣列接受由聲源傳遞過來的聲波訊號,並由台大水下聲學實驗室自製 組裝的後續接收系統完成整個記錄。此外,三條測線上分別有標示圈的點位為發 射聲波的船在行進的同時,沿途每隔一定的距離以 XBT 量測當時之海水溫度, 作為理論模型中輸入聲速的參考值。 在此實驗中以 DAQ 卡,進行每個頻道 72kHz 的取樣點及 24bits 的解析度, 並於聲納陣列的最下方處放置一個量測深度與溫度的儀器(SeaBird 39),實驗配置 如圖 3-2;在聲源的部分,頻率也改為更高頻的聲源(約 24kHz),頻寬為 100 Hz, 脈衝(Pulse)訊號長度 0.08 秒,訊號間格為 15 秒,深度 5 公尺。
圖 3-2 台灣西南海域實驗配置圖 3.1.3 實驗結果與訊號分析 原實驗規劃海域及點位如圖 3-1,實驗分別在 10/5、10/18 及 10/25 三個實驗 日重複執行。其中 O 點為接收點,聲源則按照 A、B 及 C 測線移動。 聲源實際行進路線及接收載台飄移狀況如圖 3-3 所示。在圖 3-3 中,由左至 右((a)、(b)及(c))分別為 10/5、10/18 及 10/25 之行進路線及漂移情形,聲源測線執 行順序為測線 A(藍線)、測線 C(黑線)、測線 B(紅線),各測線執行時間約 3 小時。 此外,各圖中藍色、黑色及紅色圓圈標記代表接收載台於各測線執行時之漂移情 形。
(a) (b) (c) 圖 3-3、聲源實際行進路線及接收載台飄移狀況圖
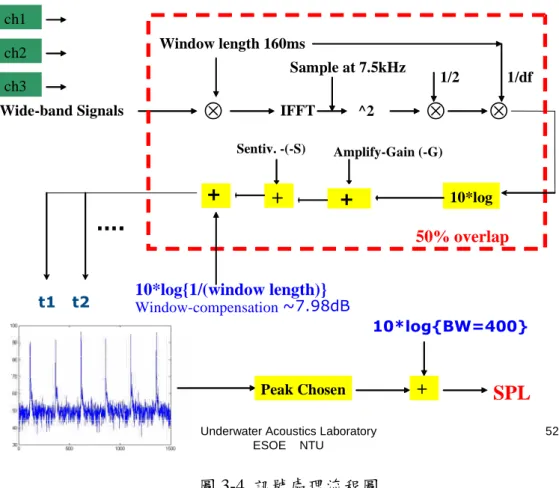
在計算傳播損耗時,必須先處理接收訊號,計算接收器處之接收訊號強度(聲 強級,Sound Pressure Level),再以聲源強度扣除計算得之聲強級,即可得傳播損 耗。聲學資料之信號處理理論如下式:
實際處理過程如圖 3-4 之架構,將聲學資料以 160 毫秒之時間長度依序(50% 資料重疊)取出,並使用圖 3-4 紅色框架內的流程計算此時間序列之能量頻譜密度 (Power Spectrum Density),如圖 3-5 所示。將中心頻率 7.5 千赫茲之能量密度記錄 下來,並考慮 400 赫茲之頻寬,則可得此頻率範圍內之聲學資料。圖 3-6 為接收 聲學資料之範例,此資料之接收時間為 2006 年 10 月 5 日 11 點 33 分,圖中六個 訊號峰值即為六個不同時間之接收訊號強度。此圖為歷時一分鐘之能量頻譜密 度,在中心頻率 7.5 千赫玆處可見到明顯的訊號能量,各訊號間隔 20 秒。 0 100 200 300 400 500 600 700 800 1200 1300 800 0 Longitude L a ti tu d e A1 A2 A3 A4 A5 B5 B4 B3 B2 B1 C1 C2 C3 C4 C5 120.1 120.2 120.3 120.4 120.5 22.1 22.2 22.3 22.4 22.5 22.6 22.7 0 100 700 800 1200 1300 1400 800 0 A5 A4 A3 A3 A2 A1 B1 B2 B3 B4 B5 C5 C4 C3 C2 C1 Longitude L a ti tu d e 061018 120.1 120.2 120.3 120.4 120.5 22.1 22.2 22.3 22.4 22.5 22.6 22.7 0 100 200 300 0 Longitude L a ti tu d e A5 A4 A3 A2 A1 B1 B2 B3 B5 C5 C4 C3 C2 C1 061025 120.1 120.2 120.3 120.4 120.5 22.1 22.2 22.3 22.4 22.5 22.6 22.7
n n n n n T n n n n n n n n m n m m m n n n n n n A choice window T T A dt t f T A t f A t f A m n t f t f t f A t f A t p t f A t p 2 2 2 2 2 2 2 2 2 2 1 ) 2 ( 1 ) 2 ( cos 1 ) 2 ( cos ) 2 ( cos , 0 ) 2 cos( ) 2 cos( ) 2 cos( ) 2 cos( ) ( ) 2 cos( ) ( 2007/1/17 Underwater Acoustics Laboratory ESOE NTU 52 Wide-band Signals Window length 160ms
IFFT ^2
1/2 Sample at 7.5kHz
1/df 50% overlap t1 t2 + 10*log 10*log{1/(window length)} Window-compensation ~7.98dB….
Peak Chosen + 10*log{BW=400}SPL
ch1 ch2 ch3 + Amplify-Gain (-G) + Sentiv. -(-S)2007/1/17 Underwater Acoustics Laboratory ESOE NTU 52 Wide-band Signals Window length 160ms
IFFT ^2
1/2 Sample at 7.5kHz
1/df 50% overlap t1 t2 + 10*log 10*log{1/(window length)} Window-compensation ~7.98dB….
Peak Chosen + 10*log{BW=400}SPL
ch1 ch2 ch3 + Amplify-Gain (-G) + Sentiv. -(-S)2007/1/17 Underwater Acoustics Laboratory ESOE NTU 52 Wide-band Signals Window length 160ms
IFFT ^2
1/2 Sample at 7.5kHz
1/df 50% overlap t1 t2 + 10*log 10*log{1/(window length)} Window-compensation ~7.98dB….
Peak Chosen + 10*log{BW=400}SPL
ch1 ch2 ch32007/1/17 Underwater Acoustics Laboratory ESOE NTU 52 Wide-band Signals Window length 160ms
IFFT ^2
1/2 Sample at 7.5kHz
1/df 50% overlap t1 t2 + 10*log 10*log{1/(window length)} Window-compensation ~7.98dB….
Peak Chosen + 10*log{BW=400}SPL
ch1 ch2 ch3 + Amplify-Gain (-G) + Sentiv. -(-S) 圖 3-4 訊號處理流程圖0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2 60 70 80 90 100 110 120 130 140 150 Time (min) S P L (d B re f 1 P a ) SPL @ 20061005 11:33 圖 3-6 接收聲學訊號圖 3.1.4 迴響 在資料分析之過程中,吾人發現聲學資料包含有明顯的迴響現象,因此針對 迴響特別進行分析。圖 3-7 為接收訊號,此接收訊號包含有明顯之迴響現象,因 此訊號延遲時間高達十秒以上,遠大於聲源訊號之 160 毫秒。吾人定義迴響之起 始點為接收訊號之第二個峰值,而迴響長度為訊號強度由迴響起始點降至噪音級 (Noise Level)之時間長度,如圖 3-7 之紅色線段。 35 40 45 50 55 60 60 70 80 90 100 110 120 130 140 150 Time (s) S P L (d B re f 1 P a )
Reverberation Curve
35 40 45 50 55 60 60 70 80 90 100 110 120 130 140 150 Time (s) S P L (d B re f 1 P a )Reverberation Curve
圖 3-7 迴響訊號圖 根據上述迴響長度之定義,資料分析步驟如下: 1. 先將聲學資料作移動平均(Moving Average),以濾掉高頻之訊號變動,方便 判斷訊號強弱。2. 利用聲源訊號到達前之ㄧ分鐘,計算背景噪音強度。 3. 針對每個接收訊號計算其迴響長度,並做兩分鐘(六個訊號)之平均。 3.1.5 聲源強度及指向性 為瞭解聲源艦音源拍發之強度及其方向性,於海上實驗期間進行聲源方向性 與聲壓強度校正實驗。聲源艦於距離接受器約 4 千碼位置(此為兩艦要求之安全距 離)做定點轉向拍發,每四十五度方位為一實驗單位,將全方位(三百六十度)切分 為八方位(各四十五度),每方位拍發相同 6 組脈衝,歷時兩分鐘,因此整體實驗 樣本採樣時間約為二十分鐘。此實驗結果將可提供使用單位更為精準之聲壓強度 值與艦首拍發之方向位準。
3.4 子計畫一:水文變化及海床沈積物之聲學特性研究
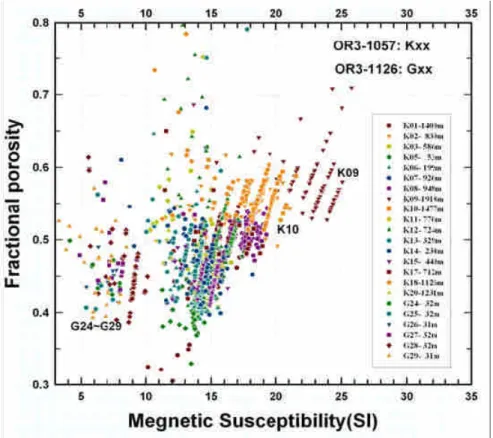
3.4.1 研究目的 本整合型計畫著眼於台灣週邊海域水下作戰之音響參數量測與分析,由於聲 音在海中的各種現象與海洋環境息息相關,所以環境特性之量測極為重要。其所 需之海洋環境資料為 (1)水文資料;(2)精確水深資料(Bathymetric charts);(3)沉積 物採樣;(4)海底底質聲學性質,其中水文變化及海底底質對於聲波傳遞之影響, 即是本子計畫的主要工作, 3.4.2 研究要點 本計畫所得到之參數將提供整合型計畫進行底質資料-結合水文資料-音 傳模型-音傳損耗-反潛作戰模式之計算。 海底底質聲學性質即是有關海底對從海水入射聲波的反射和散射,以及聲波 在海底沉積物中的傳播速度和衰減等特性。海底聲波的傳播,以淺海較為複雜。 其中又以海洋水文環境的快速變化(如:內潮、內波等),會影響聲波的傳遞與損 耗。尤其台灣週邊海域的特殊水文結構,會使得聲波傳遞至海底。因此,海床的 結構與沉積物組成,亦會影響聲波的傳遞特性。一般認為海底沉積物中的聲波傳 播速度,與聲波頻率沒有明顯的關係,但與底質顆粒和結構有關。例如,在極細 顆粒或高孔隙率的稀泥中,傳播聲速很接近或可能低於海水中的聲速;但在較密 實的沉積物中,聲速會隨粒徑的增加和孔隙率的減小而遞次加快,且高於海水中 的聲速。在固結的沉積層中,聲波除縱波外,還有橫波傳播。沉積物中的聲波衰 減,主要由沉積物的黏滯性和摩擦作用所產生的,與沉積物的粒徑和孔隙率也有 密切關係。細砂、砂質粉砂和粉砂質砂的聲波衰減最大。聲波衰減程度也隨會聲 波頻率的增加而增加。海底聲波的反射和散射,主要和沉積物分層結構有關,也 與海底表面的粗糙程度有關。若海底表層中的聲速低於其上海水中的聲速,這種 海底稱為低聲速海床;反之,則稱為高聲速海床。一般說來,低聲速海床的反射 本領低於高聲速海床。此外,海底的聲波反射損失,會隨聲波頻率的增加而增加。 聲波入射後的行為與海底類型有關,對於低聲速海床﹐會有一全透射角,聲波在 此角度下入射,多數聲能透射入海底;若為高聲速海床,則存在一個全反射角(關 與包, 2002)。 此外,海洋聲波受海洋水文變化影響甚鉅,其中又以內波或內潮最為明顯。台灣周邊海域,海底地形變化複雜,內波與內潮運動盛行。故再台灣周邊海 域進行海洋聲學研究,一定要考慮內波與內潮對其之影響。 本計畫配合總計畫執行三年,第一年著重於量測儀器之安裝設定,進行台灣 西南海域、巴士海峽之海床沉積物採樣與實驗分析;第二、三年繼續海床沉積物 採樣分析,並在研究海域佈放錨碇系統與海流儀,長期蒐集海流及水文資料,以 及利用研究船於研究海域蒐集海洋環境與海洋背景音響資料。 3.4.3 岩心資料分析成果 本計畫已經進行了 17 之岩心採樣並完成實驗室分析。這 17 支重力式沉積物 岩心,各岩心之水深為: K01 (1400m)、K02 (830m)、K03 (586m)、K05 (53m)、K06 (199m)、K07 (920m)、K08 (948m)、K09 (1918m)、K10 (1477m)、K11 (770m)、 K12 (724m)、K13 (329m)、K14 (238m)、K15 (440m)、K17 (712m)、K18 (1126m) 與 K20 (1231m)。各岩心皆以 1 cm 間隔量測一筆資料。岩心採樣位置從高雄至恆 春近岸之陸棚區向西南延伸至陸坡,水深範圍涵蓋 53~1918 m (圖 3-8)。量測得到 之初始數據,需經岩心管徑、採樣水深、鹽度與底水溫度修正後,換算成壓縮(P) 波速率、統體密度、磁感率、聲阻抗值與孔隙率,共各項聲學及物理參數。詳細 內容請參閱子計畫之成果報告。 圖 3-8 重力式岩心採樣位置圖 3.4.4 沉積環境探討 研究區底質之孔隙率與磁感率略呈正相關性(圖 3-9),深水區(1500~2000m) 底質之磁感率比最淺區高 3 倍,孔隙率也高出 30 %。圖 3-10 顯示航次 OR3-1057,OR3-1126 各岩心孔隙率與壓縮波速率之相關性。壓縮波速率明顯地隨 著孔隙率增加而減低。 另外,深水區之統體密度、壓縮波速率與聲阻抗值明顯較低。由陸棚過渡到 陸坡至深水區,底泥物理及聲學性質差異如此大,推測粒徑分佈與顆粒排列方式 可能是決定性因素。本研究區海底地形起伏大,沉積物來源相似,主要是高屏溪、 東港溪和枋山溪輸出之泥砂,受到海中生物殼屑以不同比例相混合。接近河口之 淺水區者可能粗顆粒比例較高,而愈往深水區,砂比例降低,使得底質聲學與物 理參數均隨水深增加而具規律性變化(陳儀清,1977)。此由孔隙率遞增與濕比重遞 減可推知。深水區有較高之磁感率,此現象與湄公河口外之選他陸棚坡相反,可 能因湄公河口外深水域較多生物殼屑稀釋效應,而降低磁感率。
圖 3-8 各岩心孔隙率與磁感率相關分析圖
除了粒徑之外,顆粒排列方式、沉積物碳酸鈣與有機質含量,均會影響 P 波 速度與其他參數。未來分析岩心之礦物組成、粒徑分佈型態,可以進一步探討彼 此之相關性。由於除了粒徑之外,顆粒排列方式、沉積物碳酸鈣與有機質含量, 均會影響 P 波速度與其他參數。本文提供一個檢視沉積環境與底質聲學性質相關 性之機會,可作為未來探討複雜沈積環境之基礎。 3.4.5 水文資料調查 本計畫配合總計畫之海研三號實驗航次,於 2007 年 9 月 27~20 日期間,利 用其船上的溫鹽深儀(Conductive-Temperature-Depth, CTD)於固定的航線上、在固 定的測站(如圖 3-10)進行重複的 CTD 量測,並以此測得的時間序列資料,估算 水文資料的潮汐變化。 圖 3-10 海研三號航線(黑線)圖與 CTD 水文測站(黑點)位置圖 在三天的觀測中,第一天進行 A4X-A2X-OX-C2X-C4X 航線觀測,第二天進 行 B4X-B2X-OX-D1-D2 航線觀測,第三天則是重複第一天的觀測。三天中,共 進行了 95 次的 CTD 觀測。 利用調和分析方法分析全日、半日潮汐變化,首先資料要超過一天以上,再 者資料點分佈最好能平均分配在各時間點上。從 B2 與 D1 兩測站的分析結果得 知一天的資料已可大致分析出全日與半日變化;但是在 A4、B4、C4、D2 等四 端點測站,由於進行船測時因時間緊湊,無法進行時間延遲,以致造成端點測站 的固定觀測時差,無法滿足近似隨機的條件。所以,雖然各個時間點的分析非常 接近觀測資料,但是完全的估算整體變化趨勢,以致有多估的現象。除了此四個 端點測站外,本估算方法可大致估算出此海域的水文變化。於是,利用此方法估 算此海域聲速變化後,供其它子計畫使用。
3.5 子計畫二:海洋參數反算機制及到達時間之研究
3.5.1 研究目的
The project presents a method of passive localization for acoustic source in shallow water based on Ray acoustic theory. Ray acoustic theory is used to establish underwater coustic channel and to analyze physical quantities, arrival time and arrival angle, received by sensors. Then, mutual relationship of rays between sources and receivers is determined by using artificial neural network (ANN) for source localization.
3.5.2 研究要點
There are two approaches for the inverse computation of source localization. One is to measure the arrival time and arrival angle by using a hydrophone. The other is to evaluate sets of arrival angles by using array hydrophones. Both these inverse
approaches are established by ANN training to compute sound source location. In this study, the inverse computational method is not only used in shallow water, but it is also verified by using a non-trained source to proof its accuracy and reliability
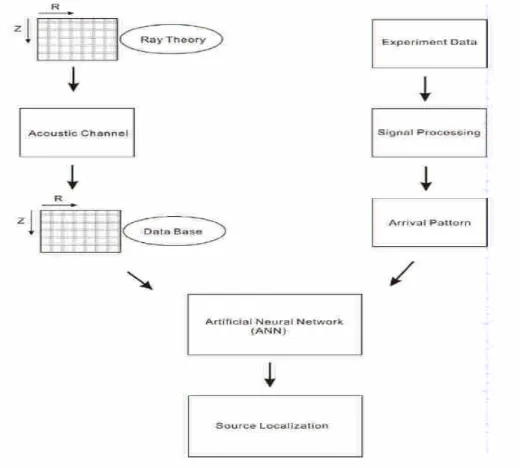
In this present study, Ray theory is used to express propagation of sound wave in shallow water. The physical quantities such as: arrival time and arrival angle, are evaluated by use of ray theory to establish data basis and are used as inputs in artificial neural network. The network with input of ray physical quantities and output of source location is obtained. Therefore, when arrival time and arrival angle are measured or simulated as input, inversion of source location can be achieved by backward propagation network (BPN). The flowchart of the entire simulation and the practical experiment is shown as figure 3-11
3.5.3 模擬成果分析 Test cases
The range distance error shown in Eq. 11 defines as absolute value of actual sound source distance minus inverse computed distance from ANN divided by actual sound source distance in the horizontal direction. The depth distance error defines as absolute value of actual sound source distance minus inverse computed distance from ANN divided by actual sound source distance in vertical direction.
Case 1
The source is 18765m apart in range, and the hydrophone is 40m in depth. The acoustic rays that the sensor receives are analyzed to find the highest pick value of arrival angle and travel time of rays, and then replace the results as inputs of artificial neural network then the outputs (range and depth) are calculated by the network. There is 1m difference of the inverse calculation in the range distance, which is an error of 0.0053%. A difference of 2.85m of the inverse calculation in the depth of source is an error of 2.85%.
Case 2
Three sources are located at 26670m, 27002m, and 26000m apart in range respectively, and three hydrophone receivers are located at 30m, 45m, and 100m in depth respectively. The acoustic rays that the hydrophone receive are analyzed to find the highest pick value of arrival angles from VLA 16 pairs of rays and then replace the results as inputs of artificial neural network then the outputs are calculated by the network. There is 33m difference of the inverse calculation in the 26670m range distance, an error of 0.124%, and a difference of 0.329m of the inverse calculation in the depth of source is an error of 0.165%.
There is 55m difference of the inverse calculation in the 27002m range distance, an error of 0.204%, and a difference of 4.569m of the inverse calculation in the depth of source is an error of 2.285%. There is 27m difference of the inverse calculation in the 26000m range distance, an error of 0.104%, and a difference of 0.567m of the inverse calculation in the depth of source is an error of 0.284%.
Figure 3-12 presents the variation of the training error with respect to the number of hydrophone receivers. That result indicates the more numbers of hydrophone receivers for arrival angles increase, the fewer errors occur. The x axis means the number of hydrophone receiver. Each hydrophone receiver has 420 arrival angles, and the average value is calculated as the arrival angle at the hydrophone location. Those physical quantities are used as input data of BPN. The y axis presents the mean square error of training rate by ANN.
Figure 3-12 Comparison of ANN training error (Case 2)
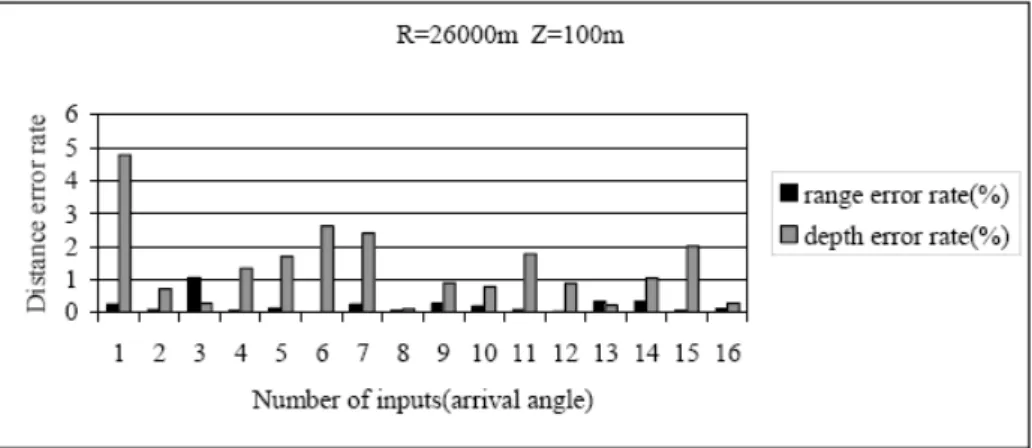
Figure 3-13 shows the horizontal and vertical distance error with respect to
number of hydrophone receivers. The x axis means the number of hydrophone receiver. Each hydrophone receiver has 420 arrival angles, and the average value is calculated to represent the arrival angle at the hydrophone location. Those physical quantities are used as input data of BPN. The y axis presents the distance error rate of inverse calculation by ANN. The black color means the range error rate and the gray color means the depth error rate. The horizontal distance error is less than 100m and vertical distance error is less than 10m. The distance error rates below 5% are acceptable.
Figure 3-13 Comparison of distance error (Case 2)
3.5.4 結論
This research is to develop a new inversion procedure for source localization in shallow water. In this research, the physical quantities (such as: arrival time and arrival angle) of acoustic ray are evaluated by ray theory. And these are cooperated with neural networks to calculate the acoustic source position. Main conclusions are generalized as the followings:
3.5.4.1 Two inverse approaches:
In the present study, two inverse approaches for the source of localization are present. One is to measure the arrival time and arrival angle by using a hydrophone. The other is to evaluate sets of arrival angles by using array hydrophones. These inverse approaches by ANN can be applied to calculate the ocean environment parameters.
In this article, we launch the acoustic ray by controlling the discharged angle in the scope of ±11°. From ray number - time distributed chart, it can prove that the discharged angle in the scope of ±11° is suitable and feasible. Therefore, it will reduce many unnecessary operationsand savecomputer’sload ifwechoosethescopeofray discharged angle appropriately. Besides, the results indicate that control of the
discharged angle reduces the influence of multiple paths in the sea effectively from the relationship of the discharged angle By controlling the discharged angle, the threshold of number of ray reflections will filter out the rays whose energy were dissipated because of too many reflections.
3.5.4.3. The effect of grid size of acoustic source:
The initial simulated grid is divided into one division per 100 meters in range (away from the receiver 18 to 20 kilometers for case 1 and 25.26 to 27.26 kilometers for case 2) and one division per 10 meters in depth (10 to 120 meters in depth for case 1 and 2.3 to 192.3 meters in depth for case 2). The results indicate good inverse
mechanism to calculate the distance between source and receiver in range and in depth. Also, it proves that the more divided grids, the more precisely we can construct the net. Therefore, it is concluded that if we had enough operating time to set up more
extensive grids, then the inverse calculating mechanism of source position can be more accurate.
3.6 子計畫三:水下噪音實驗與分析
3.6.1 研究目的
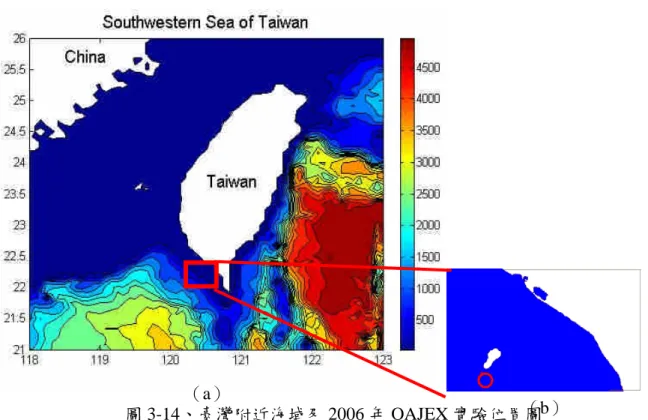
聲納系統可分為主動式聲納(Active Sonar),和被動式聲納(Passive Sonar) 兩個系統,主動式聲納系統是由聲源拍發訊號,當聲波遇到目標物或是海洋環境 邊界影響,所產生的反射,進而進行接收訊號,達到偵測的目的。由於淺海之環 境噪音變動性大,噪音位準大小將會左右著聲納偵測的範圍,因此對特定海域的 環境資料有足夠的了解,就顯得相對重要。 3.6.2 研究要點 本子計劃配合總計畫在 2007 年於台灣西南海域,小琉球嶼附近進行海洋聲 學整合實驗(OAJEX),進行水下噪音資料蒐集,主要海洋環境噪音資料來自被 動式水下聽音器系統(Passive Acoustic Listeners, PALs)。海洋環境噪音與當地 海域的氣候有密切關係,當風速達到一定大小將影響著環境噪音。本文資料量測 期間,有 4 個颱風影響此實驗區,將做深入探討。 3.6.3 實驗位置 本次實驗在台灣西南海域靠近小琉球嶼附近位置,時間為 2006 年至 2007 年 間,正確位置請見圖 3-14,由圖 3-14(a)所示,圖中紅色實線所框出來為儀器 佈放位置,圖二(b)中紅線圈起來為實際的佈放點位及浮標位置,其佈放深度 約為 82 公尺。
圖 3-14、臺灣附近海域及 2006 年 OAJEX 實驗位置圖 錄音資料由表一可清楚看出其資料時間,資料儲存總天數共有 164 天。為了 將資料分為春夏秋冬 4 個季節做探討,在此分別以 4、5 月份代表春季,6、7、8 月份代表夏季,10、11 月份代表秋季,12 月份則代表冬季,其中春季資料天數 共有 34 天,夏季共有 66 天,秋季共有 38 天,冬季則有 12 天。
表一、環境噪音資料天數
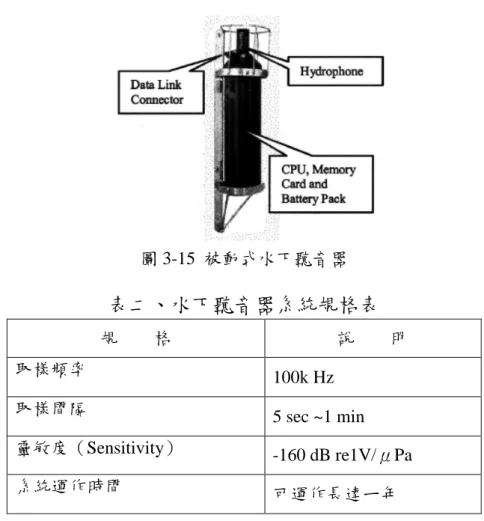
春 夏 秋 冬 月份 4 月 5 月 6 月 7 月 8 月 10 月 11 月 12 月 日期 21~30 1~24 14~30 1~31 1~18 12~31 1~30 1~12 天數 10 24 17 31 18 20 30 12 3.6.4 實驗儀器 被動式水下聽音器系統中,包含的組件有低雜訊水下麥克風 ITC-8263 (Hydrophone)、訊號放大器、控制電路面板,電池組,如圖 3-15 所示,儀器長 度約 76 公分,其中水下麥克風等儀器規格則可參考表二所示,儲存的頻率則是 先設定好,從 0~3k Hz 以每 200 Hz 平均為存取一個頻段,而從 3 至 50 kHz,則 是每 1 kHz 平均存取為一個頻段(Ma & Nystuen, 2005)。(a)
圖 3-15 被動式水下聽音器
表二、水下聽音器系統規格表
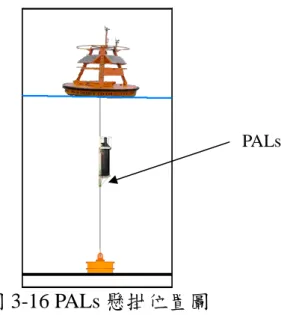
規 格 說 明 取樣頻率 100k Hz 取樣間隔 5 sec ~1 min 靈敏度(Sensitivity) -160 dB re1V/μPa 系統運作時間 可運作長達ㄧ年 儀器系統取樣頻率為 100 kHz,取樣時間則會因為所感應之訊號不同,如當 儀器偵測到不同氣泡大小產生之訊號等,啟動錄音間隔會改變為每 1 分鐘錄一筆 資料或是 3~4 分鐘,而使得錄音存取的時間有所差異。當有突發性或不連續等聲 源訊號,系統判斷後會作刪除,選擇環境噪音並獲得信號的頻譜,而當訊號未達 設定值時,則會有 8~9 分鐘處於休眠狀態,等待訊號達到設定值再行紀錄。當被 動式水下聽音器系統記錄這些頻譜,而不是聲壓值的時間序列,其目的是為了能 節省記憶空間,以達到長時間的量測,內部還有數位式過濾器,高通濾波 300 Hz, 低通濾波 40 kHz,其目的在減低來自低頻及高頻部份的雜訊。本研究風速資料取得是由近海水文中心(Coastal Ocean Monitoring Center, COMC)佈放於小琉球的資料浮標所紀錄之資料(國立成功大學近海水文中心), 且被動式水下聽音器系統即懸掛於近海水文中心的資料浮標下,如圖 3-16 所示, 而風速資料是取每小時的最後 10 分鐘平均風速,以此平均風速來表示該小時之 風速。
圖 3-16 PALs 懸掛位置圖
3.6.5 噪音位準估算 利用對台灣西南海域長時間序列的觀察,統計出環境噪音之分佈趨勢,藉由 聲壓位準與風速資料的迴歸分析,求得此海域之估算噪音位準參數,可在無聲學 儀器佈放量測時,得到此海域之環境噪音分佈情形。將各結果列於圖 3-17 中,可 提供此海域環境噪音之參考值。圖 3-17 為春季各頻率的量測資料與估算值比對, 藍色為原始聲壓位準,綠色則為估算值,圖中紅色虛線表示風速在 5 m/s 所估算 出之聲壓位準大小,圖中可發現越高頻段之估算值越和實際值較相近,越高頻段 估算值與原始聲壓位準差異越小,也證實了高頻率主要受風速所影響。 圖 3-17 春季各頻率量測值與估算值比對圖,(a)為 500 Hz(b)為 1.5k Hz 3.6.6 檢討與建議 本實驗探討了台灣西南海域整年度之環境噪音,在分析結果中,春季與夏季 500 與 1.5k Hz 受到不明高位準訊號影響,平均聲壓值比秋冬兩季高出許多,500 PALs 76.3 63.6(b)
(a)
Hz 約高出約 10 dB,而 1.5 kHz 也高出約 5 dB。四季中 2.4k、3.6k Hz 這兩個較高 頻段整體平均位準並沒有太大差異,平均位準都在 60 dB 左右,且其變動也在 3 dB 上下,且經由各個月份聲壓位準的分佈發現,在 3.6 kHz 的聲壓位準分佈都較其 他頻段集中,也觀察到聲壓位準隨著頻率增加而降低。 在沒有受高風速影響下,環境噪音之聲壓位準皆處與平穩狀態(除春夏兩季 500 與 1.5k Hz 受到不明高位準訊號影響),而在颱風影響前後,各頻率之聲壓位 準皆有明顯變化。在珍珠颱風期間,各頻率聲壓位準約提升 3~5 dB,碧利斯颱風 則在各頻率聲壓位準提升約 5~8 dB,凱米颱風則是在 2.4 與 3.6 kHz 的聲壓位準 影響較大,約提高 5 dB 唯在寶發颱風期間,聲壓位準不升反降,推測是寶發暴風 範圍影響時間較短,而沒有影響到此聲壓位準,此原因將有待解釋。 藉由本實驗可了解此海域,在不同時段環境噪音的變化及分佈情形,也利用 迴歸分析得到估算聲壓位準之參數,將可有效的預估此海域環境噪音隨時間的變 化,增加對此海域聲壓位準的了解,有效提升聲納效能系統,本文在冬季中,由 於資料筆數取得較少,所以會有較高的偏差出現,需再加強更多長時間之觀測, 才可修正冬季的誤差值,將可建立在此海域有更完整的預估值。 台灣由於處於重要之軍事位置,對於台灣四周海域及淺水海域,環境噪音之 影響因素非常多,都必須加以了解及掌握,本文只針對了風速加以探討,如在對 其他影響如船舶、潮汐及黑潮等因素加入分析,相信可更了解台灣四周海域的環 境噪音之機制,如此才能有效提昇聲納的偵測效能,若我們得到此海域更多海洋 相關資訊時,本文資料中的不明高位準訊號影響,或許可再深入做探討,進而找 出其影響來源。 海洋環境變化大,不只針對風速影響,對於海洋環境噪音還必須依靠更多 海洋物理資料作佐證,淺海環境由於地域特性,須加考慮附近船舶、海洋生物、 岸邊工廠等暫態性聲源影響,而在淺海環境中,Grant B. Deane 也提到,風浪產 生的碎波、白浪風、變動產生的壓力變化等,也都會因為海域的不同而有所差異, 所以必須藉由更多量測及分析資料,聲納效能才能獲得更好的提升。
3.7 子計畫四:海洋環境參數與反潛作戰模式結合研究
3.7.1 研究目的:整合基礎與戰術級模型以分析阻柵效能 本研究之主目的乃在於分析海上巡邏區佈署兵力形成阻柵敵潛艦穿越之阻 柵區。所需之數學模型為戰術模型與科學工藝模型之整合與運用;阻柵區之建 立、兵力運用與敵我間之互動等屬於戰術模型,而所需之高可靠參數如偵測機率 則依賴科學工藝基礎模型來提供。而台灣大學水下聲學實驗室所研發「先進聲納 偵測距離預測系統」(Advanced SOnar Range Prediction System, ASORPS)為本研究 的重要基礎模型。3.7.3 研究要點
阻柵戰術的一個重要特點在海域的選擇。潛艦在執行任務對經過路徑與最終 區域是選擇邏輯是不同的,經過的路徑是選擇最不會被發現,也是最快可以抵達 目標區的;而最終的區域是與目標最有可能遭遇(攻擊、監偵)或接觸(支援、裝卸)
的地點。因此,執行反潛阻柵,選擇阻柵的區域通常為情報判斷中潛艦可能通過 的區域,這些區域往往在一個較大的範圍,也就是說,偵測器的偵測距離隨著水 文環境的變化有所不同,如何利用這種變化,取得阻柵設置之優勢是設計者重要 之因素考量。孫子兵法說『道天地將法』,其中的天指的就是環境,作戰時最重 要之決策因素此其一也,是故本研究將以台灣大學水下聲學實驗室所研發「先進 聲納偵測距離預測系統」(Advanced SOnar Range Prediction System, ASORPS)為基 礎所建立水文環境之數據,進一步探討反潛阻柵戰術的效能與潛艦迴避運動對阻 柵的影響。本研究主要探討議題 一、海洋環境對聲標戰術的影響。 二、潛艦在面對聲標戰術佈放主動聲標反應與戰術設計的關係。 三、海洋環境對隨機搜索戰術的影響。 3.7.4 反潛搜索 反潛作戰中高難度的部分不在攻擊階段,而是攻擊前的搜索與辨證 (identification)也是耗時最長的階段。反潛兵力在廣大海域進行長時之搜索,主要 目的就是蒐集所有來自海中的聲音,這些聲音的音源包括水流聲、魚群與海底微 生物聲、來網漁船與商船聲以及刻意低調通過之不明目標聲。船聲又可分為主機 聲、泵浦聲、機器與船體間震動聲、推進器聲等,皆有不同之頻率與強度。海域 這個大自然扮演一個聲音傳遞的媒介角色,這些音源製造出的聲音經過海域媒介 的吸收、折射、反射等揉合到達反潛兵力的偵測器與系統,進行數據解析、比對 與輸出,在判讀何者是目標音響(signal)、何者是噪音(noise)、又何者是假信號(false alarm)。而隨著科技的快速進步,潛艦的噪音減碼已有跳耀式的進步,從艦體外 吸音材質到艦內減震、減音的新穎設計建造,已能有規模的降低噪音的產生與減 少艦體的音響反射。此舉將令搜索方兵力之被動偵測無異是雪上加霜,更難僅以 聽的方式從事搜尋潛艦之任務。從所有音響中分析出不知名目標後,如何辨證出 所要之敵對目標,又是另一個議題。許多國家從二戰至今就早已建立海洋情報之 資料庫,並持續蒐集新數據更新原資料庫,其中重要之一即是存有敵、我及中立 國所有軍艦、商船之音頻特性資料。反潛兵力具備這些資料後,就可以迅速的辨 證目標之屬性,以利接續之戰術決心與行動。 3.7.5 ASORPS 之應用 ASORPS 系統透過複雜的海洋模式建構,結合多項水文、底質資料庫,計算 聲音在水中的傳送損失,進而轉換成艦艇聲納的偵測效能。ASORPS 的最後輸出, 經過換算,可提供之參數有:層次深度(Layer Depth; LD)、潛望鏡深度(Periscope Depth; PD)、最佳潛艦深度(Best Submarine Depth; BSD)、潛望鏡深度距離
(Periscope Depth Range; PDR)、最佳深度距離(Best Depth Rang; BDR)等,可提供 使用者方便應用於各類型反潛作戰。例如計算反潛屏衛時,各屏衛艦的間距,或 進行平行掃描搜索時,搜索艦的間隔可運用 ASORPS 的輸出來決定。ASORPS 的 應用,不以單一現場環境之應用為主,在進行模擬分析時,設定搜索機艦或潛艦 的活動範圍都在一個較大的海域中。海域的範圍愈大,其中的海洋環境變化就愈 大。如果只是設定一些固定的偵測機率值,往往無法準確的表達模擬分析的結 果。ASORPS 可以產生某形聲納在某月、和某個經緯度的偵測機率,因此運用 ASORPS 的輸出,可將台灣週遭海域的偵測預測先行處理,產生大範圍的偵測機 率資料庫,則所有相關機艦的偵測結果配合戰術模擬分析後,則可計算相關戰術
的效能。 本年度以台灣西南海域為範圍,來觀察在整個區域中,在不同位置進行反潛 阻柵所形成的效能。我們設定四個案例以分析不同區域的隨機搜索阻柵效能,最 後再以巨觀方式分析在西南海域進行反潛阻柵作戰可能的兵力運用。 3.7.6 分析與結論 一、在本報告中,顯示主動聲納比被動聲納的阻柵效能佳。 二、在反潛隨機搜索的效能分析中,阻柵需求之兵力,隨季節而有不同。 三、在台灣西南海域至南海一帶,阻柵位置的不同所能產生的戰術效能也不同,本 研究將研究重點從戰術層級提升至戰役層級,並提供許多策略發展之重要建議 。 四、本次研究跳脫以往須兼顧因數據不足之下層輸入端而以參數研究之設計與全程 處理方式改以引用 ASORPS 之數據逕行專注上層分析,除降低極大之不確定性外 亦令分析模型與處理過程更形簡易、結果可信度提升。
3.8 子計畫五:聲納偵測參數可靠度分析
3.8.1 研究目的 台灣周邊海域海洋環境複雜,不論在時間及空間上均時時在變動的,聲納系 統在此多變的海洋中,亦會影響其水下偵測效能,在反潛應用中是以聲納方程式 做為偵測效能評估的依據,其各項參數與海洋環境有密切關係,要瞭解水下偵測 效能之優劣,就必須針對各項水下偵測參數進行分析研究,以掌握其影響偵測效 能之程度。 本年度計畫重點在分析、量化台灣周邊海域海洋環境之不確定性 (uncertainty),並估算其在聲場計算時所產生之影響,以進行聲納效能評估結果之 可靠性分析。 3.8.2 聲納偵測距離的不確定性分析 在本年度的分析中,假設一水面艦於艦艏處裝置一具主動聲納,其聲納深度 為 10 公尺,依據圖 3-18 之計算格點位置,實施全向性拍發,由於各點的水文狀 況及地形剖面均不相同,故進行八方位計算,每一方位之計算均採獨立之地形剖 面,所獲得之偵測距離,以色標顯示其遠近。此外,單一方位上如有兩個以上偵 測距離,則取其平均值作為該點之偵測距離。 依據海科中心海底地形及 GDEM 之水文資料範圍,在空間上的分析範圍為 經度 117 度~125 度,緯度 19 度~25 度,以每 15 分之經緯線格點進行每一格點 八個不同方位的聲納偵測距離計算,進行不同季節的計算。圖 3-18 計算格點(15 分經緯度間隔)示意圖 在淺水海域中,傳遞聲波能量的波導(waveguide)厚度較小,較易受到地形 起伏變動的影響,相對於深水海域其波導厚度較大,地形起伏的影響作用則較 小,故聲波在淺水海域水層中傳遞時,極易受到地形變動影響。所以,針對單一 定點來說,聲納聲波能量向四面八方發送,雖然聲速剖面是一致的,但不同傳遞 方位的地形起伏卻會有差異,使得聲納在不同方位的偵測距離亦有所差異,故在 淺水海域或地形變化複雜海域之聲納偵測距離變動性較大。 冬季 自冬季 1 月份開始如圖 3-19,由於海水表面溫度較低,較容易形成層次深度, 使得聲納偵測效能普遍較佳,隨著季節轉向春季,海水溫度漸漸升高,聲納偵測 距離漸漸縮短,整個區域來說,由台灣西南海域開始變化,這是由於東北季風減 弱,海水溫度較高的南海暖流及黑潮支流開始有機會流入台灣海峽。 春季 到了 3~4 月份春季,台灣東部近海海域之偵測距離已逐漸縮短(顯示藍色 部分)如圖 3-20,這是受到黑潮的影響。黑潮向北流,於東北海域受到東海大陸 盆與琉球島弧影響,使得黑潮沿著沖繩海槽向東北流動,由 3~4 月份的偵測距 離分佈可約略看出。 夏季 隨著季節轉換表面海水溫度升高,於 5~8 月份時已無層次深度作用,台灣 週邊海域除了淺水區域受到海底反彈影響,大部分已被藍色所覆蓋(偵測距離在 5km 以下),聲納的偵測效能不佳,如圖 3-21 所示。在南方的呂宋島弧及東北方 的琉球島弧,受到特殊地形造成聲波反射影響,在特定位置之部分方位,有較佳 的偵測效能。至於在淺水區海域,受到海底反彈的影響,普遍有較佳的偵測效能。 惟在淺海水域,混雜回音(混響)現象亦會影響聲納偵測,惟在本次計算中,暫 未列入。 秋季
到了秋季節,氣溫轉涼,整體偵測效能分佈又逐漸被黃、綠色所覆蓋,表示 聲納有較佳的偵測效能,如圖 3-22。
圖 3-19 台灣週邊冬季主動聲納偵測距離分佈圖
圖 3-21 台灣週邊夏季主動聲納偵測距離分佈圖
3.8.3 偵測距離不確定性分析 偵測距離在前述空間與時間上分析後,接著進行定性及定量的不確定分析。 依據圖 3-23 方式,將台灣週邊海域以 2 度經緯線劃分 15 個統計方格,分別針對 方格內之偵測距離進行不確定性分析。 定性分析 在圖 3-23 中,配合 GDEM 水文資料的網格密度,以 15 分之間隔為格點,進 行每一格點八方位的聲納偵測距離計算,將 2 度經緯線方格內之所有偵測距離, 計算其平均值與標準差,以瞭解偵測距離的不確定變化特性。圖 3-24 為 1 月份之 主動聲納統計結果,由於有層次深度作用,其偵測距離平均多為 9-11 公里,如同 之前的分析,在地形變化較大且水深較淺的區域,例如西岸大陸棚(work9~10、 work14~15)、東北之琉球島弧(work11~work12)等區域其偵測離不確定性亦較 大(標準差多在 2 公里以上),位於東南深水海域(work4)之偵測距離變動性 則較少(標準差在 1 公里以下)。到了春季如圖 3-25 之 4 月份統計資料所顯示, 隨著表面海水溫度升高,層次深度變淺,表面聲音之效應減低,使得偵測距離縮 短,約為 6-9 公里,其變動性幅度亦較冬季時為大,標準差由冬季之 1~2 公里, 增加至 3 公里左右。到了 7 月份之夏季,整體的偵測距離已縮短為 3-7 公里,如 圖 3-26 所示,其標準差亦增加為 3~4 公里左右,其變動幅度幾乎為平均值之一半, 如此一來在聲納的運用上應要特別注意。進入秋季時,如圖 3-27 顯示,由於表面 海水溫度降低,偵測距離逐漸增加為 7-10 公里,標準差亦略為減少。 由上述的分析可知,秋、冬季期間,由於上層海水溫度較低,容易形成層次 深度,使得偵測距離較遠,在春、夏季期間,表層海水溫度升高,不易形成層次 深度,連帶使得偵測距離較短,其不確定性(標準差)亦較秋冬期間為高,聲納 偵測效益不佳。此外,在淺水海域部分,較不容易受海水溫度變化影響,均具有 較遠的偵測距離,惟淺水海域的偵測距離不確定性亦較大。 圖 3-23 偵測距離統計分析網格位置示意圖
圖 3-24 台灣週邊海域 1 月份(冬季)主動聲納統計分析圖
圖 3-26 台灣週邊海域 7 月份(夏季)主動聲納統計分析圖
定量分析 地形的變動是聲納偵測距離不確定性的主要影響因素之一,為瞭解地形對偵 測距離之影響,本節分別計算地形的變動性與聲納偵測距離不確定性,以分析兩 者間之關連性。 首先,仍沿用圖 3-23 之 2 度經緯線方格,在每一方格內以 0.25 度(15 分) 的格點計算海底地形(水深)的變動性(標準差)。在前面的分析中,可知地形 的變動量對於聲納偵測距離的影響程度隨著水層厚度(水深的深淺)的不同而有 所改變,在淺水海域的聲納偵測距離變化,受到地形變化的敏感度要高於深水海 域,也就是說,以相同的海底地形(水深)變化量,其影響聲納偵測距離的程度, 淺水海域要高於深水海域,故在分析地形變動不確定性與偵測距離不確定性之相 關程度時,由於兩者之尺度並不相同,應進行地形變動及偵測距離的正規化,如 下式 方格內的水深平均值 差 方格內水深變動的標準 地形變動性= (3.1) 值 方格內的偵測距離平均 差 方格內偵測距離的標準 偵測距離不確定性= (3.2) 完成正規化的計算後,接著依據(3.3)式進行地形變動性與偵測距離不確定 性值之相關性分析,如圖 3-28,每一小圖表示 1~12 月份的比較結果,每一小圖 的縱座標為正規化的地形變動性與偵測距離不確定性,橫座標為參照圖 3-23 之每 一 2 度見方 work 網格的編號,紅線表示偵測距離的不確定性,藍線表示地形變 動性,圖中左上角數值為兩者間依據(3.3)式計算的相關係數。 (3.3) R : 相關係數 I :表示方格內海底地形的數值 j : 表示方格內的偵測距離數值 C : 表示 Covariance Matrix 由圖 3-28 的分析可知,地形的變動性與聲納偵測距離不確定性在 4~9 月份 有高度的相關性,其相關係數多在 0.7 以上,這是因為春夏期間,海水表面溫度 較高,不易形成層次深度,故在水面拍發的聲波,無表面聲管作用,聲波路徑以 向下折射為主,故此期間之偵測距離以受海床作用之海底地形影響較大,使得海 底地形的變動性與偵測距離有高度相關性。在 10 至隔年 3 月份的秋冬季節期間, 受到東北季風低溫且攪拌作用影響,易形成表面聲管,故偵測距離不確定性不只 受到海底地形的影響,亦與聲速剖面有關,故與地形變動的相關係數多在 0.5 以 下。
圖 3-28 地形變動性(藍線)與聲納偵測距離不確定性(紅線)關係圖 3.8.4 結論 最後,在台灣周邊海域偵測距離的定性不確定分析上,冬季時由於有層次深 度作用,在地形變化較大且水深較淺的西部及東北之琉球島弧海域,其偵測距離 平均多為 9-11 公里,使得的其偵測距離不確定性亦較大(標準差多在 2 公里以 上)。位於東南深水海域之偵測距離變動性則較少(標準差在 1 公里以下)。到 了春季,隨著表面海水溫度升高,層次深度變淺,表面聲管之效應減低,使得偵 測距離縮短為 6-9 公里,其變動性幅度亦較冬季時為大,標準差由冬季之 1~2 公 里,增加至 3 公里左右。到了 7 月份之夏季,由於無層次深度作用,整體的偵測 距離已縮短為 3-7 公里,其標準差亦增加為 3~4 公里左右,其變動幅度幾乎為平 均值之一半,如此一來在聲納的運用上應要特別注意。進入秋季時,由於表面海 水溫度降低,偵測距離逐漸增加為 7-10 公里,標準差亦略為減少。 在分析地形的變動性與聲納偵測距離不確定上,由於地形的變動量對於聲納 偵測距離的影響程度隨著水層厚度(水深的深淺)的不同而有所改變,在淺水海
域的聲納偵測距離變化,受到地形變化的敏感度要高於深水海域,故在分析地形 的變動性與偵測距離不確定性之相關程度時,應進行地形變動的正規化,由圖 3-28 的分析可知,在春、夏季無層次深度作用期間,地形的變動性與聲納偵測距 離不確定性有高度的相關性。