基於等效電路模型之橢圓形超音波馬達的動態分析
何信宗、陳昱凱 國立高雄應用科技大學 機械工程學系 通訊作者電子郵件:E-mail: [email protected]摘 要
本文作者已經在先前的研究中,以實驗量測的方式對橢圓形超音波馬達所具有的運動特性進行過調查 與研究,也得到了很好的輸出特性。為了進一步理解橢圓形超音波馬達內部各組成元件的特性以及互動關 係,本論文打算以理論分析的方式探討橢圓形超音波馬達的動態特性,以檢討出提高馬達運動效能的設計 方法。文中將先介紹馬達之組成結構與動作原理,接著建立馬達各組成部份之數學模型,以定子運動方程 式、接觸層方程式與滑台運動方程式所構成之聯立方程式模擬整組馬達的動態行為。模擬分析的結果最後 與實驗量測的結果做比較,以驗證理論模型之正確性,模擬與實驗結果相當吻合,足以說明本文中理論分 析的可靠性。 關鍵詞:超音波馬達、橢圓形定子、動態分析1. 前 言
自1948 年 William 和 Brown 提出壓電馬達的專利申請開始算起[1],超音波馬達的研究歷史至今已有六 十餘年了。但如果從1982 年 Sashida 首先將行進波型超音波馬達開發成商品化算起,至今則只有約三十年 的歷史[2]。相較於電磁馬達約有兩百年的發展歷史,超音波馬達的研究歷史仍算是很短,尚存在有許多疑 問。超音波馬達的驅動原理與傳統電磁馬達不同,是利用壓電材料的逆壓電效應將電能轉換為機械振動能, 再利用馬達定子與轉子之間的摩擦運動,將機械振動能轉換為馬達轉子的轉動動能。其特點在於能夠產生 低轉速高扭力的輸出特性,而且因為結構簡單、容易小型化,常被應用在需要輕薄短小而且傳統電磁馬達 無法適用的領域,超音波馬達與電磁馬達之間在應用上可以說是呈現互補的狀態。 超音波馬達發展至今已經有許多的型式被開發出來,一般來說一個完整的超音波馬達是由定子與轉子 或滑台所組成,而其中定子的作用是要在其表面構成橢圓形軌跡運動,並用來推動滑台運動。許多不同外 形的壓電結構都可以構成橢圓形軌跡運動,若以定子的外觀形狀來對超音波馬達進行分類的話,現今已有 Nanomotion 公司[3]的長方形超音波馬達,Ohnishi 的 π 型超音波馬達[4]。還有 Fukakubo 等人以兩個積層型 壓電致動器裝設於彈性平板中構成定子[5,6],Zhai 等人以兩個積層型壓電致動器裝設於自由梁中構成定子 [7],Yun 和 Ishii 以蘭杰文振動子與彈性體構成定子[8]。本文作者則於幾年前以橢圓形圓環內嵌入兩個壓電 致動器與一個固定座製作了橢圓形超音波馬達,並以實驗量測方式探討此型馬達的特性[9]。 文獻[9]中已有橢圓形超音波馬達基本特性的詳細說明,實驗數據顯示橢圓形定子結構在幾何形狀上是 一個很理想的形狀,可以產生兩個相同頻率且互相正交的振動模態,因此定子的橢圓形運動軌跡可以透過 電壓大小和相位差的調整而得到期望的橢圓形狀。然而,實驗量測的結果所呈現的是定子或是整個馬達的 運動特徵,對於改善定子或馬達的運動特性而言,我們仍需要對馬達內部的動態關係得到進一步的理解, 才有助於改善馬達特性的設計參考。 因此,本文將著眼在整個橢圓形超音波馬達系統的動態特性分析,以數學分析的方式對馬達各組成部 份建立數學模型,以定子運動方程式、接觸層方程式與滑台運動方程式所構成之聯立方程式模擬整組馬達 ©2007 National Kaohsiung University of Applied Sciences, ISSN 1813-3851的動態行為。模擬分析結果將與實驗量測相結果做比較,以逐一驗證馬達動態系統的數學模型,並求出橢 圓形超音波馬達的動態特性,以進一步深入理解該馬達的特性。
2. 馬達結構與動作原理
2.1 馬達結構 圖 1 所示為本研究製作之超音波馬達的組成結構,整個結構分成定子、滑台、預壓機構、馬達底座與 位移感測器等五部份,其中,定子為馬達的設計核心,如圖 2 所示,該定子結構是將兩個積層型壓電致動 器與一個固定座夾置於一個橢圓形圓環結構內所構成。固定座的主要功能在於限制與固定定子的運動方 向,使整個橢圓形定子的移動方向與滑台的移動方向成直角關係,而壓電致動器的功能在於轉換驅動電壓 成為相對的變形量,當壓電致動器的伸縮變形推動橢圓形圓環結構時,將會轉換成橢圓形圓環的彈性變形 運動。另外,預壓機構的功能在於透過彈簧的推力對橢圓形圓環與滑台的接觸面施與一個正向力,以有效 利用摩擦運動產生推動滑台移動的摩擦力。位移感測器用來感測滑台的移動位置,馬達底座則用來固定各 個組成元件於相對位置上。 位移感測器 滑台 定子 預壓機構 底座 圖1 橢圓形線性超音波馬達的原型機 圖2 橢圓形定子的結構圖(a)法向振動模態 (b)切向振動模態 圖3 橢圓形定子的振動模態 2.2 動作原理 橢圓形超音波馬達屬於双模態超音波馬達,在動態設計上主要是利用橢圓形圓環結構的兩個直角正交 振動模態,如圖 3 所示為橢圓形定子的法向振動模態與切向振動模態,這兩個振動模態的特點在於其自然 頻率相近,而且當振動時會在橢圓形圓環的上側頂端形成直角正交的振動運動,使得切向振動模態進行左 右變形移動,而法向振動模態進行上下變形移動。此超音波馬達的驅動電源主要利用兩個具有90 度相位差 的正弦電壓源作為壓電致動器的驅動電壓源,用以激發定子壓電結構產生切向振動與法向振動的振動模 態,由於這兩個振動運動之間具有90 度相位差的關係,會使得兩個直角正交的振動運動變成進行橢圓形軌 跡的變形運動。若相位差為正 90 度時會形成順時針旋轉的橢圓形變形軌跡的話,則在相位差為負 90 度時 會形成逆時針的橢圓形變形軌跡。如此一來,利用正負90 度相位差的切換即可有效控制超音波馬達的運動 方向。 以能量轉換關係的觀點來看超音波馬達的話,從馬達定子的驅動電壓到滑台的直線運動共經過兩個階 段的能量轉換過程。第一階段能量轉換過程發生在橢圓形定子上,由於壓電材料的逆壓電效應關係,可以 將驅動電壓端的電能轉換為橢圓形定子的二維機械振動能。此階段能量轉換效率的良否一方面受到壓電材 料與金屬彈性體的材料參數影響,另一方面也受到橢圓形定子結構的尺寸設計影響。第二階段能量轉換過 程發生在橢圓形定子與滑台之間的摩擦運動,此階段能量轉換效率的良否除了受到定子與滑台的摩擦係數 影響,也會因摩擦面的法向壓力大小而有所不同;此外,橢圓形定子在接觸點所激發的橢圓形變形軌跡, 其形狀與大小都會影響到摩擦運動所傳遞的能量值與滑台的移動運動特性。
3. 橢圓形超音波馬達的動態模型
超音波馬達是一個機電系統,其主要功能是將電能透過壓電材料轉換為二維運動的機械振動能,再經 過摩擦運動的作用將二維運動的機械振動能轉換為直線運動。為了充份了解整個馬達機電系統的動態行 為,必需先對馬達內部的組成元素逐一建立其數學模型,接著藉由馬達內部各個組成元素之間的數學互動 關係,逐一串聯起來得到整個馬達的系統運動方程式,這個系統方程式也可說是各組成元素的運動方程式 及其之間的互動關係方程式所構成的聯立方程式。超音波馬達的動態系統由橢圓形定子、滑台與其互動關 係的接觸層等三部份所構成,以下各節將就這三個部份逐一探討與推導其運動方程式。 3.1 橢圓形定子的動態模型 如圖 2 所示為橢圓形定子結構圖,圖中上端設置有一個凸起的接觸點,在接觸點處並標有直角座標 x與y,此處之 x 方向即為切向方向,y 方向即為法向方向。基本上,橢圓形定子是一個機電元件,輸入端為 壓電致動器Piezo A 的驅動電壓 vA與Piezo B 的驅動電壓 vB;輸出端為橢圓形定子接觸點的x 方向振動位移 量與y 方向振動位移量。由於輸入端電壓 vA與vB為高頻率的交流電壓且存在相位差β,因此隨著電壓 vA與 vB的大小和相位差β 的不同,由 x 方向與 y 方向的振動量在接觸點所構成的橢圓形變形軌跡會有不同的形 狀與大小,這個定子的等效電路可以依這些輸入端電壓電流與輸出端的位移關係表示如圖 4 所示。圖 4 的 等效電路圖所表示的運動方程式可以下列各式表示。 B bt A at t t t
x
d
x
k
x
A
v
A
v
m
&&
+ &
+
=
−
(1) B bn A an n n ny
d
y
k
y
A
v
A
v
m
&&
+
&
+
=
+
(2) A A a an atx
A
y
C
v
i
A
&
+
&
+
&
=
(3)x
A
i
v
C
y
A
bn&
+
b&
B=
B+
bt&
(4)其中,mt, dt, kt各別為定子切向振動的等效質量、等效阻尼係數與等效彈性係數。mn, dn, kn各別為定子
法向振動的等效質量、等效阻尼係數與等效彈性係數。Aat與Aan各別表示壓電致動器Piezo A 在切向與法向
的力轉換係數,Abn與Abn則各別表示壓電致動器Piezo B 在切向與法向的力轉換係數。另外,Ca與Cb各別
為壓電致動器Piezo A 與 Piezo B 的壓電電容量。iA與iB各別為壓電致動器Piezo A 與 Piezo B 的輸入端電流。
對照Fig.4 中的等效電路來看,(1)(2)式所描述的是等效電路中的克希荷夫電壓定律關係,而(3)(4)式所 描述的是等效電路中的克希荷夫電流定律關係。(1)式所描述的即是定子切向振動的等效質量、阻尼係數與 彈性係數所造成的總電壓降等於驅動電壓 vA與 vB所造成的總電壓升,在這裡由於壓電致動器 Piezo A 與 Piezo B 在輸出力方面呈現反相關係,因此 vA與vB所造成的電壓升為相減關係。(2)式所描述的即是定子法 向振動的等效質量、阻尼係數與彈性係數所造成的總電壓降等於驅動電壓vA與vB所造成的總電壓升,在這 裡由於壓電致動器Piezo A 與 Piezo B 在輸出力方面呈現同相關係,因此 vA與vB所造成的電壓升為相加關 係。(3)式所描述是 Piezo A 電極端的輸入電流量 iA等於切向振動x 所消耗電流量、法向振動 y 所消耗電流 量與通過電容Ca的電流量之總和的關係式。(4)式所描述是 Piezo B 電極端的輸入電流量 iB等於切向振動x 所消耗電流量、法向振動y 所消耗電流量與通過電容 Cb的電流量之總和的關係式。 一般而言,要描述橢圓形定子的機電轉換關係只要使用(1)(2)式的致動方程式即可,但在本文中為了探 討定子電極端的輸入阻抗關係,因此在這裡加入(3)(4)式的電極輸入端的電流關係式,(3)(4)式也可以稱為感 測方程式,關於這些壓電致動器的機電特性的理論推導部份可以參考文獻[10]。 3.2 橢圓形定子的電極輸入阻抗 為了求解輸入阻抗方便,在這裡開始將數學式(1)-(4)以拉式變換式表示之,其中,X 與 Y 各別是位移 x 與y 的拉式變換函數,VA與VB各別是電壓vA與vB的拉式變換函數,IA與IB各別是電流iA與iB的拉式變換 函數。當壓電致動器Piezo B 的電極端為短路時,要推導 Piezo A 電極端的輸入導納可以將(1)式整理出的 X 與(2)式整理出的 Y 代入(3)式後,求得 Piezo A 電極端的導納 YA (=IA/VA),如下。
a t t t at n n n an A sC k s d s m sA k s d s m sA Y + + + + + + = 2 2 2 2 (5) 同樣的,當壓電致動器Piezo A 的電極端為短路時,要求推導 Piezo B 電極端的輸入導納可以將(1)式整 理出的X 與(2)式整理出的 Y 代入(4)式後,求得 Piezo B 電極端的導納 YB (=IB/VB),如下。 b t t t bt n n n bn B sC k s d s m sA k s d s m sA Y + + + + + + = 2 2 2 2 (6) 由於我們在橢圓形定子中所使用的壓電致動器Piezo A 與 Piezo B 為相同的壓電致動器,在定子製作與 組裝良好的情況下,其壓電電容量相同Ca=Cb,且力轉換係數相同Aan=Abn,Aat=Abt。在此情況下,Piezo A 電極端與Piezo B 電極端的輸入導納將會相同,即 YA=YB。另外,橢圓形定子在使用上,若要單純只驅動橢 圓形定子的法向振動而不產生切向振動,可以將Piezo A 電極端與 Piezo B 電極端以同相並聯的方式驅動, 此時施加於Piezo A 與 Piezo B 電極端的電壓相同為 Vn。其電極端電壓與電流的關係為VA=VB=Vn與IA+IB=In。 將這些關係式代入(1)式與(2)式中,再加以整理後可以得到同相並聯電極端的輸入導納 Yn (=In/Vn),如下。
(
a b t t t bt at n n n bn an n ms ds k sC C A A s k s d s m A A s Y + + + + − + + + + = (2 )2 (2 )2)
(7) 同樣的,在定子製作與組裝良好的情況下,其壓電電容量相同Ca=Cb=Cn,且力轉換係數相同Aan=Abn= An,且Aat=Abt=At。在此情況下,其輸入導納Yn可以進一步簡化如下。 n n n n n n sC k s d s m sA Y 24 2 2 + + + = (8) 另外,橢圓形定子在使用上,若要單純只驅動橢圓形定子的切向振動而不產生法向振動,可以將Piezo A 電極端與 Piezo B 電極端以反相並聯的方式驅動,此時施加於 Piezo A 與 Piezo B 電極端的電壓相同為 Vo。但由於將Piezo B 電極端反相連接時,用來驅動切向振動的電流 sAbtX 與用來驅動法向振動的電流 sAbnY,其 流動方向相反,使得(4)式的方程式需要修正。因此,反相並聯的電極端電壓的關係改變為 VA= -VB=Vt,電 流關係則為IA+IB=It,將這些關係式代入(1)式與(2)式後,再加以整理後可以得到反相並聯電極端的輸入導納 Yt (=It/Vt),如下。
(
a b t t t bt at n n n bn an t sC C k s d s m A A s k s d s m A A s Y + + + + + + + + − = (2 )2 (2 )2)
(9) 同樣的,在定子製作與組裝良好的情況下,其壓電電容量相同 Ca=Cb=Ct,且力轉換係數相同 Aan=Abn= An,且Aat=Abt=At。在此情況下,其輸入導納Yt可以進一步簡化如下。 t t t t t t ms ds k sC sA Y 24 2 2 + + + = (10)圖4 橢圓形定子的等效電路模型
圖5 滑台的動態模型
3.3 滑台的動態模型 圖 5 所示為滑台在進行移動運動時,作用在滑台上的作用力表示圖。由於滑台的移動方向為 x 方向, 因此依據牛頓第二定律可以求得滑台的運動方程式,如下式。 f t s s s s
x
d
x
f
f
m
&&
+
&
=
−
(11) 其中,ms為滑台的質量,ds為滑台的阻尼係數,xs為滑台的位移量,ff為滑台的滑軌間所發生的摩擦力, ft則為橢圓形定子所造成的切向力。由於當電壓激發定子產生變形時,若推動滑台的切向力小於摩擦力ff, 則滑台不會被移動;若要使滑台開始產生移動運動,則需要使切向力ft先克服摩擦阻力ff 才行。在馬達控 制運動的行為中,這個切向力ft還無法克服摩擦阻力ff的力量變化範圍,一般被稱為死區(Dead Zone),亦 即是指驅動電壓太小,仍不足以推動超音波馬達移動的這個作用範圍。在馬達無負載時,作用於滑台的線 性滑軌上的摩擦力ff來自於滑台質量ms與法向力fn,可以表示如以下兩式。⎩
⎨
⎧
≥
<
=
m t m m t t ff
f
f
f
f
f
f
,
,
(12))
(
)
(
V
f
m
g
sign
f
m=
−
sμ
s n+
s (13) 其中,μs為滑台的線性滑軌內的摩擦係數而 Vs為滑台的移動速度,g 為重力加速度。由上兩式可知, 超音波馬達移動時的死區現象來自於滑台內滑軌的摩擦力ff,而此摩擦力的大小與法向力fn的大小及滑台質 量ms相關。也就是說,當滑台的質量越大或是負載越大時,需要較大的切向力才能使滑台移動,這時馬達 的死區現象越嚴重。為了改善馬達的性能,讓馬達在高負載下也能減少死區現象的發生,其最佳的改善方 式則是盡量降低滑台內滑軌的摩擦係數μs。 3.4 接觸層的動態模型 在前文中已提過,超音波馬達的能量轉換過程中,除了橢圓形定子是將驅動電能轉成定子的機械振動 能外,在定子與滑台之間的接觸層模型則關係到摩擦運動所造成的能量轉換關係。關於接觸層動態模型的 探討,隨著理論分析的嚴密程度已有點接觸模型、線接接觸模型與面接接觸模型被探討過[11]。雖然使用較 為複雜的動態模型可以有效提高精確度,降低模擬分析時的誤差,但由於在本文中我們所探討的著眼點在 於整個馬達系統的動態行為,因此仍然採用較為簡單的點接觸模型,以減輕求解時在數值計算上的負擔。 圖 6 所示為橢圓形定子與滑台之間發生接觸行為時的接觸層數學模型。當定子與滑台互相接觸時,定子的 變形運動會受到接觸層的外力影響,造成定子變形運動軌跡的改變。因此,定子在與滑台發生接觸行為時, 其振動方程式除了受到驅動電壓的影響外,也受到接觸層的反力作用,以下兩式即為加入接觸層反力作用 後的定子運動方程式。 B bt A at t t t tx
d
x
k
x
f
A
v
A
v
m
&&
+ &
+
+
=
−
(14) B bn A an n n n ny
d
y
k
y
f
A
v
A
v
m
&&
+
&
+
+
=
+
(15) 其中,ft為定子在接觸層的切線方向所受到的反力,fn為定子在接觸層的法線方向所受到的反力。在圖6 中,定子與滑台間的接觸層模型可以在法向用一組並聯的彈簧 kc和阻尼 dc來表示其撓性。另外,Fp為預 壓彈簧施加在定子上的力量,yst為預壓力Fp所造成接觸層的靜態彈性變形量。當施加電壓於橢圓形定子時, 定子產生變形運動並推動滑台,此時接觸層會在法線方向對定子產生反力 fn,使得此反力 fn與定子法向變 形量、接觸層的彈性係數kc、阻尼係數dc與預壓力Fp之間的關係可以下式表示。 0 ) ( , 0 ) ( , 0 ) ( < − + + > − + + ⎩ ⎨ ⎧ + + − = st c c p st c c p st c c p n F d y k y y y y k y d F y y k y d F f & & & (16) 上式中表示,在滑台移動時只可能存在正的法向力,而不可能有負的正向力存在。因此,當彈簧預壓 力Fp施加於定子上所產生的法向力大於零時,才有法向力 fn的作用,進而因為摩擦運動產生切向力ft推動 滑台移動。若是法向力 fn小於零則是代表定子已經脫離滑台,所以沒有法向力的產生,也就不會透過摩擦 現象產生切向力推動滑台移動。切向力ft與法向力fn的關係可以下列兩式表示之。 n k s t t
sign
V
V
f
f
=
(
−
)
μ
(17)⎪
⎩
⎪
⎨
⎧
<
=
>
−
=
0
,
0
,
0
,
1
0
1
)
(
x
x
x
x
sign
(18) 其中,Vt表示定子頂端的切向速度,Vs表示滑台的移動速度,μk則為定子與滑台之間接觸層的動摩擦 係數。上式表示切向力等於動摩擦係數乘上作用於定子的法向力,不過由於定子的變形運動會有正位移與 負位移的發生,因此滑台被定子推動所產生的作用將由下列三種情況來決定。第一種情況是當定子切向速 度大於滑台移動速度時會產生正的切向力而推動滑台前進,第二種情況是當定子切向速度等於滑台速度時 就無切向力產生,最後一種情況是滑台速度大於定子切向速度時會產生負的切向力,造成滑台減速。4. 模擬分析與實驗結果
4.1 自由狀態時的橢圓形定子動態行為 在前面3.1 節中已建立橢圓形定子的動態模型,為了先確定橢圓形定子的振動頻率響應,我們先對壓電 致動器Piezo A 與 Piezo B 施以同相的正弦波電壓,以激發定子法向振動模態的頻率響應。再對壓電致動器 Piezo A 與 Piezo B 施以反相的正弦波電壓,以激發定子切向振動模態的頻率響應。圖 7 所示即為這兩個頻 率響應的量測曲線,圖中所示法向振動模態的共振頻率發生在 22.5 kHz,在此驅動頻率下,每伏特電壓可 驅動定子達到4.82 um 的法向振動位移量。而切向振動模態的共振頻率發生在 20.4 kHz,在此驅動頻率下, 每伏特電壓可驅動定子達到0.63 um 的切向振動位移量。由於橢圓形定子結構的特性關係,導致定子的法向 最大位移量約為切向最大位移量的7.6 倍左右。 依據圖7 的量測數據,我們可以利用 Curve Fitting 的方法計算(1)(2)式所示定子振動方程式的系統參數, 所求得的定子等效質量、等效阻尼係數、等效彈性係數與力係數等參數都列在表 1 中。有了這些定子結構 的參數值即可以定子振動方程式模擬定子的各項動態行為。如圖 7 中所示虛線部份即為這些參數值所模擬 得到的頻率響應。Fig.8 所示為所量測到的法向模態與切向模態的阻抗曲線與對壓電致動器 Piezo A 所量測 得到的阻抗曲線,在量測法向模態的頻率響應時,是將兩個壓電致動器的電極端以同相並聯的方式進行量測。而在量測切向模態的頻率響應時,則是將兩個壓電致動器的電極端以反相並聯的方式進行量測。另外, Fig.9(a)所示為在 20.5 kHz 的驅動頻率下,對壓電致動器 Piezo A 施以 6V 到 11V 變化的驅動電壓時,所量 測到的穩定狀態橢圓形變形軌跡,呈現順時針旋轉的情形。圖9(b))所示在 20.5 kHz 的驅動頻率下,對壓電 致動器Piezo B 施以 6V 到 11V 變化的驅動電壓時,所量測到的穩定狀態橢圓形變形軌跡,呈現逆時針旋轉 的情形。而且此橢圓形軌跡隨著驅動電壓的增加,橢圓形軌跡的尺寸呈現相對增大的趨勢。
圖10(a)所示為在 20.5 kHz 的驅動頻率下,對壓電致動器 Piezo A 與 Piezo B 施以 6V 到 11V 變化的相同 驅動電壓但有 90 度相位差時,所量測到的穩定狀態橢圓形變形軌跡,呈現順時針旋轉的情形。圖 10(b)所 示為在20.5 kHz 的驅動頻率下,對壓電致動器 Piezo A 與 Piezo B 施以 6V 到 11V 變化的相同驅動電壓但有 負90 度相位差時,所量測到的穩定狀態橢圓形變形軌跡,呈現逆時針旋轉的情形。而且此橢圓形軌跡隨著 驅動電壓的增加,橢圓形軌跡的尺寸呈現相對增大的趨勢。 另外,為了理解橢圓形定子的暫態振動行為,我們也根據前文中所建立的定子動態模型與參數,進行 電壓剛開始驅動時的過渡狀態之模擬分析。如圖11 與圖 12 所示為定子結構未接觸滑台的狀態下,以 90 度 相位差双相驅動定子時,模擬分析得到定子的法向位移響應與切向位移響應情形。法向位移的振幅響應方 面呈現二階低阻尼系統的階段響應,而切向位移的振幅響應方面呈現二階過阻尼系統的階段響應情形,其 造成原因可以從表 1 所示的系統參數來看,定子動態系統在法向振動的阻尼係數低於其臨界阻尼係數值, 故在位移的振幅響應方面呈現低阻尼系統的階段響應。而定子動態系統在切向振動的阻尼係數低於其臨界 阻尼係數值,故在位移的振幅響應方面呈現過阻尼系統的階段響應。 表1 橢圓形定子模型的系統參數值
Normal mode Tangential mode Resonance frequency (kHz) 22.5 20.4
Effective mass (g) 2 2.5 Effective damping coefficient (N-s/m) 3.65 10.56
Effective stiffness coefficient (N/m) 3.95×107 4.07×107 Force factor (N/V) 1.1 2.57
表2 滑台與接觸層模型的系統參數值
Static displacement yst (m) 1×10-8 Pre-load force Fp (N) 7.5 Spring constant of the contact layer kc (N/m) 0.49×107 Damping constant of the contact layer dc (N-s/m) 0
Friction coefficient μk 0.32 Mass of the slider ms (kg) 0.11
Damping coefficient of the slider ds (N-s/m) 0.2
圖7 橢圓形定子的頻率響應
圖8 橢圓形定子的輸入阻抗曲線
(a)只驅動 Piezo-A 時 (a)只驅動 Piezo-B 時 圖9 定子接觸點的橢圓形運動軌跡量測曲線
(a) -90° (b) -90°
圖10 定子接觸點的橢圓形運動軌跡量測曲線
圖11 橢圓形定子法向位移的時間響應
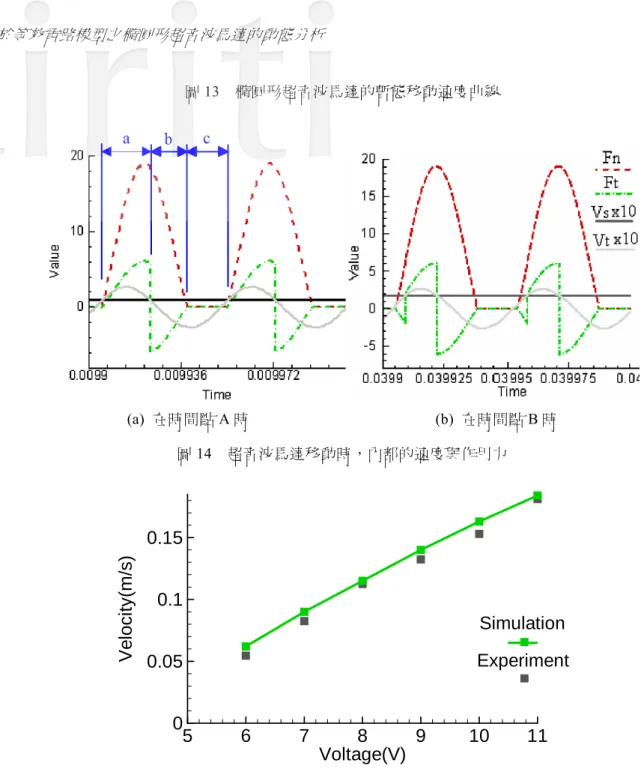
4.2 橢圓形超音波馬達的運動特性 前文的第3 章已經建構整個橢圓形超音波馬達的動態方程式,只要先決定定子驅動電壓 vA與vB及其相 位差β 後,即可透過聯立方程式(1)-(4)與(11)-(18)的求解而得到馬達驅動運動的各項訊息。然而,由於橢圓 形超音波馬達在定子與滑台的摩擦運動方面屬於非線性問題,要直接以數學推導方式求解存在著相當的困 難度。因此,為了簡化問題起見,我們採用Matlab 軟體內的 Simulink 功能對超音波馬達動態系統進行數值 解求解。根據 Simulink 的系統圖形構建方式,依序將方程式(1)-(4)與(11)-(18)構建成超音波馬達 Simulink 模型即可進行數值解的求解,詳細的求解方法說明可以參考文獻[12]。 表2 中所示為我們在超音波馬達的 Simulink 模型中所使用的系統參數值。根據這些系統參數值,我們 可以求出馬達滑台的移動速度響應,如圖13 所示。在驅動電壓為 11V 電壓的双相電壓驅動時,從切下電源 開始驅動超音波馬達到馬達滑台達到穩定的移動速度0.18 m/s 為止約需花費 0.04 秒,模擬結果大致與實驗 量測值互相吻合。另外,在圖13 的馬達速度暫態響應曲線中,在馬達驅動的各個時間點附近,其所對應的 定子法向力、切向力、定子切向速度與滑台移動速度隨著時間的變化情形可以由Simulink 模型中求出,如 圖14(a)(b)所示即為時間點 A 與 B 所對應的力量變化與速度變化圖。 在馬達未達到穩定速度狀態的時間點 A,其所對應的運動狀態變化圖 Fig.14(a)中,在一個周期的定子 變形運動可分為 a、b、c 等三個時間段來看。在 a 時間段,定子的切向速度大於滑台移動速度,此時的定 子切向力大於零推動滑台前進,使得滑台處於加速狀態。在b 時間段,定子的切向速度小於滑台移動速度, 此時的定子切向力變為負值,使得滑台受到反向切向力而呈現減速現象,不過由於滑台前進的慣性力與此 反向推力相比仍然較大的關係,使得滑台的速度仍然呈現正值。在c 時間段,由於法向力轉變為零的關係, 使得定子脫離滑台,切向力也變為零,滑台依原有的慣性前進,一直到下一個周期開始,定子才再重新與 滑台接觸,再度推動滑台加速。 當馬達接近達到穩定速度狀態的時間點B,在所對應的運動狀態變化圖 14(b)中,其一個周期的定子變 形運動a、b、c 三個時間段與圖 14(a)中發生的情況大致一樣,只不過在時間點 B 附近,由於滑台的移動速 度較快的關係,使得定子推動滑台的切向力小於時間點 B 時所發生的切向力。當定子推動滑台的切向力平 均值與反向切向力的平均值相等時,此時的馬達即會達到固定速度的穩定狀態,再也無法提高速度。圖15 所示為不同驅動電壓下的馬達穩態速度曲線,實驗的量測結果與模擬值大致吻合。這個馬達在實際測試時, 當驅動電壓低於6V 時,馬達幾乎不會動作,其造成原因與前文 3.3 節中所提到的死區現象相關,主要是在 小電壓驅動時,橢圓形定子所產生的切向力尚不足以克服摩擦力,導致馬達滑台無法移動。
圖13 橢圓形超音波馬達的暫態移動速度曲線 (a) 在時 A B 時 圖14 超音波馬達移動時,內部的速度與作用力 間點 時 (b) 在時間點
Voltage(V)
Ve
loci
ty
(m/s)
5
6
7
8
9
10
11
0
0.05
0.1
0.15
Simulation
Experiment
圖15 超音波馬達隨著驅動電壓所對應的速度曲線 V 電壓的双相電壓驅動時,本研究中所製作 的橢 型是較簡單 點接觸模型,但由模擬分析顯示,這個簡單點接觸模型並沒有造成太大的模擬誤差。5. 結 論
橢圓形超音波馬達的特點在於可以單相交流電壓驅動,也可以双相電壓驅動。以簡化驅動電路的著眼 點來看,單相交流電壓的驅動方式較受到歡迎,其優點是只要一個驅動電源即可,但缺點是需要較高的交 流電壓才能達到双相電壓驅動時的移動速度。在驅動電壓為 11 圓形馬達可以在0.04 秒內達到穩定的移動速度 18 cm/s。 在本文的馬達動態分析中,主要將馬達系統分成馬達定子的數學模型、定子作用點與滑台相接觸間的 接觸層數學模型和滑台運動的數學模型等三部份,逐步建立馬達系統的整體模型。根據所建立的定子模型, 可在調整輸入電壓與相位差的方式下模擬出相對應的定子運動軌跡。在馬達輸出性能模擬上,可透過所建 立的馬達系統模型分析出不同驅動電壓下,馬達滑台的輸出位移與速度之暫態響應。這些模擬分析結果都 已經過實驗數據的比對,並驗證整個數學模型的正確性。雖然在本文中所採用的接觸層動態模 的ric Motor,” US Patent 2439499, pp.1, 1948.
, and ,” IEEE Transactions on Ultrasonics, Ferroelectrics, and Frequency Control, Vol.50, pp.245-256, 2003.
參考文獻
[1] A.L.W. Williams and W.J. Brown, “Piezoelect [2] T. Sashida, Japanese Patent 58-148682,1982. [3] US Patent 5453653
[4] K. Ohnishi, “A Novel Ultrasonic Linear Actuator,” IEEE 7th International Symposim of Applied Ferroelectrics, pp.206-212, 1992.
[5] Fukakubo, T. Tsubata, T. Taniguchi, Y. and Kumei, K. “Ultrasonic Linear Motor Using Multilayer Piezoelectric Actuators”, Jpn. J. Appl. Phys, Vol.34, pp.2756-2759, 1995.
[6] Fukakubo, T. and Tomikawa, Y. “Characteristics of Multilayer Piezoelectric Actuator made of High Q Material for Application to Ultrasonic Linear Motor”, Jpn. J. Appl. Phys., 41, pp.7144-7148, 2002.
[7] Z. Baonian, L. Siak-Piang, L. Kwok-Hong, D. P. L. Shuxiang, “Modified Ultrasonic Linear Motor,” Sensors and Actuators, A, pp.154-158, 2000.
[8] Yun, C. Lshii, T. Kentaro, K. and Akashi, K. “A High Power Ultrasonic Linear Motor using a Longitudinal and bending Hybrid Bolt-Clamped Langevin Type Transducer,” Jpn. J. Appl. Phys, 40, pp.3773-3776, 2001.
[9] S.T. Ho, “Characteristics of the Linear Ultrasonic Motor using an Elliptical Shape Stator,” Jpn. J. Appl. Phys., Vol.45, pp.6011-6013, 2006.
[10] S.T. Ho, “Modeling of a Disk-type Piezoelectric Transformer,” IEEE Transactions on Ultrasonics, Ferroelectrics Frequency Control, Vol.54, pp.2110-2119, 2007.
[11] J. Wallaschek, “Contact Mechanics of Piezoelectric Ultrasonic Motors,” Smart Mater. Struct., 7, pp.369-381, 1998. M.S. Tsai, C.H. Lee, and S.H. Hwang, “Dynamic Modeling and Analysis of a Bimodal Ultrasonic Motor [12]