行政院國家科學委員會專題研究計畫 成果報告
子計畫三:由空載光達點雲數據擷取線形特徵研究(I)
計畫類別: 整合型計畫 計畫編號: NSC94-2211-E-009-037- 執行期間: 94 年 08 月 01 日至 95 年 07 月 31 日 執行單位: 國立交通大學土木工程學系(所) 計畫主持人: 史天元 計畫參與人員: 吳紹禎、陳承昌、何心瑜 報告類型: 精簡報告 報告附件: 出席國際會議研究心得報告及發表論文 處理方式: 本計畫可公開查詢中 華 民 國 95 年 10 月 20 日
行政院國家科學委員會專題研究計畫成果報告
由空載光達點雲數據擷取線形特徵研究
計畫編號:94-2211-E-009-037-
執行期限:94 年 8 月 1 日至 95 年 7 月 31 日
主持人:史天元 國立交通大學土木工程學系
計畫參與人員:吳紹禎
、陳承昌、何心瑜一、中文摘要 本研究使用2002 年及 2005 年二時期之空載光達原始掃描資料,進行不同 時期高程及平面成果比對與探討。本年度研究包含兩個主題,不同時期相互之間 高程偏移量內部精度之比對與探討,及一套自訂處理流程進行建物點雲分類及邊 緣萃取。高程值內部精度比對成果顯示,不論使用何種平差方式,整體內部精度 皆能有所提昇。另外萃取完成的建物點雲及邊緣線形資料分別與 1/1000 線繪圖 以視覺疊合方式及誤差距離量測統計方式評估其平面方向偏移情形。統計成果顯 示 , 本 方 法 評 估 之 空 載 光 達 成 果 整 體 E 向 及 N 向 的 平 面 偏 移 量 介 於 0.211m~0.795m 之間,該量級約為三倍高程誤差,與儀器規格相當。 本研究以二不同房屋型態之實驗區域進行測試評估,實驗區Ⅰ為高層建物 區域,實驗區Ⅱ則為平房區域。由實驗區Ⅰ、Ⅱ中挑選比對之各建物邊緣萃取成 果的誤差距離量測統計顯示,2002LiDAR 平面萃取成果之 N 向較 E 向為佳,其 建物邊緣的萃取成果有東向的偏移;2005LiDAR 平面萃取成果之 E 向則較 N 向 為佳,但實驗區Ⅱ統計成果的偏移量小於實驗區Ⅰ,而實驗區Ⅰ之建物邊緣的萃 取成果則有北向的偏移。二時期評估成果顯示,垂直於航向方向之平面精度優於 平行航向方向之平面精度。 關鍵字:邊緣萃取、內部精度、平面精度比對 Abstract
This study evaluates the planimetric and vertical accuracy of the point clouds collected by two airborne lidar missions in 2002 and 2005 respectively. It is shown that the strip-wise adjustment is helpful for reducing the internal inconsistency. The building boundaries are extracted from the point clouds and compared to a 1:1000 vector map. Hough transform is applied to find corner points for buildings. The
errors are then assessed, utilizing both visual and statistical approaches. Experimental results indicate that mean errors were between 0.211m-0.795m in planimetric offsets. The results also show that planimetric offsets in the scanning direction are smaller than those in the flight direction.
Keywords: Edge extraction, internal accuracy, planimetric accuracy evaluation 二、前言 空載光達掃描成果之精度評估分為高程精度及平面精度兩部分。高程部分 的評估經常是利用航帶平差及連結點匹配的模式進行。目前空載光達掃描數據重 疊區誤差的評定方法,包括Crombaghs 等 (2000)、童俊雄等(2005)應用三參數航 帶平差模式,主要利用航帶間共軛點之點位高程求解航帶變形參數,進而計算航 帶在高程方向的系統性變化。Behan (2000)將原始點雲資料經由內插方式產生 2.5D 的規則網格結構進行共軛點匹配。Morin 與 El-Sheimy (2001)利用建物或道 路等特徵,以大量的點雲觀測數將特徵參數化,作為連結區進行匹配。Latypov (2002)計算航帶重疊區內各小面積區域之高程平均值與標準偏差,透過標準偏差 篩選平坦的航帶重疊區域,計算高程平均值差異量,以評估系統性誤差。Maas (2000)、Vosselman and Maas (2001)、Maas (2002)則以不規則三角網結構、應用最 小二乘法匹配共軛點,評估航帶重疊區高程及平面方向的誤差。 平面精度的部分,一般則是透過平面特徵物之線形萃取而進行比對評估。文 獻中平面資訊萃取的方法如:Elberink 與 Mass(2000)利用光達原始資料之紋理 (Texture)特徵,藉由表面之紋理特性來區分樹木以及房屋之區域;Vögtle 與 Steinle(2000)以資料融合之角度,結合光達資料與多光譜影像,運用光譜資訊中 近紅外波段對於樹木區堿判別容易之特性,將樹木從光達資料中濾除,以萃取房 屋區塊;Alharthy 與 Bethel(2002)運用光達系統可記錄多重回訊之特性以及雷射 光對於樹木之半穿透半反射特性,區分出資料中屬於人工建物之部分,並運用網 格化後的光達資料,透過直方圖統計方法統計建物區影像像元,並假設建物為二 維方向正交性的物件以及具有屋緣附近高度變化明顯的特性將房屋邊界偵測 出,利用直線線段描繪出屋緣;Rottensteiner 與 Briese(2002)以網格化後的光達資 料計算DTM 與 DSM 之間的高差,並透過高度門檻值萃取建物區塊,針對樹木 等非建物區域則以 DSM 計算地形粗糙度進行紋理分析的分類方式濾除;Clode 等(2004, 2005)以網格化後的光達資料計算 DTM 與原始點雲資料之間的高差,透 過高差門檻值萃取可能屬於道路之點雲,並使用光達點雲之強度(Intensity)範圍 門檻值萃取道路區域之點雲。 除上述提出的多種方法之外,許多學者亦由實際的案例進行空載光達成果之 高程及平面方向的偏移量評估,如:Mass(2001)應用最小二乘共軛點匹配法於不 規則三角網結構,並以空載光達成果點雲中的高程資訊及強度資訊作為輸入觀測 量,分別計算高程及平面方向的偏移量。成果顯示高程偏移量約10~15 ㎝量級,
其平均標準偏差小於1 ㎝,而平面精度之偏移量約高於 40 ㎝,其平均標準偏差 約為10 ㎝量級;Ahokas 等(2004)選擇一固定航帶區域,以 400 公尺航高來回往 返掃描5 個重疊航帶,各航帶皆透過一橫切航帶進行高程改正。研究中將光達量 測成果與全測站量測之地面檢核點進行高程比對,成果顯示高程偏移量為-2~1 ㎝,標準偏差為±3~4 ㎝,平面精度評估則透過 TerraScan (Terrasolid, 2004)萃取建 物模型,以該區之建物向量圖配合 RTK 量測得到的建物角點,求得比對建物中 心點座標之平面偏移量,成果顯示其平均偏移量小於30 ㎝,以第一反射值之成 果點雲比對的標準偏差為±11~28 ㎝,最後反射值成果點雲比對的標準偏差為 ±14~18 ㎝,綜合第一反射值與最後反射值之成果點雲比對的標準偏差則為±9~16 ㎝;Alharthy 等(2004)以航高 600 公尺掃描的南北向航帶進行其高程及平面偏移 量的分析,該研究中選擇一區平坦的運動場地(足球場、網球場)與周圍的排水溝 進行地面點實測,平坦區域的地面量測點主要提供高程精度評估之用,而排水溝 等地形變化明顯的特徵區域之量測點則提供平面精度評估用。高程評估部分,以 檢核點 1 公尺環域(Buffer)範圍內的雷射點進行比對,成果顯示高程偏移量為 8±20 ㎝。平面精度評估部分則選擇數條分布於排水溝上的雷射點和地面量測 點,分別以最小二乘法進行曲線擬合。將雷射點所擬合的曲線扣除掉高程上的偏 差後,以兩曲線之平移量平方和為最小之成本函數(Cost Function),計算出最佳 匹配時的平移量即為其偏移量,成果顯示東西向的平均偏移量為30 ㎝,南北向 為 47.5 ㎝。另外,其成果中亦顯示,航帶兩側邊緣之平面偏移量較航帶中間為 大。 保守估計,高程定位誤差常達20 ㎝,而平面誤差則多大於 50 ㎝(Huising 與 Pereira, 1998;王與曾,2003);一般而言,空載光達平面精度大約為三倍高程中 誤差之量級。本研究目的在定訂一套流程,進行不同時期空載光達成果數據之平 面特徵物線形萃取,並以1/1000 線繪圖作為地真資料,評估其平面偏移量。 三、使用空載光達數據介紹 3-1 空載光達地面點成果 2002 年點雲數據為農委會在新竹地區以Leica ALS40 系統掃描獲取,航高 約800m,共完成 19 個東西向的航帶資料,涵蓋面積約 58km2(11.7km×5km)。其 中編號1~9 的航帶為 4 月 14 日所獲取,10~19 的航帶則為 4 月 16 日掃描獲得, 範圍如圖1所示。各航帶帶寬平均約680m,雷射點密度 0.71pts/m2,因此,相對 之平均點距約 1.19m。航帶重疊帶寬平均約 433m,重疊百分比為 63.7%,包含 重疊區點雲之整體密度為1.745 pts/m2,相對之平均點距約0.76m。
圖1 2002 年新竹地區光達點雲數據涵蓋範圍 對於2002 年之光達點雲數據,史與彭(2003)使用「航帶配對測點之高程比 較法」的統計分析結果指出,2002 年新竹地區空載雷射掃瞄數據中航帶 9 與 10 之間的高程偏移量約1.683m。另外,史與劉(2004)使用 2004 年於新竹地區規劃 量測的地面檢核點進行比對檢核,計算結果得到,第1~9 航帶之橢球高平均誤差 0.156m,均方根誤差 0.317m,標準偏差 0.277m;第 10~19 航帶之橢球高平均誤 差為1.685m,均方根誤差 1.762m,標準偏差 0.518m,結果顯示 2002 年之光達 點雲數據有明顯之系統誤差,圖 2 為剖面檢視2002 年光達點雲資料航帶 9、10 交界處之高程偏移情形。 圖2 2002 年光達點雲資料航帶 9、10 交界處之高程偏移情形 零級光達點雲之座標因為以直接大地對位(direct georeferencing)所產生,所 以基本上是WGS84 地心座標系統(WGS84 geocentric coordinate system),點之位 置(x, y, z)是以(經度,緯度,橢球高)定義。一般若已經過臻密之先期處理的光達 點雲,零級數據之roll、pitch、heading、dz 與 torsion 等之誤差已藉由系統 IMU、
飛機上之 GPS、以及地面測區內同步測錄之 GPS 等加以改正。因此,零級光達 點雲之座標應與局部測區之橢球高座標一致。唯新竹光達數據顯示第1~9 航帶橢 球高平均誤差0.156 m,第 10~19 航帶橢球高平均誤差 1.685 m。有可能歸因於零 級處理之失誤,若要重新處理點雲,則需要有時間戳紀(time stamps),同時需要 有當初解算之航行軌跡(trajectory)等(史與劉,2004)。 史與劉(2004)直接利用橫切航帶之地面實測橢球高座標模型,與光達高程模 型,兩者直接套合改正。改正後計算結果得到,第 1~9 航帶之橢球高平均誤差 0.000m,均方根誤差 0.006m,標準偏差 0.006m;第 10~19 航帶之橢球高平均誤 差-0.001m,均方根誤差 0.052m,標準偏差 0.052m。圖3顯示經高程平差後,航 帶9、10 交界處之高程間的落差已經消除。
圖3 經高程平差後 2002 年光達點雲航帶 9、10 交界處之高程落差已經消除 2005 年之光達點雲數據為工研院執行內政部委辦計劃之部分成果,由Leica ALS50 系統於新竹地區掃描獲取 24 個南北向航帶(ty021~ty044),表 1為各航帶 飛航掃描參數,涵蓋範圍如圖 4 所示。各航帶帶寬平均約 1100m,雷射點密度 0.867pts/m2,因此,相對之平均點距約 1.07m。航帶重疊帶寬平均約 450m,重 疊百分比為 40.9%,包含重疊區點雲之整體密度為 1.503 pts/m2,相對之平均點 距約0.82m。 表1 2005 年光達點雲數據飛航掃描參數 航線編號 航高(m) 航速(節) FOV 掃描速度 掃描頻率 掃描日期 ty021~ty029 1485 127 43 24 59500 2005.06.06A ty030~ty031 1480 130 43 24 59500 2005.06.05P ty032~ty038 1500 129 43 24 59500 2005.06.02A ty039~ty044 1477 125 43 24 59500 2005.06.05A 圖4 2005 年新竹地區光達點雲數據涵蓋範圍 四、第一部分:高程偏移量內部精度之比對 本研究目的在於暸解空載光達原始掃描數據與經過平差改正後的數據之內
部精度變化情形。本研究採用之數據成果平差改正的方式為使用 TerraMatch (Terrasolid, 2004)進行無地面控制點的航帶平差。
TerraMatch 採用的演算法為 Burman (2002)提出,主要的未知參數有三個方 向的平移量(dX, dY, dZ)與飄移量(driftx, drifty, driftz),三個軸角的偏移 量(dr, dp, dh)與飄移量(driftr, driftp, drifth),透過重疊區之分類地面點 及地面檢核點組成觀測矩陣,以最小二乘法進行求解計算。 4-1 使用其它數據 4-1-1 地面檢核點 2004 年新竹地區地面檢核點為新竹地區於民國 93 年 9 月 21 日、9 月 24 日 及10 月 4 日進行 RTK 量測而得,共測得 273 點。所有量測地面檢核點依量測日 期及參考主站點號的不同,顯示如圖5。圖中各顏色之對照如圖例所示,背景影 像是以2005 年光達點雲的強度影像進行展示,而檢核點的分布範圍則涵蓋 2002 年光達點雲成果19 個航帶的區域。 2004 年地面檢核點的量測成果並未依土地覆蓋分成 5 大類,因此使用地面 檢核點與分類地面點進行高程比對時,需剔除不適合比對的地面檢核點以減少比 對上的影響,例如:在屋頂上或橋上邊緣進行實測,但地面分類點的點雲分布在 河床、河邊(或地表面上),如圖6。 ●:非地面點 ●:地面點 ■■:檢核點 橋 屋頂 圖6 位於橋上或屋頂上的檢核點 圖7 2005 年新竹地區地面檢核點分布情形
2005 年新竹地區地面檢核點共分為三個時期量測而得,分別為 8 月份桃竹 苗地區、10 月份工研院中興院區及 11 月份於新竹地區東西向快速道路所量測之 地面檢核點成果。8 月份及 10 月份的量測成果依土地覆蓋分 5 種類別(1.裸露地、 2.矮植被、3.疏遮蔽樹林、4.森林密遮蔽區域、5.都會區),每種地形至少測量 40 個點,本研究只取裸露地類別之地面檢核點進行比對。 8 月份於桃竹苗一共量測 4 個地區(編號:B,C,D,L),本研究區域之光達點雲 只包含C、D、L 三區,共 120 個裸露地類別的地面檢核點。10 月份工研院中興 院區量測成果共270 個地面檢核點,屬於裸露地類別的地面檢核點共 62 點。11 月份東西向快速道路上之量測成果則有 27 個地面檢核點。因此 2005 年總共有 209 個地面檢核點可供比對使用,各期地面檢核點分布狀況如圖7所示。上列各 時期數據比對時的表示代碼整理如表2。 表2 各時期數據比對代碼 數據資料描述 表示代碼 2002 年農委會原始光達數據經自動分類後的地面點 2002LiDAR 2005 年工研院原始光達數據經自動分類後的地面點 2005LiDAR 2002LiDAR 經 2004GCPs 改正後的點雲 c2002LiDAR
2005LiDAR 經 TerraMatch 航帶平差改正後的點雲 c2005LiDAR
2004 年量測之地面檢核點 2004GCPs 依量測日期及參考主站點號 2004GCPs_0921_6018 2004GCPs_0921_6022 2004GCPs_0924_6018 2004GCPs_1004_1039 2005 年量測之地面檢核點 2005GCPs 依量測月份 2005GCPs_08 2005GCPs_10 2005GCPs_11 4-2 內部精度分析 內部精度分析主要在於探討平差前後之航帶重疊區點雲高程資料的吻合程 度(Internal Consisitency),本單元以 2002LiDAR、c2002LiDAR、2005LiDAR、 c2005LiDAR 各時期各航帶重疊區之資料進行比對分析。各時期資料皆分別經由 地面點自動分類後,針對所有地面點比較高程平均偏移量(Dz)及平均絕對誤差 (Magnitude)。使用 TerraMatch 進行比對計算時,需於各航帶重疊區選取比對區 域,進行比對樣區選取時,應盡量以地勢平坦及分類地面點較多的區域作為選取 標準。各時期依垂直航帶方向的前(1)、中(2)、後(3)三區分別取樣,因此每一組 重疊航帶會得到3 個區域的內部精度計算成果,各時期取樣範圍如圖8、圖9所 示。各重疊區所選取的範圍大小依重疊區帶寬不同而調整,平均選取面積約300m ×300m,如圖10。
重疊區選取範圍 3 1 2 圖8 2002LiDAR、c2002LiDAR 前(1)、中(2)、後(3)分區範圍 重疊區選取範圍 1 2 3 圖9 2005LiDAR、c2005LiDAR 前(1)、中(2)、後(3)分區範圍 300m×300m 圖10 內部精度評定航帶重疊區選取範圍示意 二時期各區比對成果如表3、表4所示,由於進行數據掃描時航高皆在1500 公尺以下,高程精度應可達15 公分(劉進金,2005;Leica, 2003),於表中將平差 前後的內部精度依此評斷標準以顏色區分;紅色表誤差量過大,藍色表符合精度 範圍。由表 3 看出,2002 年航帶數據以地面檢核點進行高程平差後,整體上只
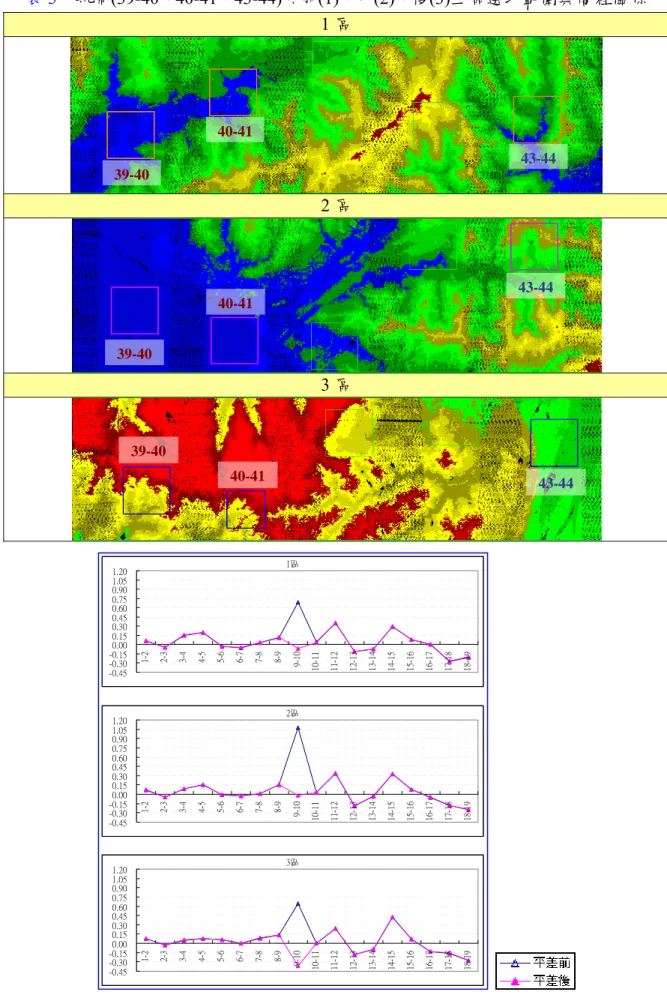
有航帶(9-10)的內部精度有改善,其餘航帶的內部精度則無明顯改善。航帶 (11-12、14-15、17-18、18-19)平差前後的內部精度誤差量則皆保持過大的情形。 由表4看出,經TerraMatch 進行航帶平差的 2005 年航帶數據則是每個航帶 間都明顯的被調整,整體上的調整皆使內部精度達到改善,除了航帶(33-34)的內 部精度在經過航帶平差後是變差的。航帶(26-27、29-30、38-39)在平差前為誤差 量明顯過大的區域,經航帶平差後,整體的內部較差均小於 25cm。另外,航帶 (39-40、40-41、43-44)在第 3 區與第 1、2 區的比對成果不一致,經檢視各航帶 重疊區於該 3 區所選取的比對範圍與高程圖的關係,如表 5 所示,可看出航帶 (39-40、40-41)在第 1、2 區為較平坦的地形,而第 3 區則為山區地形,因此該比 對成果可能因為山區地形影響地面點分類而造成比對成果誤差量較大。航帶 (43-44)在第 1、2 區則為變化較大的山區地形,而第 3 區為平坦地形,因此第 3 區之比對成果之可信度應較高。將表 3、表 4 之成果繪製成圖 11、圖 12,可看 出各時期前(1)、中(2)、後(3)三區個別的內部精度計算成果皆相似。 表3 2002LiDAR、c2002LiDAR 內部精度分析(單位:m) 1 區 2 區 3 區 平差前 平差後 平差前 平差後 平差前 平差後 重疊 航帶
Mag. Dz Mag. Dz Mag. Dz Mag. Dz Mag. Dz Mag. Dz
1-2 0.080 0.061 0.077 0.064 0.080 0.071 0.078 0.073 0.076 0.074 0.072 0.076 2-3 0.079 -0.040 0.075 -0.043 0.089 -0.046 0.084 -0.044 0.071 -0.029 0.067 -0.028 3-4 0.105 0.152 0.104 0.155 0.102 0.086 0.094 0.086 0.078 0.053 0.073 0.057 4-5 0.124 0.198 0.121 0.197 0.115 0.159 0.110 0.157 0.071 0.079 0.069 0.079 5-6 0.096 -0.024 0.088 -0.035 0.079 -0.006 0.076 -0.005 0.070 0.062 0.067 0.063 6-7 0.103 -0.051 0.096 -0.047 0.069 -0.028 0.066 -0.026 0.065 0.000 0.062 -0.003 7-8 0.100 0.037 0.098 0.031 0.059 0.015 0.056 0.012 0.079 0.088 0.076 0.080 8-9 0.092 0.114 0.093 0.123 0.095 0.157 0.092 0.156 0.099 0.135 0.096 0.135 9-10 0.469 0.691 0.078 -0.061 0.551 1.071 0.093 -0.020 0.441 0.639 0.209 -0.362 10-11 0.075 0.039 0.071 0.037 0.082 0.031 0.077 0.027 0.078 0.002 0.075 0.003 11-12 0.197 0.355 0.195 0.351 0.186 0.336 0.182 0.336 0.161 0.237 0.157 0.238 12-13 0.098 -0.114 0.093 -0.113 0.135 -0.188 0.132 -0.182 0.150 -0.186 0.144 -0.179 13-14 0.077 -0.075 0.077 -0.075 0.116 -0.030 0.113 -0.036 0.124 -0.095 0.118 -0.095 14-15 0.162 0.294 0.158 0.290 0.181 0.328 0.178 0.327 0.229 0.426 0.227 0.425 15-16 0.108 0.080 0.103 0.079 0.106 0.077 0.102 0.077 0.105 0.065 0.101 0.066 16-17 0.130 -0.001 0.129 -0.001 0.088 -0.051 0.085 -0.054 0.155 -0.129 0.151 -0.138 17-18 0.196 -0.278 0.194 -0.270 0.135 -0.186 0.131 -0.183 0.128 -0.162 0.127 -0.154 18-19 0.145 -0.206 0.145 -0.200 0.156 -0.247 0.157 -0.251 0.177 -0.281 0.175 -0.277
表4 2005LiDAR、c2005LiDAR 內部精度分析(單位:m)
1 區 2 區 3 區
平差前 平差後 平差前 平差後 平差前 平差後
重疊 航帶
Mag. Dz Mag. Dz Mag. Dz Mag. Dz Mag. Dz Mag. Dz
21-22 0.066 0.028 0.066 -0.052 0.123 -0.043 0.132 -0.133 0.192 0.256 0.173 0.176 22-23 0.059 -0.003 0.071 -0.081 0.101 0.077 0.094 -0.012 0.173 0.147 0.164 0.072 23-24 0.076 0.071 0.068 0.044 0.098 0.046 0.096 0.028 0.117 0.043 0.115 0.025 24-25 0.089 0.105 0.083 0.056 0.183 0.186 0.179 0.169 0.193 -0.071 0.191 -0.103 25-26 0.079 0.059 0.067 0.023 0.104 -0.086 0.110 -0.128 0.139 0.129 0.132 0.096 26-27 0.172 0.319 0.094 0.121 0.172 0.332 0.086 0.128 0.251 0.245 0.209 0.079 27-28 0.095 0.157 0.067 0.003 0.084 0.108 0.070 -0.049 0.160 0.079 0.163 -0.073 28-29 0.077 0.073 0.074 0.031 0.079 0.081 0.072 0.036 0.212 0.232 0.212 0.220 29-30 0.220 -0.392 0.131 -0.132 0.198 -0.306 0.134 -0.056 0.255 -0.402 0.184 -0.165 30-31 0.163 0.228 0.137 0.110 0.128 0.149 0.111 0.020 0.209 0.149 0.199 0.039 31-32 0.162 0.088 0.173 -0.111 0.103 0.016 0.124 -0.174 0.248 0.013 0.253 -0.135 32-33 0.175 -0.151 0.162 -0.038 0.142 -0.196 0.108 -0.100 0.171 -0.236 0.129 -0.089 33-34 0.137 -0.003 0.193 0.328 0.149 0.180 0.248 0.451 0.156 -0.079 0.193 0.227 34-35 0.151 0.109 0.131 -0.030 0.101 0.086 0.098 -0.072 0.152 0.209 0.126 0.049 35-36 0.170 0.051 0.176 -0.058 0.126 0.020 0.133 -0.118 0.199 0.154 0.180 0.024 36-37 0.149 0.091 0.144 -0.051 0.146 0.112 0.134 0.012 0.154 0.105 0.141 -0.018 37-38 0.246 0.311 0.238 0.279 0.125 0.153 0.112 0.101 0.163 0.130 0.159 0.117 38-39 0.303 0.481 0.171 0.053 0.278 0.533 0.102 0.023 0.355 0.674 0.170 0.222 39-40 0.138 0.066 0.133 -0.007 0.086 0.079 0.081 -0.006 0.236 0.237 0.227 0.169 40-41 0.119 0.101 0.111 -0.002 0.096 0.069 0.082 -0.040 0.248 0.202 0.238 0.104 41-42 0.164 0.021 0.159 -0.043 0.149 0.093 0.147 0.038 0.175 0.110 0.171 0.063 42-43 0.239 -0.109 0.239 -0.097 0.133 0.059 0.130 0.051 0.152 0.077 0.151 0.076 43-44 0.181 0.214 0.160 0.024 0.198 0.227 0.173 0.050 0.125 0.048 0.135 -0.129
表5 航帶(39-40、40-41、43-44)於前(1)、中(2)、後(3)三區選取範圍與高程關係 1 區 2 區 3 區 40-41 43-44 39-40 43-44 40-41 39-40 39-40 40-41 43-44 -0.45 -0.30 -0.15 0.00 0.15 0.30 0.45 0.60 0.75 0.90 1.05 1.20 1-2 2-3 3-4 4-5 5-6 6-7 7-8 8-9 9-10 10 -1 1 11 -1 2 12 -1 3 13 -1 4 14 -1 5 15 -1 6 16 -1 7 17 -1 8 18 -1 9 1區 -0.45 -0.30 -0.150.00 0.15 0.30 0.45 0.60 0.75 0.90 1.05 1.20 1-2 2-3 3-4 4-5 5-6 6-7 7-8 8-9 9-10 10-11 11-12 12-13 13-14 14-15 15-16 16-17 17-18 18-19 2區 -0.45 -0.30 -0.15 0.00 0.15 0.30 0.45 0.60 0.75 0.90 1.05 1.20 1-2 2-3 3-4 4-5 5-6 6-7 7-8 8-9 9-10 10-11 11-12 12-13 13-14 14-15 15-16 16-17 17-18 18-19 3區 圖11 2002 年內部精度分析成果
-0.60 -0.45 -0.30 -0.15 0.00 0.15 0.30 0.45 0.60 0.75 21 -2 2 23 -2 4 25 -2 6 27 -2 8 29 -3 0 31 -3 2 33 -3 4 35 -3 6 37 -3 8 39 -4 0 41 -4 2 43 -4 4 1區 -0.60 -0.45 -0.30 -0.150.00 0.15 0.30 0.45 0.60 0.75 21 -2 2 23 -2 4 25 -2 6 27 -2 8 29 -3 0 31 -3 2 33 -3 4 35 -3 6 37 -3 8 39 -4 0 41 -4 2 43 -4 4 2區 -0.60 -0.45 -0.30 -0.15 0.00 0.15 0.30 0.45 0.60 0.75 21 -2 2 23 -2 4 25 -2 6 27 -2 8 29 -3 0 31 -3 2 33 -3 4 35 -3 6 37 -3 8 39 -4 0 41 -4 2 43 -4 4 3區 圖12 2005 年內部精度分析成果 五、第二部分:自訂處理流程進行建物點雲分類及邊緣萃取 5-1 研究方法與流程
本研究參考Ahokas 等(2004)透過 TerraScan 之 By height from ground 工具, 以光達點雲高度資訊進行建物點雲分類。研究中以二個實驗區進行實作與評估, 實驗區Ⅰ為國家科學委員會共同樣區,其區域位於新竹工研院中興院區,房屋型 態多為高層建物,針對該區進行建物點雲分類時所使用之高度門檻值為 12m 及 18m。實驗區Ⅱ為璞玉發展計畫區域中選擇的平房區域實驗區,針對該區進行建 物點雲分類時所使用之高度門檻值為 4m。完成建物點雲分類後,透過影像處理 技術找尋建物邊緣及角點,由萃取成果疊合 1/1000 線繪圖進行視覺疊合分析及 誤 差 距 離 量 測 統 計 分 析 。 使 用 的 光 達 數 據 為 二 時 期 原 始 掃 描 數 據 成 果 (2002LiDAR、2005LiDAR),萃取比對流程如圖13,該程序主要分為「建物點雲 分類」、「視覺疊合分析」、「光達數據網格化」、「建物邊緣萃取及角點偵測」、「誤 差距離量測統計」等步驟。
圖13 光達建物邊緣萃取比對流程圖 5-2 其他使用數據 5-2-1 1/1000 線繪圖 研究中選擇二個實驗區進行平面線形特徵萃取及評估,實驗區 1 為國家科 學委員會共同樣區,該區域位於新竹工研院中興院區,其房屋型態多為高層建 物。該區地真資料為中華顧問工程司於 2002 年 10 月產製的新竹科學工業園區 1/1000 航空測量地形圖,共 9 幅(BK12, BK13, BK14, BL12, BL13, BL14, BM12, BM13, BM14)。圖 14 為該區域高程灰階影像及建物線繪圖,範圍為 1500m× 1000m。 圖14 實驗區 1 之高程灰階影像及線繪圖 實驗區 2 為璞玉發展計畫區域中選擇一平房區域之實驗區,其地真資料為 亞新國土科技股份有限公司於民國2001 年 7 月產製的 1/1000 璞玉發展計畫數值 航測地形圖,共4 幅(1970, 1971, 2070, 2071)。圖15為該區域高程灰階影像及建
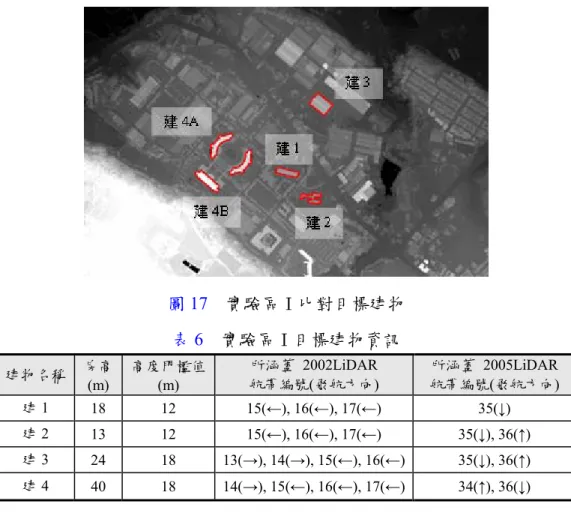
物線繪圖,範圍為800m×700m。 圖15 實驗區 2 之高程灰階影像及線繪圖 5-3 成果探討 5-3-1 邊緣偵測錯誤區域 本研究流程方法於「光達數據網格化」步驟中,在使用Closing 形態學濾波 器將離散點雲進行閉合處理時,其邊緣萃取結果受建物點雲分類成果影響,而造 成線形萃取成果並非實際光達建物點雲所應呈現之建物邊緣。這些區域如圖 16.a,建物邊緣有離散點;圖16.b,建物點雲過於稀疏;圖16.c,建物轉折處等 地方。 圖16 各建物邊緣萃取成果受 Closing 處理影響處 整體上,大部分的影響處皆發生於建物轉折處,若不理會這些影響而直接 對偵測出的邊緣進行成果評估,將導致最後的評估成果中包含了非實際光達點雲 所萃取出的建物邊緣之誤差。因此在後續進行誤差距離量測統計評估作業時,則 需盡量避免此問題所造成的影響。 5-3-2 實驗區Ⅰ 5-3-2-1 比對目標建物 實驗區Ⅰ房屋型態多為高層建物,依不同的門檻值設定挑選不同高度的目 標建物來進行比對,欲比對之目標建物如圖17所示,共4 棟建物進行評估,其 中建物4 依型態分成建物 4A 及 4B 兩部分,各目標建物資訊如表6。
圖17 實驗區Ⅰ比對目標建物 表6 實驗區Ⅰ目標建物資訊 建物名稱 房高 (m) 高度門檻值 (m) 所涵蓋 2002LiDAR 航帶編號(飛航方向) 所涵蓋 2005LiDAR 航帶編號(飛航方向) 建1 18 12 15(←), 16(←), 17(←) 35(↓) 建2 13 12 15(←), 16(←), 17(←) 35(↓), 36(↑) 建3 24 18 13(→), 14(→), 15(←), 16(←) 35(↓), 36(↑) 建4 40 18 14(→), 15(←), 16(←), 17(←) 34(↑), 36(↓) 5-3-2-2 視覺疊圖比對 (1) 2002LiDAR 將2002LiDAR 的建物 1 點雲疊合 1/1000 線繪圖,可看出航帶 15、17 之建 物點雲成果有向東偏移情形,而航帶16 之建物點雲則無明顯偏移,如圖18。 圖18 2002LiDAR 建物 1 點雲疊合 1/1000 線繪圖 圖19檢視建物1 位於航帶 16 與航帶 15、17 掃描區域之間的關係,可看出 建物1 分布於航帶 16 掃描區域中央時,其建物點雲成果偏移情形較不明顯,反 之建物1 位於航帶 15、17 等掃描角角度較大的航帶兩端區域時,其建物點雲成 果偏移情形較明顯。
圖19 建物 1 與 2002LiDAR 各航帶掃描區域分布關係 相同情形於2002LiDAR 的建物 2,如圖20所示。 圖20 2002LiDAR 建物 2 點雲疊合 1/1000 線繪圖 圖21中呈現建物3 分布於航帶 13 的點雲雖然只於北方屋角一小處,但可 看出該群點雲是向西的偏移方向,與其它航帶的偏移情形不同,此一情形可能與 其飛航掃描方向有關,航帶13 是向東方進行飛航掃描,而航帶 15、16 則是向西 方進行飛航掃描,因此2002LiDAR 有此一現象產生。而紅框處突出的點則是因 為一與屋頂面同高的屋簷所影響,其剖面如圖22。 圖21 2002LiDAR 建物 3 點雲疊合 1/1000 線繪圖 圖22 建物 3 點雲分類成果中包含與屋頂面同高的屋簷點雲 相同情形於2002LiDAR 的建物 4,如圖23所示。 航 帶 寬
圖23 2002LiDAR 建物 4 點雲疊合 1/1000 線繪圖 (2) 2005LiDAR 2005LiDAR 的建物 1、2 點雲疊合 1/1000 線繪圖,可看出航帶 35、36 之建 物點雲成果有向北偏移情形,如圖24。其中航帶35 是向南方進行飛航掃描,航 帶36 則是向北方進行飛航掃描,但其建物點雲成果皆向北偏移,因此其偏移情 形與掃描航向之間的關係不明顯。 圖24 2005LiDAR 建物 1、2 點雲疊合 1/1000 線繪圖 相同情形於2002LiDAR 的建物 3、4,如圖25、26所示。 圖25 2005LiDAR 建物 3 點雲疊合 1/1000 線繪圖
圖26 2005LiDAR 建物 4 點雲疊合 1/1000 線繪圖 實驗區Ⅰ建物點雲萃取成果經疊圖比對,呈現二時期光達成果含有方向性 的誤差,其原因可能和飛航掃描的方向(2002 飛東西向;2005 飛南北向)以及 GPS 定位所引起的誤差有關,人工量測此偏移量約介於0.5m~1.3m。 5-3-2-3 誤差距離量測統計 (1) 建物邊緣 本研究採用的量測方式是先將各個建物依周長分成 30 等分,再以正交於 1/1000 建物線繪圖邊緣的方向量測建物邊緣萃取成果與線繪圖的距離誤差量。若 所取的等分處剛好介於5-1 節所提及受 Closing 影響的邊緣處,則需調整至未受 影響的邊緣上進行量測,以避免評估成果中包含了非真正光達點雲所萃取出的建 物邊緣之誤差,二時期各建物邊緣距離誤差量測成果如表7、8。 表7 實驗區Ⅰ之 2002LiDAR 建物邊緣萃取成果統計 建1 建2 建3 檢核點數 30 30 30 E 向 N 向 D E 向 N 向 D E 向 N 向 D Mean 0.080 -0.017 0.298 0.219 -0.122 0.480 0.107 -0.040 0.558 Rms 0.205 0.303 0.367 0.510 0.397 0.647 0.413 0.519 0.664 Stdv 0.193 0.307 0.217 0.468 0.384 0.441 0.406 0.526 0.366 Max 0.830 0.810 0.861 1.370 0.640 1.834 0.540 0.670 1.639 Min -0.080 -0.600 0.000 -0.590 -1.440 0.041 -0.960 -1.320 0.052 建4A 建4B 整體統計成果 檢核點數 30 30 150 E 向 N 向 D E 向 N 向 D E 向 N 向 D Mean 0.115 -0.084 0.695 0.032 -0.070 0.317 0.111 -0.067 0.470 Rms 0.714 0.411 0.823 0.258 0.205 0.372 0.458 0.389 0.602 Stdv 0.716 0.409 0.447 0.261 0.262 0.198 0.447 0.385 0.377 Max 1.250 1.090 1.614 0.660 0.370 0.934 1.370 1.090 0.000 Min -1.260 -0.810 0.153 -0.330 -0.660 0.026 -1.260 -1.440 1.834
表8 實驗區Ⅰ之 2005LiDAR 建物邊緣萃取成果統計 建1 建2 建3 檢核點數 30 30 30 E 向 N 向 D E 向 N 向 D E 向 N 向 D Mean 0.072 0.471 0.547 0.135 0.321 0.581 -0.019 0.110 0.429 Rms 0.141 0.616 0.634 0.359 0.601 0.702 0.305 0.446 0.542 Stdv 0.123 0.403 0.326 0.338 0.517 0.400 0.310 0.440 0.337 Max 0.210 1.310 1.333 1.220 1.200 1.652 0.760 1.330 1.335 Min -0.240 -0.600 0.042 -0.720 -0.810 0.020 -0.540 -0.740 0.026 建4A 建4B 整體統計成果 檢核點數 30 30 150 E 向 N 向 D E 向 N 向 D E 向 N 向 D Mean -0.055 0.108 0.267 -0.068 -0.033 0.299 0.013 0.195 0.424 Rms 0.213 0.244 0.325 0.219 0.276 0.352 0.259 0.464 0.532 Stdv 0.209 0.223 0.188 0.212 0.278 0.189 0.259 0.422 0.322 Max 0.300 0.660 0.702 0.320 0.440 0.780 1.220 1.330 0.008 Min -0.510 -0.420 0.008 -0.470 -0.620 0.032 -0.720 -0.810 1.652 將各建物各量測誤差分為E 向、N 向及距離(D)進行統計分析。統計成果顯 示建1、建 2 等東西向長形建物,以 2002LiDAR 的 N 向成果較 2005LiDAR 佳; E 向的成果則以 2005LiDAR 較佳,建 3、建 4A 之 2005LiDAR 平面成果較 2002LiDAR 佳,而建 4B 二時期之統計成果則相近。 整體上 2005LiDAR 萃取成果皆較 2002LiDAR 萃取成果好。但建物 1、建 物2 的部分,由於 2005LiDAR 萃取成果較向北側偏移,又該建物東西向的邊緣 較長,因此量測出的平均距離誤差值較2002LiDAR 萃取成果高。另外,於視覺 疊圖比對中可看出2002LiDAR 建物點雲成果受飛航掃描方向之影響較明顯,且 該年成果於建物3、4 包含了東西向偏移的航帶點雲重疊影響,因而致使所評估 之誤差總值增大;相對的2005LiDAR 受飛航掃描方向影響則不明顯。 各時期光達資料整體統計成果顯示2002LiDAR 在 E 向的誤差平均偏移量約 為0.111m、均方根誤差為 0.458m、標準偏差為 0.447m,N 向的誤差平均偏移量 約為-0.067m、均方根誤差為 0.389m、標準偏差為 0.385m,其結果為 N 向較 E 向佳;2005LiDAR 在 E 向的誤差平均偏移量約為 0.013m、均方根誤差為 0.259m、 標準偏差為0.259m,N 向的誤差平均偏移量約為 0.195m、均方根誤差為 0.464m、 標準偏差為0.422m,其結果為 E 向較 N 向佳;2002LiDAR 平面精度之平均偏移 量約為0.470m、均方根誤差為 0.602m、標準偏差為 0.377m;2005LiDAR 平面精 度平均偏移量約為0.424m、均方根誤差為 0.532m、標準偏差為 0.322m。 (2) 建物角點 雖然光達資料具有豐富的三維資訊,但由於光達資料的離散特性,因此對 於建物邊緣及建物角點的特徵描述仍不足,使得建物邊緣萃取成果呈現平滑狀。 本研究將建物邊緣的萃取成果以霍夫轉換法(Hough Transform)偵測直線邊緣相 交處,作為光達點雲之建物角點,並與 1/1000 線繪圖之角點進行偏移量評估。 實驗區Ⅰ以建物1、建物 2、建物 3 及建物 4B 進行 Hough 直線偵測,偵測成果 如表9.a。將延伸線段進行裁切修剪,並與1/1000 線繪圖疊合,各建物比對角點
如表9.b紅框處所示,統計成果如表10、11。 表9 實驗區Ⅰ之 Hough 直線偵測與評估角點選取 (a) (b) 表10 實驗區Ⅰ之 2002LiDAR 建物角點誤差統計 建1 建2 建3 檢核點數 4 10 3 E 向 N 向 D E 向 N 向 D E 向 N 向 D Mean 0.285 0.170 0.533 0.571 0.111 0.747 0.177 0.370 0.427 Rms 0.526 0.208 0.566 0.735 0.346 0.812 0.215 0.397 0.452 Stdv 0.511 0.139 0.220 0.488 0.345 0.337 0.150 0.177 0.180 Max 0.820 0.290 0.849 1.310 0.560 1.328 0.320 0.530 0.619 Min -0.410 -0.030 0.341 -0.190 -0.560 0.259 0.020 0.180 0.262 建4B 整體統計成果 檢核點數 4 21 E 向 N 向 D E 向 N 向 D Mean -0.015 0.165 0.597 0.349 0.170 0.632 Rms 0.543 0.285 0.614 0.611 0.321 0.690 Stdv 0.627 0.269 0.166 0.514 0.280 0.284 Max 0.750 0.450 0.760 1.310 0.560 1.328 Min -0.630 -0.120 0.410 -0.630 -0.560 0.259
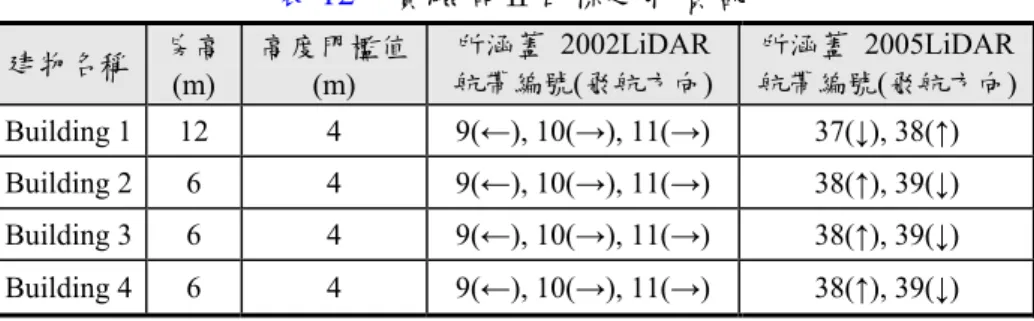
表11 實驗區Ⅰ之 2005LiDAR 建物角點誤差統計 建1 建2 建3 檢核點數 4 12 3 E 向 N 向 D E 向 N 向 D E 向 N 向 D Mean 0.000 0.753 0.765 0.041 0.776 1.002 -0.050 0.390 0.793 Rms 0.149 0.776 0.790 0.642 0.889 1.096 0.158 0.798 0.813 Stdv 0.173 0.220 0.231 0.669 0.452 0.465 0.183 0.852 0.224 Max 0.140 0.970 1.002 1.220 1.560 1.991 0.110 1.020 1.026 Min -0.250 0.530 0.536 -1.550 -0.150 0.481 -0.250 -0.580 0.580 建4B 整體統計成果 檢核點數 4 23 E 向 N 向 D E 向 N 向 D Mean -0.145 0.290 0.464 -0.010 0.637 0.840 Rms 0.251 0.432 0.499 0.483 0.795 0.930 Stdv 0.237 0.369 0.213 0.494 0.487 0.409 Max 0.050 0.610 0.612 1.220 1.560 1.991 Min -0.490 -0.130 0.153 -1.550 -0.580 0.153 統計成果顯示,2002LiDAR 除建物 3 以外,其餘建物之 N 向的成果均較佳; 2005LiDAR 於 E 向的成果均較佳。整體統計成果顯示 2002LiDAR 在 E 向的誤差 平均偏移量約為0.349m、均方根誤差為 0.611m、標準偏差為 0.514m,N 向的誤 差平均偏移量約為0.170m、均方根誤差為 0.321、標準偏差為 0.280mm,其結果 為N 向較 E 向佳;2005LiDAR 在 E 向的誤差平均偏移量約為-0.010m、均方根誤 差為0.483m、標準偏差為 0.494m,N 向的誤差平均偏移量約為 0.637m、均方根 誤差為0.795m、標準偏差為 0.487m,其結果為 E 向較 N 向佳。 5-3-3 實驗區Ⅱ 5-3-3-1 比對目標建物 實驗區Ⅱ房屋型態多為平房建物,以 4m 作為其高度門檻值,欲比對之目 標建物如圖27,各目標建物資訊如表12。 圖27 實驗區Ⅱ比對目標建物
表12 實驗區Ⅱ目標建物資訊 建物名稱 房高 (m) 高度門檻值 (m) 所涵蓋 2002LiDAR 航帶編號(飛航方向) 所涵蓋 2005LiDAR 航帶編號(飛航方向) Building 1 12 4 9(←), 10(→), 11(→) 37(↓), 38(↑) Building 2 6 4 9(←), 10(→), 11(→) 38(↑), 39(↓) Building 3 6 4 9(←), 10(→), 11(→) 38(↑), 39(↓) Building 4 6 4 9(←), 10(→), 11(→) 38(↑), 39(↓) 5-3-3-2 視覺疊圖比對 (1) 2002LiDAR 圖28將2002LiDAR 的 Building1 點雲疊合 1/1000 線繪圖,可看出航帶 9、 10 之建物點雲成果於建物東北側邊緣(藍框處)有點雲分布,另外航帶 9 之建物點 雲成果於建物東南側邊緣(綠框處)有點雲分布,而航帶 11 之建物點雲則無明顯 偏移。表12顯示航帶9、10 為相反之飛航掃描方向成果,但 Building1 建物點雲 成果卻同時存在向東偏移之點雲群。經圖29剖面檢視得知,航帶9、10 偏移點 雲群並非屋頂邊緣點雲,而是該房屋較低處的點雲所致。這是因為4m 高度門檻 值不適合用以分類該 12m 房高之建物屋頂點雲。而由圖 30 剖面檢視 Building1 東南側邊緣之航帶 9 點雲則確實有偏移情形存在,人工量測其偏移量約介於 0.23m~1.0m。 圖28 2002LiDAR 的 Building1 點雲疊合 1/1000 線繪圖 2002LiDAR 系統誤差 建物點雲成果 圖29 剖面檢視 Building1 東北側邊緣點雲分類受房屋較低處的點雲影響
圖30 剖面檢視 Building1 東南側邊緣點雲確實有偏移 圖 31將 2002LiDAR 的 Building2 點雲疊合 1/1000 線繪圖,可看出航帶 9 之建物點雲成果有向東偏移情形,而航帶 10、11 之建物點雲則無明顯偏移。經 圖32剖面檢視得知,Building2 東側建物邊緣之航帶 9 點雲確實有偏移存在,人 工量測其偏移量約介於0.11m~0.9m。 圖31 2002LiDAR 的 Building2 點雲疊合 1/1000 線繪圖 圖32 剖面檢視 Building2 的東側建物邊緣點雲確實有偏移 相同情形於2002LiDAR 的 Building3、Building4 建物點雲成果,如圖33、 34。人工量測各建物偏移量約介於0.16m~0.91m、0.31m~1.15m。 圖33 2002LiDAR 的 Building3 點雲疊合 1/1000 線繪圖
圖34 2002LiDAR 的 Building4 點雲疊合 1/1000 線繪圖 (2) 2005LiDAR 圖35將2005LiDAR 的 Building1 點雲疊合 1/1000 線繪圖,可看出航帶 37 之建物點雲成果有些微向北偏移的情形,人工量測其偏移量約介於0.1m~0.2m。 航帶38 之建物點雲成果則看似有向東偏移情形,然而其建物東北側邊緣點雲同 2002LiDAR 的航帶 9、10 偏移點雲群,是由房屋較低處的點雲所致,經人工量 測其東南側邊緣偏移量約介於0.15m~0.74m。 圖35 2005LiDAR 的 Building1 點雲疊合 1/1000 線繪圖
圖36.a~36.c為2005LiDAR 航帶 38、39 的 Building2~4 點雲成果疊合 1/1000
線繪圖,整體上可看出航帶38 之建物點雲成果存在著些微東南向的偏移情形,
航帶39 則無明顯偏移。
(a) (b) (c)
實驗區Ⅱ之建物點雲萃取成果經視覺疊圖比對後,呈現2002LiDAR 成果之 方 向 性 誤 差 情 形 較 明 顯 可 見 , 其 中 以 航 帶 9 之建物點雲成果最為明顯; 2005LiDAR 整體偏移情形較不明顯,但還是依然可由航帶 38 之建物點雲成果看 出其偏移和飛航掃描方向有些相關,人工量測此偏移量約介於0.15m~0.74m。 5-3-3-3 誤差距離量測統計 (1)建物邊緣 二時期各建物邊緣距離誤差量測成果如表13、14。 表13 實驗區Ⅱ之 2002LiDAR 建物邊緣萃取成果統計
Building1 Building2 Building3
檢核點數 30 30 30 E 向 N 向 D E 向 N 向 D E 向 N 向 D Mean 0.270 0.030 0.484 0.362 -0.079 0.525 0.271 -0.284 0.485 Rms 0.460 0.403 0.612 0.408 0.391 0.565 0.317 0.451 0.551 Stdv 0.379 0.409 0.381 0.191 0.389 0.213 0.167 0.357 0.267 Max 1.100 0.800 1.360 0.760 0.430 0.904 0.730 0.400 0.917 Min -0.350 -0.830 0.014 0.100 -0.800 0.117 -0.020 -0.810 0.022 Building4 整體統計成果 去除 Building1 低點影響 檢核點數 30 120 110 E 向 N 向 D E 向 N 向 D E 向 N 向 D Mean 0.232 -0.139 0.387 0.284 -0.118 0.470 0.233 -0.177 0.425 Rms 0.435 0.280 0.517 0.409 0.387 0.562 0.368 0.371 0.522 Stdv 0.374 0.247 0.349 0.295 0.370 0.310 0.273 0.328 0.288 Max 1.040 0.530 1.163 1.100 0.800 1.360 1.040 0.530 1.163 Min -0.150 -0.520 0.010 -0.350 -0.830 0.010 -0.350 -0.830 0.010 表14 實驗區Ⅱ之 2005LiDAR 建物邊緣萃取成果統計
Building1 Building2 Building3
檢核點數 30 30 30 E 向 N 向 D E 向 N 向 D E 向 N 向 D Mean 0.292 0.052 0.445 0.012 -0.105 0.252 0.002 -0.050 0.224 Rms 0.393 0.361 0.534 0.198 0.250 0.318 0.177 0.272 0.325 Stdv 0.268 0.364 0.301 0.201 0.230 0.198 0.180 0.272 0.239 Max 0.780 0.580 1.143 0.440 0.420 0.904 0.500 0.750 1.047 Min -0.350 -0.940 0.014 -0.430 -0.790 0.000 -0.410 -0.920 0.022 Building4 整體統計成果 去除 Building1 低點影響 檢核點數 30 120 110 E 向 N 向 D E 向 N 向 D E 向 N 向 D Mean -0.009 -0.063 0.271 0.074 -0.041 0.298 0.047 -0.082 0.274 Rms 0.215 0.240 0.322 0.260 0.285 0.386 0.213 0.270 0.344 Stdv 0.218 0.235 0.177 0.251 0.283 0.246 0.211 0.259 0.217 Max 0.440 0.560 0.622 0.780 0.750 1.143 0.650 0.750 1.143 Min -0.460 -0.450 0.014 -0.460 -0.940 0.000 -0.460 -0.940 0.000 各時期距離誤差統計成果之均方根誤差及標準偏差值均顯示 Building1 的 誤差值大於其餘建物,這是因為該建物邊緣萃取成果受到房屋較低處的點雲影響 所致。因此表12中除了進行該4 棟建物整體之邊緣萃取成果的誤差距離量測統
計外,並將Building1 誤差距離量測受低點影響的東北側邊緣成果去除統計之。 各建物統計結果顯示2005LiDAR 平面成果之均方根誤差皆較 2002LiDAR 小,且 2002LiDAR 的 E 向誤差大於 N 向誤差;2005LiDAR 的 N 向誤差大於 E 向誤差, 二實驗區之評估成果皆顯示垂直航向方向之平面精度優於平行航向方向之平面 精度。 各時期光達資料去除建物邊緣萃取成果中Building1 受影響的部分後,其整 體統計成果顯示2002LiDAR 在 E 向的誤差平均偏移量約為 0.233m、均方根誤差 為0.368m、標準偏差為 0.273m,N 向的誤差平均偏移量約為-0.177m、均方根誤 差為0.371m、標準偏差為 0.328m,平面精度之平均偏移量約為 0.425m、均方根 誤差為0.522m、標準偏差為 0.288m;2005LiDAR 在 E 向的誤差平均偏移量約為 0.047m、均方根誤差為 0.213m、標準偏差為 0.211m,N 向的誤差平均偏移量約 為-0.082m、均方根誤差為 0.270m、標準偏差為 0.259m,平面精度平均偏移量約 為0.274m、均方根誤差為 0.344m、標準偏差為 0.217m。 相較於實驗區Ⅰ而言,實驗區Ⅱ整體統計成果的方向性誤差之差異程度較 不明顯;但由視覺疊圖比對中還是能看出2002LiDAR 於部分航帶點雲成果中有 明顯的方向性偏移存在;反之2005LiDAR 則較不明顯。 (2)建物角點 二時期各建物角點距離誤差統計成果如表15、16。 表15 實驗區Ⅱ之 2002LiDAR 建物角點誤差統計
Building1 Building2 Building3
檢核點數 4 4 4 E 向 N 向 D E 向 N 向 D E 向 N 向 D Mean 0.402 -0.127 0.717 0.557 -0.310 0.650 0.265 -0.397 0.575 Rms 0.620 0.448 0.765 0.607 0.342 0.697 0.431 0.441 0.617 Stdv 0.545 0.496 0.309 0.277 0.167 0.289 0.393 0.220 0.257 Max 1.030 0.320 1.079 0.810 -0.220 0.928 0.660 -0.180 0.834 Min -0.300 -0.760 0.410 0.200 -0.560 0.297 -0.130 -0.650 0.222 Building4 整體統計成果 去除 Building1 受影響處 檢核點數 4 16 14 E 向 N 向 D E 向 N 向 D E 向 N 向 D Mean 0.313 -0.318 0.651 0.384 -0.288 0.648 0.297 -0.386 0.629 Rms 0.359 0.609 0.707 0.517 0.470 0.698 0.462 0.492 0.675 Stdv 0.204 0.600 0.317 0.357 0.383 0.268 0.334 0.339 0.258 Max 0.610 0.470 1.054 1.030 0.470 1.079 0.810 0.470 1.054 Min 0.150 -0.860 0.324 -0.300 -0.860 0.222 -0.300 -0.860 0.222
表16 實驗區Ⅱ之 2005LiDAR 建物角點誤差統計
Building1 Building2 Building3
檢核點數 4 4 4 E 向 N 向 D E 向 N 向 D E 向 N 向 D Mean 0.435 0.202 0.514 -0.098 -0.163 0.362 -0.080 -0.052 0.227 Rms 0.477 0.312 0.570 0.294 0.248 0.385 0.185 0.144 0.234 Stdv 0.225 0.275 0.286 0.320 0.217 0.150 0.192 0.154 0.063 Max 0.630 0.540 0.729 0.270 0.100 0.510 0.160 0.070 0.298 Min 0.110 -0.050 0.110 -0.500 -0.350 0.166 -0.290 -0.260 0.171 Building4 整體統計成果 去除 Building1 受影響處 檢核點數 4 16 14 E 向 N 向 D E 向 N 向 D E 向 N 向 D Mean -0.045 -0.063 0.421 0.053 -0.019 0.381 0.022 -0.074 0.330 Rms 0.319 0.311 0.445 0.335 0.263 0.426 0.288 0.226 0.366 Stdv 0.364 0.352 0.167 0.342 0.271 0.197 0.298 0.219 0.158 Max 0.400 0.210 0.640 0.630 0.540 0.729 0.510 0.210 0.640 Min -0.390 -0.570 0.233 -0.500 -0.570 0.110 -0.500 -0.570 0.110 角點距離誤差統計成果顯示各建物之標準偏差皆大於邊緣誤差距離量測統 計成果之標準偏差,表示其評估成果較邊緣誤差統計成果來的不穩定。各時期光 達資料去除建物角點萃取成果中Building1 受影響的部分後,整體統計成果顯示 2002LiDAR 在 E 向的誤差平均偏移量約為 0.297m、均方根誤差為 0.462m、標準 偏差為0.334m,N 向的誤差平均偏移量約為-0.386m、均方根誤差為 0.492、標 準偏差為0.339mm;2005LiDAR 在 E 向的誤差平均偏移量約為 0.022m、均方根 誤差為0.288m、標準偏差為 0.298m,N 向的誤差平均偏移量約為-0.074m、均方 根誤差為0.226m、標準偏差為 0.219m。上列比對成果皆顯示 2005LiDAR 之平面 成果優於2002LiDAR 平面成果。 5-4 結論 視覺疊圖比對的部分呈現出位於實驗區Ⅰ、Ⅱ的2002LiDAR 部分航帶點雲 成果皆有向東偏移之情形;而2005LiDAR 點雲於實驗區Ⅰ有向北偏移的情形, 於實驗區Ⅱ的方向性偏移情形則較不明顯,不過透過建物邊緣的誤差距離量測統 計成果仍可看出整體上 N 向的偏移量還是大於 E 向。另外,實驗區Ⅰ的 2002LiDAR 點雲資料在掃描角度較大的建物區域,其建物邊緣萃取成果外擴的 情形較為明顯,可能是因為2002LiDAR 資料本身即含有系統性的誤差所致,但 因缺乏該數據之時間戳紀(Time Stamps)以及解算之航行軌跡(Trajectory),因此無 法進行驗證。 誤差距離量測統計部分,由實驗區Ⅰ、Ⅱ中各建物邊緣的統計成果顯示, 2002LiDAR平面萃取成果之N向較E向為佳;2005LiDAR平面萃取成果之E向則較 N向為佳,但實驗區Ⅱ的偏移量小於實驗區Ⅰ。建物角點的誤差距離量測統計成 果顯示,實驗區Ⅰ的方向性偏移情形較實驗區Ⅱ的評估成果明顯。而二實驗區皆 顯示,以建物角點偵測的距離誤差量較建物邊緣萃取成果評估的誤差值大,由其 標準偏差值可看出此方法的量測統計成果較不穩定,因此本研究中應屬建物邊緣 萃取成果的誤差距離量測統計結果較準確。由整體E向與N向的標準偏差及均方 根誤差顯示,本方法評估出的空載光達平面誤差量介於0.211m~0.795m之間,該
量級約為三倍高程誤差,與儀器規格相當。 二時期評估成果顯示,垂直於航向方向之平面精度優於平行航向方向之平面 精度,且2005LiDAR 建物邊緣萃取成果皆較 2002LiDAR 穩定,可能是因為 2002LiDAR 資料本身即含有系統性的誤差,因此導致 2002LiDAR 建物點雲資料 於航帶邊緣兩側區域,其建物邊緣萃取成果平移情形較為明顯。而2005LiDAR 於實驗區Ⅰ的方向性偏移情形較實驗區Ⅱ成果明顯,經視覺疊圖比對可看出該是 因為分布於實驗區Ⅰ的航帶掃描成果皆存在著向北的偏移,而分布於實驗區Ⅱ的 航帶掃描成果則較無明顯的偏移情形存在。 六、參考文獻 王蜀嘉、曾義星,2003。以空載光達方法生產高精度及高解析度數值地形模型及 數值地表模型誤差分析。內政部委託研究計畫報告。 史天元、彭淼祥,2003。空載光達數據檢查:以農委會台灣地區測試新竹部分為 例。第一屆數位地球國際研討會。台北文化大學。 史天元、劉進金,2004。空載光達系統誤差處理。行政院農業委員會九十三年度 試驗研究計畫研究報告。農委會 93 農科-2.5.1-技-a2 計畫報告,共 97 頁。 執行機關:國立交通大學。合作機關:工業技術研究院。 童俊雄、曾義星、王淼,2005,以航帶平差吸收空載光達系統誤差之研究,第二 十四屆測量學術及應用研討會,323-330。
Ahokas, E. and H. Kaartinen and J. Hyyppä, 2004. A quality assessment of repeated airborne laser scanner observations, International Archives of Photogrammetry and Remote Sensing, Istanbul.
Alharthy, A. and J. Bethel, 2002. Heuristic filtering and 3D feature extraction from LiDAR data, International Archives of Photogrammetry and Remote Sensing, Vol.XXXIII, pp. 29-35, Graz, Austria.
Alharthy, A. and J. Bethel and E.M. Mikhail, 2004. Analysis and accuracy assessment of airborne laserscanning system, International Archives of Photogrammetry and Remote Sensing, Vol. XXXV, Part B2, pp. 144-149.
Behan A., 2000, On the matching accuracy of rasterised scanning laser altimeter data. ISPRS, 33
Clode, S. and P. Kootsookos and F. Rottensteiner, 2004. The automatic extraction of roads from LiDAR data, In ISPRS 2004, 12 - 23 July, 2004, Istanbul, Turkey. Clode, S. and F. Rottensteiner and P. Kootsookos, 2005. Improving city model
determination by using road detection from LiDAR data, In Joint Workshop of ISPRS and the German Association for Pattern Recognition (DAGM), 'Object Extraction for 3D City Models, Road Databases and Traffic Monitoring - Concepts, Algorithms, and Evaluation' (CMRT05), 29-30 August, 2005, Vienna,
Austria.
Crombaghs M.J.E., Brugelmann R., and De Min E.J., 2000, On the adjustment of overlapping strips of laseraltimeter height data. ISPRS, 33, 230-237.
Elberink, S. O. and H.G. Mass, 2000. The use of anisotropic height texture measures for the segmentation of airborne laser scanner data, International Archives of Photogrammetry and Remote Sensing, Vol.XXXIII, Part B3, pp. 678-684, Amsterdam.
Huising, E.J. and L.M.G. Pereira, 1998. Errors and accuracy estimates of laser data acquired by various laser scanning systems for topographic applications”, ISPRS Journal of Photogrammetry and Remote Sensing, Vol.53, pp. 245-261.
Latypov, D., 2002. Estimating relative lidar accuracy information from overlapping flight lines. ISPRS, 56, 236-245.
Mass H.-G., 2000. Least-Square Matching with Airborne Laserscanning Data in a TIN Structure. Interational Archives of Photogrammetry and Remote Sensing. vol.33, Part 3A, pp. 548-555 Amsterdam.
Mass H.-G., 2001. On the use of pulse reflectance data for laserscanner strip adjustment”, International Archives of Photogrammetry and Remote Sensing, Vol.XXXIV, Part 3/W4, pp. 53-56.
Mass H.-G., 2002. Methods for measuring height and planimetry discrepancies in airborne laserscanner data. Photogrammetric Engineering & Remote Sensing. 68(9):933-940
Rottensteiner, F. and Ch. Briese, 2002. A new method for extraction in urban areas from high-resolution LIDAR data”, ISPRS Journal of Photogrammetry and Remote Sensing, Vol.XXXIII, pp. 295-301, Graz, Austria.
Terrasolid, 2004, TerraScan user guide (18.11.2004), Terrasolid.
Vögtle, T. and E. Steinle, 2000. 3D modeling of building using laser scanning and spectral information, Interational Archives of Photogrammetry and Remote Sensing, Vol.XXXIII, Part B3, pp. 927-934, Amsterdam.
Vosselman, G., Maas, H.-G., 2001: Adjustment and filtering of raw laser altimetry data. OEEPE Workshop on Airborne Laserscanning and Interferometric SAR for Detailed Digital Elevation Models, Stockholm, 1.-3. march 2001.