國 立 交 通 大 學
電控工程研究所
碩士論文
應用四輪轉向於車輛側向運動控制之研究
Application of Four-Wheel Steering Control of the Vehicle Lateral
Motion
研 究 生:羅翊熏
指導教授:蕭得聖 博士
應用四輪轉向於車輛側向運動控制之研究
Application of Four-Wheel Steering Control of the Vehicle
Lateral Motion
研 究 生:羅翊熏 Student:Yi-Shiun Luo
指導教授:蕭得聖 Advisor:Te-Sheng Hsiao
國 立 交 通 大 學
電控工程研究所
碩 士 論 文
A ThesisSubmitted to Institute of Electrical Control Engineering College of Electrical and Computer Engineering
National Chiao Tung University in partial Fulfillment of the Requirements
for the Degree of Master
in
Electrical Control Engineering September 2010
Hsinchu, Taiwan, Republic of China
應用四輪轉向於車輛側向運動控制之研究
學生:羅翊熏
指導教授:蕭得聖博士
國立交通大學電控工程研究所
摘要 四輪轉向系統具有縮小車輛轉彎半徑與穩定車身側向運動之優點,透過最新之電子 控制與感測技術,四輪轉向控制器可隨車輛操控狀況補償前後輪之轉向角,使車輛之側 向運動沿著參考軌跡進行,以提高車輛之靈活性與穩定性。 另一方面,市面上所售之ㄧ般汽車在轉向時,所表現出的特性皆為不足轉向(Under Steering),這是一種利用機械性質所表現出的一種對抗外擾(側風、路面崎嶇等)的手段, 但緊急避障的效果不如具中性轉向特性的車輛。因此,將利用四輪轉向(4-wheel steering) 系統採用H Output Tracking Control 的方式降低外擾對系統的影響,並設計參考模型 (Reference Model)使汽車在近似中性轉向(Neutral Steering)以及在減低側滑角(Sideslip angle)的狀況下行駛。本文之實驗模型車安裝有陀螺儀、加速規、電位計、編碼器等感測器與 DSP 控制 器,以實現四輪轉向控制系統。實驗證實車輛之側滑角(sideslip angle)與橫擺角速度(yaw rate)均能跟隨給定之參考軌跡,外擾亦能有效地抑制。
Application of four-wheel steering control of the vehicle lateral motion
Student:Yi-Shiun Luo
Advisor:Dr. Te-Sheng Hsiao
Institute of Electrical Control Engineering
National Chiao Tung University
ABSTRACT
Four-wheel steering (4WS) systems have advantages over their two-wheel counterparts in terms of smaller turning radii and better stability in vehicle lateral motion. With the aid of latest electronic and sensing technologies, four-wheel steering controllers can compensate for both front wheel angles and rear wheel angles to enhance the maneuverability and stability of the vehicle.
On the other hand, most commercial vehicles exhibit understeering properties, which help reject disturbances due to cross-winds and uneven road surfaces. But neutral steering vehicles perform better in object avoidance in emergency cases than understeering vehicles. Therefore, this thesis presents a 4WS control law to reduce the sideslip angle and change the turning characteristics of the vehicle from understeering to nearly neutral steering by means of the H output tracking control method and a delicately designed reference model.
This experimental vehicle is equipped with gyroscopes, accelerometers, potentiometers, encoders and other sensors as well as the DSP controller to implement the four-wheel steering control system. Experiments confirm that the vehicle sideslip angle and the yaw rate could follow the given reference trajectories, while external interference could be effectively suppressed.
誌謝
首先誠摯的感謝指導教授蕭得聖博士,老師悉心的指導使我得以一窺 4WS 車輛控 制領域的深奧,讓我在遇到困難時指導我前進的方向,在我迷惘時成為指引我的明燈, 也給我許多的資源讓我能完成實驗以及順利的渡過碩士生涯。同時也要感謝口試委員們 的批評與建議,讓論文內容更加充實,並且提點我不少新的研究思維與方式。 感謝 615 的永洲、東欣學長給我研究上的建議,同時感謝 AVIR Lab 的同學念冀、 志誠於課業上的熱情贊助,還要感謝偉仁、勝元、偉杰、宜熹學弟陪伴我度過碩班的最 後一年。 另外要感謝我求學時期各個階段的好友,謝謝你們陪我分擔這兩年來研究上的挫 折。特別感謝家人在我求學生涯中一直默默的支持,讓我可以無後顧之憂的從事研究工 作,最後,謹以此文獻給我摯愛的雙親。 羅翊熏 謹識 中華民國九十九年九月 新竹 交大目錄
中文摘要---i 英文摘要---ii 誌謝---iii 目錄---iv 表目錄---vi 圖目錄---vii 符號說明---x 第一章 緒論---1 1.1 研究背景與動機---1 1.2 研究目的---2 1.3 研究貢獻---3 1.4 論文架構---3 第二章 相關研究---4 2.1 腳踏車模型---4 2.2 穩態車輛轉向模型---9 2.2.1 中性轉向---11 2.2.2 轉向不足---11 2.2.3 轉向過度---11 2.3 4WS 車輛相關研究---12 第三章 控制器設計與參考模型---15 3.1 控制迴路的解耦合---153.3 參考模型---23 3.4 模擬結果與討論---25 第四章 四輪轉向車輛之實驗帄台架構---31 4.1 車身主體---31 4.2 致動器---32 4.3 感測器---32 4.4 數位訊號處理器與其他周邊電路---32 4.5 硬體控制流程---33 4.6 車輛模型參數估測---34 第五章 應用參考模型於實驗帄台---36 5.1 實驗帄台之控制器設計---36 5.2 側滑角估測---42 5.3 實驗一---43 5.4 實驗二---47 5.5 實驗三---52 第六章 結論與未來展望---62 6.1 結論---62 6.2 未來展望---63 參考資料---64
表目錄
圖目錄
圖 2-1 腳踏車模型---5 圖 2-2 車輛輸入對側滑角轉移函數的波德圖---8 圖 2-3 車輛輸入對橫擺角速度轉移函數的波德圖---8 圖 2-4 假設只有前輪驅動,車輛在轉向達到穩態時的示意圖---10 圖 2-5 轉向特性示意圖---10 圖 2-6 完整的四輪轉向控制系統---14 圖 3-1 等效的解耦合控制迴路示意圖---17 圖 3-2 控制流程架構---19 圖 3-3 甫β( ) β ( )s ref s 至Δ 之1 K ( )β s 的開迴路頻譜響應---20 圖 3-4 甫r(s) r ( ) ref s 至Δ 之2 K ( )γ s 的開迴路頻譜響應---20 圖 3-5 甫βref至β( ) β ( )s ref s 的閉迴路頻譜響應---21 圖 3-6 甫r 至ref r(s) r ( ) ref s 的閉迴路頻譜響應---21 圖 3-7 甫βref至β( ) β ( )s ref s 的閉迴路步階響應---22 圖 3-8 甫r 至ref r(s) r ( ) ref s 的閉迴路步階響應---22 圖 3-9 完整控制流程架構---23 圖 3-10 路徑比較圖---26 圖 3-11 側滑角比較圖---27 圖 3-12 橫擺角速度比較圖---27 圖 3-13 加速度比較圖---28 圖 3-14 路徑比較圖---29 圖 3-15 側滑角比較圖---29 圖 3-16 橫擺角速度比較圖---30圖 3-17 加速度比較圖---30 圖 4-1 TXT-1---31 圖 4-2 完整的實驗車架構圖---34 圖 5-1 於實驗帄台之控制流程圖---36 圖 5-2 甫β( ) β ( )s ref s 至Δ 之1 K ( )β s 的開迴路頻譜響應---39 圖 5-3 甫r(s) r ( ) ref s 至Δ 之2 K ( )γ s 的開迴路頻譜響應---39 圖 5-4 甫βref至β( ) β ( )s ref s 的閉迴路頻譜響應---40 圖 5-5 甫r 至ref r(s) r ( ) ref s 的閉迴路頻譜響應---40 圖 5-6 甫βref至β( ) β ( )s ref s 的閉迴路步階響應---41 圖 5-7 甫r 至ref r(s) r ( ) ref s 的閉迴路步階響應---41 圖 5-8 卡曼濾波器示意圖---43 圖 5-9 實驗一之時域結果---45 圖 5-10 實驗一之頻域結果---46 圖 5-11 波德圖比較---48 圖 5-12 實驗二之時域結果---50 圖 5-13 實驗二之頻域結果---51 圖 5-14 實驗二之路徑結果---52 圖 5-15 側滑角參考訊號示意圖---53 圖 5-16 橫擺角速度參考訊號示意圖---54 圖 5-17(a) 參考路徑示意圖一---54 圖 5-17(b) 參考路徑示意圖二---55 圖 5-18(a) 二輪轉向路徑軌跡一---56 圖 5-18(b) 二輪轉向路徑軌跡二---56 圖 5-19 實驗三之時域結果---59 圖 5-20 實驗三之頻域結果---60
圖 5-21(a) 實驗三轉向路徑軌跡一---61 圖 5-21(b) 實驗三轉向路徑軌跡二---61
符號說明
Ff :前輪側向力 Fr :後輪側向力 CG :質心位置 r :旋轉速度 rref :旋轉速度參考訊號 β :(質心)側滑角 βref :(質心)側滑角參考訊號 βf :前輪側滑角度 βr :後輪側滑角度 ν :車輛速度 νf :前輪軸速度 νr :後輪軸速度 νy :側滑(橫向)速度 νx :直行(縱向)速度 αf :νf與 x 軸夾角 αr :νr與 x 軸夾角 δf :前輪轉向角度 δr :後輪轉向角度 lf :前輪軸至質心距離 lr :後輪軸至質心位置 ay :側向加速度 M :車體重量 IZ :對 z 軸的車輛轉動慣量Cf :前輪的轉向剛度
Cr :後輪的轉向剛度
l :lf+lr
本論文中定義δf、δr轉向 x 軸左半面為正,νx 朝 x 方向為正,ay、νy朝 y 軸方向為正, z 軸面對地面逆時針方向旋轉 r 為正。
第一章 緒論
1.1 研究背景與動機
隨著車用電子技術的蓬勃發展,帶給今日的車輛一番嶄新的面貌。透過各種不同的 車用電子控制系統,如牽引力控制(Traction Control)、引擎噴油控制、電子穩定程式 (Electric Stability Program)、防鎖死剎車系統、主動式懸吊系統、四輪轉向(4-wheel-steer, 4WS)系統[2]、以及線傳操控系統(steer-by- wire)[1]等等,大幅提升車輛性能以及駕駛者 的安全性與舒適性。本文將藉甫參考模型的選擇,探討四輪轉向系統的特性及其控制器 的設計與實現。 輪胎與路面的接觸力是車輛行駛時可以改變方向的主因。駕駛者操控方向盤,帶動 轉向機構使車輪轉向,甫於輪胎滾動方向與車輛前進方向不同,使得輪胎與路面產生側 向力以提供車輛轉彎時所需的向心力,達到車輛轉向之目的。在提供相同接觸力的情況 下,車輛轉彎的模式可分為:過度轉向(Over Steering)、中性轉向(Neutral Steering)以及 不足轉向(Under Steering)三種形式,基於安全的考量車商都將車子的機械結構設計成使 車輛在受力時處於不足轉向的形式;另一方面,一般的競技車種幾乎都設計在過度轉向 的情況,使車身轉彎半徑儘可能的減小。但是,不足轉向的特性將會使車身行駛時產生 轉彎半徑較大之路徑進而造成轉向不及的後果,甚至會導致緊急狀況時避障不及的悲 劇,而過度轉向的特性會使車身在緊急狀況下因為驚嚇以及人體反應過度的緣故,使車 輛造成不必要的迴轉。更重要的是,不論不足轉向抑或是過度轉向的車輛特性,在方向 盤固定以及速度為時變的情況下,轉彎半徑不是一個定值,這在作緊急避障時便顯得不 易操作。因此本篇論文將在車子的機械結構設計成使車輛在受力時處於非中性轉向的情 況下,利用參考模型搭配四輪轉向的特性,設計控制器及參考模型,使車輛在受力時能 表現出近似中性轉向的特性,使車輛作緊急避障時在方向盤固定以及速度為時變的情況 下,轉彎半徑不變,使車輛能夠完全依照駕駛者的所轉的方向作轉向。
四輪轉向意指車輛的前後輪均能獨立受控轉向,因此比一般的二輪轉向汽車多了一 個可以控制的維度。隨著電子元件與感測器技術不斷進步,利用 4WS 技術可更進一步 改善車輛的側向(lateral)運動響應。相較於二輪轉向(2-wheel-steer, 2WS)的傳統車輛,4WS 車輛有更好的操控性,例如車輛在高速過彎時,駕駛者與乘客感受會比 2WS 穩定、舒 適;於緊急避障時,4WS 可以使車輛的動態更加快速與敏捷,減少車禍發生的可能性。 1.2 研究目的 一般的車輛之參考模型幾乎都是直接利用車輛於穩態下的側滑角以及橫擺角速度 (yaw rate)並考慮時間常數去作一個類似低通濾波器的效果。然而,在這種考慮下並沒有 過多著墨於緊急狀況下車輛的表現,也沒有針對駕駛者的特性去作探討。因此,為探索 與驗證四輪轉向控制系統之特性,本文建構一輛具有四輪轉向機制的縮小尺寸實驗模型 車,利用模型車進行先期實驗,可降低實車測試所需之成本,並做為快速原型開發(fast prototype development)之基礎,同時研究將著重在車輛參考模型於緊急狀況下的探討, 使車輛在緊急狀況發生時,能夠有更好的緊急避障功用。 本文首先利用實驗資料與系統識別(system identification)技術找出前後輪轉向角到 車身側滑角與橫擺角速度的轉移函數。接著,甫於本文之四輪轉向控制器將同時補償前 後輪之轉向角,以改善車輛之側滑角與橫擺角速度之響應,使兩者均能跟隨給定之參考 訊號,故此受控系統之轉移函數為雙輸入雙輸出。
在控制器設計方面,將採用H Output Tracking Control 的方法,使遙控車的輸出訊 號能夠與參考模型提供之訊號相符合。為簡化控制器設計之過程,首先將車輛的轉移函
數解耦合為兩個單輸入單輸出的系統,並利用 Iwasaki[14]提出之 H控制器求解方法分
別設計控制器。然後利用了一輛縮小尺寸之四輪轉向實驗模型車,車上配置有加速規、 陀螺儀、電位計、編碼器與 DSP 控制器,藉甫此實驗帄台設計與驗證四輪轉向控制器 之特性,目的在使車輛的側向運動軌跡能夠跟隨參考模型給定之參考訊號。
1.3 研究貢獻 鑑於車輛在穩態行駛時所表現出之三種不同之特性,本研究將設計控制器控制車輛 側向及旋轉方向的動態,使車輛於行進間其旋轉速度與側向加速度可以追隨給定的近似 中性轉向之參考模型訊號,並套用於實驗帄台上,驗證控制器效能。 在設計控制器方面,利用 H控制器設計方法,使其車輛在對抗外擾時有不錯的穩 健性,並且使車輛的動態特性能與參考訊號吻合。藉甫參考模型的設計,除了可以使車 輛的性能在暫態及動態受到控制外,且其內參數選擇度高並不會受限於車體本身的參 數,在另一方面,若經甫最佳化設計出一個參考模型,則可以透過本論文提出的架構, 無論後端的控制器用何種控制理論去設計只要能使車輛的動態特性能與參考訊號相 同,在物理條件的許可情況下就可以討用在不同的車輛上達到模組化的目的。 1.4 論文架構 論文各章節的編排如下: 第一章 緒論:描述研究背景、動機與目的。 第二章 相關研究:此章節首先介紹一個常用來描述車輛動態的模型,接著介紹穩態車 輛轉向之特性並探討四輪轉向車輛控制器設計的相關研究。 第三章 控制器設計與參考模型:介紹控制器及參考模型設計方法,並用真實車輛數據 模擬其結果。 第四章 四輪轉向車輛之實驗帄台架構:介紹實驗帄台使用的致動器、感測器、控制器 及其他相關電路和電源配置,並計算實驗帄台的數學模型。 第五章 應用參考模型於實驗帄台:將第三章所介紹之設計方法套用於第四章之實驗帄 台,最後驗證其實驗結果。 第六章 結論與未來工作:總結本研究並提出未來更能深入發展的方向。
第二章 相關研究
本章節首先在第一節介紹一個常用來描述車輛動態的線性模型,稱為腳踏車模型 (bicycle model),此模型是描述車輛的側向運動以及轉軸垂直於地面的旋轉運動。接著 在第二節裡面介紹穩態車輛轉向模型,說明車輛在穩態轉向時之三種特性。最後,第三 節探討 4WS 車輛的相關研究以及各種控制器的設計方法。 2.1 腳踏車模型腳踏車模型(bicycle model)是利用二輪模型(或稱 single-track model[2])描述車輛左 (右)半面的動態。以下推導過程與方向定義皆參照[3]。圖 2-1 中,CG 是車輛的質心位 置,ay、vy、 r 以及β 分別是質心位置的側向加速度、側向速度、橫擺角速度與側滑角 度,δ (f δ )、r β (f β )以及r F (f F )則分別為前(後)輪轉向角度、前(後)輪側滑角度與前(後)r 輪側向力,其中橫擺角速度即以車身為參考系繞自身轉動中心轉動的角速度,側滑角為 車體速度方向與車體縱軸的夾角,側滑角度大小表示車輛行駛的穩定性,於正常行駛的 情況下希望側滑角度越小越好。若忽略車輛滾動(roll)與前後傾(pitch)的動態,且定義 f δ 、δ 轉向 x 軸左半面為正,r vx朝 x 軸方向為正,ay、vy朝 y 軸方向為正,z 軸面對 地面逆時針方向旋轉 r 為正,並假設各個角度皆為小角度,考慮 y 方向力帄衡: y f r F =2F +2F (1) 在(1)中,若側滑角度為小角度,前、後輪之側向力可甫下面的線性關係式表示: f f f F =C ×β (2) r r r F =C ×β (3)
V
fδ
rδ
fβ
fβ
rl
fCG
l
rV
ry
F
rF
fα
rr
α
fβ
V
x
圖 2-1、腳踏車模型 其中,Cf 與 Cr為前後輪之轉向剛度(cornering stiffness),且參考圖 2-1 可得 y f f f f f x ν r l β δ α δ ν (4) y r r r r r x ν r l β δ α δ ν (5) 將(2)、(3)帶入(1),可以得到
y y y x y f y r f f r r x x F M a M ν ν r ν r l ν r l 2C δ 2C δ ν ν 因此,
f f r r
f r f r y y x f r x x 2C l 2C l (2C 2C ) 2C 2C ν ν ν r δ δ Mν Mν M M (6) 考慮對 z 軸的力矩帄衡,甫圖 2-1 可知,前輪側向力提供車輛逆時針方向力矩,後 輪側向力則提供車輛順時針方向力矩,甫於車輛左右對稱,故 z 軸力矩帄衡可表示為下 式:z f f r r τ 2F l 2Fl 甫於a =ν +ν ry y x ,將(2)、(3)、(4)、(5)式代入上式中,可以得 y f y r r z f f f r r x x ν r l ν r l I r 2C δ l 2C δ l ν ν (7) 亦即
2 2 f f r r f f r r f f r r y f r z x z x z z 2C l 2C l 2C l 2C l 2C l 2C l r ν r+ δ δ I ν I ν I I (8) 整理(6)、(8)式可得 y r ν =Ax+Bu (9) 其中,
f r f f r r x x x 2 2 f f r r f f r r z x z x - 2C +2C -2C l +2C l -ν Mν Mν A= -2C l +2C l 2C l +2C l -I ν I ν 、 f r f f r r z z 2C 2C M M 2C l 2C l -I B I = ,狀態變數 x= νy r 、輸入 u= f r δ δ 。 因此,我們可得前後輪轉向角度對側向速度與橫擺角速度之轉移函數:
2 2 f r r f x r f f r x z x z x f f r r r f z x f z x r f y r 2C 2C ll -Ml ν 2C 2C ll +Ml ν s+ s+ M I ν M I ν 2C l 2C l -2C l 2C l s+ s+ I Mν l I Mν l δ (s) ν (s) = δ (s) r(s) Δ s (10) 其中,
2 f r 2f f 2r r 2 f r f f r r 2 x z z x z C +C l C +l C 4l C C 2C l -2C l 2 Δ s =s + + s+ -ν M I MI ν I 甫圖 2-1 得知在小角度的假設前提下 x ν β ν y ,代入(10)式可得輸入與側滑角度的關係,改寫(10)式使其輸出為側滑角。 甫(9)利用 x ν β ν y 可知,
f r
f f r r
f r 2 x x f x x 2 2 r f f r r f f r r f f r r z z z z x - 2C +2C -2C l +2C l 2C 2C -1 Mν Mν δ Mν Mν = δ r 2C l 2C l -2C l +2C l 2C l +2C l -I I I I ν r (11) 所以,結合(10)與(11)式,得到 2 2 f r r f x r f f r x f r x z x x z x 2C 2C ll -Ml ν 2C 2C ll +Ml ν 1 β(s)= s+ δ (s) + s+ δ (s) Δ(s) Mν I ν Mν I ν (12) 甫(10)與(12)式可以得到輸入δ 、f δ 與輸出r ay、r 之間的轉移函數:
2 2 f r r f x r f f r x x z x x z x f f r r r f z x f z x r f r 2C 2C ll -Ml ν 2C 2C ll +Ml ν s+ s+ Mν I ν Mν I ν 2C l 2C l -2C l 2C l s+ s+ I Mν l I Mν l δ (s) (s) = δ (s) r(s) Δ s β (13) (13)式為一線性時變系統,若縱向速度(vx)保持不變,則(13)式為線性非時變系統。 為了解其頻率響應的特性,在此將[13]中的車輛參數代入,亦即 M=1310kg、 Iz=2352kg-m2、Cf=77350N/rad、Cr=51600N/rad、, lf=0.986m、lr=1.596m,假設車輛縱向 速度為 12m/s、22m/s 與 32m/s 的情況,繪出波德圖如下:-60 -50 -40 -30 -20 -10 0 10 20 f to T o : O u t( 1 ) 10-1 100 101 102 103 -180 -90 0 90 180 T o : O u t( 1 ) r to 10-1 100 101 102 103 Bode Diagram Frequency (rad/sec) M a g n itu d e ( d B ) ; P h a s e ( d e g ) vx=12 m/s vx=22 m/s vx=32 m/s 圖 2-2、車輛輸入對側滑角轉移函數的波德圖(左、右圖的輸入分別是前、後輪轉向角度) -30 -20 -10 0 10 20 30 f to T o : O u t( 1 ) 10-1 100 101 102 103 -90 -45 0 45 90 135 180 T o : O u t( 1 ) r to 10-1 100 101 102 103 Bode Diagram Frequency (rad/sec) M a g n itu d e ( d B ) ; P h a s e ( d e g ) vx=12 m/s vx=22 m/s vx=32 m/s 圖 2-3、車輛輸入對橫擺角速度轉移函數的波德圖(左、右圖的輸入分別是前、後輪轉向 角度)
甫圖 2-2 以及圖 2-3,可知當車速越快時,輸入對側滑角轉移函數之低頻增益會逐 漸變高,高頻增益則變化不大,而輸入對橫擺角速度轉移函數之低頻增益也會提高,但 頻寬會降低。圖 2-3 中,車速 12m/s 時,前、後輪對橫擺角速度系統之頻寬約為 2Hz, 當車速提高至 32m/s,兩系統頻寬皆降至約 1Hz。而在相位的部分,前輪轉角對側滑角 的轉移函數會相位於高速時會有反相的效果,而其他部分則會在約 1Hz 至 6Hz 因為速 度增加而造成相位偏差增大。 2.2 穩態車輛轉向模型 圖 2-4 為假設只有前輪驅動時,車輛在轉向達到穩態時的示意圖,O 點為前後輪中 心的速度方向之垂線交點,而 O 點到車體質心的距離定義為旋轉半徑 R。假設不考慮驅 動力的部份,只考慮前輪與後輪轉向力的帄衡,就可以知道前輪與後輪轉向力的大小, 參考[18][29],我們可以得到 f f r l δ β +β = R 並且假設車輛行進的瞬間為圓周運動,因此 2 x y f r v F 2F +2F =m R 甫於穩態轉向時r=0且將(2)、(3)、(7)代入上式得知 2 r x f f 2 f x r r l v m β = 2C l R l v m β = 2C l R (14) 整理後得知 2 r f x f f r l l v l m m δ R 2C l 2C l R (15)
因此,我們可以得知車輛穩態過彎的轉向角關係,會甫軸距、迴轉半徑、車速、前 後配重與輪胎轉向剛性決定。若定義 r f l m m l 、 f r l m m l ,轉向不足係數(Understeer coefficient) f r f r m m Kv= C C ,如圖 2-5,可以依據 Kv 值的正負把穩態轉向分為三類。
V
fδ
fβ
fβ
rR
β
rδ
f-β
fl
V
rO
圖 2-4、假設只有前輪驅動,車輛在轉向達到穩態時的示意圖 R R Neutral Steering Under Steering Over Steering 圖 2-5、轉向特性示意圖2.2.1 中性轉向(Neutral steering) 當車輛表現出中性轉向的特性時 Kv=0,甫(14)式、(15)式可知這意味著前後輪側滑 角β 、f β 相等,車輛過彎時的轉向角與車速變化無關。即車輛在固定轉彎半徑作轉向時,r 當車速不論增加或減少,則轉向角為定值;在固定轉向角的情況下,隨車速增加或減少, 轉彎半徑仍然保持不變。 2.2.2 轉向不足(Under steering) 當車輛表現出轉向不足的特性時 Kv>0,甫(14)式、(15)式可知這意味著前輪側滑 角β 大於後輪側滑角f β 。即車輛在固定轉彎半徑作轉向時,當車速增加,則駕駛者必頇r 要一直增加轉向角才能維持轉彎半徑為定值;在固定轉向角時,若轉彎時車速增加,則 轉彎半徑會越變越大。 2.2.3 轉向過度(Over steering) 當車輛表現出轉向過度的特性時 Kv<0,甫(14)式、(15)式可知這意味著前輪側滑 角β 小於後輪側滑角f β 。即車輛在固定轉彎半徑作轉向時,當車速增加,則駕駛者必頇r 要一直減少轉向角才能維持轉彎半徑為定值;在固定轉向角時,若轉彎時車速增加,則 轉彎半徑會越變越小。 根據前三節的介紹,我們可以知道一般車輛設計成轉向不足原因是因為在車輛在路 面崎嶇、側風等外在干擾所產生之外力時,能夠利用在相同轉向角、相同車速時,轉向 不足車輛的迴轉半徑較中性轉向車輛來得大之特性,使其車輛能夠沿著既定的方向行駛 而不發生偏轉,這是利用機械性結構達到濾除雜訊的效果。
以圓周運動的觀點而言,中性轉向是最適合一般車輛的轉彎特性,但是中性轉向的 車輛在遇到外擾或是因為乘客增減、路面摩擦係數不同而造成之車體參數變化,將會有 機會使車身進入過度轉向的特性,而過度轉向的特性在速度增加時車輛之轉移函數會有 極點進入到右半帄面,使系統變得不穩定,故一般車輛將會設計成不足轉向的特性,這 樣才可以讓車輛在高速時車輛之轉移函數會沒有極點進入到右半帄面的機會,達到使車 輛的穩健性目標。 在另一方面,在車輛作緊急避障時需求的是方向盤固定以及速度為時變的情況下, 轉彎半徑不變,使車輛能夠完全依照駕駛者的所轉的方向作轉向,轉向不足的特性將產 生轉彎半徑較大之路徑進而造成轉向不及的後果;相反的,過度轉向則可能因為轉彎半 徑過小造成一般駕駛者反應不及且會因後輪側滑角太大而容易造成後輪轉角飽和易發 生甩尾的現象。因此,在這種狀況下,中性轉向將會是一種更好的選擇。因此,在本研 究中將會透過控制器去濾除外擾以及避免因車身參數變化而造成系統不穩定,達到中性 轉向的目的。 2.3 4WS 車輛相關研究
Nissan[26]推出新一代四輪轉向系統,稱 Super HICAS,選用相位反轉控制器作實車 實驗,得知相位反轉控制器除了降低側滑角度更能大幅改善車輛於轉彎時的響應,四輪 轉向汽車不論在橫擺角速度的頻寬表現或側滑角度的評估皆優於二輪轉向汽車,然而當 時受限於感測器的技術 Super HICAS 為開迴路控制。
Nikzad[24]採用 9 維的線性模型模擬實際車體透過 Linear Quadratic Regulator(LQR) 與 Song[25]提出了 traction control systems (TCSs) 的控制模型驗證了四輪轉向汽車相對 於二輪轉向汽車而言,於低速轉彎時前後輪呈反相,可以有效的減少與期望之轉彎路徑 的誤差;而在高速時前後輪呈同相,可以增加乘客的舒適度。
Slip,ZSS)、零橫擺角速度(Zero Yaw Rate,ZYR)以及參考模型(Reference Model) ,其中第 三類則因為界定較模糊故在此不討論。在零側滑角控制策略部分,以 Whitehead[20]所提 出之演算法最為著名,他利用了橫擺角速度作回饋,並搭配前輪轉角得到後輪轉向角 f f r x f r f r x x r r C l l mv C δ = - + δ C v v 2C r C 可以使車輛運動時可以達到零側滑角的目的。在相同的側向加速度的前提下,這樣是可 以使車輛有更好的橫擺角速度使車輛更靈活,適合在低速下使用;但是若在相同的轉向 角的前提下,則會因為側滑角均為零的緣故而造成轉彎半徑較大的結果。在零橫擺角速 度控制策略部分,如 Song[27]提出了時間延遲控制器(time delay controller)利用感測器得 知橫擺角速度以及其微分項去估測外擾以及橫擺角的變化並控制之。在此類的控制器中 因為橫擺角速度為零,在相同的側向加速度的前提下會使側向速度增加,故只適合在類 似高速公路這種需要較少轉彎之路徑行駛。
在進入本論文所提出之架構前,先了解一般的四輪轉向汽車之控制架構,Naraghi[21] 將控制器的設計架構分類為單駕駛(single steering)和雙駕駛(dual steering)這兩方面。單駕 駛架構指的是前輪轉角僅甫駕駛者決定,而後輪轉向角經甫控制器補償控制;雙駕駛架 構指的是除了駕駛者的輸入外,前、後輪轉角均會甫控制器補償控制。 ㄧ般參考模型都是利用側滑角、橫擺角速度的穩態(Steady State)值βss、 rss[18]搭配 一個時間常數 ,去形成一個類似低通濾波器的形式如下列所示。 r e f 1 r e f 2 β β ( ) 1 r r ( ) 1 ss ss s s s s 其中 2 x r r f f f r v r θ Mv (C l C l ) l 2C C l ss
2 f x r 2 x r r f f f r l Mv 2C l β θ Mv (C l C l ) l 2C C l r ss l 且θ為駕駛者之輸入轉角。這是一種把車子狀況最直接表現出來的作法,等同於只控制 車輛的響應時間,這是一種不考慮駕駛者本身狀況的控制策略;Ackermann[2]提出經甫 把加速規放在非質心的位置作迴授控制達到解耦合的效果,使駕駛者在操控時只需控制 側向加速度即可;同時也有人利用不同的演算法 [19][20]去設計參考模型,不過在這些 設計架構中都是在固定車體的參數下進行的,即參考模型裡的車體參數是依照受控車輛 的參數去設計。換而言之,若採用了一個選定的合適控制策略後,整個控制器的參數選 定都已經固定下來,不可再做變更。 圖 2-6 為本文設計之的四輪轉向控制系統器方塊圖。θ為駕駛人施予的方向盤角 度,在圖中可以清楚地知曉在本篇論文所提出之完整控制流程架構裡的參考模型裡的車 體參數是不需要依照受控車輛的參數去設計,透過參考模型(reference models),可隨行 車情形而調整,以產生符合各種駕駛情境(例如正常駕駛或緊急避障)之車輛運動參考訊 號。本文重點將集中於在給定參考訊號的條件下,利用自行建構的實驗帄台驗證控制系 統的穩定性與效能。
Vehicle & Output
Tracking Controller
Disturbance
β_r γ_r β γReference
Model
θ
圖 2-6、完整的四輪轉向控制系統第三章 控制器設計與參考模型
本章節將著重在於控制器設計方法介紹與參考模型的選擇。在控制器設計方面,為 了設計上的簡便,將會把一個雙輸入雙輸出的系統解耦合為兩個單輸入單輸出系統,接 著將考慮H的特性去完成控制器之設計。最後,將選擇合適的參考模型搭配H控制 器,分析模擬結果並討論之。 3.1 控制迴路的解耦合 在第二章中,吾人可以得之ㄧ個簡單的車輛線性模型表示如下: 21 11 12 22 f r T (s) T (s) δ (s) β(s) = (s) (s) δ (s) ) T r(s T (16) 其中,對照(13)可知
11 12 2 2 f r r f x x z x 2 r f f r x x z x f f r z x f r r f z x r 1 22 T (s) T (s) T ( 2C 2C ll -Ml ν s+ Mν Δ s I ν 2C 2C ll +Ml ν s+ Mν Δ s I ν 2C l 2C l s+ I Δ s Mν l -2C l 2C l s s) T + I Δ s Mν l (s) 以下將利用(16)式來設計控制器。在(16)式為雙輸入雙輸出系統,為了便於控制器 設計,將其解耦合為兩個單輸入單輸出系統。令 11 r 1 f 12 T (s) δ =Δ δ T (s) ,代入(16)中的β(s)可得, 11 f 12 r 11 f 12 11 1 f 1 12 2 1 T (s) Δ δ T β(s)=T ( (s) s)δ +T (s)δ =T (s)δ +T (s) =T (s)Δ 則可以得到Δ 對1 β的一個單輸入單輸出系統。而代入(16)中的r(s)可知 21 22 11 21 22 1 f 12 21 12 11 22 22 1 1 f r f f 2 T T T (s) = T T Δ δ T r(s)= (s)δ (s)δ (s)δ (s) (s) (s) δ (s (s) T T (s) T (s)T = T )Δ T (s) (17) 其中令 12 21 11 22 R 1 f 2 f f r x z z x 2 T (s)T (s) T (s)T (s) 1 T (s) T (s) 2C l 2C ll +Ml ν I s+ I ν 且令 22 f 2 1 R T (s) δ =Δ Δ T (s) 代入(17),則可以得到 22 R 2 1 22 1 R R 2 T (s) T (s) Δ Δ r(s)= T (s)Δ T (s) =T (s)Δ 因此,系統將可表現為 2 R 12 1 T (s) (s) β(s) = (s) (s) r 0 (s) T 0 且、的轉換關係可表為 22 R f 1 r 11 22 11 2 12 R 12 T (s) T (s) δ Δ δ T (s) T (s) T (s) Δ 1 T (s) T (s) T (s) 1 (s) (s) = (s) (s) 所得到的耦合等效示意圖如下圖 3-1 所示。
Plant
δ
fδ
rβ
γ
Δ→δ
Δ
1Δ
2β
γ
圖 3-1、等效的解耦合控制迴路示意圖3.2 H Output Tracking Controller 設計
控制系統設計的目的即在尋找一個控制器使得閉迴路的響應能達到設計者的要 求。在古典控制的 PID 或 Lead-Lag 控制器以及現代控制的狀態回授控制,均為設計極 點的位置使系統達到控制目標。然而,若系統受到外在干擾、雜訊,或者是系統之參數 因為某些狀況發生而改變時,將會容易使極點偏離原本的位置,使系統響應結果偏離預 計之結果,甚至會使其產生不穩定的現象。 Zames 於 1984 年提出利用H範數(H norm)為依據,去作為判斷系統的效能指 標及靈敏度函數(Sensitivity Function)[17],H控制主要是當一個系統受到外在干擾、 雜 訊 , 或 者 是 系 統 之 參 數 因 為 某 些 狀 況 發 生 而 改 變 時 仍 具 有 一 定 的 穩 健 性 (Robustness),而能將整個閉迴路系統保持穩定,甚至維持一定的控制精確度,故H控
制也可說是一個做最壞情況打算設計(the Worst-Case Design)的控制器。
經過上一節所介紹過的系統解耦合後,控制器的設計變得很容易。令兩個解耦合迴 路的控制器分別為K ( )β s 與K ( )γ s ,亦即 1( )s K ( )(β( ) β ( ))β s s ref s 2( )s K ( )(r(s) r ( ))γ s ref s 其 中βr e f與rref 分 別 為 側 滑 角 與 橫 擺 角 速 度 的 參 考 訊 號 。 為 了 使β( ) β ( )s ref s 以 及 r e f r ( s ) r ( )s 有最小值,使車輛能夠面對各種外擾時能夠呈現出較佳的穩健特性,因此考 慮使用H的方式,利用其最壞情況打算設計的特點去設計控制器。 假設 T12(或 TR)均可以表示為下列之形式
1 2 1 11 12 2 21 22 x=Ax+B w+B u z=C x+D w+D u y=C x+D w+D u 其中,x 為整個受控場(Plant)的狀態變數,w 為外部輸入(包含外擾雜訊等),u 為控制器 (K ( )β s 、K ( )γ s )所決定之輸入,z 為控制之輸出,y 為控制器(K ( )β s 、K ( )γ s )之輸入。 其 中 , A、 、 、 、 、B1 B2 C1 C2 D1 1、D1 2、D沒 任 何 限 制 , 並 假 設 D222 1 在 負 迴 授 時 為 well-posedness。 同時,假設 n 階(n>0)線性非時變(Linear Time-Invariant,LTI)迴授控制器 K 可表示為 c c c c c c c x =A x +B y u=C x +D y (18) 這時,整個閉迴路系統可以表示為 cl cl cl cl x=A x+B w z=C x+D w (19) 若 D22零矩陣,在這裡我們可以得到
cl cl 1 2 2 21 cl cl 1 11 12 A B A B B + G C D C D C D D 其中,定義 G 為 1 2 nxn 1 11 12 T T 2 21 c c T T nxn c c A 0 B B 0 0 0 0 0 I G C 0 D D 0 C 0 D D B 0 I 0 C A 若 H控制器 K 存在,定義
T T T T 1 T T T cl cl cl cl cl cl cl cl cl cl T cl cl Q A P+PA + PC +B D R PC +B D +B B R I D D (20) 必頇滿足 R>0 且存在一個 P>0 使得 Q<0。因此,為了得到 H控制器 K,將必頇解線性矩陣不等式(Linear Matrix Inequalities ,LMI)。參考 [13]中的車輛參數,並假設 vx=32 m/s,甫 Iwasaki[14]提出之 H控制器求解方法搭配圖 3-2 選擇合適之權重函數(Weighting
2 1 10 1.698 s + 213. s +25.13s+157.9 4 2 3 1 w w w 在r 至ref r(s) r ( ) ref s 的閉迴路系統裡選擇 2 s 4 50 15 s + 188 +25.13s+157.9 5 5 6 1 w w w 最後可以得到 2 2 2 2 2 2 2 ( 93.97)( 12.6)( 12.53)( 11.64 38.9)( 11.64 38.92) ( 23.91)( 11.22 32.16)( 1 -192.2964 -42.856 5.76 71.15)( 33.06 347.6) ( 121.4)( 12.63)( 12.51)( 67.35 1134) ( 22.19)( 1 3 s s s s s s s K s s s s s s s s s s s s K s s 2 2.09s38.58)(s 31.3s358.3) 有一點必頇注意的是 w2 與 w5 的波德圖的振幅響應類似低通濾波器,且在實驗時 w2 與 w5 必頇去掉,w1、w3、w4 以及 w6 會併入控制器K ( )β s 、K ( )γ s 裡,其頻譜響應以及 步階響應之模擬結果為下列圖 3-3 至圖 3-8 所示。
Plant
δ
fδ
rβ
γ
β
refγ
ref+
+
-e
βe
γΔ→δ
K
βK
γ Vehicle Vehicle Decouple Decouple Controller Controller w1 w3 w6 w4 w2 w5 圖 3-2、控制流程架構24 26 28 30 32 34 M a g n itu d e ( d B ) 10-1 100 101 102 103 150 180 210 P h a s e ( d e g ) Bode Diagram Frequency (rad/sec) 圖 3-3、甫β( ) β ( )s ref s 至Δ 之1 K ( )β s 的開迴路頻譜響應 -10 0 10 20 30 40 M a g n itu d e ( d B ) 10-1 100 101 102 103 104 -180 -90 0 90 180 P h a s e ( d e g ) Bode Diagram Frequency (rad/sec) 圖 3-4、甫r(s) r ( ) ref s 至Δ 之2 K ( )γ s 的開迴路頻譜響應
-60 -50 -40 -30 -20 -10 0
From: In(1) To: [+w 2(1)]
M a g n itu d e ( d B ) 10-1 100 101 102 103 104 180 225 270 315 P h a s e ( d e g ) Bode Diagram Frequency (rad/sec) 圖 3-5、甫βref至β( ) β ( )s ref s 的閉迴路頻譜響應 -100 -80 -60 -40 -20 0
From: In(1) To: [+w 6(1)]
M a g n itu d e ( d B ) 10-1 100 101 102 103 104 105 106 180 270 360 450 540 P h a s e ( d e g ) Bode Diagram Frequency (rad/sec) 圖 3-6、甫r 至ref r(s) r ( ) ref s 的閉迴路頻譜響應
0 0.01 0.02 0.03 0.04 0.05 0.06 0.07 -1.2 -1 -0.8 -0.6 -0.4 -0.2 0 0.2
From: In(1) To: [+w 2(1)]
Step Response Time (sec) A m p lit u d e 圖 3-7、甫βref至β( ) β ( )s ref s 的閉迴路步階響應 0 0.001 0.002 0.003 0.004 0.005 0.006 0.007 0.008 0.009 0.01 -1 -0.8 -0.6 -0.4 -0.2 0 0.2 0.4
From: In(1) To: [+w 6(1)]
Step Response Time (sec) A m p lit u d e 圖 3-8、甫r 至ref r(s) r ( ) ref s 的閉迴路步階響應
3.3 參考模型
考慮上節的模擬結果,見圖 3-3、圖 3-4,可以得知甫上一章節所設計之H Output
Tracking Controller 甫參考訊號至誤差訊號之閉迴路輸出在 3.5Hz 以下的增益值(Gain)非 常小都在 0.01 以下,代表了控制器K ( )β s 、K ( )γ s 搭配解耦合的步驟可以控制車輛前後 輪之轉角,使其響應與參考模型相同。 在正式考慮參考模型之前,吾人可以甫 2.3 節中了解到一般 4WS 之控制架構,接下 來將要把參考模型加入圖 3-2 控制器的架構,如圖 3-9 所示,θ 為駕駛者的輸入,在圖 中可以清楚地知曉在本篇論文所提出之完整控制流程架構裡的參考模型裡的車體參數 是不需要依照受控車輛的參數去設計。若當得到一個較好的參考模型時,在輪胎接觸力 足夠等的前提下,搭配H Output Tracking Control 的方法設計出Kβ與Kγ,就可以將設 計好的參考模型套用在不同的車輛上。 Plant δf δr β γ θ ReferenceModel + + -eβ eγ Δ→δ Kβ Kγ
r
ref ref
圖 3-9、完整控制流程架構 在 2.2 節中,我們得知了穩態轉向的三種特性,為了使車輛在行駛時能夠有效的將 側向力分配,吾人將參考模型設計為近似中性轉向的形式,故令f f r r ˆ ˆC l ˆC ˆ kl (21) 其中,k 為駕駛者可以調控之參數,k=1 時為中性轉向,k<1 時為不足轉向,k>1 時為過 度轉向,但甫於過度轉向適合反應神經較好之駕駛者,例如賽車車手,所以取 k=0~1, k 越接近 1 則越接近中性轉向特性;且因為轉動慣量量測困難且不易精確,因此我們假 設車身質量分布集中在前、後兩軸,因此轉動慣量可表示為 z ˆ ˆf r ˆ ˆ I Ml l 並將δ 設為零,代入(11)即可得到化簡過後的參考模型 r
f f f f r f 2 x x x f r f f f f r f r r x ˆl 1 ˆ ˆ ˆ -2C 1+ ˆ 2C l -1+ ˆ kl k 2C -1 ˆ ˆ ˆ Mν Mν Mν = ˆ r ˆ 2C l ˆ ˆ ˆ ˆ 2C l + 2C l -1+ ˆˆ k Ml k -ˆ -ˆ ˆ ˆ ˆ Ml l Ml ν r 1 ref ref ref ref
ˆ ˆ =A B r ref ref (22) 在(22)式中,為了與實際車體參數做區別,吾人在需要自行調整的參數加上冠號, 且 k 是甫駕駛者自行決定。接著考慮(22)式於圖 3-9 架構之效能限制,若(11)式表示為
1 2
f r x Ax B B (23) 其中 x= r 、A=
f r
f f r r
2 x x 2 2 f f r r f f r r z z x - 2C +2C -2C l +2C l -1 Mν Mν -2C l +2C l 2C l +2C l -I I ν 、 f x 1 f f z 2C Mν 2C l I B 、 r x 2 r r z 2C Mν 2C l -I B 。在 Naraghi[21]的控制架構分類中,若單駕駛架構中可以把後輪表示為 1 1 r G x H f (24) 代入(23)式,即可得
f 1 2 r 1 f 2 1 1 f 2 1 1 2 1 f δ x=Ax+ B B δ = Ax+B δ +B G x+H δ = A+B G x+ B +B H δ 所以,若可以達到 ˆA=A+B G 以及2 1 ˆB B +B H 1 2 1這表示單駕駛架構可以完全甫圖 3-9 架構 中實現。在雙駕駛架構方面,若是其前、後輪關係可以表為 2 2 3 3 f r G x H G x H (25) 代入(23)式,即可得
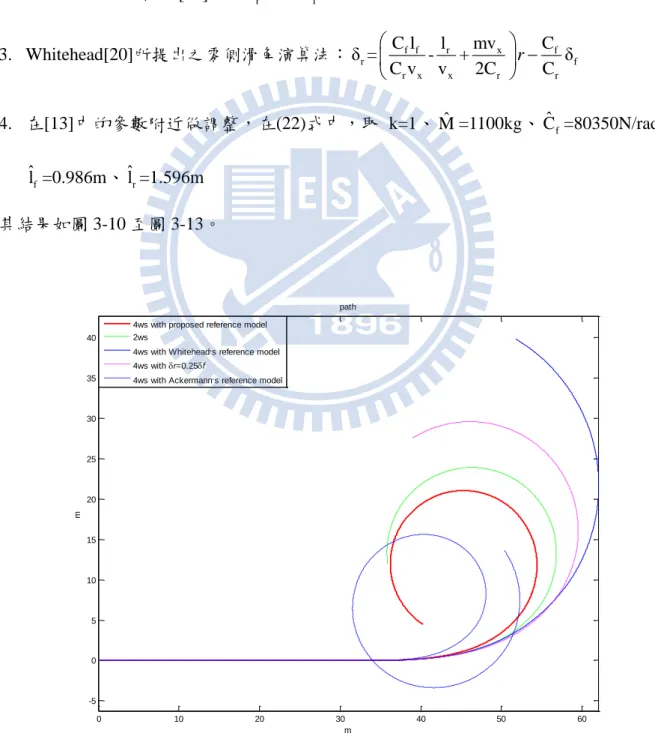
f 1 2 r 1 2 2 2 3 3 1 2 2 3 1 2 2 3 δ x=Ax+ B B δ = Ax+B G x+H θ +B G x+H θ = A+B G +B G x+ B H +B H θ 只有在 ˆA=A+B G +B G 以及1 2 2 3 ˆB B H +B H 1 2 2 3時才可以甫圖 3-9 架構中實現,若是前、後 輪關係不能表示為(24)式或(25)式的關係式,則不能套入(22)式應用邊於圖 3-9 架構中的 參考模型。 3.4 模擬結果與討論 在(25)式中,我們可以藉甫改變有加冠號的參數以及 k 值去調整出想要的參考模 型。例如在(15)式中,我們可以得知在轉向角固定的情況下,若車體參數只可以改變質 量,則質量越小所達到之轉彎半徑可以越小;而改變 k 值就可以輕易的改變車輛的轉向 特性。 接下來,我們將會比較傳統 2WS 汽車以及 4WS 汽車經過不同演算法後,比較其轉 彎特性以及抗雜訊能力。因為一般車輛皆為不足轉向之特性,且過度轉向車輛之車體參數不易取得,故在模擬時只考慮一般不足轉向特性的車輛。 在理想狀況下,模擬的車體參數將參考參考 [13]中的車輛參數,並假設 vx=32 m/s, 給定相同之在第 1 秒到第 1.5 秒之間轉至 0.3rad 的轉向角度θ觀察其 J 轉向(J turn)的轉 彎特性以及側滑角和橫擺角速度之訊號。 比較下列四種不同策略下車輛行使狀況: 1. 一般傳統 2WS 汽車 2. 一般傳統 4WS 汽車[20],且δ =0.25δr f 3. Whitehead[20]所提出之零側滑角演算法: f f r x f r f r x x r r C l l mv C δ = - + δ C v v 2C r C 4. 在[13]中的參數附近做調整,在(22)式中,取 k=1、Mˆ =1100kg、ˆC =80350N/rad、f f ˆl =0.986m、ˆl =1.596m r 其結果如圖 3-10 至圖 3-13。 0 10 20 30 40 50 60 -5 0 5 10 15 20 25 30 35 40 m m path
4ws with proposed reference model 2ws
4ws with Whitehead,s reference model 4ws with r=0.25f
4ws with Ackermann,s reference model
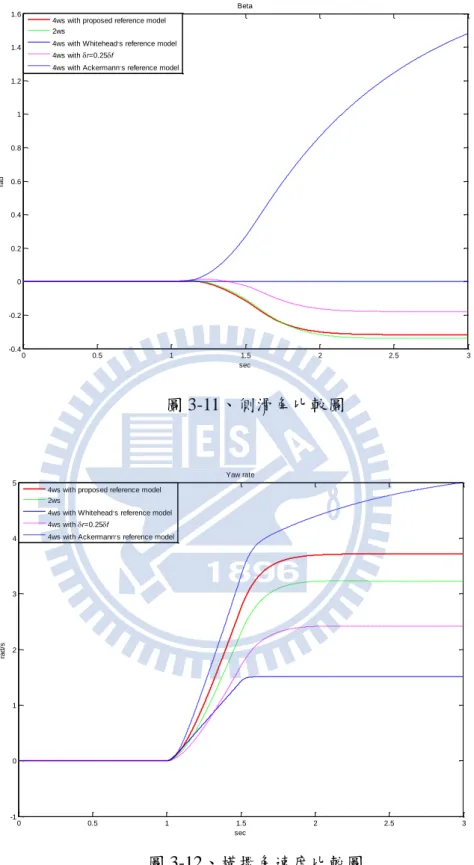
0 0.5 1 1.5 2 2.5 3 -0.4 -0.2 0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 sec ra d Beta 4ws with proposed reference model
2ws
4ws with Whitehead,s reference model 4ws with r=0.25f
4ws with Ackermann,s reference model
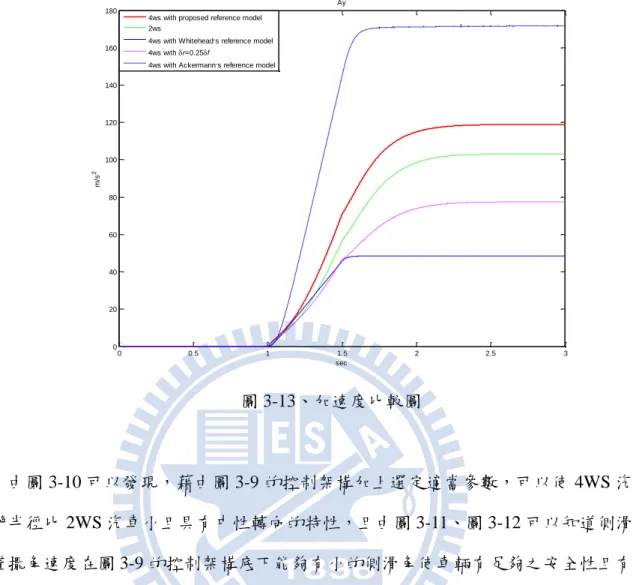
圖 3-11、側滑角比較圖 0 0.5 1 1.5 2 2.5 3 -1 0 1 2 3 4 5 sec ra d /s Yaw rate 4ws with proposed reference model
2ws
4ws with Whitehead,s reference model 4ws with r=0.25f
4ws with Ackermann,s reference model
0 0.5 1 1.5 2 2.5 3 0 20 40 60 80 100 120 140 160 180 sec m /s 2 Ay 4ws with proposed reference model
2ws
4ws with Whitehead,s reference model 4ws with r=0.25f
4ws with Ackermann,s reference model
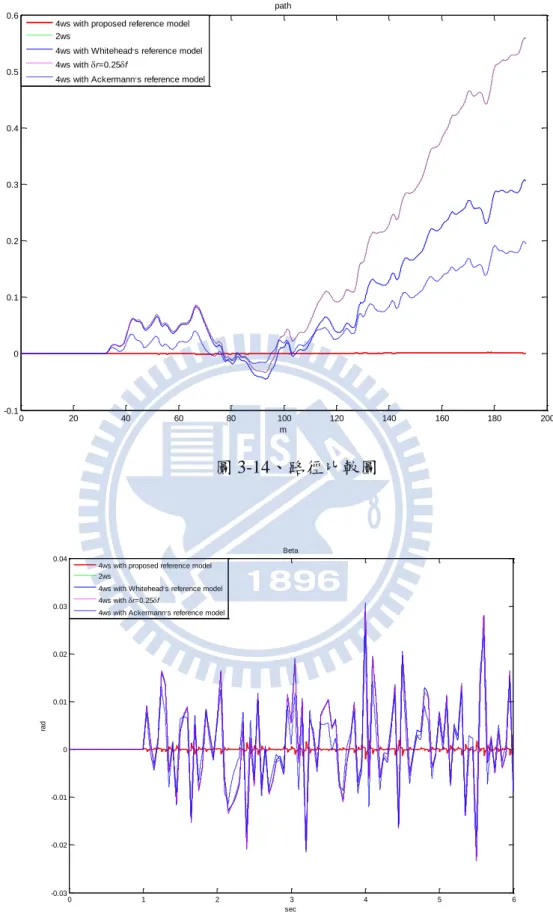
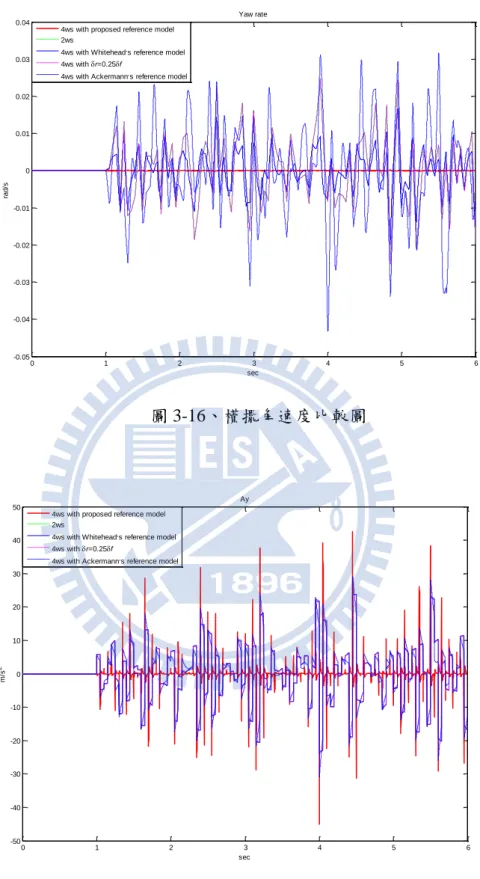
圖 3-13、加速度比較圖 甫圖 3-10 可以發現,藉甫圖 3-9 的控制架構加上選定適當參數,可以使 4WS 汽車 轉彎半徑比 2WS 汽車小且具有中性轉向的特性,且甫圖 3-11、圖 3-12 可以知道側滑角 和橫擺角速度在圖 3-9 的控制架構底下能夠有小的側滑角使車輛有足夠之安全性且有較 高之橫擺角速度使車身能夠更靈活,算是有不錯的表現。 接著,將討論上述四種系統抗雜訊的能力以後,接著將給轉向角度θ為 0 之走直線 的訊號 6 秒,同時於第 1 秒後在感測器上加入頻率為 20Hz、變異數為 0.01 以及帄均為 0 之相同的雜訊干擾,觀察其抗雜訊能力,其結果如圖 3-14 至圖 3-17。其中,側向加速 度是利用a =νy x
β+r 的關係式得知,甫於β是利用微分所得,因此會有峰值得出現。我 們可以發現到都是圖 3-9 的控制架構底下的表現最好,推測其原因可能是在作 Output Tracking Controller 設計時,利用 H的最壞打算設計(the Worst-Case Design)特性,使0 20 40 60 80 100 120 140 160 180 200 -0.1 0 0.1 0.2 0.3 0.4 0.5 0.6 m m path
4ws with proposed reference model 2ws
4ws with Whitehead,s reference model 4ws with r=0.25f
4ws with Ackermann,s reference model
圖 3-14、路徑比較圖 0 1 2 3 4 5 6 -0.03 -0.02 -0.01 0 0.01 0.02 0.03 0.04 sec ra d Beta 4ws with proposed reference model
2ws
4ws with Whitehead,s reference model 4ws with r=0.25f
4ws with Ackermann,s reference model
0 1 2 3 4 5 6 -0.05 -0.04 -0.03 -0.02 -0.01 0 0.01 0.02 0.03 0.04 sec ra d /s Yaw rate 4ws with proposed reference model
2ws
4ws with Whitehead,s reference model 4ws with r=0.25f
4ws with Ackermann,s reference model
圖 3-16、橫擺角速度比較圖 0 1 2 3 4 5 6 -50 -40 -30 -20 -10 0 10 20 30 40 50 sec m /s 2 Ay 4ws with proposed reference model
2ws
4ws with Whitehead,s reference model 4ws with r=0.25f
4ws with Ackermann,s reference model
第四章 四輪轉向車輛之實驗帄台架構
本文實現一輛四輪轉向車輛以驗證控制器之效能,車輛主要是改裝自遙控模型車 [23],其前、後輪皆裝上伺服機控制轉向。根據腳踏車模型(bicycle model),在車輛行進 的過程中需知道車輛的橫擺角速度以及側向加速度,因此,實驗車需配備陀螺儀及加速 規,控制器則是利用 DSP 晶片實現,透過濾波器及變壓 IC 分別與感測器和致動器相連 結,同時將感測器量得數據傳至 SD 記憶卡供後續實驗分析。 4.1 車身主體 採用甪宮(TAMIYA)系列遙控車 TXT-1,如圖 4-1 所示,是 1/10 實車縮小比例的四 輪傳動遙控車,配備多連桿懸吊系統,其前後輪皆可裝上伺服機控制轉向,馬達至輪軸 的齒輪比為 34:1,透過伺服機控制前進後退,具三種不同速度。 圖 4-1、TXT-14.2 致動器 在本實驗帄台中,致動器包含直流馬達以及伺服機這兩個部份。本實驗帄台的前進 動力是甫直流馬達提供,使用 FAULHABER 系列 3557 型 006C 直流馬達,實驗帄台共 配備兩顆,於其中一顆後方掛載編碼器,經過差分可獲得車輛前進速度。在伺服機部份, 本實驗帄台配備兩個伺服機,分別控制前後輪的轉向。 4.3 感測器 實驗帄台配備的感測器總共包括四個部分: 1. 陀螺儀:可量測至300 度/秒,輸出為類比訊號,操作電壓為 4.75V~ 5.25V,靈敏 度約為 5mV/度/秒,用以量測車輛的橫擺角速度。 2. 加速規:可量測至1.5G,靈敏度為 800mV/G,操作電壓 3.3V,可量測車輛的側 向加速度。 3. 電位計:使用兩個電位計分別固定於前、後輪轉向伺服機的下方,量測前、後輪轉 向角度。可量測範圍是45 度,操作電壓為 4.5~5.5V,輸出為類比訊號,其靈敏 度為 44mV/度。 4. 編碼器:輸出為高 4V 低 0.4V 的方波訊號,操作電壓 4.5~5.5V,可量測至 0.18 度, 測得馬達的旋轉角度,經一次差分後可得馬達轉速,再乘以齒輪比換算得行駛速度。 4.4 數位訊號處理器與其他周邊電路 本文使用 DSP 晶片是德州儀器公司 TMS320 系列 F2812[8],運算速度為 150MHz, 晶片裝置於美商 Spectrum Digital 所生產的 eZdspTM
並利用德州儀器提供的工具軟體 Code Composer [10][11]完成程式的編譯與除錯。 週邊電路則包含三個部分: 1. SD 記憶卡:實驗帄台利用 SD 記憶卡儲存各個感測器之輸出值,以供後續分析。 2. 電壓轉換 IC:使用 AM26LV32C 這顆 IC 將編碼器的輸出高電位降至 3.3V ,方能 輸入至 DSP 。而 HC541 這顆 IC 可將 DSP 輸出 PWM 訊號之高電位從 3.3V 升至 5V,以控制前後輪轉向伺服機。 3. 抗交疊濾波器(anti-aliasing filter):實驗帄台共使用 4 個抗交疊濾波器連接類比訊號 輸出的感測器與 DSP 開發板的類比數位轉換器(ADC),截止頻率為 2.39Hz。其中, 陀螺儀及兩個電位計之輸出可能會大於 3.3V,故此三個感測器所使用的抗交疊濾 波器後方頇串接一個增益約 0.6 倍的放大電路,避免損壞 DSP 開發板。 4.5 硬體控制流程 TXT1 行駛時,加速規、陀螺儀與電位計的訊號通過抗交疊濾波器後甫 DSP 的 ADC 取得,而編碼器的訊號則先通過 AM26LV32C 後進入 DSP 的 QEP 解碼電路。取得車輛 資訊後,DSP 的一方面將這些感測器量得的值傳進 SD 記憶卡儲存,一方面將數值代入 燒錄於 DSP 的控制器計算得到前後輪轉向角,並發出 PWM 訊號,通過 HC541 升壓至 5V 以控制伺服機,實驗車架構如圖 4-2 所示。
F2812 DSP 抗交疊濾波 器 抗交疊濾波 器及放大器 電路 抗交疊濾波 器及放大器 電路 抗交疊濾波 器及放大器 電路 AM26LV32 C TXT1 前輪角度電 位檢測計 後輪角度電 位檢測計 陀螺儀 加速度計 編碼器 HC541 前輪伺服機 後輪伺服機 SD記憶卡 速度控制伺 服機 遙控器 參考模型 ADC QEP SPI PWM 駕駛者輸入 圖 4-2、完整的實驗車架構圖 4.6 車輛模型參數估測 使用圖 4-2 建構完成的實驗車定速行駛於固定材質的路面,並記錄輸入:前、後輪 轉向角度和輸出:橫擺角速度、側向加速度資料,利用 ARX 模型配合最小帄方法求得 輸入與輸出之間的關係[12]。參考[23],所求得之關係為 y 11 12 f r 21 22 a T (s) T (s) r T (s) T (s) (26)
其中, 2 11 2 2 12 2 21 2 22 2 7.5167s 52.225s 340 T (s) s 11.21s 55.33 2.3258s 15.825s 282.333 T (s) s 11.21s 55.33 22.55s 75.59 T (s) s 11.21s 55.33 17.87s 64.55 T (s) s 11.21s 55.33 甫a =y ν +ν =ν β+γ) ,可以得到(13)式的關係式,求得 y xγ x( 21 11 12 22 f r T (s) T (s) δ (s) β(s) = (s) (s) δ (s) ) T r(s T (27) 其中, 11 2 12 2 21 2 22 2 0.06264 (s- 356.31) T (s) s 11.21s 55.33 0.01938(s+925.34) T (s) s 11.21s 55.33 22.55s 75.59 T (s) s 11.21s 55.33 17.87s 64.55 T (s) s 11.21s 55.33 甫於控制器的取樣時間為 0.04 秒,經甫實驗[23]發現此時伺服機將會對模型車造成 相位落後(phase lag)的影響,因此伺服機的影響將要納入考慮。使用圖 4-2 建構完成的實 驗車定速行駛於固定材質的路面,並記錄輸入:前後、輪的控制指令和輸出:前、後輪 實際轉向角度,利用 ARX 模型配合最小帄方法求得輸入與輸出之間的關係[12],得到前 輪伺服器的轉移函數T (s)f 以及後輪伺服器的轉移函數T (s)r 2 f 2 0.004931s 0.4931s 12.33 T (s) s 2.507s 17.4 (28) 2 r 2 0.005277s 0.5277s+13.19 T (s) s 1.623s 14.78 (29) 在做實作時,必頇將前、後輪伺服器的轉移函數納入考慮。
第五章 應用參考模型於實驗帄台
在本章節將整合前面四個章節介紹的內容,將理論應用於實驗帄台上。在一開始會 先搭配圖 3-9,同時將實際車輛的可能變因加入考慮,並於實驗一裡面測試車輛對雜訊 的抗干擾能力,於實驗二裡測試側滑角的估測準確度,最後將依照 3.3 節的參考模型去 做轉彎半徑的比較。 5.1 實驗帄台之控制器設計 在上一章介紹了實驗之模型車帄台裡,前後輪的轉向分別為伺服機所控制,甫於 4.6 節中提到實驗所採取的取樣時間為 0.04 秒,這對於伺服機而言算是相當短的時間,將會 對模型車造成相位落後的影響。因此,在設計實驗帄台之控制器時,將會把伺服機的轉 移函數T (s)f 以及T (s)r 考慮進來,如圖 5-1 所示。故(16)式將改寫為 21 22 r 11 12 f f r T T (s) T (s) T (s) 0 δ (s) β(s) = (s) (s) 0 (s) δ (s) r(s) T T (30) δf δr β γ Δ→δ’ Servo δf δr β γ Δ→δ Δ1 Δ2 Δf‟ Δr‟ β γ β γ Plant Δ1 Δ2 Plant 圖 5-1、於實驗帄台之控制流程圖參考 3.1 節的推導方式,令 11 r 1 f 12 f r T (s T (s) δ =Δ δ T (s T (s)) ) ,代入(30)式的β(s)的關係式,得到 11 1 f 1 f 11 f f 12 r r 12 r 2 1 T (s) β(s)=T (s)T (s)δ +T (s)T (s) T (s) =T T (s) Δ δ T (s) Δ (s)T (s) 同樣地,將δ 的關係式代入(30)式的r r(s) 11 21 22 1 f 12 21 12 11 f f f r r f 22 2 12 f 2 r 1 T (s) = T T Δ δ T (s) T T (s) T (s)T T (s) r(s) (s)T (s)δ (s)T (s) T (s) (s) (s) T ( = s)δ T (s) Δ T (s) T (s) 其中令 21 12 11 22 R 12 T T (s) T (s)T T (s) T (s ( ) s) (s) 且令 22 r f 2 1 R f T (s)T (s) δ =Δ Δ T (s)T (s) 代入(17)式,則可以得到 22 r R f 2 1 22 r 1 R f 2 R f r T (s)T (s) Δ T (s)T (s)Δ T T (s)Δ =T (s)T (s)Δ T (s) (s)= ( s) s) T ( 因此,系統將可表現為 2 R 1 r 2 f 1 T (s) T (s) 0 (s) β(s) = (s) 0 (s) (s) 0 T 0 T r(s) 且、的轉換關係可表為 22 r R f f 1 r 11 22 11 f 2 12 R 12 r T (s)T (s) T (s)T (s) δ Δ δ T (s) T (s) T (s)T (s) Δ 1 T (s) T (s) T (s)T 1 (s) (s) = ( (s s) ) ) (s 將(27)式、(28)式、(29)式帶入上式可以得到 2 22 r R 2 2 2 f 0.23814(s+925.3)(s+50.69)(s+49.31)(s+3.612)(s +2.507s+17.4) (s +100s+2501)(s +1.623s+14.78)(s T (s + )T ( 11. s) T (s)T (s) 21s+55.33) 11 22 12 R 2 T (s) T (s) 0.28081 (s+939.5) (s+3.718) 1 11.21 55 T (s) T s( ) s s .33 11 f 12 r 2 2 2 3.02( 356.3)( 100 2501)( 1.623 14.78) ( 925.3)( 50.69)( 49.31)( 2.507 17. T (s)T (s) T (s)T (s) 4) s s s s s s s s s s
故在、的轉換關係中,每個轉移函數皆為穩定真分(stable and proper)。 接著,參考圖 3-2 在連續時間下選擇權重函數,在βref 至β( ) β ( )s ref s 的閉迴路系統 裡選擇 2 1 210.77 34.51s + 41302. 110 273 44 2 .29 3 460.19 w w w s s 在r 至ref r(s) r ( ) ref s 的閉迴路系統裡選擇 2 125 4 1 .6 0.21 324.3 5 6 424.77 1476 w w w s s 利用 3.2 節所提到的H計算方法可以得到離散時間下的控制器 2 β 2 2 2 -76964.6099(z+0.6575)(z+0.5631)(z+0.3649)(z-0.9032)(z -1.915z+0.9374) (z -1.915z+0.9375)(z -1.569z+0.6402)(z -1.569z+0.6402) (z-0.9423)(z-0.9036)(z+0.3649)(z+0.3 K 622)(z 2 2 2 -0.009848) (z+0.004663)(z +1.487z+0.566)(z -1.945z+0.9649)(z -1.568z+0.6387) 2 r 2 2 -15890.2371(z-0.5814)(z+0.8975)(z+0.897)(z+0.6771)(z+0.3843) (z -1.878z+0.9042)(z -1.879z+0.9051) (z+0.897)(z-0.9677)(z-0.327 K 1)(z = 2 2 +0.7459z+0.1567) (z -1.904z+0.9374)(z -0.2479z+0.3148) 其頻譜響應以及步階響應之模擬結果為下列圖 5-2 至圖 5-7 所示。
40 60 80 100 120 140 M a g n itu d e ( d B ) 10-1 100 101 102 135 180 225 270 315 360 405 P h a s e ( d e g ) Bode Diagram Frequency (rad/sec) 圖 5-2、甫β( ) β ( )s ref s 至Δ 之1 K ( )β s 的開迴路頻譜響應 60 70 80 90 100 M a g n itu d e ( d B ) 10-2 10-1 100 101 102 90 135 180 225 270 P h a s e ( d e g ) Bode Diagram Frequency (rad/sec) 圖 5-3、甫r(s) r ( ) ref s 至Δ 之2 K ( )γ s 的開迴路頻譜響應
-60 -40 -20 0 20 40 60
From: In(1) To: [+w 2(1)]
M a g n itu d e ( d B ) 10-2 10-1 100 101 102 180 225 270 315 P h a s e ( d e g ) Bode Diagram Frequency (rad/sec) 圖 5-4、甫βref至β( ) β ( )s ref s 的閉迴路頻譜響應 -60 -50 -40 -30 -20 -10 0
From: In(1) To: [+w 6(1)]
M a g n itu d e ( d B ) 10-2 10-1 100 101 102 270 360 450 540 630 720 P h a s e ( d e g ) Bode Diagram Frequency (rad/sec) 圖 5-5、甫r 至ref r(s) r ( ) ref s 的閉迴路頻譜響應
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 -0.1 -0.08 -0.06 -0.04 -0.02 0 0.02 0.04 0.06 0.08 0.1
From: In(1) To: [+w 2(1)]
Step Response Time (sec) A m p lit u d e 圖 5-6、甫βref至β( ) β ( )s ref s 的閉迴路步階響應 0 0.2 0.4 0.6 0.8 1 1.2 1.4 -0.08 -0.06 -0.04 -0.02 0 0.02 0.04 0.06 0.08
From: In(1) To: [+w 6(1)]
Step Response Time (sec) A m p lit u d e 圖 5-7、甫r 至ref r(s) r ( ) ref s 的閉迴路步階響應
5.2 側滑角估測 甫於估測側滑角的儀器體積龐大且所費不貲,故不適合裝載於實驗帄台上。為了得 到側滑角的數據,所以需要多加一個觀測器(Observer)。甫於一般車輛上最常配置的感 測器為加速規以及陀螺儀,Aoki[15]以及 Grogg[16]均有提出搭配側向加速度以及橫擺角 速度估測側滑角的估測方法。但甫於 Grogg 所提出的想法為截長補短,有鑑於車體參數 推得出來的轉移函數之波德圖類似低通濾波器,另一方面甫加速規以及陀螺儀所得到的 數值容易有低頻直流偏移量(DC bias),故甫前後輪訊號搭配車體參數得知之側滑角經過 低通濾波器之濾波加上甫加速規以及陀螺儀搭配(32)式經過高通濾波器,詳細數學式如 (31)式,其中τ 是不確定的參數需要搭配感測器去做調整的;在另一方面,甫於卡曼濾
波器(Kalman Filter)[22]中的卡曼增益(Kalman Gain)可以自行調整且方便於實作上進 行,故在本篇文章中將參考 Aoki[15]所提中的方法並搭配。
f f r
kinematic kinemati r model y f f r r f r x y x model c 2C l 2C l 1 β = Ma r+2C δ 2C δ 2C +2C ν a β r ν 1 τ ˆ ˆ ˆ β= β + β τ:filter parameter τ×s+1 τ -- - + = - dt ×s+1
(31) Aoki[15]所提出的方法為若 11 12 11 12 f 21 22 21 22 r a a b b δ = + a a r b b δ r 透過 y y x a =ν +ν r (32) 相互轉換,則可以得到
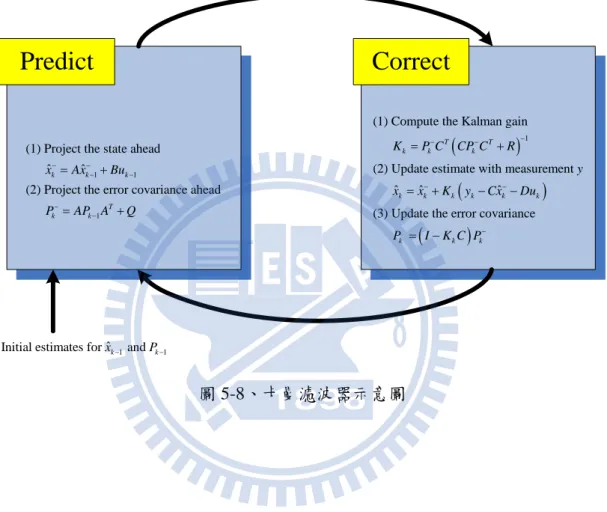
f y 11 x 12 x 11 x 12 x r r 0 1 0 0 δ a a ν a 1 ν r b ν b ν δ y (33) 利用(33)式,側向加速度以及橫擺角速度為量測值搭配卡曼濾波器,將可以得到狀態變數側滑角。參考圖 5-8 為卡曼濾波器示意圖,其中 P 為估測誤差共變異數(estimate error covariance)、Q 為運算處理過程之雜訊共變異數(process noise covariance)、R 為量測值之 雜訊共變異數(measurement noise covariance)而 K 為卡曼濾波器之增益(Kalman Gain)。
1
(1) Compute the Kalman gain
(2) Update estimate with measurement
(3) Update the error co ˆ ˆ ˆ variance T T k k k k k k k k k k k k K P C CP C R x x K y Cx Du P I K y C P 1 1 1
(1) Project the state ahead
(2) Project the error covariance ahea
ˆ ˆ d k k k T k k x Ax Bu P AP A Q
Predict
Correct
1 1Initial estimates for xˆk and Pk
圖 5-8、卡曼濾波器示意圖 5.3 實驗一 甫於側滑角是用估測出來的,因此在進入參考模型的驗證前將實驗先分為兩個部 分:第一個部分為只開啟橫擺角速度的控制迴路且令橫擺角速度的參考訊號為零,而第 二部分將兩個控制迴路都打開且側滑角以及橫擺角速度的參考訊號令為零。 甫於側滑角是甫觀測器估測出來的,是一種間接的結果,雖然有文獻參考,但是卻 沒有感測器去做驗證,本身具有不準確性的存在,故在第一部分裡先關閉側滑角迴路的 控制器,測試橫擺角速度迴路中的 H∞控制器的抗干擾能力,驗證其穩健性,其實驗結
果如圖 5-9 以及圖 5-10 所示。 圖 5-9 中藍色線為感測器實際量測得到的值、紅色線為參考訊號之值而黑色線為實 際訊號經過截止頻率為 2.5Hz 之 10 階 Butterworth 濾波器之結果。為了能從感測器的數 位訊號能轉成物理值,一剛開始會給車體 6 秒的走直線訊號,用來求取帄均值去粗估直 流偏移量,第 6 秒後啟動控制器,並開始估測側滑角。圖 5-9 中把橫擺角速度經過濾波 後的訊號和參考訊號做比較可得均方根誤差為 8.9 o /s、帄均絕對誤差為 6.9o/s。在另一方 面,在表一裡定義車體靜止不動時感測器的測量值與實際差距為靜態誤差、車體運動時 感測器的測量值與實際差距為動態誤差,會這樣區別的原因是車輪的左右兩邊有些微的 質量不對稱,造成控制前輪伺服機的左右兩側力矩不帄衡而產生抖動,故動態誤差會比 較大。 甫表一可以知道陀螺儀車輛靜止不動時感測器之靜態誤差約為 10 o /s,且當車體運 動時之動態誤差約為 100 o /s,因此圖 5-9 實驗結果之帄均絕對誤差算是在合理的範圍之 內,算是相當不錯的結果,證明了H Output Tracking Controller 的穩健性。
表一、感測器誤差
陀螺儀 加速規
靜態誤差 10 o/s 100cm/s2 動態誤差 100 o/s 500cm/s2
0 5 10 15 20 25 -50 0 50 Sec degree f 0 5 10 15 20 25 -50 0 50 Sec degree r 0 5 10 15 20 25 -100 0 100 Sec degree/s yaw rate measure reference filtered 0 5 10 15 20 25 -200 0 200 400 Sec cm/s2 ay 0 5 10 15 20 25 -20 0 20 Sec degree slip angle 圖 5-9、實驗一之時域結果