國
立
交
通
大
學
光電工程學系碩士班
碩
士
論
文
筆型光學滑鼠之設計
Design of Pen-Type Optical Mouse
研 究 生:曾進興
指導教授:陳志隆 博士
筆型光學滑鼠之設計
Design of Pen-Type Optical Mouse
研 究 生:曾進興 Student:Jin-Shing Tseng
指導教授:陳志隆 Advisor:Jyh-Long Chern
國 立 交 通 大 學
光電工程學系碩士班
碩 士 論 文
A ThesisSubmitted to Institute of Electro-Optical Engineering College of Electrical and Computer Engineering
National Chiao Tung University in partial Fulfillment of the Requirements
for the Degree of Master
in
Electronics and Electro-Optical Engineering June 2012
Hsinchu, Taiwan, Republic of China
i
筆型光學滑鼠之設計
碩士研究生:曾進興 指導教授:陳志隆教授
國 立 交 通 大 學
光電工程學系碩士班
摘要
筆型光學滑鼠以光學滑鼠成像概念為基礎,外型為筆型之設計。與傳統 光 學 滑 鼠 之 主 要 差 異 在 於 照 明 元 件 採 用 同 軸 照 明 設 計 ( Co-axial illumination),優點是重量體積較一般光學滑鼠輕薄,並且方便攜帶。採用 藍芽無線技術使得操作方便,以及根據設計,適用於大部份材質上。因目前 市面上筆滑鼠體積仍稍嫌略大,體積無法與一般用筆相比擬;另外,市面上 的設計皆利用一般型發光二極體,消耗功率較多,為了節省成本與節約能 源,本論文嘗詴使用黏著型發光二極體 (SMD LED, Surface-mount device Light-emitting Diode)發光元件,此類元件體積較小,重量減輕,消耗功率 較少,成本亦比一般型 LED 較低。本篇論文利用新思科技公司(Synopsys, Inc.) 之光學軟體 CODE V 設計模擬成像系統的部分,以及利用 Light tools 設計 模擬非成像系統的部分。從成像到非成像元件及機構設計著手,且針對使用 端進行長景深公差分析,最後設計一更加輕薄與更加節能之筆型光學滑鼠產 品。ii
Design of Pen-Type Optical Mouse
Student: Jin-Shing Tseng Advisor: Dr. Jyh-Long Chern
Institute of Electro-Optical Engineering
National Chiao Tung University
ABSTRACT
The pen-type optical mouse is an innovative mouse design which based on the principle of original optical imaging theory but it reduces the volume of mechanism much smaller to be pen-shape. In the thesis, it presents the design of “co-axial” illumination device to improve the size problem and to arise the MTF performance of imaging lens in the meantime.
Besides, taking the problems of economizing power and cost into consideration, this thesis uses the SMD LED (Surface-mount device Light-emitting diode) for its smaller size, lower power loss, and besides, the cost is lower than the general LED. In another part, the imaging lens takes the concepts of depth of focus into design for its long hyperfocal distance application. To confirm the accuracy, this thesis presents the tolerance analysis of depth of field versus MTF, the tilted angle versus imaging performance and the tolerance analysis of uniformity and efficiency of the illumination part.
iii
誌
謝
回首這兩年於風城逗留,研究所生涯顯得若輕若重,在學校的時刻大多陷於學術世 界的重重密網,而返回住處又能遠離塵囂被溫暖包覆。 關於這本論文的完成首先感謝研究所指導老師陳志隆教授,感謝您在光學設計的領 域雕琢我,不僅僅是理論與技術,您亦為我們釐清未來理想的方向,指引我們走向有意 義的大道上。亦要感謝實驗室學長姐們,竹明學長帶領的影像處理專題;以及剛進研究 所時,介任學長熱情地分享學習上的心得;偉宏、柏宇、意雯、書正,學長姐們陪伴我 們一年的時光,這期間每每看完你們的報告,都使我感覺想法成長不少。戰友們志庭、 明憲、竑瑋、弘胤、國展以及品儀,日子雖短,我們卻共同經歷了好多。從每個星期的 週報、彼此討論設計上的想法,至時常的聚餐甚至出遊,很抱歉我時常因故缺席,也很 感謝你們這兩年來的包容。 由衷感謝老師在碩一升碩二的暑假為我們安排金灶光學的暑期實習,除了理論的驗 證,也讓我看到光學設計實務上的許多表現。期間要感謝幫助過我的 Helen 姊、安琪姊、 雪珍姊、Alex 哥、Nick 哥還有 Rick 哥,尤其是 Helen 姊,我永遠不會忘記在測量光學 滑鼠的特性時的那個小隔間,在那裡在您身上我學到了嚴謹的態度與求真的性格。 接著謝謝我的室友嘉振、柏維有時還有政文、瑋哲。我永遠不會忘記愛丁堡男豬喊 們以及大家的女友每次聚會的笑鬧時刻,你們讓我在這時常下雨的風城徹底感到安心, 在我們的桌遊、紅酒聚會中,分享各自的生活也讓我了解不同研究領域的甘與苦。 當然還要感謝女友季樺,哎還是習慣叫妳小晃,我們新竹台中往返,感謝妳每次在 我低落時陪伴我給予我鼓勵,想對妳說的話永遠還是太多,但我想我們能夠慢慢訴說。 最後是最最重要的家人,謝謝爸媽供給我唸研究所,每每在設計做不出來時,我便 會走到田家炳光電大樓的樓梯間,播通電話聽聽你們的聲音,儘管只是聊著瑣事,但之 後總感覺又有力氣堅持下去了。還有姊姊與妹妹,妳們給我的打氣我始終放在心裡,也 祝福妳們各自的學習都能順利。 我曾經這樣的詵描寫新竹生活:「夢裡還在上個城市曬被/醒來已在多雨的臥榻/ 時日流轉一如這風/逼近牆角,跳躍/向更亮的天際轉彎」(2010) 謹以此詵紀念我的研究時光,謹以此文獻給所有幫助過我的人。
iv
目
錄
中文摘要 ……… i 英文摘要 ……… ii 誌謝 ……… iii 目錄 ……… iv 表目錄 ……… vii 圖目錄 ……… ix 一、 緒論……… 1 1.1 1.1.1 1.1.2 1.2 1.3 1.4 光學滑鼠發展簡述與種類比較……… 光學滑鼠發展簡述……… 光學滑鼠種類比較……… 筆型光學滑鼠優勢與目前市場……… 研究動機與目的……… 論文架構……… 1 1 2 4 4 4 二、 成像光學系統介紹與成像品質分析……… 6 2.1 成像光學系統介紹……… 6 2.2 像差簡介……… 7 2.3 簡易光學設計概念與進階變數……… 10 2.3.1 簡易光學設計概念……… 10 2.3.2 進階變數介紹……… 11 2.4 成像品質名詞介紹……… 12 三、 基本原理介紹……… 18 3.1 光學滑鼠操作原理……… 18 3.2 3.2.1 3.2.2 3.3 3.3.1 3.3.2 CMOS 影像感測器元件……… CMOS 影像感測器元件簡介……… CMOS 影像感測器位移與方向偵測方法……… CMOS 影像感測器元件-PAW3204DB ……… PAW3204DB 感測器規格 ……… PAW3204DB 感測器重要參數 ……… 19 19 21 22 22 24
v 四、 筆型滑鼠之成像系統光學設計……… 26 4.1 導論……… 26 4.2 4.2.1 4.2.2 4.3 4.4 4.5 4.5.1 設計規格……… 光學設計規範-能看得見……… 光學設計規範-能看得清楚……… 設計流程……… 優化方式……… 設計結果……… 成像性能評價……… 27 27 28 31 31 33 34 五、 公差分析……… 43 5.1 公差介紹……… 43 5.2 5.2.1 5.2.2 5.2.3 5.3 5.3.1 5.3.2 鏡組公差分析……… 公差範圍決定……… 公差模擬結果……… 公差結果分析與說明……… 使用端公差分析……… 傾斜角公差項說明與結果……… 傾斜角公差結果分析……… 43 43 44 47 50 50 51 六、 光學機構件建立……… 53 6.1 6.1.1 6.1.2 6.1.3 6.1.4 機構件說明與規格訂定……… 應用端之使用者需求說明……… 光導(Light guide)與環狀反射體(Cone reflector)設計說明……… 黑件(Black cone reflector)說明……… 設計規格表與挑戰……… 53 54 54 55 55 6.2 6.2.1 6.2.2 6.2.3 6.2.4 機構件設計結果與光學模擬……… 能量轉換原理及均勻度計算說明……… 設計與光學模擬結果……… 光導入光口製造公差分析……… 光導入光口改善進光效率分析……… 56 56 59 62 69
vi 6.2.5 分析與討論……… 72 七、 7.1 7.2 7.2.1 7.2.2 結論與未來展望……… 結論……… 未來展望……… 布朗扭曲模型(Brown’s distortion model)……… 幅狀基底方程(Radial Basis Function)………
73 73 74 75 77 參考文獻 附錄一 附錄二 ……… Code V 優化巨集指令……… Matlab指令-Brown’s distortion model………
79 81 87
vii
表目錄
表 2.1 規格表基本要素……… 7 表 2.2 三階像差係數的物理意義……… 9 表 2.3 孔徑大小與視場大小對於像差的關係……… 11 表 2.4 k 值與二次曲面關係……… 12 表 3.1 PAW3204DB CMOS 光學滑鼠感測器主要規格表……… 23 表 4.1 CCD 與 CMOS 優缺點比較……… 28 表 4.2 鏡頭選定之 CMOS 規格……… 28 表 4.3 筆滑鼠成像光學規格表……… 30 表 4.4 優化運算元與限制……… 31 表 4.5 訂定規格與設計值結果比較……… 33 表 5.1 公差類型分類與規格……… 44 表 5.2 鏡頭在物距為 32mm,空間頻率 25lp/mm,良率 97.7%(2σ)之公差分析…… 45 表 5.3 鏡頭在物距為 35mm,空間頻率 25lp/mm,良率 97.7%(2σ)之公差分析…… 46 表 5.4 鏡頭在物距為 38mm,空間頻率 25lp/mm,良率 97.7%(2σ)之公差分析…… 46 表 5.5 鏡頭在物距為 32mm,空間頻率 16.67lp/mm,良率在 97.7%(2σ)之公 差分析……… 48 表 5.6 鏡頭在物距為 35mm,空間頻率 16.67lp/mm,良率在 97.7%(2σ)之公 差分析……… 48 表 5.7 鏡頭在物距為 38mm,空間頻率 16.67lp/mm,良率在 97.7%(2σ)之公 差分析……… 49 表 5.8 不同傾斜角度時的最大孔徑表……… 52 表 6.1 筆滑鼠完整規格表……… 55 表 6.2 本論文選用型號為 19-215UBC 之 SMD LED 規格……… 56 表 6.3 19-217R6C 系列 SMD LED 之發光強度表……… 57 表 6.4 各組態均勻度與光效率數值……… 60 表 6.5 各公差效率數據整理表……… 67 表 6.6 各公差均勻度數據整理表……… 68 表 6.7 入光口設計於感光元件有效範圍之入光效率、均勻度比較表……… 71viii
表 6.8 本論文設計值與一般市售光學滑鼠之光通量比較表……… 72 表 7.1 桶型與枕型扭曲修正……… 77
ix
圖目錄
圖 1.1 滑鼠發展簡史……… 1 圖 1.2 BlueTrack 藍光滑鼠架構圖……… 2 圖 1.3 一般光學追跡示意圖與感測影像(左),雷射光線追跡示意圖及感測影 像(右)……… 3 圖 1.4 暗視角雷射照明工作示意圖……… 3 圖 2.1 光學系統簡易圖……… 6 圖 2.2 光學系統座標定義……… 8 圖 2.3 縱向色差。因為波長的不同形成折射率差異,造成藍光波段比紅光波段 較早聚焦而形成縱向色差……… 10 圖 2.4 橫向色差。在同一焦帄面,不同波段的光折射至成像面的位置不同而造 成色偏移的情形……… 10 圖 2.5 二次曲面關係圖……… 12 圖 2.6 畸變圖。(a) 8% 正畸變(又稱枕形跡變)(b)6% 負畸變(又稱桶形畸變)。 矩形格線為理想成像情形……… 13 圖 2.7 主光線角度示意圖……… 14 圖 2.8 一般成像光學系統……… 15圖 2.9 USAF 1951 Test Chart……… 16
圖 2.10 MTF 表示圖……… 17 圖 3.1 光學滑鼠照明並擷取桌面影像圖……… 18 圖 3.2 光學引擎辨識影像圖。影像 B 為影像 A 之後拍攝,可觀察有許多共同的 圖樣往左下方移動……… 19 圖 3.3 CMOS 影像感測器架構……… 20 圖 3.4 (a)被動像素感測器架構 (b)主動像素感測器架構……… 20 圖 3.5 (a)畫素位址地圖 (b)以”白紙”為待測物所感應的調階值……… 21 圖 3.6 區塊動態預測法示意圖……… 22 圖 3.7 PAW3204DB 感測器內部功能區塊圖……… 24 圖 4.1 一般光學滑鼠結構簡圖……… 26 圖 4.2 筆滑鼠結構簡圖……… 26
x
圖 4.3 景深示意圖……… 29
圖 4.4 設計優化流程圖……… 31
圖 4.5 設計結果。左為鏡片配置圖,由上往下依序為物距 32、35、38mm 的組態; 右圖為一階資料……… 33
圖 4.6 物距 32mm-像散、場曲與畸變曲線圖(astigmatism field curve and distortion curve) ……… 34
圖 4.7 物距 32mm-畸變格線圖(distortion grid) ……… 35
圖 4.8 物距 32mm-光斑圖(spot diagram) ……… 35
圖 4.9 物距 32mm-MTF 曲線圖……… 36
圖 4.10 物距 32mm-Ray aberration 圖……… 36
圖 4.11 物距 35mm-像散、場曲與畸變曲線圖(astigmatism field curve and distortion curve) ……… 37
圖 4.12 物距 35mm-畸變格線圖(distortion grid) ……… 37
圖 4.13 物距 35mm-光斑圖(spot diagram) ……… 38
圖 4.14 物距 35mm-MTF 曲線圖……… 38
圖 4.15 物距 35mm-Ray aberration 圖……… 39
圖 4.16 物距 38mm-像散、場曲與畸變曲線圖(astigmatism field curve and distortion curve) ……… 39 圖 4.17 物距 38mm-畸變格線圖(distortion grid) ……… 40 圖 4.18 物距 38mm-光斑圖(spot diagram) ……… 40 圖 4.19 物距 38mm-MTF 曲線圖……… 41 圖 4.20 物距 38mm-Ray aberration 圖……… 41 圖 5.1 鏡頭在物距為 32mm,空間頻率取至 25lp/mm 時的公差分析結果………… 44 圖 5.2 鏡頭在物距為 35mm,空間頻率取至 25lp/mm 時的公差分析結果………… 45 圖 5.3 鏡頭在物距為 38mm,空間頻率取至 25lp/mm 時的公差分析結果………… 46 圖 5.4 鏡頭在物距為 32mm,空間頻率取至 16.67lp/mm 時的公差分析結果…… 47 圖 5.5 鏡頭在物距為 35mm,空間頻率取至 16.67lp/mm 時的公差分析結果…… 48 圖 5.6 鏡頭在物距為 38mm,空間頻率取至 16.67lp/mm 時的公差分析結果…… 49 圖 5.7 傾斜角度在 CODE V 上的 2D 模擬圖……… 50
xi 圖 5.8 物距為 32mm 處之各傾斜角度與 MTF 曲線變化圖……… 50 圖 5.9 物距為 35mm 處之各傾斜角度與 MTF 曲線變化圖……… 51 圖 5.10 物距為 38mm 處之各傾斜角度與 MTF 曲線變化圖……… 51 圖 6.1 光學滑鼠機構件示意圖……… 53 圖 6.2 筆滑鼠機構件示意圖……… 54 圖 6.3 19-215UBC SMD LED 之基本電光特性曲線圖……… 58 圖 6.4 在 Lighttools 輸入配光曲線作遠場強度模擬以確認光源可靠性……… 59 圖 6.5 筆滑鼠機構件模擬圖……… 60 圖 6.6 光經過筆滑鼠機構件後於各組態照度模擬圖……… 60 圖 6.7 各表面之收光效率分布……… 61 圖 6.8 原始設計模擬圖(發光元件與光導空氣間隙為 0.1mm)……… 62 圖 6.9 無空氣間隙之模擬示意圖……… 62 圖 6.10 無空氣間隙且往 x 方向位移+0.1mm 模擬示意圖……… 63 圖 6.11 無空氣間隙且往 x 方向位移+0.2mm 模擬示意圖……… 63 圖 6.12 無空氣間隙且往 x 方向位移-0.1mm 模擬示意圖……… 64 圖 6.13 無空氣間隙且往 x 方向位移-0.2mm 模擬示意圖……… 64 圖 6.14 無空氣間隙且往 z 方向位移+0.1mm 模擬示意圖……… 65 圖 6.15 無空氣間隙且往 z 方向位移+0.2mm 模擬示意圖……… 65 圖 6.16 無空氣間隙且往 z 方向位移-0.1mm 模擬示意圖……… 66 圖 6.17 無空氣間隙且往 z 方向位移-0.2mm 模擬示意圖……… 66 圖 6.18 入光口結構修正……… 69 圖 6.19 矩形環狀入光口設計……… 70 圖 6.20 於入光口加一透鏡……… 70 圖 6.21 於入光口加一透鏡設計,空氣間隙為 0.05mm……… 71 圖 7.1 傾斜角度 50∘的扭曲(distortion)分布……… 74 圖 7.2 傾斜角度-50∘的扭曲(distortion)分布……… 75 圖 7.3 以 400x400 畫素個數的方格進行-10%之桶型畸變修正……… 76 圖 7.4 以 400x400 畫素個數的方格進行+10%之枕型畸變修正……… 76 圖 7.5 CODE V 內建扭曲格線圖……… 78
1
第一節 緒論
1.1 光學滑鼠發展簡述與種類比較
1.1.1 光學滑鼠發展簡述
自從 1999 年安捷倫公司(Agilent Technologies)發布了第一顆 IntelliEye 光學引擎 後,光學滑鼠定位技術趨於穩定,從此光學滑鼠便大量取代傳統機械式滾輪滑鼠。2003 年,羅技公司(Logitech)與微軟公司(Microsoft)分別推出以藍芽為通訊協定的藍芽 滑鼠[1]。 2005 年,羅技公司與安華高公司(Avago Technologies)合作推出第一款無線且可 充電之雷射滑鼠。2006 年,第一隻克服玻璃障礙的有線雷射滑鼠與藍芽雷射滑鼠先後問 世。2008 年微軟公司採用以藍光辨識的 BlueTrack 技術推出藍光滑鼠,此滑鼠的特性為 加載了藍光發光二極體及廣角鏡,幾乎在所有材質表面都可使用[1]。 2009 年羅技公司推出暗視角(darkfield)雷射追蹤技術,使得滑鼠感光元件能如同 人的眼睛看見夜晚清澈的星空般地看見透明材質中的小瑕疵、灰塵以及微粒等微小物 體,並藉以提供辨識定位資訊[1][2]。同年,蘋果電腦公司(Apple)推出新產品-魔術 滑鼠(magic mouse),此滑鼠移去所有滑鼠按鍵、滾輪,只以一片多點觸控板,便能 提供一般滑鼠的左、右鍵,以及 360 滾輪跟兩指手勢操作視窗縮放的功能[1]。圖 1.1 為 滑鼠發展簡史。 圖 1.1 滑鼠發展簡史 資料來源:陳智信, 楊智慧, 黃耿祥, “掌上明珠-滑鼠,”科學發展月刊第 460 期 page63,201104
2 1.1.2 光學滑鼠種類比較 光學式滑鼠發展至今,為了因應更好的影像處理晶片,亦同時不斷改良內部之成像 鏡頭,目的皆為了克服先天光學波長的特性限制,使滑鼠能夠使用在大部分的材質上。 目前市場上滑鼠的感應器類型以紅光、藍光及雷射為大宗。 紅色光波段(約 630-700nm)有時會被納括在長波長的波段範疇內,一般光學滑鼠 皆使用紅色的發光二極體(LED, Light Emitting Diode)。利用光照射在待測物體表面(如 桌面、滑鼠墊等)並反射出粗糙表面的陰影之後,透過鏡頭成像至內部的感光元件,最 後透過感光元件的影像處理晶片高頻掃描比對,來計算滑鼠的移動及速度。因此待測表 面之紋理變化對於光學滑鼠的移動辨識有絕對的幫助,若是在金屬、磁磚、大理石或玻 璃等光滑表面,反射成像上恐怕較難辨識,這也就是光學滑鼠發展遇到之主要課題。市 面上亦有使用紅外線發光二極體之不可見光波段的光學式滑鼠[3]。 2008 年微軟公司推出 BlueTrack 技術的短波長藍光型滑鼠,如圖 1.2。此技術特點 在於 1.使用藍光作為光源,藍光波長短(約 450nm),反射回來的影像解析度較高。2. 短波長的光穿越介質能力較低,於是在透明光滑表面如玻璃,亦可反射回來。3.在光學 系統增加一個透鏡來分散光源,而取得比一般光學大四倍的照射面積,使反射回來的資 訊量變多,最後靠著對焦鏡頭及影像處理晶片解析資訊並做定位。目前 BlueTrack 技術 之藍光滑鼠已被廣泛使用[3]。 圖 1.2 BlueTrack 藍光滑鼠架構圖[4]
資料來源:網路資料, “Q&A with Mark DePue, Platform Engineering Manager, Hardware Group,“http://www.maximumpc.com/article/features/everything_you_need_know_about_mic rosofts_bluetrack_mouse_technology?page=0%2C1
3
雷射滑鼠使用雷射二極體(LD, Laser Diode)作為光源,發出具有指向性的窄幅光 束,照射範圍變小,但能夠直接反射出材質表面的細節,搭配使用高倍率的感測元件, 而有更好的表面追蹤及辨識能力。如圖 1.3。
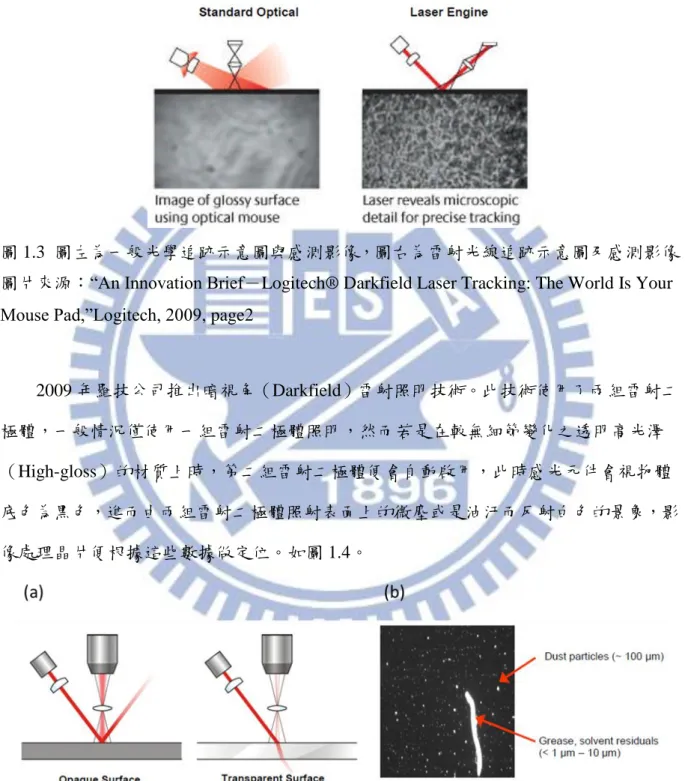
圖 1.3 圖左為一般光學追跡示意圖與感測影像,圖右為雷射光線追跡示意圖及感測影像 圖片來源:“An Innovation Brief-Logitech® Darkfield Laser Tracking: The World Is Your Mouse Pad,”Logitech, 2009, page2
2009 年羅技公司推出暗視角(Darkfield)雷射照明技術。此技術使用了兩組雷射二 極體,一般情況僅使用一組雷射二極體照明,然而若是在較無細節變化之透明高光澤 (High-gloss)的材質上時,第二組雷射二極體便會自動啟用,此時感光元件會視物體 底色為黑色,進而由兩組雷射二極體照射表面上的微塵或是油汙而反射白色的景象,影 像處理晶片便根據這些數據做定位。如圖 1.4。 圖 1.4 圖左(a)為暗視角雷射照明分別在不透明與透明材質上的工作示意圖;圖右(b)為在 玻璃樣本上感應之圖像,可觀測出表面上之微塵與油汙
圖片來源:“An Innovation Brief-Logitech® Darkfield Laser Tracking: The World Is Your Mouse Pad,”Logitech, 2009, page4
4
1.2 筆滑鼠優勢與目前市場
筆滑鼠主要優勢在於:筆型設計,合乎日常人體工學、攜帶方便,搭配無線技術在 使用上更加方便。
目前國內市場以昆盈公司(Genius)為主要設計供應廠商[5]。國外的部分為美國的 Fentek Industries 公司(產品-Wireless Ergonomic Mouse Pen)[6]、FingerSystem 公司(產 品-P&M Neo wireless)[7]、Salient Technology(國內代理商為昇凌科技)[8]以及 Ultra 公司[9]。 其中 Ultra 公司的 U12-40871 無線筆滑鼠更將雷射投射筆與滑鼠作結合,使用者能 夠在報告時隨即轉換滑鼠與雷射筆。
1.3 研究動機與目的
因目前市面上筆滑鼠體積仍稍嫌略大,以昆盈之筆滑鼠為例,筆寬、筆高與筆長分 別為 [5],體積無法與一般用筆相比擬。另外,市面上的設計皆利用一 般型發光二極體,為了節省成本與節約能約,本論文嘗詴採取黏著型發光二極體(SMD LED, Surface-mount device Light-emitting Diode)發光元件,此元件體積較小,重量減輕, 成本亦可比一般型 LED 減少約 30%~50%[10]。 本著上述的理念,本論文不僅欲設計一更加輕薄、期待能夠利用模擬軟體設計出更 加節能之筆滑鼠產品。1.4 論文架構
本篇論文的架構建立於對光學滑鼠的著墨,由光學滑鼠的背景與光學滑鼠操作原 理,進而設計筆型滑鼠、成像鏡組實際設計流程、非成像機構之光源模擬設計與公差分 析以及在最後一章做結論。5
軟體 CODE V、Light tools 進行設計與公差分析。各章節架構如下: 第一章 緒論 介紹光學滑鼠發展背景與目前滑鼠種類比較,以及說明研究動機與目的。 第二章 成像光學系統介紹與成像品質分析 介紹光學設計之基本原理,另外由於後幾章會討論到成像光學系統之像差比 較,於是在此章先說明像差與成像品質之關係。 第三章 光學滑鼠基本原理介紹 討論光學滑鼠如何運作,並且提及影像處理技術與感光元件的介紹。 第四章 筆滑鼠之成像系統光學設計 依需求建立起規格,作流程分析以及設計優化,對於成像性能做討論。 第五章 成像系統公差分析 納入公差分析,由製造端的鏡組公差為主,使用端的傾斜角公差分析為輔,進 行討論。 第六章 機構件建立介紹 完成鏡組設計後,討論導光機構件之設計,並針對面臨之挑戰進行修改設計、 優化,最後分析、比較規格。 第七章 結論與未來展望 本章將此論文的設計與分析做統整,得出產品之可能性結論,並分享個人在設 計上的心得。並且於未來展望延伸思考,提出數位影像處理的方式修改扭曲變 形以求精進。
6
第二章 成像光學系統介紹與成像品質分析
2.1 成像光學系統介紹
光學系統運用的原理為利用光線經過透鏡產生的折射與反射,使物體經過透鏡而成 像,光學系統使用的單位大約位於毫米(mm, millimeter)甚至到微米( m ,micrometer),於是利用幾何光學的知識便足可建立起光學系統。一般光學系統簡略來分,可分成物空間(object space)、光學系統(optical system)與像 空間(image space)三個部份,如圖 2.1,每個部份對應的物理關係與成像表現便構成了基 本的規格表架構,如表 2.1。 圖 2.1 光學系統簡易圖 表 2.1 之規格不一定完全都要納入考慮,一般依使用者需求而定。規格表的切入點 有兩項:第一是要確保像能夠看得見以及第二是要能夠看得清楚。簡單來說,像要能夠 被看見,首當其衝便是照度的問題。於是感光元件的選定、光源的使用頇搭配適當,而 後根據選定之元件方可進行設計;像要能被看清楚,即要確立設計時該用哪些準則,來 確定成像品質到達某個標準後,物體成像即能夠看得清楚。一般鏡頭成像所關心的成像 品質為 MTF(Modulation Transfer Function)與 Distortion。這兩項將在後面幾節進行說明。 常見之成像系統有望遠鏡、照相機、眼鏡等;非成像系統有照明系統、液晶面板之 背光模組等等。本論文之設計不含有變焦功能,於是僅以定焦鏡規格進行設計。
7 表 2.1 規格表基本要素 物空間 Object Space 光學系統 Optics 像空間 Image Space 1.物高 Object height 1.維度 Dimension 1.感光元件類 型 Sensor type 2.物距 Object distance
2.出射與入射光瞳 Exit and Entrance pupils (location and size)
2.像高 Sensor height 3.視角 Field of view 3.一階光學規格 First-order optics specification 3.像距 Sensor distance 4.亮度 Brightness (luminance) 4.三階像差規格 Three-order aberration specification 4.感光度 Sensitivity (Field of view) 5.光譜分布 Spectrum (wavelength) 5.一維點光源之成像品質 Imaging quality of point-like source (spot
size/MTF) 5.畫素類型/ 畫素大小 Pixel type/size 6.散發通量 Emitted Flux (Object NA) 6.二維物體之成像品質 Imaging quality of 2D-like object (field curvature/astigmatism/distortion)
6.相對照度 Relative Illumination
7.三維物體之成像品質 Imaging
quality of 3D-like object (depth of field/focus) 7.光譜分布 Spectrum (wavelength) 8.其他:如穿透率(Transmission) 8.接收通量 Flux Acceptance (Image NA)
2.2 像差簡介
光線在光學系統內傳遞的過程中,經由透鏡的折射、反射鏡的反射到達成像面。若 所見即所物,光線的傳遞毫無誤差,則稱作完美成像:反之,由於在光線的傳遞中,遇8 見之透鏡曲率不同、所走光程不同,甚至不同波長對應透鏡折射率的差異,使得在成像 上產生誤差,此時成像面上的實際影像與理想影像產生差異,此即產生像差。另外,甚 至光源位置位於離軸或者軸上其他位置,亦會產生不同種類的像差。 在現今光學軟體的成像評估中,往往看的是光點圖(Spot diagram)。光點圖可視 為光線經光學系統達成像面後,將其與理想光線成像位置之差異量化以後描繪出來的成 像表現。由光斑大小可得知成像品質的好壞以及各種像差的表現,設計者可依據像差之 物理意義與數學公式推演出優化的變因以改善像差。 如圖 2.2 所示,一般光學系統皆假定為一對稱光軸之對稱系統,於是所有表面皆視 為環繞光軸,我們可定義其為一極座標系統[11]。 圖 2.2 光學系統座標定義 以點光源發出球面波視之為參考波前,實際與理想波前像差可由 Seidel 波面像差展 開式 2-1 表示為: Eq.2-1 其中 包含了 像差係數,r、 、 分別為物高、入瞳大小、入瞳面光線 與 y 軸的夾角。一般來說,三階項之 Seidal 像差即可表示各像差,更高階的係數因較缺 乏規律性於是通常忽略,但在各光學設計軟體上設計時,設計者可利用軟體算出 5 階項 差甚至設定優化限制。三階像差係數的物理意義與敘述如表 2.2。[12]
9 表 2.2 三階像差係數的物理意義 像差係數 名稱 物理意義 球面像差 (Spherical aberration) 與光軸帄行入射光,在鏡 片不同高度偏折造成軸 上焦點的偏移差異。 彗星像差 (Coma aberration) 離軸主光線之成像點向 視界中心或外緣做彗星 狀擴散的像差。 斜向像差 (Astigmatism) 離軸光線於水帄與垂直 方向的聚焦點不一致而 形成的像差。 場曲 (Field curvature) 當前述球差、彗差及像散 皆修正為零,離軸物距與 軸上物距較長造成像點 位置不同,形成一曲面。 畸變 (Distortion) 離軸物點成像與理想近 軸成像之放大率不同而 形成像點的形變。 表 2.2 所列舉的像差通稱為賽德像差(Seidel aberration),皆為單色光的像差表現。 此外若是光學系統的光源並非單色光,我們則需討論多光色所引起的像差。色差 (Chromatic Aberration)成因是由於不同波長的光對於相同介質會有不同的折射率反 應,導致在像帄面的成像位置有所差異。一般可分為縱向色差(longitudinal chromatic aberration)與橫向色差(lateral color/chromatic)的情形。在做光學設計的品質評估時, 時常討論橫向色差,以判斷色偏移的情況。
10 圖 2.3 縱向色差。因為波長的不同形成折射率差異,造成藍光波段比紅光波段 較早聚焦而形成縱向色差 圖 2.4 橫向色差。在同一焦帄面,不同波段的光折射至成像面的位置不同而造成色偏移 的情形
2.3 簡易光學設計概念與進階變數
2.3.1 簡易光學設計概念 在設計初期階段(Pre-design)我們傾向使用高斯光學(Gaussian optics)近似,理 由為守住近軸光學(paraxial optics)條件以達完美成像(perfect imaging),以高斯光學 切入並能簡易估計像差同時作有效削減,甚至簡易公差分析。f/#(f-number)為一個設計的中心指標,f/#決定以後,整個光學系統的架構便進而 訂定。如式 2-2,f/#為有效焦長(EFL, Effective focal length)與光圈直徑(Clear aperture) 的比值,NA 為數值孔徑(Numerical aperture)、 為邊緣光線與光軸夾角、E 為中心照 度(Illuminance)、t 為材質穿透率(transmittance)、B 為光源亮度(Brightness)。
11 Eq.2-3 Eq.2-4 由式 2-3、式 2-4 可知,中心照度與 呈反比。通常決定 f-number 的值,需仰 賴感光元件之感光度與張角 。 在像差的削減上可參考近軸成像,不同的孔徑大小以及視場大小皆會影響像差的比 重,如表 2.3。 表 2.3 孔徑大小與視場大小對於像差的關係 2.3.2 進階變數 進行設計時,我們亦可引入非球面表面來削減離軸光線之像差,如下式 2-5 所示。 Eq.2-5 其中z為鏡面深度(sag)、c 為鏡面中心曲率(curvature)、y 為鏡面上任一點至光軸之垂直 高度、k 為錐形係數(conic constant),決定二次曲面的形式如表 2.4 所列。AD、AE、AF、
12 AG……等為非球面高次項係數。 圖 2.5 二次曲面關係圖 表 2.4 k 值與二次曲面關係 k>0 橢圓面(短軸在光軸上) k=0 球面 -1<k<0 橢圓面(長軸在光軸上) k=-1 拋物面 k<-1 雙曲面
2.4 成像品質名詞(MTF、Distortion)介紹
(1) 光學畸變(Optical distortion) 畸變為離軸物點成像與理想近軸成像之放大率不同而形成像點的形變[13]。畸變情況 會隨著透鏡不同區塊擁有不同焦距與不同放大倍率而更加顯著[14],一般而言,隨著視 場角越大,畸變越大,然而其變化曲線不為線性。此種像差只影響成像的形狀,並不影 響清晰度。於光學系統的計算公式如式 2-6。 Eq.2-6 如果像點位置比理想位置遠離光軸,則畸變為正,稱為枕形畸變(pincushion13 distortion),如圖 2.6a。反之,像點位置比理想位置接近光軸,則畸變為負,稱為桶型 畸變(barrel distortion),如圖 2.6b。在一般矩形感光元件,邊緣四個角落的畸變情形 與中心相比若等於或小於 1%,畸變情形不顯著,品質良好;此外,若在 2%~3%之間, 通常亦能被規格接受。[13] 圖 2.6 畸變。(a) 8% 正畸變(又稱枕形跡變)(b)6% 負畸變(又稱桶形畸變)。矩形格 線為理想成像情形 (2) 橫向色差(Lateral color) 離軸光線由於波長不同,其成像位置不同造成放大率的差異。一般感光元件接收面 皆排列RGB畫素值,所以感光元件在接收多色光源輸入時,最長波長的紅光與最短波 長的藍光成像位置差異必頇要求在一個畫素(pixel)大小以內,否則在感光元件上的感 應會造成色彩偏移的情形[15]。 (3) 相對照度(Relative illuminance) 相對照度定義為視場週邊照度與中央照度的百分比。依近軸光學理論計算方式如式 2-7: Eq.2-7
14 其中 為畫面邊緣照度、 為畫面中心照度。 相對照度與光圈大小以及入射至像帄面的角度有關,光圈越大則相對照度越高,反 之則越低,相對照度與 f/#關係已於上節討論。光線入射至像帄面的角度可由 定律 所規範,角度越大則邊緣視場照度相對於中心視場會越低。如果一個光學系統的相對照 度低於 60%,則可被人眼所輕易辨識出畫面邊緣與畫面中心的亮度差異[15]。
(4) 主光線角度(Chief ray angle)
主光線有許多定義,端看使用面去選定。一般指的是穿過光學系統之光圈孔徑中心 的斜向出射光線,而主光線角度則為此出射角度,如圖 2.7。在照射相同面積的光線下, 光線的直射與斜射會影響照射面接收的功率與強度,光線直射結果較佳。於是在成像光 學系統的設計中,為了使感光元件能接收較高功率與能量,必頇使主光線的角度在不影 響像差修正的情況下越小越好[15]。 圖 2.7 主光線角度示意圖 (5) MTF(Modulation Transfer Function)調制轉換函數
一組成像光學系統的優劣,最重要的即是成像品質的表現,而測詴成像品質一般最 主要的方式就是觀測其 MTF(Modulation Transfer Function)表現[16]。
我們可將一般的成像光學系統簡化如圖 2.8 所示,其中 、η為物空間座標,u、v 為像空間座標,x、y 為孔徑的座標,zo 與 zi 分別為光圈至物面與光圈至像面的距離。
15 圖 2.8 一般成像光學系統 根據光線經光學系統至像帄面的成像富氏光學(Fourier optics)原理,此系統能夠 以式 2-8 表示: Eq.2-8 其中 為物帄面振幅分布函數, 為像帄面振幅分布函數, 為
點擴散函數(Point spread function),點擴散函數的表示如式 2-9:
Eq.2-9
p(x,y)為孔徑函數(Pupil function),由式 2-9 可得知,點擴散函數為孔徑函數做富氏轉 換。而若再將點擴散函數做富氏轉換,則得式 2-10,即振幅傳遞函數(ATF, Amplitude transfer function),並且能夠推算出光學傳遞函數(OTF, Optical transfer function)如式 2-11:
Eq.2-10
Eq.2-11
16 function)。 以 MTF 判斷成像品質的好壞是最直接的方式,因為 MTF 代表了鏡頭成像的對比度 與清晰度高低,可直接反應所有像差綜合對成像品質的影響。換句話說,MTF 為一種 測詴鏡頭成像反差對比度及銳利度的評估方式,也是分析鏡頭的解像力跟反差再現能力 使用的量化方式。一般在做 MTF 的評估時,我們可直接將 MTF 簡化為對比度的差異, 如式 2-12。 Eq.2-12 上式 Imax 強度最大值;而 Imin 為強度最小值,對於物體來說對比度 MTF 為 1,代表線 條由純白與純黑構成。以繞射極限(Diffraction limit)為標準,繞射極限是指在以傳統 光學量測方法觀看兩個東西時,如果它們之間的距離比大約 光波波長還短,就會因為 光波繞射極限而無法辨識[17]。此種測定光學頻率的方式是以一釐米的範圍能呈現出多 少對線來度量,其單位為 。圖 2.9 為 USAF 1951 MTF 測詴圖卡,可看出在不同 的區塊有不同的空間頻率[18]。
圖 2.9 USAF 1951 Test Chart
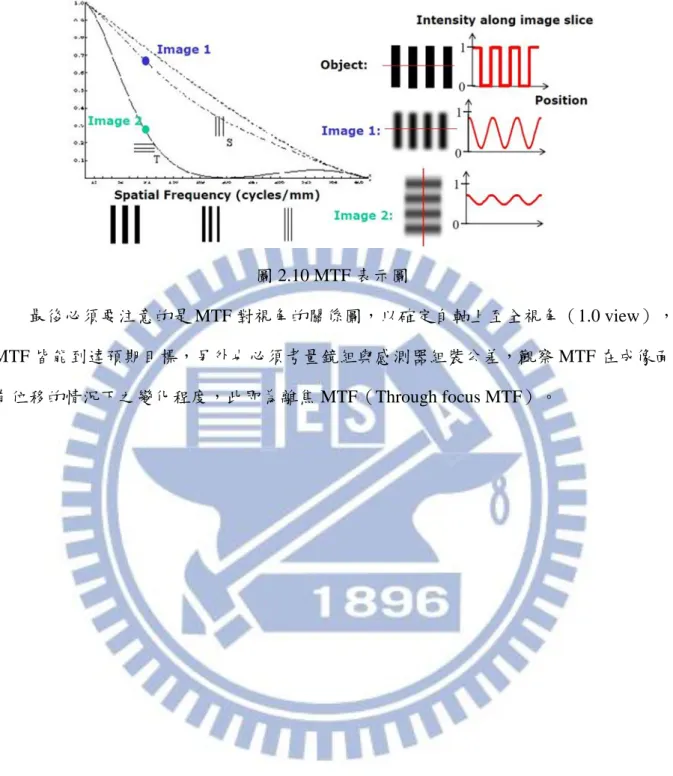
圖 2.10 為一 MTF 的表現例子,圖左為 MTF 的曲線圖,縱軸是對比度,橫軸為空 間頻率,可觀察低空間頻率至高空間頻率,線條分布密度的變化。通常我們檢視 MTF 會分成縱向(Tangential)與橫向(Sagittal, or Radial)。圖右為對應之像的強度[19]。
17
圖 2.10 MTF 表示圖
最後必頇要注意的是 MTF 對視角的關係圖,以確定自軸上至全視角(1.0 view), MTF 皆能到達預期目標,另外也必頇考量鏡組與感測器組裝公差,觀察 MTF 在成像面 有位移的情況下之變化程度,此即為離焦 MTF(Through focus MTF)。
18
第三章 基本原理介紹
3.1 光學滑鼠操作原理
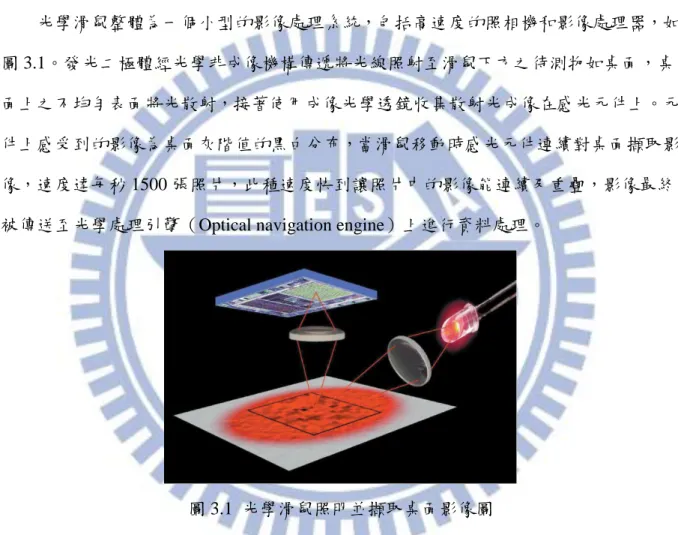
自安捷倫公司(Agilent Technologies)於 1999 年發布 IntelliEye 光學引擎後,至今 光學滑鼠的基本操作及定位技術已臻成熟,於是在此章節便藉由安捷倫公司 2001 年發 表之技術報告”Optical Mice and how they work”簡述光學滑鼠基本操作原理。[20] 光學滑鼠整體為一個小型的影像處理系統,包括高速度的照相機和影像處理器,如 圖 3.1。發光二極體經光學非成像機構傳遞將光線照射至滑鼠下方之待測物如桌面,桌 面上之不均勻表面將光散射,接著使用成像光學透鏡收集散射光成像在感光元件上。元 件上感受到的影像為桌面灰階值的黑白分布,當滑鼠移動時感光元件連續對桌面擷取影 像,速度達每秒 1500 張照片,此種速度快到讓照片中的影像能連續及重疊,影像最終 被傳送至光學處理引擎(Optical navigation engine)上進行資料處理。
圖 3.1 光學滑鼠照明並擷取桌面影像圖
資料來源: Agilent’s Data Sheet” Optical Mice and how they work” page2
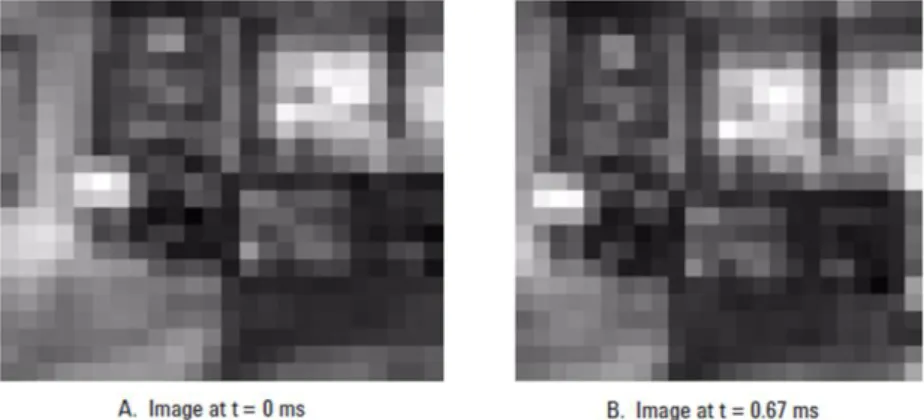
光學處理引擎如同滑鼠之大腦,能夠辨識影像之特徵以及追蹤其移動,如圖 3.2。 兩張影像隨著滑鼠往右上角移動而依序拍攝,可於下圖清楚看出大致上相似的輪廓。經 由影像處理的演算法辨識影像後,光學處理引擎便可辨別此兩張影像之相關性以及相對 距離,接著把資訊轉成 X-Y 座標系統以指出滑鼠的移動。
19
圖 3.2 光學引擎辨識影像圖。影像 B 為影像 A 之後拍攝,可觀察有許多共同的圖樣往 左下方移動
資料來源:Agilent’s Data Sheet” Optical Mice and how they work” page3
3.2 CMOS 影像感測器元件
3.2.1 CMOS 影像感測器元件簡介
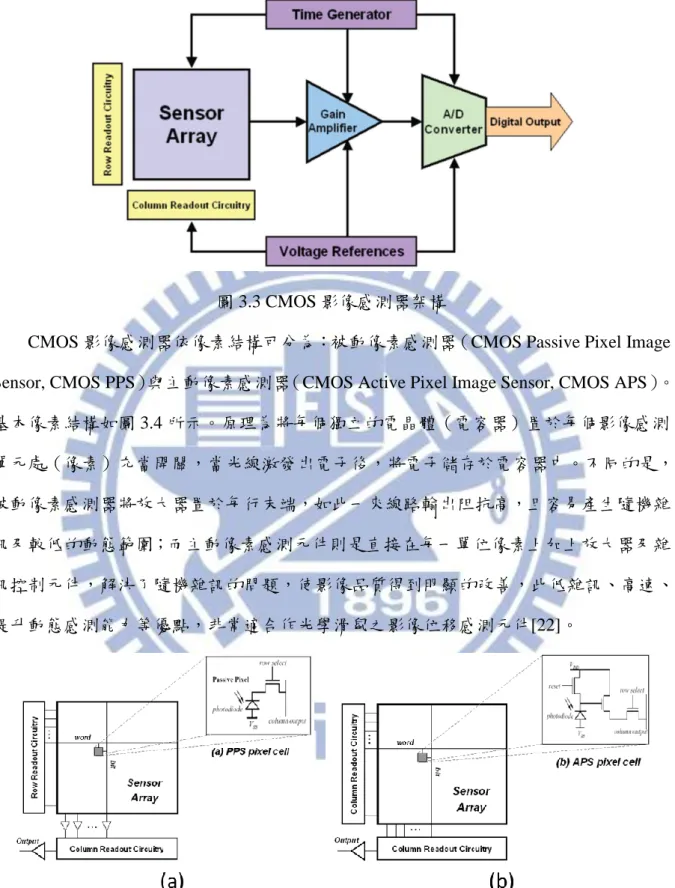
以 CMOS(Complementary Metal-Oxide Semiconductor)為影像感測器的構想早在 1968 年便被提出來,不過由於當時光蝕刻(Photolithography)技術未成熟,並未開發出 有實用價值的感測器。直到 1990 年代初期,次微米半導體製程技術成熟,才又使得 CMOS 影像感測器得到注目[21]。CMOS 影像感測器是由陣列式的感光像素(Pixel cell)所構 成,像素是 CMOS 影像感測器的基本單位,其包含一個光二極體,用來產生與入射光 成比例的電荷,也包含一些電晶體,以提供緩衝轉換和復位功能。像素電容累積的電荷 被抽樣緩衝傳送給放大器(Gain Amplifiers)與類比/數位轉換器(A/D Converter) 之 後,攝取影像之原始訊號才得以形成,由這些功能構成一組 CMOS 影像感測器,如圖 3.3[22]。
20
圖 3.3 CMOS 影像感測器架構
CMOS 影像感測器依像素結構可分為:被動像素感測器(CMOS Passive Pixel Image Sensor, CMOS PPS)與主動像素感測器(CMOS Active Pixel Image Sensor, CMOS APS)。 基本像素結構如圖 3.4 所示。原理為將每個獨立的電晶體(電容器)置於每個影像感測 單元處(像素)充當開關,當光線激發出電子後,將電子儲存於電容器中。不同的是, 被動像素感測器將放大器置於每行末端,如此一來線路輸出阻抗高,且容易產生隨機雜 訊及較低的動態範圍;而主動像素感測元件則是直接在每一單位像素上加上放大器及雜 訊控制元件,解決了隨機雜訊的問題,使影像品質得到明顯的改善,此低雜訊、高速、 提升動態感測能力等優點,非常適合作光學滑鼠之影像位移感測元件[22]。 圖 3.4 (a)被動像素感測器架構 (b)主動像素感測器架構
21
3.2.2 CMOS 影像感測器位移與方向偵測方法
動態影像中每一個畫面都是由一連串像素之灰階值所組成,灰階值為射入影像經影 像處理器作量子化後以 0 及 1 作二進位編碼(binary coding),一般採用 256 個圖素(picture cell),每個畫素採 6 位元調製值,最亮處以 111111 表示,而最暗處用 000000 表示, 如圖 3.5。[23] 圖 3.5 (a) 畫素位址地圖 (b) 以”白紙”為待測物所感應的調階值 由上述可知,動態影像位移是由一連串連續時間的靜態畫面組合而成,而每一張畫 面在連續的時間軸上通常都有兩個特性:(a) 朝同一方向持續移動的趨勢與(b) 相鄰時間 中畫面上圖案的差異性不大。如上圖 3.2 所示。依這兩個特性,若能找到畫面上的圖案 在時間軸上移動的方向,則影像位移感測器僅需要紀錄圖案移動的方向以及將同一圖案 中在時間軸上有變化的部分加以編碼計算ΔX 與ΔY 位移。以同一圖案在連續時間軸上 差異值來作位移的評估與預測的方法稱作「動態預測法」(Motion estimation)[22]。另 外基於減少感測器的計算複雜度、紀錄動態向量數目及提升動態預測效率考量下,亦有 提出將每張畫面切割成數個 像素的區塊(block)且每一區塊都被當成獨立圖案,
如圖 3.5。此種以區塊為動態預測的方式又稱「區塊動態預測法」(Block motion estimation) [24]。
22 圖 3.6 區塊動態預測法示意圖 圖 3.6 之區塊動態預測法是取前一個圖像(frame)中間之 像素位置(Position 0)當參考圖像(reference frame),接著將前一個參考圖線和目前擷取到的圖像(current frame)進行區塊比較的影像處理,看看哪個位置的區塊(Position 1~8)和參考圖像的 區塊最像,便可得知移動方向並計算出相對位移距離。[22][24]
3.3 CMOS 影像感測器元件-PAW3204DB
本論文預計採用由原相科技公司(PixArt Imaging Inc.)研發生產之低功率無線滑鼠 感測器,型號為 PAW3204DB。選擇此感測器的原因主要是由於筆型滑鼠為使操作方便 自然,故無線感測器較為適合,此外便是追求低功耗,高傳輸速率為佳,接下來幾小節 將會針對此感測器作詳細的介紹。 3.3.1 PAW3204DB 感測器規格[25] PAW3204DB CMOS 光學滑鼠感測器有下列特點: 單電源供應 具完整 2-D(ΔX;ΔY)位移感測能力 於各種表面皆能正確位置偵測估算 高位移速率偵測達 28 inches/sec
23
高解析能力達 1600 CPI(Count per inch)
內含編譯與檔案轉換之序列介面(Serial interface) 無偵測到位移時進入省能模式
內建低耗能的時間計時器(Low Power Timer, LPT)以用於睡眠模式 建立 MOTSWK pin 以用於轉換睡眠/操作模式
內建 LED 光源驅動電路
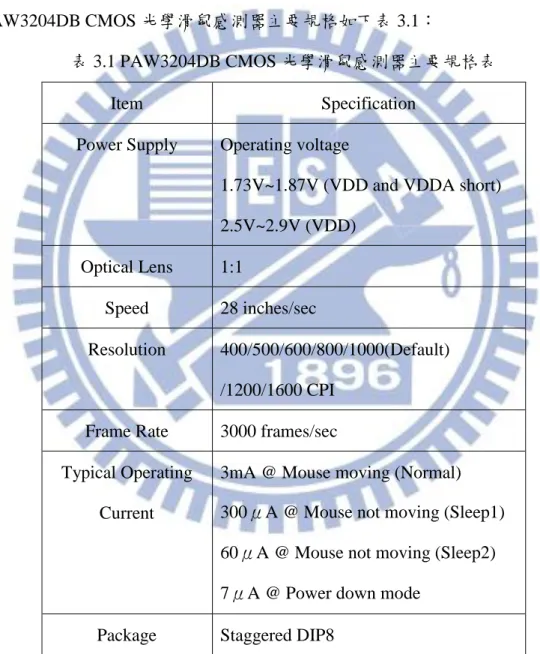
PAW3204DB CMOS 光學滑鼠感測器主要規格如下表 3.1:
表 3.1 PAW3204DB CMOS 光學滑鼠感測器主要規格表
Item Specification
Power Supply Operating voltage
1.73V~1.87V (VDD and VDDA short) 2.5V~2.9V (VDD)
Optical Lens 1:1
Speed 28 inches/sec
Resolution 400/500/600/800/1000(Default) /1200/1600 CPI
Frame Rate 3000 frames/sec Typical Operating
Current
3mA @ Mouse moving (Normal) 300μA @ Mouse not moving (Sleep1) 60μA @ Mouse not moving (Sleep2) 7μA @ Power down mode
Package Staggered DIP8
24 圖 3.7 PAW3204DB 感測器內部功能區塊圖 3.3.2 PAW3204DB 感測器重要參數 評斷光學滑鼠感測器性能的方式,主要有三大重點: 1. 影像擷取速度(Frame rate) 又稱內部採樣率、掃描頻率、拍照速率……等,是對滑鼠光學系統影像採樣能力的 描述參數,單位通常以 FPS(Frames per second)表示,亦在掃描器應用以赫茲(Hz) 表示。工作原理為:當 LED 光源照射工作表面,位移感測器以一定的頻率捕捉工作 表面反射的快照(Snapshot),由影像位移演算引擎(Navigator Engine)分析和比較 這些快照的差異,從而判定滑鼠移動的方向和距離。影像擷取速度的高低決定了圖 像的連貫性好壞以及對微小移動的響應,擷取速度越高則在越短的時間內影像處理 分析的次數越多,於是獲得的資訊越充分、圖像越連貫,表現在光學滑鼠的操作上 則是反應更敏捷、準確和帄穩,並且對任何細微的移動都能作出響應。[22] 2. 位移解析度(Resolution)
解析度的單位一般以 dpi(dots per inch, 每英吋點數)來表示,不過實際上以 cpi(count per inch, 每英吋測量次數)為單位較為適當。解析度影響兩個層面:當解析度上升 時,由於單位距離中的測量次數增加,所以第一是精準度隨之上升,第二點是相對 的在使用滑鼠時,實際移動距離則會縮短。在較高螢幕解析度下使用時,會比較容 易感受到解析度上升的效果,這代表來回移動滑鼠游標時,不需要大幅度移動滑鼠。 [22]
25 3. 移動速度(Motion speed) 在相同的距離之下移動所需的時間越短則速度越快。我們可以此項標準來定義光學 系統之感光像素大小,比如以表 3.1 所示之解析度列表取一較帄均的 800cpi 解析度, 在此規格標準下,必頇滿足移動距離一英吋而得到 800 次數(counts)的計算,則感 光像素大小如式 3-1 計算,不得大於 30μm,才能偵測到一次(a count)的位移。於 是我們在後面章節便定義光學系統的像素大小為 。[22] Eq.3-1
26
第四章 筆滑鼠之成像系統光學設計
4.1 導論
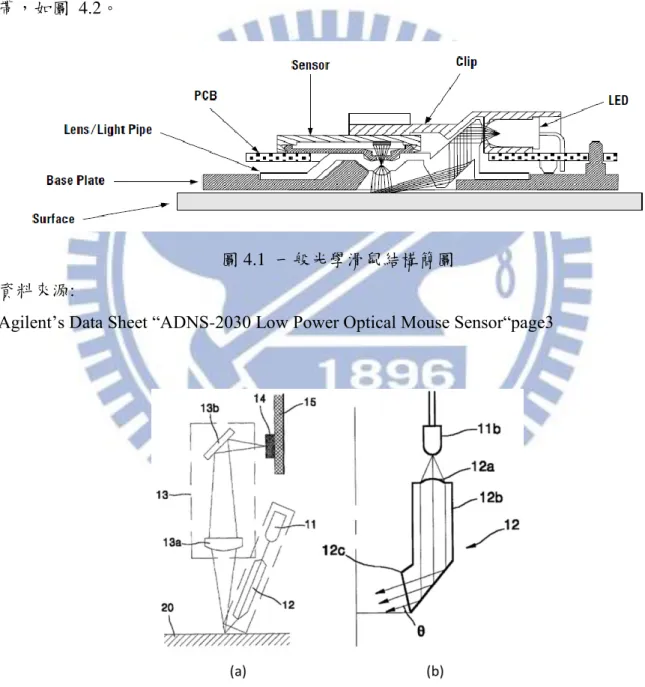
筆滑鼠整體機構與光學滑鼠類似,主要由發光二極體(Light-Emitting Diode)、偵 測感光元件(Detector sensor)、透鏡(Lens)、印刷電路板(Print Circuit Board)及塑 膠底座載板所組成,如圖 4.1 所示。差異在於筆滑鼠將機構縮減至筆的形狀,以便於攜 帶,如圖 4.2。
圖 4.1 一般光學滑鼠結構簡圖 資料來源:
Agilent’s Data Sheet “ADNS-2030 Low Power Optical Mouse Sensor“page3
圖 4.2 筆滑鼠結構簡圖。(a) 為主要結構圖,發光二極體(11)經光導(12)射出均勻光線於 桌面(20),接著經光學成像系統(13)成像至感光元件(14),以感應方位。(b) 為發光元件 構造(11b 為發光二極體,12 為光導)
27
資料來源:
US Patent 7098894, “Pen Type Optical Mouse Device and Method of Controlling the Same”, Hoing-Young Yang, Seung-Gol Lee
為了省電,近年來亦有業者陸續使用表面黏著型發光二極體(SMD LED, Surface Mounted Device LED),此發光元件於 1980 年初期出現,主要因應更小的封裝以及工 廠自動化而生[26]。於是在本論文的設計中,發光元件便以表面黏著型發光二極體進行 設計。在光學系統的設計中,首先先依需求設定規格,利用光學軟體 Code V 進行光學 設計與分析[27][28],將所設定的規格,利用指令寫入巨集對鏡組進行優化[29],達到品 質要求之後,最後進行公差分析,評估所有組裝與製造因素對成像品質的影響,並加以 訂定鏡組中各元件之公差容忍值。
4.2 設計規格
在設計鏡頭時,規格的選定相當重要,所謂綱舉目張,確定規格時,必頇確認兩件 要素:「能否看得見?」、「能否看得清楚?」。 4.2.1 能看得見 像要能夠被攝入,首當其衝便是照度的問題,所有光學系統都是針對成像接受面所 做的設計,因此先選定成像面的規格。一般常見的感光元件有 CMOS 與 CCD 兩類,粗 略來看,感光度 CCD 較優,焦比(f-number)選定大致落於 2.8 左右;而 CMOS 感光 度較差,焦比(f-number)的選定大致落於 3~4 間,基於感光度的限制,在主光線角度 的要求上,CMOS 的角度也較 CCD 來得有限制。針對 CCD 與 CMOS 的優缺點做比較, 如表 4.1[30],考量優缺點與目前趨勢選擇 CMOS Sensor-PAW3204DB 為成像感測面, 規格如表 4.228 表 4.1 CCD 與 CMOS 優缺點比較 感光元件類型 優點 缺點 CMOS 低價位、低耗電量、畫 素可隨機讀取。 雜訊度較高、光感度較差、 晶片線路複雜、技術尚未完 全成熟 CCD 低雜訊、高感度、線路 設計及製程單純、技術 成熟。 高耗電量、畫素無法隨機讀 取、電荷傳遞要求較高 表 4.2 鏡頭選定之 CMOS 規格 項目 規格 感光元件型式 PAW3204DB(CMOS) 單一畫素大小 30μm × 30μm 有效面積 0.48mm × 0.48mm 4.2.2 能看得清楚 欲使物體成像看得清楚,務必將像帄面放置在焦帄面上。然而由於考量使用者在使 用筆滑鼠的方便性,此光學系統的景深容忍度必頇至少達 6mm。 決定好接收面規格以後,接著決定鏡頭之光學成像品質標準。 1. 像高(Image height) 由於 CMOS 感光元件有效面積為 0.48mm × 0.48mm,由此可求得對角線的長度為 ,在考量製作公差下,取對角線長度至 1.0mm,推得鏡頭 所需設計之像高為 1.0mm/2 =0.5 mm,也就是此 CMOS 感光元件最大成像圈的大小。 2. 光瞳規格(Pupil specification) 光瞳規格的選定一般決定了入射/出射光線的數量,一般而言選定焦比(f-number),
29
即有效焦距(EFL, Effective focal length)與入瞳直徑(Clear aperture diameter)的比。 但在這個設計裡,像高固定,我們取有效物高,以放大率(Magnification)進行設計, 於是在光瞳規格的選定為物體數值孔徑(ONA, Object numerical apeture),並在優化 時下優化運算元指定對應之 f-number。
3. MTF(Modulation transfer function)
由於所選擇的 CMOS 感光元件之畫素大小為 30μm × 30μm,並且考慮發光二極體為 單一波長光源,因此可以計算得知系統最高之空間頻率為 , 但在設計上亦必頇考慮公差,於是要求 MTF 在高空間頻率 25lp/mm 必頇在 20%以上。 4. 光學畸變(Distortion) 光學畸變在所有視角皆小於 5%。 5. 景深(Depth of field) 景深頇達 6mm。 圖 4.3 景深示意圖 景深的概念建立在對於光學系統離焦點產生的模糊點有足夠容忍度的假設上;而超 焦距離指的是在此距離內,光學系統必可視為對焦(亦為景深延伸至無限遠處)[31]。 在設計時我們可將超焦距離納入起始設計: Eq.4-1 其中 Dhyp為系統可視為對焦的距離(對應至光學系統物距)、A 為鏡頭入射光瞳之 直徑、f 為鏡頭焦距長以及 B 為可接受的模糊點(Blur)直徑,如圖 4.3。由式 4-1 B fA Dhyp
30 可推估,假若景深要夠長,則物距必頇也要夠長。值得一提的是,上述假設皆以” 完美成像”作假設,只適用於起始設計時光學鏡頭形式的選定。 6. 系統長度(Total length) 系統長度控制在 50mm 以內。 7. 材質(Material) 使用塑膠材質,一般而言考慮成本皆使用聚碳酸酯(PC, Polycarbonate)。 整理規格如表 4.3 表 4.3 筆滑鼠成像光學規格表 I 物空間 項目 規格 備註 I-1 物距(object distance) 32-35-38mm 景深達 6mm II 光學系統 II-1 f-number 4.2-3.4-2.8 II-2 畸變(distortion) < 5% (<3%) II-3 系統全長 (TTL) <50mm 自物體至成像面 II-4 鏡頭孔徑 2~3mm II-5 結構 2P PMMA or PC III 像空間 (感光元件) III-1 畫素大小 30um B/W MTF 截止頻率(cut-off frequency) 16.67 lp/mm → >0.2 @25lp/mm III-2 成像孔徑 0.68mm → 0.88mm~1.0mm 像高→0.44~0.5mm
31
4.3 設計流程
設計流程如圖 4.4 表示 圖 4.4 設計優化流程圖4.4 優化方式
此項光學設計的關鍵在於景深的範圍,目標在物距 32-35-38mm 時,MTF 皆有好的表現, 於是利用光學軟體 Code V 內的組態設定,加強中心組態(物距為 35mm)。優化運算 元設定像高、系統總長、畸變以及基本鏡間距;變數為透鏡曲率、透鏡厚度,並開放非 球面係數下去進行優化。如表 4.4 表 4.4 優化運算元與限制 變數 備註 曲率(Curvature) 厚度(Thickness) 非球面係數(Aspheric coefficients) 至 14 階32
優化運算元 限制
最小軸上空氣間隙
(Minimum axial air spacing) 0.05mm 最小邊緣厚度(Minimum
edge thickness) 0.14mm 最大空氣邊緣間隙
(Maximum air edge separation) 0.0025mm 鏡面總長(第一面至成像 面) <6mm 第一組態(物距 30mm)像高 >-0.53mm <-0.5mm 畸變(所有組態) >-0.03 <0.03 根據優化運算元鍵入 Code V,並自行寫巨集指令(Macro)(如附錄一)。在優化的過程 中,需反覆注意鏡片形狀與成像品質的變化,以針對限制條件做調整,必頇經過多次嘗 詴,才能設計出符合規格的鏡組。
33
4.5 設計結果
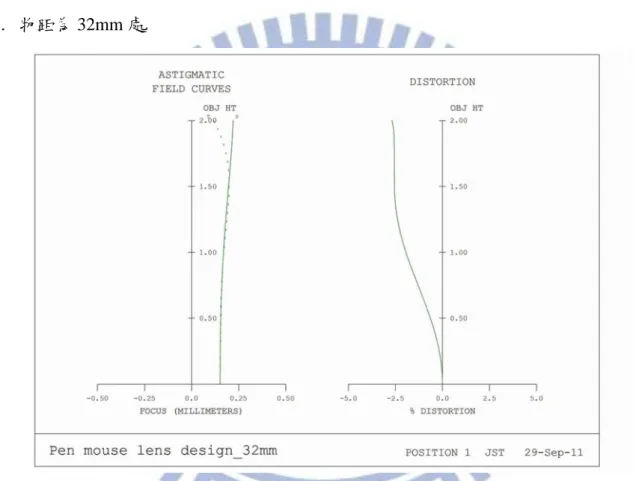
完成優化後,設計結果如圖 4.5。並將目標值與設計值做比較如表 4.5。 圖 4.5 設計結果。左為鏡片配置圖,由上往下依序為物距 32、35、38mm 的組態;右圖 為一階資料 表 4.5 訂定規格與設計值結果比較 I 物空間 項目 規格 設計值 I-1 物距(object distance) 32-35-38mm 32-35-38mm II 光學系統 II-1 f-number 4.2-3.4-2.8 4.14-3.34-2.80 II-2 畸變(distortion) < 5% (<3%) <3% II-3 系統全長 (TTL) <50mm 44mm II-4 鏡頭孔徑 2~3mm 2.67mm II-5 結構 2P 2P III 像空間 (感光元件) III-1 MTF >20% (@25lp/mm) 於 25lp/mm 處皆 超過 20%;中心組 態甚至達 49.5% III-2 像高 0.44~0.5 mm -0.50mm -0.46mm -0.42mm34 觀察上表,可觀察設計值皆符合規格要求。對於滑鼠,光源成像至感光元件並非為了成 像,於是畸變程度並不會影響太大,但仍控制在 3%以內;在 MTF 的表現上,即使兩側 組態較弱,亦已達成像標準,在規格之內。 4.5.1 成像性能評價 此小節將會列出本設計的光學品質表現結果,並且最後給予討論說明。 1. 物距為 32mm 處
35
圖 4.7 物距 32mm-畸變格線圖(distortion grid)
36
圖 4.9 物距 32mm-MTF 曲線圖
37
2. 物距為 35mm 處
圖 4.11 物距 35mm-像散、場曲與畸變曲線圖(astigmatism field curve and distortion curve)
38
圖 4.13 物距 35mm-光斑圖(spot diagram)
39
圖 4.15 物距 35mm-Ray aberration 圖 3. 物距為 38mm 處
40
圖 4.17 物距 38mm-畸變格線圖(distortion grid)
41
圖 4.19 物距 38mm-MTF 曲線圖
42
像散、場曲與畸變圖(Astigmatism field curve and distortion curve)表示出鏡頭的場 曲情形以及成像的畸變狀況,在像散、場曲圖中,實線代表矢狀切面(sagittal plane) 在各場點的焦點分布;虛線則代表正切切面(tangential plane)的各場點焦點分布,實 線與虛線愈接合,則說明此鏡頭像散情形不明顯。由位於不同物距的像散、場曲圖(圖 4.6, 4.11, 4.16)可觀察出此鏡頭像散情形不嚴重。由畸變圖則可觀察不同組態在各場點 的畸變量,最高達-2.67%,在所有變焦組態的光學品質皆達到標準,說明畫面形變程度 是可以被人眼所接受的。 畸變格線圖(Distortion grid)則能夠看出在實際成像情況與理想成像情況的差異, 黑線為近軸理想成像面,紅線則是實際成像面,由兩者差異量可觀察此畸變的類型為桶 形畸變(Barrel distortion),物距較近時,畸變程度較大,然而大致亦可在感光元件上 辨識(<5%)。 光斑圖(Spot diagram)可觀察在不同場點的光斑情形,看彗差(Coma)情形是否 嚴重。 而MTF曲線圖,包括對不同視場角與空間頻率作圖。此鏡組在中間組態(物距為 35mm,如圖4.14)與所有視角的MTF 值在空間頻率為25 lp/mm 時,MTF 都可以大於 45%,兩側因為離焦的緣故,於是較為下滑,然而MTF成像品質仍是能被接受的,這點 在之後的公差分析會加以說明。此圖同時也可以顯示出所有組態位置在所有視角(除了 物距30mm處的最外視角),MTF徑向與切向的差值皆在20%之內,也就表示在成像的 情況不會產生正切(tangential)方向與矢切(sagittal)方向成像清晰度差異過大。 Ray aberration 圖表示為在X和Y方向,光線像差與入瞳XY 座標的關係。由於比例 尺度為 0.07,於是像差情形仍在接受範圍之內。
43
第五章 公差分析
5.1 公差介紹
光學成像系統被設計出來之後,必頇考慮到真實生產時的製造情形、實際組裝時機 構模組件的構造與應用端的使用者需求,這些都會影響到光學成像品質。考慮上述因 素,於是必頇先模擬公差分析,由結果可分析此光學系統在不同公差範圍的品質優劣狀 況,這些分析的目的都在於減少之後的來回測詴次數,以降低生產成本。以本論文設計 的產品為例,一個好的設計必頇考慮到成像品質在使用上的公差容忍度,以及合乎成本 效益下關於製造、組裝上的公差容忍度。 本論文公差模擬使用光學軟體 CODE V 作分析與評估,其中定義了中心公差 (centered tolerances)和偏心公差(decentered tolerances)兩種[32]。5.2 鏡組公差分析
5.2.1 公差範圍決定 鏡組設計完成之後,基於實際製造與組裝的考量,必頇給予其一有效公差容忍範 圍,也就是說在此公差容忍範圍之內,成像品質皆能夠達到規範標準。公差範圍的給定 基本上來自於製造機台的製造公差,以及生產線上的組裝公差。公差範圍若訂定太嚴或 太鬆,則無法有效確認成像品質。一般而言,製造公差為 ;而組裝公差在 之間。 在光學軟體 CODE V 使用公差分析,必頇先鍵入每一項公差的合理範圍〈如表 5.1〉,而評斷方式以 MTF 的降低量作根據,因為 MTF 為所有像差的綜合表現,於是 由 MTF 的降低量來得知整體成像品質的情況大致合理客觀。 以本論文而言,考量適當的公差分析後,生產良率(cumulative probability)為 97.7% (2σ,兩個標準差)時必頇達 0.2(20%)以上,以確定量產上鏡頭能保持高光學成像 品質。另外由於本實驗針對光學系統的景深作分析,給予三個組態分別為前組態(front44
zoom,物距 32mm 處)、中組態(middle zoom,物距 35mm 處)以及後組態(rear zoom, 物距 38mm 處)。此實驗並非變焦系統,於是無位移補償來維持 MTF,故離焦面的成 像品質勢必會下降,所以在公差分析的討論上,主要針對中組態,也就是焦帄面位置的 成像品質進行討論分析。 表 5.1 公差類型分類與規格 公差 (Tolerance) 項目 規格 中心公差 Centered tolerance
Test plate Fit 2.0 fringes (λ) Radius delta 0.02 mm Thickness delta 0.02 mm
Refractive index delta 0.002 Abbe's number: 0.8%
Irregularity 1.0 fringes (λ) 偏心公差
Decentered tolerance
Element tilt 1 arc min Element wedge 1 arc min Element decenter 0.01 mm
5.2.2 公差模擬結果
以像帄面位置為補償面(compensator),對光學系統的成像品質做機械式補償,在 各組態的公差分析結果如圖 5.1 至圖 5.3 與表 5.2 至表 5.4。
45 圖 5.1 鏡頭在物距為 32mm,空間頻率取至 25lp/mm 時的公差分析結果。左圖為正切 (tangential)各場點分布情形;右圖為橫向(radial)各場點分布情形 表 5.2 鏡頭在物距為 32mm,空間頻率取至 25lp/mm 時,良率在 97.7%(2σ)之公差分 析結果 鏡頭在物距為 35mm 時的公差分析結果 圖 5.2 鏡頭在物距為 35mm,空間頻率取至 25lp/mm 時的公差分析結果。左圖為正切 (tangential)各場點分布情形;右圖為橫向(radial)各場點分布情形
46 表 5.3 鏡頭在物距為 35mm,空間頻率取至 25lp/mm 時,良率在 97.7%(2σ)之公差分 析結果 鏡頭在物距為 38mm 時的公差分析結果 圖 5.3 鏡頭在物距為 38mm,空間頻率取至 25lp/mm 時的公差分析結果。左圖為正切 (tangential)各場點分布情形;右圖為橫向(radial)各場點分布情形 表 5.4 鏡頭在物距為 38mm,空間頻率取至 25lp/mm 時,良率在 97.7%(2σ)之公差分 析結果
47
5.2.3 公差結果分析與說明
公差分析圖縱軸為生產良率,橫軸為 MTF 值,不同顏色分別代表不同視場角的公 差結果,分成橫向(radial)與縱向(tangential)。
由結果可看出在前組態(front zoom,物距在 32mm 處)與後組態(rear zoom,物 距在 38mm 處)時,因為已偏離焦帄面,於是 MTF 值都降至幾乎為零,其中縱向切面 的公差結果比橫向切面稍微較好一些。在中間組態,也就是物距在 35mm 處時,MTF 值在 25lp/mm 時皆在 20%以上,表示在公差範圍之內皆有良好的成像表現。另外在前後 組態雖然 MTF 值皆掉至幾乎為零,然而若是考慮感光元件的截止頻率 16.67lp/mm,則 可望到達 20%,如圖 5.4~圖 5.6 與表 5.5~表 5.7 所示,僅僅在物距為 38mm 處之軸向 公差容忍度不足 20%,其餘皆有良好的品質表現;綜合上述討論,此光學成像系統尚可 滿足此公差範圍。 圖 5.4 鏡頭在物距為 32mm,空間頻率取至 16.67lp/mm 時的公差分析結果。左圖為正切 (tangential)各場點分布情形;右圖為橫向(radial)各場點分布情形
48 表 5.5 鏡頭在物距為 32mm,空間頻率取至 16.67lp/mm 時,良率在 97.7%(2σ)之公差 分析結果 圖 5.5 鏡頭在物距為 35mm,空間頻率取至 16.67lp/mm 時的公差分析結果。左圖為正切 (tangential)各場點分布情形;右圖為橫向(radial)各場點分布情形 表 5.6 鏡頭在物距為 35mm,空間頻率取至 16.67lp/mm 時,良率在 97.7%(2σ)之公差 分析結果
49
圖 5.6 鏡頭在物距為 38mm,空間頻率取至 16.67lp/mm 時的公差分析結果。左圖為正切 (tangential)各場點分布情形;右圖為橫向(radial)各場點分布情形
表 5.7 鏡頭在物距為 38mm,空間頻率取至 16.67lp/mm 時,良率在 97.7%(2σ)之公差 分析結果
50
5.3 使用端公差分析
5.3.1 傾斜角公差項說明與結果 上述公差分析大致為製造、組裝之公差分析,然而在筆滑鼠的使用上,筆滑鼠的傾 斜角度為更加重要之公差項。因為筆的傾斜,會使得光源(SMD LED)投影之斑點物 帄面傾斜而影響像帄面之成像品質〈如圖 5.4〉,為了單獨討論此項公差,本節以紀錄 並畫出不同傾斜角於各 MTF 值之最低情形的圖表來分析討論。結果如圖 5.5 至 5.7 圖 5.7 傾斜角度在 CODE V 上的 2D 模擬圖 圖 5.8 物距為 32mm 處之各傾斜角度與 MTF 曲線變化圖51 圖 5.9 物距為 35mm 處之各傾斜角度與 MTF 曲線變化圖 圖 5.10 物距為 38mm 處之各傾斜角度與 MTF 曲線變化圖 5.3.2 傾斜角公差結果分析 由圖 5.5 可觀察出,在物距為 32mm 處離焦情形嚴重,於是 MTF 最低值在空間頻 率約為 18lp/mm 處就幾乎降至 0.2 以下;在物距為 38mm 處亦同(圖 5.7)。 接著由圖 5.6 可觀察在中間組態,也就是物距為 35mm 處時,MTF 之成像品質皆在 40%以上,其中包含傾斜角較大的 。說明此筆滑鼠設計在傾斜角 的情況下, 皆能維持良好的光學成像品質。 最後確認在傾斜角度的情況下,造成所需透鏡孔徑的變化公差量,如表 5.5,在不 同傾斜角度,最大孔徑與最小孔徑差值為 2.7306mm-2.6158mm=0.1148mm。可得知兩點
52
關係:第一,傾斜角度 之間時,所需孔徑仍在第四章訂定的光學規格 3mm 以內;
第二,於兩個最大傾斜角度之間,所需孔徑需要有約 0.115mm 的容忍度。 表 5.8 不同傾斜角度時的最大孔徑表
Angle tolerancing max. lens aperture size Obj. tilt 0 deg 2.6652mm Obj. tilt +5 degrees 2.6776mm Obj. tilt -5 degrees 2.653mm Obj. tilt +10 degrees 2.69mm Obj. tilt -10 degrees 2.6404mm Obj. tilt +15 degrees 2.7028mm Obj. tilt -15 degrees 2.6276mm Obj. tilt +20 degrees 2.7164mm Obj. tilt -20 degrees 2.6158mm Obj. tilt +25 degrees 2.7306mm (maximum) Obj. tilt -25 degrees 2.6158mm (minimum)
53
第六章 機構件建立
6.1 機構件說明與規格訂定
光學鏡頭經設計優化、公差分析完成以後,接著頇考慮其餘機構件的部份。誠如前 述 3.1 節-光學滑鼠操作原理所敘述,光學滑鼠基本操作原理依序可粗略分成三個步 驟,如圖 6.1: 1. 光源(SMD LED)發光,經光導(Light guide)集中與傳播光線,使光線均勻 擴散至待測面。 2. 待測面(如桌面)之均勻擴散面便成一面光源,反射經光學鏡頭成像至感光元 件(sensor)。 3. 經感光元件之影像處理器做座標位移分析,輸出訊號至電腦。 圖 6.1 光學滑鼠機構件示意圖。成像步驟依序如上述 1、2、3 所示。a 為光源、b 為光 導、c 為待測面(桌面)、經 d 光學鏡頭成像、e 為印刷電路板,感光元件則嵌入至上 頭、f 為覆蓋玻璃;另外因考量成像物距公差,在模擬時定義三組接收面(receiver 1~3) 鑒於上述原理及應用端之使用者需求,可建立出本論文之機構件規格,如圖 6.2 所 示,規格並於本小節後頭各段作說明。54 圖 6.2 筆滑鼠機構件示意圖。(a) 為光學成像鏡組、(b) 為光導與環狀反射機構件、(c) 黑 件(筆滑鼠之外殼機構) 6.1.1 應用端之使用者需求說明 回顧成像鏡組之光學系統設計,再考量使用者需求,可歸納在應用端之使用者需求 如下,而這也將納入機構件的設計: I. 物距必頇有 32mm~38mm 之容忍度,也就是指第一面透鏡至物面頇達 32mm 以 上。 II. 筆滑鼠外殼機構截面直徑最多達 10mm。
6.1.2 光導(Light guide)與環狀反射體(Cone reflector)設計說明
光導(light guide)主要目的在於將光源(SMD LED)所發射之光線均勻打至光學 鏡頭之物面;而環狀反射體(Cone reflector)其實就是連結光導與成像鏡組之機構件, 然而我們能夠在這機構件上作些出光口的曲面設計,以提高出光亮度或者均勻度。由於 製程上的限制,光導與環狀反射體之機構件的長度最大值為 12mm。
55
6.1.3 黑件(Black cone reflector)說明
黑件主要是為了模擬光線自光導經過筆滑鼠機構外殼之情形而設立,簡單來說,黑 件也就是筆滑鼠之機構外殼,於本論文採用塑膠黑件,藉此要求機構表面對光的吸收率。 6.1.4 設計規格表與挑戰 由上述筆滑鼠設計機構件規格,加上第四章所附之光學成像規格整理成一完整規格 表如表 6.1 表 6.1 筆滑鼠完整規格表 I 物空間 項目 規格 備註
I-1 物距(object distance) 32-35-38mm 景深達 6mm II 光學系統 II-1 f-number 4.14-3.34-2.80 II-2 畸變(distortion) < 5% (<3%) II-3 系統全長 (TTL) <50mm 自物體至成像面 II-4 鏡頭孔徑 2~3mm II-5 結構 2P 材質:PMMA 或 PC III 像空間(感光 元件) III-1 畫素大小 30um B/W MTF 截止頻率 (cut-off frequency) 16.67 lp/mm → >0.2 @25lp/mm III-2 成像孔徑 0.68mm → 0.88mm~1.0mm 像高→0.44~0.5mm IV 照明與機構元 件 IV-1 鏡頭與感光元件承載具 ≦ 3-6mm 光學鏡頭 TTL~6mm
IV-2 光導(light guide)/環狀
反射體(cone reflector) ≦12mm