©2007 National Kaohsiung University of Applied Sciences, ISSN 1813-3851
包含變速型風力機與柴油引擎發電系統的分散式系統動態特性分析
陳泉合1、陳盟仁1、吳有基2、劉國才1、潘信志1 1國立高雄應用科技大學 電機工程系 2國立聯合大學 電機工程學系 E-mail: [email protected]摘 要
本研究主要在探討一個包含變速型風能發電系統與柴油引擎發電系統的分散式系統的動態特性。該系 統主要包括市電、風能發電系統、柴油引擎發電系統、三相變壓器、感應電動機、激磁系統、同步發電機、 以及靜態負載等。研究方法是先推導系統組件的數學模型,接著利用 SimPowerSystems 模組開發並依系統 架構連接,最後進行動態特性模擬與分析。研究結果顯示此系統在這兩種運轉模式下的動態特性是合理的 並且應可和實際運轉情形一致。本研究最大的價值是可做此類型系統規劃、運轉、以及擴充的重要參考。 關鍵詞:風能發電系統、柴油引擎發電系統、激磁系統、MATLAB/Simulink、SimPowerSystems1. 前 言
由於世界各國工業日益發達,過去五十年來,地球表面平均溫度的上升速度大約是過去100 年的兩倍。 過去100 年內,地球的表面平均溫度約升高 0.74℃。如果大氣中的二氧化碳濃度,超越工業革命前的兩倍, 這將會導致平均溫度會升高3℃。全球變暖最明顯的影響之一是海平面升高,在 20 世紀,海平面升高了大 約17 厘米。為了因應日趨嚴重的溫室效應,1997 年 12 月在日本京都制定了《京都議定書》,目前全球共有 180 多國簽署,其目標是「將大氣中的溫室氣體含量穩定在一個適當的水平,進而防止劇烈的氣候改變對人 類造成傷害」。2009 年年底,114 個國家通過了《哥本哈根協議》,這項協議的目的是為了讓開發中國家和 已開發國家都必須進行減少排放溫室氣體,並且要建立籌資機制來支持開發中國家減少溫室氣體排放[1]。 台灣由於天然資源和能源貧乏,約 99%的能源需仰賴進口,導致能源安全度偏低。石油、天然氣和煤 炭是目前國內能源需求的主要項目,因傳統高碳能源都來自國外,所以供應容易受到國際供需、價格波動、 產量變動、和國際能源政治角力的影響。為了因應氣候變遷和能源供應逐漸緊迫等議題,世界各國均積極 發展能源技術,唯有增加自產再生能源的使用比例,才能面對未來嚴峻的能源情勢。再生能源為具有潔淨、 低溫室氣體排放、取之不盡用之不竭的優點,例如太陽能、風力、潮汐能、地熱等,這幾年台灣也積極開 發再生能源,如太陽熱能、太陽光電、風力發電、生質能等綠色產業,以確保能源的穩定供應及有效提高 能源生產力,進而提升國家競爭力。根據經濟部能源局的規劃,再生能源的總裝置容量將在2025 年達到全 國裝置容量 15%,台電對此也進行再生能源的發展評估,其中太陽能、風能、小水力、生質能發電等均為 發展重點。到民國一百年為止,台灣再生能源(含慣常水力)裝置容量為 260.8 千萬瓦,佔系統裝置容量 6.3%,與經濟部能源局的規劃明顯還有相當大的成長空間[2]。 有關風能發電系統的相關文獻很多,除了有些書籍專門介紹風能發電系統的原理外,許多研究也針對 風能發電系統的各領域做深入的探討[3]-[5]。文獻[6]探討了在風能發電系統中,風力機定速與變速的優缺 點,並指出感應電動機使用繞線式轉子會比鼠籠式轉子有較高的功率輸出。文獻[7]指出使用適當的功因控 制器和增益比例,可增加雙饋式感應發電機的穩定性。文獻[8]提出在一定風速變動下,適當的葉片旋角控 制比起傳統PID 控制器,能更有效的調節風力機輸出功率。文獻[9]提出一個將獨立型風能-柴油混合式發電2. 包含風能發電系統與柴油引擎發電系統的分散式系統數學模型
2.1 系統架構
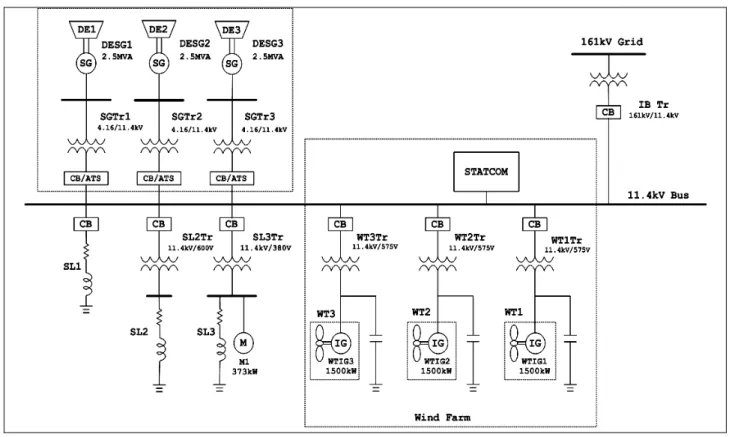
圖1 為包含風能與柴油引擎的分散式發電系統架構。此系統的組件包括市電系統(Grid)、變速型風能 發電系統(Wind Turbines)、柴油引擎(Diesel Engine)、同步發電機(Synchronous Generator)、激磁系統 (Excitation System)、變壓器(Power Transformer)、感應電動機(Induction Motor)、以及集總的靜態負載 (Lumped Static Load)。
圖1 包含變速型風力機與柴油引擎發電系統的分散式系統架構圖 2.2 風力機模組 風力機模組主要目的是將風能轉換成機械能來作為發電機的輸入。輸出的機械轉矩會隨著轉速、風速、 葉片角度的不同而有所改變。本研究設定的輸入風速為隨機風,額定風速為14m/s,葉片旋角起始角度為 0°, 此處不考慮葉片長度與空氣密度。圖 2(a)為風力機模組的圖像,輸入端為發電機轉速、葉片角度、風速, 輸出端為風力機機械轉矩。圖2(b)為內部架構圖[5],[12]。
(a)圖像 (b)內部架構 圖2 風力機組圖像與內部架構圖
2.3 三相感應發電機模組
三相感應發電機模組主要目的是將風力機的機械能轉換成電能。本研究使用之三相感應發電機轉子為 繞線式形式。
圖3(a)為三相感應發電機模組圖像,輸入端 Tm 為機械轉矩,輸出端 A、B、C 為定子側三相電壓,a、 b、c 為轉子側接點,m 為資料端,可連接到欲觀察的量測元件。圖 3(b)為參數視窗,此模組可依感應發電 機型式而設定不同的參數,包括機械輸入(Mechanical input)、轉子型式(Rotor type)、參考軸(Reference frame)、感應電機額定容量(Pn)、線電壓(Vn)、頻率(fn)、定子電阻(Rs)、定子漏電感(Lls)、轉子電 阻(Rr’)、轉子漏電感(Llr’)、磁化電感(Lm)、慣性常數(H)、機械阻尼係數(F)、極對(p)、以及初 始條件(Initial conditions)[13],[14]。 (a)圖像 (b)參數視窗 圖3 三相感應發電機圖像和參數視窗 2.4 三相變壓器模組 三相變壓器模組可選擇各種結線方式,包括 Δ-Δ、Y-Δ、Δ-Y、Y-Y、Yn-Δ、Δ-Yn、Yn-Y、Y-Yn 等幾 種。圖4(a)為三相變壓器模組圖像。輸入端 A、B、C 為變壓器一次側三相電壓,輸出端 a、b、c 為二次側 三相電壓。圖4(b)為參數視窗,此模組的參數包括額定容量(Pn)、頻率(fn)、一次側繞組線電壓(V1 Ph-Ph)、
(a)圖像 (b)參數視窗 圖4 三相變壓器模組圖像與參數視窗 2.5 柴油引擎模組 圖5(a)為柴油引擎模組圖像,輸入端為轉速參考值(wref)、轉速(wm)、電功率參考值(Pref)。輸出 端為機械功率(Pm)。圖 5(b)為模組內部架構,包含了控制器、促動器和引擎時間延遲等模組[15]。 (a)圖像 (b)模組內部架構 圖5 柴油引擎模組 2.6 同步發電機模組 圖6 為同步發電機模組圖像和參數視窗。輸入端 Pm 為原動機機械功率,Vf 為激磁電壓,輸入端 A、B、 C 為定子三相電壓,m_pu 為輸出資料端,可連接到量測元件。此內建模組可選擇轉子形式(Rotor type), 有圓型(Round)轉子和凸極式(Salient-pole)轉子可供選擇。輸入參數包括額定容量(Pn)、線電壓(Vn)、 頻率(fn)、定子電阻(Rs)、定子漏電感(Ll)、d 軸磁化電感(Lmd)、q 軸磁化電感(Lmq)、磁場電阻(Rf)、 磁場漏電感(Llfd)、d 軸阻尼電阻(Rkd)、q 軸阻尼漏電感(Llkd)、q 軸阻尼電阻(Rkql)、q 軸阻尼漏電 感(Llkql)、慣性常數(H)、轉軸阻尼係數(F)、極對(p)、和初始條件(Inititial conditions)[13],[14]。
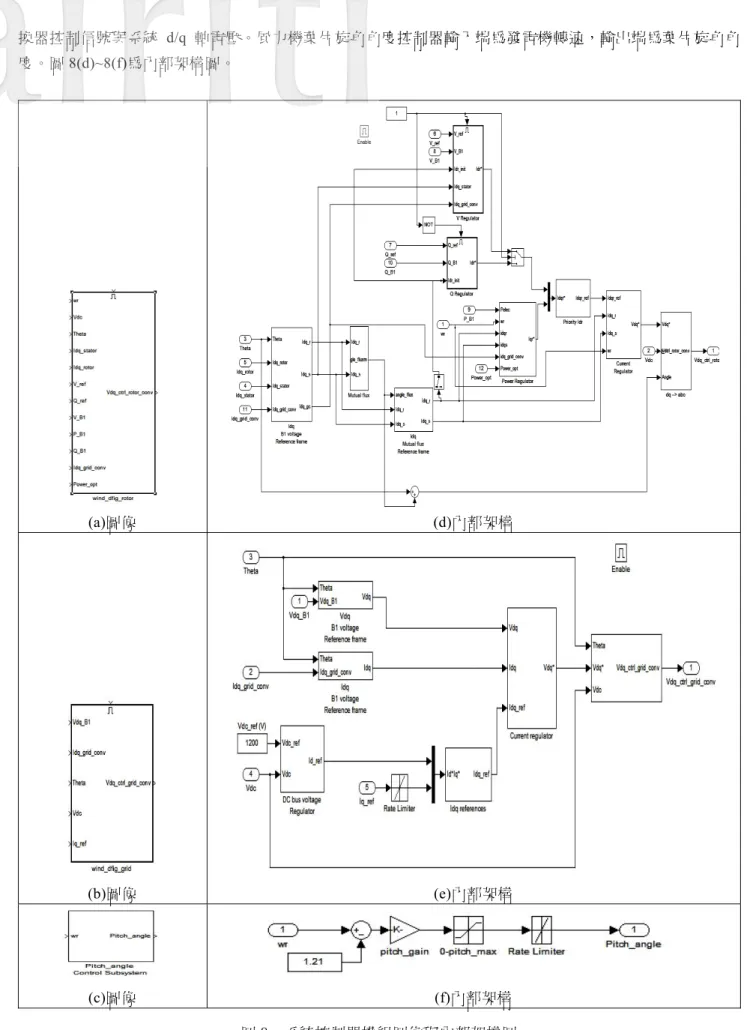
(a)圖像 (b)參數視窗 圖6 同步發電機模組圖像和參數視窗 2.7 激磁系統模組 圖7(a)為激磁系統模組圖像,輸入端分別為電壓參考值(vref)、d 軸電壓(vd)、q 軸電壓(vq)、穩定 器信號(vstab),輸出端為激磁電壓(Vf)。圖 7(b)為模組內部架構。此模組的參數包括低通濾波器時間常 數(Tr)、調節器增益(Ka)、調節器時間常數(Ta)、激磁機增益(Ke)、時間常數(Te)、暫態增益衰減常 數(Tb)和(Tc)、阻尼率波器增益(Kf)、時間常數(Tf)、調節器輸出限制(Efmax, Efmin)、調節器輸出 增益(Kp)和電壓初始值(Initial values)[16]-[18]。 (a)圖像 (b)內部架構 圖7 激磁系統模組 2.8 系統控制器模組 系統控制器模組主要目的是控制轉子側轉換器與市電側轉換器的閘極信號、以及風力機葉片旋角角 度。包含轉子側轉換器控制器、市電側轉換器控制器、以及風力機葉片旋角角度控制器三個部份。 圖 8(a)~8(c)分別為轉子側轉換器控制器、市電側轉換器控制器、以及風力機葉片旋角角度控制器模組 圖像。轉子側轉換器控制器輸入端為發電機轉速、直流電容器電壓、系統電壓鎖相後的相位角、定子電流、 轉子電流、參考電壓、參考虛功率、系統輸出電壓、系統輸出實功率、系統輸出虛功率、市電側轉換器輸 出電流,輸出端為轉子側轉換器控制信號[19],[20]。市電側轉換器控制器輸入端為系統電壓、市電側轉換器 輸出電流、系統電壓鎖相後的相位角、直流電容器電壓、市電側轉換器 q 軸參考電流,輸出端為市電側轉
(a)圖像 (d)內部架構
(b)圖像 (e)內部架構
(c)圖像 (f)內部架構
3. 動態特性模擬
3.1 SimPowerSystems 模組 圖 9 為包含變速型風力機與柴油引擎發電系統的分散式系統使用 SimPowerSystems 開發的模組,主要 包括六部份-A 部份為 161kV 市電,B 部份為變壓器,C 部份為柴油引擎,D 部分為風力站,E 部分為靜態 負載,F 部分為電動機負載。 圖9 SimPowerSystems 模組架構圖 3.2 模擬順序 圖10 為模擬的時序圖。由圖中可看出 5 秒時靜態負載及電動機順序加入,30 秒時三套風能發電系統順 序加入,60 秒時三部柴油引擎發電系統同時加入總模擬時間 90 秒圖10 模擬時序圖 3.3 模擬結果 此模擬的觀察重點為風能發電系統、柴油引擎發電系統、以及靜態負載依序併入市電的變數變動情形。 圖11(a)為隨機風速波形,風速每兩秒取樣一次,額定風速設為 14m/s。圖 11(b)~圖 11(g)顯示風速為隨 機風時,低於額定風速會依照最大功率追蹤特性來產生實功率,超過額定風速實功率會維持在額定,以避 免風力機損壞。虛功率也會隨著風速不同而變動,直流電容電壓經過控制後會維持在1.0pu,且因風力機加 入系統而有某種程度的暫態產生。當轉速超過額訂時,原本旋角起始角度設為 0°的葉片會上升來控制機械 轉矩,以避免轉速增加過快,當機械轉矩等於電磁轉矩時,轉速就會維持穩定。 圖 11(h)~(k)顯示柴油引擎的電壓、實功率、虛功率及轉速在併入時有程度不同的暫態響應,暫態的大 小和持續時間和組件的容量及參數有關。圖 11(h)顯示發電機端電壓約為 1.015pu,這是因為發電機透過變 壓器與市電併聯,所以端電壓高於市電電壓。圖 11(i)顯示轉速因為慣性的關係,在併入市電時僅有微小的 暫態產生,隨後立即回到1.0pu。圖 11(j)~(k)顯示每部柴油引擎發電系統大約提供 0.99pu 的實功率和約 0.15pu 的虛功率。 圖11(l)~(m)顯示風力站實功率、虛功率受到風能發電系統的加入而增加。圖 11(l)風力站實功率呈現負 值,代表提供實功率給市電,圖 11(m)風力站虛功率呈現正值,代表市電提供虛功率給風力站。圖 11(n)顯 示因161kV 市電供應的實功率因為負載的依序加入而增加,而後因風能發電系統和柴油引擎發電系統與市 電併聯而減少,這是因為發電機分擔了大部分的實功率。圖11(o)顯示市電供應的虛功率逐漸上升,這是因 為市電提供虛功率給負載和風能發電系統。整體而言,此種運轉模式下系統的動態特性合理而且可以接受。
4. 結 論
本研究主要在探討包含變速型風力機與柴油引擎發電系統的分散式系統的動態特性。該系統主要包括 市電、風能發電系統、柴油引擎發電系統、感應發電機、三相變壓器、同步發電機、系統控制器、激磁系 統、以及靜態負載等。研究方法是先推導系統組件的數學模型,接著利用 SimPowerSystems 模組開發並依 系統架構連接,最後進行動態特性模擬與分析。研究結果顯示在此種運轉情形下系統變數變動情形合乎規 定。本研究最大的價值是可做為此種系統規劃、運轉、以及系統擴充的重要參考。參考文獻
[1] Website , http://www.un.org
[2] 經濟部能源局 ,http://www.moeaboe.gov.tw
[3] 劉萬琨等,風能與風力發電技術,五南圖書出版股份有限公司,2009
[4] 牛山泉,風車工學入門-從基礎理論到風力發電技術,國立澎湖科技大學,2009 [5] S. Heier, Wind Energy Conversion Systems, John Wiley & Sons Ltd., 1998
[6] R. Datta and V. T. Ranganathan, “Variable-Speed Wind Power Generation Using Doubly Fed Wound Rotor Induction Machine-A Comparison With Alternative Schemes,” IEEE Transaction on Energy Conversion, vol. 17, pp. 414 -421, Sep. 2002
[7] J.B. Ekanayake and L. Holdsworth, X. Wu, and N. Jenkins, “Dynamic Modeling of Doubly Fed Induction Generator Wind Turbines,” IEEE Transaction on Power Systems, vol. 18, pp. 803 -809, May 2003
[8] H. Geng and G. Yang, “Output Power Control for Variable-Speed Variable-Pitch Wind Generation Systems,” IEEE Transaction on Energy Conversion, vol. 25, pp. 494-503, June 2010
[9] T.K. Saha and D. Kastha, “Design Optimiaztion and Dynamic Performance Analysis of a Stand-Alone Hybrid Wind-Diesel Electrical Power Generation System,” IEEE Transactions on Energy Conversion, vol. 25, no. 4, pp. 1209-1217, Dec. 2010
[10] K. Uhlen, B.A. Foss, and O.B. Gjosater, “Robust Control and Analysis of a Wind-Diesel Hybrid Power Plant,” IEEE Transactions on Energy Conversion, vol. 9, pp.701-708, Dec. 1994
[11] P. Sharma and T. Bhatti, “Performance Investigation of Isolated Wind-Diesel Hybrid Power Systems with WECS Having PMIG,” IEEE Transactions on Industrial Electronics, Vol. PP , Issue 99, pp. 1-8, 2011
[12] SimPowerSystems User’s Guide, Hydro-Quebec TransEnergie International, 2009
[13] P.C. Krause, Analysis of Electric Machinery and Drive System, 2nd Ed, McGRAW-Hill Book Co., USA, Dec 2001 [14] C.-M. Ong, Dynamic Simulation of Electric Machinery using MATLAB/Simulink, McGRAW-Hill Book Co., USA,
1998
[15] J. Delesalle and I. Kauffmann, “Réponse Des Moteurs Diesel Suralimentés Aux Variations Rapides De Puissance Appelée Simulation Mathématique Et Applications,” CIMAC, A, 1977, Pap. A9
[16] IEEE Committee Report, IEEE Guide for Identification, Testing and Evaluation of the Dynamic Performance of Excitation Control Systems, ANSI/IEEE Std 421A-1987, June 1978
[17] IEEE Committee Report, “Excitation System Models for Power System Stability Studies,” IEEE Transaction on Power Apparatus and Systems, PAS-100, pp.494-509, 1981
[18] IEEE Committee Report, “Computer Models for Representation of Digital-Based Excitation Systems,” IEEE Transaction on Energy Conversion, vol. 11, no. 3, pp. 607-615, 1996
[19] R. Pena, J.C. Clare, and G.M. Asher, “Doubly Fed Induction Generator Using Back-to-Back PWM Converters and Its Application to Variable-Speed Wind-Energy Generation,” IEE Proceedings on-Electric Power Applications., vol. 143, no. 3, pp. 231-241, 1996
[20] N.W. Miller, J.J. Sanchez-Gasca, W.W. Price, and R.W. Delmerico, “Dynamic Modeling of GE 1.5 and 3.6 MW Wind Turbine-Generators for Stability Simulations,” IEEE Power Engineering Society General Meeting, pp, 1977-1983, July 2003
(b) WT1 實功率 (g) WTIG1 機械轉矩 (l) 風力站實功率
(c) WT1 虛功率 (h) SG1 端電壓 (m) 風力站虛功率
(d) WTIG1 轉速 (i) SG1 轉速 (n) 市電實功率
(e) WT1 葉片角度 (j) SG1 實功率 (o) 市電虛功率 圖11 系統變數變動情形