國
立
交
通
大
學
理學院應用科技學程
碩
士
論
文
即 時 立 體 影 像 擷 取 與 實 體 重 建 技 術 之 研 究
Capture real-time 3D imaging and technique of
reconstruction object
研 究 生:張明仁
指導教授:許根玉 博士
張冀青 博士
II
即時立體影像擷取與實體重建技術之研究
Capture real-time 3D imaging and technique of
reconstruction object
研 究 生:張明仁 Student:Ming-Jen Chang
指導教授:許根玉 Advisor:Ken-Yu Hsu
張冀青 Chi-Ching Chang
國 立 交 通 大 學
理學院應用科技學程
碩 士 論 文
A Thesis
Submitted to Degree Program of Science
College of Science
National Chiao Tung University
in partial Fulfillment of the Requirements
for the Degree of Master
in
Degree Program of Science
December 2010
Hsinchu, Taiwan, Republic of China
III
即 時 立 體 影 像 擷 取 與 實 體 重 建 技 術 之 研 究
研 究 生:張明仁 指導教授:許根玉 博士
張冀青 博士
國立交通大學理學院碩士在職專班應用科技組
摘要
近幾年由於科技的發展、軟體與硬體設備的品質不斷提升,使得立體
影像播放的技術也跟著日新月異;2009 年好萊塢年度大片”阿凡達”挾著立
體播放的話題,一路連霸全球票房冠軍寶座,並改寫了鐵達尼號所創下全
球的票房紀錄;阿凡達電影的成功,並不只是立體電影的成功,更重要的
是,它啟動了立體影像產業商業化的一個劃時代的開始。
眼鏡式立體顯示技術的發展迄今已有一百多年的歷史,其技術成熟且
相關產品已商業化。但需要長時間配戴眼鏡,且播放的內容也必須先經過
後製處理,滿足左右眼不同的觀看視角以達到立體顯示的目的。因此,不
自然的觀看方式和無法即時立體顯示,是眼鏡式立體顯示技術先天上無法
克服的缺點。裸眼式立體顯示技術的發展較晚,但能夠自然的用雙眼觀看
即時的立體影像,是我們所夢寐以求的終極目標。因此,裸眼式立體顯示
技術是未來立體顯示技術發展的趨勢。
IV
本論文提出即時立體影像擷取與實體重建方法,是以圓柱透鏡陣列之
立體顯示為理論基礎,藉由圓柱透鏡陣列光學成像方式,以高畫素數位相
機擷取影像,再以圓柱透鏡陣列重建並透過實驗測試此方式之可行性。主
要目標在於改善傳統繁瑣的影像擷取及軟體編輯過程並建立即時立體影像
的擷取以及立體顯示系統。
V
Capture real-time 3D imaging and technique of
reconstruction object
Student:Ming-Jen Chang Advisor:Ken-Yu Hsu
Chi-Ching Chang
ABSTRACT
Three-dimensional (3D) stereoscopic imaging is a highly increasing imaging
technique that promptly tends to be popular, unaided, and simple and cost
effective trends. This project proposes the concept and underlying theory for
real-time 3D image capture and wide field of view reconstruction of real object
and its applications in digital holographic display. In this project, we propose a
novel approach to a 3D stereoscopic imaging based on the theory of lenticular
stereoscopic imaging to improve the capture image quality. In this approach we
employ an ultra-high pixel array camera or CCD camera with micro elements,
lenticular lens array (LLA), directly capture the image of real object. The
advantage is easy to combine TFT-LCD and the ability to overcome the
constraints in a conventional lenticular imaging technique that employs screen
printing.
VI
誌謝
本研究論文之完成,首先最衷心感謝恩師張冀青教授,自我從大學時
期開始張教授就是我的專題指導老師,碩士班兩年的時間,在課業及研究
領域上不斷的督促與教導我,使我有正確的方向並順利的完成學業。接著,
感謝光學實驗室許民宗學長和吳文和學長鼎力的幫助,使得本論文更完整
而嚴謹。另外,感謝口試委員許根玉老師及陳永富老師的建議與指正,讓
我的論文更臻完備。
最後,我要感謝摯愛的妻子潘妍潔,因為有你的體諒、關心及默默的
付出,才能使我順利完成學業。
VII
目錄
摘要 ... III ABSTRACT ... V 誌謝 ... VI 表目錄 ... IX 圖目錄 ... X 一、緒論 ... 1 1.1 前言 ... 1 1.2 研究動機與目的 ... 1 1.3 研究方法 ... 1 1.4 研究流程及內容 ... 2 1.5 論文架構 ... 2 二、人眼產生立體影像的視覺機制 ... 3 2.1 眼睛與立體影像的關係 ... 3 2.1.1 眼睛的結構 ... 3 2.1.2 視神經與側膝狀體(LGB) ... 3 2.1.3 眼睛的特性 ... 4 2.2 產生深度感之因素 ... 5 2.2.1 生理因素... 5 2.2.2 心理因素... 8 三、立體影像技術的發展 ... 11 3.1 文獻回顧 ... 11 3.2 立體成像分類 ... 15 3.2.1 眼鏡式立體成像技術 ... 17 3.2.2 裸眼式立體成像技術 ... 24 3.3 立體影像技術未來發展趨勢 ... 28 四、實驗與分析 ... 29VIII 4.1 圓柱透鏡陣列法立體顯示原理 ... 29 4.1.1 單一圓柱透鏡的光學特性 ... 29 4.1.2 柱狀透鏡陣列與圖像分割關係 ... 32 4.2 平面影像立體顯示原理 ... 33 4.2.1 立體影像製作原理 ... 34 4.2.2 圓柱透鏡陣列板與圖像排列關係 ... 36 4.2.3 觀看距離與 Pitch 數關係 ... 37 4.3 實驗架構 ... 38 4.4 實驗設計 ... 40 4.4.1 影像的擷取 ... 40 4.4.2 立體影像顯示的模擬 ... 44 4.5 實驗結果與分析 ... 45 五、結論與未來研究 ... 47 5.1 結論 ... 47 5.2 未來研究 ... 47 參考文獻 ... 48
IX
表目錄
表 3-1 以觀看方式說明立體成像分類………16 表 3-2 立體顯示技術分類表………17
X
圖目錄
圖 2-1 眼睛的成像原理………...………3 圖 2-2 視覺神經傳遞結構圖………...………4 圖 2-3 右眼與左眼視場的量測範圍………...………4 圖 2-3 光角示意圖………...………5 圖 2-4 視角示意圖………...…………6 圖 2-5 視差示意圖………...………6 圖 2-6 非交錯視差示意圖………...……7 圖 2-7 零視差示意圖………...……7 圖 2-8 交錯視差示意圖………...……8 圖 2-9 線性透視範例………...……8 圖 2-10 地域透視範例………...…...…. 9 圖 2-11 重疊範例………...………..9 圖 2-12 誘導立體範例………...……10 圖 3-1 1833 年 Wheatstone 立體鏡成像示意圖………...…..11 圖 3-2 1844 年 Brewster 立體鏡成像示意圖………...…...12 圖 3-3 1850 年紅綠眼鏡立體法成像示意圖………...….12 圖 3-4 1903 年視差遮障立體法成像示意圖………...….13 圖 3-5 1908 年柱狀透鏡陣列法成像示意圖………...….14 圖 3-6 1962 年隨機點立體成像示意圖………...….14 圖 3-7 1962 年全像術成像示意圖………...……….15 圖 3-8 立體成像技術分類參考圖………...…………..16 圖 3-9 彩色多功法示意圖………...………..18 圖 3-10 Dolby 眼鏡式彩色多工法立體顯示技術示意圖………...……….19 圖 3-11 極化多工法示意圖………...…….19 圖 3-12 RealD 眼鏡式極化多功法(圓偏振)立體顯示技術示意圖………...….20 圖 3-13 IMAX 眼鏡式極化多功法(線偏振)立體顯示技術示意圖………...21 圖 3-14 時間多工法示意圖………...…22 圖 3-15 XpanD 眼鏡式時間多功法立體顯示技術示意圖………...23 圖 3-16 位置多功法示意圖………...……24 圖 3-17 視差遮障法示意圖………...……25 圖 3-18 1996 至 2008 年在 OSA 發表和此技術相關的論文和研討會數量成長的 情況………...……….25 圖 3-19 堆疊立體法技術的概念………...……26 圖 3-21 彩虹全像片重建立體影像後以三個不同觀察角度所拍攝(a) 左邊拍攝效 果(b)中邊拍攝效果(c)右邊拍攝效果………...…..27XI 圖 4-1 入射光進入柱狀透鏡後之光跡圖………...………29 圖 4-2 單一柱狀透鏡各參數關係圖………...………30 圖 4-3 單一柱狀透鏡放大率與方位關係圖………...………31 圖 4-4 柱狀透鏡陣列板設計參數圖...32 圖 4-5 柱狀透鏡陣列板與觀賞圖像關係圖...33 圖 4-6 平面圖像立體效果示意圖……...33 圖 4-7 立體影像觀看示意圖………...34 圖 4-8 平面圖像位移示意圖………...35 圖 4-9 位移後立體圖像觀看示意圖………...35 圖 4-10 單一圓柱透鏡平面圖像排列法………...36 圖 4-11 2 個圓柱透鏡平面圖像排列法……...36 圖 4-12 3 個圓柱透鏡平面圖像排列法……...37 圖 4-13 觀看距離與 Pitch 數關係及計算公式………...37 圖 4-14 觀看距離與 Pitch 數的幾何光學關係式………...38 圖 4-15 影像擷取及顯示示意圖…………...39 圖 4-16 相機改裝示意圖………...40 圖 4-17 正視角情況下魔術方塊影像………...41 圖 4-18 正視角情況下人形娃娃影像………...41 圖 4-19 右視角情況下魔術方塊影像………...42 圖 4-20 右視角情況下人形娃娃影像………...42 圖 4-21 左視角情況下魔術方塊影像………...43 圖 4-22 左視角情況下人形娃娃影像………...43 圖 4-23 透過圓柱透鏡陣列板分割及重組後的立體影像…………...44 圖 4-24 加入背景的立體影像…………...45 圖 4-25 前景與背景位移方向示意圖…………...46
1
一、緒論
1.1 前言 立體顯示技術發展至今已有一百多年的歷史了【1】,同時立體顯示技術在發 展的過程中也被廣泛的應用於各種不同的領域之中,例如:電視娛樂、電腦遊戲、 飛行摸擬系統,或是醫療影像診斷系統等。人們之所以會不斷追求與創造新的立 體影像技術,起因於人類生活於三度空間的立體世界裡,人眼所看到的空間景 物皆是有景深的圖像。長久以來,雖然可以藉由平面顯示器利用軟體虛擬的方式 來呈現類似立體效果,例如以漸層、加陰影或是透視圖的表現法等,但仍然無法 真正模擬出人眼的對真實世界的立體效果的感知。因此,不論藉由任何方式可使 兩眼可以感知立體影像的效果,而達到更接近真實世界的立體的效果,是人類持 續要追求與實現的目標。 1.2 研究動機與目的 儘管立體顯示技術不算是新穎的新概念,但直到 2009 年好萊塢年度大片「阿 凡達」的成功,才重新讓世人體會到立體顯示技術在商業市場的重要性,以及未 來的發展方向。2009 年以來由 CES(The International Consumer ElectronicsShow)光電展、IFA(Internationale Funkausstellung Berlin)到橫濱光電展,幾乎全 球各大廠均展出立體顯示相關技術,並有廠商預期將自 2010 年把立體顯示技術帶 入家庭。多數消費性電子供應商,已陸續擁抱這立體顯示視界所帶來的市場。 短短不到 2 年的時間,立體顯示相關的話題和產品如雨後春筍般的快速發 展,依影像顯示的方式大致上可分為兩大類,一是要配戴輔具的顯示系統,另一 類則是祼眼即可觀賞的顯示系統。雖然兩者皆有立體效果呈現,但是也各有其優 缺點。就配戴輔具系統的立體顯像系統而言,它可以得到較佳的立體效果和色彩 呈現。但是,載上頭盔或是眼鏡的之類的輔具,不但需要每個人都要有一套輔具, 而且使用者經長久的配戴,不但不方便也增加眼睛的負擔。另就裸眼立體顯示系 統而言,雖然其立體顯示的效果上不及配戴輔具式的立體顯示系統的好,但是, 除可免於需載輔具所造成的不便外,同時可以提供給多人觀賞。 因此,本論文提出裸眼即可觀賞之立體顯示系統,本系統分成兩個部分:(1) 即時的影像擷取及(2)立體影像的重建。影像的擷取主要是利用圓柱透鏡陣列版將 物體影像做初步的分割,分割後的物體影像再經由改裝在感光元件上的圓柱透鏡 陣列重組,而達成裸眼即可觀賞立體影像的目的。 1.3 研究方法 本論文的研究方法,首先針對即時的影像擷取部分,將物體影像投影至圓柱 透鏡陣列板的表面,讓圓柱透鏡陣列板對物體影像進行分割。同時,利用高畫素 數位相機,在圓柱透鏡陣列板的可視角範圍內,將被分割的影像記錄下來。並對 紀錄下來的影像進行分析,藉以了解物像被圓柱透鏡陣列板分割成不同視角的情
2 況。 接下來,利用另一圓柱透鏡陣列版將分割成不同視角的物像重建,並對重建 後的立體影像進行分析,藉以了解本論文所提的立體顯示技術是否有其可行性及 後續的利用價值 1.4 研究流程及內容 研究流程規劃如下: 第一階段: 為文獻蒐集和相關技術、理論研究:先瞭解人眼的構造與立體成像之間的關係, 並且將市面上的立體成像相關技術和原理加以研究。 第二階段: 以單眼數位相機直接擷取成像於圓柱透鏡陣列板焦平面附近之影像:考量鏡頭對 焦及需擷取較遠及較大之影像,並解決感光度及曝光度不足之窘境,我們利用掃 描器 Epson 2450 scanner(最高解析度為 1200dpi*1200dpi)及單眼數位相機 (Cannon EOS 350D, 22.2mm*14.8mm CMOS 約為 800 萬有效像數)直接擷取 成像於圓柱透鏡陣列板焦平面附近之影像,以達到與本研究之架構最相近之模擬 效果;以此方式擷取經圓柱透鏡陣列板編碼之交錯影像,可透過手動對焦、調整 光圈及手動曝光方式取得較清晰之結果,但因視角與立體感仍額外受限於所增設 之透鏡組,且原相機鏡頭之視角、光圈、孔徑大小及感光元件(CCD 或 CMOS)之 解析度皆會使所呈現之立體效果大打折扣,相關參數及特性探討列為研究規劃之 重點。 1.5 論文架構 本論文架構可分為五個部分,第一個部分為本論文的研究動機與目的,說明 現階段立體顯示技術的發展,其中眼鏡式的立體顯示技術雖然發展成熟,但有其 先天上的缺點,因此,裸眼式的立體顯示技術仍然是未來發展的重點。第二部分 則是說明人類是如何藉由眼睛的生理構造及心理的影響而產生立體視覺。第三部 分為現階段眼鏡式及裸眼式的立體顯示技術詳細介紹和優劣比較。第四部分則是 本論文提出之立體影像擷取與實體重建方法,並透過實驗測試此法之可行性。第 五部分是結論與未來研究方向。
3
二、人眼產生立體影像的視覺機制
人類的視覺之所以能看到立體的世界,除了視網膜的成像機制外,兩眼視覺像差以 及腦海中的視覺成像,都是讓我們感知出物體或空間的深度感覺。因此,我們需要先要 了解眼睛的基本構造,其次為探討人眼產生深度感的視覺因素。研究指出,位於視神經 末端的一對組織-側膝狀體 Lateral geniculate body(LGB),對於深度感的產生扮演非常 重要的角色。因此,本章首先要探討眼睛的基本構造,接下來便會指出產生深度感的三 項生理因素、七項心理因素,以及三種產生深度感的形式。 2.1 眼睛與立體影像的關係 2.1.1 眼睛的結構 人眼可見的光譜只佔電磁波整個頻譜的一小段(400nm~700nm),當影像光 波進入人眼後,先經由角膜( Cornea)(角膜的主要功能是負責屈光)的折射,透 過瞳孔(Pupil)調整光通量後,再經由水晶體(Lens)調解焦點,最後影像成像於視網 膜(Retina)上,如圖 2-1【2】所示。研究顯示,一對眼睛的視差是造成深度感的 主要原因。眼睛的球狀結構,使得單眼視網膜所成的影像只是一個二維影像的資 訊,因此,單眼視網膜所蒐集到的影像是不會有深度感的,需藉由另一隻眼睛所 看到的影像,讓視網膜將接收到不同角度的二維影像資訊,透過視神經傳輸至大 腦,再經過大腦對於兩張影像的判別,進而對該物體產生遠近距離的深度感。 圖 2-1 眼睛的成像原理 2.1.2 視神經與側膝狀體(LGB) 【3】 視網膜接受訊息後經過視交叉有兩個不同的通路,90%的神經會經過側膝核 (Lateral Geniculate Nucleus, LGN)再傳到視覺神經。值得注意的是,視覺神經接 受訊息前,側膝核(LGN)會先交叉一次,主要功能是將左眼的訊息交換為右邊的資 訊,右眼的訊息交換為左邊的資訊,如圖 2-2 所示。這個動作可使單眼視網膜所 收集的 2D 影像資訊,透過視覺神經傳送至大腦,再經大腦處理兩張 2D 影像資訊,
4 進而產生有深度感的立體影像。 圖 2-2 視覺神經傳遞結構圖 2.1.3 眼睛的特性 人類眼睛有幾項重要的參數與特性,我們將其列舉如下【4】: 1.眼睛的平均距離(瞳孔的距離):6.5cm。 2.瞳孔的直徑:2−8mm(依亮度改變而改變)。 3.最大的角度解析度:約為 50 ′′ (即. 1/120°)。 4.最大的資訊傳輸率:雙眼的傳輸率為 6 10 3 . 4 × bits/s,單一神經的傳輸率為 5 bits/s。 5.視場(Visual field):市場可分成三個主要的部分,如圖 2-3【4】所示: 圖 2-3 右眼與左眼視場的量測範圍
5
(1)靜止的視場(Static visual field):當眼睛往前直看的視場。
(2)固定點的視場(Fixation point):對於一固定點,眼球可移動的範圍。
(3)可動的視場(Dynamic visual field):將頭固定住,眼睛所允許移動的範圍。
2.2 產生深度感之因素 由上一節可以了解人眼的基本結構及成像原理,接下來從生理上和心理上探 討人眼產生深度感的幾個視覺因素,分述如下【5】: 2.2.1 生理因素 1.光角(Optical Angle): 所謂光角即雙眼觀看一物體時兩眼視線與該物體所型成的夾角,因為物體與 人眼之間的距離不同,因此所形成的夾角也不同,如圖 2-3 所示。圖 2-3 中的物 體 A 與人眼距離較近,其所形成的光角θA較大。而物體 B 因為離人眼距離較遠, 其所形成的光角θB亦較小。而人眼在觀看物體時調整兩眼的觀看角度,也因此人 們對物體會有遠近感的產生也是因為其光角的不同所致。但是,當觀看距離超過 一定的長度時(≥1 公里)【6】,會因為光角的變化過小,人眼無法辦別光角的差異 性,而分辦不出遠近。 圖 2-3 光角示意圖 2.視角(Visual Angle): 視角即物體與單一眼睛所形成的夾角,若兩物體於同一平面位置上,但是其 大小不同,此兩物體與單一眼睛所形成的夾角亦不相同。如圖 2-4 所示。圖 2-4 中有兩物體 C 與 D,因為物體 C 較小,所以與單一眼睛所夾的視角θc也較小,而 另一較大物體 D 與單一眼睛所夾的視角θD也較大。但是,此兩物體必需在位於同 一水平線上方可比較。若是相同的物體分處在不一樣水平線上的狀況下,雖然兩 物體的大小一樣,但靠近眼睛的物體所形成的視角會比遠的物體所形成的視角來
6 得大,換言之θE大於θF,所以眼睛會覺得物體 E 比物體 F 大。 圖 2-4 視角示意圖 3.視差(Binocular Parallax): 人們之所以會對物體有深度、層次和空間的感覺,是因為兩眼的「視差」, 也因為人眼有了視差,我們才能對物體距離大小的差距,有一定的分辦能力。由 於人們兩眼瞳孔之間的間距大約為 6.5 公分左右【7】,兩眼在看同一物體時,會 因為左右眼位置的差異,而使左右眼分別看到不一樣的影像,因此兩個影像即是 兩眼的視差所造成。上兩點所提到的光角、視角與視差之間的關係如圖 2-5。光 角愈小,兩眼所產生的視差影像也愈大,反之亦然。但是,當距離太遠時,兩眼 間的視差影像已相差不大,即代表無法感受其影像的不同,亦代表人們將無法感 知其遠近差異 。 圖 2-5 視差示意圖 其中視差部份可區分為三種不同的狀況來討論,分別為非交錯視差
7
(Uncrossed Parallax)、零視差(Zero Parallax)以及交錯視差(Crossed Parallax)等 三種不同的視差效果,這些視差效果使我們對景物有遠近和前後的感覺。因為人 們在觀賞景物時,會自動調節眼球曲度和位置,以獲得最佳的觀賞景像。同時依 兩眼球觀賞景物時的焦點視線(Focusing Visual)所交會的狀況,所產生遠、中以及 近效果可分為下述的三種視差情形【8】: (1)非交錯視差: 非交錯視差代表兩眼平行向前方平視或是其兩眼的焦點視線相交在很遠的地 方幾近無交點,而此時的影像會成像於觀察平面之後,這代表遠方的景像,如圖 2-6 所示。 圖 2-6 非交錯視差示意圖 (2)零視差(Zero Parallax): 零視差為兩眼的焦點視線正好相交於觀察平面上,則影像也剛好呈現在顯示 器上,代表影像在所呈現的立體影像的相對中間位置,如圖 2-7 所示。 圖 2-7 零視差示意圖 (3)交錯視差(Crossed-Parallax): 交錯視差為兩眼的焦點視線相交於觀察平面之前,則影像將呈現在平面顯示 器之前,代表影像在所呈現的立體影像的相對前面的位置上,如圖 2-8 所示。
8 圖 2-8 交錯視差示意圖 上述三種不同的視差方式,代表立體呈像時的不同效果。雖然說小一點視差 角度會使人觀看較為舒服【9】。但是,有時為了設計內容效果,增加視差的變化 或者是加強其前後景深的位置,過分強調其效果,反而不自然,也讓人感覺不舒 服。 2.2.2 心理因素
1.視網膜上成像的大小 ( Retinal Image Size ):
一般而言,視網膜上的成像愈小,離我們就越遠,越大就越近,但很多物體 的實際大小根據已有的經驗所瞭解,使差不多一樣大小物體能加以區分,例如看 起來和人的高矮差不多的大象,可以肯定大象比人是在離我們更遠的距離。 2.線性透視 ( Linear Perspective ): 景物隨著距離的增加而成線性縮小,例如平行的鐵執愈遠處顯得愈窄如 圖 2-9,用道路兩旁的樹、用磚砌成的牆或路愈遠處顯得愈小,這在繪畫中被廣泛 地應用。 圖 2-9 線性透視範例
9 3.範圍透視 ( Area Perspective ): 遠處的群山或景物總顯得有些模糊如圖 2-10,這是由於空氣中的微粒 ( 如 煙、塵、水氣等 ) 對光的散射和吸收產生的,故國畫家們總是用淡墨畫出遠處的 山水以增加立體感。 圖 2-10 地域透視範例
4.明暗和陰影 ( Shades and Shadow ):
. 一個立體的物體被斜光照射後各部位會顯出不同的光澤和陰影,西洋畫家們 就是利用這點在平面畫上加上光澤和陰影來加強立體感。 5.重疊 ( Overlapping ): 前面的物體總要擋住一些後面的物體,因此有交點的輪廓線平滑連續的圖像 比被遮斷的離我們更近如圖 2-11。 圖 2-11 重疊範例
10
6.誘導立體 ( Induced Stereovision ):
在具有雙眼立體像的周圍如存在有單眼所看到的圖像部份,則該部份將被誘導 成具有立體感的立體像如圖 2-12。
圖 2-12 誘導立體範例
7.大螢幕立體 ( Large Screen Stereovision ):
人類的眼睛視野是很寬廣的,約相當於一個水平 220°,垂直 130°的廣角相 機,一般我們可以在視角水平 90°和垂直 70°內輕鬆地觀看任何東西,但當我們看 著寬大或者是超寬大的電影布幕甚至是圓頂形螢幕時,即使放映的是平面的,但 卻使人彷彿浸沉在立體的視覺當中。
11
三、立體影像技術的發展
立體影像的產生,首先要對深度感(Depth perception)做一個定義。西元 280 年歐 幾里德發表立體視覺概念【10】:對於同一個物體,兩眼同時分別看到不同的影像,這 便會造成深度感,現代心理學中,上述所做的定義則稱做是雙眼視差(Binocular parallax), 它 是 造 成 深 度 感 的 一 個 重 要 因 素 , 另 外 還 有 光 角 ( C o n v e r g e n c e ) 與 眼 調 節 (Accommodation)能力,對於產生深度感也扮演著重要的角色。 近幾年由於科技的發展、軟體與硬體設備的品質不斷提升,使得立體影像播放的技 術也跟著日新月異;2009 年好萊塢年度大片”阿凡達”挾著立體播放的話題,一路連霸全 球票房冠軍寶座,並改寫了鐵達尼號所創下全球的票房紀錄;阿凡達電影的成功,並不 只是立體電影的成功,更重要的是,它啟動了立體影像產業商業化的一個劃時代的開始。 本章主要以所蒐集的文獻資料為依據,將現有及最新立體成像技術分類,並詳細分述各 類立體成像原理及基本技術。 3.1 文獻回顧 發展最早的立體影像技術可追溯到 1833 年 Charles Wheatstone【11】利用 兩面反射鏡放入兩張不同的圖畫,讓觀賞者兩眼看到不同的圖像,然後將看到的 圖像在腦中融合成一張立體圖像,如圖 3-1【12】所示。觀賞者將頭置於 B 處, 左右兩眼分別看到 A 與 A’兩面反射鏡的影像,E 與 E’則放入左右欲觀看的影像, 影像經反射鏡到達人眼後,人腦將之合成立體影像。Wheatstone 在 1838 年正式 在英國倫敦公開發表他的理論,並將此立體鏡命名為「Wheatstone 立體鏡」。隨 後的幾年間也有人利用攝影方式,將不同的照片放入該立體鏡中,而成為立體的 照片而非僅限於圖畫。 圖 3-1 1833 年 Wheatstone 立體鏡成像示意圖12 1844 年,David Brewster 利用分光鏡取代兩片反射鏡的方式來改良 Wheatstone 立體鏡,此立體鏡被稱為 Brewster 立體鏡【13】,並且更進一步將之 做成立體眼鏡,如圖 3-2【14】所示。到了 19 世紀中期,有很多廠商根據 Brewster 立體鏡的概念,開發各式各樣類似的立體觀察裝置來觀看靜止的單一圖像。也是 因為如此,在當時,各相關的立體攝影相機、觀賞眼鏡等各種商品不斷的被開發 出來,使立體圖像正式成為一個受歡迎的消費娛樂商品。 圖 3-2 1844 年 Brewster 立體鏡成像示意圖
1850 年法國人 Joseph D’Almeida 和 Louis Du Hauron 發表補色法濾光片 (Anagly)立體成像技術【15】。如圖 3-2 所示,圖中已將圖片轉換成兩色互補色的 相同圖案後做些微的錯位,再戴上貼有相同互補色的眼鏡,因為濾光的效果,左 右眼會分別看到錯位後的圖像,經由視神經感測後透過大腦將兩張圖像重新組 合,使我們感覺到立體影像的存在。而補色有許多不同的顏色可以相互配合,如: 紅綠、紅藍、以及黃藍……等。 圖 3-3 1850 年紅綠眼鏡立體法成像示意圖
13 1903 年美國的 F.E.Ives 提出的視差遮障立體法,亦稱「黑線立體法」【16】, 是為了使觀賞者都可以很輕易的看到立體圖像,而不需要加載任何輔具,以提供 觀賞者欣賞的方便性。此法主要是利用相同間隙的粗黑線條當做一個遮障濾片, 如圖 3-4 所示,當觀賞者觀察圖片時,圖片經過該隙縫光柵濾片後,右左眼分別 看到隙縫光柵濾片下的不同圖像,同像地,經由視神經感測後透過大腦將兩張圖 像從新組合,使我們感受到立體影像的存在而達到立體的成像效果。 圖 3-4 1903 年視差遮障立體法成像示意圖
1908 年法國科學家 Gabriel M. Lippmann 提出堆疊立體成像法(Integral Method)的技術【17】,1920 年便開始有其他的科學家們在此技術的基礎下,以柱 狀透鏡陣列(Lenticular Lens Array)取代該技術所使用的圓形透鏡陣列製作出立體 圖【18】。主要原理是將不同視角的影像融合在一張圖像中,再利用柱狀透鏡陣列 幾何光學成像特性,讓左右眼看到不同的視角影像,而達到立體的成像效果,如
圖 3-5 所示。由於塑化材料和印刷技術的發達,在 1960 年後柱狀透鏡陣列的立體 印刷產品,已正式大量生產並廣泛的應用在各種產品上。
14
圖 3-5 1908 年柱狀透鏡陣列法成像示意圖
1962 年 Bela Julesz 博士以隨機黑白點製作出內藏立體圖像的”隨機點立體 圖”(Random Dot Stereogram, RDS) 【19】,在觀看此類的圖像時,因為無法一
瞬間就看到該圖,兩眼必須要利用平行法或是交叉法才能看到此一圖像,如圖 3-6 所示,也有人利用該方法做為視力矯正訓練或是加以加密做為防偽之用。
15
全像術(Holography)是由英籍匈牙利人 Dennis Gabor 在 1948 年發明的立體 成像技術【20】,並在 1971 年榮獲諾貝爾物理學獎。他利用光波來記錄物體光波 的振幅(Amplitude)和相位(Phase)的相關訊息。但是當時並無同調光源,直到 1962 年雷射發展成功,美國科學家 Leith 與 Upatniks 使用兩光束法成功設計出雷射全 像干涉立體像系統【21】, 如圖 3-7 所示,才使全像技術得以迅速發展。 圖 3-7 1962 年全像術成像示意圖 3.2 立體成像分類 科學家至今對於立體成像技術意見分歧,要如何對立體成像技術分類尚未有 統一的標準。一般以 1993 年美國專利(Multi-mode Steroscopic Imaging
System,US 5,264,964)【22】的公告內容中將立體成像技術分成三大類為依據, 雙眼視覺立體成像(Binocular Stereoscopics)、自動立體成像(Autostereoscopics) 及多模態立體成像(Multi-mode Stereoscopics)等技術,其立體成像技術分類,參 考圖 3-8 所示。另外,從多倫多大學的 DGP(Dynamic Graphics Project)研究員 George Gitzmaj 網頁資料中【23】利用不同視覺方式對立體成像技術分類,以眼 睛位置、原始波長效應,及不同視點和透明圖說明其分類方式,可參考表 3-1。
16 圖 3-8 立體成像技術分類參考圖 表 3-1 以觀看方式說明立體成像分類 輔具配載 實際的原始波 所需影像 視點決定透視圖 需外加輔具 色彩多工法 極化多工法 時間多工法 位置多工法 固定影像平面,注 視凝視控制影像 平面 2 隨意的 (一個人觀賞) 不需加輔具 方向多工法 (繞射,折射, 反射作用) 固定影像平面,注 視凝視控制影像 平面 2 隨意的 (少數人觀賞) 自動立體 體積式顯示法 立體全像術 明顯深度平面, 完全的空間 無限制 固定的 (少數人觀賞) 隨科技的進步立體成像技術正不斷地被改良與創新中,不論前述何種分類方 式來劃分立體成像技術;本論文研究以文獻收集整理與歸納方式,將立體成像技 術劃分為二大類,第一類:需輔助工具,即戴特殊眼鏡才能觀察到立體效果;第 二類:不需輔助工具,即裸眼就可以看到立體效果,可參考表 3-2。後續,將按此 表分類方式對立體顯示相關技術作深入且詳細的介紹,
17 表 3-2 立體顯示技術分類表 觀賞方式 立體成像方式 所需影像 觀賞人數 比較 眼鏡式 彩色多工法[24] 2 無限制 立體效果較佳,但是需配戴 輔助工具才能觀賞, 長時間 使用將造成觀賞者身體上的 負擔。 極化多工法[25] 時間多工法[24] 位置多工法[26] 裸眼式 視差遮障法[25] 2 可視範圍 內均可觀 賞 在立體全像術技術尚未完成 開發前的過度技術。 堆疊立體法[27] 無限制 在立體全像術技術尚未完成 開發前的過度技術。 圓柱透鏡陣列法[27] 2 張以上 在立體全像術技術尚未完成 開發前的過度技術。 立體全像術[28] 無限制 未來理想中的立體影像,但 技術門檻高,目前仍以實驗 室的研究為主。 3.2.1 眼鏡式立體成像技術 眼鏡式立體成像技術的發展歷史最悠久也最成熟,目前國際上積極在推動立 體影像進入家庭的標準就是眼鏡式的立體影像。依不同的應用有不同的搭配需 求,眼鏡式的彩色多工法與極化多工法為被動式,使用輕便,後者影像品質較優, 目前最普遍採用,立體電影就是利用左右眼影像分別正交偏極投影搭配偏極化眼 鏡的技術,另外 FPD 面板加上偏極光學元件搭配偏極化眼鏡的技術也普遍被運 用,日本 Arisawa Xpol stereoscopic 3D LCD 顯示器就是用自己生產的
Micropolarizer 做成。2008 年 Samsung 推出的 61 吋 PDP 3D TV,都是搭配 偏極化眼鏡的立體顯示器技術,而 LG、Philips、JVC 的 LCD TV 則採用偏光方 式眼鏡加貼附偏極光學元件的顯示器。 眼鏡式的時間多工法與位置多工法為主動式,目前市場上也有多家廠商支援 此一技術,此一技術主要是控制眼鏡上液晶的轉向來決定是否讓光線通過,以 達成左右眼看到各自該看到的畫面,這樣方式的優點在於眼鏡只管光線的通過與 否,並未對光線作任何的加工,因此成像的品質較彩色多工法與極化多工法優良, 當然,這樣的液晶眼鏡造價相對而言也是比較高的。2009 年 Nvidia 推出主動快 門方式(Active Shutter)眼鏡加場序方式顯示器的方案,可搭配 Samsung 與 View Sonic 的 120Hz 液晶螢幕、MitsubishiDLP 高畫質電視,同時 Sony 的 LCD TV, Panasonic、Samsung、LG 的 PDP TV 也都是採用主動快門方式眼鏡加場序方 式顯示器。
18 將左右眼要觀賞的圖片如圖 3-9,套上兩種不同顏色(紅色和藍色),並將 兩圖片做左右位移後,貼合於同一張圖片上,觀賞者載上貼有與觀賞圖片同樣 顏色的濾色片眼鏡(歐洲常用紅和綠色,美國則為紅和藍色),觀賞者透過濾色眼 鏡之後,左右眼分別看到濾色後有位移的紅、藍影像,藉此產生立體感。 這是一種很廉價,且容易實現的方法,並被廣泛的使用在立體電影,立體 電視或是一些出版品。但是,由於這種方法會完全的改變圖片原本的顏色,若 觀賞內容為藝術品或是影像顏色的相關性較高的話,較不易於呈現立體效果。 圖 3-9 彩色多功法示意圖 Dolby 在電影界就是利用眼鏡式的彩色多工法技術,如圖 3-10,在投影機燈 泡和顯像元件之間插入可透光的「濾光輪」。光輪分成兩半,每半邊能將光線按不 同波段分開,再通過眼鏡的分別接收就能創造 3D 效果。濾光輪將 RGB 三原色分 光成較深和較淺的兩組,然後左右眼分別接收,所以,Dolby 的 3D 眼鏡其實是一 種濾色眼鏡。更簡單的說法,光輪分成兩邊,其中一邊比較透光,另一邊比較不 透光。當左右眼影像交替從投影機投射時,這個轉輪就會快速的對應轉動,讓其 中一眼影像顏色較淺,另一眼的影像顏色較深,再通過眼鏡的搭配,左右眼就會 只看到個別的影像,最後創造 3D 效果。 Dolby 系統的色彩問題,因為是透過濾色過程來產生 3D 效果,所以會對色彩 產生一些影響,讓色彩失準;不過因為整體花費成本低,所以在台灣的立體顯示 電影院大多採取 Dolby 的顯示技術。
19
圖 3-10 Dolby 眼鏡式彩色多工法立體顯示技術示意圖
2.極化多工法[25]:
該技術是由美國 Polaroid 公司的 Edwin H. Land 於 1938 年發明。由於光有 偏極化的特性,所以搭配適合的偏光片,則可以讓光入射到偏光片時,只允許與 偏光片偏振方向平行的光通過,垂直的偏振光的方向則會被濾掉。因此,將左右 眼的影像經過兩相互垂直的偏光板(大部分為 0 度和 90 度或是 45 度和 135 度的配 合),再將影像在投影後螢光屏,而人眼在觀賞螢光屏的影像時,需載上相同偏光 角度的偏光眼鏡,讓人眼看到左右不一樣的影像,產生立體感,如圖 3-11。 圖 3-11 極化多工法示意圖
20 RealD 在電影界使用偏振式立體顯示技術,如圖 3-12;在投影機鏡頭前加一 塊偏光片(Z screen),將畫面分成左右眼,觀眾只要配戴對應的偏光眼鏡,便能使 左右眼看到「各自」應該看到的影像;RealD 採取的是圓偏光設計(circular polarized),或稱循環型偏光。這種眼鏡左眼採逆時針偏光,右眼採順時針偏光, 一樣能達成偏光效果,而且好處是移動頭部時的影響比較小,左右眼看影像時比 較容易合焦。這樣的設計有點類似自動對焦相機內部的偏光片,也就是採螺旋型 偏光設計,讓相機在不同角度下都能順利對焦。RealD 的系統在運作時投影機會 將電影原本的 24fps 畫面變成左右眼各重複 3 次,也就是左眼 72fps、右眼 72fps, 合起來就是每秒 144 張畫面,等於是六倍速顯示。其它只要採取單台投影機的立 體顯示,大部分也是如此。 RealD 的缺點在於畫面亮度,因為它在鏡頭前加了一塊偏光片,加上眼鏡也 有偏光鏡片,所以畫面亮度會被減低不少。不過,標準 RealD 系統會要求業者必 須搭配金屬銀色銀幕進行亮度補償;另一方面,因為 RealD 的立體顯示技術均可 支援偏光眼鏡或是主動式快門眼鏡,並適用於所有種類顯示技術,且 RealD 擁有 立體顯示並排(side-by-side)格式技術的基本專利權,更重要的是,目前大部分的 好萊塢立體電影顯示格式,都需要經過 RealD 的驗證,也因為如此,大部分立體 電視品牌大廠,包括 Sony、Samsung 和 Toshiba 等都選擇與 RealD 合作,所以 RealD 目前是全球接受度最高的立體放映技術。
圖 3-12 RealD 眼鏡式極化多功法(圓偏振)立體顯示技術示意圖
21 體顯示技術採用的偏光原理是線偏光方式,也就是採用線偏光的眼鏡,使用兩部 投影機來投射左右眼畫面,再透過偏光眼鏡接收左右眼畫面。 這種技術的缺點在於頭不能隨意偏轉或移動位置,否則立體效果會打折,會 出現疊影或鬼影,再來是影片被放大之後,近距觀賞可能會覺得解析度不如預期; 此放映技術的優點在於超級巨大的畫面所帶來的迫力感,在這方面 IMAX 擁有普 通戲院無法追趕的魅力,再加上寬大的的銀幕使 IMAX 3D 創造感官震撼的能力, 是所有技術中最強的。標準的 IMAX 銀幕為 22 米寬、16 米高(72.6 x 52.8 英尺), 但可以在更大的銀幕播放。IMAX 是大格式及需在特定場館播放的影像展示系統中 最為成功的。 圖 3-13 IMAX 眼鏡式極化多功法(線偏振)立體顯示技術示意圖 3.時間多工法[24]: 為了讓左右眼所觀察到的影像為不同的時間差所呈現結果,觀察者可配戴由 液晶(Liquid Crystal)做成快速開關的眼鏡,並且加上一個與顯示器同步的訊號控制 線路。當左眼影像呈現時,立體液晶眼鏡的左眼視窗打開時,右眼視窗是關閉的。 當右眼影像呈現時,剛好相反,右眼視窗打開,左眼視窗被關上。因為左、右兩 眼需快速的交替顯示影像,因此原本顯示器的顯示頻率為 60Hz,在兩眼要求輪流 看到影像的狀況下,其顯示器的顯示頻率將被要求到達 2 倍(120Hz),傳統 CRT (Cathode Ray Tube)顯示器的螢光屏為磷化物製成,因為速度過快其磷化物的餘 輝效應,影像常常相互干擾,而影響其立體的成像效果,如圖 3-14。
22 圖 3-14 時間多工法示意圖 XpandD 在電影界使用的電子式快門眼鏡就是時間多工法的應用,如 圖 3-15,快門眼鏡的兩個鏡片為可透光的液晶面板,當液晶板遮蔽光線時,眼鏡 就會變成黑色,當投影機快速交替投射左右眼畫面時,快門眼鏡只要快速 ON/OFF 左右眼鏡片,就能讓左右眼只看到該看的內容,而達成立體顯示效果。既然有了 這樣的功能,自然需要電源,眼鏡裡面內含電池,所以才稱為「主動式」眼鏡。 另外,其技術強調可無縫與具備立體顯示功能的 LCD 面板、電漿面板和數位光源 處理技術 DLP(Digital Light Processing)顯示螢幕結合,並開發出所謂 pi-cell 的液 晶胞技術。當電子快門遮蔽左右眼時,可更加快速轉換,也能夠更加寬視域,更 可強化鏡面穿透率的消光比(extinction ratios)。 此技術所採用的電子式快門眼鏡維護成本高,每副約 500 美金,因此立體顯 示電影院較不願意採用此一技術;不過電子式快門眼鏡最大的優點在於它不透過 任何偏光或濾色過程,所以畫面的安定感是所有技術最高的;也就是說,當左眼 只看到左眼該看的畫面時,畫面是沒有經過任何改變與扭曲的,會保有最高解析 力和色彩準確性。
23 圖 3-15 XpanD 眼鏡式時間多功法立體顯示技術示意圖 4.位置多工法[26]: 此方法亦稱為 Pulfrich 立體成像法。在西元 1922 年的德國天文學家 Carl Pulfrich 所發明【26】,當人眼在觀看一個物體做簡單的左右直線來回移動時,若 其中一隻眼睛被一片較暗的濾片遮住(像是墨鏡),此時,觀察該物體的運動軌道, 將成一個橢圓形。此效應是因為人腦對於明亮刺激的認知比陰暗刺激的認知來得 靈敏和快速,因而產生的光學幻覺。於是人眼對此種刺激感應的快慢,在腦中形 成視覺的誤差,而有了空間的立體感。如圖 3-16 所示,當物體由左向右移動時, 左眼被一片濾鏡擋住,導致兩眼反應快慢不一,兩眼的聚焦軌跡會往後形成橢圓 形,此時兩眼聚焦距與實際物體軌跡形成視差產生立體感, 反之亦然。當物體由右 往左移時,則兩眼聚焦軌跡則在實際物體軌跡前方成橢圓形,與原來的實際物體 軌跡形成視差,產生立體感。 所以在製作此種立體影像時,其照相設備和拍攝物體必需一直不停的往同一 個方向移動,若是停下來,就無法形成視差,也就無法產生立體影像。其方便的 地方,則是影像內容不需另加其他處理,只有載上眼鏡的人可以看到立體影像, 但是其他沒載眼鏡的人,則是看到一般的平面影像。
24 圖 3-16 位置多功法示意圖 3.2.2 裸眼式立體成像技術 裸眼式是立體顯示追求的最終極目標,也是國際技術目前研發的主要方向, 其中以視差遮障法、堆疊立體法及圆柱透鏡陣列法這三種技術發展較久,也是目 前採用最多的技術。以往裸眼觀看立體顯示,兩眼需固定不能隨意移動,長久觀 看也易造成人因問題,於是多視角影像的立體顯示以及結合攝影機人眼追蹤技術 的 Auto-Tracking 立體顯示器技術成為研發方向,不過由於多視角影像會大幅降低 立體影像的解析度,於是有 slanted lenticular 及 slanted parallax barrier 的技術發 展以解決解析度不足的問題。至於全像術立體顯示,雖然是最理想的立體顯示方 式不過於由於技術難度高,現在仍屬實驗室研發階段。 1.視差遮障法[25]: 其方法乃是將欲觀賞的左右眼影像先分割成等距的垂直線條狀,然後將垂直 線條狀相互交錯的排列在一起,例如奇數列為左眼的觀賞影像,偶數列則為右眼 的觀賞影像。再將印有透光與不透光相互交錯的平行直線隙縫光柵片,放置離觀 賞圖片上面的一定距離上,則因為隙縫遮障的效果,左右眼會分別看到隙縫下的 左右圖像,再經過人腦將影像融合,形成有立體感的影像。如圖 3-17 所示。
25 圖 3-17 視差遮障法示意圖 2.堆疊立體法[27]: 此技術在 1908 年首先由 Lippmann 發表,是記錄光線在空間角度的分布以達 成立體顯示的目的,隨著高解析攝影機和空間光調節器的問世,使得和此技術有 關的研究如雨後春筍般的快速發展;圖 3-18 顯示 1996 至 2008 年在 OSA(Optic Socity of America)發表和此技術相關的論文和研討會數量成長的情況。 圖 3-18 1996 至 2008 年在 OSA 發表和此技術相關 的論文和研討會數量成長的情況
26 圖 3-19 顯示了堆疊立體法技術的概念,原始物體的影像是透過影像偵測器上 的凸透鏡陣列所取得,例如 CCD (charge-coupled device)透鏡陣列上的每一個獨 立凸透鏡稱之為單元透鏡(elemental lenses),單元透鏡上的影像稱之為單元影像 (elemental images),透過凸透鏡陣列的作用,影像可以在任何方向顯示出立體效 果,因整個陣列形狀類似蠅眼(Fly’s-eye),故也稱堆疊立體法。立體顯示資料處理 數位化(Digitally processed 3D data)主要目的是使每一個單元影像可以透過數位 化的處理過程明確的取得,進而對於不同的應用顯示物體的立體顯示影像。 圖 3-19 堆疊立體法技術的概念 3.圓柱透鏡陣列法[27]: 乃是利用塑膠、壓克力或是玻璃的板材,一面為鑄刻成圓柱形浮雕狀的陣列 板,另一面則為平滑的亮面。由於每一柱狀透鏡的光學特性,當眼睛由柱狀面往 平滑面觀看,則會因為其狀柱透鏡的效果,左、右眼會分別看到透鏡下左右兩個 不同的影像如圖 3-20 所示,當影像放入的愈多,則人眼看到的影像則會愈立體。 本論文將於下一章會詳細介紹柱狀透鏡陣列法立體成像的光學原理。 圖 3-20 圓柱透鏡陣列法示意圖
27 因此,利用兩眼視差看到不一樣的影像,而產生立體感,仍然是目前常運用 的技術。而且未加輔具的立體顯示系統,相當方便,也不會因為長載輔具而產生 不適感,而且多人同時觀賞的話,可增加情感交流、提高娛樂效果。所以,本實 驗所使用的柱狀透鏡陣列立體法即有上述效果。若能廣泛運用,將可以大幅提昇 其應用範圍在視聽娛樂、模擬操作等…提昇其效果。 4.立體全像術[28]: 一般全像拍攝分為兩個步驟,第一步驟是利用干涉法拍攝全像圖,從雷射光 發出相干光束被分成兩道光束,照到拍攝物體上的光被反射或散射到感光全像片 上,稱為物光。另一道光束投射到面鏡,被反射光波直接照射到感光全像片上, 稱為參考光。物光與參考光在感光全像片上疊加干涉,產生干涉圖像記錄物體的 振幅與和相位的全部訊息,這張感光底片經過曝光、顯影、定影及水洗烘乾後即 形成一張全像片。 第二步驟是利用繞射原理將全像片上的信息重建,由於全像片記錄的是物體 的兩個相干光相互干涉結果,直接看這個全像片時只看到一些干涉條紋,無法看 到原來被拍攝物體。當把全像片放回原處並用原相干參考光照射全像片後,產生 繞射光波,由於光波中含有原物體光波的振幅與相位,所以觀察者以雙眼直接觀 察繞射的光波時可看到一個逼真的立體圖像。對於一般人而言,以雷射光重建全 像片來觀察立體影像較不普及,而是以一般的白光下來觀察全像片較為經濟。但 由於白光是多種波長的光混合,因此會在全像片上出現很多重疊錯位的影像使人 無法看清楚,所以拍攝全像片若要在白光下看到立體效果,一般採用彩虹全像片 和反射式傅立葉變換全像等術【29】。圖 3-21 為用彩虹全像片拍攝後,重建立體 影像時從不同角度所拍攝到的效果。圖 3-21(a)為從左邊方向所拍攝到的效果,圖 3-21(b)為從中間方向所拍攝到的效果,圖 3-21(c)為從右邊方向所拍攝到的效果。 (a) (b) (c) 圖 3-21 彩虹全像片重建立體影像後以三個不同觀察角度所拍攝 (a)左邊拍攝效果(b)中邊拍攝效果(c)右邊拍攝效果
28 3.3 立體影像技術未來發展趨勢 現階段電子大廠忙著讓自己的產品「泛立體化」,立體電視、立體螢幕、立體 投影機…..,產品發表態勢令人目眩神迷。根據市調機構 Displaysearch 研究,2018 年,立體顯示器即將上推 1 億 960 萬台,想順利攻下市場,立體顯示標準現在正 是關鍵。正因觀眾需要更新的視覺體驗,制定一套眾人信服,放諸四海皆準的立 體顯示標準絕對是重要關鍵。 為何制定標準這麼重要,我們以眼鏡式的立體影像技術為例,眼鏡式立體顯 示技術發展久、技術成熟,其中主流的技術就有四種不同的格式並搭配不同的眼 鏡,但缺乏統一的立體顯示標準;試想,某天當立體顯示技術進入家家戶戶的客 廳,不同的電視尺寸、不同觀賞距離與角度、甚至不同觀賞的姿勢…..,由此可知 制定統一的標準是刻不容緩的。有了統一的標準,製造硬體的廠商才有依循,軟 體的廠商才願意花錢開發立體影像相關的節目內容,正因為立體顯示產業的硬、 軟體緊密相扣,硬體需要標準,軟體當然也需要,有了硬、軟體的配合後才能吸 引更多的消費者夠買立體顯示的相關產品。 立體顯示說穿了就是要回歸自然,眼鏡式立體顯示技術只是一個過度,如何 讓消費者可以舒適的觀賞立體影像才是最終的目標,因此本論文所提出利用圓柱 透鏡陣列來達成舒適觀賞立體影像的方法,就是著眼於立體影像技術未來的發展 趨勢!!
29
四、實驗與分析
本論文提出即時立體影像擷取與實體重建技術,是架構在圓柱透鏡陣列上,以達成 裸眼即可觀賞立體影像的目標。要達成這樣的目標,必然先要對圓柱透鏡陣列的顯示原 理做深入的了解,這樣才有可能進一步提出實驗架構、證明此技術的可行性。 因此,本章首先就圓柱透鏡陣列顯示原理做深入的介紹,內容包含圓柱透鏡的光學 特性、與圖像的分割關係及平面影像如何搭配圓柱透鏡陣列而達成立體顯示的效果。緊 接著介紹本論文提出的實驗架構、實驗設計及結果與分析。經由理論推導、模擬及實驗 驗證以探求其可行性及影響此技術的因素。 4.1 圓柱透鏡陣列法立體顯示原理4.1.1 單一圓柱透鏡的光學特性 單一圓柱透鏡可以視為一面為曲面和另一面為平面的光學透鏡的結合,若平 行光線射由透鏡的左方射入球面的某一點時,入射光與折射光會因為兩介質折射 率的不同(當折射率 n 大於折射率 n’),改變折射的角度如圖 4-1。且入射光與折射 光要滿足 Snell 定律,所以當平行光束射至凸球面時,折射的光線會匯聚至光軸上 的焦點上,此平面稱為焦平面【30】。 圖 4-1 入射光進入柱狀透鏡後之光跡圖 接下來我們討論其成像公式,參數關係圖如下圖 4-2 所示:
30 圖 4-2 單一柱狀透鏡各參數關係圖 圖 4-2 中,當物體 M 所發出的任一條光線,經過透鏡的曲面折射之後,在M' 點成像,其幾何關係式的推導如下: 根據 Snell 定律可知: t i
n
n
sin
θ
=
'
sin
θ
(1) 在高斯光學範圍中,可以將式(1)改成 t in
n
θ
≅
'
θ
(2) 並根據其幾何關係,β
α
θ
i=
+
(3)θ
t=
β
−
φ
(4) 將(3)式除以(4)式,並和(2)式比較後,可以下式: n n t i = ' − + =φ
β
β
α
θ
θ
(5) 而且,'
,
,
s
h
s
h
r
h
≅
≅
≅
α
φ
β
(6) 再將式(6)代入(5)式中,整理後可得下式,r
n
n
s
n
s
n
+
=
'
−
'
'
(7)31 上式為單一球面對物體的成像計算,稱為高斯公式。 當此系統為匯聚作用的球面系統時,當物在左邊無窮遠的地方發光(s=+∞), 該物體所發出的光對該球面系統而言,可近似於平行的光束。所以由(7)式知:
'
'
f
s
=
(8) 另外,若物體放置在第一焦平面上(s= f ),由第一焦平面定義可知,其成像將在 右邊無窮遠處,則+∞
=
'
s
(9) 將(8)式和(9)式代入(7)式中可得, f n r n n f n = '− = ' ' (10) 由(10)式說明,在此球面系統中兩個焦距並不等長,而且與折射率有關。 在求出其焦點和折射率的關係式之後,我們還需知道其成像的放大率和方位 (正立或倒立),因此,藉由圖 4-3 可知: 圖 4-3 單一柱狀透鏡放大率與方位關係圖 在ΔQMO與ΔQ′M′O兩相似三角形中,其邊長比的關係式如下: r s r s y y + − = − ' ' (11) 其像y′與物高y的比值,在此定義為橫向放大率,以 m 來表示,所以就等於:r
s
r
s
y
y
m
+
−
−
=
≡
'
'
(12)32
在此式(12)中若橫向放大率為正值,則其所成的像和物像同一方向的虛像, 若該值為負值,就表示所形成的像和物像相反的實像。如圖 4-4 為一個市面上使 用的圓柱透鏡陣列板其相關設計參數圖,舉例說明,假設該柱狀透鏡陣列板為 52LPI(Lens Per Inch),即在每一英吋中有 52 條柱狀透鏡,所以其 Pitch 值即 為單一柱狀透鏡的寬度 1/52 英吋=0.01923 英吋(0.04884 公分),曲率半徑 r 值為 0.011 英吋(0.02974 公分),成像焦距(即厚度)為 0.0242 英吋(0.06147 公分),可 視角為 72 度。 圖 4-4 柱狀透鏡陣列板設計參數圖 4.1.2 柱狀透鏡陣列與圖像分割關係 一般在觀看圓柱透鏡陣列立體圖像時,如圖 4-5 所示,因為欲觀看的圖像安 置於圓柱透鏡陣列下方,其安置的平面亦為該圓柱透鏡的焦點,如圖 4-6 所示。 因此從透鏡外往透鏡內觀看觀看圖像時,所有平行的光線會匯聚至透鏡的焦點 上,看到透鏡下方的圖像,而人眼因為在不同的位置,而看到不同的圖像。所 以,當我們將多個不同視角的圖案置放於柱狀透鏡陣列板時,必需將圖像分割為 多個細條狀的圖像,再依序將多個不同的圖像融合起來。當人眼透過圓柱透鏡陣 列觀看圖像時,因為角度的不同,看到的圖像也不相同,因此在大腦融合成一張 立體圖像。如圖 4-5 所示,由於我們是左右方向觀看立體圖像,所以在製作圖 像"A"或是"B"時,必需先分割後再依序排列,當圖像經過圓柱透鏡陣列板到 達人眼時,即成為不同的圖像。
33 圖 4-5 柱狀透鏡陣列板與觀賞圖像關係圖 所以,在觀賞位置觀看圖像時,不同圖像經過圓柱透鏡陣列板後到達人眼, 並在左、右兩眼呈現不同的圖像,讓人眼看到不同角度影像產生立體感。 4.2 平面影像立體顯示原理 如何將平面顯示的影像立體化?平面的影像經過圓柱透鏡陣列,將光線折射 後,觀察者可在圓柱透鏡陣列的同一側,看到在不同方位的圖像,由於兩眼看到 不同角度的影像,並因為人眼視差的關係,在人腦中將圖像結合形成立體圖像, 如圖 4-6 所示。 圖 4-6 平面圖像立體效果示意圖
34 4.2.1 立體影像製作原理 平面影像有立體效果就是讓物體的前後景位置不同,或在左右眼觀看物體時 會有位移的效果。我們利用此效果製作圖像底稿,並將處理過後的圖像底稿貼合 於圓柱透鏡陣列板,產生有景深的立體圖像【31】。圖 4-7 中,假設我們觀看有五 個物體分別排列在一直線上,而人眼就有如攝影機一般的分別於位置 A、B 和 C 上,看到的圖像會因為視差角度的不同,而看到如攝影機上的圖像。攝影機 A 看 到的圖像是由右向左排列;攝影機 C 看到的圖像是由左向右排列;攝影機 B 是因為 剛好在正中間,所以影像為數字全部疊加在一起。 圖 4-7 立體影像觀看示意圖 接下來在圖 4-8 中,我們將在圖 4-7 中攝影機所拍攝的圖像還原至平面時, 當以數字 3 為中心點時,數字 1、2 在中心點之前,而數字 3、4 在中心點之後, 我們觀察攝影機 A 往攝影機 C 的位置移動時,數字在中心點之前的會往左做位 移,而數字在中心點之後的則往右移。所以,當我們在製作平面立體影像時,除 了中心點的影像不動外,我們需將前景或是後景的影像做適當的位移,其向左位 移或是向右位移,則需對應圓柱透鏡陣列的圖像擺放位置。
35 圖 4-8 平面圖像位移示意圖 接著,我們將圖像底稿透過電腦軟體做位移後,將每個圖像分解成多條長條 狀的圖像,再依不同圖像的位置,依順序結合起來。並透過圓柱透鏡陣列,在同 一個位置看到不一樣的視角影像,如圖 4-9。由於兩眼看到不同位置的圖像,並 根據視差原理,由視神經感測後透過大腦的將這些不同圖像組合立體圖像。 圖 4-9 位移後立體圖像觀看示意圖
36 4.2.2 圓柱透鏡陣列板與圖像排列關係 當我們多個圖像安置(貼合)於圓柱透鏡陣列下方時,會將圖像由左至右或 是由右至左逐一的安置在圓柱透鏡陣列下方。但是,有時會因為圖檔所佔的記憶 容量過大,導致電腦運算時間太久。或是圖像的輸出設備的解析度過低,或是想 放入多個不同角度的圖像時,我們往往採用以間格的方式,將不同角度的圖像底 稿放入圓柱透鏡陣列下方。 我們以 6 個不同角度的圖像底稿為例,圖 4-10 的排列方式是以一個圓柱透鏡 陣列放入多個不同角度的圖像,圖像 1 至 6 由左至右依序排列。而圖 4-11 則是利 用 2 個圓柱透鏡放入 6 個不同角度的圖像,其排列式則是單數圖像與雙數圖像需 分開置放,如此才能達到不同角度的成像效果。如果有三個或是多個以上的柱狀 透鏡成像時,如圖 4-12,圖像的排列則依序的排列下去,到達欲成像的透鏡數時, 再回到第一個圓柱逶鏡依序排列。 多個圓柱透鏡成像的立體圖像與單一圓柱透鏡的立體圖像比較時,兩者景深 效果大致相同,但是解析度則是會依據使用圓柱透鏡的數目成倍數的降低。因為 解析度降低,在製作圖像所費的電腦計算時間也可以縮短。所以,可藉由此種方 法運用在解析度比不上印刷機的輸出元件。 圖 4-10 單一圓柱透鏡平面圖像排列法 圖 4-11 2 個圓柱透鏡平面圖像排列法
37
圖 4-12 3 個圓柱透鏡平面圖像排列法
4.2.3 觀看距離與 Pitch 數關係
圓柱透鏡陣列板材料的 Pitch 值是控制準確性的重要關鍵技術。圖 4-13 說明 觀看距離與 Pitch 值大小的關係。實際 Pitch 值必須大於印刷輸出時的 Pitch 值, 觀看距離 D 與兩者 Pitch 值 S’與 S 的關係(計算方法的資料來自美國 RIT 教學資料) 【32】為:
nD
t
S
S
+
= 1
'
(13) 舉例說明:當材料折射率 n = 1.567,厚度 t = 0.050 inches, 觀看距離 D = 1 feet (12 inches),則由(13)式可算得S'/S=1.00266,當圓柱透鏡之 Pitch 大小為S'=50/inch,印刷輸出時的 Pitch 值為S =50/1.00266=49.87/inch。
38
上述(14)式的觀看距離與 Pitch 的數學關係可用幾何光學來證明其數學關係 式,可用圖 4-14 來說明解釋,首先以 Snell 折射定律求得以下式子:
sin
'sin
'sin
'sin
'n
n
n
θ
=
θ
⇒
θ
=
θ
(14) 以三角形相似定理可導出以下式子θ
θ
sin sin ' ' ' ' ' ' ' S S S D t D t D t D D t D − = = ⇒ + = + (15) (15)式經整理後導出以下式子:n
D
t
S
S
S
D
t
S
S
S
n
' ' ' ')
(
sin
sin
)
(
=
−
⇒
=
−
θ
θ
(16) (16)式經整理後即可導出(13)式,nD
t
S
S
+
= 1
'
。 圖 4-14 觀看距離與 Pitch 數的幾何光學關係式 4.3 實驗架構 前兩節,我們討論了單一圓柱透鏡的光學成像原理、圓柱透鏡陣列如何將平 面影像立體化以及圓柱透鏡陣列的製程與最佳觀賞距離。傳統圓柱透鏡陣列立體 成像原理是多角度節取影像後,配合特殊軟體產生交錯疊合之影像,並將其放至39 於圓柱透鏡陣列之焦平面附近,使觀賞者在不同方向可以看到不同角度的影像, 藉由兩眼間距與圓柱透鏡陣列可視角的視覺關係,可使兩眼產生視差而產生立體 效果,如圖 4-6。 本論文所提出的技術有別於傳統圓柱透鏡陣列立體成像技術,最大的差異在 於(1) 即時的影像擷取及(2)立體影像的重建。影像擷取方面,利用光學透鏡組將 物體影像投影至圓柱透鏡陣列表面,投影至圓柱透鏡陣列表面的物體影像,會因 為圓柱透鏡陣列而重新編碼形成不同角度之交錯影像。立體影像的顯示方面,將 圓柱透鏡陣列改裝於高畫素之單眼數位相機內,藉由數位相機內改裝後的感光元 件,直接擷取經圓柱透鏡陣列重新編碼形成不同角度之交錯影像,經過重新編碼 形成不同角度之交錯影像,再經由感光元件上的圓柱透鏡陣列重組而形成立體影 像;影像擷取及顯示示意圖如圖 4-15,相機改裝示意圖如圖 4-16。 本論文所提出的技術優點在於,不需要電腦處理、製作交錯影像,可以節省 時間和製作的成本,最重要的是可以達成“即時"顯示的效果。但其技術的關鍵 部分就在於影像的擷取及顯示。因此,實驗設計是依此兩部分為架構,並對實驗 結果進行分析,期望透過科學方法對此技術做初步可行性的探討。 圖 4-15 影像擷取及顯示示意圖
40 圖 4-16 相機改裝示意圖 4.4 實驗設計 4.4.1 影像的擷取 此架構以市售美國 PACUR 公司出產的圓柱透鏡陣列板來模擬測試。考量鏡 頭對焦及需擷取較遠及較大之影像,並解決感光度及曝光度不足之窘境,我們利 用單眼數位相機(Cannon EOS 350D, 22.2mm*14.8mm CMOS 約為 800 萬有效 像數)直接擷取成像於圓柱透鏡陣列焦平面附近之影像,以達到與本論文所提架構 最相近之模擬效果,如圖 4-15。 1.數位相機直接擷取圓柱透鏡陣列板正視角焦平面之影像模擬測試: 利用光學透鏡組將不同物體(魔術方塊及人形娃娃)影像投影至圓柱透鏡陣列 板的正面,並利用單眼數位相機在正視角的情況下,截取成像於圓柱透鏡陣列板 焦平面附近之影像。所得魔術方塊及人形娃娃影像分別如圖 4-17 及圖 4-18。
41 圖 4-17 正視角情況下魔術方塊影像 圖 4-18 正視角情況下人形娃娃影像 從圖 4-17 及圖 4-18 可以發現幾個特點:(1)從影像可以清楚的看見每一個圓柱透 鏡將物像分割的情況(2)越靠近中間部分的影像亮度均勻、無殘影,顯示圓柱透鏡 陣列板將物像作均勻的分割。(3)位於側邊部分的影像(紅色圓圈處),圓柱透鏡出 現亮度不均勻的現象,主要是因為有部分視角的物像並未通過該圓柱透鏡。 2.數位相機直接擷取圓柱透鏡陣列板右視角焦平面之影像模擬測試: 讓數位相機隨機向右偏移某一個角度並直接擷取成像於圓柱透鏡陣列板焦平 面附近之影像。主要的目的是藉由位在不同視角的數位相機,取得的影像,來了
42 解物像被圓柱透鏡列板分割的情況。所得魔術方塊及人形娃娃影像分別如圖 4-19 及圖 4-20。 圖 4-19 右視角情況下魔術方塊影像 圖 4-20 右視角情況下人形娃娃影像 從圖 4-19 及圖 4-20 可以發現幾個特點:(1)不論是魔術方塊或是人形娃娃,影像 仍然清晰可見,不過整體亮度和正視角影像相比,明顯暗了許多。(2)向右偏移的 情況下,魔術方塊或是人形娃娃的影像和正視角影像相比,在影像的最左邊有部 分影像無法看見(紅圈處),主要原因是最左邊的影像已超過圓柱透鏡陣列的可視角 範圍,因此無法透過圓柱透鏡陣列板的分割讓眼睛看見。(3)魔術方塊或是人形娃 娃最右邊的影像和正視角影像相比,有出現疊影(黃圈處),主要原因是物體的邊緣
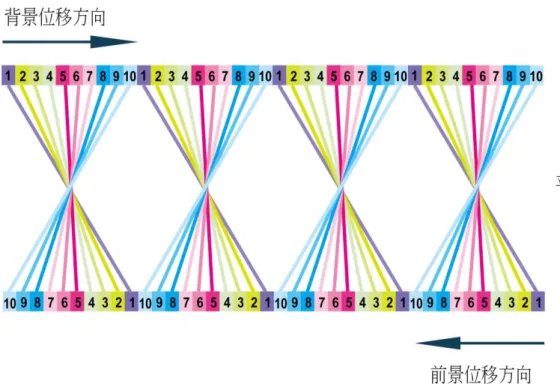
43 容易造成光的散射,散射的光經過圓柱透鏡陣列板的分割是造成疊影的主因。 3.數位相機直接擷取圓柱透鏡陣列板左視角焦平面之影像模擬測試: 讓數位相機隨機向左偏移某一個角度並直接擷取成像於圓柱透鏡陣列板焦平 面附近之影像。主要的目的是藉由位在不同視角的數位相機,取得的影像,來了 解物像被圓柱透鏡列板分割的情況。所得魔術方塊及人形娃娃影像分別如圖 4-21 及圖 4-22。 圖 4-21 左視角情況下魔術方塊影像 圖 4-22 左視角情況下人形娃娃影像


![圖 3-10 Dolby 眼鏡式彩色多工法立體顯示技術示意圖 2.極化多工法 [25]:](https://thumb-ap.123doks.com/thumbv2/9libinfo/8333777.175576/30.892.237.742.111.489/圖31Dolby眼鏡式彩色多工法立體顯示技術示意圖2極化多工法25.webp)